
PET−MRI装置

【課題】PET検出器の影響によるMR画像の画質劣化を抑えることが可能なPET−MRI装置を実現する。
【解決手段】実施形態のPET−MRI装置100において、連続した構造物である静磁場磁石1は、円筒状のボア内に静磁場を発生させる。また、第1の検出部13a及び第2の検出部13bは、リング状に形成され、被検体に投与された陽電子放出核種から放出されるガンマ線を検出する。そして、第1の検出部13aと前記第2の検出部13bとは、前記静磁場の磁場中心を挟むように前記ボアの軸方向に間隔を開けて配置される。
【解決手段】実施形態のPET−MRI装置100において、連続した構造物である静磁場磁石1は、円筒状のボア内に静磁場を発生させる。また、第1の検出部13a及び第2の検出部13bは、リング状に形成され、被検体に投与された陽電子放出核種から放出されるガンマ線を検出する。そして、第1の検出部13aと前記第2の検出部13bとは、前記静磁場の磁場中心を挟むように前記ボアの軸方向に間隔を開けて配置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施の形態は、PET(Positron Emission Tomography)−MRI(Magnetic Resonance Imaging)装置に関する。
【背景技術】
【0002】
従来、頭部などの検査では、MRI装置が利用される場合が多い。また、頭部の検査、例えばアルツハイマー病の診断にPET装置を利用することが期待されている。このことから、近年では、PET装置とMRI装置とを組み合わせたPET−MRI装置の実現が期待されている。
【0003】
しかし、MRI装置では強い高周波磁場が用いられるため、PET−MRI装置を実現する場合に、従来のPET装置で検出器に用いられていた光電子増倍管(Photomultiplier Tube:PMT)を使用できないなどの制約があった。そこで、例えば、PMTの替わりにAPD(Avalanche Photodiode)素子やiPM(Silicon Photomultiplier)などを用いたPET−MRI装置が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2008−525161号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のPET−MRI装置では、MR画像の有効撮像領域である磁場中心にPET検出器が配置される場合があった。このような配置は、PET画像を撮像するという観点では最適である。しかし、MR画像を撮像するという観点では、磁場中心に設置されたPET検出器の材料の影響で十分な画質のMR画像が得られない場合があり、必ずしも最適ではなかった。
【課題を解決するための手段】
【0006】
実施形態のPET−MRI装置は、静磁場磁石と、送信用高周波コイルと、受信用高周波コイルと、MR画像再構成部と、第1の検出部と、第2の検出部と、PET画像再構成部とを備える。連続した構造物である静磁場磁石は、円筒状のボア内に静磁場を発生させる。送信用高周波コイルは、前記静磁場内に置かれた被検体に高周波パルスを印加する。傾斜磁場コイルは、前記高周波パルスが印加された前記被検体に傾斜磁場を印加する。受信用高周波コイルは、前記高周波パルス及び前記傾斜磁場の印加により前記被検体から発せられる磁気共鳴信号を検出する。MR画像再構成部は、前記受信用高周波コイルにより検出された磁気共鳴信号に基づいてMR画像を再構成する。第1の検出部及び第2の検出部は、リング状に形成され、前記被検体に投与された陽電子放出核種から放出されるガンマ線を検出する。PET画像再構成部は、前記第1の検出部及び前記第2の検出部により検出されたガンマ線に基づいて生成された投影データからPET画像を再構成する。そして、前記第1の検出部と前記第2の検出部とは、前記静磁場の磁場中心を挟むように前記ボアの軸方向に間隔を開けて配置される。
【図面の簡単な説明】
【0007】
【図1】図1は、本実施例1に係るPET−MRI装置の構成を示す図である。
【図2】図2は、本実施例1に係るPET検出器の周辺における各部の配置を示す図である。
【図3】図3は、本実施例1に係るPET検出器の周辺におけるボアの軸方向に見た場合の各部の配置を示す図である。
【図4】図4は、本実施例1に係る振動緩衝機構を示す図である。
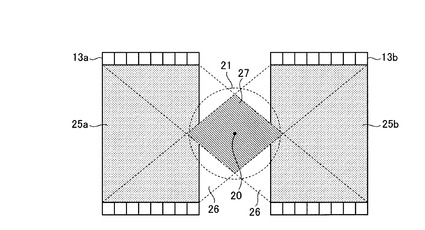
【図5】図5は、本実施例1に係るPET−MRI装置における有効撮像領域を示す図である。
【図6】図6は、本実施例2に係るPET検出器の周辺における各部の配置を示す図である。
【図7】図7は、本実施例3に係るステップ・アンド・シュートを説明するための図である。
【発明を実施するための形態】
【0008】
以下に、図面を参照して、本実施形態に係るPET−MRI装置について詳細に説明する。
【実施例1】
【0009】
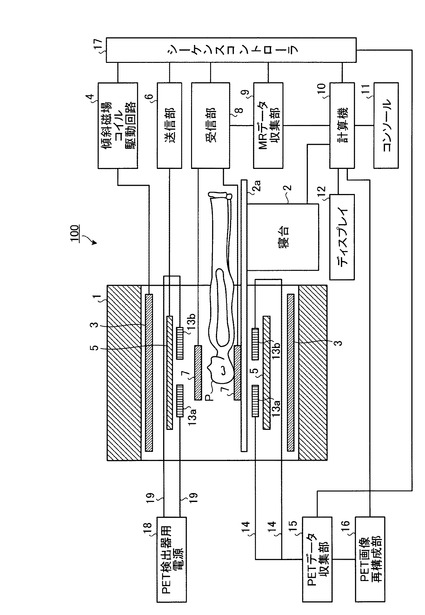
まず、本実施例1に係るPET−MRI装置の構成について説明する。図1は、本実施例1に係るPET−MRI装置100の構成を示す図である。図1に示すように、このPET−MRI装置100は、静磁場磁石1、寝台2、傾斜磁場コイル3、傾斜磁場コイル駆動回路4、送信用高周波コイル5、送信部6、受信用高周波コイル7、受信部8、MRデータ収集部9、計算機10、コンソール11、ディスプレイ12、PET検出器13a及び13b、信号線14、PETデータ収集部15、PET画像再構成部16、シーケンスコントローラ17、PET検出器用電源18、及び電源ケーブル19を有する。
【0010】
連続した構造物である静磁場磁石1は、略円筒状のボア内に静磁場を発生させる。ここで、ボアは、静磁場磁石1や傾斜磁場コイル3などを収容する略円筒状の架台の内壁として形成される。寝台2は、被検体Pが載せられる天板2aを有する。この寝台2は、撮像時には、天板2aをボア内へ移動することで、被検体Pを静磁場内に移動する。
【0011】
傾斜磁場コイル3は、被検体Pに対して、静磁場と同一方向(Z方向)の磁場強度が磁場中心からのX,Y,Z方向の距離に対して直線的に変化する傾斜磁場Gx,Gy,Gzを印加する。この傾斜磁場コイル3は、略円筒状に形成され、静磁場磁石1の内周側に配置される。傾斜磁場コイル駆動回路4は、シーケンスコントローラ17による制御のもと、傾斜磁場コイル3を駆動する。
【0012】
送信用高周波コイル5は、送信部6から送信される高周波パルスに基づいて、静磁場内に置かれた被検体Pに高周波磁場を印加する。この送信用高周波コイル5は、略円筒状に形成され、傾斜磁場コイル3の内周側に配置される。送信部6は、シーケンスコントローラ17による制御のもと、送信用高周波コイル5に高周波パルスを送信する。
【0013】
受信用高周波コイル7は、高周波磁場及び傾斜磁場の印加により被検体Pから発せられる磁気共鳴信号を検出する。例えば、受信用高周波コイル7は、撮像対象の部位に応じて被検体Pの表面に配置される表面コイルである。例えば、被検体Pの体部が撮像される場合には、2つの受信用高周波コイル7が被検体の上部及び下部に配置される。受信部8は、シーケンスコントローラ17による制御のもと、受信用高周波コイル7によって検出された磁気共鳴信号を受信する。そして、受信部8は、受信した磁気共鳴信号をMRデータ収集部9に送る。
【0014】
MRデータ収集部9は、シーケンスコントローラ17による制御のもと、受信部8から送られた磁気共鳴信号を収集する。そして、MRデータ収集部9は、収集した磁気共鳴信号を増幅及び検波した後にA/D変換し、計算機10に送る。計算機10は、コンソール11により制御され、MRデータ収集部9から送られた磁気共鳴信号に基づいてMR画像を再構成する。そして、計算機10は、再構成したMR画像をディスプレイ12に表示させる。
