
ORC設備の誘導発電機を送電線網と同期させる方法
本発明は、誘導機械を電気送電線網(170)と同期させるシステムおよび方法である。記載の実施形態は、タービン(140)と機械的に連通するモータ発電機(150)を有するORC発電設備である。モータ発電機(150)は、可変速ポンプ(120)でタービンを駆動することにより、巻線が開いた状態(たとえばフリーホイール状態)で動作する。モータ発電機(150)の回転速度が検出される。モータ発電機(150)が、ORC発電設備の動作に相当する定常状態回転速度に近い回転速度で動作している場合は、モータ発電機の巻線と送電線網(170)との間の接触子が閉じられ、モータが送電線網(170)と同期する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、誘導発電機の始動手順に関する。より具体的には、本発明は、タービンに接続されたORCモータ発電機の同期手順に関する。
【0002】
(関連出願の相互参照)
本願は、2004年5月6日に出願され、弁理士整理番号第965−034号によりさらに特定される、米国特許出願出願番号第10/839,914号の優先権を主張するものである。
【背景技術】
【0003】
従来、誘導発電機は、送電線網(grid)電力を用いて励磁を達成してモータとして始動されることが可能である。この方法では、この機械はモータとして始動し(すなわち、電力を消費し)、送電線網同期速度よりやや遅い速度で動作する。ORC機械では、その後に冷媒蒸気がタービン入口に導入され、タービンによって膨張させられる。冷媒の流量が増えるにつれて、誘導機械の動作モードがモータから発電機に変わる。発電機としては、この機械は同期速度よりやや速い速度で動作する。
【0004】
大型の誘導機械の場合、モータとして始動するためには、高い突入電流を避けるための保護対策を追加で用いることが必要になる。一般に用いられるのは、単巻変圧器やワイ−デルタ(Wye−Delta)スタータのような低電圧スタータである。
【0005】
1998年2月3日にマイクセル(Mikesell)らに付与された米国特許第5,714,862号は、惰性誘導モータの回転速度測定手法を開示している。この速度はモータの電力端子の残留電圧を検出することによって測定され、これにより、従来のタコメータ機器、機械部品の追加、または誘導モータ自体の変更が不要になる。
【発明の開示】
【課題を解決するための手段】
【0006】
一態様では、本発明は、ORC発電設備に関する。ORC発電設備は、電力送電線網に切り換え可能に直接接続されるようにかつ電力送電線網から切断されるように構成されたモータ発電機と、作動流体用循環経路と、を備え、作動流体用循環経路は、モータ発電機と機械的に連通しかつ流体入口および流体出口を有するタービンと、熱エネルギーを受け取る熱入力、作動流体を液体の形で受け取る入力、およびタービンの流体入口と流体連通して作動流体を蒸気の形でタービンの流体入口に送る出力を有する蒸発器と、タービンの出口と連通して流体出口から蒸気を受け取る入力を有する凝縮器であって、その蒸気を液体に凝縮させるようにかつその液体を凝縮器出口に送るように適合された凝縮器と、液体をポンプ送りする可変速ポンプであって、凝縮器の出口から液体を受け取る入力と、その液体を蒸発器の入力に送る出口とを有し、制御信号入力端子を有する可変速ポンプと、を備える。ORC発電設備はさらに、モータ発電機の回転速度を測定し、出力信号を与える回転速度センサと、ポンプ速度を制御するポンプ速度制御装置であって、回転速度センサの出力信号に少なくとも部分的に基づく信号を受け取り、可変速ポンプの制御信号入力端子に制御信号を与えるポンプ速度制御装置と、を含む。ORC発電設備は、発電機として構成されかつ発電機として電力送電線網から切断されたモータ発電機によって始動するように構成される。
【0007】
一実施形態では、回転速度センサは、磁気ピックアップおよびタコメータのうちの選択された一方である。一実施形態では、回転速度センサは、回転速度を推定するように構成された解析センサである。一実施形態では、解析センサは、巻線内の残留磁界を測定するように構成されたセンサである。一実施形態では、解析センサは、振動スペクトルを測定するように構成されたセンサである。
【0008】
別の態様では、本発明は、ORC発電設備を制御可能に始動する方法を特徴とする。この方法は、可変速ポンプと、ORC発電設備のモータ発電機と機械的に連通するタービンと、を備える作動流体用循環経路を備えるORC発電設備において、モータ発電機が電力送電線網から切断されている間にORC発電設備を始動するステップと、可変速ポンプの動作を制御してタービンを駆動し、それによって、モータ発電機を駆動するステップと、モータ発電機の回転速度を測定するステップと、モータ発電機の回転速度が、電力送電線網から電力を直接供給されている場合のモータ発電機の定常状態速度にほぼ等しい速度に達したら、モータ発電機を電力送電線網に、切り換え可能に、直接接続し、それによって、ORC発電設備の定常状態動作を達成するステップと、を含む。
【0009】
一実施形態では、モータ発電機の回転速度を測定するステップは、回転速度が抽出される基になる、振動スペクトルのピークを探すことを含む。一実施形態では、モータ発電機の回転速度を測定するステップは、モータ発電機の回転子巻線内の残留磁気を測定することを含む。一実施形態では、ORC発電機を送電線網に接続する前に、可変速ポンプを用いて回転速度を制御する。一実施形態では、ポンプ速度が上がると、回転速度が上がる。一実施形態では、ポンプ速度が下がると、回転速度が下がる。
【0010】
以上およびその他の本発明の目的、態様、特徴および利点が、以下の記載および特許請求項からより明らかになるであろう。
【0011】
