
PLCのスレーブ
【課題】 透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、しかもPLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となるようにしたPLCのスレーブを提供すること。
【解決手段】 PLCからの指示を待つことなく、相互干渉防止のための投受光同期を独自に実現するために、出力処理部への出力データの送出タイミングと入力処理部からの入力データ取込タイミングとを制御する投受光タイミング制御手段と、入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶するワーク検出接点メモリとを設ける。
【解決手段】 PLCからの指示を待つことなく、相互干渉防止のための投受光同期を独自に実現するために、出力処理部への出力データの送出タイミングと入力処理部からの入力データ取込タイミングとを制御する投受光タイミング制御手段と、入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶するワーク検出接点メモリとを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、プログラマブル・コントローラ(以下、PLCと言う)と通信を介して結ばれて入出力ターミナルとして機能するリモート入出力ターミナル(以下、スレーブと言う)に係り、特に、複数の透過型光電センサが接続されるPLCのスレーブに関する。
【背景技術】
【0002】
当業者にはよく知られているように、透過型光電センサを複数備えてワークの有無等の判定を行うようにした透過型光電センサシステムにあっては、ある透過型光電センサの受光器に他の透過型光電センサの投光器からの光が入射されること(一般に、「相互干渉」と言う)に起因して、ワークの有無等の誤判定が生ずる場合がある(特許文献1参照)。
【0003】
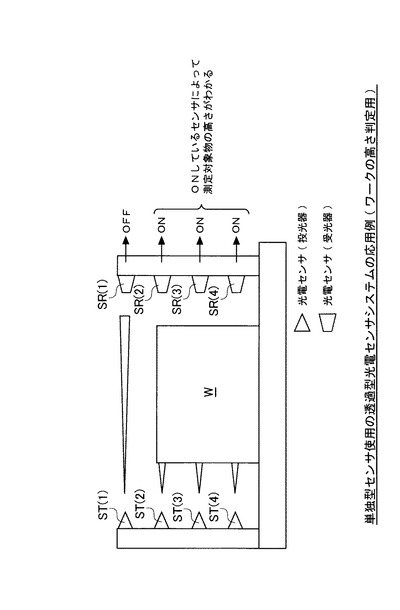
単独型センサ使用の透過型光電センサシステムの応用例(ワークの高さ検出用)が図6に示されている。このセンサシステムには、4台の透過型光電センサ(以下、単に「センサ」という)が含まれている。第1乃至第4のセンサは、それぞれ投光器ST(1)〜(4)と受光器SR(1)〜(4)とを有する。図示例では、4台の投光器ST(1)〜(4)と4台の受光器SR(1)〜(4)とは、ワークWの搬送路を挟んで、同一センサ同士が対向するようにして、上下方向に所定間隔を隔てて配置されている。すなわち、4台の投光器ST(1)〜(4)はワークの搬送路の図中左側に、4台の受光器SR(1)〜(4)は搬送路の図中右側にそれぞれまとめて配置されている。このような構成によれば、4台の受光器SR(1)〜(4)のうちで、下から連続する幾つまでがONするかによって、ワークWの高さを5段階に判定することができる。
【0004】
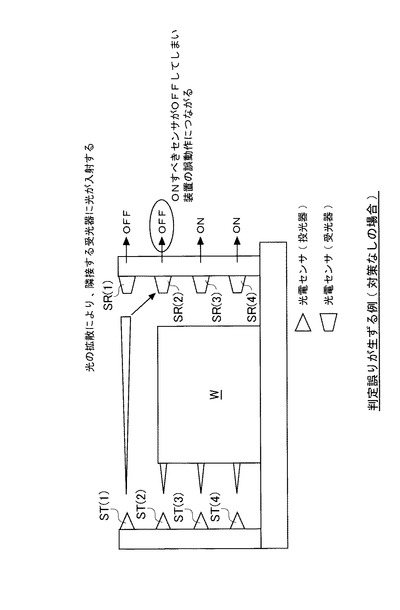
判定誤りが生ずる例(対策なしの場合)が図7に示されている。このように、第1のセンサの投光器ST(1)からの光が拡散して第2のセンサの受光器SR(2)に入射されると、第2のセンサの投光器ST(2)からの光はワークWにより遮られているにも拘わらず、第2のセンサの受光器SR(2)が上記の拡散光を受光することによりOFFとなってしまい、ワークWの高さ判定を誤る結果となる。
【0005】
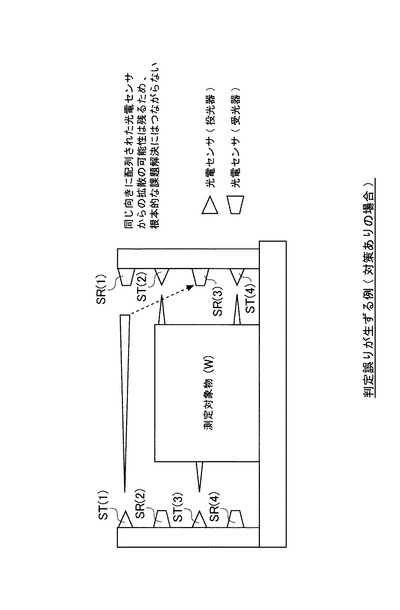
判定誤りが生ずる例(対策ありの場合)が図8に示されている。このように、対をなす投光器STと受光器SRとの配置を1つおきに左右逆にしたとしても、第1のセンサの投光器ST(1)からの光がより広く拡散して第3のセンサの受光器SR(3)に入射されると、第3のセンサの投光器ST(3)からの光はワークWにより遮られているにも拘わらず、第3のセンサの受光器SR(3)が上記の拡散光を受光することによりOFFとなってしまい、やはり、ワークWの高さ判定を誤る結果となる。
【0006】
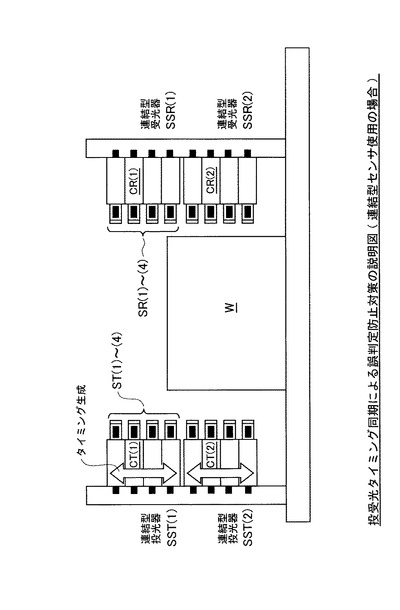
投受光タイミング同期による誤判定防止対策の説明図(連結型センサ使用の場合)が図9に示されている。この例にあっては、単独型センサに代えて連結型センサが採用されている。各連結型センサは、互いに対をなす連結型投光器SSTと連結型受光器SSRとから構成される。連結型投光器SSTは一連に連結された4個の投光器ST(1)〜(4)と、それらの投光器を順に1つずつ動作させる投光タイミング制御器CTとを有する。連結型受光器SSRは一連に連結された4個の受光器SR(1)〜(4)と、それらの受光器を順に1つずつ動作させる受光タイミング制御器CRとを有する。
【0007】
このような連結型センサを採用した例によれば、所謂同期検波の技術が応用されているため、各受光器SR(1)〜(4)のそれぞれは、対面する各投光器ST(1)〜(4)が投光中でない限り、その受光出力信号が取り込まれることはないから、対面する以外の投光器からの拡散光が入射されても、ワークWの高さ判定を誤ることはない。しかし、この連結型センサを使用する例にあっては、配線工数の増大並びにセンサ自体の価格が高価なことから、コストアップが招来されると言う問題がある。
【0008】
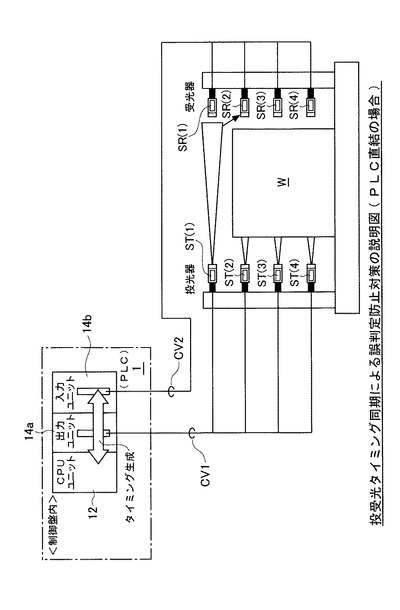
投受光タイミング同期による誤判定防止対策の説明図(PLC直結の場合)が図10に示されている。この例にあっては、第1乃至第4のセンサは、制御盤内に配置されたPLC1によって投受光タイミングの同期が取られる。PLC1はこの例ではビルディングブロック型のものとされ、バックプレーン上に装着される各種のユニットの中で、CPUユニット12、出力ユニット14a、及び入力ユニット14bのみが図示されている。
【0009】
出力ユニット14aは、一連の出力端子を有する出力用端子台を有する。この出力用端子台の各出力端子には、多芯ケーブルCV1を介して、各投光器ST(1)〜(4)の投光制御端子が接続される。入力ユニット14bは、一連の入力端子を有する入力用端子台を有する。この入力用端子台の各入力端子には、多芯ケーブルCV2を介して、各受光器SR(1)〜(4)の受光出力端子が接続される。それらの出力ユニット14a及び入力ユニット14bは、図示しないバックプレーン上に敷設されたシステムバスを介して、CPUユニット12との間で入出力データのやりとりが可能とされている。
【0010】
CPUユニット12内には、例えば、ユーザプログラムを格納するためのユーザメモリと、入出力データを格納するための入出力メモリと、ユーザプログラム実行機能が組み込まれたASICと、ユニット全体を統括制御するためのマイクロプロセッサと、マイクロプロセッサが実行すべきシステムプログラムを格納するためのシステムメモリと、マイクロプロセッサが各種のプログラムを実行するためのワークエリアとして使用されるワークメモリ等が設けられている。
【0011】
マイクロプロセッサは、システムメモリに格納されたシステムプログラムを実行することにより、動作モードがRUNモードの場合には、入出力更新処理と、ユーザプログラム実行処理と、周辺サービス処理とを1サイクルとして、これらの処理を繰り返し実行するように仕組まれている。
【0012】
ここで、当業者にはよく知られているように、入出力更新処理とは、入力ユニット14bから取り込まれた(通信マスタユニットが存在するときには、通信ユニットからの入力データの取り込みも含む)入力データを入出力メモリの入力領域に書き込む入力更新処理と、入出力メモリの出力エリアから読み出された出力データを出力ユニット14aに送り出す(通信マスタユニットが存在するときには、通信ユニットへの出力データの送り出しも含む)出力更新処理とから構成されている。
【0013】
ユーザプログラム実行処理とは、ユーザメモリからユーザプログラムを構成する各命令語を順次に読み出すと共に、これを入出力メモリに格納される入出力データを参照して実行し、その実行結果で入出力メモリの内容を書き換えると言った一連の処理により構成されている。なお、周辺サービス処理とは、ツール装置との間でデータのやり取りを行ったり、ネットワークを介して他のPLCとのデータのやり取りを行ったりする処理などで構成される。
【0014】
一方、ユーザメモリに格納されるべきラダー図言語等で記述されるユーザプログラムとしては、複数のセンサ間における相互干渉を回避しつつ、各センサの受光器からの受光出力信号を取り込むように仕組まれた投受光タイミング制御プログラムが採用される。この投受光タイミング制御プログラムは、投光タイミング制御機能と受光タイミング制御機能とを含んで構成される。
【0015】
投光タイミング制御機能は、複数系統の投光制御信号が、各投光器ST(1)〜(4)の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、出力ユニット14aへと対応する出力データを与えるように仕組まれている。これら複数系統の投光制御信号のそれぞれは、投光停止中に対応する第1の論理状態期間と投光中に対応する第2の論理状態期間(α)とを交互に繰り返すものであり、かつ投光中に対応する第2の論理状態期間(α)が投光制御信号相互間で重ならないように移相されている。
【0016】
受光タイミング制御機能は、各投光器と対をなす受光器のそれぞれから、各対応する投光器ST(1)〜(4)の投光制御信号の第2の論理状態期間(α)内であって、期間(α)の開始から投受光間伝達遅れ相当期間(β)経過後の受光出力信号のみが、各受光器SR(1)〜(4)の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御するように仕組まれている。
【0017】
このような投受光タイミング制御プログラムが組み込まれたPLC1を有するセンシングシステムによれば、同期検波の技術が応用されているため、各受光器SR(1)〜(4)のそれぞれは、対面する各投光器ST(1)〜(4)が投光中でない限り、その受光出力信号が取り込まれることはないから、対面する以外の投光器からの拡散光が入射されても、ワークWの高さ判定を誤ることはない。しかも、この例にあっては、単独型のセンサをそのまま使用することができるため、センサ価格に起因するコストアップについては回避することができる。