【0015】
PET検出器13a及び13bは、被検体Pに投与された陽電子放出核種から放出されるガンマ線を計数情報として検出する。これらPET検出器13a及び13bは、リング状に形成され、送信用高周波コイル5の内周側に配置される。例えば、PET検出器13a及び13bは、シンチレータと光検出器とを有する検出器モジュールをリング状に配置することで形成される。ここで、シンチレータは、例えば、LYSO(Lutetium Yttrium Oxyorthosilicate)、LSO(Lutetium Oxyorthosilicate)、LGSO(Lutetium Gadolinium Oxyorthosilicate)などである。また、光検出器は、例えば、APD(Avalanche Photodiode)素子やSiPM(Silicon Photomultiplier)などの半導体検出器である。そして、PET検出器13a及び13bは、検出した計数情報を、信号線14を介してPETデータ収集部15に送る。
【0016】
PETデータ収集部15は、シーケンスコントローラ17による制御のもと、同時計数情報を生成する。このPETデータ収集部15は、PET検出器13a及び13bによって検出されたガンマ線の計数情報を用いて、陽電子放出核種から放出されたガンマ線(消滅放射線を含む)を略同時に検出した計数情報の組み合わせを同時計数情報として生成する。
【0017】
PET画像再構成部16は、PETデータ収集部15により生成された同時計数情報を投影データとしてPET画像を再構成する。このPET画像再構成部16によって再構成されたPET画像は、計算機10に送信されてディスプレイ12に表示される。シーケンスコントローラ17は、撮像時に実行される各種撮像シーケンスに基づいて、上述した各部を制御する。PET検出器用電源18は、電源ケーブル19を介して、光検出器を駆動するための電力をPET検出器13a及び13bに供給する。
【0018】
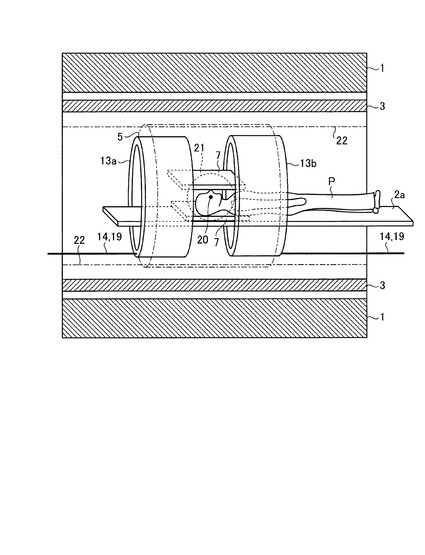
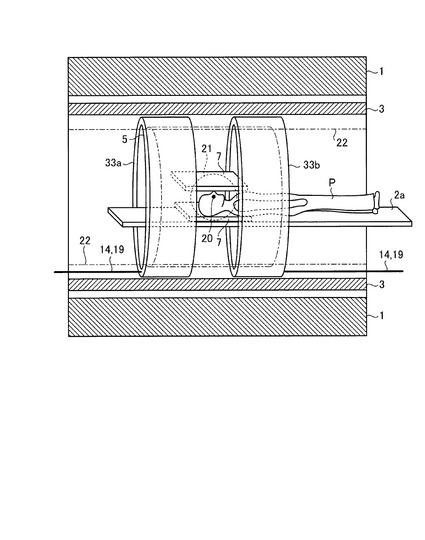
次に、PET検出器13a及び13bの周辺における各部の配置について説明する。図2は、本実施例1に係るPET検出器13a及び13bの周辺における各部の配置を示す図である。なお、図2に示す点20は、静磁場の磁場中心を示している。また、図2に示す点線で囲まれた領域21は、MR画像の有効撮像領域を示している。
【0019】
図2に示すように、本実施例1では、PET検出器13a及び13bは、ボア22の内周側に配置される。そして、PET検出器13aとPET検出器13bとは、静磁場磁石1によって発生する静磁場の磁場中心20を挟むように、ボア22の軸方向に間隔を開けて配置される。すなわち、本実施例1では、MR画像の撮像有効領域となる磁場中心の周辺を避けて、PET検出器13a及び13bが配置される。これにより、PET検出器の影響によるMR画像の画質劣化が抑えられる。
【0020】
また、PET検出器13a及び13bに接続される信号線14及び電源ケーブル19は、静磁場磁石1により発生する静磁場の磁場中心20の周辺を通過しないように配線される。例えば、図2に示すように、PET検出器13aに接続される信号線14及び電源ケーブル19は1本にまとめられ、PET検出器13aから磁場中心20とは逆の側に配線される。同様に、PET検出器13bに接続される信号線14及び電源ケーブル19は1本にまとめられ、PET検出器13bから磁場中心20とは逆の側に配線される。なお、信号線14及び電源ケーブル19は、例えば、送信用高周波コイル5に接続されるケーブルと1本にまとめられて配線されてもよい。
【0021】
また、PET検出器13a及び13bは、検出したガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに光信号に変換して出力する。なお、PET検出器13a及び13bは、検出した前記ガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに無線信号に変換して出力してもよい。このように、PET検出器13a及び13bから出力される信号を光信号又は無線信号に変換することによって、デジタル信号により生じるノイズを防ぐことができる。
【0022】
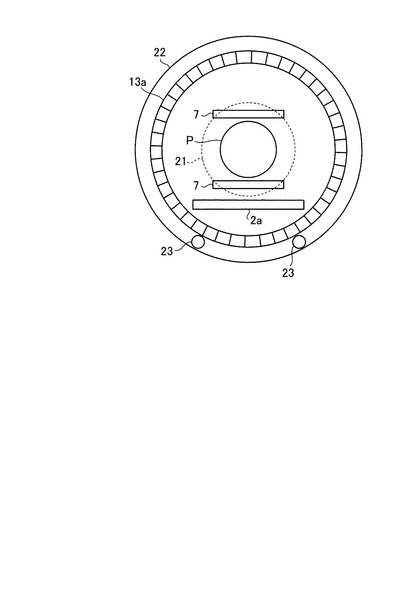
また、PET−MRI装置100は、ボア22の軸方向に沿ってPET検出器13a及び13bを移動する移動機構を有する。図3は、本実施例1に係るPET検出器13a及び13bの周辺におけるボア22の軸方向に見た場合の各部の配置を示す図である。この図3は、PET検出器13aが配置された側の開口部からボア内を見た場合の各部の配置を示している。
【0023】
図3に示すように、例えば、移動機構23は、ボア22の下側の内壁面に設置された2本のレールである。この移動機構23は、例えば、PET検出器13aの外周面に形成された溝状に形成されたレール受け部に嵌合し、PET検出器13aをボア22の軸方向に沿って移動可能に支持する。なお、PET検出器13bの側にも同様に、PET検出器13bを移動するための移動機構23が設けられる。
【0024】
ここで、PET検出器13a及び13bは、それぞれ移動機構23から着脱可能であり、ボア22の両側から挿入したり取り出したりすることができる。このように、PET検出器13a及び13bを着脱可能な構造にすることで、従来のMRI装置に組込むことが比較的容易となり、広く普及が図れる。
【0025】
そして、移動機構23は、計算機10による制御のもと、撮像モードに応じてPET検出器13a及び13bを移動する。例えば、移動機構23は、計算機10が操作者から受け付けた撮像条件に基づいて、PET検出器13a及び13bを自動的に移動する。または、移動機構23は、コンソール11を介して操作者から入力された移動指示に応じて、PET検出器13a及び13bを移動してもよい。
【0026】
具体的な例として、例えば、移動機構23は、PET画像及びMRI画像を同時に撮像する撮像モードが実行される場合には、撮像開始前に、PET検出器13a及び13bを静磁場の磁場中心20を挟む位置に移動する。また、例えば、移動機構23は、PET画像のみを撮像する撮像モードが実行される場合には、撮像開始前に、PET検出器13a及び13bを隣接させるように移動する。また、例えば、移動機構23は、MR画像のみを撮像する撮像モードが実行される場合には、PET検出器13a及び13bを静磁場の外へ移動する。
【0027】
また、例えば、移動機構23は、PET画像を撮像する撮像条件及び/又はMRI画像を撮像する撮像条件に応じて、PET検出器13a及び13bを移動する。例えば、移動機構23は、PET検出器13a及び13bを移動する際に、MR画像の撮像条件として設定されるFOV(Field Of View)の大きさや受信用高周波コイル7の種類に応じて、移動後の各PET検出器の間隔を変化させる。
【0028】
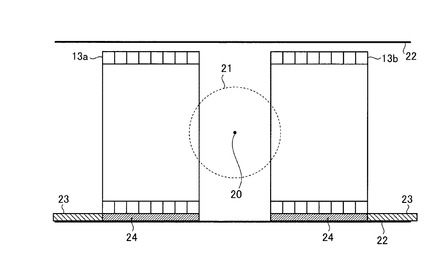
また、PET−MRI装置100は、移動機構23によってPET検出器13a及び13bが撮像用の位置に移動された後に、各PET検出器の位置を固定するとともに、傾斜磁場コイル3から各PET検出器に伝わる振動を緩和する振動緩衝機構を有する。図4は、本実施例1に係る振動緩衝機構24を示す図である。図4に示すように、例えば、振動緩衝機構24は、PET検出器13aと移動機構23との嵌合部に設けられる。また、PET検出器13bと移動機構23との嵌合部にも同様に振動緩衝機構24が設けられる。