本発明の目的および特徴は、添付の図面および特許請求の範囲を参照することにより、よりよく理解できるであろう。これらの図面は、必ずしも一定の縮尺で描かれているわけではなく、その代わりに主に本発明の原理の説明に重点が置かれている。図面では、類似の参照符号は、各図面を通して類似の部分を示すために用いられている。
【発明を実施するための最良の形態】
【0012】
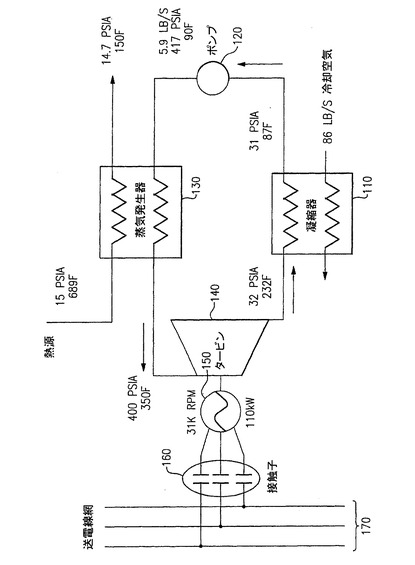
有機的ランキン最低下サイクル(Organic Rankine Bottoming Cycle)(ORC)を分散型発電システムに追加して、その全体効率を上げることが可能である。ORCは、燃料を直接には消費せず、マイクロタービンまたは往復動装置あるいは他の熱源とすることができる「原動機」の廃棄物を使用する。図1は、本発明の原理を実施する例示的ORC発電設備の概略図である。主要要素は、凝縮器110、差動流体(冷媒)ポンプ120、蒸発器130、任意選択の回収熱交換器(図1に図示せず)、およびモータ発電機150に接続されたタービン140である。モータ発電機150は、モータ発電機の各巻線を送電線網170に接続するのに使用される接触子160を有する。図1に示した実施形態では、送電線網170およびモータ発電機150を三相電気系統として示している。本明細書で説明する実施形態では、差動流体は、1,1,1,3,3−ペンタフルオロプロパン(R245faとして知られる)であり、これは、ハネウェル社(Honeywell Corporation)またはデュポン社(E.I.DuPont DeNemours and Company)から入手できる。
【0013】
前述の同時係属中の米国特許出願では、「定常状態」動作中に前述の目的を達成するための様々な制御方法を説明している。前述の同時係属中の米国特許出願では、熱力学サイクルを始動するための独立した制御手順を開示している。本開示では、ORC設備のタービン発電機ユニットの始動手順を説明する。
【0014】
単巻変圧器やワイ−デルタ(Wye−Delta)スタータのような追加設備を用いずに誘導発電機を円滑に送電線網に接続することを可能にする始動方法を案出した。これにより、タービン/発電機を、簡単かつ廉価な全電圧(across−the−line)接触子スタータで始動することができる。これを達成するために、ORC設備を、送電線網と発電機との間の接触子を開いた状態で始動する。次に、蒸発器に熱を加え、液体冷媒ポンプを制御して、熱力学サイクルを始動する。タービン全体に亘るタービン出口圧力を入口圧力で割った圧力比は、ゼロから始まり、その後増加する。この圧力は、この「フリーホイール」状態においてタービン140と、さらに、これによって駆動されるモータ発電機150との速度が同期速度に向かってゆっくり増えていくように制御される。この速度がモータ発電機の同期速度に近づくと、全電圧接触子160が閉じられる。
【0015】
この始動方法を実現するには、次の2つの新しい要素すなわち、
1.以下で説明する、タービンおよびモータ発電機のフリーホイール速度を制御可能にする方法と、
2.以下で説明する、モータ発電機が同期速度に近くなったときのモータ発電機およびタービンのうちの少なくとも一方の回転速度の高精度(〜1%)の測定と、
が重要である。
【0016】
前述の同時係属中の出願の開示では、ORC設備の熱サイクルの場合の円滑な始動手順を説明している。この始動期間の間に、システム動作をある領域から別の領域に移すために、過熱制御システムの上限圧力を動的に変化させる。この始動方法は、以下の手順に従い、開ループから閉ループに移行し、その後、限度圧力を変化させて動作圧力をゆっくり増やしていく。
【0017】
この方法は、
たとえば設計エンタルピーフラックスのほぼ半分で、高温空気を蒸発器に加えるステップと、
より低いまたは最小の速度、たとえば15Hzでポンプをオンにするステップと、
上限圧力を、初期の低いポンプ速度で、定常状態で達成できる圧力の値、たとえば70psiaに設定するステップと、
動作条件がポンプ曲線の圧力プラトーに達するまで待機するステップと、
限度圧力を280psiaなどといったその正常値まで上昇させるステップと、
280psiaなどといった所望の限度圧力またはこれを下回る圧力で、モードを圧力制御から過熱制御に切り換えることを可能にするステップと、
高温空気エンタルピーフラックスを増やし、制御して、システムを、蒸発器出口において圧力および温度が最大になる状態として定義される、全負荷状態にもっていくステップと、
を含む。
【0018】
始動プロセスが、上昇させるステップに入ると、タービン発電機ユニットの速度が連続的に監視される。速度が同期速度近く(たとえば、同期速度の5%以内)の値に達すると、ただちに接触子が閉じられ、発電機の同期プロセスが完了する。誘導機械を発電機として利用する場合は、この機械が送電線網に接続されているときに、回転子の速度を、図2に示したトルク−速度特性のプッシュオーバ点(pushover point)に相当する速度を下回るようにするのが好都合である。システムがプッシュオーバ点を過ぎると、回転子の速度が制御不能になり、発電機の保全性が危うくなる。そのような事態になった場合は、全ORCシステムをただちに運転停止しなければならない。
【0019】
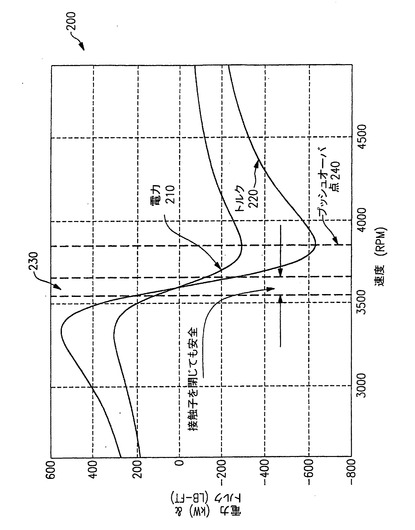
図2は、本発明の方法の実施に有用なモータについての、電力210とトルク220との関係を回転速度の関数として示した図200である。図から分かるように、回転速度の範囲230を示したが、これは、モータに対する電気的接触子を閉じることによってモータを送電線網に接続することが安全な範囲である。プッシュオーバ点240は、図示した実施形態では約3840RPMの回転速度に相当する垂直線で示されている。プッシュオーバ点は、回転速度であって、この回転速度を超えると発生トルクが速度の増加とともに減少し、抑制しない限り暴走状態につながる、そのような回転速度として定義される。