【0018】
しかし、この例にあっては、複数のセンサのそれぞれとPLC1の出力ユニット14a、入力ユニット14bとを多芯ケーブルで直結せねばならないから、センサとPLCとが大きく離隔されている場合には、多芯ケーブルによる配線引き回し並びに配線工数の増大によりコストアップが招来されると言う問題点がある。
【特許文献1】特開平10−32479号公報
【発明の開示】
【発明が解決しようとする課題】
【0019】
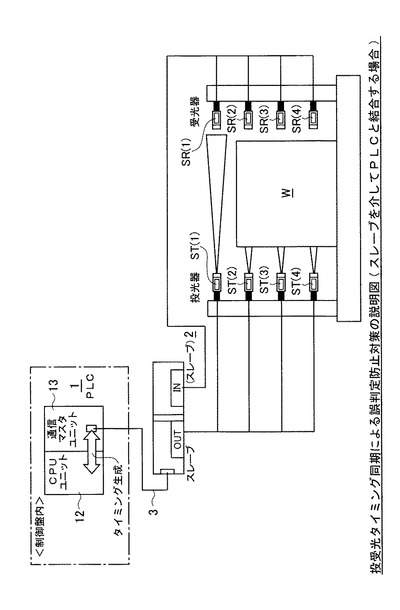
投受光タイミング同期による誤判定防止対策の説明図(スレーブを介してPLCと接続する場合)が図11に示されている。この例にあっては、第1乃至第4のセンサは、直接にではなくて、スレーブ2を介して、制御盤内に配置されたPLC1によって投受光タイミングの同期が取られる。PLC1は、この例にあっても、ビルディングブロック型のものとされ、バックプレーン上に装着される各種のユニットの中で、CPUユニット12と通信マスタユニット13のみが図示されている。
【0020】
なお、CPUユニット12の内部構成については、先に図10を参照して説明した通りである。また、ユーザメモリに格納されるべきユーザプログラムとしては、図10を参照して説明したように、複数のセンサ間における干渉を回避しつつ、各センサの受光器からの受光出力信号を取り込むように仕組まれた投受光タイミング制御プログラムが採用される。
【0021】
通信マスタユニット13は、当業者にはよく知られているように、バックプレーン上に敷設されたシステムバスを介してCPUユニット12との間で入出力データのやり取りを行う一方、ネットワーク3を介して通信によりスレーブ2との間で入出力データのやり取りを行うように構成されている。ここで、CPUユニット12との間の入出力データのやり取りは、CPUユニット12の側で実行される入出力更新処理のタイミングに依存される。一方、スレーブ2との間における通信による入出力データのやり取りは、CPUユニット12の側における入出力更新処理のタイミングとは非同期のタイミングにて実行される。
【0022】
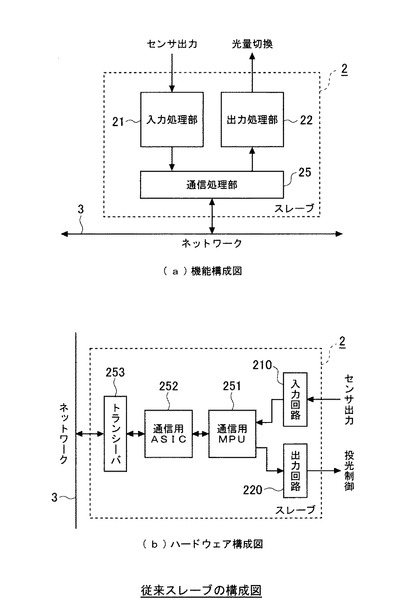
従来スレーブの構成図が図12に示されている。同図(a)は機能構成図、同図(b)はハードウェア構成図である。スレーブ2は、同図(a)に示されるように、PLC1の通信マスタユニット13との間でネットワーク3を介して入出力データのやり取りを行うための通信処理部25と、複数の透過型光電センサの各投光器ST(1)〜(4)の投光制御端子のそれぞれへと接続されるべき複数の出力端子を含む出力端子台OUT(図11参照)と、複数の透過型光電センサの各受光器SR(1)〜(4)の受光出力端子のそれぞれへと接続されるべき複数の入力端子を含む入力端子台IN(図11参照)と、与えられた出力データに基づいて出力信号を生成し、これを出力端子台OUTの該当する出力端子から外部へと送出する出力処理部22と、入力端子台INを構成する入力端子へと外部から入力される入力信号を取り込んで対応する入力データを生成する入力処理部21とを含んで構成されている。
【0023】
より具体的には、同図(b)に示されるように、上記の入力処理部21の機能が外部入力との電気的な変換を行うための入力回路210により実現され、上記の出力処理部22の機能が外部出力との電気的な変換を行うための出力回路220により実現され、さらに通信処理部25の機能が通信用MPU251、通信用ASIC252、及びトランシーバ253により実現される。
【0024】
このような投受光タイミング制御プログラムが組み込まれたPLC1及びスレーブ2を有するセンシングシステムによれば、同期検波の技術が応用されているため、各受光器SR(1)〜(4)のそれぞれは、対面する各投光器ST(1)〜(4)が投光中でない限り、その受光出力信号が取り込まれることはないから、対面する以外の投光器からの拡散光が入射されても、ワークWの高さ判定を誤ることはない。また、この例にあっても、単独型のセンサをそのまま使用することができるため、センサ価格に起因するコストアップについては回避することができる。しかも、複数のセンサのそれぞれとPLC1の通信マスタユニット13との間にあって、センサの間近には、スレーブ2が介在されているため、センサとPLCとが大きく離隔されている場合にも、多芯ケーブルによる配線引き回しはスレーブ2までで極力短くて済むと共に、スレーブ2と通信マスタユニット13との間は通信ケーブルにて結ばれるため、多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについてはも回避することができる。
【0025】
しかしながら、このような投受光タイミング制御プログラムが組み込まれたPLC1及びスレーブ2を有するセンシングシステムにおいては、CPUユニット12と通信マスタユニット13との間の入出力データのやり取りは、CPUユニット12の側で実行される入出力更新処理のタイミングに依存される一方、通信マスタユニット13とスレーブ2との間における通信による入出力データのやり取りは、CPUユニット12の側における入出力更新処理のタイミングとは非同期のタイミングにて実行されるため、各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を適切に設定するためには、ユーザプログラム中において、理論上の遅れ時間に加えて、サイクルタイムに起因する時間誤差と通信処理に起因する時間誤差との双方を考慮してプログラミングを行わねばならず、相互干渉防止のためのプログラミングが極めて煩雑であるという問題点があった。
【0026】
この発明は、上述の問題点に着目してなされたものであり、その目的とするところは、透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となるようにしたPLCのスレーブを提供することにある。
【0027】
この発明のさらに他の目的並びに作用効果については、明細書の以下の記述を参照することにより、当業者であれば容易に理解されるであろう。
【課題を解決するための手段】
【0028】
上述の技術的な課題は、以下の構成を有するPLCのスレーブにより解決することができると考えられる。
【0029】
すなわち、この発明のPLCのスレーブは、通信処理部と、出力端子台と、入力端子台と、出力処理部と、入力処理部と、制御部とを含んで構成される。
【0030】
ここで、通信処理部は、PLCとの間でネットワークを介して入出力データのやり取りを行うためのものである。出力端子台は、複数の透過型光電センサの各投光器の投光制御端子のそれぞれへと接続されるべき複数の出力端子を含んでいる。入力端子台は、複数の透過型光電センサの各受光器の受光出力端子のそれぞれへと接続されるべき複数の入力端子を含んでいる。出力処理部は、与えられた出力データに基づいて出力信号を生成し、これを出力端子台の該当する出力端子から外部へと送出する。入力処理部は、入力端子台を構成する入力端子へと外部から入力される入力信号を取り込んで対応する入力データを生成する。
【0031】
以上の基本的な構成に加えて、制御部には、投受光タイミング制御手段と、ワーク検出接点メモリとが設けられている。
【0032】
ここで、投受光タイミング制御手段は、PLCからの指示を待つことなく、出力処理部への出力データの送出タイミングと入力処理部からの入力データ取込タイミングとを制御する。
【0033】
ワーク検出接点メモリは、投受光タイミング制御手段の作動下において、入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶する。
【0034】
このような構成によれば、投受光タイミング制御手段は、PLCからの指示を待つことなく、複数の透過型光電センサの各対をなす投光器と受光器との間における相互干渉防止のための投受光同期をスレーブ独自に実現するために、出力処理部への出力データの送出タイミングと入力処理部からの入力データ取込タイミングとを制御する一方、ワーク検出接点メモリは、投受光タイミング制御手段の作動下において、入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶するため、PLCの側では、干渉防止のための指示をスレーブ側へと与えることなく、単に、ワーク検出接点メモリの内容を参照するだけで、干渉防止機能の作動下において、各対応する透過型光電センサのワーク検出接点の動作状態を取得することができる。
【0035】
そのため、本発明のスレーブによれば、センシングシステムを構成する複数の透過型センサの側に配置して、通信を介してPLCと接続することにより、相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となると言う利点がある。
【0036】
好ましい実施形態においては、投受光タイミング制御手段を、それぞれ所定の構成を有する投光タイミング制御手段と受光タイミング制御手段とで構成することができる。
【0037】
この場合、投光タイミング制御手段は、それぞれ投光停止中に対応する第1の論理状態期間と投光中に対応する第2の論理状態期間(α)とを交互に繰り返し、かつ投光中に対応する第2の論理状態期間(α)が信号相互間で重ならないように移相された複数系統の投光制御信号が、前記各投光器の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、前記出力処理部へと対応する出力データを与える。
【0038】
受光タイミング制御手段は、各投光器と対をなす受光器のそれぞれから、各対応する投光器の投光制御信号の第2の論理状態期間(α)内であって、かつ期間(α)の開始から投受光間伝達遅れ相当期間(β)経過後の受光出力信号のみが、各受光器の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御する。
