
SAWセンサーデバイス及びこれを利用した流体制御方法

【課題】ノイズの発生を最小化して分析の信頼性が高められるSAWセンサーデバイス及びこれを利用した流体制御方法を提供する。
【解決手段】SAWセンサーデバイスに関する技術であって、流体の流れを制御する流体制御部がSAWセンサーを含む本体部の外部に形成されることにより、流体の制御時に流体制御部の汚染によるノイズの発生を最小化することができ、流体制御部を繰り返して再使用することが可能であるため、経済性及び実用性に優れている。
【解決手段】SAWセンサーデバイスに関する技術であって、流体の流れを制御する流体制御部がSAWセンサーを含む本体部の外部に形成されることにより、流体の制御時に流体制御部の汚染によるノイズの発生を最小化することができ、流体制御部を繰り返して再使用することが可能であるため、経済性及び実用性に優れている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、SAWセンサーを含むデバイス及びこれを利用した流体制御方法を提供する。
【背景技術】
【0002】
SAWセンサーは、表面弾性波(Surface Acoustic Wave;SAW)を利用して分析物であるターゲット物質の存否などをセンシングする装置である。
【0003】
一般的にSAWセンサーは、圧電物質からなる基板上に形成され、センサーの表面には所望のターゲット物質と特異的な結合を有するレセプター(Receptor)が形成されている。そこで、ターゲット物質を含む溶液をSAWセンサーに流すと、ターゲット物質とレセプターとの物理的、化学的、電気的な反応により波長の変化が発生し、これによるシグナル変化によりターゲット物質の含量を診断、モニタリングすることができる。
【0004】
このようなSAWセンサーデバイスは、化学的流体、体液などの生物学的流体などの試料内に含まれているターゲット物質の分析及びモニタリングに利用することもできる。
【0005】
SAWセンサーは、表面の質量変化だけでなく、流体の圧力、媒質の粘度(Viscosity)や密度(density)などにも非常に敏感である。このような質量外の要因によるシグナル変化であるノイズ(Noise)を最小化するためには、流体を正確に制御することが非常に重要である。
【0006】
上記SAWセンサーによって分析されたターゲットサンプル溶液内には多量のターゲット物質が含有になっていて、流体の移動時に、上記多量のターゲット物質がチャンネルとチャンバーだけでなく、バルブ、ポンプにも汚染を起こす。上記汚染の結果で上記ターゲットサンプル溶液を分析する時、実質的な誤謬を起こす事もあり得る。
【0007】
このような誤謬を防止するためには、バルブ及びポンプを再使用せずに使い捨てにしなければならない。しかし、これは経済的な側面から商業的に実現可能性が低いという限界がある。
【発明の概要】
【発明が解決しようとする課題】
【0008】
流体試料内の所定物質の存否及び定量分析において、ノイズの発生を最小化して分析の信頼性が高められるSAWセンサーデバイス及びこれを利用した流体制御方法を提供する。
【課題を解決するための手段】
【0009】
本発明はこのような問題を解決するために、SAWセンサーデバイスの外部で気圧(air pressure)または通気(ventilation)の調節などにより流体を移動させ、制御する技術を提供する。
【0010】
一例によるSAWセンサーデバイスは、本体部及び上記本体部の外部に位置する流体制御部を含む。上記本体部は試料チャンバー、該試料チャンバーと連結されているSAWセンサー、該SAWセンサーと連結されており、SAWセンサーを通過した流体試料を担持する廃棄チャンバー、及び上記の試料チャンバー、SAWセンサー、及び廃棄チャンバーを連結するチャンネルを含む。上記流体制御部が上記本体部をパスする試料の流れを制御する。
【0011】
