
RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法
【課題】RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面の変位計測装置を提供する。
【解決手段】基準局1と観測局2からの計測データによりRTK演算部11にて演算された海面位置データをデータ選択部15を介してデータ解析部17に入力し、波浪・潮位・津波を抽出する装置であって、観測局からの計測データにより単独測位方式に基づき変動成分を得る高精度変動検出法を用いて波浪成分を求めるPVD演算部12と、過去のデータに基づき決定された潮位予測式を用いて予測潮位を得る潮位予測部13と、上記海面位置データから波浪成分を減算し且つこの減算値に基づき海面位置データに異常が発生しているか否かを判断する異常判断部16とを具備し、異常があると判断した場合に、実測された海面位置データの代わりに、潮位予測部で予測された異常のない予測潮位をデータ選択部に入力するようにしたもの。
【解決手段】基準局1と観測局2からの計測データによりRTK演算部11にて演算された海面位置データをデータ選択部15を介してデータ解析部17に入力し、波浪・潮位・津波を抽出する装置であって、観測局からの計測データにより単独測位方式に基づき変動成分を得る高精度変動検出法を用いて波浪成分を求めるPVD演算部12と、過去のデータに基づき決定された潮位予測式を用いて予測潮位を得る潮位予測部13と、上記海面位置データから波浪成分を減算し且つこの減算値に基づき海面位置データに異常が発生しているか否かを判断する異常判断部16とを具備し、異常があると判断した場合に、実測された海面位置データの代わりに、潮位予測部で予測された異常のない予測潮位をデータ選択部に入力するようにしたもの。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法に関する。
【背景技術】
【0002】
GPS(Global Positioning System)を利用して、計測対象物(以下、計測点という)の3次元位置をリアルタイムに求める測位方式としてRTK(Real Time kinematic)法があり、海洋観測ブイによる津波・波浪観測にも利用されている。このRTK法は、予め、緯度、経度、高さが分かっている基準点でのGPS衛星からの搬送波位相による計測値を参照しながら、計測点での搬送波位相の計測を行うとともに、基準点に対する計測点の変動成分を求め、計測点の三次元位置を精度良く計測する方法である。このRTK法を用いることにより、リアルタイムで津波・波浪観測が可能となる(非特許文献1参照)。
【非特許文献1】「GPS津波計の開発−大船渡市実用化実験」(電子情報通信学会論文誌Vol.J84-B No.12 December pp2227-2235)(2001年12月)
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上記RTK法は、観測点(計測対象地点)の3次元位置をリアルタイムに決定できる測位方式であり、計測誤差も通常時は数センチメートル程度と極めて高精度である。しかし、電離層や対流圏の影響を強く受けたGPSデータをRTK測位に使用した場合などには、整数値アンビギュイティの確定ミスが発生し、計測値が数センチメートルを超えてジャンプする場合がある。
【0004】
すなわち、通常、RTK法が組み込まれたGPS測位ソフトウェアでは、GPS衛星データや補正データの取得状況などに応じて、フィックス解(FIX解),フロート解(FLOAT解),D−GPS解または単独測位解のいずれかが出力される。フィックス解としてデータ出力された場合が最も精度が良く信頼性も高い。ところが、フィックス解として出力された場合でも、整数値アンビギュイティの確定ミスにより、演算結果に跳躍現象、所謂、ジャンプが生じる可能性がある。
【0005】
また、RTK法によって測位された結果には、短周期の波浪成分が含まれているので、これから津波成分を抽出するためにはローパスフィルタを適用する必要がある。しかし、ジャンプ値すなわち異常値を含んだままのデータにローパスフィルタを適用すれば、恰も津波が到来したかのような波形となり、全くの平静時に津波発生という誤報を発令してしまうという問題がある。
【0006】
そこで、本発明は、RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面変位計測装置および海面変位計測方法を、言い換えれば、RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の請求項1に係るGPSによる変位計測装置は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したものである。
【0008】
また、請求項2に係るGPSによる変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
【0009】
また、請求項3に係るGPSによる変位計測装置は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したものである。
【0010】
さらに、請求項4に係るGPSによる変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
【発明の効果】
【0011】
上記変位計測装置および変位計測方法によると、リアルタイムキネマティック法により求められた海面位置データに対して、単独測位による高精度変動検出法または相対測位による精密変動計測法により求められる波浪成分を減算するとともに、この減算値または減算値の時間変化率に基づき、海面位置データにジャンプなどの異常が生じているか否かを判断し、もし異常であると判断された場合に出力するデータについては、潮位予測部から得られた潮位に波浪成分を加算した正常な予測海面位置データとしたので、データに異常は検出されない。したがって、津波を監視しているような場合に、当該異常データを津波と誤って検出することがないため、津波警報を誤って発令するのを防止することができる。
【発明を実施するための最良の形態】
【0012】
[実施の形態1]
以下、本発明の実施の形態1に係るRTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法[簡単に言うと、GPSによる海面変位計測装置(海面変位計測システムともいえる)および海面変位計測方法]を、図1〜図5に基づき説明する。
【0013】
この海面変位計測装置および海面変位計測方法は、GPS(Global Positioning System:全地球測位システム)を利用して海面変位を、具体的には、波浪・潮位・津波を精度良く計測するもので、基本的には、リアルタイムキネマティック[以下、RTK(Real Time kinematic)という]方式すなわち搬送波位相を用いた相対測位方式(干渉測位方式ともいう)を採用するとともに、PVD法と称する単独精密変動検出法[以下、PVD(Point precise Variance Detection)法といい、高精度変動検出法ともいう(特開2001−147263号公報参照)]を併用している。
【0014】
このPVD法を簡単に説明すれば(詳細は後述する)、観測局からの観測データを入力して単独測位方式を用いて変動成分を得る方法であり、単独測位方式でありながら計測対象物の変位をRTK法と同等の精度で計測し得る方法である。
【0015】
まず、海面変位計測装置の概略構成を図1に基づき説明する。
この海面変位計測装置は、地上に設置された基準GPS受信機(以下、基準局という)1および所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)2にて得られた計測データ(測位データともいう)に基づき、当該所定海域での海面変位を計測するものである。
【0016】
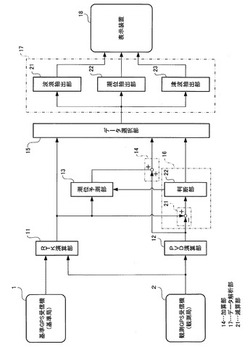
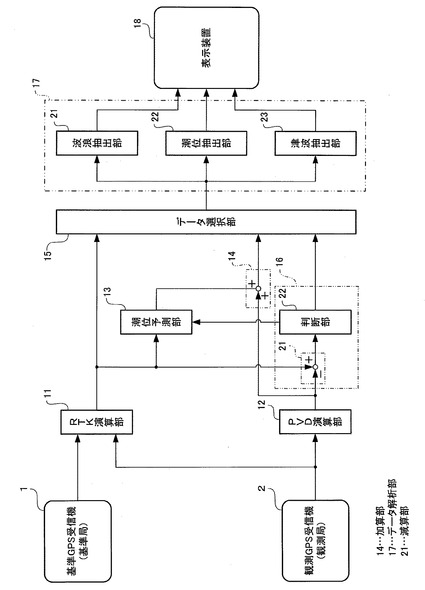
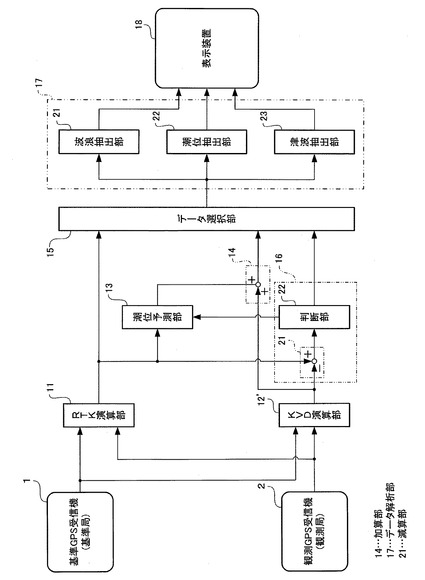
