
SAR画像を圧縮解除する方法および装置
合成開口レーダー(SAR)画像を圧縮解除するコンピュータ・システム60は、圧縮解除されるべきSAR画像を記憶するデータベースと、データベースからのSAR画像を圧縮解除するプロセッサ69とを有する。前記圧縮解除は、SAR画像を受領し、SAR画像に対してダイナミック・レンジ圧縮を実行し、圧縮されたSAR画像を量子化することを含む。量子化された圧縮されたSAR画像は次いで、それに非等方拡散アルゴリズムを適用することによって圧縮解除される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理の分野に、より詳細には合成開口レーダー(SAR: synthetic aperture radar)画像の処理に関する。
【背景技術】
【0002】
SARデータの解像度は電気光学(EO: electro-optical)データの解像度には匹敵しない。EOセンサーは、写真デバイスおよび光検出・測距(LIDAR[ライダー]: light detection and ranging)コレクタのような他の光学的撮像装置を含む。EOセンサーは、シーンからの光の反射率を捉えてその写真画像を提供するという意味で受動的である。しかしながら、EOセンサーは時刻および大気条件によって制限される。
【0003】
合成開口レーダー(SAR)は、昼でも夜でも、悪天候でも画像が取得できるという利点がある。SARは、SAR画像を生成するために無線周波(RF)信号からの後方散乱された放射を記録するという意味で能動的である。SARの各解像度セルは一般に多くの散乱体をもつ。これらの散乱体からの戻り信号の位相はランダムに分布され、結果として得られる干渉がスペックルを引き起こす。
【0004】
スペックルは、最終的に閲覧される検出された画像において粒状の外観を与え、このためEO画像と比べたときにより低い解像度となっている。スペックルはなされうる測定の精度に対して著しい制限を課す。たとえば、計量はしばしばSARデータにおいて包含的である。サイド・ローブ干渉もSARデータに対しノイズのある見かけを生成する。さらに、ハードウェア誤動作または電波干渉はSARデータの忠実度を低下させうる。
【0005】
SARデータは現在、メイン・ローブおよびサイド・ローブが除去される何らかの形のアポディゼーションを用いて処理されている。しかしながら、アポディゼーションはSARデータが二値に見えるようにする。これも、粒子状の外観をもつ検出画像につながる。SARデータはまた、テイラー重み付けのような低域通過フィルタを用いて処理されている。しかしながら、散乱体が一緒にぼかされてしまうことがあり、低下した解像度につながる。SARデータを処理するために使用される現行のアプローチの結果として、位置合わせ(registration)、道路検出、変化検出、高度抽出(elevation extraction)および計量(mensuration)を含むある種の解析応用が包含的(inclusive)であることができる。
【0006】
スペックルを含むSAR画像について、向上の目標は、重要な画像特徴を破壊することなくスペックルを除去することである。ピクセルの輝度は、解像度セル(resolution cell)における散乱体の属性によってのみならず、これらの散乱体からの戻りの間の位相関係によっても決定される。しかしながら、ある種の応用では、スペックルの除去は逆効果でありうる。スペックルの保持が重要である例は、特徴の検出がスペックル・パターンと同じスケールである場合である。SARデータからスペックル除去するとともに解像度を向上させるためのある既知の技法は、非等方拡散(anisotropic diffusion)アルゴリズムの適用である。
【0007】
SARデータをスペックル除去するための一つのアプローチは、Yuらによる「Speckle Reducing Anisotropic Diffusion」と題された論文において開示されている。スペックル除去のために偏微分方程式(PDE: partial differential equation)アプローチが使われる。具体的には、画像スケール空間が生成される。これは、細かいから粗いまで変わる、フィルタリングされた画像の集合である。もう一つのアプローチは、Xiらによる「Anisotropic Diffusion Despeckling For High Resolution SAR Images」と題された論文において開示されている。離散化スキーム、すなわち加法的演算子分割(AOS: additive operator splitting)スキームに基づく非線形拡散フィルタリング・アルゴリズムが離散画像データにおいて適用される。これらのアプローチのいずれも、ノイズを削減し、エッジを保持することによってSARデータの解像度を改善することにつながるが、いまだ、SARデータをより高解像度のEOデータのように見えさせる要求がある。
【発明の概要】
【発明が解決しようとする課題】
【0008】
以上の背景に鑑み、よりEOデータのように見えるようSARデータの解像度を改善することが本発明の目的である。
【課題を解決するための手段】
【0009】
本発明に基づくこのことおよびその他の目的、特徴および利点は、合成開口レーダー(SAR)画像を処理するためのコンピュータ実装された方法であって、処理されるべきSAR画像中のノイズを決定し、決定されたノイズに基づいてそのSAR画像についてのノイズ閾値を選択し、選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整することによって提供される。調整された非等方拡散アルゴリズムがSAR画像に適用される。
【0010】
ノイズは、SAR画像の勾配値の統計的解析に基づいて決定されてもよい。統計的解析は、たとえば勾配値の標準偏差に定数を加えたものに基づいていてもよい。あるいはまた、ノイズは、フーリエ・ウィンドウイング方式またはウェーブレット分解に基づいて決定されてもよい。
【0011】
非等方拡散アルゴリズムは、非定数項を含む熱伝導方程式(heat equation)に基づいていてもよい。非等方拡散アルゴリズムを数学的に調整することは、選択されたノイズ閾値に基づいてその非定数項を調整することを含んでいてもよい。非定数項を調整することによって、これは、熱伝導方程式が処理されているSARデータに合わせて調節されることを有利に許容する。結果として、所望される結果を得るためにあるクラスの関数が生成されることができる。ここで、各関数は処理されている特定のSARデータに対応する。複数の異質な(disparate)SARデータ・セットが、閲覧されるSAR画像の解像度を改善するよう、よりよく処理されることができる。
【0012】
本発明のもう一つの側面は、複素非等方拡散アルゴリズムに向けられる。上記の非等方拡散アルゴリズムのための方程式が複素データのために改めて導出され、それによりプロセスは今では非線形である。複素データを使うと、SARデータ・セットの実成分と虚成分が同時に処理される。SARデータ・セットの実成分と虚成分は複素オブジェクトとして扱われているので、複素非等方拡散アルゴリズムは、きわめてノイズの多いデータからシーン内容を引き出すことができ、それは今度は閲覧されるSAR画像の解像度を改善する。
【0013】
複素SAR画像を処理するためのコンピュータ実装される方法が、複数のピクセルを含むSAR画像のための複素SARデータ・セットを受け取り、複素非等方拡散アルゴリズムをその複素SARデータ・セットに適用することを含む。複素SARデータ・セットは各ピクセルについて実部および虚部を有する。複素SARデータ・セットが周波数空間で受け取られる場合、周波数空間は像空間に変換される。周波数空間は各ピクセルについての位相およびパワーに対応し、像空間は各ピクセルについての位相および振幅に対応する。
【0014】
複素非等方拡散アルゴリズムはまた、特にたとえば都市域における沈下測定のために、SARデータの干渉測定処理においても使用されうる。沈下とは、地表の高度が界面レベルに対して低下する地形変位である。
【0015】
干渉測定SAR画像(interferometric SAR image)を処理するコンピュータ実装された方法が、同じシーンの第一および第二の複素SARデータ・セットを受け取ることを含み、第二の複素SARデータ・セットは第一の複素SARデータ・セットに関して位相がオフセットされている。それぞれの複素SARデータ・セットは複数のピクセルを含みうる。第一および第二の複素SARデータ・セットに基づいてそれらの間の位相差を提供するためのインターフェログラムが形成される。複素非等方拡散アルゴリズムはそのインターフェログラムに適用され、ここで、インターフェログラムは各ピクセルについて実部および虚部をもつ。そのインターフェログラムにショック・フィルタ(shock filter)が適用される。
【0016】
複素非等方拡散アルゴリズムは、インターフェログラムにおいて、局所的にはノイズを緩和し、同時にシーン不連続は保持する。ショック・フィルタは画像のぼけ除去(deblurring)のために使われる。複素非等方アルゴリズムを介した非線形平滑化およびショック・フィルタを介した境界向上は、位相差測定の精度および品質を向上させる。沈下は、シーン中の持続的なオブジェクト(たとえば建物)を参照点として使って測定されるので、持続的なオブジェクトの境界品質を改善することは、沈下測定を改善する。
【0017】
本方法はさらに、ショック・フィルタの適用後にインターフェログラムに対して二次元変分式位相復元〔アンラッピング〕(variational phase unwrapping)を実行することを含みうる。二つの位置合わせされたSAR画像の間の位相差は、表面地勢のような関心のある所望の物理量に関係している。位相差は2Bを法としてのみ登録されることができ、現行の干渉測定技術は主として、離散値を使って登録された位相(ラッピングされた位相)から絶対位相(復元〔アンラッピング〕された位相)を回復し、それはデータをなめらかにする傾向をもつ。
【0018】
本発明に基づく変分式位相復元アルゴリズムは、平滑化を制御するためのコスト関数に基づいていてもよい。データの属性に基づいたグローバルな平滑化を提供する代わりに、変分式位相復元アルゴリズムはエッジには手をつけずにおき、エッジに隣接する領域を選択的になめらかにする。結果として、複素非等方拡散アルゴリズムに基づくSARデータの干渉測定処理、ショック・フィルタおよび変分式位相復元がまとまって境界品質を改善し、それが今度は沈下測定を改善する。
【0019】
非等方拡散アルゴリズムはまた、SAR画像を圧縮および圧縮解除することにおいて使用されてもよい。非等方拡散アルゴリズムを適用することの利点は、使用される圧縮方式にかかわらず、圧縮後のSAR画像のサイズがより小さなサイズのファイルを生じるということである。SAR画像を圧縮解除する面では、SARデータを動的に圧縮し、そのデータを量子化し、次いで非等方拡散アルゴリズムを用いて圧縮解除することによって、やはりより小さなサイズのファイルが達成される。ダイナミック・レンジが大きいほど、圧縮率はよくなる。結果として、非等方拡散アルゴリズムに基づいて圧縮されたおよび圧縮解除されたSAR画像の記憶および伝送は、より少ないスペースおよびバンド幅を占有する。
【0020】
非等方拡散アルゴリズムはまた、SAR画像のための高度抽出および位置合わせにおいても使用されうる。SAR画像を位置合わせするためのコンピュータ実装された方法は、位置合わせされるべき第一および第二のSAR画像を選択し、選択された第一および第二のSAR画像を非等方拡散アルゴリズムを用いて個々に処理し、その処理後、第一および第二のSAR画像を位置合わせすることを含む。本方法はさらに、位置合わせの前に、ショック・フィルタをそれぞれ第一および第二の処理されたSAR画像に適用することを含む。この方式は、SAR画像位置合わせについてより高い精度を提供し、それが今度は位置合わせされたSAR画像に基づいて高度データがよりよく抽出されることを許容する。
【0021】
非等方拡散アルゴリズムおよびショック・フィルタのさらにもう一つの応用は、材料分類のためのベクトルおよび道路抽出に関するものである。SAR画像におけるベクトル抽出のためのコンピュータ実装された方法は、ベクトル抽出のためにSAR画像を選択し、選択されたSAR画像を非等方拡散アルゴリズムで処理し、処理されたSAR画像に基づいてベクトル・データを抽出することを含む。ショック・フィルタは、抽出の前に処理されたSAR画像に適用されうる。次いで道路画像データが、抽出されたベクトル・データに基づいて抽出されうる。データはこうして、非等方拡散アルゴリズムのコヒーレントなスキームを使って線引きされる(delineated)。この方式は道路抽出のためのより高い精度を提供する。
【図面の簡単な説明】
【0022】
【図1】本発明に基づく、SAR画像の収集および処理の概略的なブロック図である。
【図2】本発明に基づく、SARデータ・セットについてピクセル強度の分布プロットである。
【図3】本発明に基づく、SARデータ・セットについて勾配値の分布プロットである。
【図4】図2および図3に示されたプロットに対応するSARデータ・セットの画像である。
【図5】図2および図3に示されたプロットに対応する勾配の画像である。
【図6】従来技術に基づく重み付け方式を用いて向上された勾配の画像である。
【図7】本発明に基づく非等方拡散アルゴリズムを用いて向上された、図6に示されたのと同じ画像勾配を示す図である。
【図8】本発明に基づくフィルタリング前のもとの画像である。
【図9】従来技術に基づくフィルタリング後の、図8に示されたもとの画像に対応する画像である。
【図10】従来技術に基づくフィルタリング後の、図8に示されたもとの画像に対応する画像である。
【図11】従来技術に基づくフィルタリング後の、図8に示されたもとの画像に対応する画像である。
【図12】本発明に基づく非等方拡散アルゴリズムを用いたフィルタリング後の、図8に示したもとの画像に対応する画像である。
【図13】本発明に基づく、フィルタリング前のもとの画像である。
【図14】本発明に基づく、複素非等方拡散アルゴリズムを用いたフィルタリング後の、図13に示されるもとの画像に対応する画像である。
【図15】本発明に基づく沈下測定のための干渉測定SARデータの非線形処理を示すフローチャートである。
【図16】本発明に基づくショック・フィルタの適用前の、もとの近接ベクトル多スペクトル画像である。
【図17】本発明に基づくショック・フィルタの適用後の、図16に示したもとの画像に対応する画像である。
【図18】AおよびBは、本発明に基づく干渉測定処理前の、もとのシーンの二次元および三次元画像である。