【0029】
次に、本実施例1に係るPET−MRI装置100における有効撮像領域について説明する。図5は、本実施例1に係るPET−MRI装置100における有効撮像領域を示す図である。図5に示すように、PET−MRI装置100では、PET検出器13aの内周面で囲まれた領域25aと、PET検出器13bの内周面で囲まれた領域25bとが、それぞれPET画像のみを撮像可能な有効撮像領域となる。
【0030】
さらに、図5に示すように、PET検出器13aの内周面とPET検出器13bの内周面との間に形成される領域26及びMR画像の有効撮像領域21の両方に含まれる領域27が、PET画像及びMR画像を同時に撮像可能な有効撮像領域となる。この有効撮像領域27は、円錐の底面を張り合わせた形状になる。
【0031】
このように、本実施例1に係るPET−MRI装置100では、MRI画像を撮像可能な有効撮像領域21、PET画像を撮像可能な有効撮像領域25a及び25bがそれぞれ設定され、さらに、MRI画像及びPET画像を同時に撮像可能な有効撮像領域27が設定される。
【0032】
上述したように、本実施例1に係るPET−MRI装置100は、静磁場磁石1と、送信用高周波コイル5と、傾斜磁場コイル3と、受信用高周波コイル7と、計算機10と、PET検出器13a及び13bと、PET画像再構成部16とを備える。連続した構造物である静磁場磁石1は、円筒状のボア22内に静磁場を発生させる。送信用高周波コイル5は、静磁場内に置かれた被検体Pに高周波パルスを印加する。傾斜磁場コイル3は、高周波パルスが印加された被検体Pに傾斜磁場を印加する。受信用高周波コイル7は、高周波パルス及び傾斜磁場の印加により被検体Pから発せられる磁気共鳴信号を検出する。計算機10は、受信用高周波コイル7により検出された磁気共鳴信号に基づいてMR画像を再構成する。PET検出器13a及び13bは、リング状に形成され、被検体Pに投与された陽電子放出核種から放出されるガンマ線を検出する。PET画像再構成部16は、PET検出器13a及び13bにより検出されたガンマ線に基づいて生成された投影データからPET画像を再構成する。そして、PET検出器13aとPET検出器13bとは、静磁場の磁場中心20を挟むようにボア22の軸方向に間隔を開けて配置される。このように、本実施例1では、MR画像の撮像有効領域となる磁場中心の周辺を避けて、PET検出器13a及び13bが配置される。したがって、本実施例1によれば、PET検出器の影響によるMR画像の画質劣化を抑えることができる。
【0033】
また、本実施例1では、PET検出器13a及び13bが、送信用高周波コイル5の内周側に設けられる。これにより、送信用高周波コイル5の内周側に撮像用の空間を有する従来のMRI装置に対して、PET検出器13a及び13bを容易に追加することができるので、PET−MRI装置を容易に実現することができる。
【0034】
また、本実施例1では、移動機構23が、撮像モードに応じて、ボア22の軸方向に沿ってPET検出器13a及び13bを移動する。これにより、PET画像及びMRI画像の両方又は一方が撮像される場合に、実施される撮像の種類に応じて、PET検出器13a及び13bを適切な位置に移動することができる。
【0035】
また、本実施例1では、移動機構23が、PET画像及びMRI画像を同時に撮像する撮像モードが実行される場合には、撮像開始前にPET検出器13a及び13bを静磁場の磁場中心20を挟む位置に移動する。これにより、PET画像及びMRI画像が同時に撮像される場合に、高画質のMR画像を容易に撮像することができる。
【0036】
また、本実施例1では、移動機構23が、PET画像のみを撮像する撮像モードが実行される場合には、撮像開始前にPET検出器13a及び13bを隣接させるように移動する。これにより、PET画像のみが撮像される場合に、広い撮像領域を確保することができる。
【0037】
また、本実施例1では、移動機構23が、MR画像のみを撮像する撮像モードが実行される場合には、PET検出器13a及び13bを静磁場の外へ移動する。これにより、MR画像のみが撮像される場合に、PET検出器13a及び13bによる画質劣化が無いMR画像を得ることができる。
【0038】
また、本実施例1では、移動機構23が、PET画像を撮像する撮像条件及び/又はMRI画像を撮像する撮像条件に応じて、PET検出器13a及び13bを移動する。これにより、PET画像及びMR画像の両方又は一方が撮像される場合に、PET検出器13aとPET検出器13bとの間隔を自動的に設定することができる。
【0039】
また、本実施例1では、振動緩衝機構24が、移動機構23によってPET検出器13a及び13bが撮像用の位置に移動された後に、各PET検出器の位置を固定するとともに、傾斜磁場コイル3から各PET検出器に伝わる振動を緩和する。これにより、傾斜磁場コイル3によって生じる機械振動からPET検出器13a及び13bを保護することができる。
【0040】
また、本実施例1では、PET検出器13a及び13bに接続される信号線14及び電源ケーブル19が、静磁場の磁場中心20の周辺を通過しないように配線される。これにより、PET検出器13a及び13bから出力される信号により生じるノイズを抑えることができる。
【0041】
また、本実施例1では、PET検出器13a及び13bが、検出したガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに光信号に変換して出力する。これにより、PET検出器13a及び13bから出力される信号により生じるノイズをより確実に抑えることができる。
【0042】
また、本実施例1では、PET検出器13a及び13bが、検出したガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに無線信号に変換して出力する。これにより、PET検出器13a及び13bから出力される信号により生じるノイズをより確実に抑えることができる。
【実施例2】
【0043】
次に、実施例2について説明する。実施例1では、PET検出器13a及び13bが送信用高周波コイル5の内周側に設けられる場合について説明した。これに対し、実施例2では、PET検出器33a及び33bが送信用高周波コイル5の外周側に設けられる場合について説明する。なお、本実施例2に係るPET−MRI装置の基本的な構成は図1に示したものと同じであり、PET検出器33a及び33bの配置のみが異なる。
【0044】
図6は、本実施例2に係るPET検出器33a及び33bの周辺における各部の配置を示す図である。なお、ここでは、図2に示した各部と同じ機能を果たす部については、同じ符号を付すこととして詳細な説明を省略する。図6に示すように、本実施例2では、PET検出器33a及び33bは、送信用高周波コイル5の外周側に設けられる。この構成は、例えば、体部を撮像する場合に全身用送信用RFコイルを送信用高周波コイル5とし、体部専用の表面コイルを受信用高周波コイル7とする場合などに用いられる。
【0045】
この構成では、例えば、PET検出器33a及び33bは、静磁場の磁場中心を挟む位置に固定された状態で設けられる。ここで、PET検出器33a及び33bは、実施例1と同様に、傾斜磁場コイル3により生じる振動を緩和する振動緩衝機構を介して、装置に固定されてもよい。例えば、PET検出器33a及び33bは、傾斜磁場コイル3の内周面に振動緩衝機構を介して固定される。これにより、本実施例2でも、傾斜磁場コイル3によって生じる機械振動からPET検出器33a及び33bを保護することができる。
【0046】
このように、本実施例2でも、MR画像の撮像有効領域となる磁場中心の周辺を避けて、PET検出器33a及び33bが配置される。したがって、本実施例2によれば、実施例1と同様に、PET検出器の影響によるMR画像の画質劣化を抑えることができる。
