
MRI−PET複合型イメージャのためのシステム及び方法
【課題】MRI−PETのほぼ同時撮像の実行が可能な一体型PET−MRIシステムを提供する。
【解決手段】MRI−PET複合型イメージャ(100)は、対象のMR撮像を実行するMRIボア(120)を含む。MRIボア(120)は、MRIボアとMRIボア内部の対象の間にクリアランスを提供できるようなサイズとしている。MRI−PET専用イメージャはさらに、対象からのPET放出を検出するようにMRIボアの外部に配置させたPET検出器システムを含む。PET検出器システム(130)は、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子を含む。PET収集の間においてPET検出器素子は、PET検出器と対象の間に最適なクリアランスを提供できるようなサイズまで縮んでいる。MRI収集の間にはPET検出器は、MRI視野域内への対象のトラバースを可能にするように後退する。
【解決手段】MRI−PET複合型イメージャ(100)は、対象のMR撮像を実行するMRIボア(120)を含む。MRIボア(120)は、MRIボアとMRIボア内部の対象の間にクリアランスを提供できるようなサイズとしている。MRI−PET専用イメージャはさらに、対象からのPET放出を検出するようにMRIボアの外部に配置させたPET検出器システムを含む。PET検出器システム(130)は、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子を含む。PET収集の間においてPET検出器素子は、PET検出器と対象の間に最適なクリアランスを提供できるようなサイズまで縮んでいる。MRI収集の間にはPET検出器は、MRI視野域内への対象のトラバースを可能にするように後退する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は全般的には磁気共鳴撮像(MRI)及び陽電子放出断層(PET)のテクノロジーに関する。より具体的には本開示は、PETとMRIのテクノロジーをPETとMRIのほぼ同時撮像が可能な複合型スキャナに統合させるシステム及び方法に関する。
【背景技術】
【0002】
外傷性脳損傷、アルツハイマー病、パーキンソン病、てんかん及び別の形態の神経障害のための撮像に対する関心が高まりつつあり、脳及び神経研究において磁気共鳴撮像(MRI)と陽電子放出断層(PET)の複合テクノロジーが大幅な躍進を示している。生理学的及びメタボリックの状態評価におけるMRIのずば抜けた軟部組織コントラスト及び高特定性とPETの優れた感度とが一緒になると、診断のための形態学情報、機能情報及びメタボリック情報の精細な組み合わせを提供することができる。幾つかのMRI−PET複合型撮像技法が提唱されてきた。
【0003】
一手法では、2つの別々のスキャナによってMRI及びPET撮像を実行し、後で診断のために画像融合方法によってこの2つの画像情報を合成するようにしている。アファイン変換及び変形可能(deformable)変換を利用した高度な画像融合のための幾つかの手法が開発されているが、別々のスキャナで順次収集した撮像データの正確な空間的相関は幾つかの理由のために限界がある。例えば、患者の再位置決めによって、セクション向きの相違並びに臓器の形状及び位置の変動が生じる。さらに最新式の位置調整アルゴリズムは、すべての変形を正確に位置調整することが不可能であり、また臨床医が融合画像を読影する際の信頼度が損なわれることがある。
【0004】
患者の再位置決めを行うことなく単一の検査で形態学データと機能データの時間的及び空間的な相互位置調整を可能とさせる混成システムによれば、改良型のデータ整列を達成させることができる。こうした混成システムは、第1のシステムタイプにおいて第1のスキャナと第2のスキャナが搬送レールを通じて互いに接続されるようにして開発されている。搬送レール上に検査対象物の保持が可能なテーブルが設けられており、これによりPET画像とMRI画像が順次取得される。しかしこうしたシステムには幾つかの欠点がある:例えば、対象搬送レールが占有するスペースが大きいこと、また搬送レールを通じて対象を第1のスキャナから第2のスキャナまで搬送する際にかなりの時間が費やされること、などである。
【0005】
混成式MRI−PETシステムの別の構成では、2つのモダリティのうちより小さい方であるのが一般的であるPETスキャナがMRIボアの内部に配置される。こうした配列では、PETスキャナがMRIの典型的には高い磁場環境に曝されており、この2つのシステムの間に電磁気干渉(EMI)の形態の干渉または相互作用が生じ、これによりその性能に悪影響が生じる。さらにRFコイルのようなMRIデータ収集ハードウェアはPET信号を減衰させ、さらにPET性能を低下させることになる。上述の幾何学構成でMR/PETの同時撮像を可能にさせる得るが、MRIイメージャもまたその視野域内にPET検出器が存在しているため脳撮像について最適に至らずMRデータ収集システムの効率が低下する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願第20100217112号
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、所与の対象物についてMRI−PETのほぼ同時撮像を実行すること並びに上述の欠点に対処することを専らとする一体型PET−MRIシステムに対する必要性が存在する。
【課題を解決するための手段】
【0008】
一態様では、脳などの対象に対する撮像を実行するための専用磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャを提供する。この専用MRI−PETイメージャは、対象のMR撮像を実行するように構成されたMRIボアを含む。本MRI−PET複合型イメージャはさらに、対象からのPET放出を検出するようにMRIボアの外部に配置させたPET検出器システムを含む。PET検出器システムは、MRIボアの外部で後退(retract)可能に配列させた少なくとも1つの検出器素子を含む。
【0009】
別の態様では、対象の撮像を実行するための複合型磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャを提供する。本MRI−PET複合型イメージャは、対象のMR撮像を専ら実行するように構成されたMRIボアを含む。このMRIボアは、MRIボアとMRIボア内部の対象の間に最適なクリアランスを提供できるようなサイズ設定としている。本専用MRI−PETイメージャはさらに、対象からのPET放出を検出するようにMRIボアの外部に配置させたPET検出器システムを含む。このPET検出器システムは、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子を含む。
【0010】
さらに別の態様では、MRI−PET複合型イメージャを製造する方法を提供する。本方法は、MRIボア内部に位置決めされた対象のMR画像を取り込むようにMRIボアを構成するステップを含む。本方法はさらに、対象からのPET放出を検出するようにMRIボアの外部に、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子を含むPET検出器を配置させるステップを含む。
【0011】
また別の態様では、MRI−PET複合型イメージャにおいて対象のMRI−PET複合撮像を実行する方法を提供する。本方法は、MRI視野域(FOV)内に対象をトラバースさせるためのクリアランスを提供するためにPET検出器の検出器素子を後退させるステップを含む。MRI FOV内に位置決めされた対象のMR画像が取り込まれる。本方法はさらに、PET検出器FOVの内部に対象を受け容れるステップと、PET検出器と対象の間に最適なクリアランスが提供されるようにPET検出器素子を再位置決めするステップと、を含む。引き続いて、PET検出器FOVの内部で対象のPET画像が取り込まれる。
【0012】
本システム及び方法に関するこれらの特徴、態様及び利点、並びにその他の特徴、態様及び利点については、同じ参照符号が図面全体を通じて同じ部分を表している添付の図面を参照しながら以下の詳細な説明を読むことによってより理解が深まるであろう。
【図面の簡単な説明】
【0013】
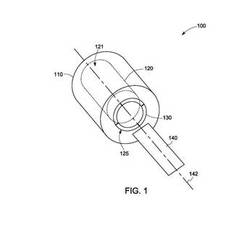
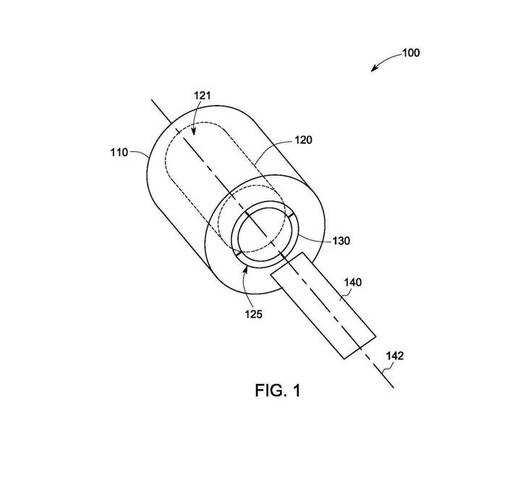
【図1】MRI−PET撮像システムの例示的な一実施形態を表した概要図である。
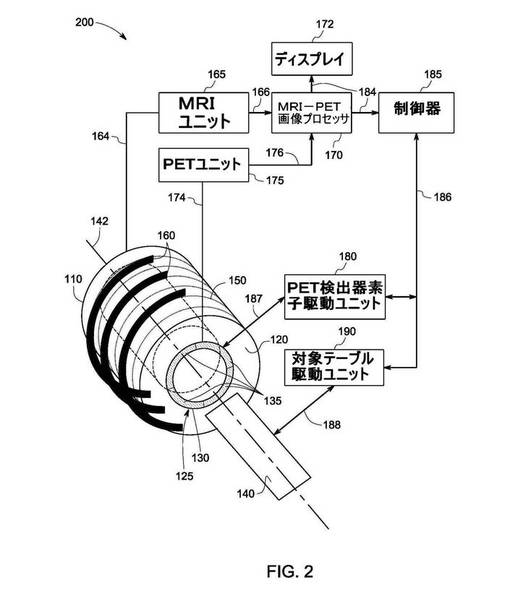
【図2】一実施形態による例示的なMRI−PET撮像システム構成を表したブロック図である。
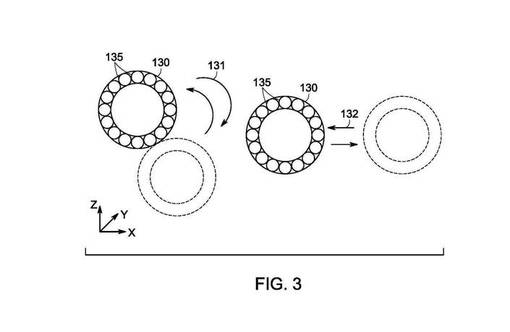
【図3】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図4】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図5】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図6】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図7】一実施形態によるMRI−PET複合撮像を実行する例示的な一方法に関する各ステップを表した流れ図である。
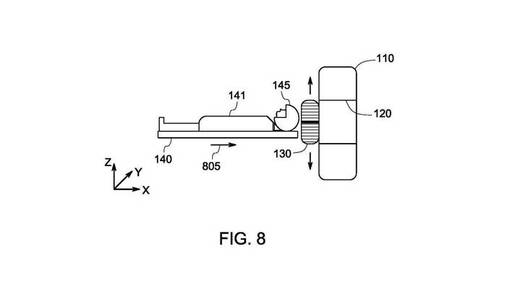
【図8】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
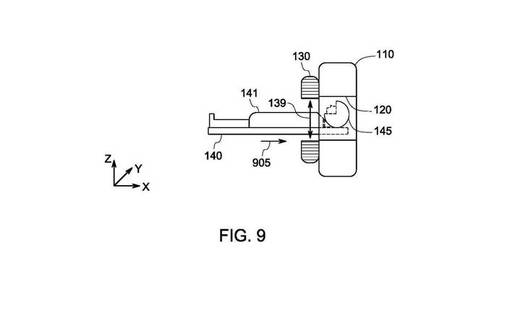
【図9】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
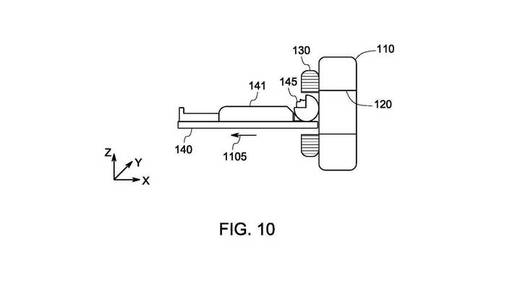
【図10】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
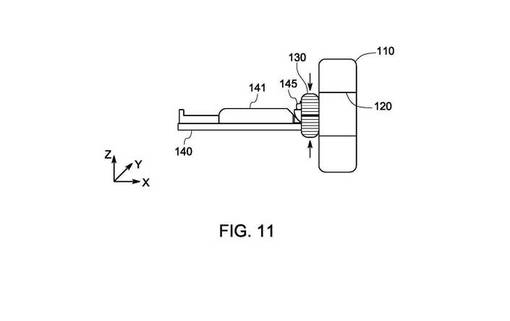
【図11】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
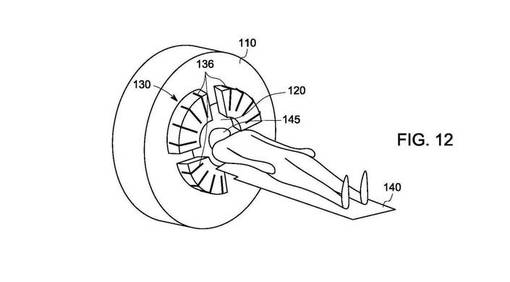
【図12】一実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
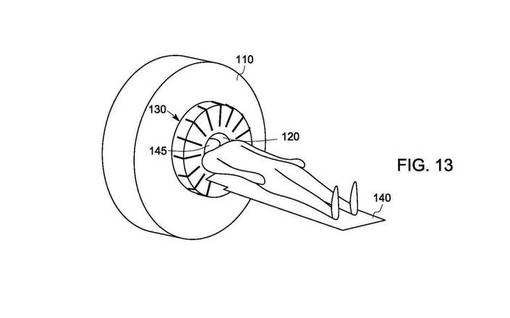
【図13】一実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
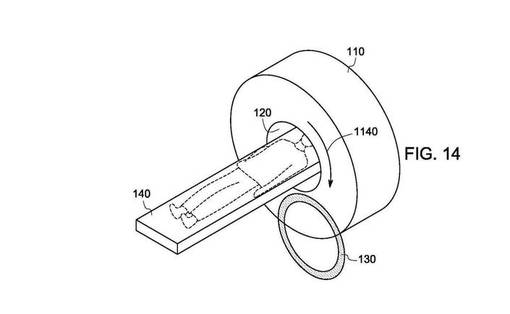
【図14】別の実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
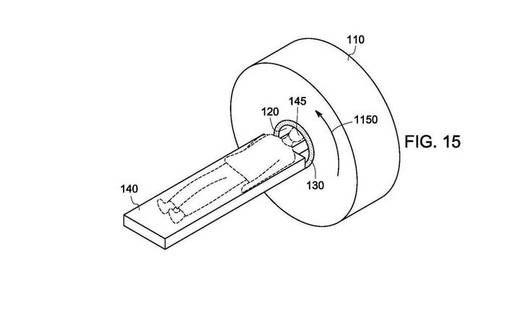
【図15】別の実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
【図16】一実施形態によるMRI−PET複合型イメージャを製造する例示的な一方法に関する各ステップを表した流れ図である。
【発明を実施するための形態】
【0014】
詳細には以下に記載するが、本システムの実施形態によれば対象の撮像を実行するための複合型の磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャ並びにその方法が提供される。一実施形態では、関心対象に対するMRとPETの両方の専用撮像を最適化するようなシステム幾何学構成について記載している。提唱したMRI−PETイメージャは、関心対象に関するPET画像とMR画像をほぼ同時に取得する。