【図19】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図20】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図21】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図22】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図23】本発明に基づく干渉測定処理前のもとのシーンの、上から見下ろした二次元画像である。
【図24】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図25】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図26】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図27】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図28】本発明に基づいてフィルタリングされる前のもとの画像である。
【図29】従来技術に基づくガウシアン・フィルタの適用後の、図28に示されたもとの画像に対応する画像である。
【図30】本発明に基づく複素非等方拡散アルゴリズムを用いたフィルタリングの複数反復後の、図28に示されたもとの画像に対応する画像である。
【図31】本発明に基づくSARデータの圧縮を例示する画像である。
【図32】本発明に基づくSARデータの圧縮を例示する画像である。
【図33】本発明に基づくSARデータの圧縮を例示する画像である。
【図34】本発明に基づくSARデータの圧縮解除を例示する画像である。
【図35】本発明に基づくSARデータの圧縮解除を例示する画像である。
【図36】本発明に基づくSARデータの圧縮解除を例示する画像である。
【図37】本発明に基づくSARデータの位置合わせを例示する画像である。
【図38】本発明に基づくSARデータの位置合わせを例示する画像である。
【図39】本発明に基づくSARデータの位置合わせを例示するプロットである。
【図40】本発明に基づくSARデータの位置合わせを例示するプロットである。
【図41】本発明に基づくSARデータの位置合わせを例示する画像である。
【図42】本発明に基づくSARデータの位置合わせを例示する画像である。
【図43】本発明に基づくSARデータの位置合わせを例示する画像である。
【図44】本発明に基づくSARデータの位置合わせを例示する画像である。
【図45】本発明に基づく道路抽出を例示する画像である。
【図46】本発明に基づく道路抽出を例示する画像である。
【図47】本発明に基づく道路抽出を例示する画像である。
【図48】本発明に基づく道路抽出を例示する画像である。
【発明を実施するための形態】
【0023】
本発明について、これから以下で、本発明の好ましい実施形態が示されている付属の図面を参照してより詳細に述べる。しかしながら、本発明は数多くの形で具現されてもよく、ここで述べられる実施形態に限定されると解釈されるべきではない。むしろ、これらの実施形態は、本開示が十全かつ完備であり本発明の範囲を当業者に十二分に伝達するよう提供されている。同様の符号は全体を通じて同様の要素を指す。
【0024】
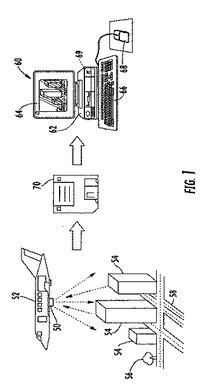
まず図1を参照すると、合成開口レーダー(SAR)50はSARデータを収集し、コンピュータ実装されたシステム60がそのSARデータを処理する。SAR50は航空機のような飛行プラットフォーム52によって関心のある領域上空に担持される。飛行プラットフォーム52は宇宙ベースであってもよい。
【0025】
図示した関心領域は、いくつかの建物54を含む、都市のような市街地である。この市街地には樹木56および道路58のような、たとえば建物54と比べて比較的小さな特徴も含まれている。あるいはまた、関心領域は、建物54が全くではないまでもほとんどない地方の領域であってもよい。
【0026】
当業者は、SAR画像がまず、閲覧のために実数値に変換される前に複素数値として受け取られることを認識するであろう。SAR画像は最初に、位相およびパワーを含むk空間において受け取られる。k空間での戻りデータの逆フーリエ変換を取ることによって、像空間が生成される。像空間は位相および振幅を含む。像空間は位相および振幅の情報を含むので、スペックルを被る。SAR画像を見るためには、像空間中のデータの絶対値を取ることによって、像空間から位相が除去される。これが、閲覧用の、検出されたまたは実画像を生成する。
【0027】
ひとたびSAR画像が収集されると、それらの画像は、たとえばコンピュータ62への搬送のために、磁気ディスクのような記憶媒体70上に記憶されてもよい。コンピュータ62内で、SAR画像は、処理されるべきSAR画像のデータベースの一部として記憶されてもよい。もちろん、SARデータを搬送するための他の好適な方法が使用されてもよい。そのことは当業者は容易に認識するであろう。収集されたSAR画像は複素数値または実数値でありうる。
【0028】
処理後にSAR画像を閲覧するためにディスプレイ64がコンピュータ62に接続されている。キーボード66およびマウス68のような入力装置もコンピュータ62に接続されている。本発明によれば、コンピュータ62はSAR画像を処理するためのプロセッサ68を含む。
【0029】
よりEOデータのように見えるようSARデータの解像度を改善するための一つの側面は、二階線形偏微分方程式である熱伝導方程式を修正することに基づく。熱伝導方程式は:
【数1】
のようになっている。
【0030】
ある種の条件のもとでは、熱伝導方程式の基本解はガウス密度関数である。熱伝導方程式は:
【数2】
と書ける。
【0031】
変数cは対流関数(convection function)として知られており、tは時間に対応し、xおよびyは収集されたSARデータに基づく複素数を形成する。本発明によれば、変数cは定数値ではない。これは有利なことに、cが定数値でないので、熱伝導方程式が処理されているSARデータに合わせて調整されることを許容する。
【0032】
結果として、所望される結果を得るためにあるクラスの関数が生成されることができる。ここで、各関数は処理されている特定のSARデータに対応する。市街域内では、一つのSARデータ・セット内の散乱体は他のSARデータ・セット内の散乱体とは異なり、それぞれのSARデータ・セットが異質であることがありうる。
【0033】
SARデータ・セットどうしが似ていないので、同じ関数(たとえば非等方拡散アルゴリズム)の適用は、より密接にその関数にマッチしているほうのSARデータ・セットの解像度を改善する結果となる。その関数に密接にマッチしていない他方のSARデータ・セットについては、その解像度は、より密接にマッチした関数が使われたとした場合ほど良好ではないであろう。同じことは、地方の領域からのデータ・セットについても言える。
【0034】
個別のSARデータ・セットによりよくマッチするよう対流関数cを変えることによって、cが定数値であった場合よりも、閲覧のための対応する実数値画像がよりよい解像度をもつことになる。対流関数cが定数値であるときには、異質なSARデータ・セットが等しく扱われる。一定でないcは、非等方拡散アルゴリズムがSARデータ・セットを、同時にぼかしかつ鮮鋭化することを許容する。対流関数cを介して熱伝導方程式を数学的に調節することによって、複数の異質なSARデータ・セットがよりよく処理される。
【0035】
熱伝導方程式を数学的に調節するために、SARデータ・セットにおけるノイズが決定される必要がある。ノイズを判別する一つのアプローチは、処理されるべき各SARデータ・セットにおける勾配値についての統計を集めることに基づく。統計は、実際のSARデータ・セットそのものについて集められることもできるし、あるいはすでに処理された類似のSARデータ・セットに基づいてあらかじめ決定されていてもよい。ノイズを判別するための他のアプローチは、フーリエ・ウィンドウイング方式またはウェーブレット分解を含む。このことは当業者は容易に理解するであろう。
【0036】
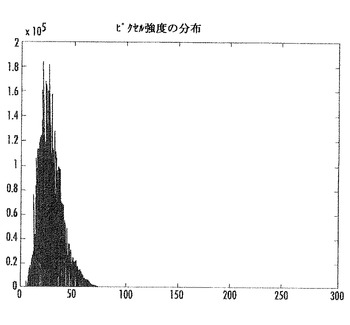
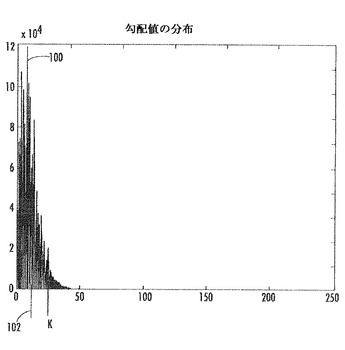
統計的解析に基づくSARデータ・セットにおけるノイズの計算を例解するために、図2〜図4を参照する。ノイズの計算は、そのSARデータ・セットに適用されるべき非等方拡散アルゴリズム内の対流関数cを数学的に調節するために使われる。SARデータ・セットについてのピクセル強度の分布が図2に与えられている。一方、これらのピクセルについての勾配値の分布が図3に与えられている。勾配値の分布は、同じ値にある勾配値の数である。たとえば、12×104でピークになっているスパイク100は、その同じ値である120,000個の勾配があるということを意味する。
【0037】
ノイズについての統計を集めることは、勾配値の標準偏差に基づいていてもよい。ひとたび標準偏差が決定されると、標準偏差の整数倍に所定の定数を加えてノイズ閾値kを得てもよい。ひとたびそのSARデータ・セットについてノイズ閾値kが決定されると、対応する非等方拡散アルゴリズムが適用されて、kの右側の値をなめらかにする一方、kの左側の値はなめらかにしない。kの左側の値をなめらかにしないことによって、シーン内のエッジが保存される。
【0038】
図3における勾配値の例示された分布についての標準偏差は、参照符号102に対応する線によって示されている。閾値kは、標準偏差の2倍にある定数を加えたものとして設定される。所望される閾値kを選択するには、このアプローチの変形や他の統計的アプローチが使用されてもよい。このことは当業者は容易に認識するであろう。
【0039】
閾値kはk値として知られている。高い勾配値は、不変のままとなるべき明るい散乱体に対応する。したがって、k値は、明るい散乱体をぼかすことなく設定される。対照的に、同じように見える勾配値はなめらかにされる。閾値kを調節することによって、処理されているSARデータ・セットに固有の所望される結果を生成するために、異なる複数のクラスの関数が使用されることができる。ノイズ閾値kを介して対流関数cを調節することの利点は、エンドユーザーが複数の非等方拡散アルゴリズムのうちから、そのSARデータ・セットを処理するためにより好適なものを選択する必要がないということである。その代わり、この選択は、ひとたびノイズ閾値kが選択されたら自律的になされる。
【0040】
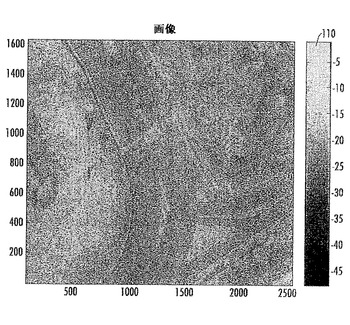
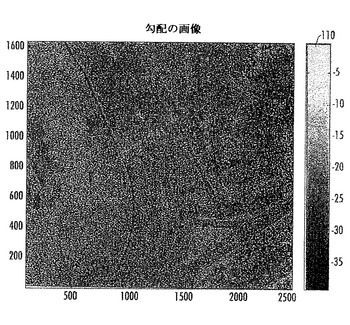
図2および図3におけるピクセル強度および勾配値の分布は、図4に示された画像および図5に示された勾配の画像に対応する。これら二つの画像は非常に似通っている。各画像は、その画像を閲覧するための強度の量を表すdBスケール110を含む。
【0041】
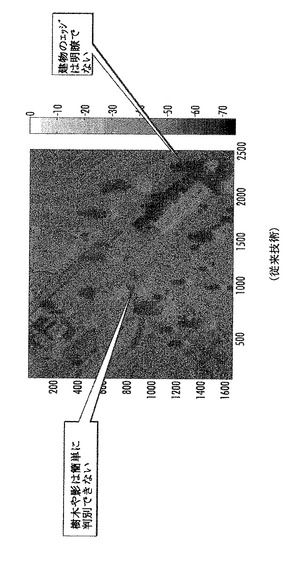
図6において表示されている勾配の画像については、たとえばテイラー重み付けのような従来式の重み付け方式が、SARデータ・セットの処理の際に適用されている。図示されたキャプションは、建物のエッジが明瞭でなく、樹木や影も簡単に判別できないことを指摘している。
【0042】
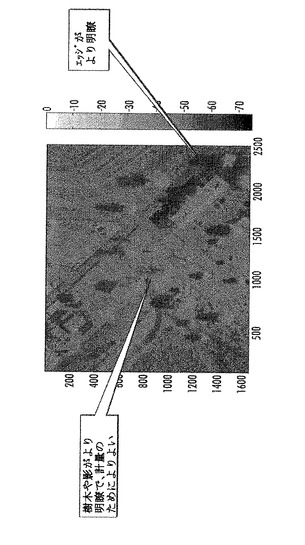
図7では、SARデータ・セットについてのノイズ閾値kが、上で論じたように勾配値の分布の統計的解析に基づいて設定されている。スマート・フィルタと称してもよいであろう調整されたフィルタリングは、どこで平滑化が実行されるべきかを調節することによって、処理されているSARデータによりよくマッチする。結果として、図示されたキャプションは、建物のエッジがより明瞭であり、樹木および影がより明瞭であることを指摘している。これはよりよい計量のために有利である。
【0043】
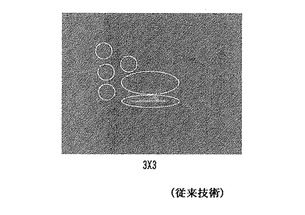
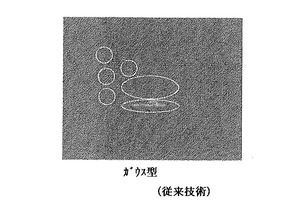
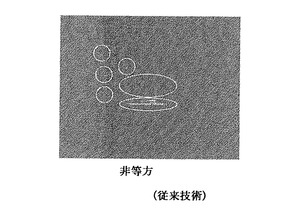
ここで、異なる複数のフィルタリング方式を使った同じシーンの比較を、図8〜図12を参照して論じる。関心のあるさまざまな散乱体は、各図において丸で囲まれている。いかなるフィルタリングも適用する前のもとのシーンが図8に示されている。図9では、もとのシーンのフィルタリングが9のグリッド・ウィンドウに基づいている。3×3のピクセルからなる各群が平均され、これがSARデータ・セット内の全ピクセルについて繰り返される。標準的なガウス・フィルタが図10に示すようにもとのシーンに適用され、標準的な非等方拡散アルゴリズムが図11に示すようにもとのシーンに適用される。
【0044】
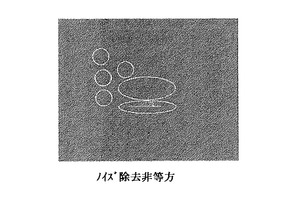
散乱体の成分には手をつけずにもとのシーンにおける散乱体のまわりのノイズをよりよく除去するために、SARデータ・セット内のノイズがまず判別される。選択されたノイズ閾値kに基づいて、非等方拡散アルゴリズムがしかるべく調節されて、図12に示すようにより高い解像度の画像を提供する。
【0045】
非等方拡散アルゴリズムは図11ではシーンに適用されているが、散乱体はいまだ、その周囲にマルチバウンス(multi-bounce)として知られるものをもっている。マルチバウンスでは、波が散乱体に当たり、地面と連絡をもち、その結果、散乱体のまわりじゅうでバウンスする。マルチバウンスはノイズのように見えるが、いくつかの状況では、散乱体についての有用な情報を明かすことがある。図12では、対流関数cは、マルチバウンスが除去されるよう選択されている。
【0046】
処理されているSARデータ・セットについての勾配値の分布の統計的解析に基づいて選択的に対流関数cを制御することの利点は、増加した解像度を提供する。領域内平滑化およびエッジ保存が、加法的ノイズによって損なわれた画像について提供される。SARデータ・セットがスペックルを含む場合には、調節可能な対流関数cをもつ非等方拡散アルゴリズムがエッジに敏感なスペックル制限を生じる。
【0047】
SARデータ・セットの全体的な忠実度を改善するためのハードウェアおよび/またはソフトウェアを使って、選択的に制御された対流関数cは生の複素データ(すなわち、実成分および虚成分)ならびに検出された画像(すなわち実成分のみ)に対して有利に適用されることができる。これはまた、処理されているSARデータ・セットについてのノイズ閾値の選択に基づいて自律的になされることもできる。こうして、高解像度のEOのようなシーンがSARデータ・セットから生成されることができる。SARデータ・セットにおいてノイズを除去しかつ似たようなデータ領域をなめらかにすることを同時に行うことによって、高周波データが保存される。結果として、情報テクスチャーおよび線状構造が保存される。これは、EOデータとSARデータの間での、より高精度の評価を提供する。