【0039】
このような構成によれば、複数の透過型センサを有するセンシングシステムにおいて、投光期間同士が重なることが無く、しかも受光期間については、投受光器間の信号伝達遅れを考慮して、投光に基づく受光信号が確実に受光されて取り込まれるため、信頼性の高いセンシング動作を実現することができる。
【0040】
好ましい実施形態においては、第2の論理状態期間(α)、及び投受光間伝達遅れ相当期間(β)は、任意に変更可能なパラメータとして所定のパラメータ格納用メモリに格納されている。
【0041】
このような構成によれば、上述のパラメータ格納用メモリに格納されたパラメータα、βの値を任意に所定のツールで書き換えることで、各々のセンシングシステムに特化した最適な運用が可能となる。
【発明の効果】
【0042】
この発明によれば、透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となると言った利点がある。
【発明を実施するための最良の形態】
【0043】
以下にこの発明に係るPLCのスレーブの好適な実施の一形態を添付図面を参照しながら詳細に説明する。
【0044】
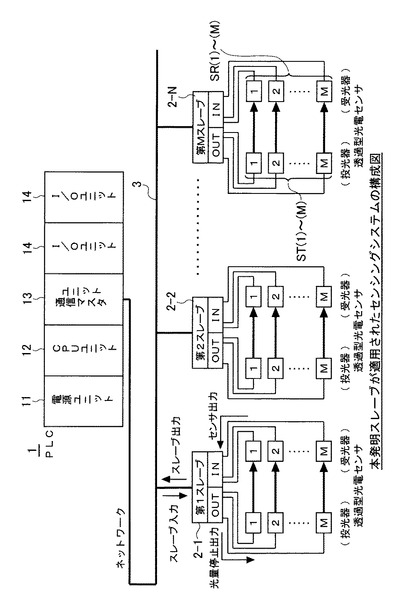
本発明スレーブが適用されたセンシングシステムの構成図が図1に示されている。同図に示されるように、このセンシングシステムは、1台のPLC1とN台のスレーブ2−1,2−2,・・・2−Nとをネットワーク3で結んで構成されている。
【0045】
この例では、PLC1としてはビルディングブロック型のものが採用されている。図示例のPLC1は、システムバスが敷設されたバックプレーン上に、電源ユニット11、CPUユニット12、通信マスタユニット13、及び2台のI/Oユニット14,14をコネクタ接続することにより構成されており、電源ユニット11はシステムバス上の電源ラインを介して各ユニット12〜14へと電源を供給している。
【0046】
CPUユニット12は、PLC1の全体を統括制御するものであり、先に説明したように、その内部には、ユーザプログラムを格納するためのユーザメモリと、入出力データを格納するための入出力メモリと、ユーザプログラム実行機能が組み込まれたASICと、ユニット全体を統括制御するためのマイクロプロセッサと、マイクロプロセッサが実行すべきシステムプログラムを格納するためのシステムメモリと、マイクロプロセッサが各種のプログラムを実行するためのワークエリアとして使用されるワークメモリ等が設けられている。
【0047】
マイクロプロセッサは、システムメモリに格納されたシステムプログラムを実行することにより、動作モードがRUNモードの場合には、入出力更新処理と、ユーザプログラム実行処理と、周辺サービス処理とを1サイクルとして、これらの処理を繰り返し実行するように仕組まれている。
【0048】
ここで、当業者にはよく知られているように、入出力更新処理とは、入出力ユニット14及び通信マスタユニット13から取り込まれた入力データを入出力メモリの入力領域に書き込む入力更新処理と、入出力メモリの出力エリアから読み出された出力データを入出力ユニット14及び通信マスタユニット13へと送り出す出力更新処理とから構成されている。
【0049】
ユーザプログラム実行処理とは、ユーザメモリからユーザプログラムを構成する各命令語を順次に読み出すと共に、これを入出力メモリに格納される入出力データを参照して実行し、その実行結果で入出力メモリの内容を書き換えると言った一連の処理により構成されている。
【0050】
なお、周辺サービス処理とは、図示しないツール装置との間でデータのやり取りを行ったり、ネットワークを介して他のPLCとの通信を介してデータのやり取りを行ったりする処理などで構成される。
【0051】
通信マスタユニットは、ネットワーク3を介して各スレーブ2−1,2−2,・・・2−Nとの間で入出力データのやり取りを行うための通信処理部と、CPUユニット11との間でバックプレーン上のシステムバスを介してハンドシェイク処理によりデータのやり取りを行うための転送仲介メモリ(一般に、デュアルポートメモリで構成される)と、ユニット全体を統括制御するためのマイクロプロセッサを含んで構成される。
【0052】
先に説明した出力更新処理においては、転送仲介メモリには、通信を介してスレーブ2−1,2−2,・・・2−Nのいずれかへと送信されるべき出力データが、CPUユニット12側の制御で書き込まれる。こうして転送仲介メモリの所定領域に格納された出力データは、随時又は所定のタイミングで、転送仲介メモリの所定領域から読み出され、ネットワーク3を介する通信により、スレーブ2−1,2−2,・・・2−Nのうちの該当するものへと送られる。
【0053】
一方、ネットワーク3を介する通信によりスレーブ2−1,2−2,・・・2−Nのいずれかから受信された入力データは、転送仲介メモリの所定領域に書き込まれる。こうして転送仲介メモリの所定領域に書き込まれた入力データは、先に説明した入力更新処理において、CPUユニット12側の制御で読み出され、CPUユニット12内の入出力メモリの入力領域に書き込まれる。
【0054】
このようにして、入出力更新処理に際して、CPUユニット12と通信マスタユニット13との間で、転送仲介メモリを介して入出力データのやり取りが行われ、随時又は所定のタイミングにて、通信マスタユニット13と各スレーブ2−1,2−2,・・・2−Nとの間において、ネットワーク3を経由する通信を介して、入出力データのやり取りが行われる。
【0055】
次に、本発明の要部であるスレーブ2−1,2−2,・・・2−Nの構成について詳細に説明する。本発明スレーブの機能構成図が図2に、ハードウェア構成図が図3にそれぞれ示されている。
【0056】
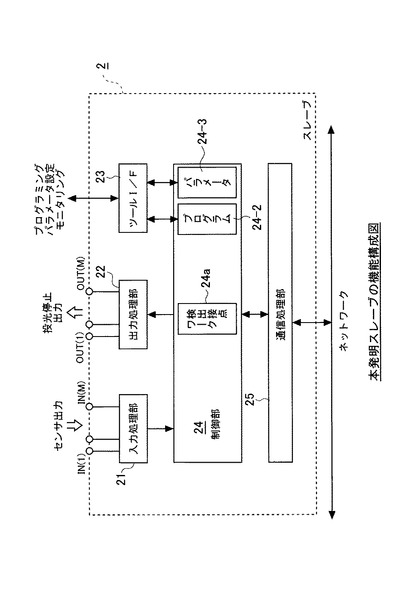
図1と図2とを参照して明らかなように、N台のスレーブ2−1,2−2,・・・2−Nのそれぞれは、PLC1(正確には、PLC1の通信マスタユニット13)との間でネットワーク3を介して入出力データのやり取りを行うための通信処理部25と、複数(この例ではM台)の透過型光電センサの各投光器ST(1)〜(M)の投光制御端子のそれぞれへと接続されるべき複数(M個)の出力端子OUT1〜Mを含む出力端子台OUTと、複数の透過型光電センサの各受光器SR(1)〜(M)の受光出力端子のそれぞれへと接続されるべき複数の入力端子IN1〜Mを含む入力端子台INと、与えられた出力データに基づいて出力信号を生成し、これを出力端子台OUTの該当する出力端子OUT1〜Mから外部へと送出する出力処理部22と、入力端子台INを構成する入力端子IN1〜Mへと外部から入力される入力信号を取り込んで対応する入力データを生成する入力処理部21と、スレーブ2の全体を統括する制御部24とを含んで構成される。
【0057】
制御部24には、PLC1からの指示を待つことなく、複数(M個)の透過型光電センサの各対をなす投光器ST(1)〜(M)と受光器SR(1)〜(M)との間における相互干渉防止のための投受光同期をスレーブ独自に実現するために、出力処理部22への出力データの送出タイミングと入力処理部21からの入力データ取込タイミングとを制御する投受光タイミング制御手段として機能するプログラム24−2と、投受光タイミング制御手段の作動下において、入力処理部21を介して複数の入力端子IN1〜Mのそれぞれから取り込まれる入力データに相当するワーク検出接点24aと、のちに詳述するパラメータ24−3とが含まれている。
【0058】
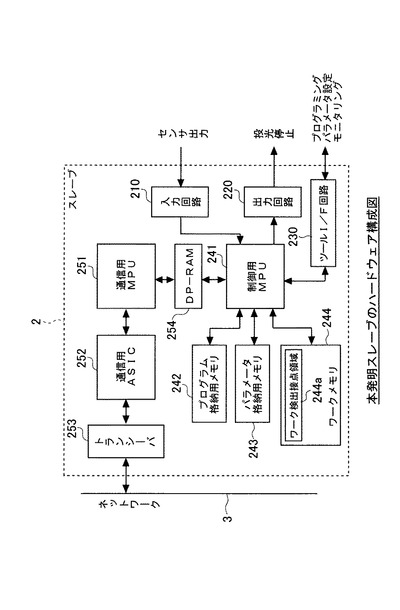
より具体的には、図2に示される入力処理部21、出力処理部22の機能は、図3に示されるように、外部入力との電気的変換を行う入力回路210、外部出力との電気的変換を行う出力回路220により実現することができる。また、図2に示される通信処理部25の機能は、図3に示されるように、通信処理の全体を統括する通信用MPU251、通通信用MPU251の指令を受けてトランシーバ253を制御する通信用ASIC252、通信物理層を構成するトランシーバ253、及び通信用MPU251と制御用MPU241との間のデータのやり取りを仲介するデュアルポートRAM(DP−RAM)254により構成することができる。
【0059】
さらに、図2に示される制御部24の機能は、スレーブ全体の動作を統括制御する制御用MPU241、制御用MPU241が実行すべきプログラムを格納するプログラム格納用メモリ242、プログラムの実行の際に参照される各種のパラメータを格納するパラメータ格納用メモリ243、及び制御用MPU241が各種のプログラムを実行する際のワークエリアとして使用されるワークメモリ244により構成することができる。ここで、プログラム格納用メモリ242には、投受光タイミング制御手段として機能する投受光タイミング制御プログラム24−2が格納される。また、パラメータ格納用メモリ243には、のちに詳述するパラメータα、βが格納される。さらに、ワークメモリ244のワーク検出接点領域244aには、相互干渉防止機能の作動下において、各対応する透過型光電センサ2−1,2−2,・・・2−Nのワーク検出接点の動作状態が格納される。
【0060】
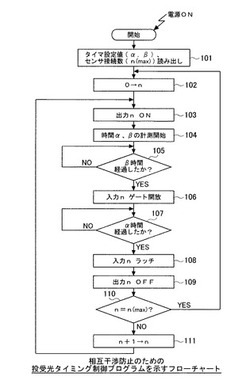
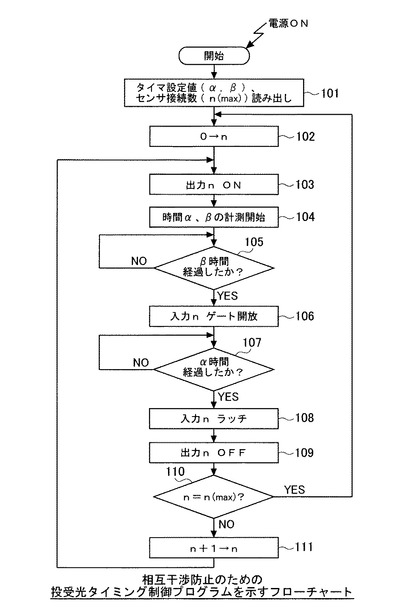
次に、相互干渉防止のための投受光タイミング制御プログラム24−2の内容を示すフローチャートが図4に示されている。この投受光タイミング制御プログラムは、それぞれ投光停止中に対応する第1の論理状態(“H”)期間と投光中に対応する第2の論理状態(“L”)期間(α)msとを交互に繰り返し、かつ投光中に対応する第2の論理状態(“L”)期間(α)が信号相互間で重ならないように移相された複数系統の投光制御信号が、前記各投光器の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、前記出力処理部へと対応する出力データを与える投光タイミング制御処理(ステップ103,104,107,109)と、各投光器と対をなす受光器のそれぞれから、各対応する投光器の投光制御信号の第2の論理状態期間(α)内であって、期間(α)の開始から投受光間伝達遅れ相当期間(β)ms経過後の受光出力信号のみが、各受光器の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御する受光タイミング制御処理(ステップ104,105,106,108)とを含んで構成されている。