【0020】
(速度センサ)
タービンの速度を測定する方法の1つは、タコメータや磁気ピックアップセンサなどの任意の市販の回転速度センサを用いることである。磁気ピックアップセンサは、本質的に、永久磁化されたプローブのまわりに巻かれたコイルである。歯車の歯、タービンインペラのブレード、溝付きディスク、キー溝付きシャフトなどのような離散的な強磁性物体がプローブの磁界を通過すると、磁束密度が変調される。これにより、コイルにAC電圧が誘起される。コイルのそばを通過する物体(またはスロット)ごとに、完全な1サイクルの電圧が発生する。物体(またはスロット)が回転シャフト上に均等に配置されている場合は、総サイクル数が回転全体の尺度になり、AC電圧の周波数がシャフトの回転速度に正比例する。AC周波数が、たとえばカウンタで測定されることはよく知られている。
【0021】
(解析センサ)
速度の測定に物理センサを用いる場合は、センサを発電機のシャフト上に取り付けることが必要である。解析センサは、発電機と物理的に接触しなくてよいという利点があり、比較的安価な回路と、必要に応じて電気機械的部品とを用いて実装することが可能である。したがって、解析センサは、一般に、タコメータのような従来型センサより安価な選択肢である。回転子の回転速度を解析的に推定可能な方法は2つある。第1の方法は、回転子巻線内の残留磁気を用いて回転子の速度を検出する方法である。フリーホイール状態では、固定子巻線回路は開いている。回転子巻線内の残留磁気に起因して、固定子巻線内に小さなAC電圧が誘起される。固定子巻線端子間にかかる、この開いた回路の電圧を用いて、回転子の速度を推定することが可能である。測定電圧波形のゼロ交差点を、周波数カウンタを用いてカウントすることが可能であり、それによって回転子速度の推定値が得られる。
【0022】
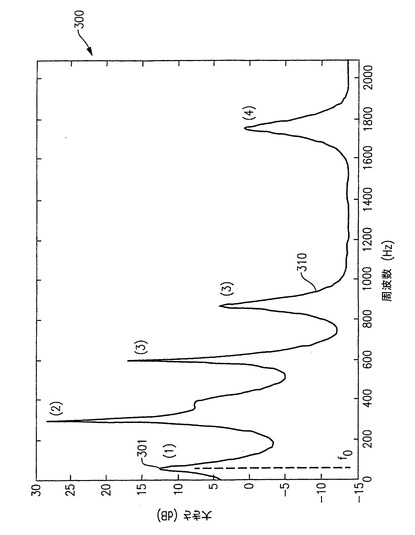
第2の解析的方法は、加速度計を用いてタービンの振動を測定する方法である。振動センサは、タービンのケーシング上に取り付けることが可能である。振動データは連続的に捕捉され、振動のスペクトルが高速フーリエ変換を用いて計算される。この計算を行う計算装置は、機械可読媒体に記録された1つまたは複数の命令を含むプログラムを使用する、プログラムされた汎用コンピュータまたは汎用マイクロプロセッサであってもよく、また、FPGAやDSPのようなプログラムされたゲートアレイなどといった他の計算を実施できるデバイスであってもよい。スペクトルからは、回転子の回転速度を推定することが可能である。図3は、ORCタービン発電機のケーシング上で測定された振動データのスペクトル310を示す図300である。スペクトルにはいくつかのピークがあり、これらは主に、回転子の回転周波数とその高調波に対応する。図3の第1のピーク301は、回転子の回転周波数(f0)に対応し、これから回転速度が、
n=120f0/P
に従って計算される。ただし、nは発電機の回転速度、f0は、スペクトルから抽出した、回転子の回転周波数、Pは回転子の極数である。
【0023】
ORC制御装置は、ピークサーチアルゴリズムが実装されており、スペクトルから第1のピークを自動的に抽出し、それを速度計算に用いる。当該技術分野において知られている、一般的に使用されるピークサーチアルゴリズムは、スペクトルから回転子の回転速度を抽出することに用いることが可能である。
【0024】
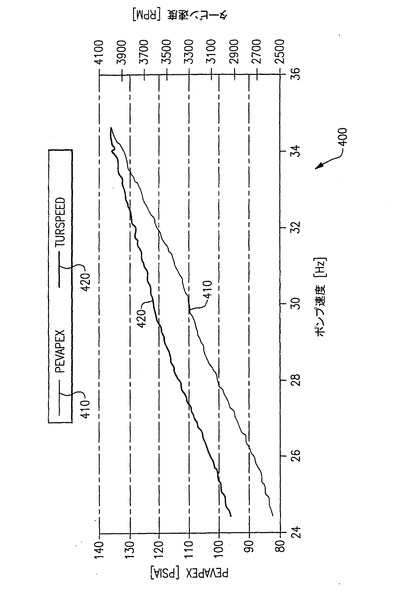
図4は、ORC設備における本発明の実施形態の、ポンプ速度と、対応する蒸発器出口圧力(PEVAPEX)410およびタービン速度(TURSPEED)420との間の関係を示す試験データを示す図400である。低いほうの曲線がPEVAPEX410である。始動プロセスにおいては、PEVAPEX410は、ポンプ速度の変化を通じて、ゆっくり上昇する。この期間の間、タービン140は蒸発器からの蒸気によって駆動され、モータ発電機150はフリーホイール状態である。送電線網と接続するための、モータ発電機の接触子160は開いている。タービン140およびモータ発電機150の速度が、本実施形態では約3600rpmであるモータ発電機150の同期速度に近づくと、速度フィードバックの助けにより、接触子が閉じられる。発電機をこの速度で同期させると、突入電流が最小になり、送電線網への円滑な接続が保証される。
【0025】
図4はさらに、タービン速度が、過熱制御ループのアクチュエータ、可変速ポンプ120によって調節可能であるという事実を示している。何らかの理由でタービン速度が、接触子160を閉じても安全であると想定される範囲にない場合は、ポンプ速度を変化させてタービン速度を調節することが可能である。ポンプ速度が変化すると、実際には、タービン140に流入する差動流体の質量流量が変化し、それによってタービン速度が変化する。
【0026】
以上の開示した始動手順は、従来の始動手順で用いられているような追加の始動設備を用いなくてもよいという点で有利である。この改良された手順および装置は、ORC発電機の同期モジュールの設計を簡略化可能にするとともに、タービンの速度調整用のスロットルバルブを用いないことによってコストを減らすことを可能にする。
【0027】