【0048】
本発明のもう一つの側面は、複素非等方拡散アルゴリズムに向けられる。上で論じたような非等方拡散アルゴリズムのための方程式は、複素データのために導出し直され、それにより、プロセスは今では非線形となる。複素データを使うと、SARデータ・セットの実成分と虚成分が同時に処理される。
【0049】
対照的に、非等方拡散アルゴリズムが複素SARデータに適用されたとしても、これまでは線形な仕方でなされてきた。これは、複素SARデータの実成分と虚成分が別個に処理されて次いで結果が組み合わされるということを意味する。
【0050】
複素非等方拡散アルゴリズムのための導出し直された方程式は次のようになる:
【数3】
SARデータ・セットの実成分および虚成分は複素オブジェクトとして扱われているので、複素非等方拡散アルゴリズムは、非常にノイズの多いデータからシーン内容を引き出すことができ、これは今度は閲覧される画像の解像度を改善する。
【0051】
比較として、図13に示されるもとの画像が参照される。図13におけるもとのSAR画像に対応するSARデータ・セットに複素非等方拡散が適用され、図14に示される拡散された画像を提供する。拡散された画像では、境界および特徴が、目に見えて鮮鋭になっている。
【0052】
複素非等方拡散アルゴリズムが単一画像SARデータ・セットに適用されることに加えて、複素非等方拡散アルゴリズムは干渉測定処理(interferometric processing)に適用されてもよい。具体的には、市街地シーンについての沈下測定のための干渉測定処理が、本複素非等方拡散アルゴリズムを使うときに特に有益である。
【0053】
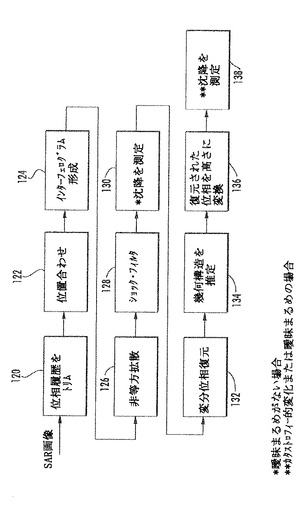
SARデータの干渉測定処理についてこれからより詳細に論じる。図15のフローチャートを参照すると、市街地における沈下測定のためのSARデータの干渉測定処理は、図示された例のように論じられる。沈下とは、海水面を基準として大地の表面の高度が低下する地勢変位である。
【0054】
位相履歴をトリムするブロック120において、SAR画像が受け取られる。議論のため、二つのSAR画像が比較されている。二つのSAR画像は同じシーンのものだが、両画像は互いからわずかにオフセットされている。このことは当業者は容易に認識するであろう。それらのSAR画像が生データとして受け取られる場合、それらのSAR画像は周波数空間から像空間に変換される。周波数空間は位相およびパワーに対応し、像空間は位相および振幅に対応する。SAR画像における各ピクセルについての位相および振幅は、処理されるべき複素SARデータについての実成分および虚成分を与える。
【0055】
位相履歴をトリムするブロック120は、非常に高レベルでは、二つのSAR画像が干渉測定処理のために好適であることを確実にする。周波数空間におけるそれぞれの位相履歴の共通部分(intersection)が二つのSAR画像の間で選択され、他のすべては破棄される。二つのSAR画像はブロック122で位置合わせされる。位置合わせは、二つのSAR画像の間の特徴が揃っていることを確実にする。たとえば、第一のSAR画像における所与の緯度/経度/高さでの建物の隅が、第二のSAR画像における同じ緯度/経度/高さに対応するよう位置合わせされる。結果として、それら二つのSAR画像の間でピクセルが整列させられる。
【0056】
ブロック124ではインターフェログラムが使用される。第一のSAR画像は第二のSAR画像の複素共役を乗算される。結果は、二つのSAR画像の間の位相差である。結果として得られるインターフェログラムは直接、高さに関係する。インターフェログラムにおいて、各ピクセルについての位相は、その虚部をその実部で除算したものの逆正接(arctan)を取ることによって得られる。第一のSAR画像について、各ピクセルについての位相データが決定される。同様に、第二のSAR画像について各ピクセルについての位相データが決定される。のちに詳細に論じるように、このインターフェログラムの、各ピクセルについての位相データは、マイナスπとプラスπの間で変動する。結果として、位相はまるめられる。
【0057】
次に、インターフェログラムをなめらかにするために低域通過フィルタが通常なら適用される。しかしながら、これはシーンにおけるエッジをぼかす傾向がある。地方のシーンについてはぼけも受け容れ可能であるが、特定のランドマークにおける沈下が測定されている市街シーンについては、ぼけは、測定された沈下の精度に影響するので、望ましくない。
【0058】
低域通過フィルタの代わりに、上で論じた複素非等方拡散アルゴリズムがブロック126において適用され、ショック・フィルタがブロック128において適用される。複素非等方拡散アルゴリズムでは、各ピクセルの実部と虚部が複素オブジェクトとして処理される。すなわち、非線形処理である。対照的に、線形処理は実部と虚部を別個に処理し、次いでそれらの結果を組み合わせることに関わる。複素非等方拡散アルゴリズムは局所的にはノイズを緩和し、同時に一方ではインターフェログラムにおけるシーン不連続部を保存する。
【0059】
ショック・フィルタは、当業者には容易に理解されるように、画像のぼけ除去のために使われる。換言すれば、シーン内の境界が、数理形態学(mathematical morphology)を使って向上される。ショック・フィルタに対応する方程式は
【数4】
となる。
【0060】
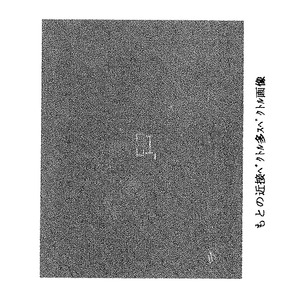
このショック方程式は、非線形の双曲線型微分方程式である。方程式の第一の部分は、ラプラシアンによって決定される収縮(erosion)/膨張(dilation)に対応する。方程式の第二の部分は勾配の絶対値である。ショック・フィルタの適用を例解するため、もとの近接(close)ベクトル多スペクトル画像が図16に示され、この画像へのショック・フィルタの適用が図17に示される。境界は、ショック・フィルタの適用後は目に見えて鮮鋭になっている。
【0061】
複素非等方アルゴリズムによる非線形平滑化およびショック・フィルタによる境界向上は、位相差測定の精度および品質を高める。沈下はシーン内の持続的なオブジェクト(すなわち建物)を参照点として使って測定されるので、持続的オブジェクトの境界品質の改善は、沈下測定を改善する。
【0062】
位相はプラスπからマイナスπまでの間でしか変動できないので、まるめられた位相(wrapped phase)と呼ばれる。二つのSAR画像の間の位相において曖昧まるめ(ambiguity wrap)がなければ、沈降はブロック130において測定されることができる。しかしながら、典型的にはそうであるように曖昧まるめが存在する場合には、ブロック132において変分式位相復元が実行される。
【0063】
変分式位相復元は、位置合わせされた第一および第二のSAR画像の間の位相差であるインターフェログラムに適用される。二つの位置合わせされたSAR画像の間の位相差は、表面地勢のような、所望される関心のある物理量に関係する。位相差は、2Bを法としてのみ位置合わせされることができ、現行の干渉測定技法は主として、離散値を使って、位置合わせされた位相(まるめられた位相)から絶対的な位相(復元された位相)を回復する。現行の位相復元は、たとえば、残差カット・ツリー(residue-cut tree)アルゴリズムおよび最小二乗アルゴリズムによって実行されうる。
【0064】
位相復元を実行するためには、実部および虚部をもつ複素オブジェクトであるインターフェログラムから位相が決定される。実部分の虚部の逆正接がそれぞれの位相を与える。振幅は破棄され、位相が残される。
【0065】
位相はプラスπからマイナスπまでの間でのみ変動できるので、まるめられた位相と呼ばれるが、現実には、位相はプラス無限大からマイナス無限大までになりうる。ここが、干渉測定プロセスにおける困難なところである。
【0066】
目標は、プラス/マイナスπの空間からプラス/マイナス無限大のスペースに行くための適正なマッピングを決定することである。しかしながら、有限画像は、シーン内の最も高いオブジェクトの高さによって制限される。最も高い建物が800フィートであれば、差は地上レベルと800フィートに基づく。理論上は、プラス/マイナス無限大は数学的には正しいが、現実には変動は0からシーン内で最も高いオブジェクトの高さまでの間である。
【0067】
変分式位相復元は、データ内の非線形性および不連続を扱う。二つのSAR画像の間の位相差を取る前のプラス/マイナスπの境界での位相まるめにおいて曖昧さが存在する。位相がまるめられる点はフリンジ線として知られる。
【0068】
変分式位相復元アルゴリズムは二次元である。一次元の位相復元技法は、沈下問題に特に適用される要件を使って二次元のために導出し直されることができる。利用可能な他の二次元位相復元技法を仕立てることもできる。
【0069】
画像解析において、セグメンテーションは、デジタル画像を何らかの基準に従って複数の領域(ピクセルの集合)に分割することである。セグメンテーションの目標は典型的には関心のあるオブジェクトを位置特定することである。セグメンテーションのためのいくつかの一般的な技法は、閾値処理(thresholding)、領域成長法(region-growing)および接続成分ラベル付け(connect-component labeling)を含む。能動輪郭法(active contours)も一般的な方法である。
【0070】
変分式位相復元アルゴリズムは、下記のようなマムフォード・シャー(Mumford-Shah)関数またはコスト関数に基づく。
【0071】
【数5】
この式は、どのfおよびCが復元された位相を提供するかを決定する。第1項は、Cに沿った不連続をもつg(画像)に対するfという区分的になめらかな近似である。式のこの部分は、fの品質の尺度となるデータ忠実度の項と考えてもよい。方程式の第2項はなめらかさの項である。これは、Cが与えられたときのfについての事前モデルと見なしてもよい。第3項はCの長さに対応する。通常、長すぎる弧長についてはペナルティがある。もとのマムフォード・シャー関数またはコスト関数は、より一般的な不連続の集合のためのハウスドルフ側度を使っていた。本発明によれば、Cは、弧長によって置き換えられるために、なめらかな曲線に制約されている。
【0072】
マムフォード・シャー関数またはコスト関数を最小化するため、フリンジ線の間のデータの不連続によりよく対処するよう新しいコスト関数が開発される。新しいコスト関数は
【数6】
というものである。
【0073】
第1項はまるめられた位相と復元された位相との間の勾配を表す。第2項は、処理されるべきシーンについての事前の知識を表す。第3項は、処理されないインターフェログラムの最大フリンジ長に対して制限を課す。たいていの位相復元アルゴリズムはなめらかなデータに対して機能する。コスト関数E(f,C)についての最小解を決定したのち、偏微分方程式(PDE)に変換がなされる。PDEは次いで解かれる。
【0074】
変分式位相復元アルゴリズムは、データが複素非等方拡散アルゴリズムで前処理されるという事実を利用する。複素非等方拡散アルゴリズムは、不連続をなめらかにしないよう設計されている。結果として、位相復元に向けての変分アプローチは、データがまだ不連続であることを利用する。
【0075】
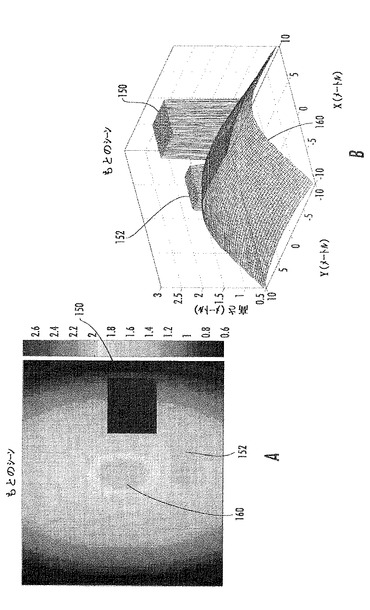
ここで、変分式位相復元について、図18〜図27に示されたプロットを参照して論じる。二つの建物150、152およびそれらの建物に隣接する対応する地面160のもとのシーンが図18のAおよびBにおいて与えられている。図18のBはSAR画像の三次元プロットであり、図18のAは同じSAR画像を上から見下ろした図である。もとのシーンでは、地面160は、建物152に近い高さの丘である。
【0076】
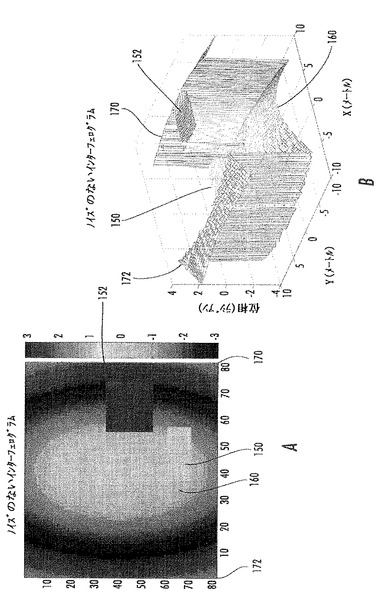
もとのシーンのまるめられたインターフェログラムが図19のAおよびBに示されている。インターフェログラムは複素オブジェクトなので、インターフェログラムを見ることができるようその位相が決定される。結果として、図19のBにおけるプロットの軸はラジアン単位である。各xおよびyピクセルについて、ある位相値があり、それがまるめられる。これは、範囲が常にプラス/マイナスπの間であるということを意味する。プラス/マイナスπの範囲のエッジはフリンジ線170および172である。
【0077】
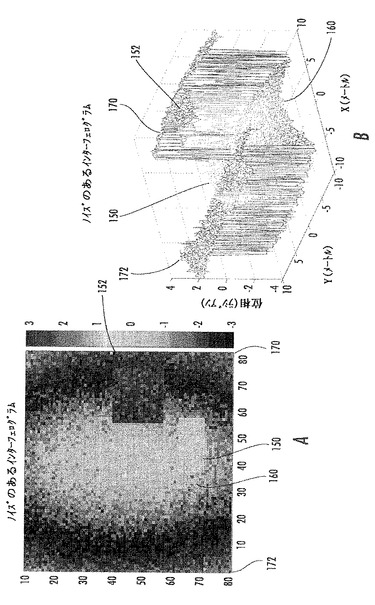
図19Bでは、丘160の中心が落とされている。位相差はいかなるノイズも含まない。このシーンに人工的にノイズが加えられて、図20のAおよびBに示されるように現実の収集データがシミュレートされる。図21のAおよびBでは、ノイズは平滑化フィルタの適用によって緩和されている。通常の平滑化アルゴリズムは不連続部もなめらかにする傾向があるので、フリンジ線170、172が平滑化されてしまっている。結果として、解像度が下がっている。複素非等方拡散インターフェログラムが図22のAおよびBに与えられている。フリンジ線170、172はより鮮鋭であり、建物のエッジが保存されている。
【0078】
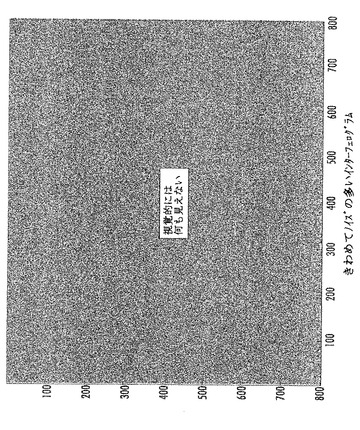
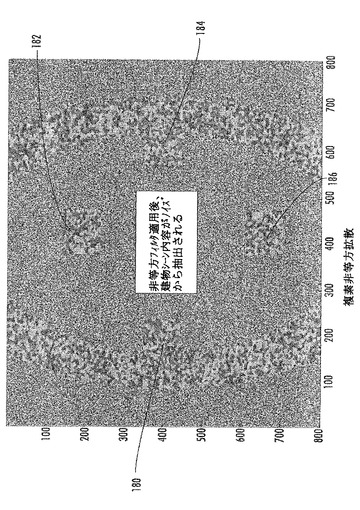
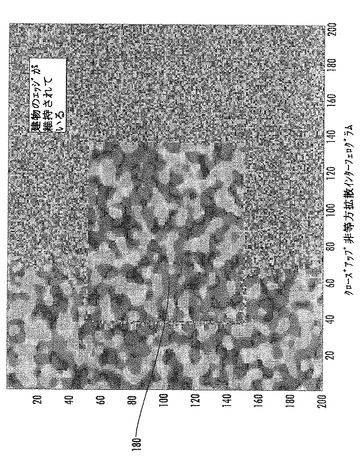
ここで、もう一組の例について、図23〜図27を参照して論じる。4つの建物180、182、184および186の上から見下ろした図が図23に示されている。各建物は、異なる陰影で示されているように、異なる高さである。図24にはノイズのないインターフェログラムが示される。プラス/マイナスπの間の位相まるめのため、4つの建物180、182、184および186は、同じ陰影で示されているように、同じ高さであるように見える。このインターフェログラムにノイズが加えられると、図25に示されるように、建物180、182、184および186はノイズによって隠されてしまう。本発明に基づく複素非等方拡散されたノイズのあるインターフェログラムが図26に示されている。複素非等方拡散アルゴリズムの適用後、建物180、182、184および186はノイズから抽出される。境界エッジが維持されている様子を示すため、建物180のクローズアップ図が図27に与えられている。
【0079】