【0061】
同図において、電源ONにより処理が開始されると、先ず、イニシャル処理として、タイマ設定値(α、β)及びセンサ接続数(n(max))を読み出したのち、センサポインタnの値を0から1つずつインクリメントしては(ステップ102,111)、一連の処理(ステップ103〜109)を繰り返し実行すると共に、センサポインタnの値がセンサ接続数(n(max))に達したならば(ステップ110YES)、再びセンサポインタnの値を0に戻したのち(ステップ102)、以上の一連の処理(ステップ102〜109)を繰り返す。
【0062】
上記の一連の処理(ステップ102〜109)は、センサポインタnで指定されるセンサに対応する出力端子の出力信号をOFF(“H”状態)からON(“L”状態)とすることにより、センサポインタnで指定されるセンサを投光停止状態から投光状態へと切り替え、同時に時間α、βの計測を開始する第1段階の処理(ステップ103,104)と、投受光器間信号遅れ時間に相当する時間βが経過するのを待って、センサポインタnで指定されるセンサの入力ゲートを開く第2段階の処理(ステップ105,106)と、投光期間に相当する時間αが経過するのを待って、センサポインタnで指定されるセンサに対応する入力端子の入力信号をラッチし、同時にセンサポインタnで指定されるセンサに対応する出力端子の出力信号をON(“L”)からOFF(“H”)とすることにより、センサポインタnで指定されるセンサを投光状態から投光停止状態へと復帰させる第3段階の処理(ステップ107,108,109)とから構成されている。
【0063】
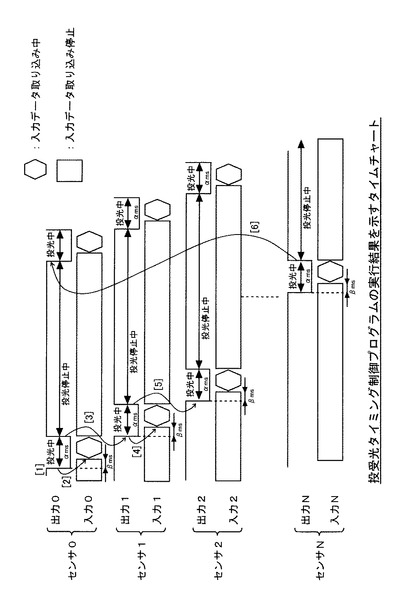
投受光タイミング制御プログラムの実行結果を示すタイムチャートが図5に示されている。同図に示されるように、投受光タイミング制御プログラムが実行されると、各投光器ST(0)〜ST(N)の投光制御端子へと接続されるべき複数の出力端子(出力0〜N)のそれぞれには、投光停止中に対応する“H”期間と投光中に対応する“L”期間((α)ms)とを交互に繰り返し、かつ投光中に対応する“L”期間((α)ms)が信号相互間で重ならないように移相された複数系統の投光制御信号が出力される。
【0064】
一方、各受光器SR(0)〜SR(N)の受光出力端子へと接続されるべき複数の入力端子(入力0〜N)のそれぞれからは、各対応する投光器の投光制御信号の“L”期間((α)ms)内であって、“L”期間((α)ms)の開始から投受光間伝達遅れ相当期間((β)ms)経過後の受光出力信号のみが取り込まれ、かつ投光制御信号の“L”期間((α)ms)の終了時の信号がラッチ(保持)される。
【0065】
そして、このラッチされた受光出力信号は、図3に示されるワークメモリ244のワーク検出接点領域244a内のセンサポインタnで指定されるアドレス(ビット)に、各対応するセンサ2−1,2−2,・・・2−Nのワーク検出接点の動作状態として格納される。なお、受光出力信号のラッチタイミングは、各対応する投光器の投光制御信号の“L”期間((α)ms)内であって、“L”期間((α)ms)の開始から投受光間伝達遅れ相当期間((β)ms)経過後の期間であれば、どのタイミングでも良いであろう。
【0066】
こうして、ワーク検出接点領域244a内に格納された各センサ2−1,2−2,・・・2−Nのワーク検出接点24aの動作状態は、例えば、予め決められた送信タイミング(タイマ管理、イベント管理の双方を含む)の到来を待って、或いは通信マスタユニット13から送信リクエストが到来するのを待って、ネットワーク3を介する通信により、通信マスタユニット13へと送られ、さらに、前述のように、入力更新処理によって転送仲介メモリを介してCPUユニット12へと転送されることとなる。
【0067】
以上の実施形態によれば、スレーブのプログラム格納用メモリ242に格納された投受光タイミング制御プログラム24−2を制御用MPU241が実行することで、複数のセンサ間における相互干渉防止機能が、PLC1からの指令を待つことなく、スレーブ独自に実現されるため、PLC1の側ではワーク検出接点領域244aから読み出されかつ通信を介してスレーブから送られてくる所望のセンサに関するワーク検出接点の動作状態を取得するだけで済み、ユーザプログラム中に相互干渉防止のための投受光タイミング制御機能を組み込むことが不要となり、この種の複数の透過型光電センサを含むセンシングシステム取り扱いが容易となる利点がある。
【0068】
また、上記のパラメータα、βはパラメータメモリ243に格納されると共に、ツールI/F回路230を介して所定のツールにて任意に書換可能とされているため、使用される透過型センサの特性に合わせてパラメータα、βの値を任意に変更することができ、しかもその際には、PLCのユーザプログラムに組み込みかつスレーブを介して伝達する従来例のように、理論上の遅れ時間に加えて、PLCのサイクルタイムに起因する時間誤差とCPUユニットとスレーブとの間の通信処理に起因する時間誤差との双方を考慮する必要もなく、そのため、理論通りの遅れ時間βを設定するだけで、所望の相互干渉防止機能を確実に実現することができる。
【0069】
なお、本発明に係るスレーブの運用方法の一例としては、例えば、投受光タイミング制御プログラム24−2の全体については、ユーザ側の仕様に基づいて予め出荷時にメーカサイドで組み込む一方、パラメータα、βについては、ユーザ側で任意に書き換え可能とすることが考えられる。
【産業上の利用可能性】
【0070】
この発明によれば、透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となる。
【図面の簡単な説明】
【0071】
【図1】本発明スレーブが適用されたセンシングシステムの構成図である。
【図2】本発明スレーブの機能構成図である。
【図3】本発明スレーブのハードウェア構成図である。
【図4】相互干渉防止のための投受光タイミング制御プログラムを示すフローチャートである。
【図5】投受光タイミング制御プログラムの実行結果を示すタイムチャートである。
【図6】単独型センサ使用の透過型光電センサシステムの応用例(ワーク高さ判定用)である。
【図7】判定誤りが生ずる例(対策なしの場合)である。
【図8】判定誤りが生ずる例(対策ありの場合)である。
【図9】投受光タイミング同期による誤判定防止対策の説明図(連結型センサ使用の場合)である。
【図10】投受光タイミング同期による誤判定防止対策の説明図(PLC直結の場合)である。
【図11】投受光タイミング同期による誤判定防止対策の説明図(スレーブを介してPLCと結合する場合)である。
【図12】従来スレーブの構成図である。
【符号の説明】
【0072】
1 PLC
2 スレーブ
2−1 第1スレーブ
2−2 第2スレーブ
2−M 第Mスレーブ
3 ネットワーク
11 電源ユニット
12 CPUユニット
13 通信マスタユニット
14 I/Oユニット
21 入力処理部
22 出力処理部
23 ツールI/F
24 制御部
24a ワーク検出接点
24−2 投受光タイミング制御プログラム
24−3 パラメータ
210 入力回路
220 出力回路
230 ツールI/F回路
241 制御用MPU
242 プログラム格納用メモリ
243 パラメータ格納用メモリ
244 ワークメモリ
244a ワーク検出接点領域
25 通信処理部
251 通信用MPU
252 通信用ASIC
253 トランシーバ
254 デュアルポートRAM(DP−RAM)
ST(1)〜(M) 投光器
SR(1)〜(M) 受光器
IN 入力端子台
OUT 出力端子台
IN(1)〜(M) 入力端子
OUT(1)〜(M) 出力端子
【技術分野】
【0001】
この発明は、プログラマブル・コントローラ(以下、PLCと言う)と通信を介して結ばれて入出力ターミナルとして機能するリモート入出力ターミナル(以下、スレーブと言う)に係り、特に、複数の透過型光電センサが接続されるPLCのスレーブに関する。
【背景技術】
【0002】
当業者にはよく知られているように、透過型光電センサを複数備えてワークの有無等の判定を行うようにした透過型光電センサシステムにあっては、ある透過型光電センサの受光器に他の透過型光電センサの投光器からの光が入射されること(一般に、「相互干渉」と言う)に起因して、ワークの有無等の誤判定が生ずる場合がある(特許文献1参照)。
【0003】
単独型センサ使用の透過型光電センサシステムの応用例(ワークの高さ検出用)が図6に示されている。このセンサシステムには、4台の透過型光電センサ(以下、単に「センサ」という)が含まれている。第1乃至第4のセンサは、それぞれ投光器ST(1)〜(4)と受光器SR(1)〜(4)とを有する。図示例では、4台の投光器ST(1)〜(4)と4台の受光器SR(1)〜(4)とは、ワークWの搬送路を挟んで、同一センサ同士が対向するようにして、上下方向に所定間隔を隔てて配置されている。すなわち、4台の投光器ST(1)〜(4)はワークの搬送路の図中左側に、4台の受光器SR(1)〜(4)は搬送路の図中右側にそれぞれまとめて配置されている。このような構成によれば、4台の受光器SR(1)〜(4)のうちで、下から連続する幾つまでがONするかによって、ワークWの高さを5段階に判定することができる。
【0004】
判定誤りが生ずる例(対策なしの場合)が図7に示されている。このように、第1のセンサの投光器ST(1)からの光が拡散して第2のセンサの受光器SR(2)に入射されると、第2のセンサの投光器ST(2)からの光はワークWにより遮られているにも拘わらず、第2のセンサの受光器SR(2)が上記の拡散光を受光することによりOFFとなってしまい、ワークWの高さ判定を誤る結果となる。