当業者であれば、電気的および電子的装置の多くの機能を、ハードウェア(たとえば結線で接続された論理)、ソフトウェア(たとえば、汎用プロセッサ上で動作するプログラムの形で符号化された論理)、およびファームウェア(たとえば、必要に応じてプロセッサ上の動作のために呼び出される、不揮発性メモリ内で符号化された論理)の形で実装することが可能であることを理解されよう。本発明は、ハードウェア、ファームウェア、およびソフトウェアの一実施態様を、別のハードウェア、ファームウェアおよびソフトウェアのいずれかを用いる、等価な機能の別の実施態様の代わりに用いることを想定している。実装が伝達関数によって数学的に表現できる限りにおいて、すなわち、伝達関数を表す「ブラックボックス」の入力端子に加えられた特定の励起に対して出力端子に所定の応答が発生する限りにおいては、伝達関数の部分または断片の、ハードウェア、ファームウェアおよびソフトウェアによる実装の任意の組み合わせを含む、伝達関数の任意の実装が、本明細書において想定されている。
【0028】
本明細書に開示した構造を参照して本発明を説明してきたが、本発明は、記載された詳細に制限されず、添付の特許請求項の範囲に含まれうる任意の修正および変更を包含するものとする。
【図面の簡単な説明】
【0029】
【図1】本発明によるORC電力設備の実施形態を示す図。
【図2】本発明の方法の実施に有用なモータについての、電力とトルクとの関係を回転速度の関数として示した図。
【図3】本発明の原理による、ORCタービン発電機のケーシング上で測定された振動データのスペクトルを示す図。
【図4】本発明の実施形態の、ポンプ速度と、対応する蒸発器出口圧力およびタービン速度との間の関係を示す試験データを示す図。
【技術分野】
【0001】
本発明は、誘導発電機の始動手順に関する。より具体的には、本発明は、タービンに接続されたORCモータ発電機の同期手順に関する。
【0002】
(関連出願の相互参照)
本願は、2004年5月6日に出願され、弁理士整理番号第965−034号によりさらに特定される、米国特許出願出願番号第10/839,914号の優先権を主張するものである。
【背景技術】
【0003】
従来、誘導発電機は、送電線網(grid)電力を用いて励磁を達成してモータとして始動されることが可能である。この方法では、この機械はモータとして始動し(すなわち、電力を消費し)、送電線網同期速度よりやや遅い速度で動作する。ORC機械では、その後に冷媒蒸気がタービン入口に導入され、タービンによって膨張させられる。冷媒の流量が増えるにつれて、誘導機械の動作モードがモータから発電機に変わる。発電機としては、この機械は同期速度よりやや速い速度で動作する。
【0004】
大型の誘導機械の場合、モータとして始動するためには、高い突入電流を避けるための保護対策を追加で用いることが必要になる。一般に用いられるのは、単巻変圧器やワイ−デルタ(Wye−Delta)スタータのような低電圧スタータである。
【0005】
1998年2月3日にマイクセル(Mikesell)らに付与された米国特許第5,714,862号は、惰性誘導モータの回転速度測定手法を開示している。この速度はモータの電力端子の残留電圧を検出することによって測定され、これにより、従来のタコメータ機器、機械部品の追加、または誘導モータ自体の変更が不要になる。
【発明の開示】
【課題を解決するための手段】
【0006】
一態様では、本発明は、ORC発電設備に関する。ORC発電設備は、電力送電線網に切り換え可能に直接接続されるようにかつ電力送電線網から切断されるように構成されたモータ発電機と、作動流体用循環経路と、を備え、作動流体用循環経路は、モータ発電機と機械的に連通しかつ流体入口および流体出口を有するタービンと、熱エネルギーを受け取る熱入力、作動流体を液体の形で受け取る入力、およびタービンの流体入口と流体連通して作動流体を蒸気の形でタービンの流体入口に送る出力を有する蒸発器と、タービンの出口と連通して流体出口から蒸気を受け取る入力を有する凝縮器であって、その蒸気を液体に凝縮させるようにかつその液体を凝縮器出口に送るように適合された凝縮器と、液体をポンプ送りする可変速ポンプであって、凝縮器の出口から液体を受け取る入力と、その液体を蒸発器の入力に送る出口とを有し、制御信号入力端子を有する可変速ポンプと、を備える。ORC発電設備はさらに、モータ発電機の回転速度を測定し、出力信号を与える回転速度センサと、ポンプ速度を制御するポンプ速度制御装置であって、回転速度センサの出力信号に少なくとも部分的に基づく信号を受け取り、可変速ポンプの制御信号入力端子に制御信号を与えるポンプ速度制御装置と、を含む。ORC発電設備は、発電機として構成されかつ発電機として電力送電線網から切断されたモータ発電機によって始動するように構成される。
【0007】
一実施形態では、回転速度センサは、磁気ピックアップおよびタコメータのうちの選択された一方である。一実施形態では、回転速度センサは、回転速度を推定するように構成された解析センサである。一実施形態では、解析センサは、巻線内の残留磁界を測定するように構成されたセンサである。一実施形態では、解析センサは、振動スペクトルを測定するように構成されたセンサである。
【0008】
別の態様では、本発明は、ORC発電設備を制御可能に始動する方法を特徴とする。この方法は、可変速ポンプと、ORC発電設備のモータ発電機と機械的に連通するタービンと、を備える作動流体用循環経路を備えるORC発電設備において、モータ発電機が電力送電線網から切断されている間にORC発電設備を始動するステップと、可変速ポンプの動作を制御してタービンを駆動し、それによって、モータ発電機を駆動するステップと、モータ発電機の回転速度を測定するステップと、モータ発電機の回転速度が、電力送電線網から電力を直接供給されている場合のモータ発電機の定常状態速度にほぼ等しい速度に達したら、モータ発電機を電力送電線網に、切り換え可能に、直接接続し、それによって、ORC発電設備の定常状態動作を達成するステップと、を含む。
【0009】
一実施形態では、モータ発電機の回転速度を測定するステップは、回転速度が抽出される基になる、振動スペクトルのピークを探すことを含む。一実施形態では、モータ発電機の回転速度を測定するステップは、モータ発電機の回転子巻線内の残留磁気を測定することを含む。一実施形態では、ORC発電機を送電線網に接続する前に、可変速ポンプを用いて回転速度を制御する。一実施形態では、ポンプ速度が上がると、回転速度が上がる。一実施形態では、ポンプ速度が下がると、回転速度が下がる。