【実施例3】
【0047】
次に、実施例3について説明する。実施例3では、上記実施例1又は2で説明したPET−MRI装置において、被検体Pが置かれた天板2aをボア22内の軸方向に段階的に移動しながら撮像を繰り返す場合について説明する。このような撮像法は、ステップ・アンド・シュートと呼ばれる。なお、ここでは、実施例1で説明したPET−MRI装置においてステップ・アンド・シュートが行われる場合について説明する。
【0048】
図7は、本実施例3に係るステップ・アンド・シュートを説明するための図である。本実施例3に係るステップ・アンド・シュートでは、寝台2が、天板2aを移動させることで、ボア22の軸方向に沿って被検体Pを移動する。また、計算機10が、PET検出器13bの略中心位置、PET検出器13aとPET検出器13bとの間に挟まれた領域の略中心位置、PET検出器13aの略中心位置の順で被検体Pの撮像部位が段階的に移動するように、寝台2を制御する。
【0049】
これにより、図7に示すように、被検体Pの撮像位置に付けられた受信用高周波コイル7が段階的に移動する。具体的には、受信用高周波コイル7は、ボア22の軸方向に、PET検出器13aの中心とPET検出器13bの中心との間隔の半分の距離dだけ段階的に移動する。この結果、撮像部位は、ボア22の軸方向に、PET画像のみが撮像可能な範囲41、MRI画像及びPET画像を同時に撮像可能な範囲42、及び、PET画像のみが撮像可能な範囲41に順に移動することになる。
【0050】
そして、例えば、計算機10は、撮像部位がPET検出器13aの略中心位置、又は、PET検出器13bの略中心位置に移動した際には、PET画像を撮像するようにPET−MRI装置100を制御する。また、計算機10は、撮像部位がPET検出器13aとPET検出器13bとの間に挟まれた領域の略中心位置に移動した際には、PET画像及びMRI画像の両方又は一方を撮像するようにPET−MRI装置100を制御する。これにより、撮像部位を段階的に移動しながら、PET画像と、MR画像及びPET画像の両方又は一方とを順に撮像することができる。かかる実施例3でも、実施例1及び2と同様に、PET検出器の影響によるMR画像の画質劣化が抑えられる。
【0051】
なお、上記実施例1〜3では、2つのPET検出器13a及び13bが配置される場合について説明した。しかし、PET−MRI装置の実施形態はこれに限られない。例えば、PET検出器の数は3つ以上であってもよい。すなわち、3つ以上のPET検出器13a及び13bが配置された場合でも、各PET検出器の間に挟まれる領域において、PET画像とMR画像とを同時に撮像することができる。
【0052】
以上のように、実施例1、2又は3によれば、PET検出器の影響によるMR画像の画質劣化を抑えることが可能なPET−MRI装置を実現することができる。
【0053】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0054】
1 静磁場磁石
5 送信用高周波コイル
3 傾斜磁場コイル
7 受信用高周波コイル
10 計算機
13a,13b PET検出器
16 PET画像再構成部
【技術分野】
【0001】
本発明の実施の形態は、PET(Positron Emission Tomography)−MRI(Magnetic Resonance Imaging)装置に関する。
【背景技術】
【0002】
従来、頭部などの検査では、MRI装置が利用される場合が多い。また、頭部の検査、例えばアルツハイマー病の診断にPET装置を利用することが期待されている。このことから、近年では、PET装置とMRI装置とを組み合わせたPET−MRI装置の実現が期待されている。
【0003】
しかし、MRI装置では強い高周波磁場が用いられるため、PET−MRI装置を実現する場合に、従来のPET装置で検出器に用いられていた光電子増倍管(Photomultiplier Tube:PMT)を使用できないなどの制約があった。そこで、例えば、PMTの替わりにAPD(Avalanche Photodiode)素子やiPM(Silicon Photomultiplier)などを用いたPET−MRI装置が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2008−525161号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のPET−MRI装置では、MR画像の有効撮像領域である磁場中心にPET検出器が配置される場合があった。このような配置は、PET画像を撮像するという観点では最適である。しかし、MR画像を撮像するという観点では、磁場中心に設置されたPET検出器の材料の影響で十分な画質のMR画像が得られない場合があり、必ずしも最適ではなかった。
【課題を解決するための手段】
【0006】
実施形態のPET−MRI装置は、静磁場磁石と、送信用高周波コイルと、受信用高周波コイルと、MR画像再構成部と、第1の検出部と、第2の検出部と、PET画像再構成部とを備える。連続した構造物である静磁場磁石は、円筒状のボア内に静磁場を発生させる。送信用高周波コイルは、前記静磁場内に置かれた被検体に高周波パルスを印加する。傾斜磁場コイルは、前記高周波パルスが印加された前記被検体に傾斜磁場を印加する。受信用高周波コイルは、前記高周波パルス及び前記傾斜磁場の印加により前記被検体から発せられる磁気共鳴信号を検出する。MR画像再構成部は、前記受信用高周波コイルにより検出された磁気共鳴信号に基づいてMR画像を再構成する。第1の検出部及び第2の検出部は、リング状に形成され、前記被検体に投与された陽電子放出核種から放出されるガンマ線を検出する。PET画像再構成部は、前記第1の検出部及び前記第2の検出部により検出されたガンマ線に基づいて生成された投影データからPET画像を再構成する。そして、前記第1の検出部と前記第2の検出部とは、前記静磁場の磁場中心を挟むように前記ボアの軸方向に間隔を開けて配置される。
【図面の簡単な説明】
【0007】
【図1】図1は、本実施例1に係るPET−MRI装置の構成を示す図である。
【図2】図2は、本実施例1に係るPET検出器の周辺における各部の配置を示す図である。
【図3】図3は、本実施例1に係るPET検出器の周辺におけるボアの軸方向に見た場合の各部の配置を示す図である。
【図4】図4は、本実施例1に係る振動緩衝機構を示す図である。
【図5】図5は、本実施例1に係るPET−MRI装置における有効撮像領域を示す図である。
【図6】図6は、本実施例2に係るPET検出器の周辺における各部の配置を示す図である。
【図7】図7は、本実施例3に係るステップ・アンド・シュートを説明するための図である。
【発明を実施するための形態】
【0008】
以下に、図面を参照して、本実施形態に係るPET−MRI装置について詳細に説明する。
【実施例1】
【0009】
まず、本実施例1に係るPET−MRI装置の構成について説明する。図1は、本実施例1に係るPET−MRI装置100の構成を示す図である。図1に示すように、このPET−MRI装置100は、静磁場磁石1、寝台2、傾斜磁場コイル3、傾斜磁場コイル駆動回路4、送信用高周波コイル5、送信部6、受信用高周波コイル7、受信部8、MRデータ収集部9、計算機10、コンソール11、ディスプレイ12、PET検出器13a及び13b、信号線14、PETデータ収集部15、PET画像再構成部16、シーケンスコントローラ17、PET検出器用電源18、及び電源ケーブル19を有する。
【0010】