本発明はまた、試料内のターゲット物質を分析するためのシステムを提供する。一例として、上記のシステムは、
(i) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されている第1のSAWセンサーデバイス(以下、場合により‘テストSAWセンサーデバイス’という);及び、
(ii) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されていない第2のSAWセンサーデバイス(以下、場合により‘対照SAWセンサーデバイス’という)から構成できる。
【0012】
このようなシステムにおいて、ターゲット物質がテストSAWセンサーデバイスでセンサー表面のレセプターに結合することにより表わされたシグナルと、対照SAWセンサーデバイスのシグナルの違いにより、ターゲットサンプルの有無及び定量を行うことができる。
【0013】
また本発明は、上記のSAWセンサーデバイスを利用した流体制御方法を提供する。一例による流体制御方法は、上記のSAWセンサーデバイスで本体部の外部に位置する流体制御部から提供された移送駆動力により、試料チャンバー内の流体をSAWセンサー方向に水平移動させる段階を含む。
【0014】
このような方法によると、外部に位置する流体制御部から生成された移送駆動力により試料チャンバー内の流体を移動させるため、流体と流体制御部が直接的に接触しないことにより流体の汚染を防止することができる。
【発明の効果】
【0015】
本発明の実施例によるSAWセンサーデバイスは、流体制御部が流体が流動する本体部に位置しないことから、流体と流体制御部が直接接触しない。従って、バルブ、ポンプなどの流体制御部の汚染によるノイズを最小化できるだけでなく、流体制御部の再使用を可能にするため、経済性及び産業的効用価値に優れている。
【図面の簡単な説明】
【0016】
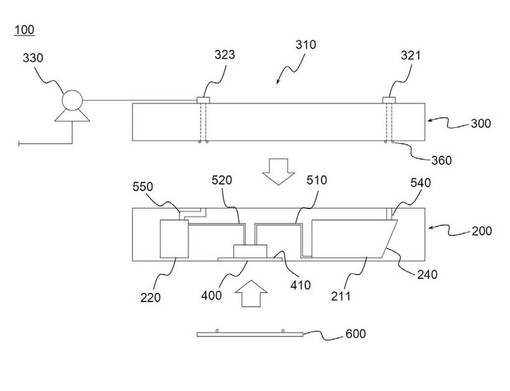
【図1】本発明の一実施例によるSAWセンサーデバイスの断面図。
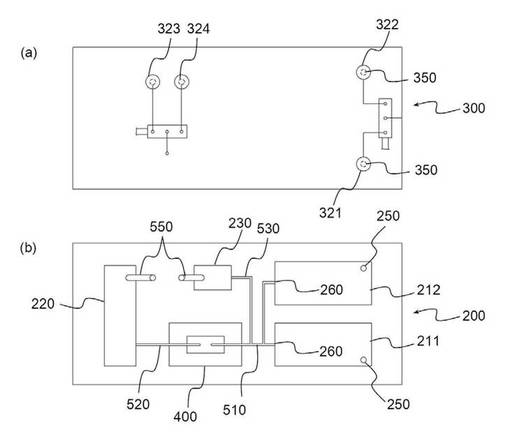
【図2】図1によるSAWセンサーデバイスの平面図((a)は本体部であり、(b)はカバー部である)。
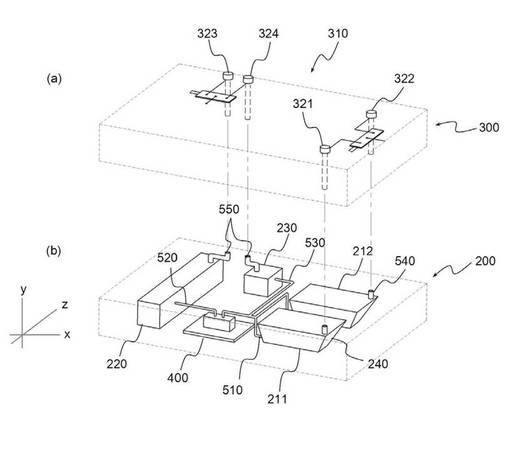
【図3】図1によるSAWセンサーデバイスの分解斜視図((a)は本体部であり、(b)はカバー部である)。
【発明を実施するための形態】
【0017】
以下、本発明の利点と特徴、及びそれを遂行する方法が、下記の実施例に対する詳細な説明及び添付図面を参照することにより、さらに容易に理解できる。しかし、本発明は多くの多様な形態で実施でき、ここで言及した実施例に限定されて構成されるものではない。
【0018】
本発明の一つの実施例によるSAWセンサーデバイスは、試料チャンバー、該試料チャンバーと連結されているSAWセンサー、該SAWセンサーと連結されており、SAWセンサーを通過した流体試料を担持する廃棄チャンバー、及び上記の試料チャンバー、SAWセンサー、及び廃棄チャンバーを連結するチャンネルからなる本体部を含み、流体の流れを制御する流体制御部が、上記本体部の外部に位置するものからなっている。
【0019】
また、本発明の一つの実施例によるSAWセンサーデバイスの流体制御方法は、試料チャンバーと、SAWセンサーと、該SAWセンサーを通過した試料を担持する廃棄チャンバーと、を連結するチャンネルからなる本体部の外部に位置する流体制御部から提供される移送駆動力を利用して、前記試料チャンバー内の流体を前記SAWセンサー方向に水平移動させる段階を含んでいる。
【0020】
従来のSAWセンサーデバイスでは、流体制御部がチャンバーとSAWセンサーとの間の流路またはチャンネルに装着されており、流体試料による流体制御部の汚染がノイズ発生の主なる原因となった。
【0021】