この海面変位計測装置には、基準局1からの基準計測データおよび観測局2からの観測計測データを入力して、RTK法により観測局の海面位置データを求めるRTK演算部(第1演算部)11と、観測局2からの観測計測データを入力してPVD法により波浪成分(短周期成分でもある)である海面変位量を求めるPVD演算部(第2演算部)12と、上記RTK演算部11にて求められた海面位置データ(これには、潮位、波浪、津波の各成分が含まれる)を入力するとともに過去の所定時間分[例えば数十分程度(20〜30分程度)]の海面位置データに基づき決定された潮位予測式、例えば時間を変数とする二次多項式(勿論、一次でも、三次以上でもよいが、二次多項式が最適である)により、先(未来)の時刻における[例えば、1秒間隔(サンプリング間隔でもある)でもって数秒間における]潮位を予測する潮位予測部13と、この潮位予測部13にて求められた予測潮位に上記PVD演算部12で求められた波浪成分(海面変位量)を加算して予測海面位置データ(潮位、波浪成分が含まれる)を求める加算部14と、この加算部14にて求められた予測海面位置データおよび上記RTK演算部11にて求められた実測の海面位置データ(以下、実測海面位置データともいう)を入力するとともにいずれか一方の海面位置データを出力するデータ選択部15と、上記RTK演算部11にて求められた海面位置データおよび上記PVD演算部12にて求められた波浪成分を入力して両者の差である減算値(潮位に相当する)を求めるとともにこの減算値を入力し且つこの減算値に基づきRTK演算部11にて求められた海面位置データが異常であるか否かを判断(検出)する異常判断部(異常検出部ともいえる)16と、上記データ選択部15から出力された海面位置データを入力し海面変位を解析して波浪・潮位・津波の各成分を抽出するデータ解析部17と、このデータ解析部17にて抽出されたデータを例えば画面等に表示する表示装置(具体的には、モニターであり、プリンターであってもよい)18とが具備されている。
【0017】
上記潮位予測部13においては、上述したように、過去の所定時間分(例えば、数十分程度)の海面位置データを用いて潮位予測式である時間を変数とする二次多項式の係数が決定されるとともに、この潮位予測式に先の時刻を代入して例えば1秒間隔でもって数秒先までの潮位が予測される。
【0018】
また、上記異常判断部16は、RTK演算部11にて求められた海面位置データおよびPVD演算部12にて求められた波浪成分を入力して両者の差である減算値(潮位に相当する)を求める減算部21と、この減算部21にて求められた減算値を入力して当該海面位置データが異常(異常測位データ)であるか否かを判断する判断部22とから構成されている。
【0019】
この判断部22においては、過去の数十分(現時点以前の数十分)における減算値のトレンドを表わす減算値近似式(回帰式、また潮位近似式ともいえる)、つまり潮位予測部13における潮位予測式と同様に多数(複数)の減算値により二次多項式(勿論、一次でも、三次以上でもよいが、二次多項式が最適である)が決定されるとともに、この二次多項式である減算値近似式を用いて予測された予測減算値と現在の減算値との差(偏差)が所定の設定値(閾値)を超えた場合に、異常(異常値)が発生していると判断される。つまり、設定値を超えた場合には、海面位置データが何らかの原因、例えば電離層遅延、対流圏遅延などにより、RTK法の演算において整数値アンビギュイティの確定ミスが起こり、データにジャンプ(跳躍現象)が発生しており、異常であると判断される。
【0020】
また、上記判断手法の替わりに、減算値の時間変化率(微分値)を求め、この時間変化率が所定の設定値(閾値)より大きい場合に、異常が発生していると判断するようにしてもよい。
【0021】
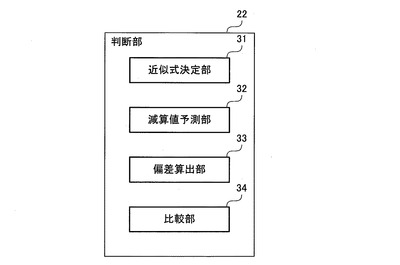
したがって、上記判断部22には、所定時間における複数の減算値を入力して減算値近似式(正確には、二次多項式の係数)を決定する近似式決定部31と、この近似式決定部31にて決定された減算値近似式により先の減算値を予測する減算値予測部32と、この減算値予測部32にて求められた予測減算値と現在の計測データにて求められた実減算値との差(偏差)を求める偏差算出部33と、この偏差算出部33で得られた差を入力して所定の設定値(閾値)と比較し、その海面位置データが異常値であるか否かを判断する比較部34とが具備されている。
【0022】
そして、異常判断部16において異常であると判断された場合、上記潮位予測部13にて用いられる潮位予測式については更新しないようにされている。すなわち、二次多項式の係数を更新しないで予測潮位が求められる。また、異常であると判断された場合には、異常判断部16から、その判断結果が上記データ選択部15に出力され、当該データ選択部15においては、上記加算部14にて求められた予測海面位置データをデータ解析部17に出力するように構成されている。
【0023】
一方、異常判断部16において、異常でなく、つまり正常であると判断された場合には、その判断結果は出力されないようにしている。したがって、この場合でも、潮位予測部13では予測潮位が求められてデータ選択部15に送られているが、データ選択部15においては、RTK演算部11にて求められた実測海面位置データがデータ解析部17に出力される。
【0024】
ここで、PVD演算部12について説明しておく。
PVD演算部12では、3個以上のGPS衛星からの搬送波位相距離データに適切なバンドパスフィルタを適用して得られたフィルタ適用済みの変動量並びに各GPS衛星の方位角および仰角に基づきGPS受信機の三次元座標を未知数とする3個以上の1次方程式を作成し、そしてこの三元1次連立方程式を解くことにより、GPS受信機(観測局に相当する)の三次元座標での変動成分量(変位)すなわち波浪成分である海面変位(X,Y,Z)が求められる。
【0025】
さらに、詳しく説明すると、番号がnのGPS衛星からの搬送波にて得られる変動量Pnは、三次元座標の成分(x,y,z)を用いると、下記(1)式のように表される。
Pn=anx+bny+cnz・・・・(1)
上記(1)式中、
【0026】
【数1】

であり、AznおよびElnは、n番目のGPS衛星の方位角および仰角である。したがって、3個以上のGPS衛星(n=1,2,3,・・・)により、下記(2)式に示す三元1次連立方程式が得られ、この連立方程式を解くことにより、観測局の変位(X,Y,Z)を求めることができる。
【0027】
【数2】
ところで、上記フィルタ適用済みの変動量は、GPS受信機により計測された搬送波位相距離データに対して、風波の周波数帯域分のみを通過させるバンドパスフィルタを適用することにより得られる。
【0028】
次に、上記データ解析部17について説明する。
このデータ解析部17は、データ選択部15にて選択された海面位置データを入力して、波浪を抽出する波浪抽出部41と、潮位を抽出する潮位抽出部42と、津波を抽出する津波抽出部43とから構成されている。
【0029】
上記波浪抽出部41においては、海面位置データにハイパスフィルタ(例えば、FIR型フィルタが用いられる)処理が施され、短周期成分である波浪成分だけが抽出される。
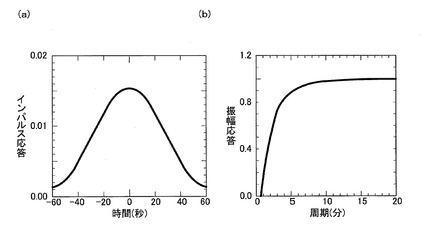
また、上記潮位抽出部42においては、海面位置データにローパスフィルタ処理が施され、波浪成分などの短周期成分が除去されて長周期成分である潮位が抽出される(津波成分については残っている)。このローパスフィルタとしてはFIR型のものが用いられ(計算方法は、重み付きの移動平均に相当する)、波形を歪ませることなく短周期成分を除去することができる。図3(a)および(b)に、用いられるローパスフィルタのインパルス応答と振幅応答を示しておく。
【0030】
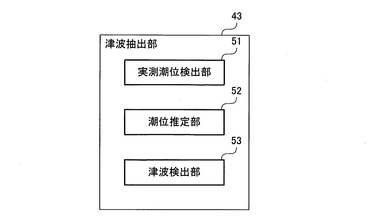
さらに、上記津波抽出部43には、図4に示すように、海面位置データに対してFIR型のローパスフィルタ処理を施し、波浪成分などの短周期成分を除去して実際の潮位(以下、実測潮位という)を得る実測潮位検出部51と、潮位推定式を用いて潮位を推定する潮位推定部52と、上記実測潮位検出部51で得られた実測潮位と潮位推定部52で得られた推定潮位を入力するとともに実測潮位から推定潮位を減算して津波を検出する津波検出部53とが具備されている。すなわち、実測潮位から推定潮位を引くことにより、波浪より周期が長い津波成分を抽出することができる。
【0031】
ここで、潮位推定部52に具備されている潮位推定式について説明しておく。
地球上の或る点(λ,ψ)における潮汐の高さηは、一般に、下記(3)式により表わされる。
【0032】
【数3】
但し、(3)式中、iは分潮の番号(実用上の分潮個数を示す、例えば4〜16が用いられる)、Ai(λ,ψ)は振幅、ωiは角周波数(2π/Ti:Tiは分潮の周期)、θi(λ,ψ)は位相(遅角)を示す。
【0033】
ai=Ai(λ,ψ)・cosθi(λ,ψ),bi=Ai(λ,ψ)・sinθi(λ,ψ)とすると、上記(3)式は下記(4)式のように表わされる。
【0034】
【数4】
ところで、分潮の周波数ωiは既知であり、したがって上記(4)式の左辺に過去の実測海面位置データを代入し最小二乗法を用いることにより、aiおよびbiを求めれば、下記(5)式により振幅および位相を求めることができる。
【0035】
【数5】
この(5)式で求められたAi(λ,ψ)およびθi(λ,ψ)を用いれば、任意の観測時刻における潮位を推定することができる。つまり、波浪成分および津波成分が除去された潮位を求めることができる。したがって、実測海面位置データから推定潮位を減算すれば、津波成分を求めることができる。