【0015】
図1は、陽電子放出断層(PET)−磁気共鳴撮像(MRI)複合型撮像システム100に関する例示的な一実施形態を表した概要図である。MRI−PET複合型撮像システム100は、対象(図示せず)のMR画像を取り込むためのMRIボア120を有するMRIイメージャ110と、MRIボア120の外部に据え付けられたPET検出器システム130を含んだPETイメージャ125と、対象をPET検出器システム及びMRIボア120内に搬送するための対象テーブル140と、を含む。対象の一例には、生理学状態やメタボリック状態を評価する際にMRIの軟部組織コントラスト及び高い特定性とPETの感度とを併せて得ることが有益であるような人間や動物並びにその他の対象(ただし、これらに限らない)を含む。MRIボア120は、MRI撮像スペース121がMRIボア120の中心を通過するように形成されると共に対象が対象テーブル140上にある間に対象をMRI撮像スペース121内まで移動できるように対象テーブル140が装着されるようにして構成されている。対象テーブル140は、対象を撮像スペース内にまたこれから出るように搬送できるように摺動可能に形成させることがある。
【0016】
MRIイメージャ110は、中空円筒状の幾何学構成を有する主マグネット(図示せず)を含む。この主マグネットは、MRI−PET複合型イメージャ100内における最大かつ最外側の構成要素となっている。この主マグネットは、永久磁石、常伝導電磁石及び超伝導電磁石(ただし、これらに限らない)を含むことがある。この主マグネットは、対象のMR撮像の間に強力で均一な磁場B0を発生させる。MR画像は典型的には、MRI撮像スペース121(明細書の以下においてMR視野域(FOV)と呼ぶ)の中央領域内において(中央領域内部では磁場の均一性が強いため)主マグネットの主軸142に沿って収集される。
【0017】
PET検出器システム130は、対象から放出された同時消滅光子を検出するための1つまたは複数の検出器素子を含む。動作時においてこの検出器素子は、対象から検出器素子の方向に放出された同時消滅光子を検出できるように対象の周りに配列させると共に少なくともそれだけのサイズを有するように構成されている。図示した実施形態ではPET検出器システム130は、MRIボア120との整列を容易にするために円形の幾何学構成を有するように構築させている。具体的にはPET検出器システム130は、MR主マグネットの主軸142に概ね沿うようにMR主マグネットのボア120の近傍に配置させている。一例ではそのPET検出器システムは、ボア120の外部に配置させており、システムの不可分の一部とすること、拡張用構成要素とすること、あるいは必要に応じて配備可能な分離可能構成要素とすることが可能である。
【0018】
図2は、一実施形態によるMRI−PET複合撮像システム200の構成を表したブロック図である。図示したようにMRIイメージャ110は、HF励起パルスを発生させかつ放出される共鳴信号を検出するために、磁場コイル組160から形成された主磁場マグネットと、無線周波数(RF)コイル組150から形成された高周波数の無線波システムと、を含む。
【0019】
無線周波数(RF)コイル組150(MRアンテナと呼ぶこともある)は一般に、磁場コイル160が発生させる磁場B0の中央領域内に配置させている。これらのRFコイル150は、少なくとも2つの機能(具体的には、MR撮像過程の間にRF信号を送信し対象からRF信号を受信するための機能)を有することがある。RF信号の送信の間ではRFコイル150は典型的には、ラーモアのスピン周波数で振動するRFパルスを発生させており、このパルスによって、撮像しようとする対象内の原子核が励起される。RF信号の受信の間ではRFコイル150は、その元の状態までの「緩和(relaxation)」の間に同じ原子核が放出する信号を同じ周波数で検出している。撮像対象が磁場B0の中央領域121に来るようにRFコイル150によって取り囲まれたボアの内部に撮像対象を配置させることに留意されたい。
【0020】
MRIイメージャ110により取り込まれかつ取得された画像信号164はMRIユニット165に送られ、さらに画像とするように変換を受ける。この画像はMRI−PET複合画像プロセッサ170に送られており、ここでMR画像166はPET検出器が検出したPET画像176とで合成またはマッピングを受けることがある。このMR/PETの画像184はディスプレイ172上に表示させることがある。
【0021】
PET検出器システム130は1つまたは複数の検出器素子135を含む。検出器素子135の配列に関しては様々な構成が存在している。一実施形態ではその検出器素子135を、対象を囲繞するリングの形態で配列させることがある。こうしたPET撮像システムのことはまた、静止ブロックリングシステムと呼ぶことがある。別の実施形態ではそのPETイメージャ125はまた、例えば2つ、4つまたは6つのフラット検出器を含むことがある。さらに、PET検出器システム130のトランスアキシャル方向とアキシャル方向の両方の視野域(FOV)をMRIボア120の外部に延ばすことが可能である。
【0022】
アキシャル方向で主軸142に沿ってPET検出器130をステップ状に変位させることによって、多くのPET断層像に関するデータを時間的に連続して収集するのが一般的である。面積が大きい位置検知性の検出器素子を多角形配列でより少ない数だけ用いることも可能である。さらに、検出器素子によって部分的にのみ構成されたリング形状の検出器を用いることが可能である。このリング検出器の例では、必要な計測データを収集するために対象の周りで検出器素子135を回転させている。こうしたPET撮像システムのことをまた、回転ブロックリングシステムと呼ぶことがある。
【0023】
PET検出器素子135は典型的には、アレイ状に配列させかつフォトセンサに結合させたシンチレーション結晶から形成されている。本明細書には一例によるPETイメージャ125が実行する信号処理について記載している。このシンチレーション結晶は、対象から放出された消滅光子を停止させると共にこれらを光シンチレーションパルスに変換している。PET検出器素子135内でシンチレーション結晶が発生させたシンチレーションパルスは、フォトセンサ(図示せず)に送られ、またさらに電荷信号になるように変換される。具体的な一実施形態ではそのフォトセンサは光電子増倍管である。別の実施形態ではそのフォトセンサは、アバランシェフォトダイオード(APD)や半導体光電子増倍器(SSPM)などの半導体フォトセンサである。フォトセンサから出力された電荷信号はPETユニット175内部の信号増幅回路に送られる。信号増幅回路を通過する間にファイン電荷信号は増幅され、さらにこの増幅済み信号はPETユニット175を通過する間にエンコード/デコードを受けてエネルギー、相互作用時間及び位置の情報になる。PET放出からの検出信号は、断層画像再構成と呼ぶ処理を通じて機能情報を備えた画像となるように変換される。再構成画像174は、MRI−PET複合画像プロセッサ170に送られ、さらに単一画像とするように画像プロセッサ170によって合成される。したがって、解剖画像と機能画像をその中で合成させた合成画像が得られる。さらに、複合画像プロセッサ170はそれぞれの画像を選択的に合成して単一画像とすることや、単一画像をそれぞれの画像にするように分離させることができる。処理済みのMR/PET画像はさらに、不揮発性や揮発性の記憶媒体(図示せず)内に保存されることがある。
【0024】
図2には詳細に図示していないがMRIイメージャ110はさらに、主磁場B0に対するx、y及びz方向の磁場傾斜を発生させる傾斜コイルの組を含む。この磁場傾斜は、対象をその内部に配置させるスペース内における距離情報をエンコードするために用いられる。PETイメージャ125はさらに、電子回路(例えば、付属の前置増幅器)やその他の金属構成要素(例えば、遮蔽用のエンクロージャ)を含む。
【0025】
図2は、一実施形態による構成要素間の空間的関係を表した一体型PET−MRIイメージャの斜視図を示している。この例の構成要素は一般に、主マグネット160の主軸142を基準として同心円状にあるいはほぼ同心円状に構築されることに留意されたい。こうした方式で配列させた構成要素を有することが望ましいが、1つまたは複数の構成要素をわずかに軸外れとさせることもある。
【0026】
例示的な一実施形態ではそのPET検出器素子135は、MRIボア120の軸142の周りでトランスアキシャル方向に移動可能となるように構成されている。本明細書で用いる場合に「トランスアキシャル方向」という用語は検出器素子がその上に締結される円形の周縁部に沿った方向を意味している。別の実施形態ではそのMRアンテナ150は、MRIボア120の内部でこれがアキシャル方向142に並進するように据え付けられることがある。本明細書で用いる場合に「アキシャル方向」という用語は、主MRマグネットの軸142でもある対象テーブルをそれに沿って配列させる軸に沿った方向を意味している。
【0027】
トランスアキシャル方向におけるPET検出器システム130の変位並びに対象の周りの回転(必要な場合)は、例示的な一実施形態に従ってPET検出器素子駆動ユニット180の支援を得て実行される。PET検出器素子駆動ユニット180は、流体作動方式(fluid hydraulics)または圧縮空気作動方式(compressed air hydraulics)を利用することがあり、また制御器185から受け取った制御信号に従って動作している。具体的な一実施形態ではそのMRアンテナ150及びPET検出器システム130は、共通の駆動ユニット180を有することや、別々の駆動ユニットを有することがあり得る。この共通駆動ユニットや別々の駆動ユニットは、MRアンテナ150とPET検出器システム130に関するアキシャル方向とトランスアキシャル方向のそれぞれの方向での独立した動きを可能にしている。制御器185は、MRI−PET画像プロセッサ170から受け取ったMRI、PET画像データ184に少なくとも部分的に基づいた制御信号186を提供する。PET検出器システム130の動きを制御するための駆動制御信号187は、ボーデン(Bowden)ケーブル、プッシュロッド、歯付ベルトあるいは機械的または電子的な別の任意の手段の支援を得て駆動ユニット180からPET検出器システム130まで伝えられることがある。
【0028】
別の態様ではそのMRI−PET複合システム200はさらに、対象テーブル140向けの駆動ユニット190を含むことがある。ここでも対象テーブル駆動ユニット190は、制御器185から受け取った制御信号186に従って動作する。対象テーブルの動きを制御するための駆動制御信号188は対象テーブル駆動ユニット190によって提供される。PET検出器素子駆動ユニット180と対象テーブル駆動ユニット190は、PET検出器システム130及び対象テーブル140の運動または位置を検知するための適当な位置センサまたは運動センサ(図示せず)と結合させることがある。制御器185は受け取ったセンサ信号に基づいて、対象テーブル140の動きをPET検出器システム130の素子の動きと同期させるように駆動ユニット180、190に指令する。例えばPET検出器システム130の素子は、MRIボア120の方向に前進している対象テーブル140とタンデムで撮像位置からオープン位置まで拡張するように構成させることがある。同様にPET検出器システム130の素子は、MRIボア120から離れるように引っ込ませている対象テーブル140とタンデムで撮像位置までオープン位置から戻るように後退するように構成されることがある。本明細書で用いる場合にPET検出器システム130は一例において、少なくとも2つの別個の位置(すなわち、撮像位置とオープン位置)で動作する。オープン位置とは、MRIボア開口部からのPET検出器の除去を意味しており、これによりMRIイメージャ120への進入が得られるようなテーブル140上の対象の容易な進入が可能となる。このオープン位置とは、PET検出器素子135の後退とすることも、PET検出器システム130の除去とすることもあり得る。PET検出器システム130に関する撮像位置とは、PET検出器について撮像を可能とさせる位置を意味している。
