
RFIDタグ移動識別方法及びRFIDタグ移動識別プログラム
【課題】一般的なRFIDリーダと一般的なアンテナから得られる読取RFIDタグの電波受信強度、位相やドップラー周波数の時系列データによって、アンテナ前を移動したRFIDタグと静止したままのRFIDタグを識別するRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供する。
【解決手段】RFIDリーダによって移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを取得し、一定のパラメータに基づく静止RFIDタグフィルタによって、読取った複数のRFIDタグの情報から静止RFIDタグを特定する。静止RFIDタグフィルタは、チラ読みフィルタ、RSSI絶対値フィルタ、RSSI非連続上昇フィルタ、RSSI谷型フィルタ、過読フィルタ、位相振れ少フィルタ、垂直方向移動フィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別するRFIDタグ移動識別方法である。
【解決手段】RFIDリーダによって移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを取得し、一定のパラメータに基づく静止RFIDタグフィルタによって、読取った複数のRFIDタグの情報から静止RFIDタグを特定する。静止RFIDタグフィルタは、チラ読みフィルタ、RSSI絶対値フィルタ、RSSI非連続上昇フィルタ、RSSI谷型フィルタ、過読フィルタ、位相振れ少フィルタ、垂直方向移動フィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別するRFIDタグ移動識別方法である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに係り、特に一般的RFIDリーダやアンテナを使用したRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに関する。
【背景技術】
【0002】
最近、UHF帯のRFID(Radio Frequency Identification)技術を用いて、アンテナから10m以上といった遠距離に位置する多数のRFIDタグを一括して瞬時に読取ることが可能となっている。RFIDタグチップの性能向上等により読取可能距離は今後更に伸びることが予想されている。
【0003】
RFIDタグは、倉庫・店舗等での高速入出荷検品や棚卸、盗難検知、商品のレジ精算といった多くの用途に使用が広がりつつある。しかしながら、アンテナ周囲に陳列された商品に貼付されたRFIDタグ等、本来意図した読取対象以外のRFIDタグも読みとってしまう問題があり、実際にアンテナ前を移動したRFIDタグのみを識別する技術が必要とされている。
【0004】
そこで、RFID タグからの受信情報を経時情報に関連付けるとともに、この受信情報を受信した際のスキャンアンテナのスキャン角と経時情報の組を複数個生成するデータ生成手段と、上記データ生成手段の生成したデータを用いて、上記スキャン角と上記経時情報の間の関係を示す線形近似直線を求め、この線形近似直線の傾きから上記RFIDタグが付された移動体の移動方向を検知したり、上記移動体の移動軌跡を求めることにより上記RFIDタグが付された移動体の移動方向を検知し、上記RFIDタグが付された移動体の移動方向を検知する技術が知られている(特許文献1)。
【0005】
また、反射体から、互いに異なる複数の搬送周波数によって送信された反射信号を受信する処理を行う距離測定装置において、上記反射体から送信された上記反射信号を解析することによって、該反射体と当該距離測定装置との距離を算出する距離算出部を備え、反射体と距離測定装置との距離をより精度よく算出する技術が知られている(特許文献2)。
さらに、アンテナをRFIDタグの移動方向に水平ではなく斜めに配置するか出力電波の方向が歪んだ特殊アンテナを使用した技術が知られている(特許文献3)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−303935号公報
【特許文献2】特開2009−80133号公報
【特許文献3】US7817014B2(Fig.17a,Fig.18a〜18b)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の技術は、スキャンアンテナという特殊なアンテナが必要とされる。そしてその構成が複雑であるため、一般的なRFIDリーダと一般的なアンテナを用いた汎用的な装置構成には適用できないという不都合があった。
また特許文献2の技術は、ある1つのタグまでの距離を測定するために2つの異なる周波数にて電波送信を行う特殊なリーダが必要とされる。
さらに特許文献3の技術は、アンテナをRFIDタグの移動方向に水平ではなく斜めに配置するか出力電波の方向が歪んだ特殊アンテナを使用する必要があり、店舗内のゲートといった設置の自由度が少ない場所に適さない場合がある。またRFIDタグからの電波受信強度は人や物がアンテナ前を移動しただけでも変化してしまう場合があるため、その上昇や下降のみにより移動と判定する手法では誤検知が発生することがある。
【0008】
電波出力強度やアンテナのハードウェア調整により読取範囲を狭めて所望のRFIDタグのみを読取る方法が取られることがあるが、遠距離・複数タグ読取のメリットが損なわれてしまう。また、電波のマルチパスフェージングによって予期せず遠くに位置するRFIDタグまで読まれてしまう場合がある。
またアンテナ2枚を離れた場所に設置したり角度をつけて設置したりすることでそれぞれのアンテナでの読取時間差が一定値以上発生した場合に移動と判定する方法が取られることがあるが、アンテナ間に距離や角度を持たせるための設置スペースが必要とされてしまう。また人や物の移動などによる電波の乱反射によって2つのアンテナ間に位置するタグ等が誤って移動と判定されてしまうことがある。
【0009】
このように、遠距離・複数RFIDタグ読取に優れたUHF帯RFIDには、希望していないRFIDタグも読んでしまう「読み過ぎ」の問題がある。出力調整等により読取範囲を狭めてUHF帯のメリットを損ねるのではなく、リーダから取得した膨大な各種無線情報を高速に処理し希望タグ(移動タグ)を識別できるような技術が望まれている。
【0010】
本発明の目的は、機種等に依存せずに、一般的なRFIDリーダと一般的なアンテナから得られる読取RFIDタグの電波受信強度、位相やドップラー周波数の時系列データによって、アンテナ前を移動したRFIDタグと静止したままのRFIDタグを使用アンテナが1枚の場合でも識別することが可能なRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供することにある。
本発明の他の目的は、コンピュータ装置上またはRFIDリーダ上で動作することが可能なRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供することにある。
本発明の更に他の目的は、他のアプリケーションに識別情報を送信するミドルウエアとしてコンピュータ装置上またはRFIDリーダ上で動作することが可能なRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供することにある。
【課題を解決するための手段】
【0011】
前記課題は、本発明のRFIDタグ移動識別方法によれば、複数のRFIDタグと、該複数のRFIDタグからの電波を受信するRFIDリーダを用いて、複数のRFIDタグのうち移動RFIDタグを識別するRFIDタグ移動識別方法において、前記RFIDリーダによって移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを取得し、一定のパラメータに基づく静止RFIDタグフィルタによって、前記読取った複数のRFIDタグの情報から前記静止RFIDタグを特定し、前記複数のRFIDタグから前記移動RFIDタグを識別可能とするもので、前記静止RFIDタグフィルタは、以下の(1)乃至(6)の工程の何れかからなる個別静止RFIDタグフィルタを備え、前記静止RFIDタグフィルタは、複数の前記個別静止RFIDタグフィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別することを特徴とするRFIDタグ移動識別方法;(1).読取中のタグ枚数を変数とした関数を用いて、秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する工程;(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが、谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する工程;(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程;(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する工程、とすることにより解決される。
【0012】
本発明のRFIDタグ移動識別方法では、RFIDタグ、RFIDアンテナとRFIDリーダは、機種等に依存せずに、時系列データを読取り、識別することが可能となる。
また、静止RFIDタグフィルタは、複数の前記個別静止RFIDタグフィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別することにより、複数の観点から静止RFIDタグを識別することが可能となり、高精度な移動RFIDタグの識別が可能となる。
【0013】
特に、一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別するので、人や物、特に金属製のカゴ車や台車等がアンテナ前を移動すること等よる電波の乱反射やマルチパスフェージング、特に水分が含まれた物や人がアンテナ前を移動することによって発生する電波遮蔽によって電波受信強度が上下するような静止したRFIDタグにおいても、静止RFIDタグと識別することができる。
【0014】
このとき、前記(1)における読取中タグ枚数を変数とした関数は、読取中タグ枚数を独立変数とした累乗曲線関数または多項式関数であり、この関数を用い計算した計算値に、所定の割合を乗算した閾値を判断基準として、前記判断基準より秒間読取回数が少ない場合に静止タグと識別可能となる。
【0015】
また、前記各種RFIDタグフィルタを使用しアンテナ近くの水平方向移動のみを検知し遠くの水平方向移動や垂直方向移動は検知しないとすることによって、より高精度な移動識別や移動方向判定が行えるように構成すると好適である。
【0016】
さらに、前記(5)における時系列分析において、位相の標準偏差の値に閾値を設けること、二項検定、カイ二乗検定、G検定の少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程を備えるように構成すると好適である。
【0017】
また、前記一定のパラメータは、予め試験的RFIDタグを移動した後に、移動時の開始点及び終了点を選択することで前記パラメータを自動で計算するように構成すると好適である。このように構成すると、RFIDリーダやアンテナ、タグ、移動速度といった環境の違いを吸収し最適なパラメータが自動計算されるので、パラメータ設定が容易となる。
【0018】
前記課題は、本発明のRFIDタグ移動識別プログラムによれば、コンピュータ装置に、移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを、一定のパラメータに基づく静止RFIDタグフィルタよって、複数の前記RFIDタグの情報から前記静止RFIDタグを特定させ、前記複数のRFIDタグから前記移動RFIDタグを識別させるものであって、静止RFIDタグフィルタとして、(1).読取中のタグ枚数を変数とした関数を用いて求められた秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する手順、(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する手順、(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する手順、(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する手順、のうち少なくとも一つ以上の手順からなる個別静止RFIDタグフィルタを任意の順でコンピュータ装置に実行させる、ことにより解決される。
本発明のRFIDタグ移動識別プログラムによれば、プログラムが稼働する装置であれば、RFIDタグ移動識別させることが可能となる。
【発明の効果】
【0019】
本発明によれば、一般的なRFIDリーダと一般的なアンテナから得られる読取RFIDタグの電波受信強度、位相やドップラー周波数の時系列データによって、アンテナ前を移動したRFIDタグと静止したままのRFIDタグを識別することが可能となる。
人や物、特に金属が含まれたカゴ車や台車等がアンテナ前を移動することによる電波の乱反射やマルチパスフェージング、特に水分が含まれた物や人がアンテナ前を移動することによって発生する電波遮蔽によって電波受信強度が一時的に下落するような静止したRFIDタグにおいても、静止RFIDタグと識別することができる。また複数の静止RFIDタグフィルタを用いることにより、RFIDタグの移動方向を識別でき、高精度な移動識別が可能となる。このように、移動判定の精度を高めることができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係るRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の概略説明図である。
【図2】RFIDタグ移動識別方法の説明図である。
【図3】移動タグ及び静止タグに関する電波受信強度と時間との関係を示すグラフ図である。
【図4】秒間読取可能回数と読取中タグ枚数との関係を示す実測データ及び回帰曲線で表したグラフ図である。
【図5】アンテナの電波放射特性とRFIDタグ位置関係を示す説明図である。
【図6】移動RFIDタグ及び静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図である。
【図7】静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図である。
【図8A】静止RFIDタグと移動RFIDタグの位相と時間との関係を説明するグラフ図である。
【図8B】静止RFIDタグの位相と時間との関係を説明するグラフ図である。
【図8C】静止RFIDタグの位相と時間との関係を説明するグラフ図である。
【図9A】RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成をより具体的にした説明図である。
【図9B】タグ情報取得スレッド(プログラム)と移動タグ識別スレッド(プログラム)のフローチャートである。
【図9C】カイ二乗検定のフローチャートである。
【図10A】判定基データ計算のフローチャートである。
【図10B】移動判定のフローチャートである。
【図11A】水平方向移動タグのRSSI(電波受信強度)、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図である。
【図11B】垂直方向移動タグのRSSI、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図である。
【図12A】移動タグの電波受信強度(上グラフ)と位相(下グラフ)を計測した時系列データを示すグラフ図である。
【図12B】静止タグの電波受信強度(上グラフ)と位相(下グラフ)を計測した時系列データを示すグラフ図である。
【図12C】位相の振れの数値化例を示す図である。
【図13A】移動RFIDタグの水平方向と垂直方向とを説明する説明図である。
【図13B】一般的RFIDアンテナの電波放射パターンの説明図である。
【図13C】水平方向移動と垂直方向移動に関する説明図である。
【図14A】利用データ期間や電波受信強度最大、最小、期間前最大値を説明するグラフ図である。
【図14B】過読フィルタの説明図である。
【図15A】仲上−ライス分布の各種K及びレイリー分布での累積確率分布に関するもので、累積確率と相対的受信電力との関係を示すグラフ図である。
【図15B】レイリーフェージングシュミレーションであり、相対的受信電力と試行回との関係を示すグラフ図である。
【図16A】RFIDタグの移動種別を4種類に分けた概念図である。
【図16B】移動をフィルタするための判断基情報やフィルタ名を示す図表である。
【図16C】アンテナからの距離及び角度とRSSIの高低関係を示す説明図である。
【図16D】垂直移動に関する図13Bと同様な電波放射パターンの説明図である。
【図17A】アンテナに対するRFIDタグの移動と角度の関係の説明図である。
【図17B】RFIDタグの移動に伴う動径成分速度の変化を示すグラフ図である。
【図17C】垂直方向移動時、通常のRFIDアンテナの放射パターンでのRSSI山頂点発生位置に関する説明図である。
【図18】パラメータ設定画面である。
【図19】移動RFIDタグ識別パラメータ設定の説明図である。
【図20】移動RFIDタグ識別パラメータ設定の説明図である。
【図21A】移動RFIDタグ識別パラメータ設定の説明図である。
【図21B】移動RFIDタグ識別パラメータ設定の説明図である。
【図22】パラメータ変更画面である。
【図23】移動RFIDタグ識別パラメータ変更後の画面の説明図である。
【図24】移動RFIDタグ識別パラメータ設定画面の説明図である。
【図25】パラメータ変更画面である。
【図26】アンテナが2つの場合の移動RFIDタグ識別の設定画面の説明図である。
【図27】RFIDタグのEPCにより使用パラメータを分ける場合のフローチャートである。
【図28】パラメータ変更・設定のフローチャートである。
【図29】RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の他の例を示す説明図である。
【図30】倉庫内盗難品検知への応用例を示す説明図である。
【図31】倉庫内棚卸への応用例を示す説明図である。
【発明を実施するための形態】
【0021】
以下、本発明の一実施形態について、図を参照して説明する。なお、以下に説明する部材、配置等は、本発明を限定するものではなく、本発明の趣旨に沿って各種改変することができることは勿論である。また、本明細書及び特許請求の範囲において、RFIDリーダには、RFIDリーダライタを含むものである。
【0022】
図は本発明に係る実施形態であり、図1はRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の概略説明図、図2はRFIDタグ移動識別方法の説明図、図3は移動タグ及び静止タグに関する電波受信強度と時間との関係を示すグラフ図、図4は秒間読取可能回数と読取中タグ枚数との関係を示す実測データ及び回帰曲線で表したグラフ図、図5はアンテナの電波放射特性とRFIDタグ位置関係を示す説明図、図6は移動RFIDタグ及び静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図、図7は静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図、図8Aは静止RFIDタグと移動RFIDタグの位相と時間との関係を説明するグラフ図、図8Bは静止RFIDタグの位相と時間との関係を説明するグラフ図、図8Cは静止RFIDタグの位相と時間との関係を説明するグラフ図、図9AはRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成をより具体的にした説明図、図9Bはタグ情報取得スレッド(プログラム)と移動タグ識別スレッド(プログラム)のフローチャート、図9Cはカイ二乗検定のフローチャート、図10Aは判定基データ計算のフローチャート、図10Bは移動判定のフローチャート、図11AはRSSI、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図、図11BはRSSI、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図、図12Aは 位相の変動についての電波受信強度(上グラフ)と位相(下グラフ)を示すグラフ図、図12Bは位相の変動についての電波受信強度(上グラフ)と位相(下グラフ)を示すグラフ図、図12Cは位相の振れの数値化例を示す図、図13Aは移動RFIDタグの水平方向と垂直方向とを説明する説明図、図13Bは一般的RFIDアンテナの電波放射パターンの説明図、図13Cは水平方向移動と垂直方向移動に関する説明図、図14Aは利用データ期間や電波受信強度最大、最小、期間前最大値を説明するグラフ図、図14Bは過読フィルタの説明図、図15Aは仲上−ライス分布の各種K及びレイリー分布での累積確率分布に関するもので、累積確率と相対的受信電力との関係を示すグラフ図、図15Bレイリーフェージングシュミレーションであり、相対的受信電力と試行回との関係を示すグラフ図、図16AはRFIDタグの移動種別を4種類に分けた概念図、図16Bは移動をフィルタするための判断基情報やフィルタ名を示す図表、図16Cはアンテナからの距離及び角度とRSSIの高低関係を示す説明図、図16Dは垂直移動に関する図13Bと同様な電波分布の説明図、図17Aはアンテナに対するRFIDタグの移動との関係の説明図、図17Bは動径成分速度の変化を示すグラフ図、図17Cは通常のRFIDアンテナの放射パターンのRSSI山頂点に関する説明図、図18はパラメータ設定画面、図19は移動RFIDタグの設定の説明図、図20は移動RFIDタグの設定の説明図、図21Aは移動RFIDタグの設定の説明図、図21Bは移動RFIDタグの設定の説明図、図22はパラメータ変更画面、図23は移動RFIDタグ識別の設定画面の説明図、図24は移動RFIDタグ識別の設定画面の説明図、図25はパラメータ変更画面、図26はアンテナが2つの場合の移動RFIDタグ識別の設定画面の説明図、図27はパラメータ変更のフローチャート、図28はパラメータ変更・設定のフローチャート、図29はRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の他の例を示す説明図、図30は倉庫内盗難品検知への応用例を示す説明図、図31は倉庫内棚卸への応用例を示す説明図である。
【0023】
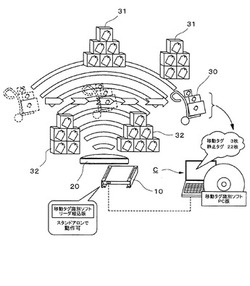
本発明の本質は、RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムであり、機種に依存されない一般的に用いられているRFIDリーダ10と、機種に依存されない一般的に用いられているアンテナ20によって読取られたRFIDタグの電波受信強度や位相及びドップラー周波数の時系列データに基づき、アンテナ20前を移動したRFIDタグと静止したままのRFIDタグを識別するRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムにある。RFIDリーダ10は、その周囲に存在するRFIDタグとの間において無線電波を送受信することによってRFIDタグを探索してRFIDタグの情報(データ)を読み取るものである。
【0024】
本発明に係るRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムは、RFIDリーダ10を制御するコンピュータ装置C、或いはRFIDリーダ10の動作を制御することによって行われる。これを図1及び図2を用いて概念的に説明すると、RFIDリーダ10で読取られた全てのRFIDタグの情報から静止RFIDタグと判断できるものを、静止RFIDタグフィルタFとしての個別静止RFIDタグフィルタで除いていくことにより移動RFIDタグを識別するものである。表1はRFIDタグフィルタ一覧である。
【表1】

【0025】
公知のコンピュータ装置Cとしては、不図示のCPU及びメモリ(ROM,RAM,HDD等)、Wi−Fi(登録商標)、Wi−Fi(登録商標)と接続された出入力アンテナと、電源アダプタ、I/O(出入力)手段、I/O(出入力)手段と接続されたセンサ(光センサ、)、スイッチ等を備えており、メモリに格納されたRFIDタグ移動識別プログラムに基づき、CPUによって、送信出力、もしくはアンテナ20を制御するものである。本実施形態のRFIDリーダ10は、コンピュータ装置Cと接続されている。
【0026】
本実施形態のRFIDリーダ10或いはコンピュータ装置Cは、アンテナ20に対して、人や物品(商品)に付されたRFIDタグが移動した場合に、電波受信強度、位相、ドップラー周波数が時系列で刻々と変化することを検知して、人や物品(商品)に付されたRFIDタグの移動、静止を認識するように制御する。
【0027】
人や物品(商品)には、その個々を識別可能とするための商品コードや個品IDなどが記憶されているRFIDタグが取り付けられている。本発明に係るRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムによって、移動RFIDタグと識別されたものを、上記人や物品(商品)の移動、購買、管理等に利用できる。なお、商品の棚などの場合には、棚の各段に、その棚位置およびその位置範囲を特定するために、棚の所定位置(角部など)にはRFIDタグが取り付けられている。ここで、1つの棚(3次元直方体領域)を構成する所定の部分(例えば角部)には、それぞれRFIDタグが配置されており、このRFIDタグによって当該棚の位置範囲を特定するようにしている。
【0028】
一般に、RFIDリーダ10に備えられたアンテナ20は、静止したRFIDタグ32については、図1で示すように、読取りが常時可能であるが、アンテナ20前を、RFIDタグ30を持った人や、RFIDタグ30が付着した物が通過することにより、図1で示す静止したRFIDタグ31の位置にあるような場合は、通過物の陰に隠れ、ある期間(時間)の間、読取れなくなる場合がある。また静止したRFIDタグ31で示すような場所の場合は、人や物に反射した電波により短い期間だけ読みとれる場合がある(図3を参照)。これらを、後述する静止したRFIDタグと判断する静止RFIDタグフィルタFによって、識別して、静止したRFIDタグを除き、移動しているRFIDタグを特定するものである。
【0029】
このとき、静止RFIDタグフィルタFとして、一定期間中の読取回数に閾値を設ける技術がある。RFIDタグを読み続けることができる場合のRFIDタグ1枚あたり秒間読取可能回数は、RFIDリーダ10の無線通信パラメータにより、例えば読取中RFIDタグ枚数を独立変数とした多項式関数や累乗曲線関数で計算することができる(図4を参照)。この計算値に一定割合をかけた閾値より秒間読取可能回数が少ない場合に、静止したRFIDタグと判定することができる。例えばある時点のRFIDタグ読取枚数が20枚である場合の閾値を図4で示すようにAとして設定できる。
【0030】