【0036】
以下、上述した海面変位計測装置での海面変位計測方法について説明する。
基準局1と観測局2とから計測データを取得するとともに、RTK演算部11では海面位置データが、またPVD演算部12では海面変位量つまり波浪成分がそれぞれ求められる。
【0037】
そして、上記海面位置データと波浪成分とが異常判断部16に入力されて、海面位置データが異常値であるか否かが判断される。すなわち、海面位置データと波浪成分とが減算部21に入力されて差である減算値が求められるとともに、判断部22の近似式決定部31において過去数十分程度の減算値に基づき減算値予測式が決定され(つまり、二次多項式の係数が決定され)た後、減算値予測部32にて上記減算値予測式に基づき予測減算値が求められ、次に偏差算出部33において予測減算値と実際の計測データにより求められた実減算値との差(偏差)が求められ、そしてこの差が比較部34に入力されて所定の設定値と比較される。
【0038】
例えば、減算値同士の差が設定値以下の場合には、海面位置データにジャンプが発生しておらず、正常であると判断される。この場合には、データ選択部15には特別に指示が送られず、したがってRTK演算部11にて求められた実測海面位置データがデータ解析部17にそのまま出力される。
【0039】
一方、減算値同士の差が設定値を超えている場合には、何らかの原因、例えば電離層遅延、対流圏遅延などで海面位置データにジャンプが発生しており、異常であると判断される。
【0040】
そして、海面位置データが異常であると判断されると、その判断結果が潮位予測部13に入力され、潮位予測式が更新されることなく、つまり今まで用いられている潮位予測式により予測潮位が求められる。なお、異常がなくなるまで、更新は行われない。
【0041】
そして、この予測潮位およびPVD演算部12にて求められた波浪成分が加算部14で加算されて得られた予測海面位置データがデータ選択部15に送られ、当該予測海面位置データがデータ解析部17に出力される。
【0042】
このデータ解析部17においては、それぞれの抽出部において、波浪および潮位が抽出される。勿論、津波抽出部43においても津波は抽出されるが、異常であると判断された場合には、長周期成分である津波成分はPVD法により波浪成分を抽出した際に除去されており、海面位置データとして予測潮位を用いるため、津波は抽出されない(但し、海面位置データが異常であるときは津波を検出することはできないが、データの異常状態の継続時間よりも津波の周期の方が長い場合には、異常状態からの復帰後に津波の検出が可能となる)。
【0043】
そして、このデータ解析部17で抽出された波浪・潮位・津波の各データは表示装置18に送られて、画面などに表示される。
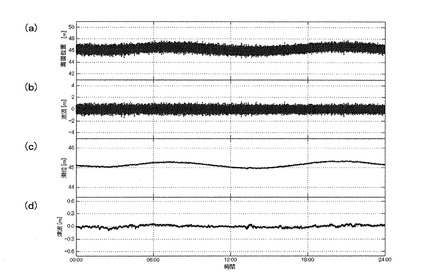
なお、図5にデータの波形図を示しておく。(a)は海面位置データ(GPS測位高度)を、(b)は波浪データを、(c)は潮位データを、(d)は津波データ(この波形には津波が現れていない)を示す。
【0044】
このように、海面位置データに、電離層遅延、対流圏遅延などの外乱によりジャンプなどの異常が発生している場合、RTK法による海面位置データとPVD法による波浪成分とを用いて異常の有無を判断するとともに、異常と判断された場合に、データ解析部に入力するデータとして、実測海面位置データではなく予測海面位置データを用いるようにしたので、データ解析部にて抽出されるデータには異常が検出されない。つまり、異常であるジャンプが津波と誤って検出されるのを防止することができる。
【0045】
より詳しく説明すると、PVD法は、単独測位でありながら計測対象の変位をRTK法と同等の精度で計測できるGPS測位方式であり、例えばハイパスフィルタを用いた場合、そのカットオフ周波数を高くすれば、電離層遅延、対流圏遅延などの影響を受ける長周期成分が除去されて、短周期成分である波浪成分だけが抽出される。
【0046】
そこで、RTK法による実測海面位置データからPVD法による波浪成分を減ずれば、RTK法の演算時に、整数値アンビギュイティの確定ミスが起こり海面位置データにジャンプ(跳躍現象)が発生しているか否かを容易に検出することができ、この場合、過去の海面位置データに基づき予測される海面位置データをデータ解析部に出力するようにしたので、誤って津波であると誤報することを防止することができる。
【0047】
なお、RTK法において、データにジャンプが発生する主な原因は、搬送波位相に電離層遅延や対流圏遅延による長周期の誤差成分が重畳しているからである。これに対して、PVD法では、フィルタ処理(例えば、ハイパスフィルタ処理)によってこれらの長周期の誤差成分が除去されるため、PVD法による計測データにジャンプが発生することはない。
【0048】
ところで、RTK法によって得られる基準局の海面位置データには波浪成分が含まれているため、何も信号処理を行わなければ異常値の検出は不可能である。しかし、RTK法の生データに一般的なローパスフィルタを適用して波浪成分を除去することにより、変動の有無を確認することができるが、変動成分(減算値)そのものが平滑化されるため、ある程度の時間が経過しなければ異常値であると判定できない。分かり易くいうと、瞬時にジャンプがあったとしても、この部分の前後を平滑化(平均化)すると、その変化曲線がある程度の傾斜角を有することになるから、少し時間が経過しないと、ジャンプの有無を判断することができない。よって、リアルタイムでの異常値の検出をすることができない。
【0049】
これに対し、上記実施の形態1では、2つのリアルタイム観測手法(RTK法とPVD法)によるデータの偏差をとっており、その変動成分(源算値である)が平滑化されることが無いため、時間遅れなく瞬時に異常値の検出を行うことができる。また、RTK法による計測データに異常が生じたときに、PVD法による計測データを用いて補完することができるので、観測データの測得率の向上が見込まれる。
【0050】
ここで、上記実施の形態1に係る海面変位計測方法を、ステップ形式で記載すると以下のようになる。
すなわち、この海面変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法により海面位置データを求める第1演算ステップと、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常であると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
[実施の形態2]
次に、本発明の実施の形態2に係るRTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法[GPSによる海面変位計測装置(海面変位計測システム)および海面変位計測方法]を、図6に基づき説明する。
【0051】
上述した実施の形態1においては、PVD法により得られた海面位置データの波浪成分を用いて海面位置データに異常が発生しているか否かを検出するように説明したが、本実施の形態2においては、精密変動計測方法[以下、KVD(Kinematics for precise Variance Detection)法という(特開2001−281323号公報参照)]を用いて波浪成分(波浪データ)を求めるようにしたものである。
【0052】
なお、本実施の形態2の構成と、上記実施の形態1の構成との相違点は、PVD演算部の替わりにKVD演算部を用いたものであり、したがってこれ以外の構成部材については、殆ど同一であるため、同一の構成部材については、実施の形態1で付した部材番号を用いるとともに、この相違部分に着目して説明するものとする。
【0053】
以下、この海面変位計測装置を概略的に説明する。
すなわち、この海面変位計測装置は、基準局1からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法により観測局の海面位置データを求めるRTK演算部(第1演算部)11と、基準局1からの基準計測データおよび観測局2からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により変動成分すなわち波浪成分(短周期成分)である海面変位量を求めるKVD演算部(第2演算部)12′と、上記RTK演算部11にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部13と、この潮位予測部13にて求められた予測潮位に上記KVD演算部12′にて求められた海面変位量を加算する加算部14と、この加算部14にて求められた予測海面位置データおよび上記RTK演算部11にて求められた実測海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部15と、上記RTK演算部11にて求められた実測海面位置データおよび上記KVD演算部12′にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこれら多数(複数)の減算値[または時間変化率(微分値)]に基づきRTK演算部11にて求められた海面位置データが異常であるか否かを判断する異常判断部16とを具備し、且つこの異常判断部16にて異常であると判断された場合に、上記潮位予測部13にて用いられる潮位予測式については更新しないようにされている。すなわち、二次多項式の係数を更新しないで予測潮位が求められ、また異常であると判断された場合に、異常判断部16から、その判断結果が上記データ選択部15に出力されて、上記加算部14にて得られた予測海面位置データを出力するように構成されている。