【0005】
判定誤りが生ずる例(対策ありの場合)が図8に示されている。このように、対をなす投光器STと受光器SRとの配置を1つおきに左右逆にしたとしても、第1のセンサの投光器ST(1)からの光がより広く拡散して第3のセンサの受光器SR(3)に入射されると、第3のセンサの投光器ST(3)からの光はワークWにより遮られているにも拘わらず、第3のセンサの受光器SR(3)が上記の拡散光を受光することによりOFFとなってしまい、やはり、ワークWの高さ判定を誤る結果となる。
【0006】
投受光タイミング同期による誤判定防止対策の説明図(連結型センサ使用の場合)が図9に示されている。この例にあっては、単独型センサに代えて連結型センサが採用されている。各連結型センサは、互いに対をなす連結型投光器SSTと連結型受光器SSRとから構成される。連結型投光器SSTは一連に連結された4個の投光器ST(1)〜(4)と、それらの投光器を順に1つずつ動作させる投光タイミング制御器CTとを有する。連結型受光器SSRは一連に連結された4個の受光器SR(1)〜(4)と、それらの受光器を順に1つずつ動作させる受光タイミング制御器CRとを有する。
【0007】
このような連結型センサを採用した例によれば、所謂同期検波の技術が応用されているため、各受光器SR(1)〜(4)のそれぞれは、対面する各投光器ST(1)〜(4)が投光中でない限り、その受光出力信号が取り込まれることはないから、対面する以外の投光器からの拡散光が入射されても、ワークWの高さ判定を誤ることはない。しかし、この連結型センサを使用する例にあっては、配線工数の増大並びにセンサ自体の価格が高価なことから、コストアップが招来されると言う問題がある。
【0008】
投受光タイミング同期による誤判定防止対策の説明図(PLC直結の場合)が図10に示されている。この例にあっては、第1乃至第4のセンサは、制御盤内に配置されたPLC1によって投受光タイミングの同期が取られる。PLC1はこの例ではビルディングブロック型のものとされ、バックプレーン上に装着される各種のユニットの中で、CPUユニット12、出力ユニット14a、及び入力ユニット14bのみが図示されている。
【0009】
出力ユニット14aは、一連の出力端子を有する出力用端子台を有する。この出力用端子台の各出力端子には、多芯ケーブルCV1を介して、各投光器ST(1)〜(4)の投光制御端子が接続される。入力ユニット14bは、一連の入力端子を有する入力用端子台を有する。この入力用端子台の各入力端子には、多芯ケーブルCV2を介して、各受光器SR(1)〜(4)の受光出力端子が接続される。それらの出力ユニット14a及び入力ユニット14bは、図示しないバックプレーン上に敷設されたシステムバスを介して、CPUユニット12との間で入出力データのやりとりが可能とされている。
【0010】
CPUユニット12内には、例えば、ユーザプログラムを格納するためのユーザメモリと、入出力データを格納するための入出力メモリと、ユーザプログラム実行機能が組み込まれたASICと、ユニット全体を統括制御するためのマイクロプロセッサと、マイクロプロセッサが実行すべきシステムプログラムを格納するためのシステムメモリと、マイクロプロセッサが各種のプログラムを実行するためのワークエリアとして使用されるワークメモリ等が設けられている。
【0011】
マイクロプロセッサは、システムメモリに格納されたシステムプログラムを実行することにより、動作モードがRUNモードの場合には、入出力更新処理と、ユーザプログラム実行処理と、周辺サービス処理とを1サイクルとして、これらの処理を繰り返し実行するように仕組まれている。
【0012】
ここで、当業者にはよく知られているように、入出力更新処理とは、入力ユニット14bから取り込まれた(通信マスタユニットが存在するときには、通信ユニットからの入力データの取り込みも含む)入力データを入出力メモリの入力領域に書き込む入力更新処理と、入出力メモリの出力エリアから読み出された出力データを出力ユニット14aに送り出す(通信マスタユニットが存在するときには、通信ユニットへの出力データの送り出しも含む)出力更新処理とから構成されている。
【0013】
ユーザプログラム実行処理とは、ユーザメモリからユーザプログラムを構成する各命令語を順次に読み出すと共に、これを入出力メモリに格納される入出力データを参照して実行し、その実行結果で入出力メモリの内容を書き換えると言った一連の処理により構成されている。なお、周辺サービス処理とは、ツール装置との間でデータのやり取りを行ったり、ネットワークを介して他のPLCとのデータのやり取りを行ったりする処理などで構成される。
【0014】
一方、ユーザメモリに格納されるべきラダー図言語等で記述されるユーザプログラムとしては、複数のセンサ間における相互干渉を回避しつつ、各センサの受光器からの受光出力信号を取り込むように仕組まれた投受光タイミング制御プログラムが採用される。この投受光タイミング制御プログラムは、投光タイミング制御機能と受光タイミング制御機能とを含んで構成される。
【0015】
投光タイミング制御機能は、複数系統の投光制御信号が、各投光器ST(1)〜(4)の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、出力ユニット14aへと対応する出力データを与えるように仕組まれている。これら複数系統の投光制御信号のそれぞれは、投光停止中に対応する第1の論理状態期間と投光中に対応する第2の論理状態期間(α)とを交互に繰り返すものであり、かつ投光中に対応する第2の論理状態期間(α)が投光制御信号相互間で重ならないように移相されている。
【0016】
受光タイミング制御機能は、各投光器と対をなす受光器のそれぞれから、各対応する投光器ST(1)〜(4)の投光制御信号の第2の論理状態期間(α)内であって、期間(α)の開始から投受光間伝達遅れ相当期間(β)経過後の受光出力信号のみが、各受光器SR(1)〜(4)の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御するように仕組まれている。
【0017】
このような投受光タイミング制御プログラムが組み込まれたPLC1を有するセンシングシステムによれば、同期検波の技術が応用されているため、各受光器SR(1)〜(4)のそれぞれは、対面する各投光器ST(1)〜(4)が投光中でない限り、その受光出力信号が取り込まれることはないから、対面する以外の投光器からの拡散光が入射されても、ワークWの高さ判定を誤ることはない。しかも、この例にあっては、単独型のセンサをそのまま使用することができるため、センサ価格に起因するコストアップについては回避することができる。
【0018】
しかし、この例にあっては、複数のセンサのそれぞれとPLC1の出力ユニット14a、入力ユニット14bとを多芯ケーブルで直結せねばならないから、センサとPLCとが大きく離隔されている場合には、多芯ケーブルによる配線引き回し並びに配線工数の増大によりコストアップが招来されると言う問題点がある。
【特許文献1】特開平10−32479号公報
【発明の開示】
【発明が解決しようとする課題】
【0019】
投受光タイミング同期による誤判定防止対策の説明図(スレーブを介してPLCと接続する場合)が図11に示されている。この例にあっては、第1乃至第4のセンサは、直接にではなくて、スレーブ2を介して、制御盤内に配置されたPLC1によって投受光タイミングの同期が取られる。PLC1は、この例にあっても、ビルディングブロック型のものとされ、バックプレーン上に装着される各種のユニットの中で、CPUユニット12と通信マスタユニット13のみが図示されている。
【0020】
なお、CPUユニット12の内部構成については、先に図10を参照して説明した通りである。また、ユーザメモリに格納されるべきユーザプログラムとしては、図10を参照して説明したように、複数のセンサ間における干渉を回避しつつ、各センサの受光器からの受光出力信号を取り込むように仕組まれた投受光タイミング制御プログラムが採用される。
【0021】
通信マスタユニット13は、当業者にはよく知られているように、バックプレーン上に敷設されたシステムバスを介してCPUユニット12との間で入出力データのやり取りを行う一方、ネットワーク3を介して通信によりスレーブ2との間で入出力データのやり取りを行うように構成されている。ここで、CPUユニット12との間の入出力データのやり取りは、CPUユニット12の側で実行される入出力更新処理のタイミングに依存される。一方、スレーブ2との間における通信による入出力データのやり取りは、CPUユニット12の側における入出力更新処理のタイミングとは非同期のタイミングにて実行される。
【0022】
従来スレーブの構成図が図12に示されている。同図(a)は機能構成図、同図(b)はハードウェア構成図である。スレーブ2は、同図(a)に示されるように、PLC1の通信マスタユニット13との間でネットワーク3を介して入出力データのやり取りを行うための通信処理部25と、複数の透過型光電センサの各投光器ST(1)〜(4)の投光制御端子のそれぞれへと接続されるべき複数の出力端子を含む出力端子台OUT(図11参照)と、複数の透過型光電センサの各受光器SR(1)〜(4)の受光出力端子のそれぞれへと接続されるべき複数の入力端子を含む入力端子台IN(図11参照)と、与えられた出力データに基づいて出力信号を生成し、これを出力端子台OUTの該当する出力端子から外部へと送出する出力処理部22と、入力端子台INを構成する入力端子へと外部から入力される入力信号を取り込んで対応する入力データを生成する入力処理部21とを含んで構成されている。
【0023】
より具体的には、同図(b)に示されるように、上記の入力処理部21の機能が外部入力との電気的な変換を行うための入力回路210により実現され、上記の出力処理部22の機能が外部出力との電気的な変換を行うための出力回路220により実現され、さらに通信処理部25の機能が通信用MPU251、通信用ASIC252、及びトランシーバ253により実現される。
【0024】