図15のフローチャートに戻って参照すると、それぞれのSAR画像を提供する各SARの幾何構造がブロック134で推定される。対応する画像が撮られたときに各SARがどこに位置されていたかについて決定がなされる。第一のSARが所与の緯度/経度/高さを指していたとしたら、ピクセル値ならびにそのピクセルについての緯度/経度/高さがいくつであるかについて、高い信頼度がある。
【0080】
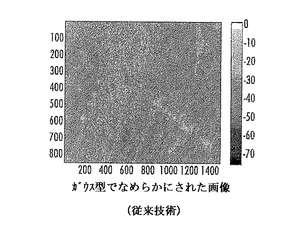
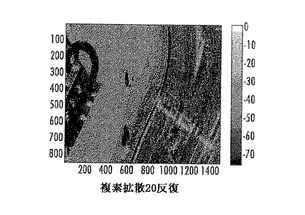
ラジアン単位での復元された位相は、ブロック136において高さに変換される。復元された位相測定が得られるとき、それはラジアン単位である。そこで、ラジアンから高さへの変換がなされる。当業者には容易に理解されるように、閉じた形の方程式がラジアン値を高さにする。高さは、二つのSAR画像の間の沈下を決定するための必要な測定値を提供する。例示の目的のため、もとの画像は図28に示され、もとの画像をガウス・フィルタでなめらかにしたものは図29に示され、もとの画像を複素非等方拡散アルゴリズムでフィルタ処理した20反復後のものが図30に示されている。二つの画像の間で、境界エッジは図30において、目に見えてより明瞭になっている。
【0081】
こうして、非等方拡散アルゴリズムによって、該アルゴリズムの属性のため、不連続が維持される。アルゴリズムは基本的に、勾配に対して作用する。よって、アルゴリズムは、厳密に画像の勾配に基づいて、なめらかにするか否かを知る。勾配が前もって設定されたノイズ閾値より低ければ、アルゴリズムは進み、勾配をなめらかにする。勾配が閾値を超えていれば、アルゴリズムは、対応する構造のエッジを維持または保存するために、勾配をなめらかにしない。上記のように、閾値は好ましくはシーンについての知識に基づいて設定される。
【0082】
変分式位相復元は、変分解析と呼ばれる誤差数学から派生する。変分解析の原理を使って、不連続を扱う位相復元アルゴリズムが考案される。現行の復元アルゴリズムはデータをなめらかにする傾向がある。対照的に、変分式位相復元アルゴリズムは、平滑化を制御するコスト関数に基づいている。データの属性に基づくグローバルな平滑化を与える代わりに、変分式位相復元アルゴリズムはエッジを無傷のままにし、エッジに隣接する領域を選択的になめらかにする。
【0083】
本発明のもう一つの側面は、SAR画像を圧縮および圧縮解除するときの非等方拡散アルゴリズムの適用である。SARデータ・セットは比較的大きくなることがあり、SARデータ・セットが圧縮されるとき、解像度は通例、そのプロセスの間に下げられる。これは、損失のある〔不可逆的な〕前処理圧縮方式の結果である。損失のある前処理アルゴリズムは、通例、シーン内の散乱体を劣化させる。さらに、データのボリュームは現行の処理機能を圧倒しうる。
【0084】
たいていの一般的な前処理アルゴリズムは、低域通過フィルタとして作用する。後続の圧縮方式は、データを通じて類似性を見出すような仕方でデータをグループ化しようと試みる:独立成分解析(ICA: independent component analysis)、ウェーブレット変換(ガボール・フィルタ)および平行性活用(parallelism exploitation)方式。SARデータの動的なレンジのため、データが良好にグループ化できるような仕方でデータを閾値処理することは難しい。
【0085】
SAR画像を圧縮するコンピュータ実装された方法は、圧縮されるべきSAR画像を受け取り、そのSAR画像に非等方拡散アルゴリズムを適用し、それに非等方拡散アルゴリズムを適用した後でSAR画像を圧縮することを含む。非等方拡散アルゴリズムを適用することの利点は、使用される圧縮方式に関わりなく、圧縮後のSAR画像のサイズがより小さなサイズのファイルを生じるということである。結果として、圧縮されたSAR画像の記憶および伝送はより少ないスペースおよびバンド幅を占有する。
【0086】
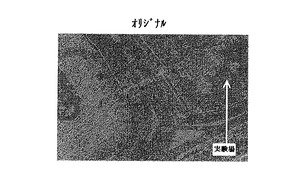
比較の目的のため、圧縮についての指標は図31に示されるもとのシーンに基づく。もとのシーンは未圧縮の691kBのTiffファイル・サイズをもつ。もとのシーンのJPEG圧縮はファイル・サイズを62kBに減らす。一方、もとのシーンのWinzip圧縮はファイル・サイズを41kBに減らす。
【0087】
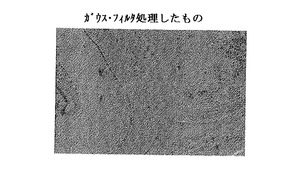
ガウス・フィルタを用いたもとのシーンのフィルタリングが図32に示されている。ガウス・フィルタリングされたもとの画像のJPEG圧縮はファイル・サイズを55kBに減らす。一方、ガウス・フィルタリングされたもとの画像のWinzip圧縮はファイル・サイズを33kBに減らす。
【0088】
本発明に基づき、非等方拡散アルゴリズムによるもとのシーンのフィルタリングが図33に示されている。非等方拡散されたフィルタリングされたシーンのサイズは、フィルタリングなしおよびガウス・フィルタリングされたもとのシーンと同じサイズのままである。非等方拡散されたシーンのJPEG圧縮は、ファイル・サイズを44kBに減らす。一方、非等方拡散されたシーンのWinzip圧縮はファイル・サイズを23kBに減らす。
【0089】
表1は、種々の画像を並べて見比べられるようにしたものである。SAR画像のどれでも非等方拡散が適用されたときは、非等方拡散アルゴリズムが適用されなかった場合よりも大きな圧縮が達成できる。非等方拡散フィルタリングされた画像は、16:1のJPEG圧縮、30:1のWinzip圧縮率をもつ。
【0090】
【表1】
圧縮解除する面では、圧縮解除は非等方拡散に基づいて実行される。より具体的には、SAR画像を圧縮解除するコンピュータ実装された方法は、圧縮解除されるべきSAR画像を受け取り、そのSAR画像に対してダイナミック・レンジ圧縮を実行し、それに非等方拡散アルゴリズムを適用することによって量子化された圧縮されたSAR画像を圧縮解除することを含む。量子化はたとえば単位8においてであってもよい。ダイナミック・レンジ圧縮は非線形プロセスである。
【0091】
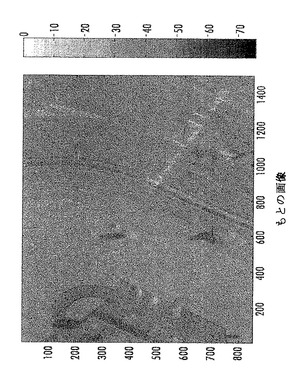
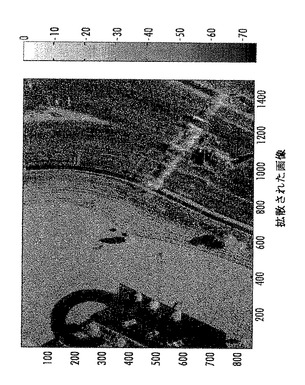
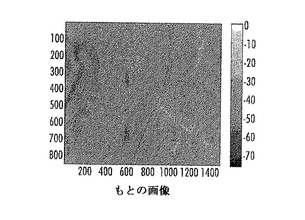
ここで圧縮解除を例解するために図34〜図36が参照される。圧縮解除されるべきもとの画像が図34に示されており、65.68MBの画像記憶サイズをもつ。非線形ダイナミック・レンジ圧縮が適用され、結果は、図35に示されるように、単位8において量子化される。画像記憶サイズは今や4.11MBである。量子化された画像において、樹木や影がよく定義されている。
【0092】
量子化された画像の非等方拡散アルゴリズムによる圧縮解除が図36に示されている。ここでは樹木および影が一層よく定義されている。閲覧されるSAR画像をさらに向上させるためにショック・フィルタが適用されてもよい。SARデータを動的に圧縮し、そのデータを量子化することによって、伝送の際に要求されるデータ量が著しく減らされる。平均して、これらのデータ・セットが伝送のために要求するのは、そのシーンのデータの4.11/65.7=6.25%である。ダイナミック・レンジが大きいほど、圧縮率も大きくなる。シーン内の非常に明るい散乱体については一層圧縮される。ユーザーが損失のある圧縮された/圧縮解除された画像を与えられたとしても、上記の圧縮/圧縮解除アプローチの適用は、閲覧のためのもとの画像の品質を実際に改善するであろう。
【0093】
ノイズのある画像およびSAR画像についての上で論じたような非等方拡散を使った高度抽出/位置合わせについてここで図37〜図44を参照して論じる。ノイズのあるデータは、相関、位置合わせ(同じセンサーまたはセンサー横断)および高度抽出の精度に影響する。現在のところ、ノイズのあるデータについては低域通過フィルタが使用される。SARデータについてはアポディゼーションが使用される。
【0094】
SAR画像を位置合わせするためのコンピュータ実装された方法は、位置合わせされるべき第一および第二のSAR画像を選択し、選択された第一および第二のSAR画像を非等方拡散アルゴリズムを用いて個々に処理し、該処理後に第一および第二のSAR画像を位置合わせすることを含む。位置合わせの前に、それぞれの第一および第二の処理されたSAR画像に対してショック・フィルタが適用されることが好ましい。次いで、位置合わせされたSAR画像に基づいて高度データが抽出されうる。
【0095】
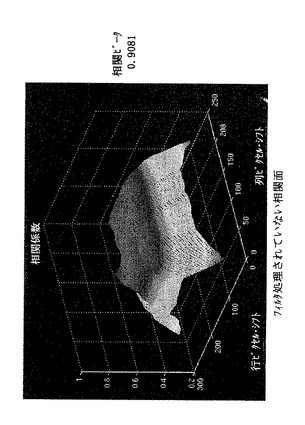
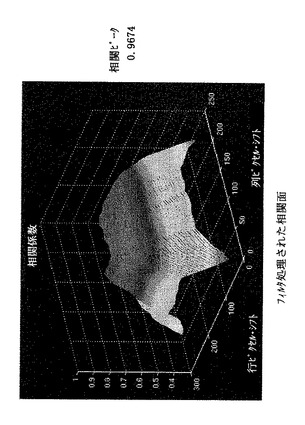
例示の目的のため、二つの位置合わせされていないSAR画像が図37および図38に示されている。位置合わせの際に非等方拡散アルゴリズムを使うことの利点について指標を得るために、基準である図37の画像1とサブ画像である図38の画像2との間の相関がある。それら二つの画像についての相関係数マップが決定される。相関マップの最大値、すなわちピークが得られる。相関マップ上でのピーク位置は、データ間のシフト、すなわち位置合わせされたシフトを示す。画像1のすべては画像2のすべてと相関される。相関の最大値が位置合わせ後に得られる。次いで画像は非等方拡散アルゴリズムを使ってフィルタ処理される。
【0096】
相関のピークは、図39に示されるように、フィルタ処理されていない相関表面における0.9081である。フィルタ処理後、相関のピークは図40に示されるように0.9674である。位置合わせが適用されたのち、図37および図38からの画像は、図41および図42に示されるように、動かない。これらの画像はフィルタ処理されていない。位置合わせのための相関ピークは0.9081であり、位置合わせ後の画像全体の事後相関は0.3634である。フィルタ処理後、対応する画像は図43〜図44に示されている。位置合わせのための相関は0.9674であり、位置合わせ後の画像全体の事後相関は0.8094である。位置合わせは9.4%改善され、相関は位置合わせ後に45%改善される。
【0097】
材料分類のための、非線形非等方拡散処理およびショック・フィルタを使ったベクトルおよび道路抽出について、ここで図45〜図48を参照して論じる。諸単独反射シーンの道路抽出に対する要求がある。現在のところ、平滑化カーネルがデータに適用される。形態学的フィルタもデータに適用される(膨張/収縮)。その際、ベクトル/道路抽出は、ガウス/ゼロ横断(Gaussian/zero crossing)フィルタを使って与えられうる。
【0098】
本発明によれば、SAR画像におけるベクトル抽出のためのコンピュータ実装された方法は、ベクトル抽出のためにSAR画像を選択し、選択されたSAR画像を非等方拡散アルゴリズムで処理し、処理されたSAR画像に基づいてベクトル・データを抽出することを含む。ショック・フィルタは、抽出の前に処理されたSAR画像に適用されうる。次いで道路画像データが、抽出されたベクトル・データに基づいて抽出されうる。
【0099】
データはこうして、非等方拡散アルゴリズムのコヒーレントなスキームを使って描出される。この方式は道路抽出のためのより高い精度を提供する。もとのシーンが図45に示されている。非等方拡散が適用されたのちには、図46に示されるように、ターゲットはよりよく定義される。一般に、ターゲットは、単独反射表面(single reflective surfaces)についてよりよく描出される。これは、セグメンテーションのために好都合である。
【0100】
非等方拡散アルゴリズムは、他のフィルタ型によってすでにフィルタ処理されたあとに他の画像に適用されてもよい。これらのフィルタ型は、たとえばプレウィット(Prewitt)・フィルタおよびロバーツ(Roberts)・フィルタを含む。プレウィット・フィルタによってフィルタ処理されたもとの画像が図47に示されている。図48は、非等方拡散アルゴリズムの適用後の同じ画像である。図示されているターゲットもチェーンリンク・フェンスもよりよく定義されている。
【技術分野】
【0001】
本発明は、画像処理の分野に、より詳細には合成開口レーダー(SAR: synthetic aperture radar)画像の処理に関する。
【背景技術】
【0002】
SARデータの解像度は電気光学(EO: electro-optical)データの解像度には匹敵しない。EOセンサーは、写真デバイスおよび光検出・測距(LIDAR[ライダー]: light detection and ranging)コレクタのような他の光学的撮像装置を含む。EOセンサーは、シーンからの光の反射率を捉えてその写真画像を提供するという意味で受動的である。しかしながら、EOセンサーは時刻および大気条件によって制限される。
【0003】
合成開口レーダー(SAR)は、昼でも夜でも、悪天候でも画像が取得できるという利点がある。SARは、SAR画像を生成するために無線周波(RF)信号からの後方散乱された放射を記録するという意味で能動的である。SARの各解像度セルは一般に多くの散乱体をもつ。これらの散乱体からの戻り信号の位相はランダムに分布され、結果として得られる干渉がスペックルを引き起こす。
【0004】
スペックルは、最終的に閲覧される検出された画像において粒状の外観を与え、このためEO画像と比べたときにより低い解像度となっている。スペックルはなされうる測定の精度に対して著しい制限を課す。たとえば、計量はしばしばSARデータにおいて包含的である。サイド・ローブ干渉もSARデータに対しノイズのある見かけを生成する。さらに、ハードウェア誤動作または電波干渉はSARデータの忠実度を低下させうる。
【0005】
SARデータは現在、メイン・ローブおよびサイド・ローブが除去される何らかの形のアポディゼーションを用いて処理されている。しかしながら、アポディゼーションはSARデータが二値に見えるようにする。これも、粒子状の外観をもつ検出画像につながる。SARデータはまた、テイラー重み付けのような低域通過フィルタを用いて処理されている。しかしながら、散乱体が一緒にぼかされてしまうことがあり、低下した解像度につながる。SARデータを処理するために使用される現行のアプローチの結果として、位置合わせ(registration)、道路検出、変化検出、高度抽出(elevation extraction)および計量(mensuration)を含むある種の解析応用が包含的(inclusive)であることができる。
【0006】
スペックルを含むSAR画像について、向上の目標は、重要な画像特徴を破壊することなくスペックルを除去することである。ピクセルの輝度は、解像度セル(resolution cell)における散乱体の属性によってのみならず、これらの散乱体からの戻りの間の位相関係によっても決定される。しかしながら、ある種の応用では、スペックルの除去は逆効果でありうる。スペックルの保持が重要である例は、特徴の検出がスペックル・パターンと同じスケールである場合である。SARデータからスペックル除去するとともに解像度を向上させるためのある既知の技法は、非等方拡散(anisotropic diffusion)アルゴリズムの適用である。