【0054】
ここで、KVD法を一般的に説明する。
このKVD法は、基準GPS受信機(基準局である)と物体に配置される観測GPS受信機(観測局である)とにおける相対ベクトル(相対変位)を、物体の変動に依存しない長周期変動成分と、物体の変動に依存する短周期変動成分とに分けるとともに、短周期変動成分を、基準GPS受信機からGPS衛星に向かう単位ベクトルの各x,y,z軸成分にて表し、少なくとも3個のGPS衛星と各GPS受信機との間の搬送波位相を計測するとともに、この計測データをバンドパスフィルタに通して、相対ベクトルの短周期変動成分に相当する短周期位相成分を抽出し、この短周期位相成分について、各GPS受信機と各GPS衛星との間の受信機間一重差を少なくとも3個求めるとともに、これら少なくとも3個の受信機間一重差に基づき相対ベクトルの短周期変動成分の各軸成分を演算により求めて物体の変位を計測する方法である。
【0055】
以下、少し詳しく説明する。
まず、基準GPS受信機と観測GPS受信機との間の下記(6)式に示す相対ベクトル(相対位置ベクトル、相対変位ベクトルともいう)Δ*r(なお、*の記号は、それに続く記号がベクトルであることを示している。但し、式中においては、太字で示している。以下、同じ。)を、下記(7)式および(8)式に示すように、物体(観測点)の変動に依存しない長周期変動成分Δ*rL(Lの記号で長周期分を示し、式中では、∧のハットの記号で示す。以下、同じ。)と、物体の変動に依存する短周期変動成分Δ*rS(Sの記号で短周期分を示し、式中では、〜の波の記号で示す。以下、同じ。)とに分け、各成分を表示すると、下記(9)式のようになる。また、式中、x,y,zは、測地座標系でのx座標,y座標,z座標を示し、添え字の数字1は観測GPS受信機、数字0は基準GPS受信機を示す。
【0056】
【数6】
上記(9)式を距離ρについての受信機間一重差を求める下記(10)式に代入すると、下記(11)式が得られる。
【0057】
【数7】
(Δρ)01iの短周期変動成分を(ΔρS)01i(t)とすると下記(12)式が求められる。
【0058】
【数8】
ところで、衛星に起因する誤差が少ない場合には,搬送波位相の受信機間一重差(Δφ)01iの短周期変動成分である短周期位相成分を(ΔφS)01i(t)とすると、(ΔN)01iは時間的に変動しない(Nは整数値アンビギュイティを示す)、すなわち物体の変動に依存しない長周期変動成分であるので、下記(13)式が成立する。
【0059】
【数9】
したがって、3個以上の衛星情報から3個以上の短周期位相成分(ΔφS)01i(t)が得られれば,3個の(12)式を得ることができ、従って相対ベクトルの短周期変動成分ΔrS(t)=(ΔxS01i(t),ΔyS01i(t),ΔzS01i(t))を決定することができる。
【0060】
この搬送波位相φの時間的に変動する成分、すなわち物体の変動に依存する短周期位相成分φSαi(t);(α=0,1)は,生の観測値φαiに、所定のバンドパスフィルタをかけることにより求めることができる。
【0061】
すなわち、バンドパスフィルタを通過した搬送波位相の時間変動成分である短周期位相成分φSに基づき、観測受信機が設けられた物体の変位を計測することができる。
海面変位計測方法については、実施の形態1にて説明したものと同一であるため、その説明を省略する。
【0062】
なお、上述した実施の形態1との相違点は、PVD演算部の替わりに、KVD演算部を用いただけであり、しかも、両演算部で求めるデータとしても、同じ波浪成分のデータであるため、実施の形態1に係る効果と同様の効果が得られる。
【0063】
すなわち、実施の形態2に係る海面変位計測装置および海面変位計測方法によると、RTK法により求められた海面位置データに対して、単独測位方式によるPVD法または相対測位方式によるKVD法により求められる波浪成分を減算するとともに、この減算値または減算値の時間変化率(微分値)に基づき、海面位置データにジャンプなどの異常(異常測位データ)が生じているか否かを判断し、もし異常であると判断された場合に出力するデータについては、潮位予測部から得られた潮位に波浪成分を加算した正常な予測海面位置データとしたので、データに異常は検出されない。したがって、津波を監視しているような場合に、当該異常データを津波と誤って検出することがないため、津波警報を誤って発令するのを防止することができる。
【0064】
ここで、上記実施の形態2に係る海面変位計測方法を、ステップ形式で記載すると以下のようになる。
すなわち、この海面変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法により海面位置データを求める第1演算ステップと、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常であると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
【図面の簡単な説明】
【0065】
【図1】本発明の実施の形態1に係る変位計測装置の概略構成を示すブロック図である。
【図2】同変位計測装置の異常判断部における判断部の概略構成を示すブロック図である。
【図3】同変位計測装置の潮位抽出部にて用いられるローパスフィルタの特性図で、(a)はインパルス応答、(b)は振幅応答を示す。
【図4】同変位計測装置のデータ解析部における津波抽出部の概略構成を示すブロック図である。
【図5】同変位計測装置にて計測または抽出される波形データの図で、(a)はRTK法により求められた海面位置データ、(b)は波浪、(c)は潮位、(d)は津波を示す。
【図6】本発明の実施の形態2に係る変位計測装置の概略構成を示すブロック図である。
【符号の説明】
【0066】
1 基準GPS受信機
2 観測GPS受信機
11 RTK演算部
12 PVD演算部
12′ KVD演算部
13 潮位予測部
14 加算部
15 データ選択部
16 異常判断部
17 データ選択部
21 減算部
22 判断部
41 津波抽出部
42 潮位抽出部
43 津波抽出部
51 実測潮位検出部
52 潮位推定部
53 津波検出部
【技術分野】
【0001】
本発明は、RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法に関する。
【背景技術】
【0002】
GPS(Global Positioning System)を利用して、計測対象物(以下、計測点という)の3次元位置をリアルタイムに求める測位方式としてRTK(Real Time kinematic)法があり、海洋観測ブイによる津波・波浪観測にも利用されている。このRTK法は、予め、緯度、経度、高さが分かっている基準点でのGPS衛星からの搬送波位相による計測値を参照しながら、計測点での搬送波位相の計測を行うとともに、基準点に対する計測点の変動成分を求め、計測点の三次元位置を精度良く計測する方法である。このRTK法を用いることにより、リアルタイムで津波・波浪観測が可能となる(非特許文献1参照)。
【非特許文献1】「GPS津波計の開発−大船渡市実用化実験」(電子情報通信学会論文誌Vol.J84-B No.12 December pp2227-2235)(2001年12月)
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上記RTK法は、観測点(計測対象地点)の3次元位置をリアルタイムに決定できる測位方式であり、計測誤差も通常時は数センチメートル程度と極めて高精度である。しかし、電離層や対流圏の影響を強く受けたGPSデータをRTK測位に使用した場合などには、整数値アンビギュイティの確定ミスが発生し、計測値が数センチメートルを超えてジャンプする場合がある。
【0004】
すなわち、通常、RTK法が組み込まれたGPS測位ソフトウェアでは、GPS衛星データや補正データの取得状況などに応じて、フィックス解(FIX解),フロート解(FLOAT解),D−GPS解または単独測位解のいずれかが出力される。フィックス解としてデータ出力された場合が最も精度が良く信頼性も高い。ところが、フィックス解として出力された場合でも、整数値アンビギュイティの確定ミスにより、演算結果に跳躍現象、所謂、ジャンプが生じる可能性がある。