このような投受光タイミング制御プログラムが組み込まれたPLC1及びスレーブ2を有するセンシングシステムによれば、同期検波の技術が応用されているため、各受光器SR(1)〜(4)のそれぞれは、対面する各投光器ST(1)〜(4)が投光中でない限り、その受光出力信号が取り込まれることはないから、対面する以外の投光器からの拡散光が入射されても、ワークWの高さ判定を誤ることはない。また、この例にあっても、単独型のセンサをそのまま使用することができるため、センサ価格に起因するコストアップについては回避することができる。しかも、複数のセンサのそれぞれとPLC1の通信マスタユニット13との間にあって、センサの間近には、スレーブ2が介在されているため、センサとPLCとが大きく離隔されている場合にも、多芯ケーブルによる配線引き回しはスレーブ2までで極力短くて済むと共に、スレーブ2と通信マスタユニット13との間は通信ケーブルにて結ばれるため、多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについてはも回避することができる。
【0025】
しかしながら、このような投受光タイミング制御プログラムが組み込まれたPLC1及びスレーブ2を有するセンシングシステムにおいては、CPUユニット12と通信マスタユニット13との間の入出力データのやり取りは、CPUユニット12の側で実行される入出力更新処理のタイミングに依存される一方、通信マスタユニット13とスレーブ2との間における通信による入出力データのやり取りは、CPUユニット12の側における入出力更新処理のタイミングとは非同期のタイミングにて実行されるため、各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を適切に設定するためには、ユーザプログラム中において、理論上の遅れ時間に加えて、サイクルタイムに起因する時間誤差と通信処理に起因する時間誤差との双方を考慮してプログラミングを行わねばならず、相互干渉防止のためのプログラミングが極めて煩雑であるという問題点があった。
【0026】
この発明は、上述の問題点に着目してなされたものであり、その目的とするところは、透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となるようにしたPLCのスレーブを提供することにある。
【0027】
この発明のさらに他の目的並びに作用効果については、明細書の以下の記述を参照することにより、当業者であれば容易に理解されるであろう。
【課題を解決するための手段】
【0028】
上述の技術的な課題は、以下の構成を有するPLCのスレーブにより解決することができると考えられる。
【0029】
すなわち、この発明のPLCのスレーブは、通信処理部と、出力端子台と、入力端子台と、出力処理部と、入力処理部と、制御部とを含んで構成される。
【0030】
ここで、通信処理部は、PLCとの間でネットワークを介して入出力データのやり取りを行うためのものである。出力端子台は、複数の透過型光電センサの各投光器の投光制御端子のそれぞれへと接続されるべき複数の出力端子を含んでいる。入力端子台は、複数の透過型光電センサの各受光器の受光出力端子のそれぞれへと接続されるべき複数の入力端子を含んでいる。出力処理部は、与えられた出力データに基づいて出力信号を生成し、これを出力端子台の該当する出力端子から外部へと送出する。入力処理部は、入力端子台を構成する入力端子へと外部から入力される入力信号を取り込んで対応する入力データを生成する。
【0031】
以上の基本的な構成に加えて、制御部には、投受光タイミング制御手段と、ワーク検出接点メモリとが設けられている。
【0032】
ここで、投受光タイミング制御手段は、PLCからの指示を待つことなく、出力処理部への出力データの送出タイミングと入力処理部からの入力データ取込タイミングとを制御する。
【0033】
ワーク検出接点メモリは、投受光タイミング制御手段の作動下において、入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶する。
【0034】
このような構成によれば、投受光タイミング制御手段は、PLCからの指示を待つことなく、複数の透過型光電センサの各対をなす投光器と受光器との間における相互干渉防止のための投受光同期をスレーブ独自に実現するために、出力処理部への出力データの送出タイミングと入力処理部からの入力データ取込タイミングとを制御する一方、ワーク検出接点メモリは、投受光タイミング制御手段の作動下において、入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶するため、PLCの側では、干渉防止のための指示をスレーブ側へと与えることなく、単に、ワーク検出接点メモリの内容を参照するだけで、干渉防止機能の作動下において、各対応する透過型光電センサのワーク検出接点の動作状態を取得することができる。
【0035】
そのため、本発明のスレーブによれば、センシングシステムを構成する複数の透過型センサの側に配置して、通信を介してPLCと接続することにより、相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となると言う利点がある。
【0036】
好ましい実施形態においては、投受光タイミング制御手段を、それぞれ所定の構成を有する投光タイミング制御手段と受光タイミング制御手段とで構成することができる。
【0037】
この場合、投光タイミング制御手段は、それぞれ投光停止中に対応する第1の論理状態期間と投光中に対応する第2の論理状態期間(α)とを交互に繰り返し、かつ投光中に対応する第2の論理状態期間(α)が信号相互間で重ならないように移相された複数系統の投光制御信号が、前記各投光器の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、前記出力処理部へと対応する出力データを与える。
【0038】
受光タイミング制御手段は、各投光器と対をなす受光器のそれぞれから、各対応する投光器の投光制御信号の第2の論理状態期間(α)内であって、かつ期間(α)の開始から投受光間伝達遅れ相当期間(β)経過後の受光出力信号のみが、各受光器の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御する。
【0039】
このような構成によれば、複数の透過型センサを有するセンシングシステムにおいて、投光期間同士が重なることが無く、しかも受光期間については、投受光器間の信号伝達遅れを考慮して、投光に基づく受光信号が確実に受光されて取り込まれるため、信頼性の高いセンシング動作を実現することができる。
【0040】
好ましい実施形態においては、第2の論理状態期間(α)、及び投受光間伝達遅れ相当期間(β)は、任意に変更可能なパラメータとして所定のパラメータ格納用メモリに格納されている。
【0041】
このような構成によれば、上述のパラメータ格納用メモリに格納されたパラメータα、βの値を任意に所定のツールで書き換えることで、各々のセンシングシステムに特化した最適な運用が可能となる。
【発明の効果】
【0042】
この発明によれば、透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となると言った利点がある。
【発明を実施するための最良の形態】
【0043】
以下にこの発明に係るPLCのスレーブの好適な実施の一形態を添付図面を参照しながら詳細に説明する。
【0044】
本発明スレーブが適用されたセンシングシステムの構成図が図1に示されている。同図に示されるように、このセンシングシステムは、1台のPLC1とN台のスレーブ2−1,2−2,・・・2−Nとをネットワーク3で結んで構成されている。
【0045】
この例では、PLC1としてはビルディングブロック型のものが採用されている。図示例のPLC1は、システムバスが敷設されたバックプレーン上に、電源ユニット11、CPUユニット12、通信マスタユニット13、及び2台のI/Oユニット14,14をコネクタ接続することにより構成されており、電源ユニット11はシステムバス上の電源ラインを介して各ユニット12〜14へと電源を供給している。
【0046】
CPUユニット12は、PLC1の全体を統括制御するものであり、先に説明したように、その内部には、ユーザプログラムを格納するためのユーザメモリと、入出力データを格納するための入出力メモリと、ユーザプログラム実行機能が組み込まれたASICと、ユニット全体を統括制御するためのマイクロプロセッサと、マイクロプロセッサが実行すべきシステムプログラムを格納するためのシステムメモリと、マイクロプロセッサが各種のプログラムを実行するためのワークエリアとして使用されるワークメモリ等が設けられている。
【0047】
マイクロプロセッサは、システムメモリに格納されたシステムプログラムを実行することにより、動作モードがRUNモードの場合には、入出力更新処理と、ユーザプログラム実行処理と、周辺サービス処理とを1サイクルとして、これらの処理を繰り返し実行するように仕組まれている。
【0048】
ここで、当業者にはよく知られているように、入出力更新処理とは、入出力ユニット14及び通信マスタユニット13から取り込まれた入力データを入出力メモリの入力領域に書き込む入力更新処理と、入出力メモリの出力エリアから読み出された出力データを入出力ユニット14及び通信マスタユニット13へと送り出す出力更新処理とから構成されている。
【0049】
ユーザプログラム実行処理とは、ユーザメモリからユーザプログラムを構成する各命令語を順次に読み出すと共に、これを入出力メモリに格納される入出力データを参照して実行し、その実行結果で入出力メモリの内容を書き換えると言った一連の処理により構成されている。
【0050】
なお、周辺サービス処理とは、図示しないツール装置との間でデータのやり取りを行ったり、ネットワークを介して他のPLCとの通信を介してデータのやり取りを行ったりする処理などで構成される。
【0051】