【0007】
SARデータをスペックル除去するための一つのアプローチは、Yuらによる「Speckle Reducing Anisotropic Diffusion」と題された論文において開示されている。スペックル除去のために偏微分方程式(PDE: partial differential equation)アプローチが使われる。具体的には、画像スケール空間が生成される。これは、細かいから粗いまで変わる、フィルタリングされた画像の集合である。もう一つのアプローチは、Xiらによる「Anisotropic Diffusion Despeckling For High Resolution SAR Images」と題された論文において開示されている。離散化スキーム、すなわち加法的演算子分割(AOS: additive operator splitting)スキームに基づく非線形拡散フィルタリング・アルゴリズムが離散画像データにおいて適用される。これらのアプローチのいずれも、ノイズを削減し、エッジを保持することによってSARデータの解像度を改善することにつながるが、いまだ、SARデータをより高解像度のEOデータのように見えさせる要求がある。
【発明の概要】
【発明が解決しようとする課題】
【0008】
以上の背景に鑑み、よりEOデータのように見えるようSARデータの解像度を改善することが本発明の目的である。
【課題を解決するための手段】
【0009】
本発明に基づくこのことおよびその他の目的、特徴および利点は、合成開口レーダー(SAR)画像を処理するためのコンピュータ実装された方法であって、処理されるべきSAR画像中のノイズを決定し、決定されたノイズに基づいてそのSAR画像についてのノイズ閾値を選択し、選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整することによって提供される。調整された非等方拡散アルゴリズムがSAR画像に適用される。
【0010】
ノイズは、SAR画像の勾配値の統計的解析に基づいて決定されてもよい。統計的解析は、たとえば勾配値の標準偏差に定数を加えたものに基づいていてもよい。あるいはまた、ノイズは、フーリエ・ウィンドウイング方式またはウェーブレット分解に基づいて決定されてもよい。
【0011】
非等方拡散アルゴリズムは、非定数項を含む熱伝導方程式(heat equation)に基づいていてもよい。非等方拡散アルゴリズムを数学的に調整することは、選択されたノイズ閾値に基づいてその非定数項を調整することを含んでいてもよい。非定数項を調整することによって、これは、熱伝導方程式が処理されているSARデータに合わせて調節されることを有利に許容する。結果として、所望される結果を得るためにあるクラスの関数が生成されることができる。ここで、各関数は処理されている特定のSARデータに対応する。複数の異質な(disparate)SARデータ・セットが、閲覧されるSAR画像の解像度を改善するよう、よりよく処理されることができる。
【0012】
本発明のもう一つの側面は、複素非等方拡散アルゴリズムに向けられる。上記の非等方拡散アルゴリズムのための方程式が複素データのために改めて導出され、それによりプロセスは今では非線形である。複素データを使うと、SARデータ・セットの実成分と虚成分が同時に処理される。SARデータ・セットの実成分と虚成分は複素オブジェクトとして扱われているので、複素非等方拡散アルゴリズムは、きわめてノイズの多いデータからシーン内容を引き出すことができ、それは今度は閲覧されるSAR画像の解像度を改善する。
【0013】
複素SAR画像を処理するためのコンピュータ実装される方法が、複数のピクセルを含むSAR画像のための複素SARデータ・セットを受け取り、複素非等方拡散アルゴリズムをその複素SARデータ・セットに適用することを含む。複素SARデータ・セットは各ピクセルについて実部および虚部を有する。複素SARデータ・セットが周波数空間で受け取られる場合、周波数空間は像空間に変換される。周波数空間は各ピクセルについての位相およびパワーに対応し、像空間は各ピクセルについての位相および振幅に対応する。
【0014】
複素非等方拡散アルゴリズムはまた、特にたとえば都市域における沈下測定のために、SARデータの干渉測定処理においても使用されうる。沈下とは、地表の高度が界面レベルに対して低下する地形変位である。
【0015】
干渉測定SAR画像(interferometric SAR image)を処理するコンピュータ実装された方法が、同じシーンの第一および第二の複素SARデータ・セットを受け取ることを含み、第二の複素SARデータ・セットは第一の複素SARデータ・セットに関して位相がオフセットされている。それぞれの複素SARデータ・セットは複数のピクセルを含みうる。第一および第二の複素SARデータ・セットに基づいてそれらの間の位相差を提供するためのインターフェログラムが形成される。複素非等方拡散アルゴリズムはそのインターフェログラムに適用され、ここで、インターフェログラムは各ピクセルについて実部および虚部をもつ。そのインターフェログラムにショック・フィルタ(shock filter)が適用される。
【0016】
複素非等方拡散アルゴリズムは、インターフェログラムにおいて、局所的にはノイズを緩和し、同時にシーン不連続は保持する。ショック・フィルタは画像のぼけ除去(deblurring)のために使われる。複素非等方アルゴリズムを介した非線形平滑化およびショック・フィルタを介した境界向上は、位相差測定の精度および品質を向上させる。沈下は、シーン中の持続的なオブジェクト(たとえば建物)を参照点として使って測定されるので、持続的なオブジェクトの境界品質を改善することは、沈下測定を改善する。
【0017】
本方法はさらに、ショック・フィルタの適用後にインターフェログラムに対して二次元変分式位相復元〔アンラッピング〕(variational phase unwrapping)を実行することを含みうる。二つの位置合わせされたSAR画像の間の位相差は、表面地勢のような関心のある所望の物理量に関係している。位相差は2Bを法としてのみ登録されることができ、現行の干渉測定技術は主として、離散値を使って登録された位相(ラッピングされた位相)から絶対位相(復元〔アンラッピング〕された位相)を回復し、それはデータをなめらかにする傾向をもつ。
【0018】
本発明に基づく変分式位相復元アルゴリズムは、平滑化を制御するためのコスト関数に基づいていてもよい。データの属性に基づいたグローバルな平滑化を提供する代わりに、変分式位相復元アルゴリズムはエッジには手をつけずにおき、エッジに隣接する領域を選択的になめらかにする。結果として、複素非等方拡散アルゴリズムに基づくSARデータの干渉測定処理、ショック・フィルタおよび変分式位相復元がまとまって境界品質を改善し、それが今度は沈下測定を改善する。
【0019】
非等方拡散アルゴリズムはまた、SAR画像を圧縮および圧縮解除することにおいて使用されてもよい。非等方拡散アルゴリズムを適用することの利点は、使用される圧縮方式にかかわらず、圧縮後のSAR画像のサイズがより小さなサイズのファイルを生じるということである。SAR画像を圧縮解除する面では、SARデータを動的に圧縮し、そのデータを量子化し、次いで非等方拡散アルゴリズムを用いて圧縮解除することによって、やはりより小さなサイズのファイルが達成される。ダイナミック・レンジが大きいほど、圧縮率はよくなる。結果として、非等方拡散アルゴリズムに基づいて圧縮されたおよび圧縮解除されたSAR画像の記憶および伝送は、より少ないスペースおよびバンド幅を占有する。
【0020】
非等方拡散アルゴリズムはまた、SAR画像のための高度抽出および位置合わせにおいても使用されうる。SAR画像を位置合わせするためのコンピュータ実装された方法は、位置合わせされるべき第一および第二のSAR画像を選択し、選択された第一および第二のSAR画像を非等方拡散アルゴリズムを用いて個々に処理し、その処理後、第一および第二のSAR画像を位置合わせすることを含む。本方法はさらに、位置合わせの前に、ショック・フィルタをそれぞれ第一および第二の処理されたSAR画像に適用することを含む。この方式は、SAR画像位置合わせについてより高い精度を提供し、それが今度は位置合わせされたSAR画像に基づいて高度データがよりよく抽出されることを許容する。
【0021】
非等方拡散アルゴリズムおよびショック・フィルタのさらにもう一つの応用は、材料分類のためのベクトルおよび道路抽出に関するものである。SAR画像におけるベクトル抽出のためのコンピュータ実装された方法は、ベクトル抽出のためにSAR画像を選択し、選択されたSAR画像を非等方拡散アルゴリズムで処理し、処理されたSAR画像に基づいてベクトル・データを抽出することを含む。ショック・フィルタは、抽出の前に処理されたSAR画像に適用されうる。次いで道路画像データが、抽出されたベクトル・データに基づいて抽出されうる。データはこうして、非等方拡散アルゴリズムのコヒーレントなスキームを使って線引きされる(delineated)。この方式は道路抽出のためのより高い精度を提供する。
【図面の簡単な説明】
【0022】
【図1】本発明に基づく、SAR画像の収集および処理の概略的なブロック図である。
【図2】本発明に基づく、SARデータ・セットについてピクセル強度の分布プロットである。
【図3】本発明に基づく、SARデータ・セットについて勾配値の分布プロットである。
【図4】図2および図3に示されたプロットに対応するSARデータ・セットの画像である。
【図5】図2および図3に示されたプロットに対応する勾配の画像である。
【図6】従来技術に基づく重み付け方式を用いて向上された勾配の画像である。
【図7】本発明に基づく非等方拡散アルゴリズムを用いて向上された、図6に示されたのと同じ画像勾配を示す図である。
【図8】本発明に基づくフィルタリング前のもとの画像である。
【図9】従来技術に基づくフィルタリング後の、図8に示されたもとの画像に対応する画像である。
【図10】従来技術に基づくフィルタリング後の、図8に示されたもとの画像に対応する画像である。
【図11】従来技術に基づくフィルタリング後の、図8に示されたもとの画像に対応する画像である。
【図12】本発明に基づく非等方拡散アルゴリズムを用いたフィルタリング後の、図8に示したもとの画像に対応する画像である。
【図13】本発明に基づく、フィルタリング前のもとの画像である。
【図14】本発明に基づく、複素非等方拡散アルゴリズムを用いたフィルタリング後の、図13に示されるもとの画像に対応する画像である。
【図15】本発明に基づく沈下測定のための干渉測定SARデータの非線形処理を示すフローチャートである。
【図16】本発明に基づくショック・フィルタの適用前の、もとの近接ベクトル多スペクトル画像である。
【図17】本発明に基づくショック・フィルタの適用後の、図16に示したもとの画像に対応する画像である。
【図18】AおよびBは、本発明に基づく干渉測定処理前の、もとのシーンの二次元および三次元画像である。
【図19】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図20】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図21】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図22】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図18のAおよびBに示されたもとのシーンに対応する二次元および三次元の画像である。
【図23】本発明に基づく干渉測定処理前のもとのシーンの、上から見下ろした二次元画像である。
【図24】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図25】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図26】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図27】本発明に基づく干渉測定SAR処理の適用のさまざまな段階の一つを例解する、図23に示されたもとのシーンに対応する、上から見下ろした二次元画像である。
【図28】本発明に基づいてフィルタリングされる前のもとの画像である。
【図29】従来技術に基づくガウシアン・フィルタの適用後の、図28に示されたもとの画像に対応する画像である。
【図30】本発明に基づく複素非等方拡散アルゴリズムを用いたフィルタリングの複数反復後の、図28に示されたもとの画像に対応する画像である。
【図31】本発明に基づくSARデータの圧縮を例示する画像である。
【図32】本発明に基づくSARデータの圧縮を例示する画像である。
【図33】本発明に基づくSARデータの圧縮を例示する画像である。
【図34】本発明に基づくSARデータの圧縮解除を例示する画像である。
【図35】本発明に基づくSARデータの圧縮解除を例示する画像である。
【図36】本発明に基づくSARデータの圧縮解除を例示する画像である。
【図37】本発明に基づくSARデータの位置合わせを例示する画像である。
【図38】本発明に基づくSARデータの位置合わせを例示する画像である。
【図39】本発明に基づくSARデータの位置合わせを例示するプロットである。
【図40】本発明に基づくSARデータの位置合わせを例示するプロットである。
【図41】本発明に基づくSARデータの位置合わせを例示する画像である。
【図42】本発明に基づくSARデータの位置合わせを例示する画像である。
【図43】本発明に基づくSARデータの位置合わせを例示する画像である。
【図44】本発明に基づくSARデータの位置合わせを例示する画像である。
【図45】本発明に基づく道路抽出を例示する画像である。
【図46】本発明に基づく道路抽出を例示する画像である。
【図47】本発明に基づく道路抽出を例示する画像である。
【図48】本発明に基づく道路抽出を例示する画像である。
【発明を実施するための形態】
【0023】
本発明について、これから以下で、本発明の好ましい実施形態が示されている付属の図面を参照してより詳細に述べる。しかしながら、本発明は数多くの形で具現されてもよく、ここで述べられる実施形態に限定されると解釈されるべきではない。むしろ、これらの実施形態は、本開示が十全かつ完備であり本発明の範囲を当業者に十二分に伝達するよう提供されている。同様の符号は全体を通じて同様の要素を指す。
【0024】