連続した構造物である静磁場磁石1は、略円筒状のボア内に静磁場を発生させる。ここで、ボアは、静磁場磁石1や傾斜磁場コイル3などを収容する略円筒状の架台の内壁として形成される。寝台2は、被検体Pが載せられる天板2aを有する。この寝台2は、撮像時には、天板2aをボア内へ移動することで、被検体Pを静磁場内に移動する。
【0011】
傾斜磁場コイル3は、被検体Pに対して、静磁場と同一方向(Z方向)の磁場強度が磁場中心からのX,Y,Z方向の距離に対して直線的に変化する傾斜磁場Gx,Gy,Gzを印加する。この傾斜磁場コイル3は、略円筒状に形成され、静磁場磁石1の内周側に配置される。傾斜磁場コイル駆動回路4は、シーケンスコントローラ17による制御のもと、傾斜磁場コイル3を駆動する。
【0012】
送信用高周波コイル5は、送信部6から送信される高周波パルスに基づいて、静磁場内に置かれた被検体Pに高周波磁場を印加する。この送信用高周波コイル5は、略円筒状に形成され、傾斜磁場コイル3の内周側に配置される。送信部6は、シーケンスコントローラ17による制御のもと、送信用高周波コイル5に高周波パルスを送信する。
【0013】
受信用高周波コイル7は、高周波磁場及び傾斜磁場の印加により被検体Pから発せられる磁気共鳴信号を検出する。例えば、受信用高周波コイル7は、撮像対象の部位に応じて被検体Pの表面に配置される表面コイルである。例えば、被検体Pの体部が撮像される場合には、2つの受信用高周波コイル7が被検体の上部及び下部に配置される。受信部8は、シーケンスコントローラ17による制御のもと、受信用高周波コイル7によって検出された磁気共鳴信号を受信する。そして、受信部8は、受信した磁気共鳴信号をMRデータ収集部9に送る。
【0014】
MRデータ収集部9は、シーケンスコントローラ17による制御のもと、受信部8から送られた磁気共鳴信号を収集する。そして、MRデータ収集部9は、収集した磁気共鳴信号を増幅及び検波した後にA/D変換し、計算機10に送る。計算機10は、コンソール11により制御され、MRデータ収集部9から送られた磁気共鳴信号に基づいてMR画像を再構成する。そして、計算機10は、再構成したMR画像をディスプレイ12に表示させる。
【0015】
PET検出器13a及び13bは、被検体Pに投与された陽電子放出核種から放出されるガンマ線を計数情報として検出する。これらPET検出器13a及び13bは、リング状に形成され、送信用高周波コイル5の内周側に配置される。例えば、PET検出器13a及び13bは、シンチレータと光検出器とを有する検出器モジュールをリング状に配置することで形成される。ここで、シンチレータは、例えば、LYSO(Lutetium Yttrium Oxyorthosilicate)、LSO(Lutetium Oxyorthosilicate)、LGSO(Lutetium Gadolinium Oxyorthosilicate)などである。また、光検出器は、例えば、APD(Avalanche Photodiode)素子やSiPM(Silicon Photomultiplier)などの半導体検出器である。そして、PET検出器13a及び13bは、検出した計数情報を、信号線14を介してPETデータ収集部15に送る。
【0016】
PETデータ収集部15は、シーケンスコントローラ17による制御のもと、同時計数情報を生成する。このPETデータ収集部15は、PET検出器13a及び13bによって検出されたガンマ線の計数情報を用いて、陽電子放出核種から放出されたガンマ線(消滅放射線を含む)を略同時に検出した計数情報の組み合わせを同時計数情報として生成する。
【0017】
PET画像再構成部16は、PETデータ収集部15により生成された同時計数情報を投影データとしてPET画像を再構成する。このPET画像再構成部16によって再構成されたPET画像は、計算機10に送信されてディスプレイ12に表示される。シーケンスコントローラ17は、撮像時に実行される各種撮像シーケンスに基づいて、上述した各部を制御する。PET検出器用電源18は、電源ケーブル19を介して、光検出器を駆動するための電力をPET検出器13a及び13bに供給する。
【0018】
次に、PET検出器13a及び13bの周辺における各部の配置について説明する。図2は、本実施例1に係るPET検出器13a及び13bの周辺における各部の配置を示す図である。なお、図2に示す点20は、静磁場の磁場中心を示している。また、図2に示す点線で囲まれた領域21は、MR画像の有効撮像領域を示している。
【0019】
図2に示すように、本実施例1では、PET検出器13a及び13bは、ボア22の内周側に配置される。そして、PET検出器13aとPET検出器13bとは、静磁場磁石1によって発生する静磁場の磁場中心20を挟むように、ボア22の軸方向に間隔を開けて配置される。すなわち、本実施例1では、MR画像の撮像有効領域となる磁場中心の周辺を避けて、PET検出器13a及び13bが配置される。これにより、PET検出器の影響によるMR画像の画質劣化が抑えられる。
【0020】
また、PET検出器13a及び13bに接続される信号線14及び電源ケーブル19は、静磁場磁石1により発生する静磁場の磁場中心20の周辺を通過しないように配線される。例えば、図2に示すように、PET検出器13aに接続される信号線14及び電源ケーブル19は1本にまとめられ、PET検出器13aから磁場中心20とは逆の側に配線される。同様に、PET検出器13bに接続される信号線14及び電源ケーブル19は1本にまとめられ、PET検出器13bから磁場中心20とは逆の側に配線される。なお、信号線14及び電源ケーブル19は、例えば、送信用高周波コイル5に接続されるケーブルと1本にまとめられて配線されてもよい。
【0021】
また、PET検出器13a及び13bは、検出したガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに光信号に変換して出力する。なお、PET検出器13a及び13bは、検出した前記ガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに無線信号に変換して出力してもよい。このように、PET検出器13a及び13bから出力される信号を光信号又は無線信号に変換することによって、デジタル信号により生じるノイズを防ぐことができる。
【0022】
また、PET−MRI装置100は、ボア22の軸方向に沿ってPET検出器13a及び13bを移動する移動機構を有する。図3は、本実施例1に係るPET検出器13a及び13bの周辺におけるボア22の軸方向に見た場合の各部の配置を示す図である。この図3は、PET検出器13aが配置された側の開口部からボア内を見た場合の各部の配置を示している。
【0023】
図3に示すように、例えば、移動機構23は、ボア22の下側の内壁面に設置された2本のレールである。この移動機構23は、例えば、PET検出器13aの外周面に形成された溝状に形成されたレール受け部に嵌合し、PET検出器13aをボア22の軸方向に沿って移動可能に支持する。なお、PET検出器13bの側にも同様に、PET検出器13bを移動するための移動機構23が設けられる。
【0024】
ここで、PET検出器13a及び13bは、それぞれ移動機構23から着脱可能であり、ボア22の両側から挿入したり取り出したりすることができる。このように、PET検出器13a及び13bを着脱可能な構造にすることで、従来のMRI装置に組込むことが比較的容易となり、広く普及が図れる。
【0025】
そして、移動機構23は、計算機10による制御のもと、撮像モードに応じてPET検出器13a及び13bを移動する。例えば、移動機構23は、計算機10が操作者から受け付けた撮像条件に基づいて、PET検出器13a及び13bを自動的に移動する。または、移動機構23は、コンソール11を介して操作者から入力された移動指示に応じて、PET検出器13a及び13bを移動してもよい。