通信マスタユニットは、ネットワーク3を介して各スレーブ2−1,2−2,・・・2−Nとの間で入出力データのやり取りを行うための通信処理部と、CPUユニット11との間でバックプレーン上のシステムバスを介してハンドシェイク処理によりデータのやり取りを行うための転送仲介メモリ(一般に、デュアルポートメモリで構成される)と、ユニット全体を統括制御するためのマイクロプロセッサを含んで構成される。
【0052】
先に説明した出力更新処理においては、転送仲介メモリには、通信を介してスレーブ2−1,2−2,・・・2−Nのいずれかへと送信されるべき出力データが、CPUユニット12側の制御で書き込まれる。こうして転送仲介メモリの所定領域に格納された出力データは、随時又は所定のタイミングで、転送仲介メモリの所定領域から読み出され、ネットワーク3を介する通信により、スレーブ2−1,2−2,・・・2−Nのうちの該当するものへと送られる。
【0053】
一方、ネットワーク3を介する通信によりスレーブ2−1,2−2,・・・2−Nのいずれかから受信された入力データは、転送仲介メモリの所定領域に書き込まれる。こうして転送仲介メモリの所定領域に書き込まれた入力データは、先に説明した入力更新処理において、CPUユニット12側の制御で読み出され、CPUユニット12内の入出力メモリの入力領域に書き込まれる。
【0054】
このようにして、入出力更新処理に際して、CPUユニット12と通信マスタユニット13との間で、転送仲介メモリを介して入出力データのやり取りが行われ、随時又は所定のタイミングにて、通信マスタユニット13と各スレーブ2−1,2−2,・・・2−Nとの間において、ネットワーク3を経由する通信を介して、入出力データのやり取りが行われる。
【0055】
次に、本発明の要部であるスレーブ2−1,2−2,・・・2−Nの構成について詳細に説明する。本発明スレーブの機能構成図が図2に、ハードウェア構成図が図3にそれぞれ示されている。
【0056】
図1と図2とを参照して明らかなように、N台のスレーブ2−1,2−2,・・・2−Nのそれぞれは、PLC1(正確には、PLC1の通信マスタユニット13)との間でネットワーク3を介して入出力データのやり取りを行うための通信処理部25と、複数(この例ではM台)の透過型光電センサの各投光器ST(1)〜(M)の投光制御端子のそれぞれへと接続されるべき複数(M個)の出力端子OUT1〜Mを含む出力端子台OUTと、複数の透過型光電センサの各受光器SR(1)〜(M)の受光出力端子のそれぞれへと接続されるべき複数の入力端子IN1〜Mを含む入力端子台INと、与えられた出力データに基づいて出力信号を生成し、これを出力端子台OUTの該当する出力端子OUT1〜Mから外部へと送出する出力処理部22と、入力端子台INを構成する入力端子IN1〜Mへと外部から入力される入力信号を取り込んで対応する入力データを生成する入力処理部21と、スレーブ2の全体を統括する制御部24とを含んで構成される。
【0057】
制御部24には、PLC1からの指示を待つことなく、複数(M個)の透過型光電センサの各対をなす投光器ST(1)〜(M)と受光器SR(1)〜(M)との間における相互干渉防止のための投受光同期をスレーブ独自に実現するために、出力処理部22への出力データの送出タイミングと入力処理部21からの入力データ取込タイミングとを制御する投受光タイミング制御手段として機能するプログラム24−2と、投受光タイミング制御手段の作動下において、入力処理部21を介して複数の入力端子IN1〜Mのそれぞれから取り込まれる入力データに相当するワーク検出接点24aと、のちに詳述するパラメータ24−3とが含まれている。
【0058】
より具体的には、図2に示される入力処理部21、出力処理部22の機能は、図3に示されるように、外部入力との電気的変換を行う入力回路210、外部出力との電気的変換を行う出力回路220により実現することができる。また、図2に示される通信処理部25の機能は、図3に示されるように、通信処理の全体を統括する通信用MPU251、通通信用MPU251の指令を受けてトランシーバ253を制御する通信用ASIC252、通信物理層を構成するトランシーバ253、及び通信用MPU251と制御用MPU241との間のデータのやり取りを仲介するデュアルポートRAM(DP−RAM)254により構成することができる。
【0059】
さらに、図2に示される制御部24の機能は、スレーブ全体の動作を統括制御する制御用MPU241、制御用MPU241が実行すべきプログラムを格納するプログラム格納用メモリ242、プログラムの実行の際に参照される各種のパラメータを格納するパラメータ格納用メモリ243、及び制御用MPU241が各種のプログラムを実行する際のワークエリアとして使用されるワークメモリ244により構成することができる。ここで、プログラム格納用メモリ242には、投受光タイミング制御手段として機能する投受光タイミング制御プログラム24−2が格納される。また、パラメータ格納用メモリ243には、のちに詳述するパラメータα、βが格納される。さらに、ワークメモリ244のワーク検出接点領域244aには、相互干渉防止機能の作動下において、各対応する透過型光電センサ2−1,2−2,・・・2−Nのワーク検出接点の動作状態が格納される。
【0060】
次に、相互干渉防止のための投受光タイミング制御プログラム24−2の内容を示すフローチャートが図4に示されている。この投受光タイミング制御プログラムは、それぞれ投光停止中に対応する第1の論理状態(“H”)期間と投光中に対応する第2の論理状態(“L”)期間(α)msとを交互に繰り返し、かつ投光中に対応する第2の論理状態(“L”)期間(α)が信号相互間で重ならないように移相された複数系統の投光制御信号が、前記各投光器の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、前記出力処理部へと対応する出力データを与える投光タイミング制御処理(ステップ103,104,107,109)と、各投光器と対をなす受光器のそれぞれから、各対応する投光器の投光制御信号の第2の論理状態期間(α)内であって、期間(α)の開始から投受光間伝達遅れ相当期間(β)ms経過後の受光出力信号のみが、各受光器の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御する受光タイミング制御処理(ステップ104,105,106,108)とを含んで構成されている。
【0061】
同図において、電源ONにより処理が開始されると、先ず、イニシャル処理として、タイマ設定値(α、β)及びセンサ接続数(n(max))を読み出したのち、センサポインタnの値を0から1つずつインクリメントしては(ステップ102,111)、一連の処理(ステップ103〜109)を繰り返し実行すると共に、センサポインタnの値がセンサ接続数(n(max))に達したならば(ステップ110YES)、再びセンサポインタnの値を0に戻したのち(ステップ102)、以上の一連の処理(ステップ102〜109)を繰り返す。
【0062】
上記の一連の処理(ステップ102〜109)は、センサポインタnで指定されるセンサに対応する出力端子の出力信号をOFF(“H”状態)からON(“L”状態)とすることにより、センサポインタnで指定されるセンサを投光停止状態から投光状態へと切り替え、同時に時間α、βの計測を開始する第1段階の処理(ステップ103,104)と、投受光器間信号遅れ時間に相当する時間βが経過するのを待って、センサポインタnで指定されるセンサの入力ゲートを開く第2段階の処理(ステップ105,106)と、投光期間に相当する時間αが経過するのを待って、センサポインタnで指定されるセンサに対応する入力端子の入力信号をラッチし、同時にセンサポインタnで指定されるセンサに対応する出力端子の出力信号をON(“L”)からOFF(“H”)とすることにより、センサポインタnで指定されるセンサを投光状態から投光停止状態へと復帰させる第3段階の処理(ステップ107,108,109)とから構成されている。
【0063】
投受光タイミング制御プログラムの実行結果を示すタイムチャートが図5に示されている。同図に示されるように、投受光タイミング制御プログラムが実行されると、各投光器ST(0)〜ST(N)の投光制御端子へと接続されるべき複数の出力端子(出力0〜N)のそれぞれには、投光停止中に対応する“H”期間と投光中に対応する“L”期間((α)ms)とを交互に繰り返し、かつ投光中に対応する“L”期間((α)ms)が信号相互間で重ならないように移相された複数系統の投光制御信号が出力される。
【0064】
一方、各受光器SR(0)〜SR(N)の受光出力端子へと接続されるべき複数の入力端子(入力0〜N)のそれぞれからは、各対応する投光器の投光制御信号の“L”期間((α)ms)内であって、“L”期間((α)ms)の開始から投受光間伝達遅れ相当期間((β)ms)経過後の受光出力信号のみが取り込まれ、かつ投光制御信号の“L”期間((α)ms)の終了時の信号がラッチ(保持)される。
【0065】
そして、このラッチされた受光出力信号は、図3に示されるワークメモリ244のワーク検出接点領域244a内のセンサポインタnで指定されるアドレス(ビット)に、各対応するセンサ2−1,2−2,・・・2−Nのワーク検出接点の動作状態として格納される。なお、受光出力信号のラッチタイミングは、各対応する投光器の投光制御信号の“L”期間((α)ms)内であって、“L”期間((α)ms)の開始から投受光間伝達遅れ相当期間((β)ms)経過後の期間であれば、どのタイミングでも良いであろう。
【0066】
こうして、ワーク検出接点領域244a内に格納された各センサ2−1,2−2,・・・2−Nのワーク検出接点24aの動作状態は、例えば、予め決められた送信タイミング(タイマ管理、イベント管理の双方を含む)の到来を待って、或いは通信マスタユニット13から送信リクエストが到来するのを待って、ネットワーク3を介する通信により、通信マスタユニット13へと送られ、さらに、前述のように、入力更新処理によって転送仲介メモリを介してCPUユニット12へと転送されることとなる。
【0067】