まず図1を参照すると、合成開口レーダー(SAR)50はSARデータを収集し、コンピュータ実装されたシステム60がそのSARデータを処理する。SAR50は航空機のような飛行プラットフォーム52によって関心のある領域上空に担持される。飛行プラットフォーム52は宇宙ベースであってもよい。
【0025】
図示した関心領域は、いくつかの建物54を含む、都市のような市街地である。この市街地には樹木56および道路58のような、たとえば建物54と比べて比較的小さな特徴も含まれている。あるいはまた、関心領域は、建物54が全くではないまでもほとんどない地方の領域であってもよい。
【0026】
当業者は、SAR画像がまず、閲覧のために実数値に変換される前に複素数値として受け取られることを認識するであろう。SAR画像は最初に、位相およびパワーを含むk空間において受け取られる。k空間での戻りデータの逆フーリエ変換を取ることによって、像空間が生成される。像空間は位相および振幅を含む。像空間は位相および振幅の情報を含むので、スペックルを被る。SAR画像を見るためには、像空間中のデータの絶対値を取ることによって、像空間から位相が除去される。これが、閲覧用の、検出されたまたは実画像を生成する。
【0027】
ひとたびSAR画像が収集されると、それらの画像は、たとえばコンピュータ62への搬送のために、磁気ディスクのような記憶媒体70上に記憶されてもよい。コンピュータ62内で、SAR画像は、処理されるべきSAR画像のデータベースの一部として記憶されてもよい。もちろん、SARデータを搬送するための他の好適な方法が使用されてもよい。そのことは当業者は容易に認識するであろう。収集されたSAR画像は複素数値または実数値でありうる。
【0028】
処理後にSAR画像を閲覧するためにディスプレイ64がコンピュータ62に接続されている。キーボード66およびマウス68のような入力装置もコンピュータ62に接続されている。本発明によれば、コンピュータ62はSAR画像を処理するためのプロセッサ68を含む。
【0029】
よりEOデータのように見えるようSARデータの解像度を改善するための一つの側面は、二階線形偏微分方程式である熱伝導方程式を修正することに基づく。熱伝導方程式は:
【数1】
のようになっている。
【0030】
ある種の条件のもとでは、熱伝導方程式の基本解はガウス密度関数である。熱伝導方程式は:
【数2】
と書ける。
【0031】
変数cは対流関数(convection function)として知られており、tは時間に対応し、xおよびyは収集されたSARデータに基づく複素数を形成する。本発明によれば、変数cは定数値ではない。これは有利なことに、cが定数値でないので、熱伝導方程式が処理されているSARデータに合わせて調整されることを許容する。
【0032】
結果として、所望される結果を得るためにあるクラスの関数が生成されることができる。ここで、各関数は処理されている特定のSARデータに対応する。市街域内では、一つのSARデータ・セット内の散乱体は他のSARデータ・セット内の散乱体とは異なり、それぞれのSARデータ・セットが異質であることがありうる。
【0033】
SARデータ・セットどうしが似ていないので、同じ関数(たとえば非等方拡散アルゴリズム)の適用は、より密接にその関数にマッチしているほうのSARデータ・セットの解像度を改善する結果となる。その関数に密接にマッチしていない他方のSARデータ・セットについては、その解像度は、より密接にマッチした関数が使われたとした場合ほど良好ではないであろう。同じことは、地方の領域からのデータ・セットについても言える。
【0034】
個別のSARデータ・セットによりよくマッチするよう対流関数cを変えることによって、cが定数値であった場合よりも、閲覧のための対応する実数値画像がよりよい解像度をもつことになる。対流関数cが定数値であるときには、異質なSARデータ・セットが等しく扱われる。一定でないcは、非等方拡散アルゴリズムがSARデータ・セットを、同時にぼかしかつ鮮鋭化することを許容する。対流関数cを介して熱伝導方程式を数学的に調節することによって、複数の異質なSARデータ・セットがよりよく処理される。
【0035】
熱伝導方程式を数学的に調節するために、SARデータ・セットにおけるノイズが決定される必要がある。ノイズを判別する一つのアプローチは、処理されるべき各SARデータ・セットにおける勾配値についての統計を集めることに基づく。統計は、実際のSARデータ・セットそのものについて集められることもできるし、あるいはすでに処理された類似のSARデータ・セットに基づいてあらかじめ決定されていてもよい。ノイズを判別するための他のアプローチは、フーリエ・ウィンドウイング方式またはウェーブレット分解を含む。このことは当業者は容易に理解するであろう。
【0036】
統計的解析に基づくSARデータ・セットにおけるノイズの計算を例解するために、図2〜図4を参照する。ノイズの計算は、そのSARデータ・セットに適用されるべき非等方拡散アルゴリズム内の対流関数cを数学的に調節するために使われる。SARデータ・セットについてのピクセル強度の分布が図2に与えられている。一方、これらのピクセルについての勾配値の分布が図3に与えられている。勾配値の分布は、同じ値にある勾配値の数である。たとえば、12×104でピークになっているスパイク100は、その同じ値である120,000個の勾配があるということを意味する。
【0037】
ノイズについての統計を集めることは、勾配値の標準偏差に基づいていてもよい。ひとたび標準偏差が決定されると、標準偏差の整数倍に所定の定数を加えてノイズ閾値kを得てもよい。ひとたびそのSARデータ・セットについてノイズ閾値kが決定されると、対応する非等方拡散アルゴリズムが適用されて、kの右側の値をなめらかにする一方、kの左側の値はなめらかにしない。kの左側の値をなめらかにしないことによって、シーン内のエッジが保存される。
【0038】
図3における勾配値の例示された分布についての標準偏差は、参照符号102に対応する線によって示されている。閾値kは、標準偏差の2倍にある定数を加えたものとして設定される。所望される閾値kを選択するには、このアプローチの変形や他の統計的アプローチが使用されてもよい。このことは当業者は容易に認識するであろう。
【0039】
閾値kはk値として知られている。高い勾配値は、不変のままとなるべき明るい散乱体に対応する。したがって、k値は、明るい散乱体をぼかすことなく設定される。対照的に、同じように見える勾配値はなめらかにされる。閾値kを調節することによって、処理されているSARデータ・セットに固有の所望される結果を生成するために、異なる複数のクラスの関数が使用されることができる。ノイズ閾値kを介して対流関数cを調節することの利点は、エンドユーザーが複数の非等方拡散アルゴリズムのうちから、そのSARデータ・セットを処理するためにより好適なものを選択する必要がないということである。その代わり、この選択は、ひとたびノイズ閾値kが選択されたら自律的になされる。
【0040】
図2および図3におけるピクセル強度および勾配値の分布は、図4に示された画像および図5に示された勾配の画像に対応する。これら二つの画像は非常に似通っている。各画像は、その画像を閲覧するための強度の量を表すdBスケール110を含む。
【0041】
図6において表示されている勾配の画像については、たとえばテイラー重み付けのような従来式の重み付け方式が、SARデータ・セットの処理の際に適用されている。図示されたキャプションは、建物のエッジが明瞭でなく、樹木や影も簡単に判別できないことを指摘している。
【0042】
図7では、SARデータ・セットについてのノイズ閾値kが、上で論じたように勾配値の分布の統計的解析に基づいて設定されている。スマート・フィルタと称してもよいであろう調整されたフィルタリングは、どこで平滑化が実行されるべきかを調節することによって、処理されているSARデータによりよくマッチする。結果として、図示されたキャプションは、建物のエッジがより明瞭であり、樹木および影がより明瞭であることを指摘している。これはよりよい計量のために有利である。
【0043】
ここで、異なる複数のフィルタリング方式を使った同じシーンの比較を、図8〜図12を参照して論じる。関心のあるさまざまな散乱体は、各図において丸で囲まれている。いかなるフィルタリングも適用する前のもとのシーンが図8に示されている。図9では、もとのシーンのフィルタリングが9のグリッド・ウィンドウに基づいている。3×3のピクセルからなる各群が平均され、これがSARデータ・セット内の全ピクセルについて繰り返される。標準的なガウス・フィルタが図10に示すようにもとのシーンに適用され、標準的な非等方拡散アルゴリズムが図11に示すようにもとのシーンに適用される。
【0044】
散乱体の成分には手をつけずにもとのシーンにおける散乱体のまわりのノイズをよりよく除去するために、SARデータ・セット内のノイズがまず判別される。選択されたノイズ閾値kに基づいて、非等方拡散アルゴリズムがしかるべく調節されて、図12に示すようにより高い解像度の画像を提供する。
【0045】
非等方拡散アルゴリズムは図11ではシーンに適用されているが、散乱体はいまだ、その周囲にマルチバウンス(multi-bounce)として知られるものをもっている。マルチバウンスでは、波が散乱体に当たり、地面と連絡をもち、その結果、散乱体のまわりじゅうでバウンスする。マルチバウンスはノイズのように見えるが、いくつかの状況では、散乱体についての有用な情報を明かすことがある。図12では、対流関数cは、マルチバウンスが除去されるよう選択されている。
【0046】
処理されているSARデータ・セットについての勾配値の分布の統計的解析に基づいて選択的に対流関数cを制御することの利点は、増加した解像度を提供する。領域内平滑化およびエッジ保存が、加法的ノイズによって損なわれた画像について提供される。SARデータ・セットがスペックルを含む場合には、調節可能な対流関数cをもつ非等方拡散アルゴリズムがエッジに敏感なスペックル制限を生じる。
【0047】
SARデータ・セットの全体的な忠実度を改善するためのハードウェアおよび/またはソフトウェアを使って、選択的に制御された対流関数cは生の複素データ(すなわち、実成分および虚成分)ならびに検出された画像(すなわち実成分のみ)に対して有利に適用されることができる。これはまた、処理されているSARデータ・セットについてのノイズ閾値の選択に基づいて自律的になされることもできる。こうして、高解像度のEOのようなシーンがSARデータ・セットから生成されることができる。SARデータ・セットにおいてノイズを除去しかつ似たようなデータ領域をなめらかにすることを同時に行うことによって、高周波データが保存される。結果として、情報テクスチャーおよび線状構造が保存される。これは、EOデータとSARデータの間での、より高精度の評価を提供する。
【0048】
本発明のもう一つの側面は、複素非等方拡散アルゴリズムに向けられる。上で論じたような非等方拡散アルゴリズムのための方程式は、複素データのために導出し直され、それにより、プロセスは今では非線形となる。複素データを使うと、SARデータ・セットの実成分と虚成分が同時に処理される。
【0049】
対照的に、非等方拡散アルゴリズムが複素SARデータに適用されたとしても、これまでは線形な仕方でなされてきた。これは、複素SARデータの実成分と虚成分が別個に処理されて次いで結果が組み合わされるということを意味する。
【0050】
複素非等方拡散アルゴリズムのための導出し直された方程式は次のようになる:
【数3】
SARデータ・セットの実成分および虚成分は複素オブジェクトとして扱われているので、複素非等方拡散アルゴリズムは、非常にノイズの多いデータからシーン内容を引き出すことができ、これは今度は閲覧される画像の解像度を改善する。
【0051】
比較として、図13に示されるもとの画像が参照される。図13におけるもとのSAR画像に対応するSARデータ・セットに複素非等方拡散が適用され、図14に示される拡散された画像を提供する。拡散された画像では、境界および特徴が、目に見えて鮮鋭になっている。
【0052】
複素非等方拡散アルゴリズムが単一画像SARデータ・セットに適用されることに加えて、複素非等方拡散アルゴリズムは干渉測定処理(interferometric processing)に適用されてもよい。具体的には、市街地シーンについての沈下測定のための干渉測定処理が、本複素非等方拡散アルゴリズムを使うときに特に有益である。
【0053】
SARデータの干渉測定処理についてこれからより詳細に論じる。図15のフローチャートを参照すると、市街地における沈下測定のためのSARデータの干渉測定処理は、図示された例のように論じられる。沈下とは、海水面を基準として大地の表面の高度が低下する地勢変位である。
【0054】
位相履歴をトリムするブロック120において、SAR画像が受け取られる。議論のため、二つのSAR画像が比較されている。二つのSAR画像は同じシーンのものだが、両画像は互いからわずかにオフセットされている。このことは当業者は容易に認識するであろう。それらのSAR画像が生データとして受け取られる場合、それらのSAR画像は周波数空間から像空間に変換される。周波数空間は位相およびパワーに対応し、像空間は位相および振幅に対応する。SAR画像における各ピクセルについての位相および振幅は、処理されるべき複素SARデータについての実成分および虚成分を与える。
【0055】
位相履歴をトリムするブロック120は、非常に高レベルでは、二つのSAR画像が干渉測定処理のために好適であることを確実にする。周波数空間におけるそれぞれの位相履歴の共通部分(intersection)が二つのSAR画像の間で選択され、他のすべては破棄される。二つのSAR画像はブロック122で位置合わせされる。位置合わせは、二つのSAR画像の間の特徴が揃っていることを確実にする。たとえば、第一のSAR画像における所与の緯度/経度/高さでの建物の隅が、第二のSAR画像における同じ緯度/経度/高さに対応するよう位置合わせされる。結果として、それら二つのSAR画像の間でピクセルが整列させられる。
【0056】
ブロック124ではインターフェログラムが使用される。第一のSAR画像は第二のSAR画像の複素共役を乗算される。結果は、二つのSAR画像の間の位相差である。結果として得られるインターフェログラムは直接、高さに関係する。インターフェログラムにおいて、各ピクセルについての位相は、その虚部をその実部で除算したものの逆正接(arctan)を取ることによって得られる。第一のSAR画像について、各ピクセルについての位相データが決定される。同様に、第二のSAR画像について各ピクセルについての位相データが決定される。のちに詳細に論じるように、このインターフェログラムの、各ピクセルについての位相データは、マイナスπとプラスπの間で変動する。結果として、位相はまるめられる。