【0029】
別の実施形態ではそのMRI−PET複合型イメージャ200は、対象の専用撮像を実行するように適応させている。提唱した専用MRI−PETイメージャ200は、PET検出器システム130がMRIイメージャ110のボア120の直ぐ外側あるいはその近傍に位置決めされるように構成されている。専用MRI−PETイメージャのMRIボア120は一例では、関心対象の寸法、こうした寸法の標準的な範囲あるいは事前指定の寸法に従って選択された寸法に対応したサイズ設定としている。一例として、対象の第2のセクションが対象の第1のセクションと比べてより大きなボリュームを有するような寸法の異なる少なくとも2つのセクションを対象が有するものと仮定すると、その関心対象が対象の第1のセクションであることがある。関心対象の専用撮像を実行するために、製造の時点でそのMRIボアを、関心対象とボア120の周縁部の間に必要な最小のクリアランスを提供できるようなサイズ設定としている。一実施形態では要求される最小の間隔は、約10cmと約15cmの間とすることがある。MRIボアのサイズ設定は、ボアを画定するRFコイル及び傾斜コイルのサイズ設定を意味することに留意すべきである。
【0030】
さらにPET検出器130は、PET検出器を用いた撮像を実行するように動作させたときにPET撮像用のスペースを有し得るようなサイズ設定としている。PET検出器システム130のサイズ設定とは、PET検出器システム130の検出器素子135を対象の周りで要求される撮像に適した距離に分布させることを意味する。さらに一例としてPET検出器システム130は、MRIボア120内まで並進させ得るような対象に対するクリアランスを提供できるように対象から半径方向またはトランスアキシャル方向で外方に動的に拡張するように構成されている。本明細書で用いる場合に「動的に(dynamically)」という用語は所与の任意の時点で実行される動作によって特徴付けされる。さらに本明細書で使用する場合に、PET検出器の中心から検出器素子がその上に締結される周縁部への方向が半径方向である。
【0031】
一例では、MRIボア120内部における対象のMR撮像に続いて、対象の第1のセクションをMRIボア120から出しPET撮像スペース内に移動させており、これにより第2のセクションはPET撮像スペースから出るように移動する。PET検出器システム130は、対象の第1のセクションのPET撮像のためにその元の撮像/クローズ位置まで後退して戻るように構成されている。MRとPETの撮像のそれぞれのためにMR及びPETイメージャの視野域間で対象を移動させるために対象テーブルを用いることがある。
【0032】
MRI−PETイメージャ200が人の頭部撮像の専用であり、MRIボア120とPET検出器システム130の両方が頭部を収容するのに必要な最小のクリアランスを提供するような寸法に合わせたサイズ設定となっているような一例について考察してみる。MR撮像のために対象テーブル140が患者頭部をMR FOV内まで前進させたとき、PET検出器システム130は患者肩部がつっかえないようにオープン位置まで後退する。PET撮像の間では、患者テーブル140を引き戻して患者頭部がMRI FOVを出てPET FOV内まで移動するように、PET検出器システム130は患者の頭部撮像のために撮像位置まで後退して戻る。セグメント分割のPET検出器システムのケースでは、これらのセグメントは密着したボア(最適なPET撮像を可能にするための継ぎ目がない(または、継ぎ目が小さい)検出器の場合など)が形成されるように縮まる。本明細書に記載した専用MRI−PETイメージャによれば、最適な高感度で高分解能のPET撮像が提供される。別の実施形態では、PET検出器が取外し可能であり、MRI撮像の実行の際に除去されかつPET撮像の実行の際に再配置される。
【0033】
少なくとも1つの実施形態のMRI−PET複合型イメージャは、主マグネットの主軸142を中心として半径方向に、直線的にあるいは円周方向に変位または拡張し得るPET検出器システム130を含む。PET検出器システム130がこうした移動式構成であるため、PET検出器システム130のトランスアキシャル方向の視野域(FOV)を動的に変更することが可能となる。対象の専用撮像を実行するための具体的な一実施形態では、PET検出器システム130は、対象の指定の区画に対してクリアランスを提供するため並びにPET FOVを動的に調整するために拡張及び後退するように構成されている。
【0034】
PET検出器システム130は、図3〜6に示したような幾つかの異なる構成を有することがある。例えば図3に示したようにPET検出器素子135は、対象(図示せず)を囲繞する1つまたは複数のPET検出器素子135で占有された検出器リング130として構成されている。PET検出器システム130は検出器素子135により完全に占有させることも部分的に占有させることもあり、その検出器リング上における検出器素子の数及び分布は対象の1層または複数層のPET画像作成に要する計測データの収集が検出器システム130を回転させてまたは回転させないで可能となるように選択される。ある向きでは、その検出器リング130をMRIイメージャ及びMRIボアと摺動可能に結合させている。図示のように検出器リング130は、(X、Y、Z方向に沿って)直線的に摺動すること(矢印132で示す)や、主マグネットの主軸の周りに円周方向に摺動すること(矢印131で示す)があり得る。ある配列ではその検出器リング130は、モータやギアアセンブリなどの電気機械的手段によって直線または半径方向摺動ガイドに沿って摺動するように構成されることがある。別の配列ではその検出器リング130は、空動式または油圧式のアクチュエータなどの機械的手段によって直線摺動ガイドに沿って摺動するように構成されることがある。さらに検出器リング130は、摺動子間に摺動子上にピボット点を有する剛性のリンクを用いること、摺動子をベルト、チェーンまたはガイドで接合させること、並びに摺動子をギアを用いて機械的に接合させることなど幾つかの結合用手段によって対象テーブルの動きに伴ってタンデムで摺動するように構成されることがある。
【0035】
検出器素子により部分的にのみ占有されているPET検出器システム130のケースでは、対応するアキシャル方向視野域の第1の完全なPET画像に関する計測データが収集され終わるまで検出器リング130を対象の周りで回転させている。引き続いて対象テーブル140は、対象をアキシャル方向(すなわち対象が支持されている方向)で摺動可能に搬送させることがあり、対象は検出器素子がその上に配列された周縁部に対して垂直に進む。対象をその次のアキシャル方向視野域まで搬送した後、PET検出器システム130の回転によって次のPET画像を記録することがある。PET検出器システム130は、電気的、電気機械的または機械的な任意の手段によって回転させることがある。こうした様々な変位及び回転ステップの間に多数のPET断層像が連続的に収集されており、これによって全体の計測時間が短縮される。
【0036】
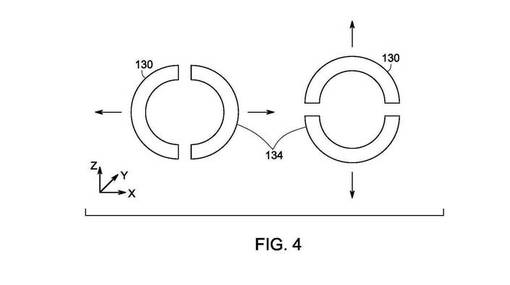
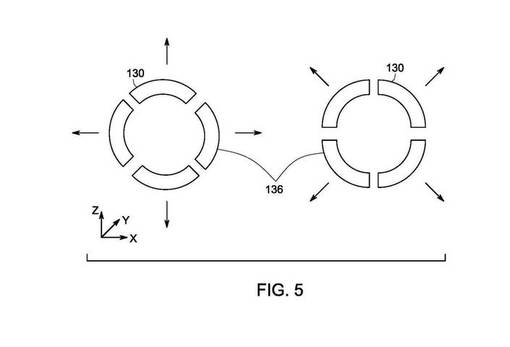
PET検出器システム130はまた、図4〜5に示したように2つ以上のセグメント(具体的に図4ではセグメント134また図5ではセグメント136)に分割させることがある。PET検出器システム130のこのセグメント134及び136は、主マグネット(図示せず)の主軸の周りで半径方向に拡張するまたは縮むように構成されている。
【0037】
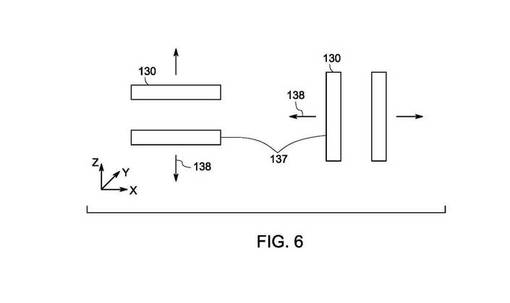
図6に示した別の例示的な向きではPET検出器システム130は、対象の相対する側で互いに平行に配列されると共に、矢印138の方向に拡張できるか完全なデータ収集のために対象(図示せず)の周りでトランスアキシャル方向に回転できるような2つの別々の検出器プレート137として構成されることがある。さらに別の実施形態ではそのPET検出器システム130は、完全な多角形配列で対象を囲繞するために3つ以上の検出器プレート(検出器プレートの数は偶数の事も奇数のこともある)を含むことがある。通常、こうしたPET検出器プレートのことを連続式検出器パネルと呼んでいる。
【0038】
上述のように構築したMRI−PET複合型イメージャを動作させる方法について、図7に示した流れ図700を参照しながら以下で説明することにする。
【0039】
大まかに言えばMRI−PET複合型イメージャにおける対象の撮像のためには、その撮像対象は対象テーブル上に配置されると共に、MRとPETのそれぞれの撮像のためにMRとPETイメージャの視野域間で移動させている。引き続いて作成済みの画像がプロセッサによって重ね合わせられ、これによりMRIの高空間分解能とPETからの機能情報とが組み合わせられる。
【0040】
より詳細には、一実施形態による方法700は、放射性医薬品などのトラッキング用薬剤を注入または吸入により導入することによって対象のPET撮像を準備することを含む。対象は、MRI及びPETのFOV内部に対象が配置されるように対象テーブル上に位置決めされる。対象テーブルをPET検出器システムの方向に前進させるとき、ステップ710においてPET検出器は、対象をMRI FOV内までトラバースさせるためのクリアランスを提供できるように撮像位置からオープン位置まで拡張されまたは排除される。さらにステップ720では、MRI FOVの内部で対象のMR画像が取り込まれる。対象のMR撮像に続いて、対象がトラバースされてMRIボアを出てPET検出器FOV内部に位置決めされるように対象テーブルを引っ込ませている。ステップ730においてPET視野域の内部に対象を受け容れた後、ステップ740においてPET検出器と対象の間にPET撮像のための最適クリアランスが提供されるようにPET検出器は撮像位置まで後退して戻される。具体的な一実施形態では、検出器素子を後退させることにより少なくとも1つの検出器素子によって画定されるアパーチャは、最適なクリアランスを提供するように制御される。引き続いてステップ750において、PETイメージャFOV内部で対象のPET画像が取り込まれる。一実施形態ではその対象は、PET検出器素子の拡張及び後退に伴ってMRI−PET複合型イメージャを通ってタンデムでトラバースされる。さらにこの2つの画像は信号処理方法を用いて合成される。上述のステップは好ましい任意の順序で実行することができる、例えば対象のPET撮像を対象のMR撮像より前に実行することがあることに留意すべきである。MR撮像とPET撮像を約数秒〜約数分の時間差内で実行することが可能であるため、このMRI−PET複合撮像はほぼ同時と見なせる。
【0041】
上に記載した方法の各ステップは、そのMRIボアが指定の寸法をもつ対象だけをその内部に収容するように構成されている専用MRI−PETイメージャを用いて対象の専用撮像を実行する方法に適応させ得ることに留意すべきである。換言するとMRIボアは、ある対象のみまたは人間や動物の頭部など対象の一部のみを収容するようなサイズとしている。同様にPET検出器システムは、対象をMRIボア内に前進させて、拡張または変位位置にあるときだけにPET検出器が対象に対するクリアランスを提供できるように構成されている。例えばPET検出器は、患者の肩部に関して拡張位置または変位位置にある場合にのみクリアランスを提供し、これにより患者の頭部をMRI FOV内部に位置決め可能とすることができる。
【0042】