しかし、本発明の実施例によると、流体制御部が本体部の外部に位置するため、チャンバーまたはSAWセンサーと直接接触しない構造を持つ。従って、流体制御部の汚染及びノイズの発生を防止することができる。
【0022】
一例として、上記の流体制御部は、本体部の垂直上部面上に位置できる。ここで、本体部の平面に対して垂直上部面を意味する(図3のy軸参照)。このような構造によると、試料チャンバーの垂直上部から流体を制御するため、外力の印加無しでは流体が流体制御部と接触する可能性が根本的に排除される。例えば、本体部の上段をカバーするカバー部上に流体制御部が装着された構造が挙げられる。
【0023】
これと関連して、図1には本発明の一実施例によるSAWセンサーデバイスの断面図が模式的に図示されており、図2にはその平面図が、図3にはその斜視図がそれぞれ模式的に図示されている。これを図面を参照して具体的に説明する。
【0024】
本実施例によるSAWセンサーデバイス(100)は、本体部(200)と本体部(200)の上段面をカバーするカバー部(300)、及びカバー部(300)上に位置する流体制御部(310)からなっており、本体部(200)は流体を担持する試料チャンバー(211、212)、第1のチャンネル(510)により試料チャンバー(211、212)と連結されているSAWセンサー(400)、及び第2のチャンネル(520)によりSAWセンサー(400)と連結されている廃棄チャンバー(220)からなっている。
【0025】
上記の流体制御部(310)は、流体の出入を制御したり流速を制御したりするための装置であって、例えば、空気の流入/流出により流体の流れを制御する装置であり得る。このような例としては、流体の出入を制御するバルブ(valve;321、322、323、324)及び/又は流圧または流速を制御するポンプ(pump;330)が挙げられる。
【0026】
上記のバルブ(321、322、323、324)はSAWセンサーデバイス(100)作動中に、SAWセンサーの表面にサンプル溶液を投入するか否かを制御する。上記のバルブ(321、322、323、324)は流体の出入を制御するため、少なくともサンプル溶液が担持された試料チャンバー(211、212)と連結されていて、場合により、図示されたように試料チャンバー(211、212)及び廃棄チャンバー(220)にそれぞれ連結されることができる。
【0027】
上記のポンプ(330)は流体の流れを制御する機能を行うため、ポンプ(330)でかけられる圧力がチャンネルのネットワークを通じて試料チャンバー(211、212)内の流体がSAWセンサー(400)を経て廃棄チャンバー(220)に移動できる。具体的に上記のポンプ(330)は、チャンバー内の圧力を加圧あるいは減圧させて試料チャンバー(211、212)内の流体がSAWセンサー(400)を経て廃棄チャンバー(220)に移動できる移送駆動力を提供し、流量を調節することができる。
【0028】
上記のポンプ(330)は、陽圧/陰圧の形態に応じてチャンバー内の圧力を加圧あるいは減圧させる。そこで、SAWセンサー(400)に流入される流体を担持した試料チャンバー(211、212)側に位置することもでき、図示されたようにSAWセンサー(400)から排出される流体を担持した廃棄チャンバー(220)側に位置することもできる。
【0029】
一例として、デバイスの流入部側に陽圧ポンプ(図示しない)が位置できる。例えば、試料チャンバー(211、212)と連結されたバルブ(321、322)と陽圧ポンプを連結し、廃棄チャンバー(220)を加圧させると、陽圧ポンプから排出された空気がバルブ(321、322)を通じて試料チャンバー(211、212)内に流入され、これによる圧力により流体がSAWセンサー(400)方向にチャンネルに沿って移動できるようになる。
【0030】