【0057】
次に、インターフェログラムをなめらかにするために低域通過フィルタが通常なら適用される。しかしながら、これはシーンにおけるエッジをぼかす傾向がある。地方のシーンについてはぼけも受け容れ可能であるが、特定のランドマークにおける沈下が測定されている市街シーンについては、ぼけは、測定された沈下の精度に影響するので、望ましくない。
【0058】
低域通過フィルタの代わりに、上で論じた複素非等方拡散アルゴリズムがブロック126において適用され、ショック・フィルタがブロック128において適用される。複素非等方拡散アルゴリズムでは、各ピクセルの実部と虚部が複素オブジェクトとして処理される。すなわち、非線形処理である。対照的に、線形処理は実部と虚部を別個に処理し、次いでそれらの結果を組み合わせることに関わる。複素非等方拡散アルゴリズムは局所的にはノイズを緩和し、同時に一方ではインターフェログラムにおけるシーン不連続部を保存する。
【0059】
ショック・フィルタは、当業者には容易に理解されるように、画像のぼけ除去のために使われる。換言すれば、シーン内の境界が、数理形態学(mathematical morphology)を使って向上される。ショック・フィルタに対応する方程式は
【数4】
となる。
【0060】
このショック方程式は、非線形の双曲線型微分方程式である。方程式の第一の部分は、ラプラシアンによって決定される収縮(erosion)/膨張(dilation)に対応する。方程式の第二の部分は勾配の絶対値である。ショック・フィルタの適用を例解するため、もとの近接(close)ベクトル多スペクトル画像が図16に示され、この画像へのショック・フィルタの適用が図17に示される。境界は、ショック・フィルタの適用後は目に見えて鮮鋭になっている。
【0061】
複素非等方アルゴリズムによる非線形平滑化およびショック・フィルタによる境界向上は、位相差測定の精度および品質を高める。沈下はシーン内の持続的なオブジェクト(すなわち建物)を参照点として使って測定されるので、持続的オブジェクトの境界品質の改善は、沈下測定を改善する。
【0062】
位相はプラスπからマイナスπまでの間でしか変動できないので、まるめられた位相(wrapped phase)と呼ばれる。二つのSAR画像の間の位相において曖昧まるめ(ambiguity wrap)がなければ、沈降はブロック130において測定されることができる。しかしながら、典型的にはそうであるように曖昧まるめが存在する場合には、ブロック132において変分式位相復元が実行される。
【0063】
変分式位相復元は、位置合わせされた第一および第二のSAR画像の間の位相差であるインターフェログラムに適用される。二つの位置合わせされたSAR画像の間の位相差は、表面地勢のような、所望される関心のある物理量に関係する。位相差は、2Bを法としてのみ位置合わせされることができ、現行の干渉測定技法は主として、離散値を使って、位置合わせされた位相(まるめられた位相)から絶対的な位相(復元された位相)を回復する。現行の位相復元は、たとえば、残差カット・ツリー(residue-cut tree)アルゴリズムおよび最小二乗アルゴリズムによって実行されうる。
【0064】
位相復元を実行するためには、実部および虚部をもつ複素オブジェクトであるインターフェログラムから位相が決定される。実部分の虚部の逆正接がそれぞれの位相を与える。振幅は破棄され、位相が残される。
【0065】
位相はプラスπからマイナスπまでの間でのみ変動できるので、まるめられた位相と呼ばれるが、現実には、位相はプラス無限大からマイナス無限大までになりうる。ここが、干渉測定プロセスにおける困難なところである。
【0066】
目標は、プラス/マイナスπの空間からプラス/マイナス無限大のスペースに行くための適正なマッピングを決定することである。しかしながら、有限画像は、シーン内の最も高いオブジェクトの高さによって制限される。最も高い建物が800フィートであれば、差は地上レベルと800フィートに基づく。理論上は、プラス/マイナス無限大は数学的には正しいが、現実には変動は0からシーン内で最も高いオブジェクトの高さまでの間である。
【0067】
変分式位相復元は、データ内の非線形性および不連続を扱う。二つのSAR画像の間の位相差を取る前のプラス/マイナスπの境界での位相まるめにおいて曖昧さが存在する。位相がまるめられる点はフリンジ線として知られる。
【0068】
変分式位相復元アルゴリズムは二次元である。一次元の位相復元技法は、沈下問題に特に適用される要件を使って二次元のために導出し直されることができる。利用可能な他の二次元位相復元技法を仕立てることもできる。
【0069】
画像解析において、セグメンテーションは、デジタル画像を何らかの基準に従って複数の領域(ピクセルの集合)に分割することである。セグメンテーションの目標は典型的には関心のあるオブジェクトを位置特定することである。セグメンテーションのためのいくつかの一般的な技法は、閾値処理(thresholding)、領域成長法(region-growing)および接続成分ラベル付け(connect-component labeling)を含む。能動輪郭法(active contours)も一般的な方法である。
【0070】
変分式位相復元アルゴリズムは、下記のようなマムフォード・シャー(Mumford-Shah)関数またはコスト関数に基づく。
【0071】
【数5】
この式は、どのfおよびCが復元された位相を提供するかを決定する。第1項は、Cに沿った不連続をもつg(画像)に対するfという区分的になめらかな近似である。式のこの部分は、fの品質の尺度となるデータ忠実度の項と考えてもよい。方程式の第2項はなめらかさの項である。これは、Cが与えられたときのfについての事前モデルと見なしてもよい。第3項はCの長さに対応する。通常、長すぎる弧長についてはペナルティがある。もとのマムフォード・シャー関数またはコスト関数は、より一般的な不連続の集合のためのハウスドルフ側度を使っていた。本発明によれば、Cは、弧長によって置き換えられるために、なめらかな曲線に制約されている。
【0072】
マムフォード・シャー関数またはコスト関数を最小化するため、フリンジ線の間のデータの不連続によりよく対処するよう新しいコスト関数が開発される。新しいコスト関数は
【数6】
というものである。
【0073】
第1項はまるめられた位相と復元された位相との間の勾配を表す。第2項は、処理されるべきシーンについての事前の知識を表す。第3項は、処理されないインターフェログラムの最大フリンジ長に対して制限を課す。たいていの位相復元アルゴリズムはなめらかなデータに対して機能する。コスト関数E(f,C)についての最小解を決定したのち、偏微分方程式(PDE)に変換がなされる。PDEは次いで解かれる。
【0074】
変分式位相復元アルゴリズムは、データが複素非等方拡散アルゴリズムで前処理されるという事実を利用する。複素非等方拡散アルゴリズムは、不連続をなめらかにしないよう設計されている。結果として、位相復元に向けての変分アプローチは、データがまだ不連続であることを利用する。
【0075】
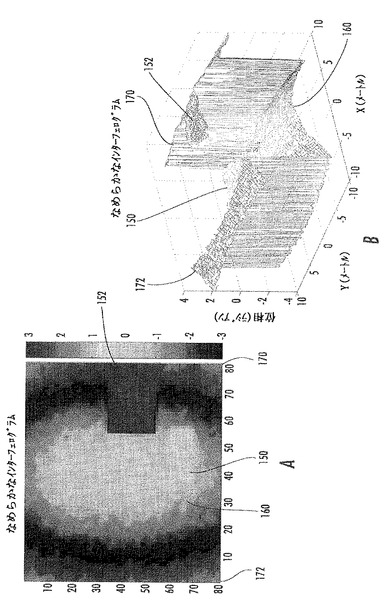
ここで、変分式位相復元について、図18〜図27に示されたプロットを参照して論じる。二つの建物150、152およびそれらの建物に隣接する対応する地面160のもとのシーンが図18のAおよびBにおいて与えられている。図18のBはSAR画像の三次元プロットであり、図18のAは同じSAR画像を上から見下ろした図である。もとのシーンでは、地面160は、建物152に近い高さの丘である。
【0076】
もとのシーンのまるめられたインターフェログラムが図19のAおよびBに示されている。インターフェログラムは複素オブジェクトなので、インターフェログラムを見ることができるようその位相が決定される。結果として、図19のBにおけるプロットの軸はラジアン単位である。各xおよびyピクセルについて、ある位相値があり、それがまるめられる。これは、範囲が常にプラス/マイナスπの間であるということを意味する。プラス/マイナスπの範囲のエッジはフリンジ線170および172である。
【0077】
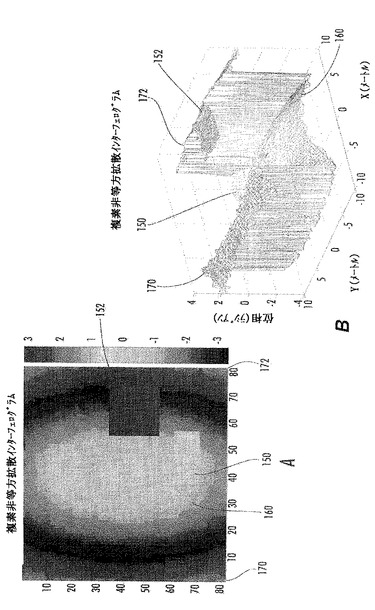
図19Bでは、丘160の中心が落とされている。位相差はいかなるノイズも含まない。このシーンに人工的にノイズが加えられて、図20のAおよびBに示されるように現実の収集データがシミュレートされる。図21のAおよびBでは、ノイズは平滑化フィルタの適用によって緩和されている。通常の平滑化アルゴリズムは不連続部もなめらかにする傾向があるので、フリンジ線170、172が平滑化されてしまっている。結果として、解像度が下がっている。複素非等方拡散インターフェログラムが図22のAおよびBに与えられている。フリンジ線170、172はより鮮鋭であり、建物のエッジが保存されている。
【0078】
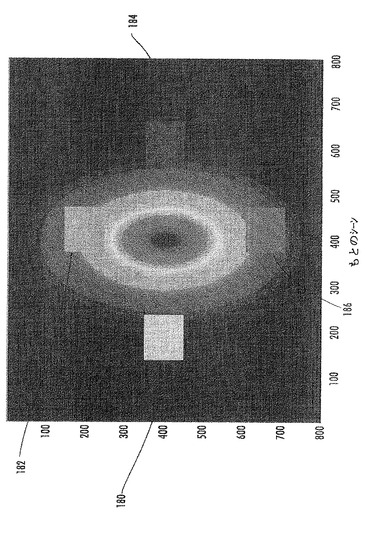
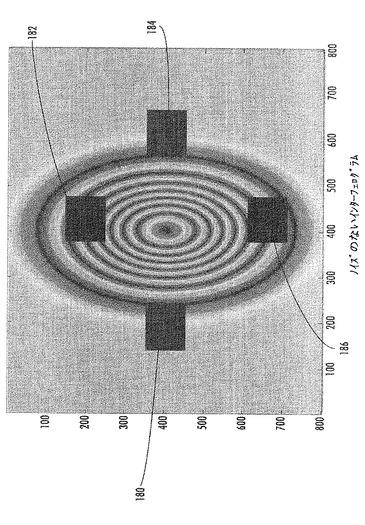
ここで、もう一組の例について、図23〜図27を参照して論じる。4つの建物180、182、184および186の上から見下ろした図が図23に示されている。各建物は、異なる陰影で示されているように、異なる高さである。図24にはノイズのないインターフェログラムが示される。プラス/マイナスπの間の位相まるめのため、4つの建物180、182、184および186は、同じ陰影で示されているように、同じ高さであるように見える。このインターフェログラムにノイズが加えられると、図25に示されるように、建物180、182、184および186はノイズによって隠されてしまう。本発明に基づく複素非等方拡散されたノイズのあるインターフェログラムが図26に示されている。複素非等方拡散アルゴリズムの適用後、建物180、182、184および186はノイズから抽出される。境界エッジが維持されている様子を示すため、建物180のクローズアップ図が図27に与えられている。
【0079】
図15のフローチャートに戻って参照すると、それぞれのSAR画像を提供する各SARの幾何構造がブロック134で推定される。対応する画像が撮られたときに各SARがどこに位置されていたかについて決定がなされる。第一のSARが所与の緯度/経度/高さを指していたとしたら、ピクセル値ならびにそのピクセルについての緯度/経度/高さがいくつであるかについて、高い信頼度がある。
【0080】
ラジアン単位での復元された位相は、ブロック136において高さに変換される。復元された位相測定が得られるとき、それはラジアン単位である。そこで、ラジアンから高さへの変換がなされる。当業者には容易に理解されるように、閉じた形の方程式がラジアン値を高さにする。高さは、二つのSAR画像の間の沈下を決定するための必要な測定値を提供する。例示の目的のため、もとの画像は図28に示され、もとの画像をガウス・フィルタでなめらかにしたものは図29に示され、もとの画像を複素非等方拡散アルゴリズムでフィルタ処理した20反復後のものが図30に示されている。二つの画像の間で、境界エッジは図30において、目に見えてより明瞭になっている。
【0081】
こうして、非等方拡散アルゴリズムによって、該アルゴリズムの属性のため、不連続が維持される。アルゴリズムは基本的に、勾配に対して作用する。よって、アルゴリズムは、厳密に画像の勾配に基づいて、なめらかにするか否かを知る。勾配が前もって設定されたノイズ閾値より低ければ、アルゴリズムは進み、勾配をなめらかにする。勾配が閾値を超えていれば、アルゴリズムは、対応する構造のエッジを維持または保存するために、勾配をなめらかにしない。上記のように、閾値は好ましくはシーンについての知識に基づいて設定される。
【0082】
変分式位相復元は、変分解析と呼ばれる誤差数学から派生する。変分解析の原理を使って、不連続を扱う位相復元アルゴリズムが考案される。現行の復元アルゴリズムはデータをなめらかにする傾向がある。対照的に、変分式位相復元アルゴリズムは、平滑化を制御するコスト関数に基づいている。データの属性に基づくグローバルな平滑化を与える代わりに、変分式位相復元アルゴリズムはエッジを無傷のままにし、エッジに隣接する領域を選択的になめらかにする。
【0083】
本発明のもう一つの側面は、SAR画像を圧縮および圧縮解除するときの非等方拡散アルゴリズムの適用である。SARデータ・セットは比較的大きくなることがあり、SARデータ・セットが圧縮されるとき、解像度は通例、そのプロセスの間に下げられる。これは、損失のある〔不可逆的な〕前処理圧縮方式の結果である。損失のある前処理アルゴリズムは、通例、シーン内の散乱体を劣化させる。さらに、データのボリュームは現行の処理機能を圧倒しうる。
【0084】
たいていの一般的な前処理アルゴリズムは、低域通過フィルタとして作用する。後続の圧縮方式は、データを通じて類似性を見出すような仕方でデータをグループ化しようと試みる:独立成分解析(ICA: independent component analysis)、ウェーブレット変換(ガボール・フィルタ)および平行性活用(parallelism exploitation)方式。SARデータの動的なレンジのため、データが良好にグループ化できるような仕方でデータを閾値処理することは難しい。
【0085】
SAR画像を圧縮するコンピュータ実装された方法は、圧縮されるべきSAR画像を受け取り、そのSAR画像に非等方拡散アルゴリズムを適用し、それに非等方拡散アルゴリズムを適用した後でSAR画像を圧縮することを含む。非等方拡散アルゴリズムを適用することの利点は、使用される圧縮方式に関わりなく、圧縮後のSAR画像のサイズがより小さなサイズのファイルを生じるということである。結果として、圧縮されたSAR画像の記憶および伝送はより少ないスペースおよびバンド幅を占有する。
【0086】
比較の目的のため、圧縮についての指標は図31に示されるもとのシーンに基づく。もとのシーンは未圧縮の691kBのTiffファイル・サイズをもつ。もとのシーンのJPEG圧縮はファイル・サイズを62kBに減らす。一方、もとのシーンのWinzip圧縮はファイル・サイズを41kBに減らす。
【0087】
ガウス・フィルタを用いたもとのシーンのフィルタリングが図32に示されている。ガウス・フィルタリングされたもとの画像のJPEG圧縮はファイル・サイズを55kBに減らす。一方、ガウス・フィルタリングされたもとの画像のWinzip圧縮はファイル・サイズを33kBに減らす。
【0088】
本発明に基づき、非等方拡散アルゴリズムによるもとのシーンのフィルタリングが図33に示されている。非等方拡散されたフィルタリングされたシーンのサイズは、フィルタリングなしおよびガウス・フィルタリングされたもとのシーンと同じサイズのままである。非等方拡散されたシーンのJPEG圧縮は、ファイル・サイズを44kBに減らす。一方、非等方拡散されたシーンのWinzip圧縮はファイル・サイズを23kBに減らす。