【0005】
また、RTK法によって測位された結果には、短周期の波浪成分が含まれているので、これから津波成分を抽出するためにはローパスフィルタを適用する必要がある。しかし、ジャンプ値すなわち異常値を含んだままのデータにローパスフィルタを適用すれば、恰も津波が到来したかのような波形となり、全くの平静時に津波発生という誤報を発令してしまうという問題がある。
【0006】
そこで、本発明は、RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面変位計測装置および海面変位計測方法を、言い換えれば、RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の請求項1に係るGPSによる変位計測装置は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したものである。
【0008】
また、請求項2に係るGPSによる変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
【0009】
また、請求項3に係るGPSによる変位計測装置は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したものである。
【0010】
さらに、請求項4に係るGPSによる変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
【発明の効果】
【0011】
上記変位計測装置および変位計測方法によると、リアルタイムキネマティック法により求められた海面位置データに対して、単独測位による高精度変動検出法または相対測位による精密変動計測法により求められる波浪成分を減算するとともに、この減算値または減算値の時間変化率に基づき、海面位置データにジャンプなどの異常が生じているか否かを判断し、もし異常であると判断された場合に出力するデータについては、潮位予測部から得られた潮位に波浪成分を加算した正常な予測海面位置データとしたので、データに異常は検出されない。したがって、津波を監視しているような場合に、当該異常データを津波と誤って検出することがないため、津波警報を誤って発令するのを防止することができる。
【発明を実施するための最良の形態】
【0012】
[実施の形態1]
以下、本発明の実施の形態1に係るRTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法[簡単に言うと、GPSによる海面変位計測装置(海面変位計測システムともいえる)および海面変位計測方法]を、図1〜図5に基づき説明する。
【0013】
この海面変位計測装置および海面変位計測方法は、GPS(Global Positioning System:全地球測位システム)を利用して海面変位を、具体的には、波浪・潮位・津波を精度良く計測するもので、基本的には、リアルタイムキネマティック[以下、RTK(Real Time kinematic)という]方式すなわち搬送波位相を用いた相対測位方式(干渉測位方式ともいう)を採用するとともに、PVD法と称する単独精密変動検出法[以下、PVD(Point precise Variance Detection)法といい、高精度変動検出法ともいう(特開2001−147263号公報参照)]を併用している。
【0014】
このPVD法を簡単に説明すれば(詳細は後述する)、観測局からの観測データを入力して単独測位方式を用いて変動成分を得る方法であり、単独測位方式でありながら計測対象物の変位をRTK法と同等の精度で計測し得る方法である。
【0015】
まず、海面変位計測装置の概略構成を図1に基づき説明する。
この海面変位計測装置は、地上に設置された基準GPS受信機(以下、基準局という)1および所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)2にて得られた計測データ(測位データともいう)に基づき、当該所定海域での海面変位を計測するものである。
【0016】
この海面変位計測装置には、基準局1からの基準計測データおよび観測局2からの観測計測データを入力して、RTK法により観測局の海面位置データを求めるRTK演算部(第1演算部)11と、観測局2からの観測計測データを入力してPVD法により波浪成分(短周期成分でもある)である海面変位量を求めるPVD演算部(第2演算部)12と、上記RTK演算部11にて求められた海面位置データ(これには、潮位、波浪、津波の各成分が含まれる)を入力するとともに過去の所定時間分[例えば数十分程度(20〜30分程度)]の海面位置データに基づき決定された潮位予測式、例えば時間を変数とする二次多項式(勿論、一次でも、三次以上でもよいが、二次多項式が最適である)により、先(未来)の時刻における[例えば、1秒間隔(サンプリング間隔でもある)でもって数秒間における]潮位を予測する潮位予測部13と、この潮位予測部13にて求められた予測潮位に上記PVD演算部12で求められた波浪成分(海面変位量)を加算して予測海面位置データ(潮位、波浪成分が含まれる)を求める加算部14と、この加算部14にて求められた予測海面位置データおよび上記RTK演算部11にて求められた実測の海面位置データ(以下、実測海面位置データともいう)を入力するとともにいずれか一方の海面位置データを出力するデータ選択部15と、上記RTK演算部11にて求められた海面位置データおよび上記PVD演算部12にて求められた波浪成分を入力して両者の差である減算値(潮位に相当する)を求めるとともにこの減算値を入力し且つこの減算値に基づきRTK演算部11にて求められた海面位置データが異常であるか否かを判断(検出)する異常判断部(異常検出部ともいえる)16と、上記データ選択部15から出力された海面位置データを入力し海面変位を解析して波浪・潮位・津波の各成分を抽出するデータ解析部17と、このデータ解析部17にて抽出されたデータを例えば画面等に表示する表示装置(具体的には、モニターであり、プリンターであってもよい)18とが具備されている。
【0017】
上記潮位予測部13においては、上述したように、過去の所定時間分(例えば、数十分程度)の海面位置データを用いて潮位予測式である時間を変数とする二次多項式の係数が決定されるとともに、この潮位予測式に先の時刻を代入して例えば1秒間隔でもって数秒先までの潮位が予測される。
【0018】
また、上記異常判断部16は、RTK演算部11にて求められた海面位置データおよびPVD演算部12にて求められた波浪成分を入力して両者の差である減算値(潮位に相当する)を求める減算部21と、この減算部21にて求められた減算値を入力して当該海面位置データが異常(異常測位データ)であるか否かを判断する判断部22とから構成されている。
【0019】
この判断部22においては、過去の数十分(現時点以前の数十分)における減算値のトレンドを表わす減算値近似式(回帰式、また潮位近似式ともいえる)、つまり潮位予測部13における潮位予測式と同様に多数(複数)の減算値により二次多項式(勿論、一次でも、三次以上でもよいが、二次多項式が最適である)が決定されるとともに、この二次多項式である減算値近似式を用いて予測された予測減算値と現在の減算値との差(偏差)が所定の設定値(閾値)を超えた場合に、異常(異常値)が発生していると判断される。つまり、設定値を超えた場合には、海面位置データが何らかの原因、例えば電離層遅延、対流圏遅延などにより、RTK法の演算において整数値アンビギュイティの確定ミスが起こり、データにジャンプ(跳躍現象)が発生しており、異常であると判断される。
【0020】
また、上記判断手法の替わりに、減算値の時間変化率(微分値)を求め、この時間変化率が所定の設定値(閾値)より大きい場合に、異常が発生していると判断するようにしてもよい。
【0021】
したがって、上記判断部22には、所定時間における複数の減算値を入力して減算値近似式(正確には、二次多項式の係数)を決定する近似式決定部31と、この近似式決定部31にて決定された減算値近似式により先の減算値を予測する減算値予測部32と、この減算値予測部32にて求められた予測減算値と現在の計測データにて求められた実減算値との差(偏差)を求める偏差算出部33と、この偏差算出部33で得られた差を入力して所定の設定値(閾値)と比較し、その海面位置データが異常値であるか否かを判断する比較部34とが具備されている。
【0022】
そして、異常判断部16において異常であると判断された場合、上記潮位予測部13にて用いられる潮位予測式については更新しないようにされている。すなわち、二次多項式の係数を更新しないで予測潮位が求められる。また、異常であると判断された場合には、異常判断部16から、その判断結果が上記データ選択部15に出力され、当該データ選択部15においては、上記加算部14にて求められた予測海面位置データをデータ解析部17に出力するように構成されている。