また別の例として、上記SAWセンサーデバイス(100)の流出部側に陰圧ポンプ(330)が位置できる。例えば、廃棄チャンバー(220)と連結されたバルブ(323)と陰圧ポンプ(330)を連結して廃棄チャンバー(220)−SAWセンサー(400)−試料チャンバー(211、212)に順次に圧力をかけることができる。即ち、試料チャンバー(211、212)を喚起させることにより廃棄チャンバー内の空気の圧力を下げると、試料チャンバー(211、212)内の流体がSAWセンサー(400)−廃棄チャンバー(220)方向に移動できる。
【0031】
また、流入部側に陽圧ポンプを装着し、流出部側には陰圧ポンプ(330)を装着することもできる。
【0032】
流体制御部(310)は、流体を制御するために本体部(200)と直接的または間接的に連結することもできる。そこで、図示されたようにバルブ(321、322、323、324)は、試料チャンバー(211、212)及び廃棄チャンバー(220)にそれぞれ連結されており、バルブ(323)はポンプ(330)と連結されている。これにより、ポンプ(330)−バルブ(323)−チャンバー(220)が連結された構造を持つことができる。このとき、上記の連結は直接的連結だけでなく、間接的連結及び機能的連結を含む意味である。
【0033】
上記のバルブ(321、322、323、324)及び/又はポンプ(330)とチャンバーを連結するための一例として、チャンバー(211、212、220)の表面に所定の開口部(250)を形成し、これにより対応する部位にチャンネルなどを連結し、バルブ及び/又はポンプと連結できる。
【0034】
例えば、上記のバルブは試料チャンバー(211、212)及び/又は廃棄チャンバー(220)と垂直方向に連結することもできる。この場合、チャンバーに圧力がかけられるに所要される移送距離及び時間を最小化することができる。
【0035】
また別の例として、上記のチャンバー(211、212、220)は、流体が流入または流出できるように少なくとも一つの開口部(250)を持つことができる。例えば、流体制御部(310)などのような外部装置と連結するための開口部(250)と内部のSAWセンサー(400)または他のチャンバーと連結するための開口部(260)からなり得る。また、それぞれの開口部(250、260)にはチャンネルが結合されており、流路を形成することができる。
【0036】
図1〜図3によると、試料チャンバー(211、212)及び廃棄チャンバー(220)にそれぞれ第1の開口部(250)を形成し、これと対応する垂直上段カバー部(300)に第2の開口部(350)を形成し、第2の開口部(350)がバルブ(321)と連結された構造が図示されている。しかし、チャンバー(211、212、220)とバルブ(321)が連通できる構造であれば、特に制限されるものではない。
【0037】
一例として、流体制御の信頼性を高めて流体と流体制御部(310)の接触を防止するため,上記流体制御部(310)を含む上記カバーを上記本体部に連結する開口部にO‐リング(ring)などのような密閉機構(360)を装着することができる。
【0038】
このような流体制御部(310)は本体部(200)と分離され独立的に装着することもでき、本体部(200)と一体として形成することもでき、特に限定されるものではない。
【0039】
上記の流体制御部(310)はまた、プラグ、障害物、または装置により流体の流れを変更するバッフル(baffle)などを含むことができる。
【0040】
上記のSAWセンサーデバイスは、所定の試料チャンバー(211、212)及び廃棄チャンバー(220)を含む。上記の試料チャンバー(211、212)は、SAWセンサー(400)を経ていない流体を担持するためのチャンバーであり、廃棄チャンバー(220)は、SAWセンサー(400)を経た状態の流体を担持するためのチャンバーである。
【0041】
上記の試料チャンバー(211、212)は一つ以上であり得、それぞれ互いに異なる流体を含むことができる。上記流体の例としては、ターゲット物質を含む溶液(以下、‘ターゲットサンプル’ともいう)、2次反応溶液、基準溶液、洗浄液などが挙げられるが、これに限定されるものではなく、上記のターゲットサンプルは一つ以上であり得る。