【0089】
表1は、種々の画像を並べて見比べられるようにしたものである。SAR画像のどれでも非等方拡散が適用されたときは、非等方拡散アルゴリズムが適用されなかった場合よりも大きな圧縮が達成できる。非等方拡散フィルタリングされた画像は、16:1のJPEG圧縮、30:1のWinzip圧縮率をもつ。
【0090】
【表1】
圧縮解除する面では、圧縮解除は非等方拡散に基づいて実行される。より具体的には、SAR画像を圧縮解除するコンピュータ実装された方法は、圧縮解除されるべきSAR画像を受け取り、そのSAR画像に対してダイナミック・レンジ圧縮を実行し、それに非等方拡散アルゴリズムを適用することによって量子化された圧縮されたSAR画像を圧縮解除することを含む。量子化はたとえば単位8においてであってもよい。ダイナミック・レンジ圧縮は非線形プロセスである。
【0091】
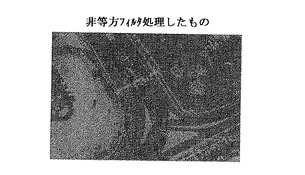
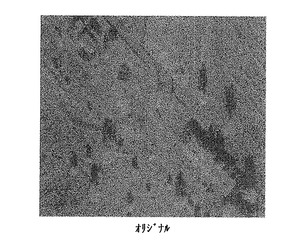
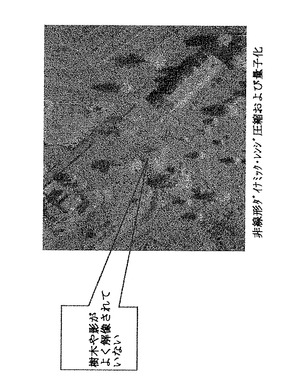
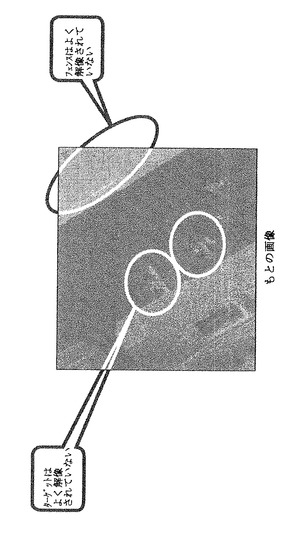
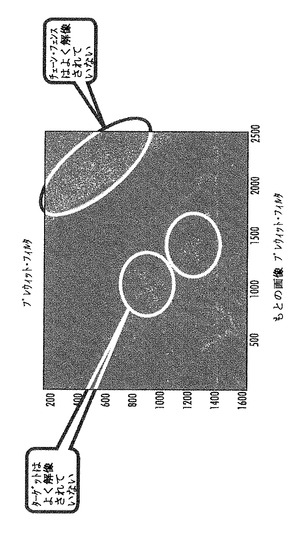
ここで圧縮解除を例解するために図34〜図36が参照される。圧縮解除されるべきもとの画像が図34に示されており、65.68MBの画像記憶サイズをもつ。非線形ダイナミック・レンジ圧縮が適用され、結果は、図35に示されるように、単位8において量子化される。画像記憶サイズは今や4.11MBである。量子化された画像において、樹木や影がよく定義されている。
【0092】
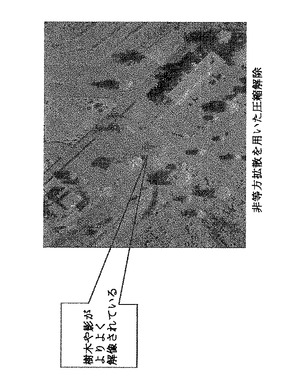
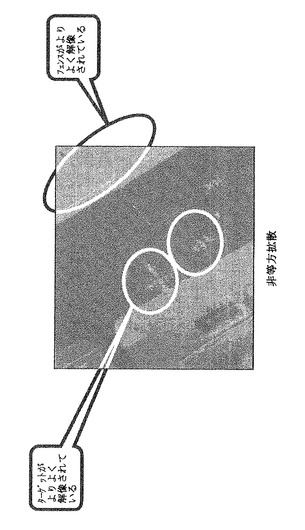
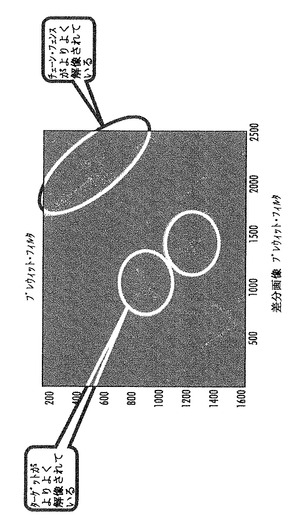
量子化された画像の非等方拡散アルゴリズムによる圧縮解除が図36に示されている。ここでは樹木および影が一層よく定義されている。閲覧されるSAR画像をさらに向上させるためにショック・フィルタが適用されてもよい。SARデータを動的に圧縮し、そのデータを量子化することによって、伝送の際に要求されるデータ量が著しく減らされる。平均して、これらのデータ・セットが伝送のために要求するのは、そのシーンのデータの4.11/65.7=6.25%である。ダイナミック・レンジが大きいほど、圧縮率も大きくなる。シーン内の非常に明るい散乱体については一層圧縮される。ユーザーが損失のある圧縮された/圧縮解除された画像を与えられたとしても、上記の圧縮/圧縮解除アプローチの適用は、閲覧のためのもとの画像の品質を実際に改善するであろう。
【0093】
ノイズのある画像およびSAR画像についての上で論じたような非等方拡散を使った高度抽出/位置合わせについてここで図37〜図44を参照して論じる。ノイズのあるデータは、相関、位置合わせ(同じセンサーまたはセンサー横断)および高度抽出の精度に影響する。現在のところ、ノイズのあるデータについては低域通過フィルタが使用される。SARデータについてはアポディゼーションが使用される。
【0094】
SAR画像を位置合わせするためのコンピュータ実装された方法は、位置合わせされるべき第一および第二のSAR画像を選択し、選択された第一および第二のSAR画像を非等方拡散アルゴリズムを用いて個々に処理し、該処理後に第一および第二のSAR画像を位置合わせすることを含む。位置合わせの前に、それぞれの第一および第二の処理されたSAR画像に対してショック・フィルタが適用されることが好ましい。次いで、位置合わせされたSAR画像に基づいて高度データが抽出されうる。
【0095】
例示の目的のため、二つの位置合わせされていないSAR画像が図37および図38に示されている。位置合わせの際に非等方拡散アルゴリズムを使うことの利点について指標を得るために、基準である図37の画像1とサブ画像である図38の画像2との間の相関がある。それら二つの画像についての相関係数マップが決定される。相関マップの最大値、すなわちピークが得られる。相関マップ上でのピーク位置は、データ間のシフト、すなわち位置合わせされたシフトを示す。画像1のすべては画像2のすべてと相関される。相関の最大値が位置合わせ後に得られる。次いで画像は非等方拡散アルゴリズムを使ってフィルタ処理される。
【0096】
相関のピークは、図39に示されるように、フィルタ処理されていない相関表面における0.9081である。フィルタ処理後、相関のピークは図40に示されるように0.9674である。位置合わせが適用されたのち、図37および図38からの画像は、図41および図42に示されるように、動かない。これらの画像はフィルタ処理されていない。位置合わせのための相関ピークは0.9081であり、位置合わせ後の画像全体の事後相関は0.3634である。フィルタ処理後、対応する画像は図43〜図44に示されている。位置合わせのための相関は0.9674であり、位置合わせ後の画像全体の事後相関は0.8094である。位置合わせは9.4%改善され、相関は位置合わせ後に45%改善される。
【0097】
材料分類のための、非線形非等方拡散処理およびショック・フィルタを使ったベクトルおよび道路抽出について、ここで図45〜図48を参照して論じる。諸単独反射シーンの道路抽出に対する要求がある。現在のところ、平滑化カーネルがデータに適用される。形態学的フィルタもデータに適用される(膨張/収縮)。その際、ベクトル/道路抽出は、ガウス/ゼロ横断(Gaussian/zero crossing)フィルタを使って与えられうる。
【0098】
本発明によれば、SAR画像におけるベクトル抽出のためのコンピュータ実装された方法は、ベクトル抽出のためにSAR画像を選択し、選択されたSAR画像を非等方拡散アルゴリズムで処理し、処理されたSAR画像に基づいてベクトル・データを抽出することを含む。ショック・フィルタは、抽出の前に処理されたSAR画像に適用されうる。次いで道路画像データが、抽出されたベクトル・データに基づいて抽出されうる。
【0099】
データはこうして、非等方拡散アルゴリズムのコヒーレントなスキームを使って描出される。この方式は道路抽出のためのより高い精度を提供する。もとのシーンが図45に示されている。非等方拡散が適用されたのちには、図46に示されるように、ターゲットはよりよく定義される。一般に、ターゲットは、単独反射表面(single reflective surfaces)についてよりよく描出される。これは、セグメンテーションのために好都合である。
【0100】
非等方拡散アルゴリズムは、他のフィルタ型によってすでにフィルタ処理されたあとに他の画像に適用されてもよい。これらのフィルタ型は、たとえばプレウィット(Prewitt)・フィルタおよびロバーツ(Roberts)・フィルタを含む。プレウィット・フィルタによってフィルタ処理されたもとの画像が図47に示されている。図48は、非等方拡散アルゴリズムの適用後の同じ画像である。図示されているターゲットもチェーンリンク・フェンスもよりよく定義されている。
【特許請求の範囲】
【請求項1】
合成開口レーダー(SAR)画像を圧縮解除するコンピュータ実装された方法であって:
圧縮解除されるべきSAR画像を受領する段階と;
前記SAR画像に対してダイナミック・レンジ圧縮を実行する段階と;
圧縮されたSAR画像を量子化する段階と;
量子化された圧縮されたSAR画像を、それに非等方拡散アルゴリズムを適用することによって圧縮解除する段階とを有する、
方法。
【請求項2】
前記ダイナミック・レンジ圧縮が非線形プロセスである、請求項1記載のコンピュータ実装された方法。
【請求項3】
請求項1記載のコンピュータ実装された方法であって、前記非等方拡散アルゴリズムを適用する段階が:
前記量子化された圧縮されたSAR画像中のノイズを判別する段階と;
判別されたノイズに基づいて前記量子化された圧縮されたSAR画像についてのノイズ閾値を選択する段階と;
選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整する段階とを含む、
方法。
【請求項4】
前記非等方拡散アルゴリズムが、非定数項を含む熱伝導方程式に基づいており、前記非等方拡散アルゴリズムを数学的に調整する段階が前記非定数項を調整することを含む、請求項3記載のコンピュータ実装された方法。
【請求項5】
前記量子化された圧縮されたSAR画像の勾配値を判別する段階をさらに有し、前記ノイズを判別する段階が前記勾配値の統計的解析に基づく、請求項3記載のコンピュータ実装された方法。
【請求項6】
合成開口レーダー(SAR)画像を圧縮解除するコンピュータ・システムであって:
圧縮解除されるべきSAR画像を記憶するデータベースと;
前記データベースからのSAR画像を圧縮解除するプロセッサとを有しており、前記圧縮解除は:
前記SAR画像を受領し;
前記SAR画像に対してダイナミック・レンジ圧縮を実行し;
圧縮されたSAR画像を量子化し;
量子化された圧縮されたSAR画像を、それに非等方拡散アルゴリズムを適用することによって圧縮解除することを含む、
コンピュータ・システム。
【請求項7】
前記ダイナミック・レンジ圧縮が非線形プロセスである、請求項6記載のコンピュータ・システム。
【請求項8】
請求項6記載のコンピュータ・システムであって、前記非等方拡散アルゴリズムの適用が:
前記量子化された圧縮されたSAR画像中のノイズを判別し;
判別されたノイズに基づいて前記量子化された圧縮されたSAR画像についてのノイズ閾値を選択し;
選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整することを含む、
コンピュータ・システム。
【請求項9】
前記非等方拡散アルゴリズムが、非定数項を含む熱伝導方程式に基づいており、前記非等方拡散アルゴリズムを数学的に調整することが前記非定数項を調整することを含む、請求項8記載のコンピュータ・システム。
【請求項10】
前記非等方拡散アルゴリズムの適用が、前記量子化された圧縮されたSAR画像の勾配値を判別する段階をさらに有し、前記ノイズの判別が前記勾配値の統計的解析に基づく、請求項8記載のコンピュータ・システム。
【請求項1】
合成開口レーダー(SAR)画像を圧縮解除するコンピュータ実装された方法であって:
圧縮解除されるべきSAR画像を受領する段階と;
前記SAR画像に対してダイナミック・レンジ圧縮を実行する段階と;
圧縮されたSAR画像を量子化する段階と;
量子化された圧縮されたSAR画像を、それに非等方拡散アルゴリズムを適用することによって圧縮解除する段階とを有する、
方法。
【請求項2】
前記ダイナミック・レンジ圧縮が非線形プロセスである、請求項1記載のコンピュータ実装された方法。
【請求項3】
請求項1記載のコンピュータ実装された方法であって、前記非等方拡散アルゴリズムを適用する段階が:
前記量子化された圧縮されたSAR画像中のノイズを判別する段階と;
判別されたノイズに基づいて前記量子化された圧縮されたSAR画像についてのノイズ閾値を選択する段階と;
選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整する段階とを含む、
方法。
【請求項4】
前記非等方拡散アルゴリズムが、非定数項を含む熱伝導方程式に基づいており、前記非等方拡散アルゴリズムを数学的に調整する段階が前記非定数項を調整することを含む、請求項3記載のコンピュータ実装された方法。
【請求項5】
前記量子化された圧縮されたSAR画像の勾配値を判別する段階をさらに有し、前記ノイズを判別する段階が前記勾配値の統計的解析に基づく、請求項3記載のコンピュータ実装された方法。
【請求項6】
合成開口レーダー(SAR)画像を圧縮解除するコンピュータ・システムであって:
圧縮解除されるべきSAR画像を記憶するデータベースと;
前記データベースからのSAR画像を圧縮解除するプロセッサとを有しており、前記圧縮解除は:
前記SAR画像を受領し;
前記SAR画像に対してダイナミック・レンジ圧縮を実行し;
圧縮されたSAR画像を量子化し;
量子化された圧縮されたSAR画像を、それに非等方拡散アルゴリズムを適用することによって圧縮解除することを含む、
コンピュータ・システム。
【請求項7】
前記ダイナミック・レンジ圧縮が非線形プロセスである、請求項6記載のコンピュータ・システム。
【請求項8】
請求項6記載のコンピュータ・システムであって、前記非等方拡散アルゴリズムの適用が:
前記量子化された圧縮されたSAR画像中のノイズを判別し;
判別されたノイズに基づいて前記量子化された圧縮されたSAR画像についてのノイズ閾値を選択し;
選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整することを含む、
コンピュータ・システム。
【請求項9】
前記非等方拡散アルゴリズムが、非定数項を含む熱伝導方程式に基づいており、前記非等方拡散アルゴリズムを数学的に調整することが前記非定数項を調整することを含む、請求項8記載のコンピュータ・システム。
【請求項10】
前記非等方拡散アルゴリズムの適用が、前記量子化された圧縮されたSAR画像の勾配値を判別する段階をさらに有し、前記ノイズの判別が前記勾配値の統計的解析に基づく、請求項8記載のコンピュータ・システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【公表番号】特表2010−522401(P2010−522401A)
【公表日】平成22年7月1日(2010.7.1)
【国際特許分類】
【出願番号】特願2010−501105(P2010−501105)
【出願日】平成20年3月20日(2008.3.20)
【国際出願番号】PCT/US2008/057653
【国際公開番号】WO2008/116062
【国際公開日】平成20年9月25日(2008.9.25)
【出願人】(594071675)ハリス コーポレイション (287)
【氏名又は名称原語表記】Harris Corporation
【Fターム(参考)】
【公表日】平成22年7月1日(2010.7.1)
【国際特許分類】
【出願日】平成20年3月20日(2008.3.20)
【国際出願番号】PCT/US2008/057653
【国際公開番号】WO2008/116062
【国際公開日】平成20年9月25日(2008.9.25)
【出願人】(594071675)ハリス コーポレイション (287)
【氏名又は名称原語表記】Harris Corporation
【Fターム(参考)】
[ Back to top ]