【0026】
具体的な例として、例えば、移動機構23は、PET画像及びMRI画像を同時に撮像する撮像モードが実行される場合には、撮像開始前に、PET検出器13a及び13bを静磁場の磁場中心20を挟む位置に移動する。また、例えば、移動機構23は、PET画像のみを撮像する撮像モードが実行される場合には、撮像開始前に、PET検出器13a及び13bを隣接させるように移動する。また、例えば、移動機構23は、MR画像のみを撮像する撮像モードが実行される場合には、PET検出器13a及び13bを静磁場の外へ移動する。
【0027】
また、例えば、移動機構23は、PET画像を撮像する撮像条件及び/又はMRI画像を撮像する撮像条件に応じて、PET検出器13a及び13bを移動する。例えば、移動機構23は、PET検出器13a及び13bを移動する際に、MR画像の撮像条件として設定されるFOV(Field Of View)の大きさや受信用高周波コイル7の種類に応じて、移動後の各PET検出器の間隔を変化させる。
【0028】
また、PET−MRI装置100は、移動機構23によってPET検出器13a及び13bが撮像用の位置に移動された後に、各PET検出器の位置を固定するとともに、傾斜磁場コイル3から各PET検出器に伝わる振動を緩和する振動緩衝機構を有する。図4は、本実施例1に係る振動緩衝機構24を示す図である。図4に示すように、例えば、振動緩衝機構24は、PET検出器13aと移動機構23との嵌合部に設けられる。また、PET検出器13bと移動機構23との嵌合部にも同様に振動緩衝機構24が設けられる。
【0029】
次に、本実施例1に係るPET−MRI装置100における有効撮像領域について説明する。図5は、本実施例1に係るPET−MRI装置100における有効撮像領域を示す図である。図5に示すように、PET−MRI装置100では、PET検出器13aの内周面で囲まれた領域25aと、PET検出器13bの内周面で囲まれた領域25bとが、それぞれPET画像のみを撮像可能な有効撮像領域となる。
【0030】
さらに、図5に示すように、PET検出器13aの内周面とPET検出器13bの内周面との間に形成される領域26及びMR画像の有効撮像領域21の両方に含まれる領域27が、PET画像及びMR画像を同時に撮像可能な有効撮像領域となる。この有効撮像領域27は、円錐の底面を張り合わせた形状になる。
【0031】
このように、本実施例1に係るPET−MRI装置100では、MRI画像を撮像可能な有効撮像領域21、PET画像を撮像可能な有効撮像領域25a及び25bがそれぞれ設定され、さらに、MRI画像及びPET画像を同時に撮像可能な有効撮像領域27が設定される。
【0032】
上述したように、本実施例1に係るPET−MRI装置100は、静磁場磁石1と、送信用高周波コイル5と、傾斜磁場コイル3と、受信用高周波コイル7と、計算機10と、PET検出器13a及び13bと、PET画像再構成部16とを備える。連続した構造物である静磁場磁石1は、円筒状のボア22内に静磁場を発生させる。送信用高周波コイル5は、静磁場内に置かれた被検体Pに高周波パルスを印加する。傾斜磁場コイル3は、高周波パルスが印加された被検体Pに傾斜磁場を印加する。受信用高周波コイル7は、高周波パルス及び傾斜磁場の印加により被検体Pから発せられる磁気共鳴信号を検出する。計算機10は、受信用高周波コイル7により検出された磁気共鳴信号に基づいてMR画像を再構成する。PET検出器13a及び13bは、リング状に形成され、被検体Pに投与された陽電子放出核種から放出されるガンマ線を検出する。PET画像再構成部16は、PET検出器13a及び13bにより検出されたガンマ線に基づいて生成された投影データからPET画像を再構成する。そして、PET検出器13aとPET検出器13bとは、静磁場の磁場中心20を挟むようにボア22の軸方向に間隔を開けて配置される。このように、本実施例1では、MR画像の撮像有効領域となる磁場中心の周辺を避けて、PET検出器13a及び13bが配置される。したがって、本実施例1によれば、PET検出器の影響によるMR画像の画質劣化を抑えることができる。
【0033】
また、本実施例1では、PET検出器13a及び13bが、送信用高周波コイル5の内周側に設けられる。これにより、送信用高周波コイル5の内周側に撮像用の空間を有する従来のMRI装置に対して、PET検出器13a及び13bを容易に追加することができるので、PET−MRI装置を容易に実現することができる。
【0034】
また、本実施例1では、移動機構23が、撮像モードに応じて、ボア22の軸方向に沿ってPET検出器13a及び13bを移動する。これにより、PET画像及びMRI画像の両方又は一方が撮像される場合に、実施される撮像の種類に応じて、PET検出器13a及び13bを適切な位置に移動することができる。
【0035】
また、本実施例1では、移動機構23が、PET画像及びMRI画像を同時に撮像する撮像モードが実行される場合には、撮像開始前にPET検出器13a及び13bを静磁場の磁場中心20を挟む位置に移動する。これにより、PET画像及びMRI画像が同時に撮像される場合に、高画質のMR画像を容易に撮像することができる。
【0036】
また、本実施例1では、移動機構23が、PET画像のみを撮像する撮像モードが実行される場合には、撮像開始前にPET検出器13a及び13bを隣接させるように移動する。これにより、PET画像のみが撮像される場合に、広い撮像領域を確保することができる。
【0037】
また、本実施例1では、移動機構23が、MR画像のみを撮像する撮像モードが実行される場合には、PET検出器13a及び13bを静磁場の外へ移動する。これにより、MR画像のみが撮像される場合に、PET検出器13a及び13bによる画質劣化が無いMR画像を得ることができる。
【0038】
また、本実施例1では、移動機構23が、PET画像を撮像する撮像条件及び/又はMRI画像を撮像する撮像条件に応じて、PET検出器13a及び13bを移動する。これにより、PET画像及びMR画像の両方又は一方が撮像される場合に、PET検出器13aとPET検出器13bとの間隔を自動的に設定することができる。
【0039】
また、本実施例1では、振動緩衝機構24が、移動機構23によってPET検出器13a及び13bが撮像用の位置に移動された後に、各PET検出器の位置を固定するとともに、傾斜磁場コイル3から各PET検出器に伝わる振動を緩和する。これにより、傾斜磁場コイル3によって生じる機械振動からPET検出器13a及び13bを保護することができる。
【0040】
また、本実施例1では、PET検出器13a及び13bに接続される信号線14及び電源ケーブル19が、静磁場の磁場中心20の周辺を通過しないように配線される。これにより、PET検出器13a及び13bから出力される信号により生じるノイズを抑えることができる。
【0041】
また、本実施例1では、PET検出器13a及び13bが、検出したガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに光信号に変換して出力する。これにより、PET検出器13a及び13bから出力される信号により生じるノイズをより確実に抑えることができる。
【0042】
また、本実施例1では、PET検出器13a及び13bが、検出したガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに無線信号に変換して出力する。これにより、PET検出器13a及び13bから出力される信号により生じるノイズをより確実に抑えることができる。
【実施例2】
【0043】