【0042】
上記のターゲットサンプルはターゲット物質を含む溶液であって、上記の‘ターゲット物質’はSAWセンサー(400)を通じて感知しようとする対象物質を意味する。
【0043】
上記のターゲット物質は、蛋白質、抗体、抗原、DNA、RNA、ウイルス、バクテリア(Bacterial cell)、動物細胞(Animal cell)、組織(Tissue)などの生体分子またはこれにより発生されたToxinなどのBio productsなどが挙げられるが、これに限定されるものではない。
【0044】
また、上記のターゲットサンプルは生物学的サンプルであり得、例えば、唾液、痰、脳脊髄液、血液、血清、プラズマ、小便、生検物質などが挙げられるが、これに限定されるものではない。
【0045】
基準溶液は、必要により洗浄液と同一溶液を使用することもできる。
【0046】
上記の基準溶液は、ターゲットサンプルに対応してシグナル分析の対比になる流体を意味する。上記の基準溶液は、粘度、伝導性、密度などの特性がターゲットサンプルと類似するものであり得、例えば、バッファー溶液などが上げられる。
【0047】
一例として、上記のチャンバー(211、212、220)の側面は、所定の勾配のテーパー形状(240)になっていることもある。このように、所定の勾配を持つ場合、流体の移動距離を減らし、流体の移動時に加速力を提供することができ、不必要な流体損失(loss)を減らすことができる。
【0048】
上記の勾配は、例えば、約1°〜60°または約5°〜30°であり得るが、これに限定されるものではない。
【0049】
本実施例によるSAWセンサーデバイスにおいて、チャンバーとSAWセンサー(400)の相互間は、チャンネルにより互いに連通できる構造を持つ。
【0050】
上記のチャンネルは、上記の試料チャンバー(211、212)とSAWセンサー(400)との間を連結するチャンネル(第1のチャンネル;510)と上記のSAWセンサー(400)と廃棄チャンバー(220)を連結するチャンネル(第2のチャンネル;250)を含むことができ、更なるチャンバーまたは装置が付加される場合、これを連結するためのチャンネルを含むことができる。
【0051】
上記本体部(200)の内部に形成されたチャンネル(510、520)は流体の流路を形成するため、外力がかけられていない状態またはデバイスの非作動状態で流体が移動することを防止できる構造であり得る。
【0052】
上記の試料チャンバー(211、212)とSAWセンサー(400)との間を連結する第のチャンネル(510)は、流体が試料チャンバー(211、212)の下段から上向した後、SAWセンサー(400)の上段面に流入できる構造であり得る。このような構造を持つ場合、外力によらずには試料チャンバー(211、212)内の流体がチャンネルに沿って移動できなくなるため、流体の流出を容易に制御できる。
【0053】
図1には、第1のチャンネル(510)が試料チャンバー(211、212)のSAWセンサー(400)側の側面下部から垂直上向した後、SAWセンサー(400)の上段面に垂直下向する構造を形成している。
【0054】
また、上記のSAWセンサー(400)と廃棄チャンバー(220)を連結する第2のチャンネル(520)は、流体がSAWセンサー(400)の上段面から垂直に上向した後、廃棄チャンバー(220)に流入できる構造であり得る。この場合、廃棄チャンバー(220)に移動した流体がSAWセンサー(400)側方向に逆流することを防止することができる。
【0055】