また、静止RFIDタグフィルタFとして、RFIDタグからの電波受信強度が距離の4乗に反比例する性質、アンテナ20の電波放射特性、などから移動したRFIDタグの電波受信強度時系列グラフは通常山型となるので、このことを利用する技術がある。例えば、図5に示すようなアンテナ20前を移動したRFIDタグ及び静止したままのRFIDタグでは、グラフに表すと、図6のように、移動タグのみが山型になるものである。山型全体やその登り部分を線形・非線形曲線との適合度判定、強度最大値と最小値の差、時系列で前の点から上昇した点の割合といった各種算術的・統計的手法により判定することで静止したRFIDタグを特定することが可能となる。
【0031】
さらに、静止RFIDタグフィルタFとして、人や物、特に金属が含まれたカゴ車や台車等がアンテナ20前を移動することによる電波の乱反射やマルチパスフェージング、前記した図1で示したような静止したRFIDタグ31のような場所の場合のように、物陰に隠れ電波が遮蔽され受信強度が一時的に下落するときには、静止したRFIDタグにおいても、図7で示すように、例えば時間軸点6以降のような山型のグラフとなることがある。この場合、前の時間軸データまで遡り電波受信強度が高い点があるかを判定すること等により図7のような谷型を検出する技術により、静止したRFIDタグと識別することが可能となる。
【0032】
さらに、RFIDリーダ10の送信搬送波とRFIDタグからの反射で返却された搬送波をRFIDリーダ10内で合成した強度とRFIDタグの電波受信強度を比較するなどの技術により、静止したRFIDタグを特定することが可能である。つまり、2つの搬送波の位相差を0〜180度あるいは0〜360度の範囲で検知することが可能である。この機能は、RFIDリーダ10の機能として備えられている場合があり、これを利用することが可能である。一般に、アンテナ20とRFIDタグとの間の距離が1/4波長または1/2波長変化する毎に位相が1周する。例えば、周波数953MHzの場合で1/4波長は7.86cm、1/2波長は15.72cmである。
【0033】
静止したままのRFIDタグでは位相が変化せず、移動したRFIDタグは変化を続けることになる。前記周波数帯のように波長が人や物の移動距離に比較し小さい場合、人が手を振る等の少しの移動によって位相は大きく変動し、移動時の位相は、図8Aの概念グラフのように連続的に変化し一様に分布することになる。
図8Aで示す2つの時系列データの差異を標準偏差の値に閾値を設けることや二項検定、カイ二乗検定、G検定等の手法により静止したRFIDタグを識別することが可能となる。
【0034】
このとき、標準偏差はデータ数が少ない場合に、変動が大きくなり正しい識別を行えないことがある。二項検定やカイ二乗検定、G検定は、データ数が少ない場合に発生する識別精度の曖昧さを確率として表現できるため、移動時の読取回数が環境により数回〜数100回程度と大きく変動するRFIDタグ読取の場合により有効な方法である。また二項検定、カイ二乗検定、G検定等を用いた技術により、RFIDタグを識別することができる。
【0035】
図9AはRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成をより具体的にした説明図であり、コンピュータ装置(PC)CとRFIDリーダ10とから構成され、これらはLLRP(低レベルのリーダプロトコル)でインターネットやイントラネットで使用されるプロトコル(TCP/IP)を利用して接続されている。これらのコンピュータ装置(PC)CとRFIDリーダ10は汎用のものであり、本発明のために特別形成されたものではない。またRFIDリーダ10は、汎用入出力(GPIO)によってセンサやスイッチ、パトライト(登録商標)等と接続することができる。
【0036】
コンピュータ装置Cには、識別パラメータ設定ツール、識別パラメータ保存ファイル、上位に位置する上位アプリケーション(上位アプリ:RFIDタグデータ表示や保存を行う)、ミドルウエア(ナイスミドル)、RFIDタグ識別エンジン等が、OS上で稼働するように構成されている。図9Aの例では、OSとしてWindowsXP(登録商標)、Windows7(登録商標)を用いた例を示している。
【0037】
図9Bは、タグ情報取得スレッド(プログラム)と移動タグ識別スレッド(プログラム)のフローチャートである。
本実施形態において、タグ情報取得はステップS10〜S15で行われるものであり、コンピュータ装置CとRFIDリーダ10との接続処理(S10)を行い、次に、アンテナ20から電波を送信し、RFIDタグから情報の読取を開始する(ステップS11)。ステップS12〜ステップS15はループとなっており、ステップS12で、読取ったRFIDタグの情報を取得し、読取ったRFIDタグの情報をメモリ(記憶媒体)であるハードディスク等に保存する。またステップS14ではメモリ(記憶媒体)であるRAM等に保持する。このループによりRFIDタグの枚数とそれぞれの読取回数を掛け合わせた数の読取情報が取得される。ここで、RFIDタグ情報は、読取時刻履歴、読取アンテナ履歴、電波受信強度履歴、位相履歴、ドップラー周波数履歴等の情報を取得するものである。
【0038】
これらのRFIDタグ情報は、次の移動タグ識別におけるステップS25の判定基データ計算で利用される。
本実施形態において、移動タグ識別はステップS21〜S32でおこなわれるもので、ステップS22〜S32、ステップS23〜S31、ステップS24〜S29は、それぞれループとなっており、ステップS21で識別パラメータ設定ファイルを読取り各種パラメータをRAM等のメモリに格納する処理を行う。
【0039】
ステップS23では個別RFIDタグの移動判定処理を行う。次に、ステップS24で利用データ期間中の移動判定処理を行う。次にステップS25で判定基データの計算処理を行う。このとき、秒間読取回数、最大電波受信強度、最大−最小電波受信強度、電波受信強度上昇割合、期間中最大 - 期間前最大電波受信強度、位相変動カイ二乗片側確率、ドップラー周波数平均値などが計算される。このときのステップS25の処理は後述する。
【0040】
このようにしてステップS25の処理の後で、ステップS26で移動判定処理を行う。この時のステップS26の処理は後述する。次に、移動RFIDタグが移動かどうかを判断する(ステップS27)。移動RFIDタグの場合(ステップS27:Yes)、移動タグとして処理を行う(ステップS28)。これにより画面表示、上位アプリケーション・サーバへの送信処理等を行う。ステップS28の後で、判定対象タグがまだある場合にはステップS23〜S31のループ処理を継続する。移動RFIDタグでない場合(ステップS27:No)、利用データ期間を0.1秒増やして移動判定処理を行う(ステップS24〜S29)。移動と判定できない場合には利用データ期間上限に到達するまでステップS24〜S29のループを継続する。静止していると判定できる場合には、ステップS30で静止RFIDタグとして処理する。判定対象タグがまだある場合にはステップS23〜S31のループ処理を継続する。以上のようにして、ステップS22からステップS32までを繰り返す。
【0041】
ステップS25の判定基データ計算の詳細フローチャートが図10Aである。計算の際に用いられる各種パラメータ(山頂期間割合、ドップラー周波数取得期間割合、期間前データ取得期間)はステップS21(図9B)において設定ファイルからメモリ内に読みこまれたものである。
【0042】
ステップS70において計算の過程で使用される各種変数を初期化する。数値のカウントや合計を格納する変数は初期値を0とする。RSSIの取り得る値の範囲は−100〜30程度であるため最大値を格納する変数には―999を、最小値を格納する変数には999を初期値として格納しておくことにより、後の比較演算の初回は必ずYesとなり処理を単純化できる。
【0043】
ステップS71でステップS14でメモリ内に保持された履歴データのうち、対象タグ/対象期間のデータN個を計算対象とする。対象期間の全データを走査するためステップS72で変数iにN−1を初期値として格納し、ステップS73〜S84のループ処理でN−1から0までiを1ずつ減算しながら計算を行い、iがマイナスになった時点でループを抜ける。
【0044】
ステップS74において、山頂期間割合パラメータを基にRead_time[i]が山頂期間内のデータであるか判定を行う。山頂期間内のデータであれば(ステップS74:Yes)、RSSI[i]を用い期間中最大電波受信強度更新処理(ステップS75、S76)を行い、山頂期間内のデータでなければ(ステップS74:No)、ステップS77、S78で期間中最小電波受信強度更新処理を行う。
【0045】
ステップS79でRSSI[i]とRSSI[i−1]を比較し、過去の電波受信強度の方が低いか等しい場合(ステップS79:Yes)、ステップS80で電波受信強度上昇カウンタを1増やす。なお、この比較はi=0の場合には行わない。ステップS81において、ドップラー周波数取得期間割合パラメータを基にRead_time[i]がドップラー周波数取得期間内のデータか判定する。判定Yesの場合には、後に平均値を計算するために値を足し算すると共に、カウンタを1増やす(ステップS82)。ステップS83において、ループ終了判定のためにiを1減算するとともにデータカウンタを1増やす。ステップS85において、期間前データ取得期間パラメータ分データを遡りその間の電波受信強度最大値を取得する。ステップS86において各種の移動判定基データが計算される。このうち、位相変動カイ二乗片側確率の計算方法は後述する。
【0046】
ステップS26(図9B)の移動判定の詳細フローチャートが図10Bである。判定基データD1〜D7はステップS25で計算された値であり、識別パラメータP1〜P9はステップS21において設定ファイルからメモリ内に読みこまれたものである。
【0047】
ステップS60はチラ読みフィルタの処理であり、読取中RFIDタグ枚数を独立変数とした関数で計算された秒間読取可能回数とP1との積とD1とを比較する処理である。比較判定がNoの場合には、静止タグと判定され以後の処理は行わない。Yesの場合には次の判定に進む。この分岐は以後の処理で共通である。
【0048】
ステップS61はRSSI絶対値フィルタの処理である。ステップS62及びステップS63はRSSI非連続上昇フィルタの処理である。ステップS64はRSSI谷型フィルタの処理である。ステップS65は位相振れ少フィルタの処理である。ステップS66で垂直方向移動フィルタ使用の有無を判定し、判定Yesの場合には垂直方向移動フィルタの処理であるステップS67を実行する。ステップS67まで全てYESの場合移動タグと判定される。またステップS66の判定がNoの場合にはステップS67を実行せずに移動タグと判定される。
なお、垂直方向移動とは、図13Aに図示されるように、アンテナの電波放射面に垂直な方向、水平方向移動とは電波放射面に水平な方向への移動を意味する。
【0049】
上記した二項検定は一様分布である確率をかなり正確に求めることができるが、データ数が多い場合に計算量が膨大となってしまう欠点がある。カイ二乗検定やG検定は計算量が少なく二項検定を高い精度で近似できるため有用な手法である。しかしいずれの手法とも図8Bのように人等の移動を契機に位相の値が前半・後半で2つのグループに分かれた場合、一様分布と判定され移動タグと誤識別されてしまう場合がある。
【0050】
上記状況のような場合においても、期間中のデータを前半・後半に分けそれぞれで観測頻度を計算することにより、静止タグと識別できるように構成することが可能である。図9Cは、このように、期間中のデータを前半・後半に分けて観測頻度の計算を行う場合を説明するカイ二乗検定のフローチャートであり、図9Cのフローチャートに基づいて説明する。このフローチャートの処理は、それぞれのRFIDタグの利用データ期間毎に行うものである。
【0051】
図9Cのフローチャートは、図9Bにおける移動タグ識別スレッド内の位相変動カイ二乗片側確率を求めるための「判定基データ計算」(ステップS25)の処理に相当する。
この「判定基データ計算」の処理は次のように行われる。
ステップS40において対象タグの対象期間中M個の位相履歴データをメモリから取得する処理を行う。このデータは図9Bにおけるタグ情報取得スレッド(プログラム)処理のステップS14で示す「読取タグ情報メモリ保持」処理によって既に得られたものである。以下、例えば、位相が0〜180°の範囲のデータが、RFIDリーダ10から返却されるケースに基づいて説明をする。位相履歴データが配列Phase_angle[0]〜Phase_angle[M-1],対応する読取時刻履歴データが配列Read_time[0]〜Read_time[M-1]に格納されているものとする。なお以降で角度はラジアンではなく[°]と統一して記述する。Cos,Sinの引数やArctanの戻り値も[°]で計算されるものとする。
【0052】
ステップS41〜S45は、後に位相平均値を求めるための前処理として位相ベクトル和を計算するためのループである。位相は180°の周期データあるためその平均値を算術平均で求めると好ましくない場合がある。例えば静止RFIDタグが風等により微小に振れた場合やRFIDリーダ10内部のノイズ等によって図8Cのように0°(=180°)を挟んだ時系列データとなった場合、その平均値を算術平均で得られる90°としてしまうと変動の大きいデータと見なされ移動RFIDタグと誤認識してしまう場合がある。この場合の平均は0°とした方が望ましい。まず、期間中の前半か後半かで別の平均値とするためにステップS42で期間中の前半かどうか判断する。前半である場合にはステップS43の処理を行い、後半である場合にはステップS44の処理を行う。これらは0〜180°の元データを2倍し0〜360°に変換してその角度をxy平面上に持つ単位ベクトル和を計算する処理である。前半と後半で別の変数を設け、それぞれ以下式で計算する。ステップS43は
Sum_unit_vector_x_anterior
= Sum_unit_vector_x_anterior + Cos(Phase_angle[x]*2)
Sum_unit_vector_y_anterior
= Sum_unit_vector_y_anterior + Sin(Phase_angle[x]*2)
ステップS44は
Sum_unit_vector_x_posterior
= Sum_unit_vector_x_posterior + Cos(Phase_angle[x]*2)
Sum_unit_vector_y_posterior
= Sum_unit_vector_y_posterior + Sin(Phase_angle[x]*2)
である。
【0053】
ステップS46において、先に計算された単位ベクトル和のx,y座標からその角度を以下式で計算することにより期間前半・後半それぞれの位相平均値を求める。
Average_phase_angle_anterior=Atan2(Sum_unit_vector_y_anterior,
Sum_unit_vector_x_anterior)
Average_phase_angle_posterior=Atan2(Sum_unit_vector_y_posterior,
Sum_unit_vector_x_posterior)
ここでAtan2(y,x)は以下を表す関数である。
x>=0の場合 Arctan(y/x)
x<=0の場合 Sign(y)180+Arctan(y/x)
(Sign(y)はyの符号)
【0054】
ステップS47〜S55は後にカイ二乗値を計算するために各位相を、平均値からの差が90°未満であるデータとそれ以外(90〜180°)に分けてそれぞれの観測頻度をカウントするためのループである。ステップS48では、期間中の前半か後半かで平均値について別の値を用いるために、期間中の前半かどうか判断する。前半である場合にはステップS49で変数Average_paに前半位相平均値を格納し、後半である場合にはステップS50で変数Average_paに後半位相平均値を格納する。そして、例えば10°と170°の角度差は160°ではなく最短距離の20°として計算するため、ステップS51で以下式を使用する。
Diff_angle =|Average_pa -
Atan2(Sin(Average_pa)+Sin(Phase_angle[x]*2),
Cos(Average_pa)+Cos(Phase_angle[x]*2))|
【0055】
ステップS51では、角度差が90°より小さいかどうかを判断する。90°より小さい場合(ステップS52:Yes)、ステップS53の処理を行い、90°より大きい場合(ステップS52:No)、ステップS54の処理を行う。これにより、M個の点を2つのグループに分けそれぞれの観測頻度をカウントする(ステップS53、S54)。
【0056】
ステップS47〜S55のループにおいて、もしデータが一様分布であれば、それぞれのグループの発生頻度期待値はM/2となり、ステップS56でその値を計算する処理を行う。
次に、ステップS57で期待値と各観測頻度との差の二乗和を期待値で割ったカイ二乗値(χ2)を以下式で求める。
χ2= ( (Observed[0] − Expected)^2 + (Observed[1] −
Expected)^2 )/Expected
さらに、ステップS58でプログラム起動時にメモリ内配列Chi_probability[]に読みとっていた「自由度1のカイ二乗分布表」からχ2に紐付けられた値を求める。配列Chi_probability[]の添え字は0以上の整数であるためχ2の値も整数に変換する。これが判定基データの「位相変動カイ二乗片側確率」となり、位相時系列データが期間前半にも後半にも偏りのない一様分布である確率を表すことになり、移動RFIDタグの場合は、この値が高くなる。
【0057】
つまり、対象期間中のM個のデータの位相平均値を求める処理を行い、平均からの差により全データをN個のグループに分ける処理を行う。上記の例では角度差により2個に分けているが、それ以外のN個のグループに分けることができる。一様分布のデータであれば全てのグループの頻度の期待値はM/Nである。さらに、各グループの出現頻度からカイ二乗統計量(χ2)を計算する処理を行う。そして、自由度N−1でカイ二乗統計量(χ2)の値が発生する片側確率(P)を求める処理を行う。このとき、プログラム動作時の処理を軽減するために予め計算された代表的な値をメモリに格納しておくことが可能である。そして、この値は、位相データが一様分布である確率とみなすことができる。
【0058】
次に、予め設定された閾値と、求めた片側確率(P)とを比較して、片側確率が閾値より大きいかどうか判定する。片側確率(P)が閾値より小さい場合、静止RFIDタグと判断し、大きい場合、移動RFIDタグと判断する。
【0059】
このようにして、移動か静止かの識別を行うことができる。また、実際には移動していない場合に、移動と判定する誤検知をなくすことが必要な防犯ゲートのような応用では、閾値の値を高めに設定することで誤検知を減らすことができる。
【0060】
ところで、前述した位相を利用した技術だけでは、本来検知したくないアンテナ20から遠く離れた場所や、アンテナ20の横や裏での移動についても検知してしまう可能性が残ってしまう。また電波受信強度を利用した技術だけでは、人や物が長時間電波を遮蔽した後に移動することにより移動誤検知が発生する可能性が残ってしまう。そこで、誤検知の可能性を少なくするために、秒間読取可能回数を利用した技術を含めた、複数の技術によって、個別静止RFIDタグフィルタを構成させて、これらを組み合わせ、或いは全ての技術から構成される個別静止RFIDタグフィルタを用いることにより、RFIDタグの高精度な移動識別が可能となる。
【0061】
図12Bは、図1で示す静止した場所にあるRFIDタグ31のような場合を想定し、実際にRFIDタグ31を配置し、RFIDタグを有しない人がアンテナ20前に長時間立ち電波遮蔽を行った後に離れた際におけるタグ31の電波受信強度(上グラフ)及び位相(下グラフ:0〜180度。)を計測した時系列データを示すグラフ図である。上グラフの直線で囲まれた期間T1において、一定以上の秒間読取回数での電波受信強度山型(山の登り)を検知したが、その期間T1中や期間前後の位相の値は一様に分布していないため、このように位相の値が一様に分布していない場合には、静止したRFIDタグであると識別することが可能である。
【0062】
上記位相の変化の傾きは、アンテナ20に接近している場合と、離れている場合で逆向きとなる。この変曲点発生時と電波受信強度の山頂発生時点を比較することで、RFIDタグがアンテナ20と水平方向に移動したか、垂直方向に移動したかを識別することが可能となる。このため、セキュリティゲート等の応用において重要となるゲート前を通過したRFIDタグだけを検知することが可能となる。
【0063】
図11Aは人がタグの貼付されたシャツを手に持ちアンテナ近くを水平方向に歩行した実際の時系列データであり、上からRSSI、位相、ドップラー周波数のグラフである。x軸の単位は秒であり、左に行くほど過去のデータを示す。RSSIグラフ上の2本の垂直線で囲まれた期間(−2.2〜−1.3秒)のデータで移動と識別した。図の−1.5秒付近においてRSSI山頂点が発生しているがこの近辺で位相の変曲点とドップラー周波数0点が発生している。
【0064】
位相は式(5)で示されるようにタグとリーダアンテナ動径方向距離の関数でありアンテナに近づいている時と離れている時ではその変化の方向が反転し、速度0[m/s]地点でグラフに変曲点が発生する。位相変化の情報を得るためには2点の読取データが必要であるが、その読取点間に7.86cm以上の移動(周波数953MHzで位相0〜180°の場合)が発生した場合にはその変化の方向は2通りあり識別できない。同時読取タグ枚数やタグ応答データ量が多い場合のように読取点間隔が空いてしまうと正しい変化の方向を検知できない場合がある。
【0065】
一方式(6)で表されるドップラー周波数は、1点の読み取りデータで情報を得ることができるため高速に移動した場合でもその符号によって変化の方向を検知できる。式(6)を変形した式(7)によってタグの動径方向移動速度が得られる。
【数1】
【0066】
【数2】
図11A及び図11Bのドップラー周波数グラフ縦軸の単位は[Hz]であるが、値に1.1をかけることでほぼ時速[km/h]に換算できる。
【0067】
図11Bは図11Aと同環境でアンテナ裏面→表面方向に歩行を行ったデータである。位相のグラフの−1.0秒付近において180°近くから0°近くの点に遷移し下向きの線が引かれているが、位相は周期データであるためこの期間の変化の傾きは実際には正である。その後の−0.9秒付近に固まった2点の傾きは負であることから位相変曲点は−0.95秒近辺で発生しておりその付近のドップラー周波数は0に近くなっている。−0.3秒付近においてRSSI山頂点が発生しているがこの近辺で位相の傾きは負、ドップラー周波数はマイナスの値になっている。ドップラー周波数0点からRSSI山頂点発生までには0.65秒程度の時間差が発生したことになる。
【0068】
以上から、RSSI山頂点発生と位相変曲点またはドップラー周波数0点発生の時間差が生じた場合に垂直方向移動と識別可能であることがわかる。なお、図11A、図11Bのドップラー周波数グラフは揺れが発生しているが、これは人の手の振れや上下方向の揺れ等が影響していると考えられる。この影響を考慮し、図9Bで示す判定基データ計算では1点のみの値ではなくある程度の期間中でのドップラー周波数平均値を計算している。
【0069】
図12Aは移動タグの電波受信強度(上グラフ)と位相(下グラフ)を示すグラフ図であり、移動中のRFIDタグの位相は、通常この図のように変動し続ける。また図12Bのように静止した状態のRFIDタグは、この図の下グラフの○部分のように一定の値を取り続ける。アンテナ前に人が長時間とどまったあと、移動したために、人の後ろに隠れていた静止タグに電波受信強度変化が発生(直線で囲まれた部分)し移動タグと誤認識された例であり、この期間の位相の振れは上の本当の移動RFIDタグに比べて低いことがわかる。
【0070】
なお、図12Cは、位相の振れの数値化例を示す図で、この図12Cのように、0〜100の間で数値化される。位相振れ少フィルタの閾値に低い値を設定すると、より多くのRFIDタグが移動RFIDタグと識別される。0と設定することで全てのRFIDタグが移動候補RFIDタグになり(フィルタ無)、100とすることで全てが静止RFIDタグと識別される。デフォルト値は5であるが、識別パラメータ設定ツールにて適宜調整可能である。
【0071】
以上のように、各種静止RFIDタグフィルタFは、その使用の有無、閾値等が、RFIDリーダ10の電波出力や性能、使用アンテナ20、RFIDタグの性能、周囲の静止RFIDタグの想定位置、RFIDタグの枚数等の環境により最適なパラメータが異なることになる。このような最適なパラメータが異なるために、実際の読取環境において、予め、確認のために、RFIDタグを移動し、その挙動やデータの収集等を行い、これらを基に環境の差が吸収された最適なパラメータを求めることが好ましい。
【0072】
本発明の応用用途によってはRFIDタグのアンテナからの距離や移動方向によって移動タグも更にフィルタすることが必要な場合がある。例えば入出荷ゲートが複数存在する倉庫の入出荷検品で本発明が用いられる場合、アンテナが設置されたゲートでのタグ移動のみを検知し隣接する離れたゲートでの移動は検知したくないことがある。また、盗難防止ゲートに本発明が使用される場合にはアンテナ前を水平方向に移動した盗難可能性品のみを検知し店内での買い物客の移動に相当する垂直方向移動は検知したくない場合が多い。図16Aが移動種別を4種類に分けた概念図で、図16Bがそれぞれの移動をフィルタするための判断基情報やフィルタ名である。
【0073】
アンテナ遠くの水平方向移動の場合には、図16C上部の破線矢印のようにアンテナ放射パターン上はRSSIが高い所のみでの移動となり、またアンテナ動径方向の距離減少が小さいことから「RSSI非連続上昇フィルタ」により排除できることが多い。また、フリスの公式から距離が離れた場所でのRSSIは低くなり、レイリー分布や仲上−ライス分布で示されるようにRSSI上振れはほとんど発生しないことから「RSSI絶対値フィルタ」も有効となる。さらに、遠くのタグには十分な電力が供給されにくく読みにくいことから「チラ読みフィルタ」も有用となる場合がある。逆に、アンテナ遠くの移動も検知したい場合にはこれらフィルタの閾値を甘く設定する。
【0074】
図16DのC地点からD地点のようなアンテナ表面→裏面方向の垂直方向移動の場合、距離が1/2になることによりRSSIが+12dBとなるがアンテナ放射パターンから−20dBとなって、合計−8dBとなり「RSSI非連続上昇フィルタ」でフィルタ可能である。
一方、図16DのE地点からF地点のようなアンテナ裏面→表面方向の垂直方向移動の場合では、アンテナ放射パターンよりRSSI上昇は+30dB以上にもなるため「RSSI非連続上昇フィルタ」等でフィルタすることは難しい。そこで垂直方向移動の場合にはRSSI山頂点発生時に動径成分速度が0とならないことを利用しフィルタを行う。以下その方法について説明する。
【0075】