【0023】
一方、異常判断部16において、異常でなく、つまり正常であると判断された場合には、その判断結果は出力されないようにしている。したがって、この場合でも、潮位予測部13では予測潮位が求められてデータ選択部15に送られているが、データ選択部15においては、RTK演算部11にて求められた実測海面位置データがデータ解析部17に出力される。
【0024】
ここで、PVD演算部12について説明しておく。
PVD演算部12では、3個以上のGPS衛星からの搬送波位相距離データに適切なバンドパスフィルタを適用して得られたフィルタ適用済みの変動量並びに各GPS衛星の方位角および仰角に基づきGPS受信機の三次元座標を未知数とする3個以上の1次方程式を作成し、そしてこの三元1次連立方程式を解くことにより、GPS受信機(観測局に相当する)の三次元座標での変動成分量(変位)すなわち波浪成分である海面変位(X,Y,Z)が求められる。
【0025】
さらに、詳しく説明すると、番号がnのGPS衛星からの搬送波にて得られる変動量Pnは、三次元座標の成分(x,y,z)を用いると、下記(1)式のように表される。
Pn=anx+bny+cnz・・・・(1)
上記(1)式中、
【0026】
【数1】
であり、AznおよびElnは、n番目のGPS衛星の方位角および仰角である。したがって、3個以上のGPS衛星(n=1,2,3,・・・)により、下記(2)式に示す三元1次連立方程式が得られ、この連立方程式を解くことにより、観測局の変位(X,Y,Z)を求めることができる。
【0027】
【数2】
ところで、上記フィルタ適用済みの変動量は、GPS受信機により計測された搬送波位相距離データに対して、風波の周波数帯域分のみを通過させるバンドパスフィルタを適用することにより得られる。
【0028】
次に、上記データ解析部17について説明する。
このデータ解析部17は、データ選択部15にて選択された海面位置データを入力して、波浪を抽出する波浪抽出部41と、潮位を抽出する潮位抽出部42と、津波を抽出する津波抽出部43とから構成されている。
【0029】
上記波浪抽出部41においては、海面位置データにハイパスフィルタ(例えば、FIR型フィルタが用いられる)処理が施され、短周期成分である波浪成分だけが抽出される。
また、上記潮位抽出部42においては、海面位置データにローパスフィルタ処理が施され、波浪成分などの短周期成分が除去されて長周期成分である潮位が抽出される(津波成分については残っている)。このローパスフィルタとしてはFIR型のものが用いられ(計算方法は、重み付きの移動平均に相当する)、波形を歪ませることなく短周期成分を除去することができる。図3(a)および(b)に、用いられるローパスフィルタのインパルス応答と振幅応答を示しておく。
【0030】
さらに、上記津波抽出部43には、図4に示すように、海面位置データに対してFIR型のローパスフィルタ処理を施し、波浪成分などの短周期成分を除去して実際の潮位(以下、実測潮位という)を得る実測潮位検出部51と、潮位推定式を用いて潮位を推定する潮位推定部52と、上記実測潮位検出部51で得られた実測潮位と潮位推定部52で得られた推定潮位を入力するとともに実測潮位から推定潮位を減算して津波を検出する津波検出部53とが具備されている。すなわち、実測潮位から推定潮位を引くことにより、波浪より周期が長い津波成分を抽出することができる。
【0031】
ここで、潮位推定部52に具備されている潮位推定式について説明しておく。
地球上の或る点(λ,ψ)における潮汐の高さηは、一般に、下記(3)式により表わされる。
【0032】
【数3】
但し、(3)式中、iは分潮の番号(実用上の分潮個数を示す、例えば4〜16が用いられる)、Ai(λ,ψ)は振幅、ωiは角周波数(2π/Ti:Tiは分潮の周期)、θi(λ,ψ)は位相(遅角)を示す。
【0033】
ai=Ai(λ,ψ)・cosθi(λ,ψ),bi=Ai(λ,ψ)・sinθi(λ,ψ)とすると、上記(3)式は下記(4)式のように表わされる。
【0034】
【数4】
ところで、分潮の周波数ωiは既知であり、したがって上記(4)式の左辺に過去の実測海面位置データを代入し最小二乗法を用いることにより、aiおよびbiを求めれば、下記(5)式により振幅および位相を求めることができる。
【0035】
【数5】
この(5)式で求められたAi(λ,ψ)およびθi(λ,ψ)を用いれば、任意の観測時刻における潮位を推定することができる。つまり、波浪成分および津波成分が除去された潮位を求めることができる。したがって、実測海面位置データから推定潮位を減算すれば、津波成分を求めることができる。
【0036】
以下、上述した海面変位計測装置での海面変位計測方法について説明する。
基準局1と観測局2とから計測データを取得するとともに、RTK演算部11では海面位置データが、またPVD演算部12では海面変位量つまり波浪成分がそれぞれ求められる。
【0037】
そして、上記海面位置データと波浪成分とが異常判断部16に入力されて、海面位置データが異常値であるか否かが判断される。すなわち、海面位置データと波浪成分とが減算部21に入力されて差である減算値が求められるとともに、判断部22の近似式決定部31において過去数十分程度の減算値に基づき減算値予測式が決定され(つまり、二次多項式の係数が決定され)た後、減算値予測部32にて上記減算値予測式に基づき予測減算値が求められ、次に偏差算出部33において予測減算値と実際の計測データにより求められた実減算値との差(偏差)が求められ、そしてこの差が比較部34に入力されて所定の設定値と比較される。
【0038】
例えば、減算値同士の差が設定値以下の場合には、海面位置データにジャンプが発生しておらず、正常であると判断される。この場合には、データ選択部15には特別に指示が送られず、したがってRTK演算部11にて求められた実測海面位置データがデータ解析部17にそのまま出力される。
【0039】
一方、減算値同士の差が設定値を超えている場合には、何らかの原因、例えば電離層遅延、対流圏遅延などで海面位置データにジャンプが発生しており、異常であると判断される。
【0040】
そして、海面位置データが異常であると判断されると、その判断結果が潮位予測部13に入力され、潮位予測式が更新されることなく、つまり今まで用いられている潮位予測式により予測潮位が求められる。なお、異常がなくなるまで、更新は行われない。
【0041】
そして、この予測潮位およびPVD演算部12にて求められた波浪成分が加算部14で加算されて得られた予測海面位置データがデータ選択部15に送られ、当該予測海面位置データがデータ解析部17に出力される。
【0042】
このデータ解析部17においては、それぞれの抽出部において、波浪および潮位が抽出される。勿論、津波抽出部43においても津波は抽出されるが、異常であると判断された場合には、長周期成分である津波成分はPVD法により波浪成分を抽出した際に除去されており、海面位置データとして予測潮位を用いるため、津波は抽出されない(但し、海面位置データが異常であるときは津波を検出することはできないが、データの異常状態の継続時間よりも津波の周期の方が長い場合には、異常状態からの復帰後に津波の検出が可能となる)。
【0043】
そして、このデータ解析部17で抽出された波浪・潮位・津波の各データは表示装置18に送られて、画面などに表示される。
なお、図5にデータの波形図を示しておく。(a)は海面位置データ(GPS測位高度)を、(b)は波浪データを、(c)は潮位データを、(d)は津波データ(この波形には津波が現れていない)を示す。
【0044】
このように、海面位置データに、電離層遅延、対流圏遅延などの外乱によりジャンプなどの異常が発生している場合、RTK法による海面位置データとPVD法による波浪成分とを用いて異常の有無を判断するとともに、異常と判断された場合に、データ解析部に入力するデータとして、実測海面位置データではなく予測海面位置データを用いるようにしたので、データ解析部にて抽出されるデータには異常が検出されない。つまり、異常であるジャンプが津波と誤って検出されるのを防止することができる。
【0045】
より詳しく説明すると、PVD法は、単独測位でありながら計測対象の変位をRTK法と同等の精度で計測できるGPS測位方式であり、例えばハイパスフィルタを用いた場合、そのカットオフ周波数を高くすれば、電離層遅延、対流圏遅延などの影響を受ける長周期成分が除去されて、短周期成分である波浪成分だけが抽出される。
【0046】
そこで、RTK法による実測海面位置データからPVD法による波浪成分を減ずれば、RTK法の演算時に、整数値アンビギュイティの確定ミスが起こり海面位置データにジャンプ(跳躍現象)が発生しているか否かを容易に検出することができ、この場合、過去の海面位置データに基づき予測される海面位置データをデータ解析部に出力するようにしたので、誤って津波であると誤報することを防止することができる。