図1には、第2のチャンネル(520)がSAWセンサー(400)の上段から垂直に上向した後、廃棄チャンバー(220)のSAWセンサー(400)側の上段部に連結された構造を形成している。また、第2のチャンネル(520)がSAWセンサー(400)の上段から垂直に上向した後、廃棄チャンバー(220)のSAWセンサー(400)側の下段部に連結された構造であり得、この場合、廃棄チャンバー(220)内の溶液が逆流をさらに効果的に遮断することができる。
【0056】
上記第1のチャンネル(510)及び第2のチャンネル(520)の形状は、これに限定されるものではなく、チャンバーとSAWセンサー(400)を相互連結する構造であれば、本発明の範囲内に含まれることは言うまでもない。
【0057】
また、外部装置と連結するための外部チャンネルを含むことができる。このような外部チャンネル(540、550)または開口部(250)は図示されたように、チャンバー上段の高さ以上に形成できる。これにより、流体の移送駆動力を提供する外圧がチャンバーの上部から下部に導入できる。一方、上記の外部チャンネル(540、550)または開口部(250)はバルブなどと連動して、外圧の導入時に喚起するためのチャンバーの開閉を制御することが可能である。
【0058】
上記の試料チャンバーまたは廃棄チャンバーは一つ以上であって、2つまたは3つであり得、それぞれのチャンバー相互間またはチャンバーとSAWセンサーとの連結は、相互通気できる形態であれば特に制限されなく、多様であり得る。
【0059】
上記のSAWセンサー(400)は特に制限されなく、表面弾性波を利用してターゲット物質の特性を感知する装置である。一般的に、SAWセンサー(400)は圧電特性(Piezoelectricity)を有する基板(410)上に一対のIDT(Inter Digital Transducer)金属電極が形成された構造からなっている。
【0060】
上記の基板(410)をなす圧電物質は、機械的信号の印加時に電気的特性が変化したり(圧電効果)、電気的信号の印加時に機械的信号が生じたりする(逆圧電効果)材料である。例えば、ニオブ酸リチウム(例;LiNbO3)、タンタル酸リチウム(例;LiTaO3)、四ホウ素酸リチウム(Li2B4O7)、チタン酸バリウム(BaTiO3)、PbZrO3、PbTiO3、PZT(PbZrxTi1−xO3)、ZnO、GaAs、石英(Quartz)、ニオブ酸塩などが挙げられる。
【0061】
上記のIDT(図示しない)は、電気回路と音波遅延線(acoustic delay line;図示しない)と間のインターフェースであって、アルミニウム合金、銅合金、金などの薄膜金属から形成できるが、これに限定されない。
【0062】
上記一対のIDTで一つのIDTは、印加されたシグナルにより表面弾性波を発生させるため、これを‘入力(input)IDT’または‘送信器(transmitter)’という。このとき発生された表面弾性波は、基板の表面に沿って適切な周波数で膨張と圧縮によりもう一つのIDTに伝達され、逆圧電効果により電気的信号に変換される。この後者のIDTを‘出力(output)IDT’または‘受信器(receiver)’という。
【0063】
上記のSAWセンサー(400)の表面には、ターゲットサンプル内に存在するターゲット物質と結合できるレセプター(receptor;図示しない)が固定できる。上記のレセプターは、ターゲット物質と特異的に反応できる物質であれば、特に制限されない。
【0064】
例えば、蛋白質、抗原、抗体、酵素、DNA、RNA、PNA(peptide nucleic acid、人工DNA)、細胞、及び嗅覚神経(olfactory)などが挙げられる。
【0065】
SAWセンサー(400)は流体の種類、ターゲット物質またはレセプターの種類により複数個であり得る。また、SAWセンサー(400)は表面弾性波を誘発する装置によりシグナルを生成させることができ、上記の表面弾性波の誘発装置としては発信器(Oscillator)(600)などが挙げられるが、これに限定されない。
【0066】