図17AのようにタグがアンテナからA[m]地点を速度v[m/s]で水平方向に移動する場合、アンテナ中心に向かう動径方向(図の点線)成分の速度はv・cosθで与えられ、θ=90°となるx=0[m]地点では0[m/s]になる。図17Bは速度1.11[m/s] (時速4km)で、図17Aのxを−1.5[m]〜1.5[m]の範囲で移動した場合の動径成分速度の変化である。アンテナに向かう方向の速度をプラス、離れる方向の速度をマイナスとした。図17A中の×点(x=0)でアンテナ放射パターン及び直線距離上からRSSIは最大となるがこの点での動径成分速度は0となる。
【0076】
一方、図17Cで示される垂直方向移動の場合、水平方向移動時と同様にx軸上の点で動径成分速度が0[m/s]となるが、アンテナ裏面や側面への電波放射は小さいという通常のRFIDアンテナの放射パターンによってRSSI山頂点はx軸上ではなく通常×点のような場所となる。その時点での動径成分速度は表面→裏面移動の場合はプラス、裏面→表面移動の場合はマイナスとなる。
【0077】
次に、より具体的に説明する。
コンピュータ装置Cは、公知の構成からなるもので、CPU,記憶装置(外部記憶装置を含むもので、HDD,RAM,ROM、CD,DVD,BL,フラッシュメモリ等を含むその他のメモリ等)、ディスプレイ、入力部(キーボード、マウス、タッチパネル)、出力部(電波、音波、光その他の通信手段との間の出力関係を含む)等を備えている。
【0078】
本実施形態では、図1で示すように、RFIDリーダ10と、コンピュータ装置Cは接続されている。そして、アンテナ20で信号を受信し、コンピュータ装置Cは、RFIDリーダ10からの情報を受け取り、RFIDリーダ10を制御するように構成されている。なお、この実施形態では、コンピュータ装置CによってRFIDリーダ10を制御するように構成した例を示しているが、RFIDリーダ10にコンピュータ装置Cと同様な構成を搭載することにより、RFIDリーダ10のみで、制御するように構成することができるのは勿論である。
【0079】
本実施形態におけるRFIDタグ移動識別プログラムは、以下の3つのモジュール(ソフトウェア:プログラム)から構成されている。
1.識別パラメータ設定ツール
2.移動タグ識別エンジン
3.LLRPミドルウエア「ナイスミドル」(商標:以下同じ)
これらのモジュール(ソフトウエア:プログラム)は、OS上で動作するものであり、本実施形態ではWindowsXP(登録商標)或いはWindows7(登録商標)で動作するようになっている。
【0080】
そして、識別パラメータ設定ツールで環境を設定し、次に移動タグ識別エンジンで識別し、LLRPミドルウエア「ナイスミドル」で、移動タグ識別エンジンのフロントエンドとして上位アプリとのインターフェース(I/F)機能を提供する。これにより、それぞれの目的ごとの機能のみを搭載したアプリケーションを開発するようになっている。アプリケーションとしては、例えば、RFIDタグを用いた入出荷検品、在庫管理、入退出管理、盗難品検知、観客管理、商品管理、商品やサービスの販売管理、その他の多くのRFIDタグの移動によって生じる各種管理等を行うアプリケーションを構築することが可能となる。
【0081】
まず読取環境(アンテナ20の構成・使用するRFIDタグ・移動速度・電波出力等)により最適な識別方法やパラメータが異なるため、実環境において最適となるようにパラメータを設定するが、上記の「識別パラメータ設定ツール」を起動する。
この「識別パラメータ設定ツール」により、所定のRFIDタグを移動させた後、その環境における判定パラメータを計算し設定することができる。設定内容は「識別パラメータ保存ファイル」に保存され、「移動タグ識別エンジン」において使用されるようになる。なお、パラメータによっては「識別パラメータ設定ツール」でのみ使用され、「移動タグ識別エンジン」で使用されないものも存在する(リーダIPアドレスや送信出力等、設定画面で青字の項目)。これらは上位アプリからLLRPミドルウエア(ナイスミドル)に設定するように構成される。
【0082】
次に、識別パラメータ設定ツールの使用方法について、画面遷移に基づいて説明する。
まず、PickMovedTagsParamsAutoConfigTool.exeをダブルクリックして識別パラメータ設定ツールを起動する。図18で示す設定画面において、「移動識別パラメータ」タブで接続するRFIDリーダ10の設定を行う。
この設定画面では、上記RFIDリーダ10設定の他に、識別オプション、ログ出力、移動識別パラメータ、識別対象EPC、EPC別の移動識別パラメータ等を設定する。ここで、EPC(Electric Product Code)とは、ICタグを利用して製品識別を行う場合に利用されるコードであり、商品識別コード、輸送用のコンテナなどの識別コード、事業所コード、返却可能な資産の識別コード、企業内の資産管理コードなどが組み込まれているものである。
【0083】
RFIDリーダ設定では、リーダIPアドレス、送信出力(電波出力)、無線チャンネル、アンテナ番号等を特定することができる。
識別オプション(移動識別)では、垂直方向移動フィルタ使用の有無、移動方向表示の有無、アンテナグループを複数設定可能となっており、各グループのアンテナ(本実施形態ではグループA,Bともにアンテナ1〜4)を指定可能となっている。
ログ出力では、移動識別サマリログ、リプレイ用ログ、使用パラメータバックアップが選択可能となっている。
「移動識別パラメータ」では、設定により移動識別対象となるEPCを絞ることが可能である。対象外のEPCではOnMovedTagReportイベントが発生しなくなる。
【0084】
移動識別パラメータでは、利用データ期間、秒間読取回数必要割合(%)、必要RSSI(dBm)、必要RSSI差(dB)、RSSI増加発生必要割合(%)、期間前最大RSSIからの必要増分(dB)、必要位相振れ等の設定が可能となっている。
【0085】
識別対象EPCとEPC別パラメータ設定について説明すると、識別対象EPCは、記入欄が設けられ、この記入欄が空欄の場合には、全EPCが対象となる。記入の場合には、EPC先頭を16進数で記述し、複数指定するときは改行して記入する。また、EPC毎に別の移動識別パラメータを、設定で4つまで設定可能となっている。EPC別の移動識別パラメータは、EPC先頭、必要RSSI(dBm)、必要RSSI差(dB)、期間前最大RSSIからの必要増分(dB)の記入欄が設けられている。
【0086】
識別対象EPC及び使用されるパラメータは、図27で示すフローチャートのようにして決定される。すなわち、ステップS100でタグ読取(EPC=X)を行う。次に、ステップS101で、識別対象EPCが空欄かどうか判断する。空欄である場合(ステップS101:Yes)、ステップS102で、EPC別の識別パラメータで、EPC先頭の何れかを判断する。先頭の何れかである場合(ステップS102:Yes)、ステップS103でEPC別の移動識別パラメータの該当パラメータを使用し移動識別実施処理を行う。そして、ステップS100へ戻り、次の読取タグの処理を同様に行う。空欄でない場合(ステップS101:No)、ステップS104で識別対象EPCの何れかかどうか判断する。識別対象EPCの何れかでない場合(ステップS104:No)、ステップS100へ戻り、次の読取タグの処理を同様に行う。
【0087】
識別対象EPCの何れかである場合(ステップS104:Yes)、ステップS102の判断を行う。ステップS102においてEPC別の識別パラメータで、EPC先頭の何れかを判断するが、先頭の何れかでない場合(ステップS102:No)ステップS105で、移動タグ識別パラメータを使用し移動識別実施処理を行う。そして、ステップS100へ戻り、次の読取タグの処理を同様に行う。
【0088】
前記した図18で示す設定画面で、パラメータを設定した場合には、保存ボタンを押下し、識別パラメータ保存ファイルに保存する。
次に、図19で示す移動タグ識別をする画面では、上下及び二段に分割された画面で、上段側には、移動タグの欄と、静止タグの欄、下段には、RFIDタグからのデータの受信記録の時系列グラフが表示される。また、この画面には、「オープン/クローズ」ボタン、「スタート/ストップ」ボタン、「クリア」ボタン、「リプレイ」ボタンが設けられている。「リプレイ」ボタンは、リプレイ機能を行うもので、パラメータ変更後の動作確認(設定内容確認)を行うことができるものである。
【0089】
そして、「オープン」ボタンを押下後、「スタート」ボタンを押下することで読取が開始され、現在のパラメータで移動と識別されたRFIDタグが「移動タグ」欄に、静止と識別されたものが「静止タグ」欄に表示される。移動タグは利用データ期間の開始・終了点に垂直な棒がグラフ表示される。この実施形態では、画面に表示されるRFIDタグの総数は2048個までとなっているが、これに限るものではない。
【0090】
RFIDタグが移動したにも拘わらず、静止したRFIDタグであると識別された場合、図20で示すように、このRFIDタグ(図20の場合は赤シャツ1)を一覧から選択し、マウスの場合、右クリックで「このタグを”移動”と識別させる」を選択する。このようにすると、図21Aで示すように、該当するRFIDタグのグラフだけが、下部に表示される。そして、移動と識別すべき期間の開始点と終了点を選択する。選択はマウスの場合、左クリックで行う。このとき、図21A、図21Bで示すように、「開始(終了)点を選んで下さい」というメッセージの下部に数値が表示される点を選択することができる。このようにして、安定的に読取が行われている範囲の電波受信強度増加開始点から終了点を選択する。
なお、選択のキャンセルは、グラフの点がないエリアをダブルクリックすることにより行う。
【0091】
上記のように、選択した範囲のデータを「移動」と識別するときには、図22で示すように、パラメータ変更の画面が、表示される。このパラメータ変更画面は、「このタグを“移動”と識別するためには以下青色欄のパラメータを変更下さい」とのメッセージと共に、このRFIDタグの値、“移動”とするための値、青色欄を変更についての欄が表示されており、秒間読取回数必要割合(%)、最大RSSI(dBm)、RSSI差(dB)、RSSI増加発生必要割合(%)、期間前最大RSSIからの必要増分(dB)、利用データ期間、位相振れに対する変更が必要なパラメータが青字で表示される。本実施形態では、「“移動”とするための値」の箇所に変更するための値(本実施形態では期間前最大RSSIからの増分を「12.5以下」)が表示される。そして、青色欄の数値を変更し、「保存」ボタンを押下する。
【0092】
また、パラメータ変更後の動作確認を行うために、図23で示すように、「リプレイ」ボタンを押下し、該当リプレイ用ログを選択することにより、パラメータ変更後の動作確認を行うことが可能となる。本実施形態では、「リプレイ」ボタンの下部には、ログファイル名が表示される。また本実施形態では、長期間(1分以上)のログが保存されているデータのリプレイには対応しない設定になっているが、これに限るものではない。読取時のアンテナ番号とリプレイ時の設定が異なる場合には、一覧で選択したRFIDタグのグラフが選択されないので、設定を合わせて使用することになる。
【0093】
一方、移動と識別されたRFIDタグを“静止”とするには、図24で示すように、該当RFIDタグを右クリックして「このタグを“静止”と識別させる」を選択する。これにより、図25で示すように、「このタグを“静止”と識別するには以下のいずれかのパラメータを変更下さい」とのメッセージと共に、このRFIDタグの値、“静止”とするための値、いずれかを変更の欄で、秒間読取回数必要割合(%)、最大RSSI(dBm)、RSSI差(dB)、RSSI増加発生必要割合(%)、期間前最大RSSIからの必要増分(dB)、利用データ期間、位相振れに対する変更可能なパラメータが青字で表示される。本実施形態では、これらの項目のうち変更する項目である「いずれかを変更」の欄が青色として表示されると共に、“静止”とするための値についてのガイダンスが表示される。
そこで、いずれか1つ以上の数値を「“静止”とするための値」に変更し、「保存」ボタンを押下する。
【0094】
アンテナ20が複数枚設定されている場合は、それぞれのアンテナ20で移動識別が行われる。図26で示す例は、同じRFIDタグがアンテナ20(二つある場合の両方)の前を通過したケースである。なお、移動識別パラメータ画面でアンテナ20設定を変更後は、「クローズ」、次に「オープン」ボタンを押下し、RFIDリーダ10へ再接続を行う。
【0095】
次にログファイルについて説明する。
識別パラメータ設定ツールでは、移動識別サマリログと、リプレイ用ログと、使用パラメータバックアップと、エラーログの4つのログファイルが出力される。移動識別サマリログ、リプレイ用ログと使用パラメータバックアップの出力有無は「移動識別パラメータ」の画面で設定可能となっている。
(1)移動識別サマリログ
「読取状況グラフ表示」の画面で静止や移動と表示されたタイミングでタグ情報が保存される。移動したタグは初めに「静止」と出力された後に「移動」が出力される。
.\LOG ディレクトリ配下にスタートボタンを押下した日付・時刻のファイル名で作成される。
ファイル名例:
SUMMARY_2010_1217_1115_45.csv
出力内容は 「タグ情報表示時PC時刻, 静止・移動種別, EPC, PCBits,
ReaderIp, AntennaId, RSSI,(移動タグの場合は表2の6以降の情報)
出力例:
2010/12/24 19:07:40.108,STATIC,00000000000000000000B302,3000,192.168.55.31,1,-59
2010/12/24 19:07:43.061,MOVED,00000000000000000000B302,3000,192.168.55.31,1,-32,0.8,1293217662.753,1293217663.538,30,1.293,18.0,0.448,16.5,13.80,04
(2)リプレイ用ログ
本実施形態では、リプレイ機能用に全読取データを保存している。長時間読取実施時には出力をOFFとしておくことが好ましい。
ファイル名例:
2010_1217_1115_45.csv
(3)使用パラメータバックアップ
使用した識別パラメータのバックアップ。ツール起動後最初及びパラメータ変更発生後のスタートボタン押下時に作成される。
ファイル名例:
2011_0616_2118_27.xml
(4)エラーログ
リーダとの接続エラーやプログラムエラー等が出力される。
ファイル名: PACT_debug.log
【0096】
次に、移動タグ識別エンジンについて説明する。
前記したように、識別パラメータ設定ツールで設定された方法で移動タグ識別を行う。
本実施形態で用いるミドルウエア(ナイスミドル)は、移動タグ識別エンジンのフロントエンドとして上位アプリとのインターフェース(I/F)機能を提供するものである。上位アプリ開発者が移動タグ識別ソフトのドキュメントとナイスミドルのユーザーマニュアル・ヘルプファイル・サンプルソースを参照して、開発を行う。
【0097】
本実施形態で使用するRFIDリーダライタとしては、例えば、Impinj Speedway : F/W version 3.2.4 (LBT無版)、Impinj Speedway Revolution : F/W version 4.6.1以降 (LBT無)などを用いることができる。
【0098】
本実施形態で動作するOS,上位アプリケーションの開発環境例は、ミドルウエア「ナイスミドル」と同様にWindowsXP(登録商標)やWindows7(登録商標)OSでMicrosoft VisualStudio(登録商標)開発環境である。より具体的な構成ファイルとしては、
PickMovedTagsAgent.dll(移動タグ識別エンジン)
PickMovedTagsAgent.xml(識別パラメータ保存ファイル:編集不可)
PickMovedTagsParamsAutoConfigTool.exe(識別パラメータ設定ツール)
MightyControl.dll(識別パラメータ設定ツール構成ファイル)
EPCtoNAME.csv(識別パラメータ自動設定ツールでこのファイル内のEPCが読まれた場合、「名称 / シリアル」欄に名称を表示。名称,EPCのCSVフォーマットで記述。変更後はツールの再起動が必要。このファイルに含まれないEPCは下位3バイト(EPC欄の右側6文字)を10進数で「名称 / シリアル」欄に表示。)
log4net.dll(識別パラメータ設定ツールでエラーログ出力時に使用されるApache log4netライブラリ)
LICENSE.txt,NOTICE.txt(Apache log4netのLICENSE及びNOTICE)
.\WAVE\notify.wav(識別パラメータ設定ツールで移動タグを識別した場合に鳴る音ファイル。別のWAVEファイルをこのファイルに上書きすることで音を変更することが可能。)
.\Ja-JP\PickMovedTagsParamsAutoConfigTool.resources.dll
MightyControl.resources.dll(識別パラメータ設定ツール用”日本語(日本)”リソースファイル)
.\LOG\(ログファイル格納ディレクトリ)
その他(LLRP.dll, LLRP.Impinj.dll, LLRPNiceMW.dll, SET_READER_CONFIG.xml)はナイスミドルの構成ファイル、
などである。
【0099】
本実施形態の移動識別方法は、基本的に、全読取タグから静止タグを排除し残ったものを移動タグと認識するものである。つまり、図2で示すように、全てのRFIDタグを読み取った全読取タグデータ(移動しているRFIDタグと静止しているRFIDタグの両方)から複数の個別静止RFIDタグフィルタを用いて、静止したRFIDタグを特定し、取り除くものである。例えば、第1の個別静止タグフィルタF(1)によって、移動候補のRFIDタグを絞りこみ、この絞り込んだ移動候補のRFIDタグから、第2の個別静止RFIDタグフィルタF(2)によって、さらに絞りこみ移動候補のRFIDタグを特定する。そして、次なる個別静止RFIDタグフィルタによって、絞りこみ、さらに精度を向上させるためには、第Nの個別静止RFIDタグフィルタF(N)・・・というように複数の個別静止RFIDタグフィルタを用いるもので、最終的に移動しているRFIDタグを移動RFIDタグとして特定するものである。
【0100】
次に識別パラメータ設定ツールについて説明する。
利用データ期間中の最大値は、図14Aで示すように、利用データ期間後半の山頂部から、最小値は前半の山麓部から取得される。
また、期間前最大値取得期間を設定することができ、この期間の値を、大きくすることで、移動判定を厳しくすることが可能となる。つまり、図14Aで示すように、最大値は、期間前最大値から所定の増分となるのが通常である。
【0101】
本実施形態における個別静止タグフィルタの例としては、以下のようなものがある。すなわち、
(1)チラ読みフィルタ(利用データ期間中に秒間読取回数が閾値未満)、
(2)RSSI絶対値フィルタ(最大RSSI(最大電波受信強度)が閾値未満)、
(3)RSSI非連続上昇フィルタ(「最大−最小RSSI(電波受信強度)」が閾値未満)、(RSSI(電波受信強度)(t)>電波受信強度(t−1)である点或いはRSSI(電波受信強度)(t)<電波受信強度(t+1)である点の発生割合が閾値未満)、
(4)RSSI谷型フィルタ(RSSI(谷):期間前最大電波受信強度からの増分が閾値未満)、
(5)過読フィルタ(移動候補判定からX秒後も読取が存在(移動判定まで+X秒必要))、
(6)位相振れ少フィルタ(期間中の位相の変動から計算された検定量が閾値未満)、
である。
【0102】
上記(1)のチラ読みフィルタは、利用データ期間中に秒間読取回数が閾値未満であるが、ここで、秒間読取回数について説明する。
秒間読取可能回数は、例えばあるRFIDタグの無線パラメータ(ISO/IEC18000−6C規格のミラーサブキャリア方式でM=4, Tari=20[usec], BDR=320k)において、RFIDタグの枚数を変化させて、実際に読取を行い、1枚あたりの秒間読取数を計測する。このときのグラフが、図4で示す実線である。これはタグ枚数が10枚以下の場合に点線で示された多項式曲線(y=0.236x2−5.3339x+46.974)、10枚より上の場合に累乗曲線(y=133.34x−0.8605)によって決定係数0.9987、0.9954と高い精度で近似することができる。
他の無線パラメータを使用した場合でも同様に近似関数f(x)を求めることができ、使用中の無線パラメータと読取中タグ枚数により1枚あたり秒間読取可能回数を計算することができる。アンテナを1枚以上のN枚使用する場合にはf(x/N)/Nで計算される数値を秒間読取可能回数として使用できる。この秒間読取可能回数に設定された割合を掛けることにより秒間読取回数閾値とできる。
【0103】
上記(2)のRSSI絶対値フィルタは、最大RSSI(最大電波受信強度)が閾値未満であるが、ここで、電波受信強度について説明する。
電波受信強度は、RFIDリーダ10が受信するRFIDタグからの電波受信強度理論値は次の式(1)で表わされる。
【0104】
【数3】
上式1をdBmで表記すると、
【0105】
【数4】
となる。
【0106】
ここで、アンテナ20からの電波放射パターンは通常、図13Bのようになり、図13BのA地点とアンテナ20前のB地点を比較すると、直線距離が1/2であるため電波受信強度は+12dBとなる。この図13Bのように、A地点からB地点までタグが移動すると電波受信強度はlog Greaderの係数が20であることから20dB高くなる。上述の距離による値を加えると32dBの大きな差が連続的に傾向を持って発生することになる。
【0107】
一方、アンテナ20−タグ間には直接波以外にも床や天井、什器等での反射波・回折波が存在しそれらが全て干渉しあってマルチパスフェージングが発生する。マルチパスフェージングは仲上−ライス分布(直接波の強度が反射波や回折波に比べ強い場合)やレイリー分布(直接波の強度が弱い場合)でモデル化できることが知られており、それぞれの確率密度関数は以下の式(3)(4)で与えられる。
【0108】
仲上−ライス分布:
【数5】
ここでK=a2/2σ2は直接波平均電力(a2/2)と散乱波平均電力(σ2)の比を与える。rは信号振幅である。
【0109】
レイリー分布:
【数6】
仲上−ライス分布の各種K及びレイリー分布での累積確率分布は、前記した図15Aのようになる。
【0110】
アンテナ20前を移動するRFIDタグは、直接波が支配的となるため仲上−ライス分布(K=10やK=40)となり、この場合の電波受信強度の変動は先述の距離やアンテナ放射パターンにより発生するものに比べかなり小さいものとなることがわかる。また、アンテナ前を人や物が通過することにより静止タグにフェージングが発生した場合の受信強度変化をレイリー分布でシミュレーションしたグラフが、図15Bであり、受信強度の大きな差は発生することがあるがその変化が連続的に傾向を持って発生することは非常に稀であることがわかる。
【0111】
これらのことからマルチパスフェージングを考慮しても前述手法(山型全体やその登り部分を線形・非線形曲線との適合度判定や強度最大値と最小値の差、時系列で前の点から上昇した点の割合といった各種算術的・統計的手法)が移動タグ識別手法として有効であることがわかる。
【0112】
上記(3)のRSSI非連続上昇フィルタは、「最大−最小RSSI(電波受信強度)」が閾値未満、RSSI(電波受信強度)(t)>電波受信強度(t−1)である点或いはRSSI(電波受信強度)(t)<電波受信強度(t+1)である点の発生割合が閾値未満である。
【0113】
上記(4)のRSSI谷型フィルタは、期間前最大RSSI(電波受信強度)からの増分が閾値未満である。
【0114】
上記(5)の過読フィルタは、移動候補判定からX秒後も読取が存在(移動判定まで+X秒必要)である。図14Bはこれを説明するグラフ図である。
【0115】
上記(6)の位相振れ少フィルタは、期間中の位相の変動から計算された検定量が閾値未満であるが、ここで、位相について説明する。
位相は次の式(5)で表すことができる。
【0116】
【数7】
このうち次の3つの項はある移動判定期間中一定とみなすことができる。
θT: リーダからの電波送信時に変化する位相
θR: リーダでタグ応答波受信時に変化する位相
θTAG:タグ応答時内部で変化する位相
波長(λ)は使用周波数により定まるので、位相θはリーダ−タグ間距離(r)のみを変数とした関数となり、2π(360度)で剰余を取ることで周期関数となる。
【0117】
ミドルウエアを用いた例について、より具体的に説明すると、移動するRFIDタグの情報を受け取るには、IsPickMovedTag及びSyncLocalTimeをtrueとしMovedTagReportHandlerを設定する。また、SessionOnプロパティの設定を行わないようにする。
静止・移動の区別無く読まれたRFIDタグの全てを受け取るには、ミドルウエア(ナイスミドル)のTagReportHandlerデリゲートも設定する。
本実施形態のデリケートとしては、MovedTagReportHandler(MovedTagData)であり、LLRPAgentのOnMovedTagReportイベントを処理するメソッドを表す。
LLRPAgentクラスとしては、イベントがOnMovedTagReportという名前の場合、デリケートはMovedTagReportHandlerであり、移動したタグ情報がMovedTagData型で渡される。
パブリックプロパティとしては、IsPickMovedTagとSyncLocalTimeがあり、ミドルウエア(ナイスミドル)から移動タグ情報を取得する場合trueに設定する。
【0118】
パブリックプロパティについて、移動するRFIDタグ情報(MovedTagData)とミドルウエア(ナイスミドル)でのRFIDタグ情報(TagData)との相違を踏まえて記述する。
【表2】
【0119】
次に、サンプルソースについて記述すると、ミドルウエアのソースコードに以下太字の行を追加する。
using mightycard.rfid.llrpmw;
try{
.
.
llrpAgent.OnErrorReport
+=new ErrorReportHandler(llrpAgent_OnErrorReport);
//→移動タグ識別エンジンを使用するための設定
llrpAgent.IsPickMovedTag = true;
llrpAgent.SyncLocalTime = true;
llrpAgent.OnMovedTagReport += new MovedTagReportHandler(llrpAgent_OnMovedTagReport);
//←移動タグ識別エンジンを使用するための設定
.
.
}catch(Exception
e)
MessageBox.Show(e.Message)
}
//OnMovedTagReportイベントの処理関数
void llrpAgent_OnMovedTagReport(MovedTagData tagData)
{
MessageBox.Show(“このタグは移動しました : ” + tagData.Epc)
………………..