次に、実施例2について説明する。実施例1では、PET検出器13a及び13bが送信用高周波コイル5の内周側に設けられる場合について説明した。これに対し、実施例2では、PET検出器33a及び33bが送信用高周波コイル5の外周側に設けられる場合について説明する。なお、本実施例2に係るPET−MRI装置の基本的な構成は図1に示したものと同じであり、PET検出器33a及び33bの配置のみが異なる。
【0044】
図6は、本実施例2に係るPET検出器33a及び33bの周辺における各部の配置を示す図である。なお、ここでは、図2に示した各部と同じ機能を果たす部については、同じ符号を付すこととして詳細な説明を省略する。図6に示すように、本実施例2では、PET検出器33a及び33bは、送信用高周波コイル5の外周側に設けられる。この構成は、例えば、体部を撮像する場合に全身用送信用RFコイルを送信用高周波コイル5とし、体部専用の表面コイルを受信用高周波コイル7とする場合などに用いられる。
【0045】
この構成では、例えば、PET検出器33a及び33bは、静磁場の磁場中心を挟む位置に固定された状態で設けられる。ここで、PET検出器33a及び33bは、実施例1と同様に、傾斜磁場コイル3により生じる振動を緩和する振動緩衝機構を介して、装置に固定されてもよい。例えば、PET検出器33a及び33bは、傾斜磁場コイル3の内周面に振動緩衝機構を介して固定される。これにより、本実施例2でも、傾斜磁場コイル3によって生じる機械振動からPET検出器33a及び33bを保護することができる。
【0046】
このように、本実施例2でも、MR画像の撮像有効領域となる磁場中心の周辺を避けて、PET検出器33a及び33bが配置される。したがって、本実施例2によれば、実施例1と同様に、PET検出器の影響によるMR画像の画質劣化を抑えることができる。
【実施例3】
【0047】
次に、実施例3について説明する。実施例3では、上記実施例1又は2で説明したPET−MRI装置において、被検体Pが置かれた天板2aをボア22内の軸方向に段階的に移動しながら撮像を繰り返す場合について説明する。このような撮像法は、ステップ・アンド・シュートと呼ばれる。なお、ここでは、実施例1で説明したPET−MRI装置においてステップ・アンド・シュートが行われる場合について説明する。
【0048】
図7は、本実施例3に係るステップ・アンド・シュートを説明するための図である。本実施例3に係るステップ・アンド・シュートでは、寝台2が、天板2aを移動させることで、ボア22の軸方向に沿って被検体Pを移動する。また、計算機10が、PET検出器13bの略中心位置、PET検出器13aとPET検出器13bとの間に挟まれた領域の略中心位置、PET検出器13aの略中心位置の順で被検体Pの撮像部位が段階的に移動するように、寝台2を制御する。
【0049】
これにより、図7に示すように、被検体Pの撮像位置に付けられた受信用高周波コイル7が段階的に移動する。具体的には、受信用高周波コイル7は、ボア22の軸方向に、PET検出器13aの中心とPET検出器13bの中心との間隔の半分の距離dだけ段階的に移動する。この結果、撮像部位は、ボア22の軸方向に、PET画像のみが撮像可能な範囲41、MRI画像及びPET画像を同時に撮像可能な範囲42、及び、PET画像のみが撮像可能な範囲41に順に移動することになる。
【0050】
そして、例えば、計算機10は、撮像部位がPET検出器13aの略中心位置、又は、PET検出器13bの略中心位置に移動した際には、PET画像を撮像するようにPET−MRI装置100を制御する。また、計算機10は、撮像部位がPET検出器13aとPET検出器13bとの間に挟まれた領域の略中心位置に移動した際には、PET画像及びMRI画像の両方又は一方を撮像するようにPET−MRI装置100を制御する。これにより、撮像部位を段階的に移動しながら、PET画像と、MR画像及びPET画像の両方又は一方とを順に撮像することができる。かかる実施例3でも、実施例1及び2と同様に、PET検出器の影響によるMR画像の画質劣化が抑えられる。
【0051】
なお、上記実施例1〜3では、2つのPET検出器13a及び13bが配置される場合について説明した。しかし、PET−MRI装置の実施形態はこれに限られない。例えば、PET検出器の数は3つ以上であってもよい。すなわち、3つ以上のPET検出器13a及び13bが配置された場合でも、各PET検出器の間に挟まれる領域において、PET画像とMR画像とを同時に撮像することができる。
【0052】
以上のように、実施例1、2又は3によれば、PET検出器の影響によるMR画像の画質劣化を抑えることが可能なPET−MRI装置を実現することができる。
【0053】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0054】
1 静磁場磁石
5 送信用高周波コイル
3 傾斜磁場コイル
7 受信用高周波コイル
10 計算機
13a,13b PET検出器
16 PET画像再構成部
【特許請求の範囲】
【請求項1】
円筒状のボア内に静磁場を発生させる連続した構造物である静磁場磁石と、
前記静磁場内に置かれた被検体に高周波パルスを印加する送信用高周波コイルと、
前記高周波パルスが印加された前記被検体に傾斜磁場を印加する傾斜磁場コイルと、
前記高周波パルス及び前記傾斜磁場の印加により前記被検体から発せられる磁気共鳴信号を検出する受信用高周波コイルと、
前記受信用高周波コイルにより検出された磁気共鳴信号に基づいてMR画像を再構成するMR画像再構成部と、
前記被検体に投与された陽電子放出核種から放出されるガンマ線を検出するリング状の第1の検出部及び第2の検出部と、
前記第1の検出部及び前記第2の検出部により検出されたガンマ線に基づいて生成された投影データからPET画像を再構成するPET画像再構成部とを備え、
前記第1の検出部と前記第2の検出部とは、前記静磁場の磁場中心を挟むように前記ボアの軸方向に間隔を開けて配置されることを特徴とするPET−MRI装置。
【請求項2】
前記第1の検出部及び前記第2の検出部は、前記送信用高周波コイルの内周側に設けられることを特徴とする請求項1に記載のPET−MRI装置。
【請求項3】
前記第1の検出部及び前記第2の検出部は、前記送信用高周波コイルの外周側に設けられることを特徴とする請求項1に記載のPET−MRI装置。
【請求項4】
撮像モードに応じて、前記ボアの軸方向に沿って前記第1の検出部及び前記第2の検出部を移動する移動部をさらに備えたことを特徴とする請求項1、2又は3に記載のPET−MRI装置。
【請求項5】
前記移動部は、PET画像及びMRI画像を同時に撮像する撮像モードが実行される場合には、撮像開始前に前記第1の検出部及び前記第2の検出部を前記静磁場の磁場中心を挟む位置に移動することを特徴とする請求項4に記載のPET−MRI装置。
【請求項6】
前記移動部は、PET画像のみを撮像する撮像モードが実行される場合には、撮像開始前に前記第1の検出部及び前記第2の検出部を隣接させるように移動することを特徴とする請求項4又は5に記載のPET−MRI装置。
【請求項7】
前記移動部は、MR画像のみを撮像する撮像モードが実行される場合には、前記第1の検出部及び前記第2の検出部を前記静磁場の外へ移動することを特徴とする請求項4、5又は6に記載のPET−MRI装置。
【請求項8】
前記移動部は、PET画像を撮像する撮像条件及び/又はMRI画像を撮像する撮像条件に応じて、前記第1の検出部及び前記第2の検出部を移動することを特徴とする請求項4〜7のいずれか一つに記載のPET−MRI装置。
【請求項9】
前記移動部によって前記第1の検出部及び前記第2の検出部が撮像用の位置に移動された後に、各検出部の位置を固定するとともに、前記傾斜磁場コイルから各検出部に伝わる振動を緩和する振動緩衝部をさらに備えることを特徴とする請求項4〜8のいずれか一つに記載のPET−MRI装置。