【0010】
以上およびその他の本発明の目的、態様、特徴および利点が、以下の記載および特許請求項からより明らかになるであろう。
【0011】
本発明の目的および特徴は、添付の図面および特許請求の範囲を参照することにより、よりよく理解できるであろう。これらの図面は、必ずしも一定の縮尺で描かれているわけではなく、その代わりに主に本発明の原理の説明に重点が置かれている。図面では、類似の参照符号は、各図面を通して類似の部分を示すために用いられている。
【発明を実施するための最良の形態】
【0012】
有機的ランキン最低下サイクル(Organic Rankine Bottoming Cycle)(ORC)を分散型発電システムに追加して、その全体効率を上げることが可能である。ORCは、燃料を直接には消費せず、マイクロタービンまたは往復動装置あるいは他の熱源とすることができる「原動機」の廃棄物を使用する。図1は、本発明の原理を実施する例示的ORC発電設備の概略図である。主要要素は、凝縮器110、差動流体(冷媒)ポンプ120、蒸発器130、任意選択の回収熱交換器(図1に図示せず)、およびモータ発電機150に接続されたタービン140である。モータ発電機150は、モータ発電機の各巻線を送電線網170に接続するのに使用される接触子160を有する。図1に示した実施形態では、送電線網170およびモータ発電機150を三相電気系統として示している。本明細書で説明する実施形態では、差動流体は、1,1,1,3,3−ペンタフルオロプロパン(R245faとして知られる)であり、これは、ハネウェル社(Honeywell Corporation)またはデュポン社(E.I.DuPont DeNemours and Company)から入手できる。
【0013】
前述の同時係属中の米国特許出願では、「定常状態」動作中に前述の目的を達成するための様々な制御方法を説明している。前述の同時係属中の米国特許出願では、熱力学サイクルを始動するための独立した制御手順を開示している。本開示では、ORC設備のタービン発電機ユニットの始動手順を説明する。
【0014】
単巻変圧器やワイ−デルタ(Wye−Delta)スタータのような追加設備を用いずに誘導発電機を円滑に送電線網に接続することを可能にする始動方法を案出した。これにより、タービン/発電機を、簡単かつ廉価な全電圧(across−the−line)接触子スタータで始動することができる。これを達成するために、ORC設備を、送電線網と発電機との間の接触子を開いた状態で始動する。次に、蒸発器に熱を加え、液体冷媒ポンプを制御して、熱力学サイクルを始動する。タービン全体に亘るタービン出口圧力を入口圧力で割った圧力比は、ゼロから始まり、その後増加する。この圧力は、この「フリーホイール」状態においてタービン140と、さらに、これによって駆動されるモータ発電機150との速度が同期速度に向かってゆっくり増えていくように制御される。この速度がモータ発電機の同期速度に近づくと、全電圧接触子160が閉じられる。
【0015】
この始動方法を実現するには、次の2つの新しい要素すなわち、
1.以下で説明する、タービンおよびモータ発電機のフリーホイール速度を制御可能にする方法と、
2.以下で説明する、モータ発電機が同期速度に近くなったときのモータ発電機およびタービンのうちの少なくとも一方の回転速度の高精度(〜1%)の測定と、
が重要である。
【0016】
前述の同時係属中の出願の開示では、ORC設備の熱サイクルの場合の円滑な始動手順を説明している。この始動期間の間に、システム動作をある領域から別の領域に移すために、過熱制御システムの上限圧力を動的に変化させる。この始動方法は、以下の手順に従い、開ループから閉ループに移行し、その後、限度圧力を変化させて動作圧力をゆっくり増やしていく。
【0017】
この方法は、
たとえば設計エンタルピーフラックスのほぼ半分で、高温空気を蒸発器に加えるステップと、
より低いまたは最小の速度、たとえば15Hzでポンプをオンにするステップと、
上限圧力を、初期の低いポンプ速度で、定常状態で達成できる圧力の値、たとえば70psiaに設定するステップと、
動作条件がポンプ曲線の圧力プラトーに達するまで待機するステップと、
限度圧力を280psiaなどといったその正常値まで上昇させるステップと、
280psiaなどといった所望の限度圧力またはこれを下回る圧力で、モードを圧力制御から過熱制御に切り換えることを可能にするステップと、
高温空気エンタルピーフラックスを増やし、制御して、システムを、蒸発器出口において圧力および温度が最大になる状態として定義される、全負荷状態にもっていくステップと、
を含む。
【0018】
始動プロセスが、上昇させるステップに入ると、タービン発電機ユニットの速度が連続的に監視される。速度が同期速度近く(たとえば、同期速度の5%以内)の値に達すると、ただちに接触子が閉じられ、発電機の同期プロセスが完了する。誘導機械を発電機として利用する場合は、この機械が送電線網に接続されているときに、回転子の速度を、図2に示したトルク−速度特性のプッシュオーバ点(pushover point)に相当する速度を下回るようにするのが好都合である。システムがプッシュオーバ点を過ぎると、回転子の速度が制御不能になり、発電機の保全性が危うくなる。そのような事態になった場合は、全ORCシステムをただちに運転停止しなければならない。
【0019】