}
【0120】
この他に図29のようにRFIDリーダ内のLinux OS(商標)上で「移動タグ識別エンジン」を動作させ、一方、「識別パラメータ設定ツール」については、コンピュータ装置Cで動作するような形態もある。この場合LLRPミドルウエアを使用しないことになり、移動タグ識別エンジンが直接RFIDリーダのSDKからRFIDタグの情報を取得することになる。
このようにRFIDリーダ内のLinux OS(商標)上で「移動タグ識別エンジン」を動作させることができる。
次に、識別パラメータ設定ツールでのパラメータ調整手順について、図28のフローチャートに基づいて説明する。
【0121】
まずステップS109で静止RFIDタグをRFIDタグリーダの周囲に配置する。このとき実際の環境で想定される位置にRFIDタグを配置する。例えば売り場の盗難防止ゲートとしてアンテナが設置される場合、アンテナの一番近くの棚にRFIDタグ付き商品が置かれた環境で設定ツールを使用する。
次にステップS110で、不図示の操作手段により、識別パラメータ設定ツールを起動する処理を行う。次に、ステップS120で、コンピュータ装置C等の記憶装置に格納されている識別パラメータ保存ファイルを読取り、移動タグ識別エンジン(及びミドルウエア「ナイスミドル」)を使用してRFIDタグの読取りを開始する処理を行う。
ステップS130では、周囲に静止タグを配置した環境で移動と認識させたい方法で、RFIDタグを移動させる。
【0122】
ここで、「周囲に静止タグを配置した環境」とは、 実際の環境で想定される位置にRFIDタグを配置することを意味する。例えば、上述のように、売り場の盗難ゲートとしてアンテナ20が設置される場合には、アンテナ20近くの棚にRFIDタグ付き商品が置かれた環境で設定ツールを使用する。
また、「移動と識別させたい場合」とは、RFIDタグが貼付された読取対象物を実際の移動方法(フォークリフト運転や人の歩行)でアンテナ20前を移動させる。その際に読取条件を通常より厳しい方法(アンテナ20に近い場所を高速移動、アンテナ20から遠い場所を低速移動、RFIDタグにフォークの爪があたり隠れる、鞄の中に多数のRFIDタグを隠す等)で移動させ、このような状態においてパラメータを合わせることで通常の移動の場合に余裕をもって移動と識別できるパラメータになる。
【0123】
このとき、ステップS140で、静止したRFIDタグを移動しているRFIDタグと誤検知あるかどうか判別する。誤検知があると判断された場合(ステップS140:Yes)、ステップS150において、画面上で誤認識RFIDタグを選択し、パラメータの変更を行う。そして、ステップS160で、リプレイ機能を起動し、誤検知したものが解消されているかどうかを確認する。そして、ステップS130の処理へ戻る。
【0124】
一方、ステップS140で誤検知がないと判断された場合(ステップS140:No)、ステップS170で、移動RFIDタグを静止RFIDタグと誤検知あるかどうか判断する。ステップS170で誤検知があると判断された場合(ステップS170:Yes)、ステップS180で、画面上で誤認識したRFIDタグを選択し、グラフ上から移動と識別されるべき期間を選択する。そしてステップS190でツールで計算された範囲の値にパラメータを変更する処理を行う。この処理の後で、ステップS210で、リプレイ機能を起動し、誤検知したものが解消されているかどうかを確認する。そして、ステップS130の処理へ戻る。
【0125】
また、ステップS170で、誤検知がないと判断された場合(ステップS170:No)、ステップS200で識別パラメータ決定し、設定ファイルに保存する処理を行う。
【0126】
次に、本発明の応用例として倉庫や店舗での入出荷検品、店舗での盗難防止ゲート、倉庫内盗難品検知、倉庫内棚卸について説明する。それぞれの用途の目的や読取環境によって使用するフィルタやそのパラメータ設定が異なってくる。他の応用用途としては空港や工場等でコンベア上を移動するタグ付き荷物や物品の識別が上げられる。電波受信強度変化に加え位相やドップラー情報を使用することによって1枚のアンテナでも複数コンベアの読み分けや移動方向、速度の検知を行うことができる。
【0127】
まず、倉庫や店舗での入出荷検品への応用例について説明する。図1のようにアンテナ前をタグが貼付された読取対象物(洋服やバックといったアパレル製品やテレビ・携帯電話等の電気製品や部品等)を台車やフォークリフト等で通過させることで高速に大量の検品を行うことができる。この用途の特徴としてはタグが重なる等によって読みにくい(RSSIが低いままの)状況が発生し得ること、アンテナのすぐ近くに対象外タグを置かないといった環境コントロールが比較的容易であることがあげられる。
【0128】
こういった環境では例えばRSSI絶対値フィルタを使用せず、またRSSI非連続上昇フィルタのパラメータを甘くすることで読みにくいタグも移動と検知させながら、チラ読みフィルタや位相振れ少フィルタによって遠くの静止タグを排除することが可能である。
【0129】
次に、店舗での盗難防止ゲートへの応用例について説明する。図13Cのようにレジで会計が済んでいないタグ付き商品がRFIDアンテナ及びリーダが組込まれたゲート前を移動したことを検知しブザーを鳴らすことが可能となる。従来の磁界方式のゲートではゲート間距離が1mを超えると検知が難しくなるが、電磁界方式のUHF帯RFIDを使用することにより2m以上といったゲート幅でも検知可能となる。また、長距離通信の特性を活かしアンテナを天井や床下に配置することも可能である。
この応用では、ゲート周りのタグを読んでしまい、盗難を行っていない人が通過したときにブザーを鳴らしてしまうとお客の感情を害し、お店の評価を落としてしまう危険性がある。そのため全ての移動タグを検知できなくても可とし、各種移動フィルタの閾値を高めに設定することができる。図13C(A)のような水平方向移動は検知しながら(B)のような垂直方向移動はブザーを鳴らさないようにするために、まず識別パラメータ設定ツールで垂直方向に移動した場合のデータを取得し、それが静止と識別できるよう[移動識別パラメータ]欄の調整を行う。
多くの場合フィルタを厳しめに設定することで水平方向は移動と識別しながら垂直方向を静止と識別することができる。しかし、特にアンテナ近くの裏面から表面への移動時、垂直方向も識別されてしまう場合は、[識別オプション]の「垂直方向移動フィルタ」を利用すること(チェックをON)により解決することが可能である。
【0130】
さらに、倉庫内盗難品検知への応用例について説明する。図30で示すようにRFIDアンテナ20を出入口付近の天井等に設置することによって、倉庫内のタグつき物品の移動が発生した場合に検知を行うことができる。
【0131】
図30は倉庫4階で、“緑花瓶”の盗難が発生したことを地下の中央監視室で検知した例である。カメラや赤外線センサで監視する方法と違い、暗闇の中でも検知できたり、鞄の中などに隠された場合でもどの物品が盗まれたのかわかったりするのが大きな特徴である。位相は人の移動だけでも振れることがあり静止タグを移動と誤検知してしまう可能性があるが、通常人の出入りが発生することのない夜間等の監視時には位相振れ少フィルタのみを使用することによりRSSI非連続上昇フィルタ等使用時よりも広範囲の進入検知が可能となる。進入検知後にRSSI非連続上昇フィルタ等で物品の特定を行うことができる。
【0132】
次に、倉庫内棚卸への応用例について説明する。図31で示すように、倉庫200は既存のものであり、物品(商品)の高さ等に応じた棚が設けられている。この棚にはRFIDタグからなるロケーションタグ201が付されており、ロケーションタグ201が示す位置情報が得られることになる。一方、棚に格納される物品(商品)にも、その性質や数量等を含めて商品情報が記憶されたRFIDタグからなる商品タグ202が付されている。アンテナ20とRFIDリーダ10が格納されている制御装置(コンピュータ装置C)を備えた自動読取装置をフォークリフト210で移動させることにより、静止したアンテナ前をタグが移動したのと同じ状態となる。
【0133】
フォークリフト移動中にアンテナ前にあるタグのRSSIのみが大きな山型になることを利用しRSSI非連続上昇フィルタのパラメータを適切に設定することによって丁度アンテナ前に位置するロケーションタグ及び商品タグのみを検知することができる。これにより、どの位置にどの商品があるという棚卸を安全・高速に行うことができる。無線回線を通して、読取った商品情報、位置情報、紐付けた商品情報(有無含む)と位置情報をリアルタイム転送する。長距離読取に優れたUHF帯RFIDを使用することによって同種の装置でバーコード技術を使う場合に比べタグの貼付位置を自由に配置できる。また、箱の内側の非可視位置に貼付することも可能となる。
【符号の説明】
【0134】
10 RFIDリーダ
20 アンテナ
30 RFIDタグ
F 静止RFIDタグフィルタ
C コンピュータ装置
【技術分野】
【0001】
本発明は、RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに係り、特に一般的RFIDリーダやアンテナを使用したRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに関する。
【背景技術】
【0002】
最近、UHF帯のRFID(Radio Frequency Identification)技術を用いて、アンテナから10m以上といった遠距離に位置する多数のRFIDタグを一括して瞬時に読取ることが可能となっている。RFIDタグチップの性能向上等により読取可能距離は今後更に伸びることが予想されている。
【0003】
RFIDタグは、倉庫・店舗等での高速入出荷検品や棚卸、盗難検知、商品のレジ精算といった多くの用途に使用が広がりつつある。しかしながら、アンテナ周囲に陳列された商品に貼付されたRFIDタグ等、本来意図した読取対象以外のRFIDタグも読みとってしまう問題があり、実際にアンテナ前を移動したRFIDタグのみを識別する技術が必要とされている。
【0004】
そこで、RFID タグからの受信情報を経時情報に関連付けるとともに、この受信情報を受信した際のスキャンアンテナのスキャン角と経時情報の組を複数個生成するデータ生成手段と、上記データ生成手段の生成したデータを用いて、上記スキャン角と上記経時情報の間の関係を示す線形近似直線を求め、この線形近似直線の傾きから上記RFIDタグが付された移動体の移動方向を検知したり、上記移動体の移動軌跡を求めることにより上記RFIDタグが付された移動体の移動方向を検知し、上記RFIDタグが付された移動体の移動方向を検知する技術が知られている(特許文献1)。
【0005】
また、反射体から、互いに異なる複数の搬送周波数によって送信された反射信号を受信する処理を行う距離測定装置において、上記反射体から送信された上記反射信号を解析することによって、該反射体と当該距離測定装置との距離を算出する距離算出部を備え、反射体と距離測定装置との距離をより精度よく算出する技術が知られている(特許文献2)。
さらに、アンテナをRFIDタグの移動方向に水平ではなく斜めに配置するか出力電波の方向が歪んだ特殊アンテナを使用した技術が知られている(特許文献3)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−303935号公報
【特許文献2】特開2009−80133号公報
【特許文献3】US7817014B2(Fig.17a,Fig.18a〜18b)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の技術は、スキャンアンテナという特殊なアンテナが必要とされる。そしてその構成が複雑であるため、一般的なRFIDリーダと一般的なアンテナを用いた汎用的な装置構成には適用できないという不都合があった。
また特許文献2の技術は、ある1つのタグまでの距離を測定するために2つの異なる周波数にて電波送信を行う特殊なリーダが必要とされる。
さらに特許文献3の技術は、アンテナをRFIDタグの移動方向に水平ではなく斜めに配置するか出力電波の方向が歪んだ特殊アンテナを使用する必要があり、店舗内のゲートといった設置の自由度が少ない場所に適さない場合がある。またRFIDタグからの電波受信強度は人や物がアンテナ前を移動しただけでも変化してしまう場合があるため、その上昇や下降のみにより移動と判定する手法では誤検知が発生することがある。
【0008】
電波出力強度やアンテナのハードウェア調整により読取範囲を狭めて所望のRFIDタグのみを読取る方法が取られることがあるが、遠距離・複数タグ読取のメリットが損なわれてしまう。また、電波のマルチパスフェージングによって予期せず遠くに位置するRFIDタグまで読まれてしまう場合がある。
またアンテナ2枚を離れた場所に設置したり角度をつけて設置したりすることでそれぞれのアンテナでの読取時間差が一定値以上発生した場合に移動と判定する方法が取られることがあるが、アンテナ間に距離や角度を持たせるための設置スペースが必要とされてしまう。また人や物の移動などによる電波の乱反射によって2つのアンテナ間に位置するタグ等が誤って移動と判定されてしまうことがある。
【0009】
このように、遠距離・複数RFIDタグ読取に優れたUHF帯RFIDには、希望していないRFIDタグも読んでしまう「読み過ぎ」の問題がある。出力調整等により読取範囲を狭めてUHF帯のメリットを損ねるのではなく、リーダから取得した膨大な各種無線情報を高速に処理し希望タグ(移動タグ)を識別できるような技術が望まれている。
【0010】
本発明の目的は、機種等に依存せずに、一般的なRFIDリーダと一般的なアンテナから得られる読取RFIDタグの電波受信強度、位相やドップラー周波数の時系列データによって、アンテナ前を移動したRFIDタグと静止したままのRFIDタグを使用アンテナが1枚の場合でも識別することが可能なRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供することにある。
本発明の他の目的は、コンピュータ装置上またはRFIDリーダ上で動作することが可能なRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供することにある。
本発明の更に他の目的は、他のアプリケーションに識別情報を送信するミドルウエアとしてコンピュータ装置上またはRFIDリーダ上で動作することが可能なRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムを提供することにある。
【課題を解決するための手段】
【0011】
前記課題は、本発明のRFIDタグ移動識別方法によれば、複数のRFIDタグと、該複数のRFIDタグからの電波を受信するRFIDリーダを用いて、複数のRFIDタグのうち移動RFIDタグを識別するRFIDタグ移動識別方法において、前記RFIDリーダによって移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを取得し、一定のパラメータに基づく静止RFIDタグフィルタによって、前記読取った複数のRFIDタグの情報から前記静止RFIDタグを特定し、前記複数のRFIDタグから前記移動RFIDタグを識別可能とするもので、前記静止RFIDタグフィルタは、以下の(1)乃至(6)の工程の何れかからなる個別静止RFIDタグフィルタを備え、前記静止RFIDタグフィルタは、複数の前記個別静止RFIDタグフィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別することを特徴とするRFIDタグ移動識別方法;(1).読取中のタグ枚数を変数とした関数を用いて、秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する工程;(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが、谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する工程;(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程;(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する工程、とすることにより解決される。
【0012】
本発明のRFIDタグ移動識別方法では、RFIDタグ、RFIDアンテナとRFIDリーダは、機種等に依存せずに、時系列データを読取り、識別することが可能となる。
また、静止RFIDタグフィルタは、複数の前記個別静止RFIDタグフィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別することにより、複数の観点から静止RFIDタグを識別することが可能となり、高精度な移動RFIDタグの識別が可能となる。
【0013】
特に、一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別するので、人や物、特に金属製のカゴ車や台車等がアンテナ前を移動すること等よる電波の乱反射やマルチパスフェージング、特に水分が含まれた物や人がアンテナ前を移動することによって発生する電波遮蔽によって電波受信強度が上下するような静止したRFIDタグにおいても、静止RFIDタグと識別することができる。
【0014】
このとき、前記(1)における読取中タグ枚数を変数とした関数は、読取中タグ枚数を独立変数とした累乗曲線関数または多項式関数であり、この関数を用い計算した計算値に、所定の割合を乗算した閾値を判断基準として、前記判断基準より秒間読取回数が少ない場合に静止タグと識別可能となる。
【0015】
また、前記各種RFIDタグフィルタを使用しアンテナ近くの水平方向移動のみを検知し遠くの水平方向移動や垂直方向移動は検知しないとすることによって、より高精度な移動識別や移動方向判定が行えるように構成すると好適である。
【0016】
さらに、前記(5)における時系列分析において、位相の標準偏差の値に閾値を設けること、二項検定、カイ二乗検定、G検定の少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程を備えるように構成すると好適である。
【0017】
また、前記一定のパラメータは、予め試験的RFIDタグを移動した後に、移動時の開始点及び終了点を選択することで前記パラメータを自動で計算するように構成すると好適である。このように構成すると、RFIDリーダやアンテナ、タグ、移動速度といった環境の違いを吸収し最適なパラメータが自動計算されるので、パラメータ設定が容易となる。
【0018】
前記課題は、本発明のRFIDタグ移動識別プログラムによれば、コンピュータ装置に、移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを、一定のパラメータに基づく静止RFIDタグフィルタよって、複数の前記RFIDタグの情報から前記静止RFIDタグを特定させ、前記複数のRFIDタグから前記移動RFIDタグを識別させるものであって、静止RFIDタグフィルタとして、(1).読取中のタグ枚数を変数とした関数を用いて求められた秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する手順、(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する手順、(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する手順、(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する手順、のうち少なくとも一つ以上の手順からなる個別静止RFIDタグフィルタを任意の順でコンピュータ装置に実行させる、ことにより解決される。
本発明のRFIDタグ移動識別プログラムによれば、プログラムが稼働する装置であれば、RFIDタグ移動識別させることが可能となる。
【発明の効果】
【0019】
本発明によれば、一般的なRFIDリーダと一般的なアンテナから得られる読取RFIDタグの電波受信強度、位相やドップラー周波数の時系列データによって、アンテナ前を移動したRFIDタグと静止したままのRFIDタグを識別することが可能となる。
人や物、特に金属が含まれたカゴ車や台車等がアンテナ前を移動することによる電波の乱反射やマルチパスフェージング、特に水分が含まれた物や人がアンテナ前を移動することによって発生する電波遮蔽によって電波受信強度が一時的に下落するような静止したRFIDタグにおいても、静止RFIDタグと識別することができる。また複数の静止RFIDタグフィルタを用いることにより、RFIDタグの移動方向を識別でき、高精度な移動識別が可能となる。このように、移動判定の精度を高めることができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係るRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の概略説明図である。
【図2】RFIDタグ移動識別方法の説明図である。
【図3】移動タグ及び静止タグに関する電波受信強度と時間との関係を示すグラフ図である。
【図4】秒間読取可能回数と読取中タグ枚数との関係を示す実測データ及び回帰曲線で表したグラフ図である。
【図5】アンテナの電波放射特性とRFIDタグ位置関係を示す説明図である。
【図6】移動RFIDタグ及び静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図である。
【図7】静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図である。
【図8A】静止RFIDタグと移動RFIDタグの位相と時間との関係を説明するグラフ図である。
【図8B】静止RFIDタグの位相と時間との関係を説明するグラフ図である。
【図8C】静止RFIDタグの位相と時間との関係を説明するグラフ図である。
【図9A】RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成をより具体的にした説明図である。
【図9B】タグ情報取得スレッド(プログラム)と移動タグ識別スレッド(プログラム)のフローチャートである。
【図9C】カイ二乗検定のフローチャートである。
【図10A】判定基データ計算のフローチャートである。
【図10B】移動判定のフローチャートである。
【図11A】水平方向移動タグのRSSI(電波受信強度)、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図である。
【図11B】垂直方向移動タグのRSSI、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図である。
【図12A】移動タグの電波受信強度(上グラフ)と位相(下グラフ)を計測した時系列データを示すグラフ図である。
【図12B】静止タグの電波受信強度(上グラフ)と位相(下グラフ)を計測した時系列データを示すグラフ図である。
【図12C】位相の振れの数値化例を示す図である。
【図13A】移動RFIDタグの水平方向と垂直方向とを説明する説明図である。
【図13B】一般的RFIDアンテナの電波放射パターンの説明図である。
【図13C】水平方向移動と垂直方向移動に関する説明図である。
【図14A】利用データ期間や電波受信強度最大、最小、期間前最大値を説明するグラフ図である。
【図14B】過読フィルタの説明図である。
【図15A】仲上−ライス分布の各種K及びレイリー分布での累積確率分布に関するもので、累積確率と相対的受信電力との関係を示すグラフ図である。
【図15B】レイリーフェージングシュミレーションであり、相対的受信電力と試行回との関係を示すグラフ図である。
【図16A】RFIDタグの移動種別を4種類に分けた概念図である。
【図16B】移動をフィルタするための判断基情報やフィルタ名を示す図表である。
【図16C】アンテナからの距離及び角度とRSSIの高低関係を示す説明図である。
【図16D】垂直移動に関する図13Bと同様な電波放射パターンの説明図である。
【図17A】アンテナに対するRFIDタグの移動と角度の関係の説明図である。
【図17B】RFIDタグの移動に伴う動径成分速度の変化を示すグラフ図である。
【図17C】垂直方向移動時、通常のRFIDアンテナの放射パターンでのRSSI山頂点発生位置に関する説明図である。
【図18】パラメータ設定画面である。
【図19】移動RFIDタグ識別パラメータ設定の説明図である。
【図20】移動RFIDタグ識別パラメータ設定の説明図である。
【図21A】移動RFIDタグ識別パラメータ設定の説明図である。
【図21B】移動RFIDタグ識別パラメータ設定の説明図である。
【図22】パラメータ変更画面である。
【図23】移動RFIDタグ識別パラメータ変更後の画面の説明図である。
【図24】移動RFIDタグ識別パラメータ設定画面の説明図である。
【図25】パラメータ変更画面である。
【図26】アンテナが2つの場合の移動RFIDタグ識別の設定画面の説明図である。
【図27】RFIDタグのEPCにより使用パラメータを分ける場合のフローチャートである。
【図28】パラメータ変更・設定のフローチャートである。
【図29】RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の他の例を示す説明図である。
【図30】倉庫内盗難品検知への応用例を示す説明図である。
【図31】倉庫内棚卸への応用例を示す説明図である。
【発明を実施するための形態】
【0021】
以下、本発明の一実施形態について、図を参照して説明する。なお、以下に説明する部材、配置等は、本発明を限定するものではなく、本発明の趣旨に沿って各種改変することができることは勿論である。また、本明細書及び特許請求の範囲において、RFIDリーダには、RFIDリーダライタを含むものである。
【0022】
図は本発明に係る実施形態であり、図1はRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の概略説明図、図2はRFIDタグ移動識別方法の説明図、図3は移動タグ及び静止タグに関する電波受信強度と時間との関係を示すグラフ図、図4は秒間読取可能回数と読取中タグ枚数との関係を示す実測データ及び回帰曲線で表したグラフ図、図5はアンテナの電波放射特性とRFIDタグ位置関係を示す説明図、図6は移動RFIDタグ及び静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図、図7は静止RFIDタグに関する電波受信強度と時間との関係を説明するグラフ図、図8Aは静止RFIDタグと移動RFIDタグの位相と時間との関係を説明するグラフ図、図8Bは静止RFIDタグの位相と時間との関係を説明するグラフ図、図8Cは静止RFIDタグの位相と時間との関係を説明するグラフ図、図9AはRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成をより具体的にした説明図、図9Bはタグ情報取得スレッド(プログラム)と移動タグ識別スレッド(プログラム)のフローチャート、図9Cはカイ二乗検定のフローチャート、図10Aは判定基データ計算のフローチャート、図10Bは移動判定のフローチャート、図11AはRSSI、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図、図11BはRSSI、位相、ドップラー周波数のグラフを計測した時系列データを示すグラフ図、図12Aは 位相の変動についての電波受信強度(上グラフ)と位相(下グラフ)を示すグラフ図、図12Bは位相の変動についての電波受信強度(上グラフ)と位相(下グラフ)を示すグラフ図、図12Cは位相の振れの数値化例を示す図、図13Aは移動RFIDタグの水平方向と垂直方向とを説明する説明図、図13Bは一般的RFIDアンテナの電波放射パターンの説明図、図13Cは水平方向移動と垂直方向移動に関する説明図、図14Aは利用データ期間や電波受信強度最大、最小、期間前最大値を説明するグラフ図、図14Bは過読フィルタの説明図、図15Aは仲上−ライス分布の各種K及びレイリー分布での累積確率分布に関するもので、累積確率と相対的受信電力との関係を示すグラフ図、図15Bレイリーフェージングシュミレーションであり、相対的受信電力と試行回との関係を示すグラフ図、図16AはRFIDタグの移動種別を4種類に分けた概念図、図16Bは移動をフィルタするための判断基情報やフィルタ名を示す図表、図16Cはアンテナからの距離及び角度とRSSIの高低関係を示す説明図、図16Dは垂直移動に関する図13Bと同様な電波分布の説明図、図17Aはアンテナに対するRFIDタグの移動との関係の説明図、図17Bは動径成分速度の変化を示すグラフ図、図17Cは通常のRFIDアンテナの放射パターンのRSSI山頂点に関する説明図、図18はパラメータ設定画面、図19は移動RFIDタグの設定の説明図、図20は移動RFIDタグの設定の説明図、図21Aは移動RFIDタグの設定の説明図、図21Bは移動RFIDタグの設定の説明図、図22はパラメータ変更画面、図23は移動RFIDタグ識別の設定画面の説明図、図24は移動RFIDタグ識別の設定画面の説明図、図25はパラメータ変更画面、図26はアンテナが2つの場合の移動RFIDタグ識別の設定画面の説明図、図27はパラメータ変更のフローチャート、図28はパラメータ変更・設定のフローチャート、図29はRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成の他の例を示す説明図、図30は倉庫内盗難品検知への応用例を示す説明図、図31は倉庫内棚卸への応用例を示す説明図である。