【請求項10】
前記第1の検出部及び前記第2の検出部は、前記静磁場の磁場中心を挟む位置に固定された状態で設けられることを特徴とする請求項1、2又は3に記載のPET−MRI装置。
【請求項11】
前記第1の検出部及び前記第2の検出部は、前記傾斜磁場コイルにより生じる振動を緩和する振動緩衝部を介して装置に固定されることを特徴とする請求項10に記載のPET−MRI装置。
【請求項12】
前記第1の検出部及び前記第2の検出部に接続される信号線及び電源線は、前記静磁場の磁場中心の周辺を通過しないように配線されることを特徴とする請求項1〜11のいずれか一つに記載のPET−MRI装置。
【請求項13】
前記第1の検出部及び前記第2の検出部は、検出した前記ガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに光信号に変換して出力することを特徴とする請求項1〜12のいずれか一つに記載のPET−MRI装置。
【請求項14】
前記第1の検出部及び前記第2の検出部は、検出した前記ガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに無線信号に変換して出力することを特徴とする請求項1〜12のいずれか一つに記載のPET−MRI装置。
【請求項15】
前記被検体が置かれた天板を前記ボアの軸方向に沿って移動させる寝台部と、
前記第1の検出部の略中心位置、前記第1の検出部と前記第2の検出部との間に挟まれた領域の略中心位置、及び、前記第2の検出部の略中心位置に前記被検体の撮像部位が段階的に移動するように前記寝台部を制御し、前記撮像部位が前記第1の検出部又は前記第2の検出部の略中心位置に移動した際には前記MR画像及び前記PET画像の両方又は一方が撮像されるように制御し、前記撮像部位が前記第1の検出部と前記第3の検出部との間に挟まれた領域の略中心位置に移動した際には前記PET画像が撮像されるように制御する制御部と
をさらに備えたことを特徴とする請求項1〜14のいずれか一つに記載のPET−MRI装置。
【請求項1】
円筒状のボア内に静磁場を発生させる連続した構造物である静磁場磁石と、
前記静磁場内に置かれた被検体に高周波パルスを印加する送信用高周波コイルと、
前記高周波パルスが印加された前記被検体に傾斜磁場を印加する傾斜磁場コイルと、
前記高周波パルス及び前記傾斜磁場の印加により前記被検体から発せられる磁気共鳴信号を検出する受信用高周波コイルと、
前記受信用高周波コイルにより検出された磁気共鳴信号に基づいてMR画像を再構成するMR画像再構成部と、
前記被検体に投与された陽電子放出核種から放出されるガンマ線を検出するリング状の第1の検出部及び第2の検出部と、
前記第1の検出部及び前記第2の検出部により検出されたガンマ線に基づいて生成された投影データからPET画像を再構成するPET画像再構成部とを備え、
前記第1の検出部と前記第2の検出部とは、前記静磁場の磁場中心を挟むように前記ボアの軸方向に間隔を開けて配置されることを特徴とするPET−MRI装置。
【請求項2】
前記第1の検出部及び前記第2の検出部は、前記送信用高周波コイルの内周側に設けられることを特徴とする請求項1に記載のPET−MRI装置。
【請求項3】
前記第1の検出部及び前記第2の検出部は、前記送信用高周波コイルの外周側に設けられることを特徴とする請求項1に記載のPET−MRI装置。
【請求項4】
撮像モードに応じて、前記ボアの軸方向に沿って前記第1の検出部及び前記第2の検出部を移動する移動部をさらに備えたことを特徴とする請求項1、2又は3に記載のPET−MRI装置。
【請求項5】
前記移動部は、PET画像及びMRI画像を同時に撮像する撮像モードが実行される場合には、撮像開始前に前記第1の検出部及び前記第2の検出部を前記静磁場の磁場中心を挟む位置に移動することを特徴とする請求項4に記載のPET−MRI装置。
【請求項6】
前記移動部は、PET画像のみを撮像する撮像モードが実行される場合には、撮像開始前に前記第1の検出部及び前記第2の検出部を隣接させるように移動することを特徴とする請求項4又は5に記載のPET−MRI装置。
【請求項7】
前記移動部は、MR画像のみを撮像する撮像モードが実行される場合には、前記第1の検出部及び前記第2の検出部を前記静磁場の外へ移動することを特徴とする請求項4、5又は6に記載のPET−MRI装置。
【請求項8】
前記移動部は、PET画像を撮像する撮像条件及び/又はMRI画像を撮像する撮像条件に応じて、前記第1の検出部及び前記第2の検出部を移動することを特徴とする請求項4〜7のいずれか一つに記載のPET−MRI装置。
【請求項9】
前記移動部によって前記第1の検出部及び前記第2の検出部が撮像用の位置に移動された後に、各検出部の位置を固定するとともに、前記傾斜磁場コイルから各検出部に伝わる振動を緩和する振動緩衝部をさらに備えることを特徴とする請求項4〜8のいずれか一つに記載のPET−MRI装置。
【請求項10】
前記第1の検出部及び前記第2の検出部は、前記静磁場の磁場中心を挟む位置に固定された状態で設けられることを特徴とする請求項1、2又は3に記載のPET−MRI装置。
【請求項11】
前記第1の検出部及び前記第2の検出部は、前記傾斜磁場コイルにより生じる振動を緩和する振動緩衝部を介して装置に固定されることを特徴とする請求項10に記載のPET−MRI装置。
【請求項12】
前記第1の検出部及び前記第2の検出部に接続される信号線及び電源線は、前記静磁場の磁場中心の周辺を通過しないように配線されることを特徴とする請求項1〜11のいずれか一つに記載のPET−MRI装置。
【請求項13】
前記第1の検出部及び前記第2の検出部は、検出した前記ガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに光信号に変換して出力することを特徴とする請求項1〜12のいずれか一つに記載のPET−MRI装置。
【請求項14】
前記第1の検出部及び前記第2の検出部は、検出した前記ガンマ線に関する信号をアナログ信号からデジタル信号に変換した後に、さらに無線信号に変換して出力することを特徴とする請求項1〜12のいずれか一つに記載のPET−MRI装置。
【請求項15】
前記被検体が置かれた天板を前記ボアの軸方向に沿って移動させる寝台部と、
前記第1の検出部の略中心位置、前記第1の検出部と前記第2の検出部との間に挟まれた領域の略中心位置、及び、前記第2の検出部の略中心位置に前記被検体の撮像部位が段階的に移動するように前記寝台部を制御し、前記撮像部位が前記第1の検出部又は前記第2の検出部の略中心位置に移動した際には前記MR画像及び前記PET画像の両方又は一方が撮像されるように制御し、前記撮像部位が前記第1の検出部と前記第3の検出部との間に挟まれた領域の略中心位置に移動した際には前記PET画像が撮像されるように制御する制御部と
をさらに備えたことを特徴とする請求項1〜14のいずれか一つに記載のPET−MRI装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−95820(P2012−95820A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−245606(P2010−245606)
【出願日】平成22年11月1日(2010.11.1)
【出願人】(301032942)独立行政法人放射線医学総合研究所 (149)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月1日(2010.11.1)
【出願人】(301032942)独立行政法人放射線医学総合研究所 (149)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]