図2は、本発明の方法の実施に有用なモータについての、電力210とトルク220との関係を回転速度の関数として示した図200である。図から分かるように、回転速度の範囲230を示したが、これは、モータに対する電気的接触子を閉じることによってモータを送電線網に接続することが安全な範囲である。プッシュオーバ点240は、図示した実施形態では約3840RPMの回転速度に相当する垂直線で示されている。プッシュオーバ点は、回転速度であって、この回転速度を超えると発生トルクが速度の増加とともに減少し、抑制しない限り暴走状態につながる、そのような回転速度として定義される。
【0020】
(速度センサ)
タービンの速度を測定する方法の1つは、タコメータや磁気ピックアップセンサなどの任意の市販の回転速度センサを用いることである。磁気ピックアップセンサは、本質的に、永久磁化されたプローブのまわりに巻かれたコイルである。歯車の歯、タービンインペラのブレード、溝付きディスク、キー溝付きシャフトなどのような離散的な強磁性物体がプローブの磁界を通過すると、磁束密度が変調される。これにより、コイルにAC電圧が誘起される。コイルのそばを通過する物体(またはスロット)ごとに、完全な1サイクルの電圧が発生する。物体(またはスロット)が回転シャフト上に均等に配置されている場合は、総サイクル数が回転全体の尺度になり、AC電圧の周波数がシャフトの回転速度に正比例する。AC周波数が、たとえばカウンタで測定されることはよく知られている。
【0021】
(解析センサ)
速度の測定に物理センサを用いる場合は、センサを発電機のシャフト上に取り付けることが必要である。解析センサは、発電機と物理的に接触しなくてよいという利点があり、比較的安価な回路と、必要に応じて電気機械的部品とを用いて実装することが可能である。したがって、解析センサは、一般に、タコメータのような従来型センサより安価な選択肢である。回転子の回転速度を解析的に推定可能な方法は2つある。第1の方法は、回転子巻線内の残留磁気を用いて回転子の速度を検出する方法である。フリーホイール状態では、固定子巻線回路は開いている。回転子巻線内の残留磁気に起因して、固定子巻線内に小さなAC電圧が誘起される。固定子巻線端子間にかかる、この開いた回路の電圧を用いて、回転子の速度を推定することが可能である。測定電圧波形のゼロ交差点を、周波数カウンタを用いてカウントすることが可能であり、それによって回転子速度の推定値が得られる。
【0022】
第2の解析的方法は、加速度計を用いてタービンの振動を測定する方法である。振動センサは、タービンのケーシング上に取り付けることが可能である。振動データは連続的に捕捉され、振動のスペクトルが高速フーリエ変換を用いて計算される。この計算を行う計算装置は、機械可読媒体に記録された1つまたは複数の命令を含むプログラムを使用する、プログラムされた汎用コンピュータまたは汎用マイクロプロセッサであってもよく、また、FPGAやDSPのようなプログラムされたゲートアレイなどといった他の計算を実施できるデバイスであってもよい。スペクトルからは、回転子の回転速度を推定することが可能である。図3は、ORCタービン発電機のケーシング上で測定された振動データのスペクトル310を示す図300である。スペクトルにはいくつかのピークがあり、これらは主に、回転子の回転周波数とその高調波に対応する。図3の第1のピーク301は、回転子の回転周波数(f0)に対応し、これから回転速度が、
n=120f0/P
に従って計算される。ただし、nは発電機の回転速度、f0は、スペクトルから抽出した、回転子の回転周波数、Pは回転子の極数である。
【0023】
ORC制御装置は、ピークサーチアルゴリズムが実装されており、スペクトルから第1のピークを自動的に抽出し、それを速度計算に用いる。当該技術分野において知られている、一般的に使用されるピークサーチアルゴリズムは、スペクトルから回転子の回転速度を抽出することに用いることが可能である。
【0024】
図4は、ORC設備における本発明の実施形態の、ポンプ速度と、対応する蒸発器出口圧力(PEVAPEX)410およびタービン速度(TURSPEED)420との間の関係を示す試験データを示す図400である。低いほうの曲線がPEVAPEX410である。始動プロセスにおいては、PEVAPEX410は、ポンプ速度の変化を通じて、ゆっくり上昇する。この期間の間、タービン140は蒸発器からの蒸気によって駆動され、モータ発電機150はフリーホイール状態である。送電線網と接続するための、モータ発電機の接触子160は開いている。タービン140およびモータ発電機150の速度が、本実施形態では約3600rpmであるモータ発電機150の同期速度に近づくと、速度フィードバックの助けにより、接触子が閉じられる。発電機をこの速度で同期させると、突入電流が最小になり、送電線網への円滑な接続が保証される。
【0025】
図4はさらに、タービン速度が、過熱制御ループのアクチュエータ、可変速ポンプ120によって調節可能であるという事実を示している。何らかの理由でタービン速度が、接触子160を閉じても安全であると想定される範囲にない場合は、ポンプ速度を変化させてタービン速度を調節することが可能である。ポンプ速度が変化すると、実際には、タービン140に流入する差動流体の質量流量が変化し、それによってタービン速度が変化する。
【0026】
以上の開示した始動手順は、従来の始動手順で用いられているような追加の始動設備を用いなくてもよいという点で有利である。この改良された手順および装置は、ORC発電機の同期モジュールの設計を簡略化可能にするとともに、タービンの速度調整用のスロットルバルブを用いないことによってコストを減らすことを可能にする。
【0027】