【0023】
本発明の本質は、RFIDタグ移動識別方法及びRFIDタグ移動識別プログラムであり、機種に依存されない一般的に用いられているRFIDリーダ10と、機種に依存されない一般的に用いられているアンテナ20によって読取られたRFIDタグの電波受信強度や位相及びドップラー周波数の時系列データに基づき、アンテナ20前を移動したRFIDタグと静止したままのRFIDタグを識別するRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムにある。RFIDリーダ10は、その周囲に存在するRFIDタグとの間において無線電波を送受信することによってRFIDタグを探索してRFIDタグの情報(データ)を読み取るものである。
【0024】
本発明に係るRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムは、RFIDリーダ10を制御するコンピュータ装置C、或いはRFIDリーダ10の動作を制御することによって行われる。これを図1及び図2を用いて概念的に説明すると、RFIDリーダ10で読取られた全てのRFIDタグの情報から静止RFIDタグと判断できるものを、静止RFIDタグフィルタFとしての個別静止RFIDタグフィルタで除いていくことにより移動RFIDタグを識別するものである。表1はRFIDタグフィルタ一覧である。
【表1】
【0025】
公知のコンピュータ装置Cとしては、不図示のCPU及びメモリ(ROM,RAM,HDD等)、Wi−Fi(登録商標)、Wi−Fi(登録商標)と接続された出入力アンテナと、電源アダプタ、I/O(出入力)手段、I/O(出入力)手段と接続されたセンサ(光センサ、)、スイッチ等を備えており、メモリに格納されたRFIDタグ移動識別プログラムに基づき、CPUによって、送信出力、もしくはアンテナ20を制御するものである。本実施形態のRFIDリーダ10は、コンピュータ装置Cと接続されている。
【0026】
本実施形態のRFIDリーダ10或いはコンピュータ装置Cは、アンテナ20に対して、人や物品(商品)に付されたRFIDタグが移動した場合に、電波受信強度、位相、ドップラー周波数が時系列で刻々と変化することを検知して、人や物品(商品)に付されたRFIDタグの移動、静止を認識するように制御する。
【0027】
人や物品(商品)には、その個々を識別可能とするための商品コードや個品IDなどが記憶されているRFIDタグが取り付けられている。本発明に係るRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムによって、移動RFIDタグと識別されたものを、上記人や物品(商品)の移動、購買、管理等に利用できる。なお、商品の棚などの場合には、棚の各段に、その棚位置およびその位置範囲を特定するために、棚の所定位置(角部など)にはRFIDタグが取り付けられている。ここで、1つの棚(3次元直方体領域)を構成する所定の部分(例えば角部)には、それぞれRFIDタグが配置されており、このRFIDタグによって当該棚の位置範囲を特定するようにしている。
【0028】
一般に、RFIDリーダ10に備えられたアンテナ20は、静止したRFIDタグ32については、図1で示すように、読取りが常時可能であるが、アンテナ20前を、RFIDタグ30を持った人や、RFIDタグ30が付着した物が通過することにより、図1で示す静止したRFIDタグ31の位置にあるような場合は、通過物の陰に隠れ、ある期間(時間)の間、読取れなくなる場合がある。また静止したRFIDタグ31で示すような場所の場合は、人や物に反射した電波により短い期間だけ読みとれる場合がある(図3を参照)。これらを、後述する静止したRFIDタグと判断する静止RFIDタグフィルタFによって、識別して、静止したRFIDタグを除き、移動しているRFIDタグを特定するものである。
【0029】
このとき、静止RFIDタグフィルタFとして、一定期間中の読取回数に閾値を設ける技術がある。RFIDタグを読み続けることができる場合のRFIDタグ1枚あたり秒間読取可能回数は、RFIDリーダ10の無線通信パラメータにより、例えば読取中RFIDタグ枚数を独立変数とした多項式関数や累乗曲線関数で計算することができる(図4を参照)。この計算値に一定割合をかけた閾値より秒間読取可能回数が少ない場合に、静止したRFIDタグと判定することができる。例えばある時点のRFIDタグ読取枚数が20枚である場合の閾値を図4で示すようにAとして設定できる。
【0030】
また、静止RFIDタグフィルタFとして、RFIDタグからの電波受信強度が距離の4乗に反比例する性質、アンテナ20の電波放射特性、などから移動したRFIDタグの電波受信強度時系列グラフは通常山型となるので、このことを利用する技術がある。例えば、図5に示すようなアンテナ20前を移動したRFIDタグ及び静止したままのRFIDタグでは、グラフに表すと、図6のように、移動タグのみが山型になるものである。山型全体やその登り部分を線形・非線形曲線との適合度判定、強度最大値と最小値の差、時系列で前の点から上昇した点の割合といった各種算術的・統計的手法により判定することで静止したRFIDタグを特定することが可能となる。
【0031】
さらに、静止RFIDタグフィルタFとして、人や物、特に金属が含まれたカゴ車や台車等がアンテナ20前を移動することによる電波の乱反射やマルチパスフェージング、前記した図1で示したような静止したRFIDタグ31のような場所の場合のように、物陰に隠れ電波が遮蔽され受信強度が一時的に下落するときには、静止したRFIDタグにおいても、図7で示すように、例えば時間軸点6以降のような山型のグラフとなることがある。この場合、前の時間軸データまで遡り電波受信強度が高い点があるかを判定すること等により図7のような谷型を検出する技術により、静止したRFIDタグと識別することが可能となる。
【0032】
さらに、RFIDリーダ10の送信搬送波とRFIDタグからの反射で返却された搬送波をRFIDリーダ10内で合成した強度とRFIDタグの電波受信強度を比較するなどの技術により、静止したRFIDタグを特定することが可能である。つまり、2つの搬送波の位相差を0〜180度あるいは0〜360度の範囲で検知することが可能である。この機能は、RFIDリーダ10の機能として備えられている場合があり、これを利用することが可能である。一般に、アンテナ20とRFIDタグとの間の距離が1/4波長または1/2波長変化する毎に位相が1周する。例えば、周波数953MHzの場合で1/4波長は7.86cm、1/2波長は15.72cmである。
【0033】
静止したままのRFIDタグでは位相が変化せず、移動したRFIDタグは変化を続けることになる。前記周波数帯のように波長が人や物の移動距離に比較し小さい場合、人が手を振る等の少しの移動によって位相は大きく変動し、移動時の位相は、図8Aの概念グラフのように連続的に変化し一様に分布することになる。
図8Aで示す2つの時系列データの差異を標準偏差の値に閾値を設けることや二項検定、カイ二乗検定、G検定等の手法により静止したRFIDタグを識別することが可能となる。
【0034】
このとき、標準偏差はデータ数が少ない場合に、変動が大きくなり正しい識別を行えないことがある。二項検定やカイ二乗検定、G検定は、データ数が少ない場合に発生する識別精度の曖昧さを確率として表現できるため、移動時の読取回数が環境により数回〜数100回程度と大きく変動するRFIDタグ読取の場合により有効な方法である。また二項検定、カイ二乗検定、G検定等を用いた技術により、RFIDタグを識別することができる。
【0035】
図9AはRFIDタグ移動識別方法及びRFIDタグ移動識別プログラムに使用される構成をより具体的にした説明図であり、コンピュータ装置(PC)CとRFIDリーダ10とから構成され、これらはLLRP(低レベルのリーダプロトコル)でインターネットやイントラネットで使用されるプロトコル(TCP/IP)を利用して接続されている。これらのコンピュータ装置(PC)CとRFIDリーダ10は汎用のものであり、本発明のために特別形成されたものではない。またRFIDリーダ10は、汎用入出力(GPIO)によってセンサやスイッチ、パトライト(登録商標)等と接続することができる。
【0036】
コンピュータ装置Cには、識別パラメータ設定ツール、識別パラメータ保存ファイル、上位に位置する上位アプリケーション(上位アプリ:RFIDタグデータ表示や保存を行う)、ミドルウエア(ナイスミドル)、RFIDタグ識別エンジン等が、OS上で稼働するように構成されている。図9Aの例では、OSとしてWindowsXP(登録商標)、Windows7(登録商標)を用いた例を示している。
【0037】
図9Bは、タグ情報取得スレッド(プログラム)と移動タグ識別スレッド(プログラム)のフローチャートである。
本実施形態において、タグ情報取得はステップS10〜S15で行われるものであり、コンピュータ装置CとRFIDリーダ10との接続処理(S10)を行い、次に、アンテナ20から電波を送信し、RFIDタグから情報の読取を開始する(ステップS11)。ステップS12〜ステップS15はループとなっており、ステップS12で、読取ったRFIDタグの情報を取得し、読取ったRFIDタグの情報をメモリ(記憶媒体)であるハードディスク等に保存する。またステップS14ではメモリ(記憶媒体)であるRAM等に保持する。このループによりRFIDタグの枚数とそれぞれの読取回数を掛け合わせた数の読取情報が取得される。ここで、RFIDタグ情報は、読取時刻履歴、読取アンテナ履歴、電波受信強度履歴、位相履歴、ドップラー周波数履歴等の情報を取得するものである。
【0038】
これらのRFIDタグ情報は、次の移動タグ識別におけるステップS25の判定基データ計算で利用される。
本実施形態において、移動タグ識別はステップS21〜S32でおこなわれるもので、ステップS22〜S32、ステップS23〜S31、ステップS24〜S29は、それぞれループとなっており、ステップS21で識別パラメータ設定ファイルを読取り各種パラメータをRAM等のメモリに格納する処理を行う。
【0039】
ステップS23では個別RFIDタグの移動判定処理を行う。次に、ステップS24で利用データ期間中の移動判定処理を行う。次にステップS25で判定基データの計算処理を行う。このとき、秒間読取回数、最大電波受信強度、最大−最小電波受信強度、電波受信強度上昇割合、期間中最大 - 期間前最大電波受信強度、位相変動カイ二乗片側確率、ドップラー周波数平均値などが計算される。このときのステップS25の処理は後述する。
【0040】
このようにしてステップS25の処理の後で、ステップS26で移動判定処理を行う。この時のステップS26の処理は後述する。次に、移動RFIDタグが移動かどうかを判断する(ステップS27)。移動RFIDタグの場合(ステップS27:Yes)、移動タグとして処理を行う(ステップS28)。これにより画面表示、上位アプリケーション・サーバへの送信処理等を行う。ステップS28の後で、判定対象タグがまだある場合にはステップS23〜S31のループ処理を継続する。移動RFIDタグでない場合(ステップS27:No)、利用データ期間を0.1秒増やして移動判定処理を行う(ステップS24〜S29)。移動と判定できない場合には利用データ期間上限に到達するまでステップS24〜S29のループを継続する。静止していると判定できる場合には、ステップS30で静止RFIDタグとして処理する。判定対象タグがまだある場合にはステップS23〜S31のループ処理を継続する。以上のようにして、ステップS22からステップS32までを繰り返す。
【0041】
ステップS25の判定基データ計算の詳細フローチャートが図10Aである。計算の際に用いられる各種パラメータ(山頂期間割合、ドップラー周波数取得期間割合、期間前データ取得期間)はステップS21(図9B)において設定ファイルからメモリ内に読みこまれたものである。
【0042】
ステップS70において計算の過程で使用される各種変数を初期化する。数値のカウントや合計を格納する変数は初期値を0とする。RSSIの取り得る値の範囲は−100〜30程度であるため最大値を格納する変数には―999を、最小値を格納する変数には999を初期値として格納しておくことにより、後の比較演算の初回は必ずYesとなり処理を単純化できる。
【0043】
ステップS71でステップS14でメモリ内に保持された履歴データのうち、対象タグ/対象期間のデータN個を計算対象とする。対象期間の全データを走査するためステップS72で変数iにN−1を初期値として格納し、ステップS73〜S84のループ処理でN−1から0までiを1ずつ減算しながら計算を行い、iがマイナスになった時点でループを抜ける。
【0044】
ステップS74において、山頂期間割合パラメータを基にRead_time[i]が山頂期間内のデータであるか判定を行う。山頂期間内のデータであれば(ステップS74:Yes)、RSSI[i]を用い期間中最大電波受信強度更新処理(ステップS75、S76)を行い、山頂期間内のデータでなければ(ステップS74:No)、ステップS77、S78で期間中最小電波受信強度更新処理を行う。
【0045】
ステップS79でRSSI[i]とRSSI[i−1]を比較し、過去の電波受信強度の方が低いか等しい場合(ステップS79:Yes)、ステップS80で電波受信強度上昇カウンタを1増やす。なお、この比較はi=0の場合には行わない。ステップS81において、ドップラー周波数取得期間割合パラメータを基にRead_time[i]がドップラー周波数取得期間内のデータか判定する。判定Yesの場合には、後に平均値を計算するために値を足し算すると共に、カウンタを1増やす(ステップS82)。ステップS83において、ループ終了判定のためにiを1減算するとともにデータカウンタを1増やす。ステップS85において、期間前データ取得期間パラメータ分データを遡りその間の電波受信強度最大値を取得する。ステップS86において各種の移動判定基データが計算される。このうち、位相変動カイ二乗片側確率の計算方法は後述する。
【0046】
ステップS26(図9B)の移動判定の詳細フローチャートが図10Bである。判定基データD1〜D7はステップS25で計算された値であり、識別パラメータP1〜P9はステップS21において設定ファイルからメモリ内に読みこまれたものである。
【0047】
ステップS60はチラ読みフィルタの処理であり、読取中RFIDタグ枚数を独立変数とした関数で計算された秒間読取可能回数とP1との積とD1とを比較する処理である。比較判定がNoの場合には、静止タグと判定され以後の処理は行わない。Yesの場合には次の判定に進む。この分岐は以後の処理で共通である。
【0048】
ステップS61はRSSI絶対値フィルタの処理である。ステップS62及びステップS63はRSSI非連続上昇フィルタの処理である。ステップS64はRSSI谷型フィルタの処理である。ステップS65は位相振れ少フィルタの処理である。ステップS66で垂直方向移動フィルタ使用の有無を判定し、判定Yesの場合には垂直方向移動フィルタの処理であるステップS67を実行する。ステップS67まで全てYESの場合移動タグと判定される。またステップS66の判定がNoの場合にはステップS67を実行せずに移動タグと判定される。
なお、垂直方向移動とは、図13Aに図示されるように、アンテナの電波放射面に垂直な方向、水平方向移動とは電波放射面に水平な方向への移動を意味する。
【0049】
上記した二項検定は一様分布である確率をかなり正確に求めることができるが、データ数が多い場合に計算量が膨大となってしまう欠点がある。カイ二乗検定やG検定は計算量が少なく二項検定を高い精度で近似できるため有用な手法である。しかしいずれの手法とも図8Bのように人等の移動を契機に位相の値が前半・後半で2つのグループに分かれた場合、一様分布と判定され移動タグと誤識別されてしまう場合がある。
【0050】
上記状況のような場合においても、期間中のデータを前半・後半に分けそれぞれで観測頻度を計算することにより、静止タグと識別できるように構成することが可能である。図9Cは、このように、期間中のデータを前半・後半に分けて観測頻度の計算を行う場合を説明するカイ二乗検定のフローチャートであり、図9Cのフローチャートに基づいて説明する。このフローチャートの処理は、それぞれのRFIDタグの利用データ期間毎に行うものである。
【0051】
図9Cのフローチャートは、図9Bにおける移動タグ識別スレッド内の位相変動カイ二乗片側確率を求めるための「判定基データ計算」(ステップS25)の処理に相当する。
この「判定基データ計算」の処理は次のように行われる。
ステップS40において対象タグの対象期間中M個の位相履歴データをメモリから取得する処理を行う。このデータは図9Bにおけるタグ情報取得スレッド(プログラム)処理のステップS14で示す「読取タグ情報メモリ保持」処理によって既に得られたものである。以下、例えば、位相が0〜180°の範囲のデータが、RFIDリーダ10から返却されるケースに基づいて説明をする。位相履歴データが配列Phase_angle[0]〜Phase_angle[M-1],対応する読取時刻履歴データが配列Read_time[0]〜Read_time[M-1]に格納されているものとする。なお以降で角度はラジアンではなく[°]と統一して記述する。Cos,Sinの引数やArctanの戻り値も[°]で計算されるものとする。
【0052】
ステップS41〜S45は、後に位相平均値を求めるための前処理として位相ベクトル和を計算するためのループである。位相は180°の周期データあるためその平均値を算術平均で求めると好ましくない場合がある。例えば静止RFIDタグが風等により微小に振れた場合やRFIDリーダ10内部のノイズ等によって図8Cのように0°(=180°)を挟んだ時系列データとなった場合、その平均値を算術平均で得られる90°としてしまうと変動の大きいデータと見なされ移動RFIDタグと誤認識してしまう場合がある。この場合の平均は0°とした方が望ましい。まず、期間中の前半か後半かで別の平均値とするためにステップS42で期間中の前半かどうか判断する。前半である場合にはステップS43の処理を行い、後半である場合にはステップS44の処理を行う。これらは0〜180°の元データを2倍し0〜360°に変換してその角度をxy平面上に持つ単位ベクトル和を計算する処理である。前半と後半で別の変数を設け、それぞれ以下式で計算する。ステップS43は
Sum_unit_vector_x_anterior
= Sum_unit_vector_x_anterior + Cos(Phase_angle[x]*2)
Sum_unit_vector_y_anterior
= Sum_unit_vector_y_anterior + Sin(Phase_angle[x]*2)
ステップS44は
Sum_unit_vector_x_posterior
= Sum_unit_vector_x_posterior + Cos(Phase_angle[x]*2)
Sum_unit_vector_y_posterior
= Sum_unit_vector_y_posterior + Sin(Phase_angle[x]*2)
である。
【0053】
ステップS46において、先に計算された単位ベクトル和のx,y座標からその角度を以下式で計算することにより期間前半・後半それぞれの位相平均値を求める。
Average_phase_angle_anterior=Atan2(Sum_unit_vector_y_anterior,
Sum_unit_vector_x_anterior)
Average_phase_angle_posterior=Atan2(Sum_unit_vector_y_posterior,
Sum_unit_vector_x_posterior)
ここでAtan2(y,x)は以下を表す関数である。
x>=0の場合 Arctan(y/x)
x<=0の場合 Sign(y)180+Arctan(y/x)
(Sign(y)はyの符号)
【0054】
ステップS47〜S55は後にカイ二乗値を計算するために各位相を、平均値からの差が90°未満であるデータとそれ以外(90〜180°)に分けてそれぞれの観測頻度をカウントするためのループである。ステップS48では、期間中の前半か後半かで平均値について別の値を用いるために、期間中の前半かどうか判断する。前半である場合にはステップS49で変数Average_paに前半位相平均値を格納し、後半である場合にはステップS50で変数Average_paに後半位相平均値を格納する。そして、例えば10°と170°の角度差は160°ではなく最短距離の20°として計算するため、ステップS51で以下式を使用する。
Diff_angle =|Average_pa -
Atan2(Sin(Average_pa)+Sin(Phase_angle[x]*2),
Cos(Average_pa)+Cos(Phase_angle[x]*2))|
【0055】
ステップS51では、角度差が90°より小さいかどうかを判断する。90°より小さい場合(ステップS52:Yes)、ステップS53の処理を行い、90°より大きい場合(ステップS52:No)、ステップS54の処理を行う。これにより、M個の点を2つのグループに分けそれぞれの観測頻度をカウントする(ステップS53、S54)。
【0056】
ステップS47〜S55のループにおいて、もしデータが一様分布であれば、それぞれのグループの発生頻度期待値はM/2となり、ステップS56でその値を計算する処理を行う。
次に、ステップS57で期待値と各観測頻度との差の二乗和を期待値で割ったカイ二乗値(χ2)を以下式で求める。
χ2= ( (Observed[0] − Expected)^2 + (Observed[1] −
Expected)^2 )/Expected
さらに、ステップS58でプログラム起動時にメモリ内配列Chi_probability[]に読みとっていた「自由度1のカイ二乗分布表」からχ2に紐付けられた値を求める。配列Chi_probability[]の添え字は0以上の整数であるためχ2の値も整数に変換する。これが判定基データの「位相変動カイ二乗片側確率」となり、位相時系列データが期間前半にも後半にも偏りのない一様分布である確率を表すことになり、移動RFIDタグの場合は、この値が高くなる。
【0057】
つまり、対象期間中のM個のデータの位相平均値を求める処理を行い、平均からの差により全データをN個のグループに分ける処理を行う。上記の例では角度差により2個に分けているが、それ以外のN個のグループに分けることができる。一様分布のデータであれば全てのグループの頻度の期待値はM/Nである。さらに、各グループの出現頻度からカイ二乗統計量(χ2)を計算する処理を行う。そして、自由度N−1でカイ二乗統計量(χ2)の値が発生する片側確率(P)を求める処理を行う。このとき、プログラム動作時の処理を軽減するために予め計算された代表的な値をメモリに格納しておくことが可能である。そして、この値は、位相データが一様分布である確率とみなすことができる。
【0058】
次に、予め設定された閾値と、求めた片側確率(P)とを比較して、片側確率が閾値より大きいかどうか判定する。片側確率(P)が閾値より小さい場合、静止RFIDタグと判断し、大きい場合、移動RFIDタグと判断する。
【0059】
このようにして、移動か静止かの識別を行うことができる。また、実際には移動していない場合に、移動と判定する誤検知をなくすことが必要な防犯ゲートのような応用では、閾値の値を高めに設定することで誤検知を減らすことができる。
【0060】
ところで、前述した位相を利用した技術だけでは、本来検知したくないアンテナ20から遠く離れた場所や、アンテナ20の横や裏での移動についても検知してしまう可能性が残ってしまう。また電波受信強度を利用した技術だけでは、人や物が長時間電波を遮蔽した後に移動することにより移動誤検知が発生する可能性が残ってしまう。そこで、誤検知の可能性を少なくするために、秒間読取可能回数を利用した技術を含めた、複数の技術によって、個別静止RFIDタグフィルタを構成させて、これらを組み合わせ、或いは全ての技術から構成される個別静止RFIDタグフィルタを用いることにより、RFIDタグの高精度な移動識別が可能となる。
【0061】
図12Bは、図1で示す静止した場所にあるRFIDタグ31のような場合を想定し、実際にRFIDタグ31を配置し、RFIDタグを有しない人がアンテナ20前に長時間立ち電波遮蔽を行った後に離れた際におけるタグ31の電波受信強度(上グラフ)及び位相(下グラフ:0〜180度。)を計測した時系列データを示すグラフ図である。上グラフの直線で囲まれた期間T1において、一定以上の秒間読取回数での電波受信強度山型(山の登り)を検知したが、その期間T1中や期間前後の位相の値は一様に分布していないため、このように位相の値が一様に分布していない場合には、静止したRFIDタグであると識別することが可能である。
【0062】
上記位相の変化の傾きは、アンテナ20に接近している場合と、離れている場合で逆向きとなる。この変曲点発生時と電波受信強度の山頂発生時点を比較することで、RFIDタグがアンテナ20と水平方向に移動したか、垂直方向に移動したかを識別することが可能となる。このため、セキュリティゲート等の応用において重要となるゲート前を通過したRFIDタグだけを検知することが可能となる。
【0063】
図11Aは人がタグの貼付されたシャツを手に持ちアンテナ近くを水平方向に歩行した実際の時系列データであり、上からRSSI、位相、ドップラー周波数のグラフである。x軸の単位は秒であり、左に行くほど過去のデータを示す。RSSIグラフ上の2本の垂直線で囲まれた期間(−2.2〜−1.3秒)のデータで移動と識別した。図の−1.5秒付近においてRSSI山頂点が発生しているがこの近辺で位相の変曲点とドップラー周波数0点が発生している。
【0064】
位相は式(5)で示されるようにタグとリーダアンテナ動径方向距離の関数でありアンテナに近づいている時と離れている時ではその変化の方向が反転し、速度0[m/s]地点でグラフに変曲点が発生する。位相変化の情報を得るためには2点の読取データが必要であるが、その読取点間に7.86cm以上の移動(周波数953MHzで位相0〜180°の場合)が発生した場合にはその変化の方向は2通りあり識別できない。同時読取タグ枚数やタグ応答データ量が多い場合のように読取点間隔が空いてしまうと正しい変化の方向を検知できない場合がある。
【0065】
一方式(6)で表されるドップラー周波数は、1点の読み取りデータで情報を得ることができるため高速に移動した場合でもその符号によって変化の方向を検知できる。式(6)を変形した式(7)によってタグの動径方向移動速度が得られる。
【数1】
【0066】
【数2】
図11A及び図11Bのドップラー周波数グラフ縦軸の単位は[Hz]であるが、値に1.1をかけることでほぼ時速[km/h]に換算できる。
【0067】
図11Bは図11Aと同環境でアンテナ裏面→表面方向に歩行を行ったデータである。位相のグラフの−1.0秒付近において180°近くから0°近くの点に遷移し下向きの線が引かれているが、位相は周期データであるためこの期間の変化の傾きは実際には正である。その後の−0.9秒付近に固まった2点の傾きは負であることから位相変曲点は−0.95秒近辺で発生しておりその付近のドップラー周波数は0に近くなっている。−0.3秒付近においてRSSI山頂点が発生しているがこの近辺で位相の傾きは負、ドップラー周波数はマイナスの値になっている。ドップラー周波数0点からRSSI山頂点発生までには0.65秒程度の時間差が発生したことになる。
【0068】
以上から、RSSI山頂点発生と位相変曲点またはドップラー周波数0点発生の時間差が生じた場合に垂直方向移動と識別可能であることがわかる。なお、図11A、図11Bのドップラー周波数グラフは揺れが発生しているが、これは人の手の振れや上下方向の揺れ等が影響していると考えられる。この影響を考慮し、図9Bで示す判定基データ計算では1点のみの値ではなくある程度の期間中でのドップラー周波数平均値を計算している。
【0069】
図12Aは移動タグの電波受信強度(上グラフ)と位相(下グラフ)を示すグラフ図であり、移動中のRFIDタグの位相は、通常この図のように変動し続ける。また図12Bのように静止した状態のRFIDタグは、この図の下グラフの○部分のように一定の値を取り続ける。アンテナ前に人が長時間とどまったあと、移動したために、人の後ろに隠れていた静止タグに電波受信強度変化が発生(直線で囲まれた部分)し移動タグと誤認識された例であり、この期間の位相の振れは上の本当の移動RFIDタグに比べて低いことがわかる。
【0070】