【0047】
なお、RTK法において、データにジャンプが発生する主な原因は、搬送波位相に電離層遅延や対流圏遅延による長周期の誤差成分が重畳しているからである。これに対して、PVD法では、フィルタ処理(例えば、ハイパスフィルタ処理)によってこれらの長周期の誤差成分が除去されるため、PVD法による計測データにジャンプが発生することはない。
【0048】
ところで、RTK法によって得られる基準局の海面位置データには波浪成分が含まれているため、何も信号処理を行わなければ異常値の検出は不可能である。しかし、RTK法の生データに一般的なローパスフィルタを適用して波浪成分を除去することにより、変動の有無を確認することができるが、変動成分(減算値)そのものが平滑化されるため、ある程度の時間が経過しなければ異常値であると判定できない。分かり易くいうと、瞬時にジャンプがあったとしても、この部分の前後を平滑化(平均化)すると、その変化曲線がある程度の傾斜角を有することになるから、少し時間が経過しないと、ジャンプの有無を判断することができない。よって、リアルタイムでの異常値の検出をすることができない。
【0049】
これに対し、上記実施の形態1では、2つのリアルタイム観測手法(RTK法とPVD法)によるデータの偏差をとっており、その変動成分(源算値である)が平滑化されることが無いため、時間遅れなく瞬時に異常値の検出を行うことができる。また、RTK法による計測データに異常が生じたときに、PVD法による計測データを用いて補完することができるので、観測データの測得率の向上が見込まれる。
【0050】
ここで、上記実施の形態1に係る海面変位計測方法を、ステップ形式で記載すると以下のようになる。
すなわち、この海面変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法により海面位置データを求める第1演算ステップと、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常であると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
[実施の形態2]
次に、本発明の実施の形態2に係るRTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法[GPSによる海面変位計測装置(海面変位計測システム)および海面変位計測方法]を、図6に基づき説明する。
【0051】
上述した実施の形態1においては、PVD法により得られた海面位置データの波浪成分を用いて海面位置データに異常が発生しているか否かを検出するように説明したが、本実施の形態2においては、精密変動計測方法[以下、KVD(Kinematics for precise Variance Detection)法という(特開2001−281323号公報参照)]を用いて波浪成分(波浪データ)を求めるようにしたものである。
【0052】
なお、本実施の形態2の構成と、上記実施の形態1の構成との相違点は、PVD演算部の替わりにKVD演算部を用いたものであり、したがってこれ以外の構成部材については、殆ど同一であるため、同一の構成部材については、実施の形態1で付した部材番号を用いるとともに、この相違部分に着目して説明するものとする。
【0053】
以下、この海面変位計測装置を概略的に説明する。
すなわち、この海面変位計測装置は、基準局1からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法により観測局の海面位置データを求めるRTK演算部(第1演算部)11と、基準局1からの基準計測データおよび観測局2からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により変動成分すなわち波浪成分(短周期成分)である海面変位量を求めるKVD演算部(第2演算部)12′と、上記RTK演算部11にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部13と、この潮位予測部13にて求められた予測潮位に上記KVD演算部12′にて求められた海面変位量を加算する加算部14と、この加算部14にて求められた予測海面位置データおよび上記RTK演算部11にて求められた実測海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部15と、上記RTK演算部11にて求められた実測海面位置データおよび上記KVD演算部12′にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこれら多数(複数)の減算値[または時間変化率(微分値)]に基づきRTK演算部11にて求められた海面位置データが異常であるか否かを判断する異常判断部16とを具備し、且つこの異常判断部16にて異常であると判断された場合に、上記潮位予測部13にて用いられる潮位予測式については更新しないようにされている。すなわち、二次多項式の係数を更新しないで予測潮位が求められ、また異常であると判断された場合に、異常判断部16から、その判断結果が上記データ選択部15に出力されて、上記加算部14にて得られた予測海面位置データを出力するように構成されている。
【0054】
ここで、KVD法を一般的に説明する。
このKVD法は、基準GPS受信機(基準局である)と物体に配置される観測GPS受信機(観測局である)とにおける相対ベクトル(相対変位)を、物体の変動に依存しない長周期変動成分と、物体の変動に依存する短周期変動成分とに分けるとともに、短周期変動成分を、基準GPS受信機からGPS衛星に向かう単位ベクトルの各x,y,z軸成分にて表し、少なくとも3個のGPS衛星と各GPS受信機との間の搬送波位相を計測するとともに、この計測データをバンドパスフィルタに通して、相対ベクトルの短周期変動成分に相当する短周期位相成分を抽出し、この短周期位相成分について、各GPS受信機と各GPS衛星との間の受信機間一重差を少なくとも3個求めるとともに、これら少なくとも3個の受信機間一重差に基づき相対ベクトルの短周期変動成分の各軸成分を演算により求めて物体の変位を計測する方法である。
【0055】
以下、少し詳しく説明する。
まず、基準GPS受信機と観測GPS受信機との間の下記(6)式に示す相対ベクトル(相対位置ベクトル、相対変位ベクトルともいう)Δ*r(なお、*の記号は、それに続く記号がベクトルであることを示している。但し、式中においては、太字で示している。以下、同じ。)を、下記(7)式および(8)式に示すように、物体(観測点)の変動に依存しない長周期変動成分Δ*rL(Lの記号で長周期分を示し、式中では、∧のハットの記号で示す。以下、同じ。)と、物体の変動に依存する短周期変動成分Δ*rS(Sの記号で短周期分を示し、式中では、〜の波の記号で示す。以下、同じ。)とに分け、各成分を表示すると、下記(9)式のようになる。また、式中、x,y,zは、測地座標系でのx座標,y座標,z座標を示し、添え字の数字1は観測GPS受信機、数字0は基準GPS受信機を示す。
【0056】
【数6】
上記(9)式を距離ρについての受信機間一重差を求める下記(10)式に代入すると、下記(11)式が得られる。
【0057】
【数7】
(Δρ)01iの短周期変動成分を(ΔρS)01i(t)とすると下記(12)式が求められる。
【0058】
【数8】
ところで、衛星に起因する誤差が少ない場合には,搬送波位相の受信機間一重差(Δφ)01iの短周期変動成分である短周期位相成分を(ΔφS)01i(t)とすると、(ΔN)01iは時間的に変動しない(Nは整数値アンビギュイティを示す)、すなわち物体の変動に依存しない長周期変動成分であるので、下記(13)式が成立する。
【0059】
【数9】
したがって、3個以上の衛星情報から3個以上の短周期位相成分(ΔφS)01i(t)が得られれば,3個の(12)式を得ることができ、従って相対ベクトルの短周期変動成分ΔrS(t)=(ΔxS01i(t),ΔyS01i(t),ΔzS01i(t))を決定することができる。
【0060】
この搬送波位相φの時間的に変動する成分、すなわち物体の変動に依存する短周期位相成分φSαi(t);(α=0,1)は,生の観測値φαiに、所定のバンドパスフィルタをかけることにより求めることができる。
【0061】
すなわち、バンドパスフィルタを通過した搬送波位相の時間変動成分である短周期位相成分φSに基づき、観測受信機が設けられた物体の変位を計測することができる。
海面変位計測方法については、実施の形態1にて説明したものと同一であるため、その説明を省略する。
【0062】
なお、上述した実施の形態1との相違点は、PVD演算部の替わりに、KVD演算部を用いただけであり、しかも、両演算部で求めるデータとしても、同じ波浪成分のデータであるため、実施の形態1に係る効果と同様の効果が得られる。