図8〜11は、一実施形態による様々な動作段階におけるMRI−PET撮像システム100(図1)の断面を表した概要図である。図8に示したPET検出器システム130は、図3〜6に示した向きのうちのいずれに従っても構成し得ることに留意すべきである。対象(例えば、患者141)を矢印805の方向に沿ってMRI−PET複合型イメージャの方向に前進させると、PET検出器システム130は方向(X、Y及びZ)のいずれかに沿って患者から半径方向の外方に拡張される。例えば、PET検出器システム130が2つのセグメントを有するセグメント分割型リング検出器として構成されていると仮定すると、この2つのセグメントの各々は(X,−X)、(Y,−Y)または(Z,−Z)方向のうちの1つに沿って拡張されることがある。図9に示したようにPET検出器システム130は、矢印905の方向に沿って患者頭部145をさらにPET検出器130を通過してMRIボア120まで前進させられるように患者の肩部に対するクリアランス139を提供することができる。患者頭部145のMR画像を取り込んだ後、患者は図10に示したような矢印1105の方向に沿ってMRIボア120から出るように動かされ、これにより患者頭部145がPET FOVの内部に位置決めされる。目下のところ拡張位置にあるPET検出器セグメントは、図11に示したように患者頭部145の方向で撮像位置まで後退して戻される。撮像位置までのPET検出器システム130の後退によりさらに、患者の脳に関する最適なPET画像を取得するためのPET検出器システム130と患者頭部145の間の必要な最小のクリアランスを提供できることに留意すべきである。
【0043】
図12〜13は、そのPET検出器システム130が4つのセグメント136を有する検出器リングとして構成させたMRI−PET複合型イメージャ100(図1)の斜視図を表している。PET検出器システム130は、図12に示したようなオープン位置と図13に示したようなクローズ位置の間で拡張及び後退する。
【0044】
図14〜15は、PET検出器システム130が図14に示したようなオープン位置と図15に示したようなクローズの撮像位置との間で主軸の周りで矢印1140、1150の方向に沿って円周性に摺動するように構成されているMRI−PET複合型イメージャ100(図1)の斜視図を表している。動作時においてPET検出器システム130は、対象145をMRIボア120内までトラバースできるようなクリアランスを提供するためにオープン位置に位置決めされることがある。対象145のMR撮像実行に続いて、図15に示した撮像位置まで摺動したPET検出器システム130向けのクリアランスを提供するために対象145がMRIボア120から引き出される。対象145はさらに、PET検出器システム130の方向に前進させ、PET FOVの内部に位置決めされている。引き続いて、対象145のPET撮像が実行される。PET検出器システム130は、ステップの順序を対応して変更すればデフォルト位置としてオープン/拡張位置(図14)とクローズ/撮像位置(図15)のいずれを有することもあり得ることに留意すべきである。例えば、PET検出器システム130のデフォルト位置が図15に示したクローズの撮像位置であるケースでは、対象145のPET撮像が実行され、その後で対象145がPET検出器のFOVから引き出され、これに続いてPET検出器システム130が図14に示したようなオープン位置まで摺動されると共に対象145がMRI撮像のためにMRIボア120内まで動かされる。
【0045】
図16は、一実施形態によるMRI−PET複合型イメージャを製造する例示的な一方法1600に関する各ステップを表した流れ図である。方法1600はステップ1610において、対象のMR画像を取り込むようにMRIイメージャボアを構成するステップを含む。一実施形態ではそのMRIボアは、RFアンテナなどのMRI検出器素子と対象の間に最適なクリアランスを提供できるようなサイズ設定としている。例えば、高品質のMR及びPET画像を得るための対象と頭部の間の最適なクリアランスは円周で約10〜約15cmの範囲である。MRIボアのこうした構成によれば、アーチファクトを低減させた正確かつ高品質の画像の取り込みが可能となる。指定の寸法に合わせたMRIボアサイズのカスタマイズによれば、寸法が同じまたはより小さい対象のMR撮像が可能となること(MRIイメージャの検出器素子が対象の周りで検出器素子により画定される円周を変更できるように調節可能でない場合)が了解されよう。例えばMRIボアは、平均的な人の頭部を収容するような計測値が約40〜約60cmの円周であるようなサイズとすることがある。このMRIボアは人の頭部に合わせてカスタマイズされているため、頭部とボアの間のクリアランスは高分解能の画像の取得を可能とさせるように最適となっている。これに対して、そのMRI画像ボアが160cmのボア円周によって人の体部を収容できるようなサイズとなっていれば、頭部のMR撮像は頭部とボア円周の間のクリアランスが大きく最適に至らないことがある。ステップ1620ではMRIボアの外部にPET検出器システム130が配置されており、この際にPET検出器システムはボアに対する外部に後退可能に配列された1つまたは複数の検出器素子を含む。一実施形態ではそのMRI−PETイメージャは、指定の対象(例えば、脳撮像では人の頭部)に対する複合撮像を実行するように専用である。
【0046】
さらにPET検出器システムは、図3〜6に示した例示的な向きのうちのいずれかに従って構成される。例えばPET検出器システムは、図5に示したようなセグメント分割型リングとして構成されることがある。この構成では、PET検出器システムの4つのセグメントをオープン/拡張位置からクローズ/撮像位置まで主軸の周りで半径方向で拡張及び後退するように構成させることがある。PET検出器は、適当な任意の締結機構によってMRIボアの端部のうちの1つの位置でMRIイメージャの体部に結合させている。この締結機構は、機械的フランジ、クランプ、ボルト、軸受け、電磁石、あるいはMRIイメージャに対してPET検出器をしっかりと保持できる別の任意の固定具として実現することができる。
【0047】
PET検出器システムは、フランジ/グルーブ機構、ガイドレール、その他によって、アキシャル方向、トランスアキシャル方向及び円周方向のうちの1つまたは幾つかの方向で移動式となるように構成されている。PET検出器システムの動きは、モータ、ギア及びピニオン、スプリング装填、その他などの適当な任意の電気的及び機械的手段によって制御される。一実施形態ではそのPET検出器システムの動きは、対象テーブルの動きと連携させている。機械的と電気的のいずれかの搬送手段を用いることにより、対象テーブルの動きによってPET検出器の動きが制御される、あるいはこの逆に制御される。例えばPET検出器システムの方向に対象テーブルを前進させるとき、運動センサその他によって対象テーブルの動きが検知されると共に、オープン位置と撮像位置の間のPET検出器システムの動きを始動させるための対応するトリガ信号が提供される。PET検出器システムの拡張/後退の速さは対象テーブルの前進/引き揚げの速さと比例させることがある。さらに、手動による対象テーブルの動きがPET検出器システムの動きの操作に十分な力に変換される場合、PET検出器システム及び対象テーブルの動きを純粋に機械式とさせることも想定されよう。PET検出器システムはさらに、スプリング装填その他によって元の位置まで後退することがある。
【0048】
またさらには、本発明に関する上述の例示的特徴やその他の例示的特徴はいずれも、装置、方法、システム、コンピュータプログラム及びコンピュータプログラム成果物の形態で具現化されることがあり得る。例えば上述の方法は、添付の図面に示した方法を実行するための構造のいずれか(ただし、これに限らない)を含むシステムまたはデバイスの形態で具現化されることがあり得る。
【0049】
本発明のある種の特徴についてのみ本明細書において図示し説明してきたが、当業者によって多くの修正や変更がなされるであろう。したがって添付の特許請求の範囲が、本発明の真の精神の範囲に属するこうした修正や変更のすべてを包含させるように意図したものであることを理解されたい。
【符号の説明】
【0050】
100 MRI−PET複合型イメージャ
110 MRIイメージャ
120 MRIボア
121 撮像スペース
125 PETイメージャ
130 PET検出器
131 矢印
132 矢印
134 セグメント
135 PET検出器素子
136 セグメント
137 セグメント
138 矢印
139 クリアランス
140 対象テーブル
141 患者
142 主軸
145 対象
150 RFコイル
160 磁場コイル
164 MR画像信号
165 MRI回路ユニット
166 MR画像
170 MRI−PET画像プロセッサ
172 ディスプレイ
174 PET画像信号
175 PET回路ユニット
176 PET画像
180 PET検出器素子駆動ユニット
184 MR−PET画像
185 制御器
186 制御信号
187 PET駆動制御信号
188 対象テーブル駆動制御信号
190 対象テーブル駆動ユニット
200 MRI−PET撮像システム
700 MRI−PET複合撮像を実行する方法
710 方法ステップ
720 方法ステップ
730 方法ステップ
740 方法ステップ
750 方法ステップ
805 方向矢印
905 方向矢印
1105 方向矢印
1140 方向矢印
1150 方向矢印
1600 MRI−PET複合型イメージャを製造する方法
1610 方法ステップ
1620 方法ステップ
【技術分野】
【0001】
本開示は全般的には磁気共鳴撮像(MRI)及び陽電子放出断層(PET)のテクノロジーに関する。より具体的には本開示は、PETとMRIのテクノロジーをPETとMRIのほぼ同時撮像が可能な複合型スキャナに統合させるシステム及び方法に関する。
【背景技術】
【0002】
外傷性脳損傷、アルツハイマー病、パーキンソン病、てんかん及び別の形態の神経障害のための撮像に対する関心が高まりつつあり、脳及び神経研究において磁気共鳴撮像(MRI)と陽電子放出断層(PET)の複合テクノロジーが大幅な躍進を示している。生理学的及びメタボリックの状態評価におけるMRIのずば抜けた軟部組織コントラスト及び高特定性とPETの優れた感度とが一緒になると、診断のための形態学情報、機能情報及びメタボリック情報の精細な組み合わせを提供することができる。幾つかのMRI−PET複合型撮像技法が提唱されてきた。
【0003】
一手法では、2つの別々のスキャナによってMRI及びPET撮像を実行し、後で診断のために画像融合方法によってこの2つの画像情報を合成するようにしている。アファイン変換及び変形可能(deformable)変換を利用した高度な画像融合のための幾つかの手法が開発されているが、別々のスキャナで順次収集した撮像データの正確な空間的相関は幾つかの理由のために限界がある。例えば、患者の再位置決めによって、セクション向きの相違並びに臓器の形状及び位置の変動が生じる。さらに最新式の位置調整アルゴリズムは、すべての変形を正確に位置調整することが不可能であり、また臨床医が融合画像を読影する際の信頼度が損なわれることがある。
【0004】
患者の再位置決めを行うことなく単一の検査で形態学データと機能データの時間的及び空間的な相互位置調整を可能とさせる混成システムによれば、改良型のデータ整列を達成させることができる。こうした混成システムは、第1のシステムタイプにおいて第1のスキャナと第2のスキャナが搬送レールを通じて互いに接続されるようにして開発されている。搬送レール上に検査対象物の保持が可能なテーブルが設けられており、これによりPET画像とMRI画像が順次取得される。しかしこうしたシステムには幾つかの欠点がある:例えば、対象搬送レールが占有するスペースが大きいこと、また搬送レールを通じて対象を第1のスキャナから第2のスキャナまで搬送する際にかなりの時間が費やされること、などである。
【0005】