当業者であれば、電気的および電子的装置の多くの機能を、ハードウェア(たとえば結線で接続された論理)、ソフトウェア(たとえば、汎用プロセッサ上で動作するプログラムの形で符号化された論理)、およびファームウェア(たとえば、必要に応じてプロセッサ上の動作のために呼び出される、不揮発性メモリ内で符号化された論理)の形で実装することが可能であることを理解されよう。本発明は、ハードウェア、ファームウェア、およびソフトウェアの一実施態様を、別のハードウェア、ファームウェアおよびソフトウェアのいずれかを用いる、等価な機能の別の実施態様の代わりに用いることを想定している。実装が伝達関数によって数学的に表現できる限りにおいて、すなわち、伝達関数を表す「ブラックボックス」の入力端子に加えられた特定の励起に対して出力端子に所定の応答が発生する限りにおいては、伝達関数の部分または断片の、ハードウェア、ファームウェアおよびソフトウェアによる実装の任意の組み合わせを含む、伝達関数の任意の実装が、本明細書において想定されている。
【0028】
本明細書に開示した構造を参照して本発明を説明してきたが、本発明は、記載された詳細に制限されず、添付の特許請求項の範囲に含まれうる任意の修正および変更を包含するものとする。
【図面の簡単な説明】
【0029】
【図1】本発明によるORC電力設備の実施形態を示す図。
【図2】本発明の方法の実施に有用なモータについての、電力とトルクとの関係を回転速度の関数として示した図。
【図3】本発明の原理による、ORCタービン発電機のケーシング上で測定された振動データのスペクトルを示す図。
【図4】本発明の実施形態の、ポンプ速度と、対応する蒸発器出口圧力およびタービン速度との間の関係を示す試験データを示す図。
【特許請求の範囲】
【請求項1】
電力送電線網(170)に切り換え可能に直接接続されるようにかつ前記電力送電線網(170)から切断されるように構成されたモータ発電機(150)と、
作動流体用循環経路と、
を備える、ORC発電設備であって、前記作動流体用循環経路が、
前記モータ発電機(150)と機械的に連通しかつ流体入口および流体出口を有するタービン(140)と、
熱エネルギーを受け取る熱入力、前記作動流体を液体の形で受け取る入力、および前記タービン(140)の前記流体入口と流体連通して前記作動流体を蒸気の形で前記タービン(140)の前記流体入口に送る出力を有する蒸発器(130)と、
前記タービン(140)の前記出口と連通して前記流体出口から前記蒸気を受け取る入力を有する凝縮器(110)であって、前記蒸気を前記液体に凝縮させるようにかつ前記液体を凝縮器出口に送るように適合された凝縮器(110)と、
前記液体をポンプ送りする可変速ポンプ(120)であって、前記凝縮器(110)の前記出口から前記液体を受け取る入力および前記液体を前記蒸発器(130)の前記入力に送る出口を有し、制御信号入力端子を有する可変速ポンプ(120)と、
を備え、ORC発電設備はさらに、
前記モータ発電機(150)の回転速度を測定し、出力信号を与える回転速度センサと、
前記ポンプ(120)の速度を制御するポンプ速度制御装置であって、前記回転速度センサの前記出力信号に少なくとも部分的に基づく信号を受け取り、前記可変速ポンプ(120)の前記制御信号入力端子に制御信号を与えるポンプ速度制御装置と、
を備え、
これらにより、ORC発電設備は、発電機(150)として構成されかつ前記電力送電線網から切断された前記モータ発電機によって始動するように構成されたことを特徴とするORC発電設備。
【請求項2】
前記回転速度センサが、磁気ピックアップおよびタコメータのうちの選択された一方であることを特徴とする請求項1記載のORC発電設備。
【請求項3】
前記回転速度センサが、前記回転速度を推定するように構成された解析センサであることを特徴とする請求項1記載のORC発電設備。
【請求項4】
前記解析センサが、巻線内の残留磁界を測定するように構成されたセンサであることを特徴とする請求項3記載のORC発電設備。
【請求項5】
前記解析センサが、振動スペクトルを測定するように構成されたセンサであることを特徴とする請求項3記載のORC発電設備。
【請求項6】
ORC発電設備を制御可能に始動する方法であって、
可変速ポンプ(120)と、前記ORC発電設備のモータ発電機(150)と機械的に連通するタービン(140)と、を備える作動流体用循環経路を備える前記ORC発電設備において、前記モータ発電機(150)が電力送電線網(170)から切断されている間に前記ORC発電設備を始動するステップと、
前記可変速ポンプ(120)の動作を制御して前記タービン(140)を駆動し、それによって、前記モータ発電機(150)を駆動するステップと、
前記モータ発電機(150)の回転速度を測定するステップと、
前記モータ発電機(150)の回転速度が、前記電力送電線網(170)から電力を直接供給されている場合の前記モータ発電機(150)の定常状態速度にほぼ等しい速度に達したら、前記モータ発電機を前記電力送電線網に、切り換え可能に、直接接続し、それによって、前記ORC発電設備の定常状態動作を達成するステップと、
を含むことを特徴とする方法。
【請求項7】
前記モータ発電機(150)の回転速度を測定する前記ステップが、回転速度が抽出される基になる、振動スペクトルのピークを探すことを含むことを特徴とする請求項6記載のORC発電設備を制御可能に始動する方法。
【請求項8】
前記モータ発電機(150)の回転速度を測定する前記ステップが、前記モータ発電機(150)の回転子巻線内の残留磁気を測定することを含むことを特徴とする請求項6記載のORC発電設備を制御可能に始動する方法。
【請求項9】
前記ORC発電機を前記送電線網(170)に接続する前に、前記可変速ポンプ(120)を用いて回転速度を制御することを特徴とすることを特徴とする請求項6記載のORC発電設備を制御可能に始動する方法。
【請求項10】
前記ポンプ(120)の速度が上がると、前記回転速度が上がることを特徴とする請求項9記載のORC発電設備を制御可能に始動する方法。
【請求項11】
前記ポンプ(120)の速度が下がると、前記回転速度が下がることを特徴とする請求項9記載のORC発電設備を制御可能に始動する方法。
【請求項1】