【0063】
すなわち、実施の形態2に係る海面変位計測装置および海面変位計測方法によると、RTK法により求められた海面位置データに対して、単独測位方式によるPVD法または相対測位方式によるKVD法により求められる波浪成分を減算するとともに、この減算値または減算値の時間変化率(微分値)に基づき、海面位置データにジャンプなどの異常(異常測位データ)が生じているか否かを判断し、もし異常であると判断された場合に出力するデータについては、潮位予測部から得られた潮位に波浪成分を加算した正常な予測海面位置データとしたので、データに異常は検出されない。したがって、津波を監視しているような場合に、当該異常データを津波と誤って検出することがないため、津波警報を誤って発令するのを防止することができる。
【0064】
ここで、上記実施の形態2に係る海面変位計測方法を、ステップ形式で記載すると以下のようになる。
すなわち、この海面変位計測方法は、地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法により海面位置データを求める第1演算ステップと、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常であると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させる方法である。
【図面の簡単な説明】
【0065】
【図1】本発明の実施の形態1に係る変位計測装置の概略構成を示すブロック図である。
【図2】同変位計測装置の異常判断部における判断部の概略構成を示すブロック図である。
【図3】同変位計測装置の潮位抽出部にて用いられるローパスフィルタの特性図で、(a)はインパルス応答、(b)は振幅応答を示す。
【図4】同変位計測装置のデータ解析部における津波抽出部の概略構成を示すブロック図である。
【図5】同変位計測装置にて計測または抽出される波形データの図で、(a)はRTK法により求められた海面位置データ、(b)は波浪、(c)は潮位、(d)は津波を示す。
【図6】本発明の実施の形態2に係る変位計測装置の概略構成を示すブロック図である。
【符号の説明】
【0066】
1 基準GPS受信機
2 観測GPS受信機
11 RTK演算部
12 PVD演算部
12′ KVD演算部
13 潮位予測部
14 加算部
15 データ選択部
16 異常判断部
17 データ選択部
21 減算部
22 判断部
41 津波抽出部
42 潮位抽出部
43 津波抽出部
51 実測潮位検出部
52 潮位推定部
53 津波検出部
【特許請求の範囲】
【請求項1】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したことを特徴とするGPSによる変位計測装置。
【請求項2】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させることを特徴とするGPSによる変位計測方法。
【請求項3】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したことを特徴とするGPSによる変位計測装置。
【請求項4】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させることを特徴とするGPSによる変位計測方法。
【請求項1】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したことを特徴とするGPSによる変位計測装置。
【請求項2】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
観測局からの観測計測データを入力して単独測位方式を用いて変動成分を得る高精度変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させることを特徴とするGPSによる変位計測方法。
【請求項3】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとに基づき海面変位を計測する装置であって、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、リアルタイムキネマティック法(RTK)により観測局の海面位置データを求める第1演算部と、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算部と、
上記第1演算部にて求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測部と、
この潮位予測部にて求められた予測潮位に上記第2演算部にて求められた海面変位量を加算して予測海面位置データを求める加算部と、
この加算部にて求められた予測海面位置データおよび上記第1演算部にて求められた実測による海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択部と、
上記第1演算部にて求められた実測海面位置データおよび上記第2演算部にて求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算部にて求められた海面位置データが異常であるか否かを判断する異常判断部とを具備し、
且つこの異常判断部にて異常測位データであると判断された場合、上記潮位予測部にて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、この判断結果を上記データ選択部に出力して、上記加算部にて得られた予測海面位置データを出力させるように構成したことを特徴とするGPSによる変位計測装置。
【請求項4】
地上に設置された基準GPS受信機(以下、基準局と称す)にて得られた計測データと、所定海域に係留された観測ブイに設置された観測GPS受信機(以下、観測局という)にて得られた計測データとを用いてリアルタイムキネマティック法(RTK)により海面位置データを求める第1演算ステップと、
基準局からの基準計測データおよび観測局からの観測計測データを入力して、相対測位方式を用いて変動成分を得る精密変動検出法により波浪成分である海面変位量を求める第2演算ステップと、
上記第1演算ステップで求められた海面位置データを入力するとともに過去の海面位置データに基づき決定され且つ時間の経過とともに更新される潮位予測式を用いて潮位を予測する潮位予測ステップと、
この潮位予測ステップで求められた予測潮位に上記第2演算ステップで求められた海面変位量を加算して予測海面位置データを求める加算ステップと、
この加算ステップで求められた予測海面位置データおよび上記第1演算ステップで求められた実測の海面位置データを入力するとともにいずれか一方の海面位置データを出力するデータ選択ステップと、
上記第1演算ステップで求められた実測海面位置データおよび上記第2演算ステップで求められた海面変位量を入力して両者の差である減算値を求めるとともにこの減算値または減算値の微分値に基づき第1演算ステップで求められた海面位置データが異常であるか否かを判断する異常判断ステップとを具備し、
且つこの異常判断ステップで異常測位データであると判断された場合、上記潮位予測ステップにおいて予測潮位を求める際に、潮位予測式の更新を行わないようにするとともに、上記データ選択ステップにおいて上記加算ステップで得られた予測海面位置データを出力させることを特徴とするGPSによる変位計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−281896(P2009−281896A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2008−134870(P2008−134870)
【出願日】平成20年5月23日(2008.5.23)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【出願人】(501241911)独立行政法人港湾空港技術研究所 (84)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【出願人】(000005119)日立造船株式会社 (764)
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願日】平成20年5月23日(2008.5.23)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【出願人】(501241911)独立行政法人港湾空港技術研究所 (84)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【出願人】(000005119)日立造船株式会社 (764)
【Fターム(参考)】
[ Back to top ]