なお、図12Cは、位相の振れの数値化例を示す図で、この図12Cのように、0〜100の間で数値化される。位相振れ少フィルタの閾値に低い値を設定すると、より多くのRFIDタグが移動RFIDタグと識別される。0と設定することで全てのRFIDタグが移動候補RFIDタグになり(フィルタ無)、100とすることで全てが静止RFIDタグと識別される。デフォルト値は5であるが、識別パラメータ設定ツールにて適宜調整可能である。
【0071】
以上のように、各種静止RFIDタグフィルタFは、その使用の有無、閾値等が、RFIDリーダ10の電波出力や性能、使用アンテナ20、RFIDタグの性能、周囲の静止RFIDタグの想定位置、RFIDタグの枚数等の環境により最適なパラメータが異なることになる。このような最適なパラメータが異なるために、実際の読取環境において、予め、確認のために、RFIDタグを移動し、その挙動やデータの収集等を行い、これらを基に環境の差が吸収された最適なパラメータを求めることが好ましい。
【0072】
本発明の応用用途によってはRFIDタグのアンテナからの距離や移動方向によって移動タグも更にフィルタすることが必要な場合がある。例えば入出荷ゲートが複数存在する倉庫の入出荷検品で本発明が用いられる場合、アンテナが設置されたゲートでのタグ移動のみを検知し隣接する離れたゲートでの移動は検知したくないことがある。また、盗難防止ゲートに本発明が使用される場合にはアンテナ前を水平方向に移動した盗難可能性品のみを検知し店内での買い物客の移動に相当する垂直方向移動は検知したくない場合が多い。図16Aが移動種別を4種類に分けた概念図で、図16Bがそれぞれの移動をフィルタするための判断基情報やフィルタ名である。
【0073】
アンテナ遠くの水平方向移動の場合には、図16C上部の破線矢印のようにアンテナ放射パターン上はRSSIが高い所のみでの移動となり、またアンテナ動径方向の距離減少が小さいことから「RSSI非連続上昇フィルタ」により排除できることが多い。また、フリスの公式から距離が離れた場所でのRSSIは低くなり、レイリー分布や仲上−ライス分布で示されるようにRSSI上振れはほとんど発生しないことから「RSSI絶対値フィルタ」も有効となる。さらに、遠くのタグには十分な電力が供給されにくく読みにくいことから「チラ読みフィルタ」も有用となる場合がある。逆に、アンテナ遠くの移動も検知したい場合にはこれらフィルタの閾値を甘く設定する。
【0074】
図16DのC地点からD地点のようなアンテナ表面→裏面方向の垂直方向移動の場合、距離が1/2になることによりRSSIが+12dBとなるがアンテナ放射パターンから−20dBとなって、合計−8dBとなり「RSSI非連続上昇フィルタ」でフィルタ可能である。
一方、図16DのE地点からF地点のようなアンテナ裏面→表面方向の垂直方向移動の場合では、アンテナ放射パターンよりRSSI上昇は+30dB以上にもなるため「RSSI非連続上昇フィルタ」等でフィルタすることは難しい。そこで垂直方向移動の場合にはRSSI山頂点発生時に動径成分速度が0とならないことを利用しフィルタを行う。以下その方法について説明する。
【0075】
図17AのようにタグがアンテナからA[m]地点を速度v[m/s]で水平方向に移動する場合、アンテナ中心に向かう動径方向(図の点線)成分の速度はv・cosθで与えられ、θ=90°となるx=0[m]地点では0[m/s]になる。図17Bは速度1.11[m/s] (時速4km)で、図17Aのxを−1.5[m]〜1.5[m]の範囲で移動した場合の動径成分速度の変化である。アンテナに向かう方向の速度をプラス、離れる方向の速度をマイナスとした。図17A中の×点(x=0)でアンテナ放射パターン及び直線距離上からRSSIは最大となるがこの点での動径成分速度は0となる。
【0076】
一方、図17Cで示される垂直方向移動の場合、水平方向移動時と同様にx軸上の点で動径成分速度が0[m/s]となるが、アンテナ裏面や側面への電波放射は小さいという通常のRFIDアンテナの放射パターンによってRSSI山頂点はx軸上ではなく通常×点のような場所となる。その時点での動径成分速度は表面→裏面移動の場合はプラス、裏面→表面移動の場合はマイナスとなる。
【0077】
次に、より具体的に説明する。
コンピュータ装置Cは、公知の構成からなるもので、CPU,記憶装置(外部記憶装置を含むもので、HDD,RAM,ROM、CD,DVD,BL,フラッシュメモリ等を含むその他のメモリ等)、ディスプレイ、入力部(キーボード、マウス、タッチパネル)、出力部(電波、音波、光その他の通信手段との間の出力関係を含む)等を備えている。
【0078】
本実施形態では、図1で示すように、RFIDリーダ10と、コンピュータ装置Cは接続されている。そして、アンテナ20で信号を受信し、コンピュータ装置Cは、RFIDリーダ10からの情報を受け取り、RFIDリーダ10を制御するように構成されている。なお、この実施形態では、コンピュータ装置CによってRFIDリーダ10を制御するように構成した例を示しているが、RFIDリーダ10にコンピュータ装置Cと同様な構成を搭載することにより、RFIDリーダ10のみで、制御するように構成することができるのは勿論である。
【0079】
本実施形態におけるRFIDタグ移動識別プログラムは、以下の3つのモジュール(ソフトウェア:プログラム)から構成されている。
1.識別パラメータ設定ツール
2.移動タグ識別エンジン
3.LLRPミドルウエア「ナイスミドル」(商標:以下同じ)
これらのモジュール(ソフトウエア:プログラム)は、OS上で動作するものであり、本実施形態ではWindowsXP(登録商標)或いはWindows7(登録商標)で動作するようになっている。
【0080】
そして、識別パラメータ設定ツールで環境を設定し、次に移動タグ識別エンジンで識別し、LLRPミドルウエア「ナイスミドル」で、移動タグ識別エンジンのフロントエンドとして上位アプリとのインターフェース(I/F)機能を提供する。これにより、それぞれの目的ごとの機能のみを搭載したアプリケーションを開発するようになっている。アプリケーションとしては、例えば、RFIDタグを用いた入出荷検品、在庫管理、入退出管理、盗難品検知、観客管理、商品管理、商品やサービスの販売管理、その他の多くのRFIDタグの移動によって生じる各種管理等を行うアプリケーションを構築することが可能となる。
【0081】
まず読取環境(アンテナ20の構成・使用するRFIDタグ・移動速度・電波出力等)により最適な識別方法やパラメータが異なるため、実環境において最適となるようにパラメータを設定するが、上記の「識別パラメータ設定ツール」を起動する。
この「識別パラメータ設定ツール」により、所定のRFIDタグを移動させた後、その環境における判定パラメータを計算し設定することができる。設定内容は「識別パラメータ保存ファイル」に保存され、「移動タグ識別エンジン」において使用されるようになる。なお、パラメータによっては「識別パラメータ設定ツール」でのみ使用され、「移動タグ識別エンジン」で使用されないものも存在する(リーダIPアドレスや送信出力等、設定画面で青字の項目)。これらは上位アプリからLLRPミドルウエア(ナイスミドル)に設定するように構成される。
【0082】
次に、識別パラメータ設定ツールの使用方法について、画面遷移に基づいて説明する。
まず、PickMovedTagsParamsAutoConfigTool.exeをダブルクリックして識別パラメータ設定ツールを起動する。図18で示す設定画面において、「移動識別パラメータ」タブで接続するRFIDリーダ10の設定を行う。
この設定画面では、上記RFIDリーダ10設定の他に、識別オプション、ログ出力、移動識別パラメータ、識別対象EPC、EPC別の移動識別パラメータ等を設定する。ここで、EPC(Electric Product Code)とは、ICタグを利用して製品識別を行う場合に利用されるコードであり、商品識別コード、輸送用のコンテナなどの識別コード、事業所コード、返却可能な資産の識別コード、企業内の資産管理コードなどが組み込まれているものである。
【0083】
RFIDリーダ設定では、リーダIPアドレス、送信出力(電波出力)、無線チャンネル、アンテナ番号等を特定することができる。
識別オプション(移動識別)では、垂直方向移動フィルタ使用の有無、移動方向表示の有無、アンテナグループを複数設定可能となっており、各グループのアンテナ(本実施形態ではグループA,Bともにアンテナ1〜4)を指定可能となっている。
ログ出力では、移動識別サマリログ、リプレイ用ログ、使用パラメータバックアップが選択可能となっている。
「移動識別パラメータ」では、設定により移動識別対象となるEPCを絞ることが可能である。対象外のEPCではOnMovedTagReportイベントが発生しなくなる。
【0084】
移動識別パラメータでは、利用データ期間、秒間読取回数必要割合(%)、必要RSSI(dBm)、必要RSSI差(dB)、RSSI増加発生必要割合(%)、期間前最大RSSIからの必要増分(dB)、必要位相振れ等の設定が可能となっている。
【0085】
識別対象EPCとEPC別パラメータ設定について説明すると、識別対象EPCは、記入欄が設けられ、この記入欄が空欄の場合には、全EPCが対象となる。記入の場合には、EPC先頭を16進数で記述し、複数指定するときは改行して記入する。また、EPC毎に別の移動識別パラメータを、設定で4つまで設定可能となっている。EPC別の移動識別パラメータは、EPC先頭、必要RSSI(dBm)、必要RSSI差(dB)、期間前最大RSSIからの必要増分(dB)の記入欄が設けられている。
【0086】
識別対象EPC及び使用されるパラメータは、図27で示すフローチャートのようにして決定される。すなわち、ステップS100でタグ読取(EPC=X)を行う。次に、ステップS101で、識別対象EPCが空欄かどうか判断する。空欄である場合(ステップS101:Yes)、ステップS102で、EPC別の識別パラメータで、EPC先頭の何れかを判断する。先頭の何れかである場合(ステップS102:Yes)、ステップS103でEPC別の移動識別パラメータの該当パラメータを使用し移動識別実施処理を行う。そして、ステップS100へ戻り、次の読取タグの処理を同様に行う。空欄でない場合(ステップS101:No)、ステップS104で識別対象EPCの何れかかどうか判断する。識別対象EPCの何れかでない場合(ステップS104:No)、ステップS100へ戻り、次の読取タグの処理を同様に行う。
【0087】
識別対象EPCの何れかである場合(ステップS104:Yes)、ステップS102の判断を行う。ステップS102においてEPC別の識別パラメータで、EPC先頭の何れかを判断するが、先頭の何れかでない場合(ステップS102:No)ステップS105で、移動タグ識別パラメータを使用し移動識別実施処理を行う。そして、ステップS100へ戻り、次の読取タグの処理を同様に行う。
【0088】
前記した図18で示す設定画面で、パラメータを設定した場合には、保存ボタンを押下し、識別パラメータ保存ファイルに保存する。
次に、図19で示す移動タグ識別をする画面では、上下及び二段に分割された画面で、上段側には、移動タグの欄と、静止タグの欄、下段には、RFIDタグからのデータの受信記録の時系列グラフが表示される。また、この画面には、「オープン/クローズ」ボタン、「スタート/ストップ」ボタン、「クリア」ボタン、「リプレイ」ボタンが設けられている。「リプレイ」ボタンは、リプレイ機能を行うもので、パラメータ変更後の動作確認(設定内容確認)を行うことができるものである。
【0089】
そして、「オープン」ボタンを押下後、「スタート」ボタンを押下することで読取が開始され、現在のパラメータで移動と識別されたRFIDタグが「移動タグ」欄に、静止と識別されたものが「静止タグ」欄に表示される。移動タグは利用データ期間の開始・終了点に垂直な棒がグラフ表示される。この実施形態では、画面に表示されるRFIDタグの総数は2048個までとなっているが、これに限るものではない。
【0090】
RFIDタグが移動したにも拘わらず、静止したRFIDタグであると識別された場合、図20で示すように、このRFIDタグ(図20の場合は赤シャツ1)を一覧から選択し、マウスの場合、右クリックで「このタグを”移動”と識別させる」を選択する。このようにすると、図21Aで示すように、該当するRFIDタグのグラフだけが、下部に表示される。そして、移動と識別すべき期間の開始点と終了点を選択する。選択はマウスの場合、左クリックで行う。このとき、図21A、図21Bで示すように、「開始(終了)点を選んで下さい」というメッセージの下部に数値が表示される点を選択することができる。このようにして、安定的に読取が行われている範囲の電波受信強度増加開始点から終了点を選択する。
なお、選択のキャンセルは、グラフの点がないエリアをダブルクリックすることにより行う。
【0091】
上記のように、選択した範囲のデータを「移動」と識別するときには、図22で示すように、パラメータ変更の画面が、表示される。このパラメータ変更画面は、「このタグを“移動”と識別するためには以下青色欄のパラメータを変更下さい」とのメッセージと共に、このRFIDタグの値、“移動”とするための値、青色欄を変更についての欄が表示されており、秒間読取回数必要割合(%)、最大RSSI(dBm)、RSSI差(dB)、RSSI増加発生必要割合(%)、期間前最大RSSIからの必要増分(dB)、利用データ期間、位相振れに対する変更が必要なパラメータが青字で表示される。本実施形態では、「“移動”とするための値」の箇所に変更するための値(本実施形態では期間前最大RSSIからの増分を「12.5以下」)が表示される。そして、青色欄の数値を変更し、「保存」ボタンを押下する。
【0092】
また、パラメータ変更後の動作確認を行うために、図23で示すように、「リプレイ」ボタンを押下し、該当リプレイ用ログを選択することにより、パラメータ変更後の動作確認を行うことが可能となる。本実施形態では、「リプレイ」ボタンの下部には、ログファイル名が表示される。また本実施形態では、長期間(1分以上)のログが保存されているデータのリプレイには対応しない設定になっているが、これに限るものではない。読取時のアンテナ番号とリプレイ時の設定が異なる場合には、一覧で選択したRFIDタグのグラフが選択されないので、設定を合わせて使用することになる。
【0093】
一方、移動と識別されたRFIDタグを“静止”とするには、図24で示すように、該当RFIDタグを右クリックして「このタグを“静止”と識別させる」を選択する。これにより、図25で示すように、「このタグを“静止”と識別するには以下のいずれかのパラメータを変更下さい」とのメッセージと共に、このRFIDタグの値、“静止”とするための値、いずれかを変更の欄で、秒間読取回数必要割合(%)、最大RSSI(dBm)、RSSI差(dB)、RSSI増加発生必要割合(%)、期間前最大RSSIからの必要増分(dB)、利用データ期間、位相振れに対する変更可能なパラメータが青字で表示される。本実施形態では、これらの項目のうち変更する項目である「いずれかを変更」の欄が青色として表示されると共に、“静止”とするための値についてのガイダンスが表示される。
そこで、いずれか1つ以上の数値を「“静止”とするための値」に変更し、「保存」ボタンを押下する。
【0094】
アンテナ20が複数枚設定されている場合は、それぞれのアンテナ20で移動識別が行われる。図26で示す例は、同じRFIDタグがアンテナ20(二つある場合の両方)の前を通過したケースである。なお、移動識別パラメータ画面でアンテナ20設定を変更後は、「クローズ」、次に「オープン」ボタンを押下し、RFIDリーダ10へ再接続を行う。
【0095】
次にログファイルについて説明する。
識別パラメータ設定ツールでは、移動識別サマリログと、リプレイ用ログと、使用パラメータバックアップと、エラーログの4つのログファイルが出力される。移動識別サマリログ、リプレイ用ログと使用パラメータバックアップの出力有無は「移動識別パラメータ」の画面で設定可能となっている。
(1)移動識別サマリログ
「読取状況グラフ表示」の画面で静止や移動と表示されたタイミングでタグ情報が保存される。移動したタグは初めに「静止」と出力された後に「移動」が出力される。
.\LOG ディレクトリ配下にスタートボタンを押下した日付・時刻のファイル名で作成される。
ファイル名例:
SUMMARY_2010_1217_1115_45.csv
出力内容は 「タグ情報表示時PC時刻, 静止・移動種別, EPC, PCBits,
ReaderIp, AntennaId, RSSI,(移動タグの場合は表2の6以降の情報)
出力例:
2010/12/24 19:07:40.108,STATIC,00000000000000000000B302,3000,192.168.55.31,1,-59
2010/12/24 19:07:43.061,MOVED,00000000000000000000B302,3000,192.168.55.31,1,-32,0.8,1293217662.753,1293217663.538,30,1.293,18.0,0.448,16.5,13.80,04
(2)リプレイ用ログ
本実施形態では、リプレイ機能用に全読取データを保存している。長時間読取実施時には出力をOFFとしておくことが好ましい。
ファイル名例:
2010_1217_1115_45.csv
(3)使用パラメータバックアップ
使用した識別パラメータのバックアップ。ツール起動後最初及びパラメータ変更発生後のスタートボタン押下時に作成される。
ファイル名例:
2011_0616_2118_27.xml
(4)エラーログ
リーダとの接続エラーやプログラムエラー等が出力される。
ファイル名: PACT_debug.log
【0096】
次に、移動タグ識別エンジンについて説明する。
前記したように、識別パラメータ設定ツールで設定された方法で移動タグ識別を行う。
本実施形態で用いるミドルウエア(ナイスミドル)は、移動タグ識別エンジンのフロントエンドとして上位アプリとのインターフェース(I/F)機能を提供するものである。上位アプリ開発者が移動タグ識別ソフトのドキュメントとナイスミドルのユーザーマニュアル・ヘルプファイル・サンプルソースを参照して、開発を行う。
【0097】
本実施形態で使用するRFIDリーダライタとしては、例えば、Impinj Speedway : F/W version 3.2.4 (LBT無版)、Impinj Speedway Revolution : F/W version 4.6.1以降 (LBT無)などを用いることができる。
【0098】
本実施形態で動作するOS,上位アプリケーションの開発環境例は、ミドルウエア「ナイスミドル」と同様にWindowsXP(登録商標)やWindows7(登録商標)OSでMicrosoft VisualStudio(登録商標)開発環境である。より具体的な構成ファイルとしては、
PickMovedTagsAgent.dll(移動タグ識別エンジン)
PickMovedTagsAgent.xml(識別パラメータ保存ファイル:編集不可)
PickMovedTagsParamsAutoConfigTool.exe(識別パラメータ設定ツール)
MightyControl.dll(識別パラメータ設定ツール構成ファイル)
EPCtoNAME.csv(識別パラメータ自動設定ツールでこのファイル内のEPCが読まれた場合、「名称 / シリアル」欄に名称を表示。名称,EPCのCSVフォーマットで記述。変更後はツールの再起動が必要。このファイルに含まれないEPCは下位3バイト(EPC欄の右側6文字)を10進数で「名称 / シリアル」欄に表示。)
log4net.dll(識別パラメータ設定ツールでエラーログ出力時に使用されるApache log4netライブラリ)
LICENSE.txt,NOTICE.txt(Apache log4netのLICENSE及びNOTICE)
.\WAVE\notify.wav(識別パラメータ設定ツールで移動タグを識別した場合に鳴る音ファイル。別のWAVEファイルをこのファイルに上書きすることで音を変更することが可能。)
.\Ja-JP\PickMovedTagsParamsAutoConfigTool.resources.dll
MightyControl.resources.dll(識別パラメータ設定ツール用”日本語(日本)”リソースファイル)
.\LOG\(ログファイル格納ディレクトリ)
その他(LLRP.dll, LLRP.Impinj.dll, LLRPNiceMW.dll, SET_READER_CONFIG.xml)はナイスミドルの構成ファイル、
などである。
【0099】
本実施形態の移動識別方法は、基本的に、全読取タグから静止タグを排除し残ったものを移動タグと認識するものである。つまり、図2で示すように、全てのRFIDタグを読み取った全読取タグデータ(移動しているRFIDタグと静止しているRFIDタグの両方)から複数の個別静止RFIDタグフィルタを用いて、静止したRFIDタグを特定し、取り除くものである。例えば、第1の個別静止タグフィルタF(1)によって、移動候補のRFIDタグを絞りこみ、この絞り込んだ移動候補のRFIDタグから、第2の個別静止RFIDタグフィルタF(2)によって、さらに絞りこみ移動候補のRFIDタグを特定する。そして、次なる個別静止RFIDタグフィルタによって、絞りこみ、さらに精度を向上させるためには、第Nの個別静止RFIDタグフィルタF(N)・・・というように複数の個別静止RFIDタグフィルタを用いるもので、最終的に移動しているRFIDタグを移動RFIDタグとして特定するものである。
【0100】
次に識別パラメータ設定ツールについて説明する。
利用データ期間中の最大値は、図14Aで示すように、利用データ期間後半の山頂部から、最小値は前半の山麓部から取得される。
また、期間前最大値取得期間を設定することができ、この期間の値を、大きくすることで、移動判定を厳しくすることが可能となる。つまり、図14Aで示すように、最大値は、期間前最大値から所定の増分となるのが通常である。
【0101】
本実施形態における個別静止タグフィルタの例としては、以下のようなものがある。すなわち、
(1)チラ読みフィルタ(利用データ期間中に秒間読取回数が閾値未満)、
(2)RSSI絶対値フィルタ(最大RSSI(最大電波受信強度)が閾値未満)、
(3)RSSI非連続上昇フィルタ(「最大−最小RSSI(電波受信強度)」が閾値未満)、(RSSI(電波受信強度)(t)>電波受信強度(t−1)である点或いはRSSI(電波受信強度)(t)<電波受信強度(t+1)である点の発生割合が閾値未満)、
(4)RSSI谷型フィルタ(RSSI(谷):期間前最大電波受信強度からの増分が閾値未満)、
(5)過読フィルタ(移動候補判定からX秒後も読取が存在(移動判定まで+X秒必要))、
(6)位相振れ少フィルタ(期間中の位相の変動から計算された検定量が閾値未満)、
である。
【0102】
上記(1)のチラ読みフィルタは、利用データ期間中に秒間読取回数が閾値未満であるが、ここで、秒間読取回数について説明する。
秒間読取可能回数は、例えばあるRFIDタグの無線パラメータ(ISO/IEC18000−6C規格のミラーサブキャリア方式でM=4, Tari=20[usec], BDR=320k)において、RFIDタグの枚数を変化させて、実際に読取を行い、1枚あたりの秒間読取数を計測する。このときのグラフが、図4で示す実線である。これはタグ枚数が10枚以下の場合に点線で示された多項式曲線(y=0.236x2−5.3339x+46.974)、10枚より上の場合に累乗曲線(y=133.34x−0.8605)によって決定係数0.9987、0.9954と高い精度で近似することができる。
他の無線パラメータを使用した場合でも同様に近似関数f(x)を求めることができ、使用中の無線パラメータと読取中タグ枚数により1枚あたり秒間読取可能回数を計算することができる。アンテナを1枚以上のN枚使用する場合にはf(x/N)/Nで計算される数値を秒間読取可能回数として使用できる。この秒間読取可能回数に設定された割合を掛けることにより秒間読取回数閾値とできる。
【0103】
上記(2)のRSSI絶対値フィルタは、最大RSSI(最大電波受信強度)が閾値未満であるが、ここで、電波受信強度について説明する。
電波受信強度は、RFIDリーダ10が受信するRFIDタグからの電波受信強度理論値は次の式(1)で表わされる。
【0104】
【数3】
上式1をdBmで表記すると、
【0105】
【数4】
となる。
【0106】
ここで、アンテナ20からの電波放射パターンは通常、図13Bのようになり、図13BのA地点とアンテナ20前のB地点を比較すると、直線距離が1/2であるため電波受信強度は+12dBとなる。この図13Bのように、A地点からB地点までタグが移動すると電波受信強度はlog Greaderの係数が20であることから20dB高くなる。上述の距離による値を加えると32dBの大きな差が連続的に傾向を持って発生することになる。
【0107】
一方、アンテナ20−タグ間には直接波以外にも床や天井、什器等での反射波・回折波が存在しそれらが全て干渉しあってマルチパスフェージングが発生する。マルチパスフェージングは仲上−ライス分布(直接波の強度が反射波や回折波に比べ強い場合)やレイリー分布(直接波の強度が弱い場合)でモデル化できることが知られており、それぞれの確率密度関数は以下の式(3)(4)で与えられる。
【0108】
仲上−ライス分布:
【数5】
ここでK=a2/2σ2は直接波平均電力(a2/2)と散乱波平均電力(σ2)の比を与える。rは信号振幅である。
【0109】
レイリー分布:
【数6】
仲上−ライス分布の各種K及びレイリー分布での累積確率分布は、前記した図15Aのようになる。
【0110】
アンテナ20前を移動するRFIDタグは、直接波が支配的となるため仲上−ライス分布(K=10やK=40)となり、この場合の電波受信強度の変動は先述の距離やアンテナ放射パターンにより発生するものに比べかなり小さいものとなることがわかる。また、アンテナ前を人や物が通過することにより静止タグにフェージングが発生した場合の受信強度変化をレイリー分布でシミュレーションしたグラフが、図15Bであり、受信強度の大きな差は発生することがあるがその変化が連続的に傾向を持って発生することは非常に稀であることがわかる。
【0111】
これらのことからマルチパスフェージングを考慮しても前述手法(山型全体やその登り部分を線形・非線形曲線との適合度判定や強度最大値と最小値の差、時系列で前の点から上昇した点の割合といった各種算術的・統計的手法)が移動タグ識別手法として有効であることがわかる。
【0112】
上記(3)のRSSI非連続上昇フィルタは、「最大−最小RSSI(電波受信強度)」が閾値未満、RSSI(電波受信強度)(t)>電波受信強度(t−1)である点或いはRSSI(電波受信強度)(t)<電波受信強度(t+1)である点の発生割合が閾値未満である。
【0113】
上記(4)のRSSI谷型フィルタは、期間前最大RSSI(電波受信強度)からの増分が閾値未満である。
【0114】
上記(5)の過読フィルタは、移動候補判定からX秒後も読取が存在(移動判定まで+X秒必要)である。図14Bはこれを説明するグラフ図である。
【0115】
上記(6)の位相振れ少フィルタは、期間中の位相の変動から計算された検定量が閾値未満であるが、ここで、位相について説明する。
位相は次の式(5)で表すことができる。
【0116】
【数7】
このうち次の3つの項はある移動判定期間中一定とみなすことができる。
θT: リーダからの電波送信時に変化する位相
θR: リーダでタグ応答波受信時に変化する位相
θTAG:タグ応答時内部で変化する位相
波長(λ)は使用周波数により定まるので、位相θはリーダ−タグ間距離(r)のみを変数とした関数となり、2π(360度)で剰余を取ることで周期関数となる。
【0117】
ミドルウエアを用いた例について、より具体的に説明すると、移動するRFIDタグの情報を受け取るには、IsPickMovedTag及びSyncLocalTimeをtrueとしMovedTagReportHandlerを設定する。また、SessionOnプロパティの設定を行わないようにする。
静止・移動の区別無く読まれたRFIDタグの全てを受け取るには、ミドルウエア(ナイスミドル)のTagReportHandlerデリゲートも設定する。
本実施形態のデリケートとしては、MovedTagReportHandler(MovedTagData)であり、LLRPAgentのOnMovedTagReportイベントを処理するメソッドを表す。
LLRPAgentクラスとしては、イベントがOnMovedTagReportという名前の場合、デリケートはMovedTagReportHandlerであり、移動したタグ情報がMovedTagData型で渡される。
パブリックプロパティとしては、IsPickMovedTagとSyncLocalTimeがあり、ミドルウエア(ナイスミドル)から移動タグ情報を取得する場合trueに設定する。
【0118】
パブリックプロパティについて、移動するRFIDタグ情報(MovedTagData)とミドルウエア(ナイスミドル)でのRFIDタグ情報(TagData)との相違を踏まえて記述する。
【表2】
【0119】
次に、サンプルソースについて記述すると、ミドルウエアのソースコードに以下太字の行を追加する。
using mightycard.rfid.llrpmw;
try{
.