電力送電線網(170)に切り換え可能に直接接続されるようにかつ前記電力送電線網(170)から切断されるように構成されたモータ発電機(150)と、
作動流体用循環経路と、
を備える、ORC発電設備であって、前記作動流体用循環経路が、
前記モータ発電機(150)と機械的に連通しかつ流体入口および流体出口を有するタービン(140)と、
熱エネルギーを受け取る熱入力、前記作動流体を液体の形で受け取る入力、および前記タービン(140)の前記流体入口と流体連通して前記作動流体を蒸気の形で前記タービン(140)の前記流体入口に送る出力を有する蒸発器(130)と、
前記タービン(140)の前記出口と連通して前記流体出口から前記蒸気を受け取る入力を有する凝縮器(110)であって、前記蒸気を前記液体に凝縮させるようにかつ前記液体を凝縮器出口に送るように適合された凝縮器(110)と、
前記液体をポンプ送りする可変速ポンプ(120)であって、前記凝縮器(110)の前記出口から前記液体を受け取る入力および前記液体を前記蒸発器(130)の前記入力に送る出口を有し、制御信号入力端子を有する可変速ポンプ(120)と、
を備え、ORC発電設備はさらに、
前記モータ発電機(150)の回転速度を測定し、出力信号を与える回転速度センサと、
前記ポンプ(120)の速度を制御するポンプ速度制御装置であって、前記回転速度センサの前記出力信号に少なくとも部分的に基づく信号を受け取り、前記可変速ポンプ(120)の前記制御信号入力端子に制御信号を与えるポンプ速度制御装置と、
を備え、
これらにより、ORC発電設備は、発電機(150)として構成されかつ前記電力送電線網から切断された前記モータ発電機によって始動するように構成されたことを特徴とするORC発電設備。
【請求項2】
前記回転速度センサが、磁気ピックアップおよびタコメータのうちの選択された一方であることを特徴とする請求項1記載のORC発電設備。
【請求項3】
前記回転速度センサが、前記回転速度を推定するように構成された解析センサであることを特徴とする請求項1記載のORC発電設備。
【請求項4】
前記解析センサが、巻線内の残留磁界を測定するように構成されたセンサであることを特徴とする請求項3記載のORC発電設備。
【請求項5】
前記解析センサが、振動スペクトルを測定するように構成されたセンサであることを特徴とする請求項3記載のORC発電設備。
【請求項6】
ORC発電設備を制御可能に始動する方法であって、
可変速ポンプ(120)と、前記ORC発電設備のモータ発電機(150)と機械的に連通するタービン(140)と、を備える作動流体用循環経路を備える前記ORC発電設備において、前記モータ発電機(150)が電力送電線網(170)から切断されている間に前記ORC発電設備を始動するステップと、
前記可変速ポンプ(120)の動作を制御して前記タービン(140)を駆動し、それによって、前記モータ発電機(150)を駆動するステップと、
前記モータ発電機(150)の回転速度を測定するステップと、
前記モータ発電機(150)の回転速度が、前記電力送電線網(170)から電力を直接供給されている場合の前記モータ発電機(150)の定常状態速度にほぼ等しい速度に達したら、前記モータ発電機を前記電力送電線網に、切り換え可能に、直接接続し、それによって、前記ORC発電設備の定常状態動作を達成するステップと、
を含むことを特徴とする方法。
【請求項7】
前記モータ発電機(150)の回転速度を測定する前記ステップが、回転速度が抽出される基になる、振動スペクトルのピークを探すことを含むことを特徴とする請求項6記載のORC発電設備を制御可能に始動する方法。
【請求項8】
前記モータ発電機(150)の回転速度を測定する前記ステップが、前記モータ発電機(150)の回転子巻線内の残留磁気を測定することを含むことを特徴とする請求項6記載のORC発電設備を制御可能に始動する方法。
【請求項9】
前記ORC発電機を前記送電線網(170)に接続する前に、前記可変速ポンプ(120)を用いて回転速度を制御することを特徴とすることを特徴とする請求項6記載のORC発電設備を制御可能に始動する方法。
【請求項10】
前記ポンプ(120)の速度が上がると、前記回転速度が上がることを特徴とする請求項9記載のORC発電設備を制御可能に始動する方法。
【請求項11】
前記ポンプ(120)の速度が下がると、前記回転速度が下がることを特徴とする請求項9記載のORC発電設備を制御可能に始動する方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2007−536457(P2007−536457A)
【公表日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2007−511669(P2007−511669)
【出願日】平成17年5月6日(2005.5.6)
【国際出願番号】PCT/US2005/016009
【国際公開番号】WO2005/108749
【国際公開日】平成17年11月17日(2005.11.17)
【出願人】(590005449)ユナイテッド テクノロジーズ コーポレイション (581)
【氏名又は名称原語表記】UNITED TECHNOLOGIES CORPORATION
【Fターム(参考)】
【公表日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成17年5月6日(2005.5.6)
【国際出願番号】PCT/US2005/016009
【国際公開番号】WO2005/108749
【国際公開日】平成17年11月17日(2005.11.17)
【出願人】(590005449)ユナイテッド テクノロジーズ コーポレイション (581)
【氏名又は名称原語表記】UNITED TECHNOLOGIES CORPORATION
【Fターム(参考)】
[ Back to top ]