混成式MRI−PETシステムの別の構成では、2つのモダリティのうちより小さい方であるのが一般的であるPETスキャナがMRIボアの内部に配置される。こうした配列では、PETスキャナがMRIの典型的には高い磁場環境に曝されており、この2つのシステムの間に電磁気干渉(EMI)の形態の干渉または相互作用が生じ、これによりその性能に悪影響が生じる。さらにRFコイルのようなMRIデータ収集ハードウェアはPET信号を減衰させ、さらにPET性能を低下させることになる。上述の幾何学構成でMR/PETの同時撮像を可能にさせる得るが、MRIイメージャもまたその視野域内にPET検出器が存在しているため脳撮像について最適に至らずMRデータ収集システムの効率が低下する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願第20100217112号
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、所与の対象物についてMRI−PETのほぼ同時撮像を実行すること並びに上述の欠点に対処することを専らとする一体型PET−MRIシステムに対する必要性が存在する。
【課題を解決するための手段】
【0008】
一態様では、脳などの対象に対する撮像を実行するための専用磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャを提供する。この専用MRI−PETイメージャは、対象のMR撮像を実行するように構成されたMRIボアを含む。本MRI−PET複合型イメージャはさらに、対象からのPET放出を検出するようにMRIボアの外部に配置させたPET検出器システムを含む。PET検出器システムは、MRIボアの外部で後退(retract)可能に配列させた少なくとも1つの検出器素子を含む。
【0009】
別の態様では、対象の撮像を実行するための複合型磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャを提供する。本MRI−PET複合型イメージャは、対象のMR撮像を専ら実行するように構成されたMRIボアを含む。このMRIボアは、MRIボアとMRIボア内部の対象の間に最適なクリアランスを提供できるようなサイズ設定としている。本専用MRI−PETイメージャはさらに、対象からのPET放出を検出するようにMRIボアの外部に配置させたPET検出器システムを含む。このPET検出器システムは、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子を含む。
【0010】
さらに別の態様では、MRI−PET複合型イメージャを製造する方法を提供する。本方法は、MRIボア内部に位置決めされた対象のMR画像を取り込むようにMRIボアを構成するステップを含む。本方法はさらに、対象からのPET放出を検出するようにMRIボアの外部に、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子を含むPET検出器を配置させるステップを含む。
【0011】
また別の態様では、MRI−PET複合型イメージャにおいて対象のMRI−PET複合撮像を実行する方法を提供する。本方法は、MRI視野域(FOV)内に対象をトラバースさせるためのクリアランスを提供するためにPET検出器の検出器素子を後退させるステップを含む。MRI FOV内に位置決めされた対象のMR画像が取り込まれる。本方法はさらに、PET検出器FOVの内部に対象を受け容れるステップと、PET検出器と対象の間に最適なクリアランスが提供されるようにPET検出器素子を再位置決めするステップと、を含む。引き続いて、PET検出器FOVの内部で対象のPET画像が取り込まれる。
【0012】
本システム及び方法に関するこれらの特徴、態様及び利点、並びにその他の特徴、態様及び利点については、同じ参照符号が図面全体を通じて同じ部分を表している添付の図面を参照しながら以下の詳細な説明を読むことによってより理解が深まるであろう。
【図面の簡単な説明】
【0013】
【図1】MRI−PET撮像システムの例示的な一実施形態を表した概要図である。
【図2】一実施形態による例示的なMRI−PET撮像システム構成を表したブロック図である。
【図3】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図4】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図5】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図6】一実施形態によるPET検出器システムの一構成を表した概要図である。
【図7】一実施形態によるMRI−PET複合撮像を実行する例示的な一方法に関する各ステップを表した流れ図である。
【図8】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
【図9】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
【図10】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
【図11】一実施形態によるある動作段階におけるMRI−PET撮像システムの断面像を表した概要図である。
【図12】一実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
【図13】一実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
【図14】別の実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
【図15】別の実施形態によるある動作段階におけるMRI−PET撮像システムの斜視像を表したブロック図である。
【図16】一実施形態によるMRI−PET複合型イメージャを製造する例示的な一方法に関する各ステップを表した流れ図である。
【発明を実施するための形態】
【0014】
詳細には以下に記載するが、本システムの実施形態によれば対象の撮像を実行するための複合型の磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャ並びにその方法が提供される。一実施形態では、関心対象に対するMRとPETの両方の専用撮像を最適化するようなシステム幾何学構成について記載している。提唱したMRI−PETイメージャは、関心対象に関するPET画像とMR画像をほぼ同時に取得する。
【0015】
図1は、陽電子放出断層(PET)−磁気共鳴撮像(MRI)複合型撮像システム100に関する例示的な一実施形態を表した概要図である。MRI−PET複合型撮像システム100は、対象(図示せず)のMR画像を取り込むためのMRIボア120を有するMRIイメージャ110と、MRIボア120の外部に据え付けられたPET検出器システム130を含んだPETイメージャ125と、対象をPET検出器システム及びMRIボア120内に搬送するための対象テーブル140と、を含む。対象の一例には、生理学状態やメタボリック状態を評価する際にMRIの軟部組織コントラスト及び高い特定性とPETの感度とを併せて得ることが有益であるような人間や動物並びにその他の対象(ただし、これらに限らない)を含む。MRIボア120は、MRI撮像スペース121がMRIボア120の中心を通過するように形成されると共に対象が対象テーブル140上にある間に対象をMRI撮像スペース121内まで移動できるように対象テーブル140が装着されるようにして構成されている。対象テーブル140は、対象を撮像スペース内にまたこれから出るように搬送できるように摺動可能に形成させることがある。
【0016】
MRIイメージャ110は、中空円筒状の幾何学構成を有する主マグネット(図示せず)を含む。この主マグネットは、MRI−PET複合型イメージャ100内における最大かつ最外側の構成要素となっている。この主マグネットは、永久磁石、常伝導電磁石及び超伝導電磁石(ただし、これらに限らない)を含むことがある。この主マグネットは、対象のMR撮像の間に強力で均一な磁場B0を発生させる。MR画像は典型的には、MRI撮像スペース121(明細書の以下においてMR視野域(FOV)と呼ぶ)の中央領域内において(中央領域内部では磁場の均一性が強いため)主マグネットの主軸142に沿って収集される。
【0017】
PET検出器システム130は、対象から放出された同時消滅光子を検出するための1つまたは複数の検出器素子を含む。動作時においてこの検出器素子は、対象から検出器素子の方向に放出された同時消滅光子を検出できるように対象の周りに配列させると共に少なくともそれだけのサイズを有するように構成されている。図示した実施形態ではPET検出器システム130は、MRIボア120との整列を容易にするために円形の幾何学構成を有するように構築させている。具体的にはPET検出器システム130は、MR主マグネットの主軸142に概ね沿うようにMR主マグネットのボア120の近傍に配置させている。一例ではそのPET検出器システムは、ボア120の外部に配置させており、システムの不可分の一部とすること、拡張用構成要素とすること、あるいは必要に応じて配備可能な分離可能構成要素とすることが可能である。
【0018】
図2は、一実施形態によるMRI−PET複合撮像システム200の構成を表したブロック図である。図示したようにMRIイメージャ110は、HF励起パルスを発生させかつ放出される共鳴信号を検出するために、磁場コイル組160から形成された主磁場マグネットと、無線周波数(RF)コイル組150から形成された高周波数の無線波システムと、を含む。
【0019】
無線周波数(RF)コイル組150(MRアンテナと呼ぶこともある)は一般に、磁場コイル160が発生させる磁場B0の中央領域内に配置させている。これらのRFコイル150は、少なくとも2つの機能(具体的には、MR撮像過程の間にRF信号を送信し対象からRF信号を受信するための機能)を有することがある。RF信号の送信の間ではRFコイル150は典型的には、ラーモアのスピン周波数で振動するRFパルスを発生させており、このパルスによって、撮像しようとする対象内の原子核が励起される。RF信号の受信の間ではRFコイル150は、その元の状態までの「緩和(relaxation)」の間に同じ原子核が放出する信号を同じ周波数で検出している。撮像対象が磁場B0の中央領域121に来るようにRFコイル150によって取り囲まれたボアの内部に撮像対象を配置させることに留意されたい。
【0020】
MRIイメージャ110により取り込まれかつ取得された画像信号164はMRIユニット165に送られ、さらに画像とするように変換を受ける。この画像はMRI−PET複合画像プロセッサ170に送られており、ここでMR画像166はPET検出器が検出したPET画像176とで合成またはマッピングを受けることがある。このMR/PETの画像184はディスプレイ172上に表示させることがある。
【0021】
PET検出器システム130は1つまたは複数の検出器素子135を含む。検出器素子135の配列に関しては様々な構成が存在している。一実施形態ではその検出器素子135を、対象を囲繞するリングの形態で配列させることがある。こうしたPET撮像システムのことはまた、静止ブロックリングシステムと呼ぶことがある。別の実施形態ではそのPETイメージャ125はまた、例えば2つ、4つまたは6つのフラット検出器を含むことがある。さらに、PET検出器システム130のトランスアキシャル方向とアキシャル方向の両方の視野域(FOV)をMRIボア120の外部に延ばすことが可能である。
【0022】