.
llrpAgent.OnErrorReport
+=new ErrorReportHandler(llrpAgent_OnErrorReport);
//→移動タグ識別エンジンを使用するための設定
llrpAgent.IsPickMovedTag = true;
llrpAgent.SyncLocalTime = true;
llrpAgent.OnMovedTagReport += new MovedTagReportHandler(llrpAgent_OnMovedTagReport);
//←移動タグ識別エンジンを使用するための設定
.
.
}catch(Exception
e)
MessageBox.Show(e.Message)
}
//OnMovedTagReportイベントの処理関数
void llrpAgent_OnMovedTagReport(MovedTagData tagData)
{
MessageBox.Show(“このタグは移動しました : ” + tagData.Epc)
………………..
}
【0120】
この他に図29のようにRFIDリーダ内のLinux OS(商標)上で「移動タグ識別エンジン」を動作させ、一方、「識別パラメータ設定ツール」については、コンピュータ装置Cで動作するような形態もある。この場合LLRPミドルウエアを使用しないことになり、移動タグ識別エンジンが直接RFIDリーダのSDKからRFIDタグの情報を取得することになる。
このようにRFIDリーダ内のLinux OS(商標)上で「移動タグ識別エンジン」を動作させることができる。
次に、識別パラメータ設定ツールでのパラメータ調整手順について、図28のフローチャートに基づいて説明する。
【0121】
まずステップS109で静止RFIDタグをRFIDタグリーダの周囲に配置する。このとき実際の環境で想定される位置にRFIDタグを配置する。例えば売り場の盗難防止ゲートとしてアンテナが設置される場合、アンテナの一番近くの棚にRFIDタグ付き商品が置かれた環境で設定ツールを使用する。
次にステップS110で、不図示の操作手段により、識別パラメータ設定ツールを起動する処理を行う。次に、ステップS120で、コンピュータ装置C等の記憶装置に格納されている識別パラメータ保存ファイルを読取り、移動タグ識別エンジン(及びミドルウエア「ナイスミドル」)を使用してRFIDタグの読取りを開始する処理を行う。
ステップS130では、周囲に静止タグを配置した環境で移動と認識させたい方法で、RFIDタグを移動させる。
【0122】
ここで、「周囲に静止タグを配置した環境」とは、 実際の環境で想定される位置にRFIDタグを配置することを意味する。例えば、上述のように、売り場の盗難ゲートとしてアンテナ20が設置される場合には、アンテナ20近くの棚にRFIDタグ付き商品が置かれた環境で設定ツールを使用する。
また、「移動と識別させたい場合」とは、RFIDタグが貼付された読取対象物を実際の移動方法(フォークリフト運転や人の歩行)でアンテナ20前を移動させる。その際に読取条件を通常より厳しい方法(アンテナ20に近い場所を高速移動、アンテナ20から遠い場所を低速移動、RFIDタグにフォークの爪があたり隠れる、鞄の中に多数のRFIDタグを隠す等)で移動させ、このような状態においてパラメータを合わせることで通常の移動の場合に余裕をもって移動と識別できるパラメータになる。
【0123】
このとき、ステップS140で、静止したRFIDタグを移動しているRFIDタグと誤検知あるかどうか判別する。誤検知があると判断された場合(ステップS140:Yes)、ステップS150において、画面上で誤認識RFIDタグを選択し、パラメータの変更を行う。そして、ステップS160で、リプレイ機能を起動し、誤検知したものが解消されているかどうかを確認する。そして、ステップS130の処理へ戻る。
【0124】
一方、ステップS140で誤検知がないと判断された場合(ステップS140:No)、ステップS170で、移動RFIDタグを静止RFIDタグと誤検知あるかどうか判断する。ステップS170で誤検知があると判断された場合(ステップS170:Yes)、ステップS180で、画面上で誤認識したRFIDタグを選択し、グラフ上から移動と識別されるべき期間を選択する。そしてステップS190でツールで計算された範囲の値にパラメータを変更する処理を行う。この処理の後で、ステップS210で、リプレイ機能を起動し、誤検知したものが解消されているかどうかを確認する。そして、ステップS130の処理へ戻る。
【0125】
また、ステップS170で、誤検知がないと判断された場合(ステップS170:No)、ステップS200で識別パラメータ決定し、設定ファイルに保存する処理を行う。
【0126】
次に、本発明の応用例として倉庫や店舗での入出荷検品、店舗での盗難防止ゲート、倉庫内盗難品検知、倉庫内棚卸について説明する。それぞれの用途の目的や読取環境によって使用するフィルタやそのパラメータ設定が異なってくる。他の応用用途としては空港や工場等でコンベア上を移動するタグ付き荷物や物品の識別が上げられる。電波受信強度変化に加え位相やドップラー情報を使用することによって1枚のアンテナでも複数コンベアの読み分けや移動方向、速度の検知を行うことができる。
【0127】
まず、倉庫や店舗での入出荷検品への応用例について説明する。図1のようにアンテナ前をタグが貼付された読取対象物(洋服やバックといったアパレル製品やテレビ・携帯電話等の電気製品や部品等)を台車やフォークリフト等で通過させることで高速に大量の検品を行うことができる。この用途の特徴としてはタグが重なる等によって読みにくい(RSSIが低いままの)状況が発生し得ること、アンテナのすぐ近くに対象外タグを置かないといった環境コントロールが比較的容易であることがあげられる。
【0128】
こういった環境では例えばRSSI絶対値フィルタを使用せず、またRSSI非連続上昇フィルタのパラメータを甘くすることで読みにくいタグも移動と検知させながら、チラ読みフィルタや位相振れ少フィルタによって遠くの静止タグを排除することが可能である。
【0129】
次に、店舗での盗難防止ゲートへの応用例について説明する。図13Cのようにレジで会計が済んでいないタグ付き商品がRFIDアンテナ及びリーダが組込まれたゲート前を移動したことを検知しブザーを鳴らすことが可能となる。従来の磁界方式のゲートではゲート間距離が1mを超えると検知が難しくなるが、電磁界方式のUHF帯RFIDを使用することにより2m以上といったゲート幅でも検知可能となる。また、長距離通信の特性を活かしアンテナを天井や床下に配置することも可能である。
この応用では、ゲート周りのタグを読んでしまい、盗難を行っていない人が通過したときにブザーを鳴らしてしまうとお客の感情を害し、お店の評価を落としてしまう危険性がある。そのため全ての移動タグを検知できなくても可とし、各種移動フィルタの閾値を高めに設定することができる。図13C(A)のような水平方向移動は検知しながら(B)のような垂直方向移動はブザーを鳴らさないようにするために、まず識別パラメータ設定ツールで垂直方向に移動した場合のデータを取得し、それが静止と識別できるよう[移動識別パラメータ]欄の調整を行う。
多くの場合フィルタを厳しめに設定することで水平方向は移動と識別しながら垂直方向を静止と識別することができる。しかし、特にアンテナ近くの裏面から表面への移動時、垂直方向も識別されてしまう場合は、[識別オプション]の「垂直方向移動フィルタ」を利用すること(チェックをON)により解決することが可能である。
【0130】
さらに、倉庫内盗難品検知への応用例について説明する。図30で示すようにRFIDアンテナ20を出入口付近の天井等に設置することによって、倉庫内のタグつき物品の移動が発生した場合に検知を行うことができる。
【0131】
図30は倉庫4階で、“緑花瓶”の盗難が発生したことを地下の中央監視室で検知した例である。カメラや赤外線センサで監視する方法と違い、暗闇の中でも検知できたり、鞄の中などに隠された場合でもどの物品が盗まれたのかわかったりするのが大きな特徴である。位相は人の移動だけでも振れることがあり静止タグを移動と誤検知してしまう可能性があるが、通常人の出入りが発生することのない夜間等の監視時には位相振れ少フィルタのみを使用することによりRSSI非連続上昇フィルタ等使用時よりも広範囲の進入検知が可能となる。進入検知後にRSSI非連続上昇フィルタ等で物品の特定を行うことができる。
【0132】
次に、倉庫内棚卸への応用例について説明する。図31で示すように、倉庫200は既存のものであり、物品(商品)の高さ等に応じた棚が設けられている。この棚にはRFIDタグからなるロケーションタグ201が付されており、ロケーションタグ201が示す位置情報が得られることになる。一方、棚に格納される物品(商品)にも、その性質や数量等を含めて商品情報が記憶されたRFIDタグからなる商品タグ202が付されている。アンテナ20とRFIDリーダ10が格納されている制御装置(コンピュータ装置C)を備えた自動読取装置をフォークリフト210で移動させることにより、静止したアンテナ前をタグが移動したのと同じ状態となる。
【0133】
フォークリフト移動中にアンテナ前にあるタグのRSSIのみが大きな山型になることを利用しRSSI非連続上昇フィルタのパラメータを適切に設定することによって丁度アンテナ前に位置するロケーションタグ及び商品タグのみを検知することができる。これにより、どの位置にどの商品があるという棚卸を安全・高速に行うことができる。無線回線を通して、読取った商品情報、位置情報、紐付けた商品情報(有無含む)と位置情報をリアルタイム転送する。長距離読取に優れたUHF帯RFIDを使用することによって同種の装置でバーコード技術を使う場合に比べタグの貼付位置を自由に配置できる。また、箱の内側の非可視位置に貼付することも可能となる。
【符号の説明】
【0134】
10 RFIDリーダ
20 アンテナ
30 RFIDタグ
F 静止RFIDタグフィルタ
C コンピュータ装置
【特許請求の範囲】
【請求項1】
複数のRFIDタグと、該複数のRFIDタグからの電波を受信するRFIDリーダを用いて、複数のRFIDタグのうち移動RFIDタグを識別するRFIDタグ移動識別方法において、
前記RFIDリーダによって移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを取得し、一定のパラメータに基づく静止RFIDタグフィルタによって、前記読取った複数のRFIDタグの情報から前記静止RFIDタグを特定し、前記複数のRFIDタグから前記移動RFIDタグを識別可能とするもので、
前記静止RFIDタグフィルタは、以下の(1)乃至(6)の工程の何れかからなる個別静止RFIDタグフィルタを備え、
前記静止RFIDタグフィルタは、複数の前記個別静止RFIDタグフィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別することを特徴とするRFIDタグ移動識別方法;
(1).読取中のタグ枚数を変数とした関数を用いて、秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する工程;
(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;
(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが、谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する工程;
(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の各強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程;
(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;
(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する工程。
【請求項2】
前記(1)における読取中タグ枚数を変数とした関数は、読取中タグ枚数を独立変数とした累乗曲線関数または多項式関数であり、この関数を用い計算した計算値に、所定の割合を乗算した閾値を判断基準として、前記判断基準より秒間読取回数が少ない場合に静止タグと識別することを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項3】
前記各種RFIDタグフィルタを使用しアンテナ近くの水平方向移動のみを検知し遠くの水平方向移動や垂直方向移動は検知しないことを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項4】
前記(5)における時系列分析において、位相の標準偏差の値に閾値を設けること、二項検定、カイ二乗検定、G検定の少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程を備えたことを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項5】
前記一定のパラメータは、予め試験的RFIDタグを移動した後に、移動時の開始点及び終了点を選択することでRFIDリーダやアンテナ、タグ、移動速度といった環境の違いを吸収した前記パラメータを自動で計算することを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項6】