以上の実施形態によれば、スレーブのプログラム格納用メモリ242に格納された投受光タイミング制御プログラム24−2を制御用MPU241が実行することで、複数のセンサ間における相互干渉防止機能が、PLC1からの指令を待つことなく、スレーブ独自に実現されるため、PLC1の側ではワーク検出接点領域244aから読み出されかつ通信を介してスレーブから送られてくる所望のセンサに関するワーク検出接点の動作状態を取得するだけで済み、ユーザプログラム中に相互干渉防止のための投受光タイミング制御機能を組み込むことが不要となり、この種の複数の透過型光電センサを含むセンシングシステム取り扱いが容易となる利点がある。
【0068】
また、上記のパラメータα、βはパラメータメモリ243に格納されると共に、ツールI/F回路230を介して所定のツールにて任意に書換可能とされているため、使用される透過型センサの特性に合わせてパラメータα、βの値を任意に変更することができ、しかもその際には、PLCのユーザプログラムに組み込みかつスレーブを介して伝達する従来例のように、理論上の遅れ時間に加えて、PLCのサイクルタイムに起因する時間誤差とCPUユニットとスレーブとの間の通信処理に起因する時間誤差との双方を考慮する必要もなく、そのため、理論通りの遅れ時間βを設定するだけで、所望の相互干渉防止機能を確実に実現することができる。
【0069】
なお、本発明に係るスレーブの運用方法の一例としては、例えば、投受光タイミング制御プログラム24−2の全体については、ユーザ側の仕様に基づいて予め出荷時にメーカサイドで組み込む一方、パラメータα、βについては、ユーザ側で任意に書き換え可能とすることが考えられる。
【産業上の利用可能性】
【0070】
この発明によれば、透過型光電センサを複数有するセンシングシステムにおける相互干渉の問題を投受光タイミング制御により解決することができ、センサ価格に起因するコストアップや多芯ケーブルの長距離引き回し並びに配線工数の増大によるコストアップについても回避することができ、しかも各センサのそれぞれにおいて、投光開始タイミングと受光読み取り開始タイミングとの遅れ時間との関係を設定するに際しても、PLCのユーザプログラム中においては、相互干渉防止のためのプログラムを一切組むことが不要となる。
【図面の簡単な説明】
【0071】
【図1】本発明スレーブが適用されたセンシングシステムの構成図である。
【図2】本発明スレーブの機能構成図である。
【図3】本発明スレーブのハードウェア構成図である。
【図4】相互干渉防止のための投受光タイミング制御プログラムを示すフローチャートである。
【図5】投受光タイミング制御プログラムの実行結果を示すタイムチャートである。
【図6】単独型センサ使用の透過型光電センサシステムの応用例(ワーク高さ判定用)である。
【図7】判定誤りが生ずる例(対策なしの場合)である。
【図8】判定誤りが生ずる例(対策ありの場合)である。
【図9】投受光タイミング同期による誤判定防止対策の説明図(連結型センサ使用の場合)である。
【図10】投受光タイミング同期による誤判定防止対策の説明図(PLC直結の場合)である。
【図11】投受光タイミング同期による誤判定防止対策の説明図(スレーブを介してPLCと結合する場合)である。
【図12】従来スレーブの構成図である。
【符号の説明】
【0072】
1 PLC
2 スレーブ
2−1 第1スレーブ
2−2 第2スレーブ
2−M 第Mスレーブ
3 ネットワーク
11 電源ユニット
12 CPUユニット
13 通信マスタユニット
14 I/Oユニット
21 入力処理部
22 出力処理部
23 ツールI/F
24 制御部
24a ワーク検出接点
24−2 投受光タイミング制御プログラム
24−3 パラメータ
210 入力回路
220 出力回路
230 ツールI/F回路
241 制御用MPU
242 プログラム格納用メモリ
243 パラメータ格納用メモリ
244 ワークメモリ
244a ワーク検出接点領域
25 通信処理部
251 通信用MPU
252 通信用ASIC
253 トランシーバ
254 デュアルポートRAM(DP−RAM)
ST(1)〜(M) 投光器
SR(1)〜(M) 受光器
IN 入力端子台
OUT 出力端子台
IN(1)〜(M) 入力端子
OUT(1)〜(M) 出力端子
【特許請求の範囲】
【請求項1】
PLCとの間でネットワークを介して入出力データのやり取りを行うための通信処理部と、
複数の透過型光電センサの各投光器の投光制御端子のそれぞれへと接続されるべき複数の出力端子を含む出力端子台と、
複数の透過型光電センサの各受光器の受光出力端子のそれぞれへと接続されるべき複数の入力端子を含む入力端子台と、
与えられた出力データに基づいて出力信号を生成し、これを出力端子台の該当する出力端子から外部へと送出する出力処理部と、
入力端子台を構成する入力端子へと外部から入力される入力信号を取り込んで対応する入力データを生成する入力処理部と、
制御部とを含み、
前記制御部には、
前記PLCからの指示を待つことなく、前記出力処理部への出力データの送出タイミングと前記入力処理部からの入力データ取込タイミングとを制御する投受光タイミング制御手段と、
前記投受光タイミング制御手段の作動下において、前記入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶するワーク検出接点メモリとが含まれており、
それにより、前記PLCの側では、相互干渉防止のための指示をスレーブ側へと与えることなく、単に、前記ワーク検出接点メモリの内容を参照するだけで、干渉防止機能の作動下において、各対応する透過型光電センサのワーク検出接点の動作状態を取得できる、ことを特徴とするPLCのスレーブ。
【請求項2】
前記投受光タイミング制御手段が、
それぞれ投光停止中に対応する第1の論理状態期間と投光中に対応する第2の論理状態期間(α)とを交互に繰り返し、かつ投光中に対応する第2の論理状態期間(α)が信号相互間で重ならないように移相された複数系統の投光制御信号が、前記各投光器の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、前記出力処理部へと対応する出力データを与える投光タイミング制御手段と、
各投光器と対をなす受光器のそれぞれから、各対応する投光器の投光制御信号の第2の論理状態期間(α)内であって、期間(α)の開始から投受光間伝達遅れ相当期間(β)経過後の受光出力信号のみが、各受光器の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御する受光タイミング制御手段とを含む、ことを特徴とする請求項1に記載のPLCのスレーブ。
【請求項3】
前記第2の論理状態期間(α)及び前記投受光間伝達遅れ相当期間(β)は、任意に変更可能なパラメータとして所定のパラメータ格納用メモリに格納されている、ことを特徴とする請求項2に記載のPLCのスレーブ。
【請求項1】
PLCとの間でネットワークを介して入出力データのやり取りを行うための通信処理部と、
複数の透過型光電センサの各投光器の投光制御端子のそれぞれへと接続されるべき複数の出力端子を含む出力端子台と、
複数の透過型光電センサの各受光器の受光出力端子のそれぞれへと接続されるべき複数の入力端子を含む入力端子台と、
与えられた出力データに基づいて出力信号を生成し、これを出力端子台の該当する出力端子から外部へと送出する出力処理部と、
入力端子台を構成する入力端子へと外部から入力される入力信号を取り込んで対応する入力データを生成する入力処理部と、
制御部とを含み、
前記制御部には、
前記PLCからの指示を待つことなく、前記出力処理部への出力データの送出タイミングと前記入力処理部からの入力データ取込タイミングとを制御する投受光タイミング制御手段と、
前記投受光タイミング制御手段の作動下において、前記入力処理部を介して複数の入力端子のそれぞれから取り込まれる入力データを、各対応する透過型光電センサのワーク検出接点の動作状態として記憶するワーク検出接点メモリとが含まれており、
それにより、前記PLCの側では、相互干渉防止のための指示をスレーブ側へと与えることなく、単に、前記ワーク検出接点メモリの内容を参照するだけで、干渉防止機能の作動下において、各対応する透過型光電センサのワーク検出接点の動作状態を取得できる、ことを特徴とするPLCのスレーブ。
【請求項2】
前記投受光タイミング制御手段が、
それぞれ投光停止中に対応する第1の論理状態期間と投光中に対応する第2の論理状態期間(α)とを交互に繰り返し、かつ投光中に対応する第2の論理状態期間(α)が信号相互間で重ならないように移相された複数系統の投光制御信号が、前記各投光器の投光制御端子へと接続されるべき複数の出力端子のそれぞれから出力されるように、前記出力処理部へと対応する出力データを与える投光タイミング制御手段と、
各投光器と対をなす受光器のそれぞれから、各対応する投光器の投光制御信号の第2の論理状態期間(α)内であって、期間(α)の開始から投受光間伝達遅れ相当期間(β)経過後の受光出力信号のみが、各受光器の受光出力端子へと接続されるべき複数の入力端子のそれぞれから取り込まれるように、入力処理部からの入力データ取込を制御する受光タイミング制御手段とを含む、ことを特徴とする請求項1に記載のPLCのスレーブ。
【請求項3】
前記第2の論理状態期間(α)及び前記投受光間伝達遅れ相当期間(β)は、任意に変更可能なパラメータとして所定のパラメータ格納用メモリに格納されている、ことを特徴とする請求項2に記載のPLCのスレーブ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−100043(P2009−100043A)
【公開日】平成21年5月7日(2009.5.7)
【国際特許分類】
【出願番号】特願2007−266935(P2007−266935)
【出願日】平成19年10月12日(2007.10.12)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成21年5月7日(2009.5.7)
【国際特許分類】
【出願日】平成19年10月12日(2007.10.12)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]