アキシャル方向で主軸142に沿ってPET検出器130をステップ状に変位させることによって、多くのPET断層像に関するデータを時間的に連続して収集するのが一般的である。面積が大きい位置検知性の検出器素子を多角形配列でより少ない数だけ用いることも可能である。さらに、検出器素子によって部分的にのみ構成されたリング形状の検出器を用いることが可能である。このリング検出器の例では、必要な計測データを収集するために対象の周りで検出器素子135を回転させている。こうしたPET撮像システムのことをまた、回転ブロックリングシステムと呼ぶことがある。
【0023】
PET検出器素子135は典型的には、アレイ状に配列させかつフォトセンサに結合させたシンチレーション結晶から形成されている。本明細書には一例によるPETイメージャ125が実行する信号処理について記載している。このシンチレーション結晶は、対象から放出された消滅光子を停止させると共にこれらを光シンチレーションパルスに変換している。PET検出器素子135内でシンチレーション結晶が発生させたシンチレーションパルスは、フォトセンサ(図示せず)に送られ、またさらに電荷信号になるように変換される。具体的な一実施形態ではそのフォトセンサは光電子増倍管である。別の実施形態ではそのフォトセンサは、アバランシェフォトダイオード(APD)や半導体光電子増倍器(SSPM)などの半導体フォトセンサである。フォトセンサから出力された電荷信号はPETユニット175内部の信号増幅回路に送られる。信号増幅回路を通過する間にファイン電荷信号は増幅され、さらにこの増幅済み信号はPETユニット175を通過する間にエンコード/デコードを受けてエネルギー、相互作用時間及び位置の情報になる。PET放出からの検出信号は、断層画像再構成と呼ぶ処理を通じて機能情報を備えた画像となるように変換される。再構成画像174は、MRI−PET複合画像プロセッサ170に送られ、さらに単一画像とするように画像プロセッサ170によって合成される。したがって、解剖画像と機能画像をその中で合成させた合成画像が得られる。さらに、複合画像プロセッサ170はそれぞれの画像を選択的に合成して単一画像とすることや、単一画像をそれぞれの画像にするように分離させることができる。処理済みのMR/PET画像はさらに、不揮発性や揮発性の記憶媒体(図示せず)内に保存されることがある。
【0024】
図2には詳細に図示していないがMRIイメージャ110はさらに、主磁場B0に対するx、y及びz方向の磁場傾斜を発生させる傾斜コイルの組を含む。この磁場傾斜は、対象をその内部に配置させるスペース内における距離情報をエンコードするために用いられる。PETイメージャ125はさらに、電子回路(例えば、付属の前置増幅器)やその他の金属構成要素(例えば、遮蔽用のエンクロージャ)を含む。
【0025】
図2は、一実施形態による構成要素間の空間的関係を表した一体型PET−MRIイメージャの斜視図を示している。この例の構成要素は一般に、主マグネット160の主軸142を基準として同心円状にあるいはほぼ同心円状に構築されることに留意されたい。こうした方式で配列させた構成要素を有することが望ましいが、1つまたは複数の構成要素をわずかに軸外れとさせることもある。
【0026】
例示的な一実施形態ではそのPET検出器素子135は、MRIボア120の軸142の周りでトランスアキシャル方向に移動可能となるように構成されている。本明細書で用いる場合に「トランスアキシャル方向」という用語は検出器素子がその上に締結される円形の周縁部に沿った方向を意味している。別の実施形態ではそのMRアンテナ150は、MRIボア120の内部でこれがアキシャル方向142に並進するように据え付けられることがある。本明細書で用いる場合に「アキシャル方向」という用語は、主MRマグネットの軸142でもある対象テーブルをそれに沿って配列させる軸に沿った方向を意味している。
【0027】
トランスアキシャル方向におけるPET検出器システム130の変位並びに対象の周りの回転(必要な場合)は、例示的な一実施形態に従ってPET検出器素子駆動ユニット180の支援を得て実行される。PET検出器素子駆動ユニット180は、流体作動方式(fluid hydraulics)または圧縮空気作動方式(compressed air hydraulics)を利用することがあり、また制御器185から受け取った制御信号に従って動作している。具体的な一実施形態ではそのMRアンテナ150及びPET検出器システム130は、共通の駆動ユニット180を有することや、別々の駆動ユニットを有することがあり得る。この共通駆動ユニットや別々の駆動ユニットは、MRアンテナ150とPET検出器システム130に関するアキシャル方向とトランスアキシャル方向のそれぞれの方向での独立した動きを可能にしている。制御器185は、MRI−PET画像プロセッサ170から受け取ったMRI、PET画像データ184に少なくとも部分的に基づいた制御信号186を提供する。PET検出器システム130の動きを制御するための駆動制御信号187は、ボーデン(Bowden)ケーブル、プッシュロッド、歯付ベルトあるいは機械的または電子的な別の任意の手段の支援を得て駆動ユニット180からPET検出器システム130まで伝えられることがある。
【0028】
別の態様ではそのMRI−PET複合システム200はさらに、対象テーブル140向けの駆動ユニット190を含むことがある。ここでも対象テーブル駆動ユニット190は、制御器185から受け取った制御信号186に従って動作する。対象テーブルの動きを制御するための駆動制御信号188は対象テーブル駆動ユニット190によって提供される。PET検出器素子駆動ユニット180と対象テーブル駆動ユニット190は、PET検出器システム130及び対象テーブル140の運動または位置を検知するための適当な位置センサまたは運動センサ(図示せず)と結合させることがある。制御器185は受け取ったセンサ信号に基づいて、対象テーブル140の動きをPET検出器システム130の素子の動きと同期させるように駆動ユニット180、190に指令する。例えばPET検出器システム130の素子は、MRIボア120の方向に前進している対象テーブル140とタンデムで撮像位置からオープン位置まで拡張するように構成させることがある。同様にPET検出器システム130の素子は、MRIボア120から離れるように引っ込ませている対象テーブル140とタンデムで撮像位置までオープン位置から戻るように後退するように構成されることがある。本明細書で用いる場合にPET検出器システム130は一例において、少なくとも2つの別個の位置(すなわち、撮像位置とオープン位置)で動作する。オープン位置とは、MRIボア開口部からのPET検出器の除去を意味しており、これによりMRIイメージャ120への進入が得られるようなテーブル140上の対象の容易な進入が可能となる。このオープン位置とは、PET検出器素子135の後退とすることも、PET検出器システム130の除去とすることもあり得る。PET検出器システム130に関する撮像位置とは、PET検出器について撮像を可能とさせる位置を意味している。
【0029】
別の実施形態ではそのMRI−PET複合型イメージャ200は、対象の専用撮像を実行するように適応させている。提唱した専用MRI−PETイメージャ200は、PET検出器システム130がMRIイメージャ110のボア120の直ぐ外側あるいはその近傍に位置決めされるように構成されている。専用MRI−PETイメージャのMRIボア120は一例では、関心対象の寸法、こうした寸法の標準的な範囲あるいは事前指定の寸法に従って選択された寸法に対応したサイズ設定としている。一例として、対象の第2のセクションが対象の第1のセクションと比べてより大きなボリュームを有するような寸法の異なる少なくとも2つのセクションを対象が有するものと仮定すると、その関心対象が対象の第1のセクションであることがある。関心対象の専用撮像を実行するために、製造の時点でそのMRIボアを、関心対象とボア120の周縁部の間に必要な最小のクリアランスを提供できるようなサイズ設定としている。一実施形態では要求される最小の間隔は、約10cmと約15cmの間とすることがある。MRIボアのサイズ設定は、ボアを画定するRFコイル及び傾斜コイルのサイズ設定を意味することに留意すべきである。
【0030】
さらにPET検出器130は、PET検出器を用いた撮像を実行するように動作させたときにPET撮像用のスペースを有し得るようなサイズ設定としている。PET検出器システム130のサイズ設定とは、PET検出器システム130の検出器素子135を対象の周りで要求される撮像に適した距離に分布させることを意味する。さらに一例としてPET検出器システム130は、MRIボア120内まで並進させ得るような対象に対するクリアランスを提供できるように対象から半径方向またはトランスアキシャル方向で外方に動的に拡張するように構成されている。本明細書で用いる場合に「動的に(dynamically)」という用語は所与の任意の時点で実行される動作によって特徴付けされる。さらに本明細書で使用する場合に、PET検出器の中心から検出器素子がその上に締結される周縁部への方向が半径方向である。
【0031】
一例では、MRIボア120内部における対象のMR撮像に続いて、対象の第1のセクションをMRIボア120から出しPET撮像スペース内に移動させており、これにより第2のセクションはPET撮像スペースから出るように移動する。PET検出器システム130は、対象の第1のセクションのPET撮像のためにその元の撮像/クローズ位置まで後退して戻るように構成されている。MRとPETの撮像のそれぞれのためにMR及びPETイメージャの視野域間で対象を移動させるために対象テーブルを用いることがある。
【0032】
MRI−PETイメージャ200が人の頭部撮像の専用であり、MRIボア120とPET検出器システム130の両方が頭部を収容するのに必要な最小のクリアランスを提供するような寸法に合わせたサイズ設定となっているような一例について考察してみる。MR撮像のために対象テーブル140が患者頭部をMR FOV内まで前進させたとき、PET検出器システム130は患者肩部がつっかえないようにオープン位置まで後退する。PET撮像の間では、患者テーブル140を引き戻して患者頭部がMRI FOVを出てPET FOV内まで移動するように、PET検出器システム130は患者の頭部撮像のために撮像位置まで後退して戻る。セグメント分割のPET検出器システムのケースでは、これらのセグメントは密着したボア(最適なPET撮像を可能にするための継ぎ目がない(または、継ぎ目が小さい)検出器の場合など)が形成されるように縮まる。本明細書に記載した専用MRI−PETイメージャによれば、最適な高感度で高分解能のPET撮像が提供される。別の実施形態では、PET検出器が取外し可能であり、MRI撮像の実行の際に除去されかつPET撮像の実行の際に再配置される。
【0033】
少なくとも1つの実施形態のMRI−PET複合型イメージャは、主マグネットの主軸142を中心として半径方向に、直線的にあるいは円周方向に変位または拡張し得るPET検出器システム130を含む。PET検出器システム130がこうした移動式構成であるため、PET検出器システム130のトランスアキシャル方向の視野域(FOV)を動的に変更することが可能となる。対象の専用撮像を実行するための具体的な一実施形態では、PET検出器システム130は、対象の指定の区画に対してクリアランスを提供するため並びにPET FOVを動的に調整するために拡張及び後退するように構成されている。
【0034】