コンピュータ装置に、移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグをRFIDリーダで読取らせた時系列読取データを、一定のパラメータに基づく静止RFIDタグフィルタよって、複数の前記RFIDタグの情報から前記静止RFIDタグを特定させ、前記複数のRFIDタグから前記移動RFIDタグを識別させるものであって、静止RFIDタグフィルタとして、
(1).読取中のタグ枚数を変数とした関数を用いて、秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する手順、
(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、
(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する手順、
(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の各強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する手順、
(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、
(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する手順、
のうち少なくとも一つ以上の手順からなる個別静止RFIDタグフィルタを任意の順でコンピュータ装置に実行させるためのRFIDタグ移動識別プログラム。
【請求項1】
複数のRFIDタグと、該複数のRFIDタグからの電波を受信するRFIDリーダを用いて、複数のRFIDタグのうち移動RFIDタグを識別するRFIDタグ移動識別方法において、
前記RFIDリーダによって移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグの時系列読取データを取得し、一定のパラメータに基づく静止RFIDタグフィルタによって、前記読取った複数のRFIDタグの情報から前記静止RFIDタグを特定し、前記複数のRFIDタグから前記移動RFIDタグを識別可能とするもので、
前記静止RFIDタグフィルタは、以下の(1)乃至(6)の工程の何れかからなる個別静止RFIDタグフィルタを備え、
前記静止RFIDタグフィルタは、複数の前記個別静止RFIDタグフィルタのうち少なくとも一つ以上の個別静止RFIDタグフィルタを用いて静止RFIDタグと移動RFIDタグを識別し、移動RFIDタグを識別することを特徴とするRFIDタグ移動識別方法;
(1).読取中のタグ枚数を変数とした関数を用いて、秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する工程;
(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;
(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが、谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する工程;
(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の各強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程;
(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する工程;
(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する工程。
【請求項2】
前記(1)における読取中タグ枚数を変数とした関数は、読取中タグ枚数を独立変数とした累乗曲線関数または多項式関数であり、この関数を用い計算した計算値に、所定の割合を乗算した閾値を判断基準として、前記判断基準より秒間読取回数が少ない場合に静止タグと識別することを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項3】
前記各種RFIDタグフィルタを使用しアンテナ近くの水平方向移動のみを検知し遠くの水平方向移動や垂直方向移動は検知しないことを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項4】
前記(5)における時系列分析において、位相の標準偏差の値に閾値を設けること、二項検定、カイ二乗検定、G検定の少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する工程を備えたことを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項5】
前記一定のパラメータは、予め試験的RFIDタグを移動した後に、移動時の開始点及び終了点を選択することでRFIDリーダやアンテナ、タグ、移動速度といった環境の違いを吸収した前記パラメータを自動で計算することを特徴とする請求項1記載のRFIDタグ移動識別方法。
【請求項6】
コンピュータ装置に、移動RFIDタグ及び静止RFIDタグを含む複数のRFIDタグをRFIDリーダで読取らせた時系列読取データを、一定のパラメータに基づく静止RFIDタグフィルタよって、複数の前記RFIDタグの情報から前記静止RFIDタグを特定させ、前記複数のRFIDタグから前記移動RFIDタグを識別させるものであって、静止RFIDタグフィルタとして、
(1).読取中のタグ枚数を変数とした関数を用いて、秒間読取可能回数を計算し、前記RFIDリーダによって読み取った秒間読取回数との比較に基づいて識別する手順、
(2).電波受信強度の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、
(3).前記RFIDリーダで読みとられたRFIDタグの電波受信強度時系列データが谷型となる場合、すなわち電波受信強度の高い点発生時に所定の時系列データまで遡り、別の電波受信強度が高い点があるかを判定し、高い点があった場合に静止RFIDタグと判別する手順、
(4).前記RFIDタグの電波受信強度時系列データが示す山型全体、山型の登り部分を線形・非線形曲線として適合する度合い、山型の各強度最大値と最小値の差、山型の時系列で前の点から上昇した点の割合のうち少なくとも一つを用いて静止RFIDタグと移動RFIDタグを識別する手順、
(5).前記RFIDリーダの送信搬送波とRFIDタグからの反射で返却された搬送波の位相の時系列分析によって、静止RFIDタグと移動RFIDタグを識別する手順、
(6).RFIDタグ応答の位相変曲点またはドップラー周波数0時点と電波受信強度山頂発生時点を比較することによって移動方向を識別する手順、
のうち少なくとも一つ以上の手順からなる個別静止RFIDタグフィルタを任意の順でコンピュータ装置に実行させるためのRFIDタグ移動識別プログラム。
【図1】

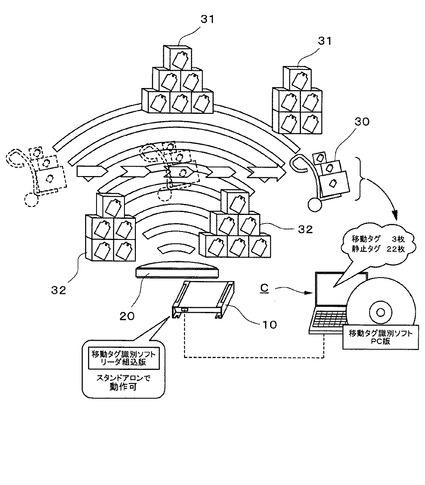
【図2】
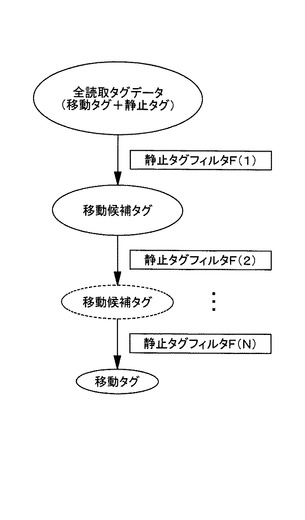
【図3】
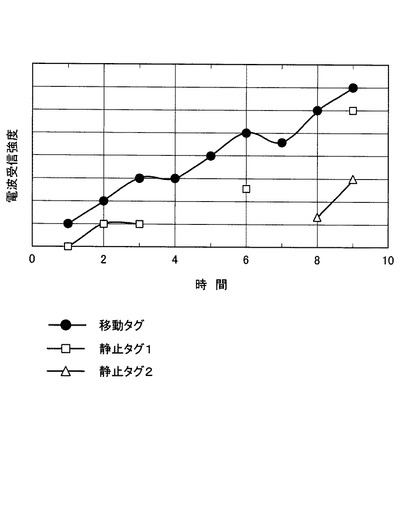
【図4】
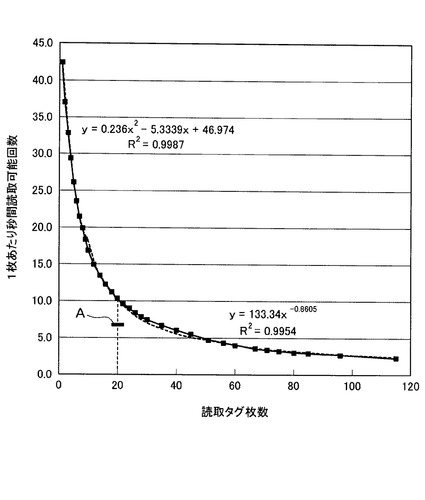
【図5】
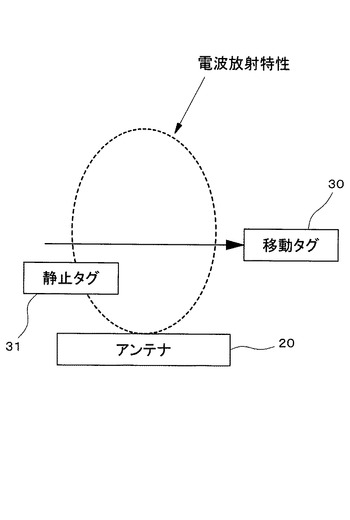
【図6】
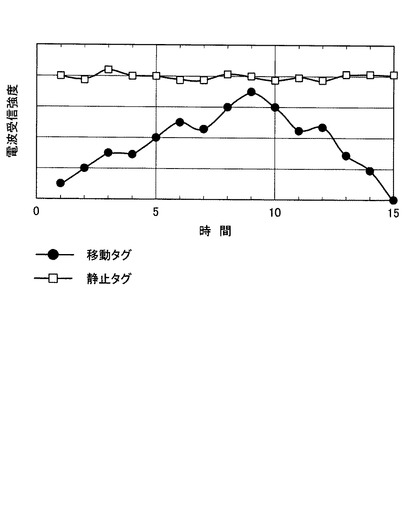
【図7】
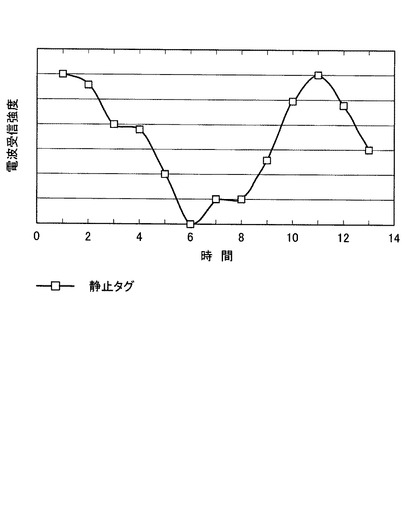
【図8A】
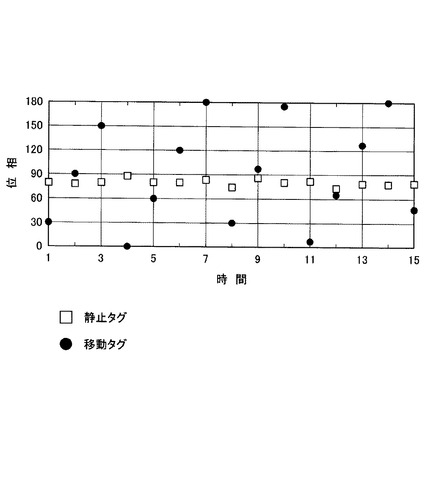
【図8B】
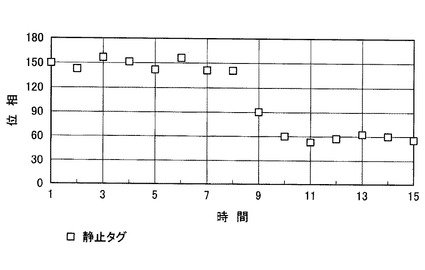
【図8C】
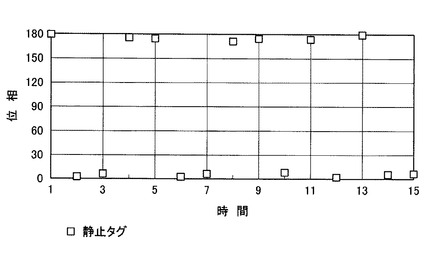
【図9A】
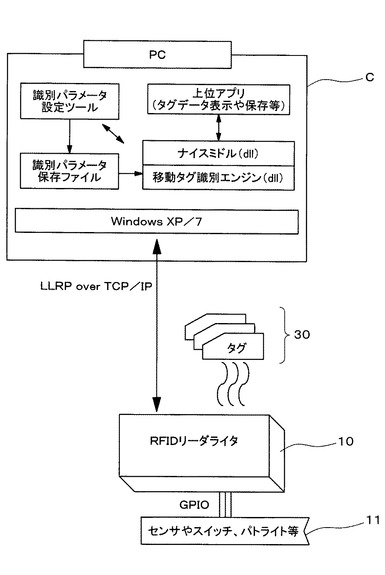
【図9B】
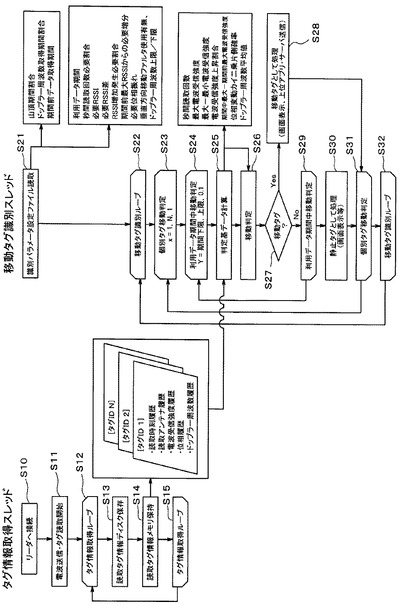
【図9C】
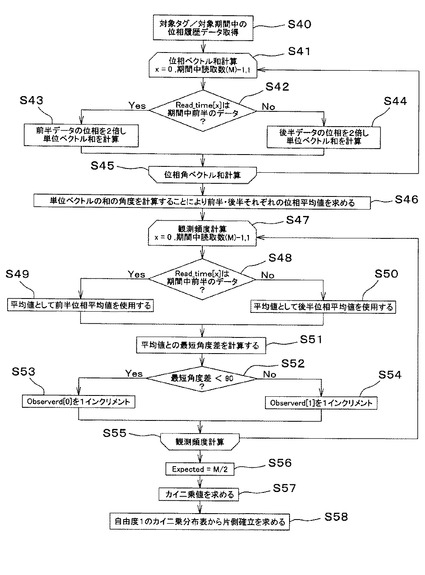
【図10A】
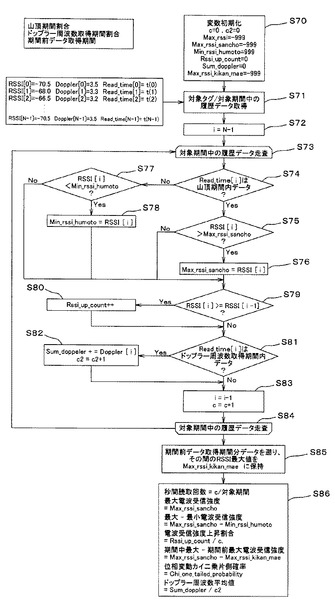
【図10B】
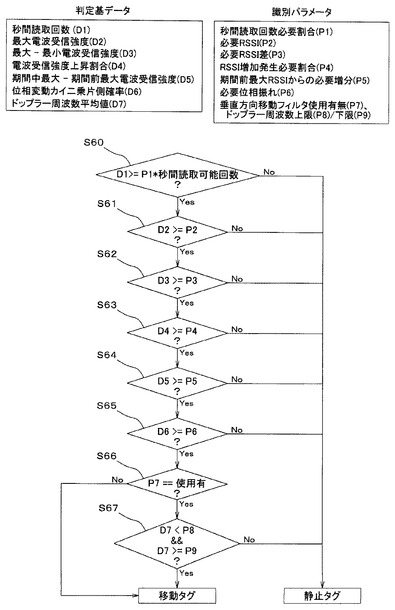
【図11A】
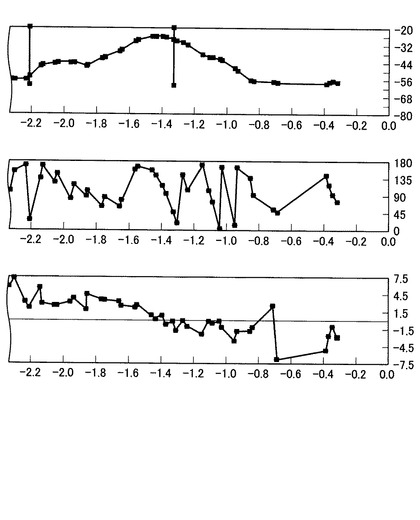
【図11B】
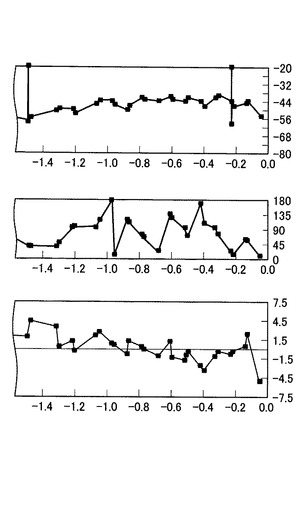
【図12A】
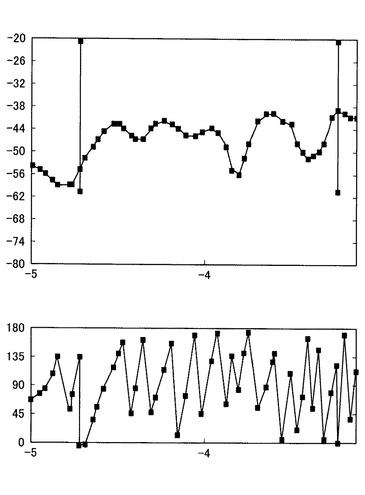
【図12B】
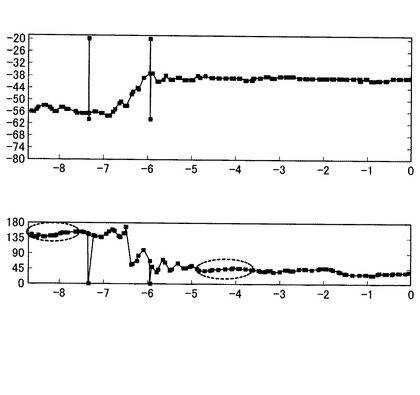
【図12C】
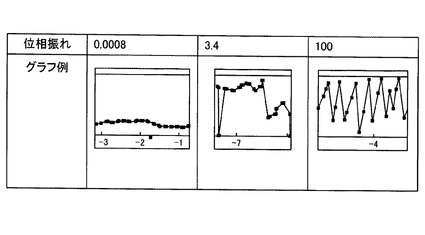
【図13A】
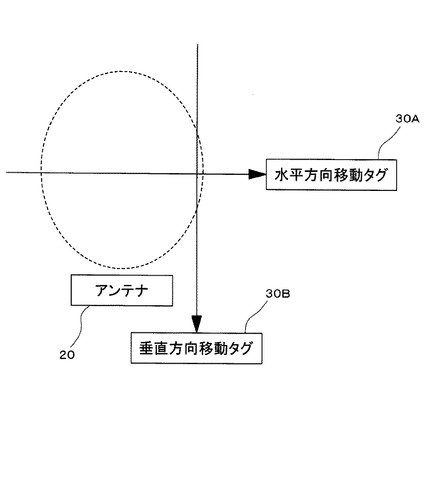
【図13B】
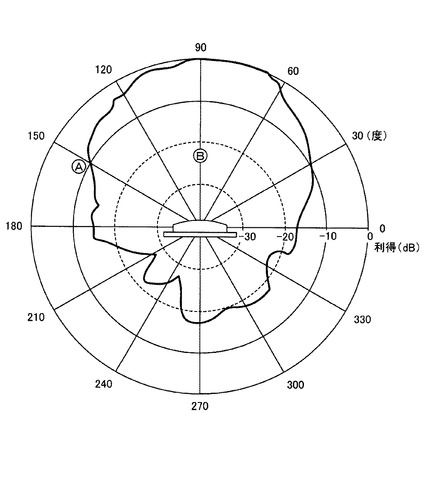
【図13C】
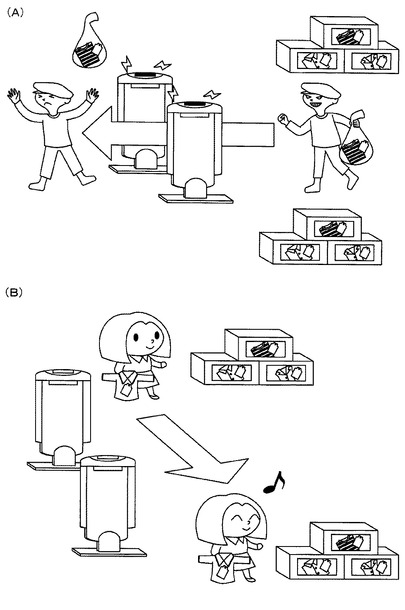
【図14A】
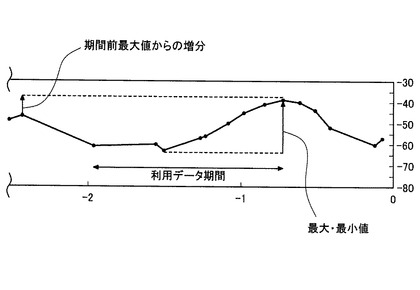
【図14B】
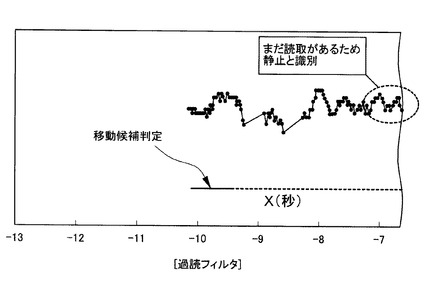
【図15A】
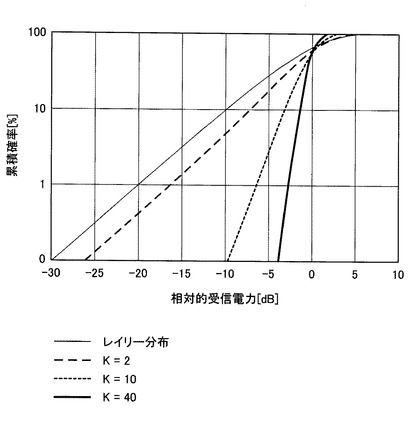
【図15B】
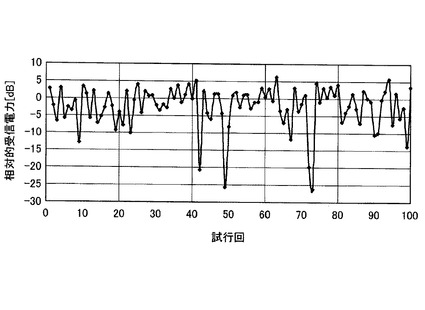
【図16A】
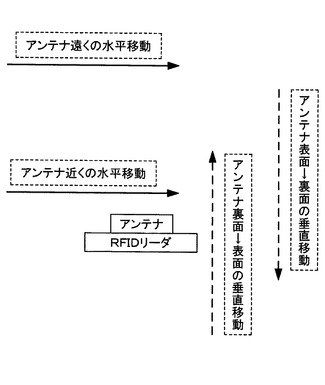
【図16B】
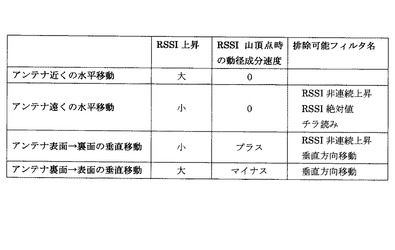
【図16C】
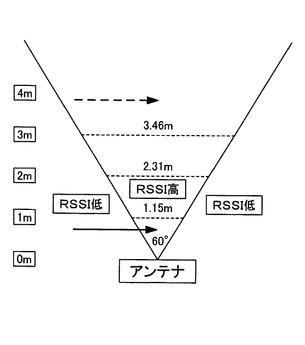
【図16D】
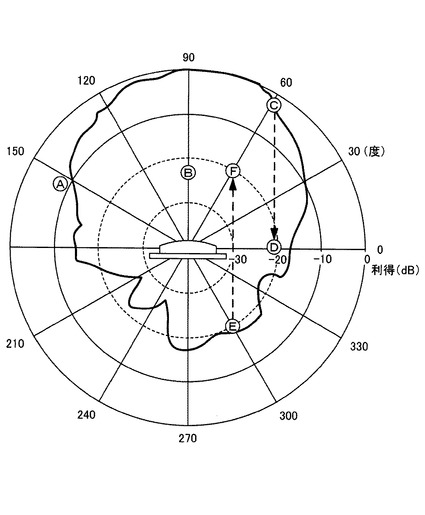
【図17A】
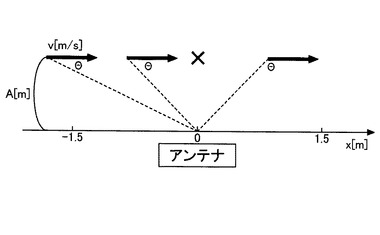
【図17B】
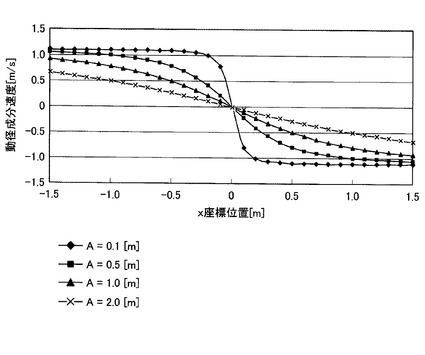
【図17C】
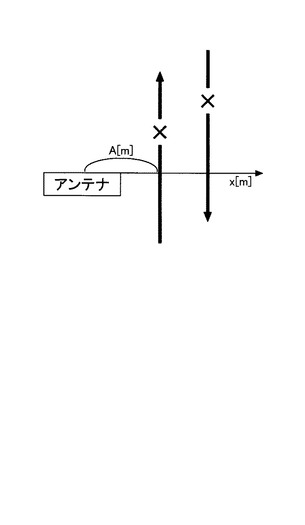
【図27】
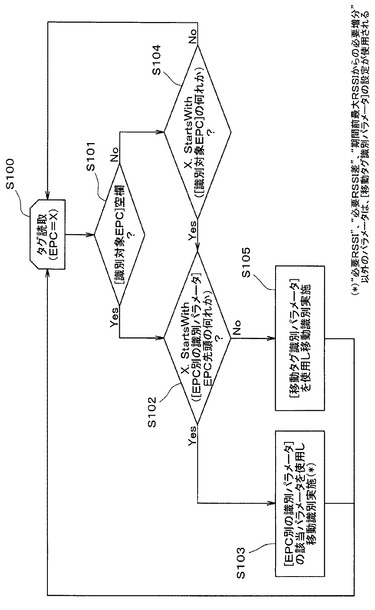
【図28】
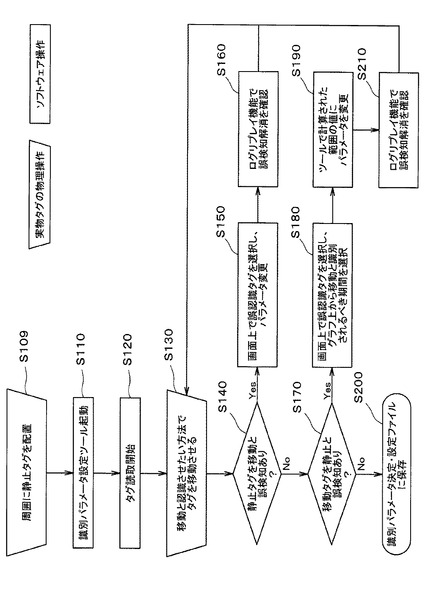
【図29】
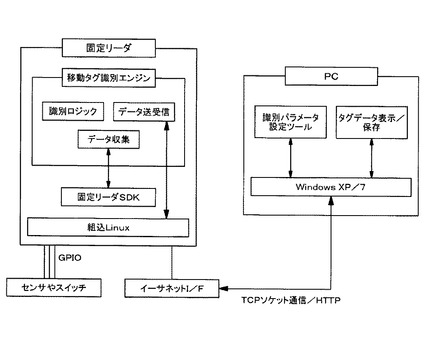
【図30】
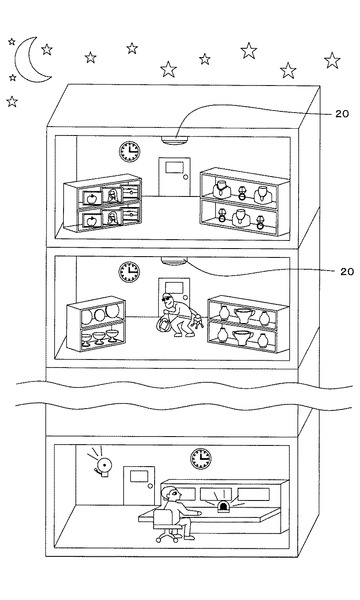
【図31】
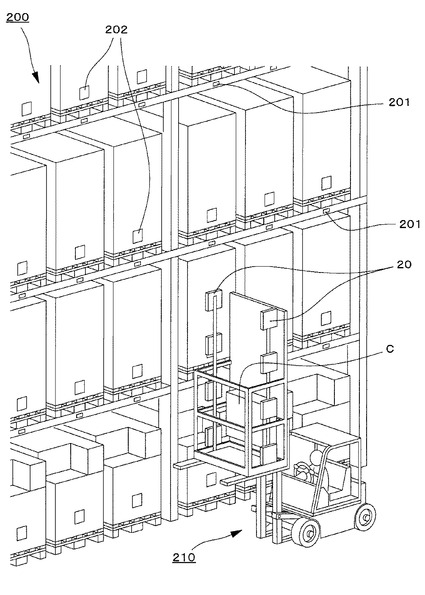
【図18】
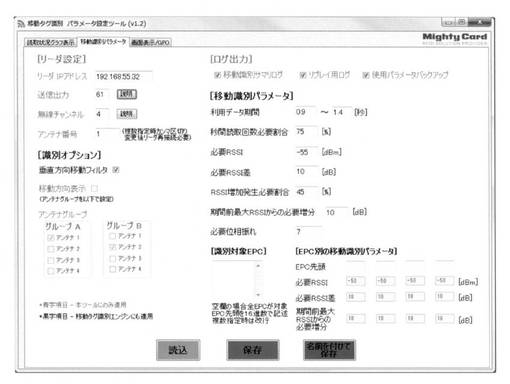
【図19】
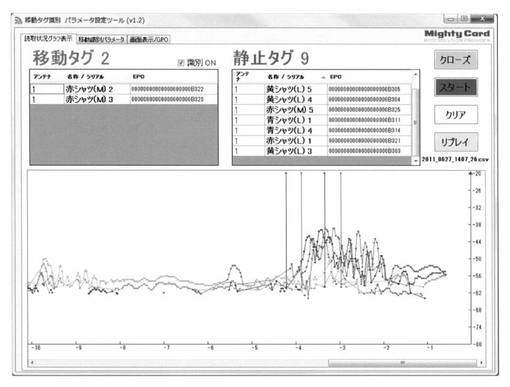
【図20】
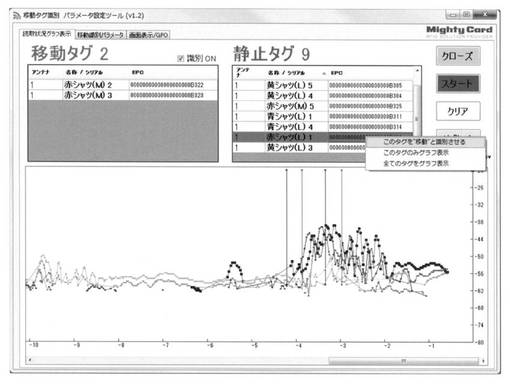
【図21A】
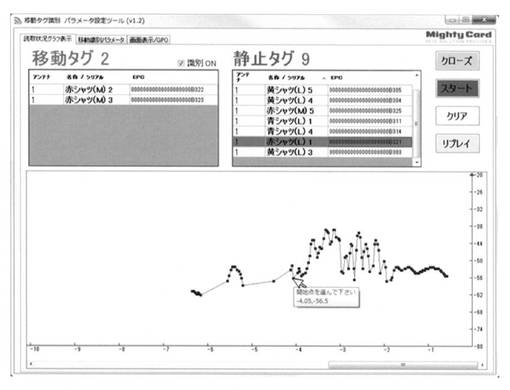
【図21B】
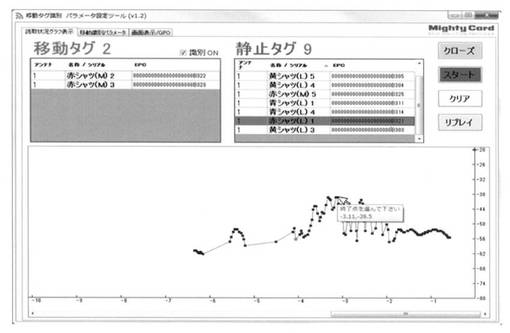
【図22】
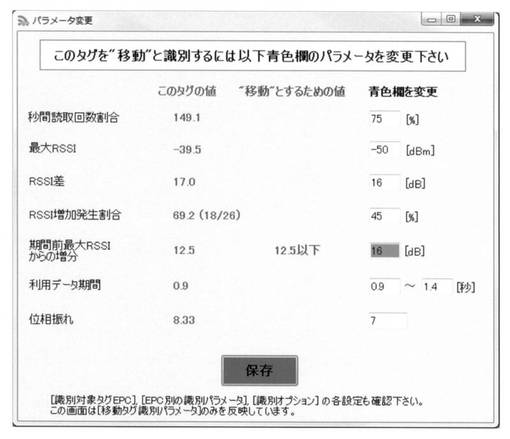
【図23】
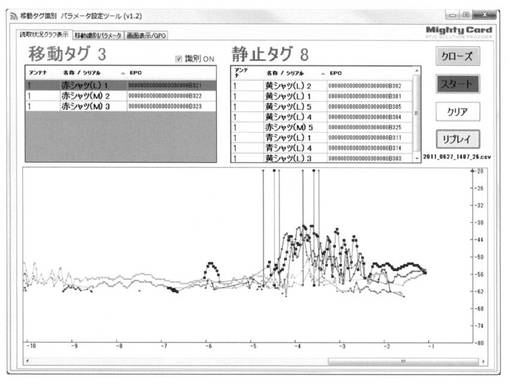
【図24】
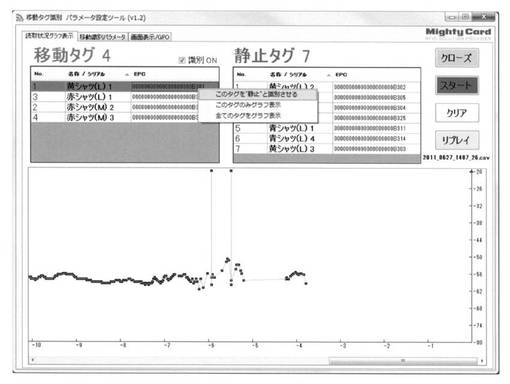
【図25】
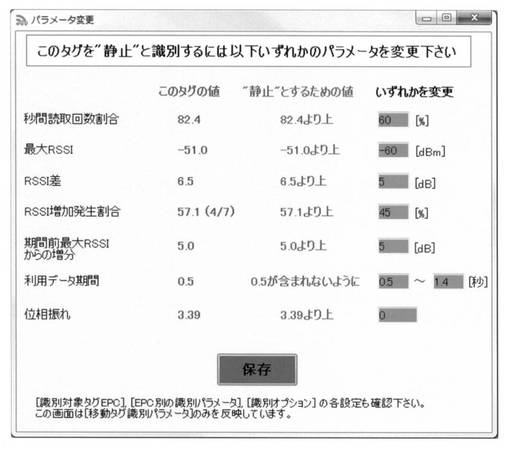
【図26】
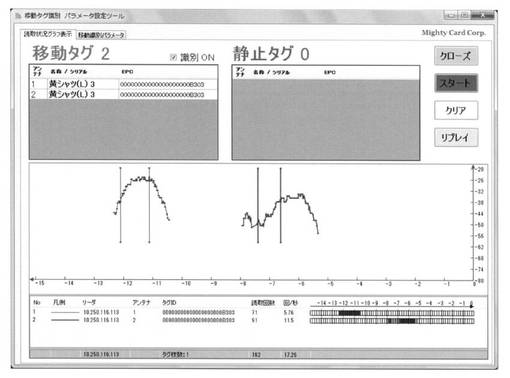
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図9A】
【図9B】
【図9C】
【図10A】
【図10B】
【図11A】
【図11B】
【図12A】
【図12B】
【図12C】
【図13A】
【図13B】
【図13C】
【図14A】
【図14B】
【図15A】
【図15B】
【図16A】
【図16B】
【図16C】
【図16D】
【図17A】
【図17B】
【図17C】
【図27】
【図28】
【図29】
【図30】
【図31】
【図18】
【図19】
【図20】
【図21A】
【図21B】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2013−37663(P2013−37663A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−186974(P2011−186974)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(504385708)マイティカード株式会社 (11)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(504385708)マイティカード株式会社 (11)
【Fターム(参考)】
[ Back to top ]