PET検出器システム130は、図3〜6に示したような幾つかの異なる構成を有することがある。例えば図3に示したようにPET検出器素子135は、対象(図示せず)を囲繞する1つまたは複数のPET検出器素子135で占有された検出器リング130として構成されている。PET検出器システム130は検出器素子135により完全に占有させることも部分的に占有させることもあり、その検出器リング上における検出器素子の数及び分布は対象の1層または複数層のPET画像作成に要する計測データの収集が検出器システム130を回転させてまたは回転させないで可能となるように選択される。ある向きでは、その検出器リング130をMRIイメージャ及びMRIボアと摺動可能に結合させている。図示のように検出器リング130は、(X、Y、Z方向に沿って)直線的に摺動すること(矢印132で示す)や、主マグネットの主軸の周りに円周方向に摺動すること(矢印131で示す)があり得る。ある配列ではその検出器リング130は、モータやギアアセンブリなどの電気機械的手段によって直線または半径方向摺動ガイドに沿って摺動するように構成されることがある。別の配列ではその検出器リング130は、空動式または油圧式のアクチュエータなどの機械的手段によって直線摺動ガイドに沿って摺動するように構成されることがある。さらに検出器リング130は、摺動子間に摺動子上にピボット点を有する剛性のリンクを用いること、摺動子をベルト、チェーンまたはガイドで接合させること、並びに摺動子をギアを用いて機械的に接合させることなど幾つかの結合用手段によって対象テーブルの動きに伴ってタンデムで摺動するように構成されることがある。
【0035】
検出器素子により部分的にのみ占有されているPET検出器システム130のケースでは、対応するアキシャル方向視野域の第1の完全なPET画像に関する計測データが収集され終わるまで検出器リング130を対象の周りで回転させている。引き続いて対象テーブル140は、対象をアキシャル方向(すなわち対象が支持されている方向)で摺動可能に搬送させることがあり、対象は検出器素子がその上に配列された周縁部に対して垂直に進む。対象をその次のアキシャル方向視野域まで搬送した後、PET検出器システム130の回転によって次のPET画像を記録することがある。PET検出器システム130は、電気的、電気機械的または機械的な任意の手段によって回転させることがある。こうした様々な変位及び回転ステップの間に多数のPET断層像が連続的に収集されており、これによって全体の計測時間が短縮される。
【0036】
PET検出器システム130はまた、図4〜5に示したように2つ以上のセグメント(具体的に図4ではセグメント134また図5ではセグメント136)に分割させることがある。PET検出器システム130のこのセグメント134及び136は、主マグネット(図示せず)の主軸の周りで半径方向に拡張するまたは縮むように構成されている。
【0037】
図6に示した別の例示的な向きではPET検出器システム130は、対象の相対する側で互いに平行に配列されると共に、矢印138の方向に拡張できるか完全なデータ収集のために対象(図示せず)の周りでトランスアキシャル方向に回転できるような2つの別々の検出器プレート137として構成されることがある。さらに別の実施形態ではそのPET検出器システム130は、完全な多角形配列で対象を囲繞するために3つ以上の検出器プレート(検出器プレートの数は偶数の事も奇数のこともある)を含むことがある。通常、こうしたPET検出器プレートのことを連続式検出器パネルと呼んでいる。
【0038】
上述のように構築したMRI−PET複合型イメージャを動作させる方法について、図7に示した流れ図700を参照しながら以下で説明することにする。
【0039】
大まかに言えばMRI−PET複合型イメージャにおける対象の撮像のためには、その撮像対象は対象テーブル上に配置されると共に、MRとPETのそれぞれの撮像のためにMRとPETイメージャの視野域間で移動させている。引き続いて作成済みの画像がプロセッサによって重ね合わせられ、これによりMRIの高空間分解能とPETからの機能情報とが組み合わせられる。
【0040】
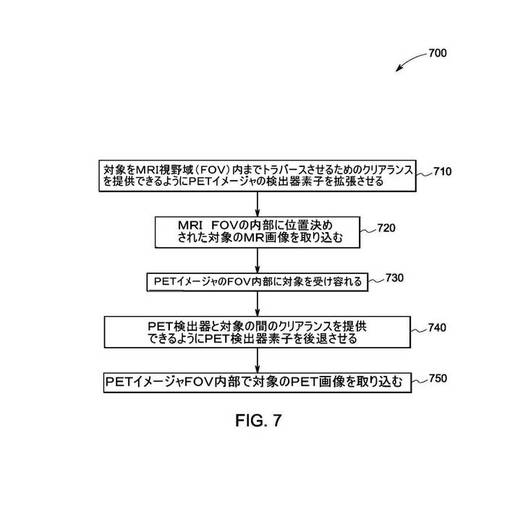
より詳細には、一実施形態による方法700は、放射性医薬品などのトラッキング用薬剤を注入または吸入により導入することによって対象のPET撮像を準備することを含む。対象は、MRI及びPETのFOV内部に対象が配置されるように対象テーブル上に位置決めされる。対象テーブルをPET検出器システムの方向に前進させるとき、ステップ710においてPET検出器は、対象をMRI FOV内までトラバースさせるためのクリアランスを提供できるように撮像位置からオープン位置まで拡張されまたは排除される。さらにステップ720では、MRI FOVの内部で対象のMR画像が取り込まれる。対象のMR撮像に続いて、対象がトラバースされてMRIボアを出てPET検出器FOV内部に位置決めされるように対象テーブルを引っ込ませている。ステップ730においてPET視野域の内部に対象を受け容れた後、ステップ740においてPET検出器と対象の間にPET撮像のための最適クリアランスが提供されるようにPET検出器は撮像位置まで後退して戻される。具体的な一実施形態では、検出器素子を後退させることにより少なくとも1つの検出器素子によって画定されるアパーチャは、最適なクリアランスを提供するように制御される。引き続いてステップ750において、PETイメージャFOV内部で対象のPET画像が取り込まれる。一実施形態ではその対象は、PET検出器素子の拡張及び後退に伴ってMRI−PET複合型イメージャを通ってタンデムでトラバースされる。さらにこの2つの画像は信号処理方法を用いて合成される。上述のステップは好ましい任意の順序で実行することができる、例えば対象のPET撮像を対象のMR撮像より前に実行することがあることに留意すべきである。MR撮像とPET撮像を約数秒〜約数分の時間差内で実行することが可能であるため、このMRI−PET複合撮像はほぼ同時と見なせる。
【0041】
上に記載した方法の各ステップは、そのMRIボアが指定の寸法をもつ対象だけをその内部に収容するように構成されている専用MRI−PETイメージャを用いて対象の専用撮像を実行する方法に適応させ得ることに留意すべきである。換言するとMRIボアは、ある対象のみまたは人間や動物の頭部など対象の一部のみを収容するようなサイズとしている。同様にPET検出器システムは、対象をMRIボア内に前進させて、拡張または変位位置にあるときだけにPET検出器が対象に対するクリアランスを提供できるように構成されている。例えばPET検出器は、患者の肩部に関して拡張位置または変位位置にある場合にのみクリアランスを提供し、これにより患者の頭部をMRI FOV内部に位置決め可能とすることができる。
【0042】
図8〜11は、一実施形態による様々な動作段階におけるMRI−PET撮像システム100(図1)の断面を表した概要図である。図8に示したPET検出器システム130は、図3〜6に示した向きのうちのいずれに従っても構成し得ることに留意すべきである。対象(例えば、患者141)を矢印805の方向に沿ってMRI−PET複合型イメージャの方向に前進させると、PET検出器システム130は方向(X、Y及びZ)のいずれかに沿って患者から半径方向の外方に拡張される。例えば、PET検出器システム130が2つのセグメントを有するセグメント分割型リング検出器として構成されていると仮定すると、この2つのセグメントの各々は(X,−X)、(Y,−Y)または(Z,−Z)方向のうちの1つに沿って拡張されることがある。図9に示したようにPET検出器システム130は、矢印905の方向に沿って患者頭部145をさらにPET検出器130を通過してMRIボア120まで前進させられるように患者の肩部に対するクリアランス139を提供することができる。患者頭部145のMR画像を取り込んだ後、患者は図10に示したような矢印1105の方向に沿ってMRIボア120から出るように動かされ、これにより患者頭部145がPET FOVの内部に位置決めされる。目下のところ拡張位置にあるPET検出器セグメントは、図11に示したように患者頭部145の方向で撮像位置まで後退して戻される。撮像位置までのPET検出器システム130の後退によりさらに、患者の脳に関する最適なPET画像を取得するためのPET検出器システム130と患者頭部145の間の必要な最小のクリアランスを提供できることに留意すべきである。
【0043】
図12〜13は、そのPET検出器システム130が4つのセグメント136を有する検出器リングとして構成させたMRI−PET複合型イメージャ100(図1)の斜視図を表している。PET検出器システム130は、図12に示したようなオープン位置と図13に示したようなクローズ位置の間で拡張及び後退する。
【0044】
図14〜15は、PET検出器システム130が図14に示したようなオープン位置と図15に示したようなクローズの撮像位置との間で主軸の周りで矢印1140、1150の方向に沿って円周性に摺動するように構成されているMRI−PET複合型イメージャ100(図1)の斜視図を表している。動作時においてPET検出器システム130は、対象145をMRIボア120内までトラバースできるようなクリアランスを提供するためにオープン位置に位置決めされることがある。対象145のMR撮像実行に続いて、図15に示した撮像位置まで摺動したPET検出器システム130向けのクリアランスを提供するために対象145がMRIボア120から引き出される。対象145はさらに、PET検出器システム130の方向に前進させ、PET FOVの内部に位置決めされている。引き続いて、対象145のPET撮像が実行される。PET検出器システム130は、ステップの順序を対応して変更すればデフォルト位置としてオープン/拡張位置(図14)とクローズ/撮像位置(図15)のいずれを有することもあり得ることに留意すべきである。例えば、PET検出器システム130のデフォルト位置が図15に示したクローズの撮像位置であるケースでは、対象145のPET撮像が実行され、その後で対象145がPET検出器のFOVから引き出され、これに続いてPET検出器システム130が図14に示したようなオープン位置まで摺動されると共に対象145がMRI撮像のためにMRIボア120内まで動かされる。
【0045】
図16は、一実施形態によるMRI−PET複合型イメージャを製造する例示的な一方法1600に関する各ステップを表した流れ図である。方法1600はステップ1610において、対象のMR画像を取り込むようにMRIイメージャボアを構成するステップを含む。一実施形態ではそのMRIボアは、RFアンテナなどのMRI検出器素子と対象の間に最適なクリアランスを提供できるようなサイズ設定としている。例えば、高品質のMR及びPET画像を得るための対象と頭部の間の最適なクリアランスは円周で約10〜約15cmの範囲である。MRIボアのこうした構成によれば、アーチファクトを低減させた正確かつ高品質の画像の取り込みが可能となる。指定の寸法に合わせたMRIボアサイズのカスタマイズによれば、寸法が同じまたはより小さい対象のMR撮像が可能となること(MRIイメージャの検出器素子が対象の周りで検出器素子により画定される円周を変更できるように調節可能でない場合)が了解されよう。例えばMRIボアは、平均的な人の頭部を収容するような計測値が約40〜約60cmの円周であるようなサイズとすることがある。このMRIボアは人の頭部に合わせてカスタマイズされているため、頭部とボアの間のクリアランスは高分解能の画像の取得を可能とさせるように最適となっている。これに対して、そのMRI画像ボアが160cmのボア円周によって人の体部を収容できるようなサイズとなっていれば、頭部のMR撮像は頭部とボア円周の間のクリアランスが大きく最適に至らないことがある。ステップ1620ではMRIボアの外部にPET検出器システム130が配置されており、この際にPET検出器システムはボアに対する外部に後退可能に配列された1つまたは複数の検出器素子を含む。一実施形態ではそのMRI−PETイメージャは、指定の対象(例えば、脳撮像では人の頭部)に対する複合撮像を実行するように専用である。
【0046】
さらにPET検出器システムは、図3〜6に示した例示的な向きのうちのいずれかに従って構成される。例えばPET検出器システムは、図5に示したようなセグメント分割型リングとして構成されることがある。この構成では、PET検出器システムの4つのセグメントをオープン/拡張位置からクローズ/撮像位置まで主軸の周りで半径方向で拡張及び後退するように構成させることがある。PET検出器は、適当な任意の締結機構によってMRIボアの端部のうちの1つの位置でMRIイメージャの体部に結合させている。この締結機構は、機械的フランジ、クランプ、ボルト、軸受け、電磁石、あるいはMRIイメージャに対してPET検出器をしっかりと保持できる別の任意の固定具として実現することができる。
【0047】
PET検出器システムは、フランジ/グルーブ機構、ガイドレール、その他によって、アキシャル方向、トランスアキシャル方向及び円周方向のうちの1つまたは幾つかの方向で移動式となるように構成されている。PET検出器システムの動きは、モータ、ギア及びピニオン、スプリング装填、その他などの適当な任意の電気的及び機械的手段によって制御される。一実施形態ではそのPET検出器システムの動きは、対象テーブルの動きと連携させている。機械的と電気的のいずれかの搬送手段を用いることにより、対象テーブルの動きによってPET検出器の動きが制御される、あるいはこの逆に制御される。例えばPET検出器システムの方向に対象テーブルを前進させるとき、運動センサその他によって対象テーブルの動きが検知されると共に、オープン位置と撮像位置の間のPET検出器システムの動きを始動させるための対応するトリガ信号が提供される。PET検出器システムの拡張/後退の速さは対象テーブルの前進/引き揚げの速さと比例させることがある。さらに、手動による対象テーブルの動きがPET検出器システムの動きの操作に十分な力に変換される場合、PET検出器システム及び対象テーブルの動きを純粋に機械式とさせることも想定されよう。PET検出器システムはさらに、スプリング装填その他によって元の位置まで後退することがある。
【0048】
またさらには、本発明に関する上述の例示的特徴やその他の例示的特徴はいずれも、装置、方法、システム、コンピュータプログラム及びコンピュータプログラム成果物の形態で具現化されることがあり得る。例えば上述の方法は、添付の図面に示した方法を実行するための構造のいずれか(ただし、これに限らない)を含むシステムまたはデバイスの形態で具現化されることがあり得る。
【0049】
本発明のある種の特徴についてのみ本明細書において図示し説明してきたが、当業者によって多くの修正や変更がなされるであろう。したがって添付の特許請求の範囲が、本発明の真の精神の範囲に属するこうした修正や変更のすべてを包含させるように意図したものであることを理解されたい。
【符号の説明】
【0050】
100 MRI−PET複合型イメージャ
110 MRIイメージャ
120 MRIボア
121 撮像スペース
125 PETイメージャ
130 PET検出器
131 矢印
132 矢印
134 セグメント
135 PET検出器素子
136 セグメント
137 セグメント
138 矢印
139 クリアランス
140 対象テーブル
141 患者
142 主軸
145 対象
150 RFコイル
160 磁場コイル
164 MR画像信号
165 MRI回路ユニット
166 MR画像
170 MRI−PET画像プロセッサ
172 ディスプレイ
174 PET画像信号
175 PET回路ユニット
176 PET画像
180 PET検出器素子駆動ユニット
184 MR−PET画像
185 制御器
186 制御信号
187 PET駆動制御信号
188 対象テーブル駆動制御信号
190 対象テーブル駆動ユニット
200 MRI−PET撮像システム
700 MRI−PET複合撮像を実行する方法
710 方法ステップ
720 方法ステップ
730 方法ステップ
740 方法ステップ
750 方法ステップ
805 方向矢印
905 方向矢印
1105 方向矢印
1140 方向矢印
1150 方向矢印
1600 MRI−PET複合型イメージャを製造する方法
1610 方法ステップ
1620 方法ステップ
【特許請求の範囲】
【請求項1】
対象の撮像を実行するための磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャ(100)であって、
対象のMR撮像を実行するように構成されたMRIボア(120)であって、該MRIボアとMRIボア内部の対象の間にクリアランスを提供するように構成されているMRIボアと、
対象からのPET放出を検出するように前記MRIボア(120)に結合させたPET検出器システム(130)であって、MRIボアに対して後退可能に配列させた少なくとも1つの検出器素子を備えたPET検出器(130)と、
を備えるMRI−PETイメージャ(100)。
【請求項2】
MRIボアに結合させた前記PET検出器システム(130)はMRIボアの外部に配置させている、請求項1に記載のMRI−PETイメージャ(100)。
【請求項3】
前記少なくとも1つのPET検出器素子はMRIボアの外部で後退可能に配列させている、請求項1に記載のMRI−PETイメージャ(100)。
【請求項4】
前記少なくとも1つのPET検出器素子はPET検出器システムのアパーチャを画定しており、該アパーチャのサイズは該少なくとも1つの検出器素子の動きを介して調節可能である、請求項1に記載のMRI−PETイメージャ(100)。
【請求項5】
その内部に位置決めされた対象のMR画像を取り込むように構成されたMRIボア(120)と、
対象からのPET放出を検出するようにMRIボア(120)の外部に配置させたPET検出器システム(130)であって、MRIボアの外部で後退可能に配列させた少なくとも1つのPET検出器素子を備えたPET検出器システム(130)と、
を備えるMRI−PET複合型イメージャ(200)。
【請求項6】
前記少なくとも1つの検出器素子は、少なくとも1つの検出器によって画定されるアパーチャを通って対象をトラバースさせるためのクリアランスを提供するように後退可能となっている、請求項5に記載のMRI−PET複合型イメージャ(200)。
【請求項7】
MRI−PET複合型イメージャを動作させる方法(700)であって、
MRIボア内部に位置決めされた対象のMR画像を取り込むステップ(720)と、
対象からのPET放出を検出するためにMRIボアの外部に、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子(135)を備えたPET検出器システムを配置させるステップ(740)と、
を含む方法(700)。
【請求項8】
少なくとも2つのセグメントを備えるようにPET検出器システムを形成すると共に、該少なくとも2つのセグメントをMRIボア内に対象をトラバースさせるためのクリアランスを提供するために第1の方向に沿って拡張するように構成するステップをさらに含む請求項7に記載の方法(700)。
【請求項9】
MRI−PET複合型イメージャにおいて対象のMRI−PET複合撮像を実行する方法であって、
MRI視野域(FOV)内に対象をトラバースさせるためのクリアランスを提供するためにPET検出器システムの検出器素子を後退させるステップと、
MRI FOV内に位置決めされた対象のMR画像を取り込むステップと、
PET検出器FOVの内部に対象を受け容れるステップと、
PET検出器と対象の間にクリアランスが提供されるようにPET検出器素子を再位置決めするステップと、
PET検出器FOVの内部で対象のPET画像を取り込むステップと、
を含む方法。
【請求項10】
PET検出器と対象の間にクリアランスが提供されるようにPET検出器素子を後退させる前記ステップは、検出器素子を後退させることによって少なくとも1つの検出器素子によって画定されるアパーチャを制御することを含む、請求項9に記載の方法。
【請求項1】
対象の撮像を実行するための磁気共鳴イメージャ(MRI)/陽電子放出断層(PET)イメージャ(100)であって、
対象のMR撮像を実行するように構成されたMRIボア(120)であって、該MRIボアとMRIボア内部の対象の間にクリアランスを提供するように構成されているMRIボアと、
対象からのPET放出を検出するように前記MRIボア(120)に結合させたPET検出器システム(130)であって、MRIボアに対して後退可能に配列させた少なくとも1つの検出器素子を備えたPET検出器(130)と、
を備えるMRI−PETイメージャ(100)。
【請求項2】
MRIボアに結合させた前記PET検出器システム(130)はMRIボアの外部に配置させている、請求項1に記載のMRI−PETイメージャ(100)。
【請求項3】
前記少なくとも1つのPET検出器素子はMRIボアの外部で後退可能に配列させている、請求項1に記載のMRI−PETイメージャ(100)。
【請求項4】
前記少なくとも1つのPET検出器素子はPET検出器システムのアパーチャを画定しており、該アパーチャのサイズは該少なくとも1つの検出器素子の動きを介して調節可能である、請求項1に記載のMRI−PETイメージャ(100)。
【請求項5】
その内部に位置決めされた対象のMR画像を取り込むように構成されたMRIボア(120)と、
対象からのPET放出を検出するようにMRIボア(120)の外部に配置させたPET検出器システム(130)であって、MRIボアの外部で後退可能に配列させた少なくとも1つのPET検出器素子を備えたPET検出器システム(130)と、
を備えるMRI−PET複合型イメージャ(200)。
【請求項6】
前記少なくとも1つの検出器素子は、少なくとも1つの検出器によって画定されるアパーチャを通って対象をトラバースさせるためのクリアランスを提供するように後退可能となっている、請求項5に記載のMRI−PET複合型イメージャ(200)。
【請求項7】
MRI−PET複合型イメージャを動作させる方法(700)であって、
MRIボア内部に位置決めされた対象のMR画像を取り込むステップ(720)と、
対象からのPET放出を検出するためにMRIボアの外部に、MRIボアの外部で後退可能に配列させた少なくとも1つの検出器素子(135)を備えたPET検出器システムを配置させるステップ(740)と、
を含む方法(700)。
【請求項8】
少なくとも2つのセグメントを備えるようにPET検出器システムを形成すると共に、該少なくとも2つのセグメントをMRIボア内に対象をトラバースさせるためのクリアランスを提供するために第1の方向に沿って拡張するように構成するステップをさらに含む請求項7に記載の方法(700)。
【請求項9】
MRI−PET複合型イメージャにおいて対象のMRI−PET複合撮像を実行する方法であって、
MRI視野域(FOV)内に対象をトラバースさせるためのクリアランスを提供するためにPET検出器システムの検出器素子を後退させるステップと、
MRI FOV内に位置決めされた対象のMR画像を取り込むステップと、
PET検出器FOVの内部に対象を受け容れるステップと、
PET検出器と対象の間にクリアランスが提供されるようにPET検出器素子を再位置決めするステップと、
PET検出器FOVの内部で対象のPET画像を取り込むステップと、
を含む方法。
【請求項10】
PET検出器と対象の間にクリアランスが提供されるようにPET検出器素子を後退させる前記ステップは、検出器素子を後退させることによって少なくとも1つの検出器素子によって画定されるアパーチャを制御することを含む、請求項9に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−13725(P2013−13725A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−146221(P2012−146221)
【出願日】平成24年6月29日(2012.6.29)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2012−146221(P2012−146221)
【出願日】平成24年6月29日(2012.6.29)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]