本発明の例示的なSAWセンサーデバイス(100)において流体の移動過程を見てみると、以下の通りである。まず、バルブ(323)をゲーティングしてからポンプ(330)を駆動させると、空気の流入により圧力がチャンバーにかけられる。外部からかけられた空気は、チャンバーの上段に集められるようになり空気の圧力勾配が発生し、これにより流体が移動するようになる。即ち、流体はポンプ(330)と連結されたバルブ(323)のゲーティングにより試料チャンバー(211、212)から、第1のチャンネル(510)に沿ってSAWセンサー(400)の入口ポートに移動する。SAWセンサー(400)を通じて流れた後、出口ポートを通じて第1の廃棄チャンバー(220)に移動する。
【0067】
即ち、所望のチャンバーのバルブ(321)をゲーティングすると、流体の流入により上昇されたチャンバー内の圧力が除去され、溶液が容易に進入できるようになる。反対に、バルブ(321)及び開口部(250、350)を閉じると、流体の流入による圧力が相殺されなくて流体の進入ができない。これにより、バルブ(321、322、323、324)をSAWセンサーデバイスの内部に形成することなく、所望の部位に流体を制御することができる。
【0068】
従って、ターゲットサンプルの汚染による分析誤謬を最小化でき、高価なバルブ(321、322、323、324)、ポンプ(330)などの流体制御部(310)を繰り返して再使用できるという長所がある。
【0069】
一方、空気の流入/流出により流体の流れを制御することにおいて、空気により発生した気泡は、SAW基板に流入される場合はノイズとして作用し、シグナルの変化を起こすことができる。即ち、流体1を注入した後、試料チャンバー(211)内の流体を流体2に交替する場合、流体1の注入による気泡によりノイズが発生し、流体2のセンシングは信頼性が落ちる。
【0070】
これを防止するために、SAW基板デバイスはノイズを除去するために気泡を捕集するチャンバーを更に含むことができる。
【0071】
一例として、図1〜図3に図示されたように、SAWセンサーに気泡が流入されることを防止するために、上記の試料チャンバー(211、212)とSAW基板との間に、気泡を捕集するための第2の廃棄チャンバー(230)がチャンネル(530)により連結された構造であり得る。
【0072】
このような構造のデバイスの作動過程を例示的に見てみると、流体1をSAWセンサー(400)に移動させた後、チャンネル内に含まれた気泡を第2の廃棄チャンバー(230)に捕集し、流体2をSAWセンサー(400)に移動させることができる。
【0073】
図1〜図3に図示されたように、廃棄チャンバー(220)側の上段面上に形成されたバルブ(323)にポンプ(330)が連結されている場合、デバイスの作動順序は以下の通りである。
【0074】
(a) 第1の廃棄チャンバー(220)上のバルブ(323)をゲーティングして流体1チャンバー(211)の圧力を増加させ、流体1をSAWセンサー(400)に注入する。
【0075】
(b) 第2の廃棄チャンバー(230)上のバルブ(324)をゲーティングして流体2チャンバーの圧力を増加させることにより、チャンネルに残存していた溶液及び気泡を第2の廃棄チャンバー(230)に捕集する。
【0076】
(c) 第1の廃棄チャンバー(220)上のバルブ(323)をゲーティングして流体2チャンバー(212)の圧力を増加させ、溶液2をSAWセンサー(400)に注入する。
【0077】
本発明はまた、試料内のターゲット物質を分析するためのシステムを提供する。一例として、上記のシステムは、
(i) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されている第1のSAWセンサーデバイス(以下、場合により‘テストSAWセンサーデバイス’という)及び、
(ii) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されていない第2のSAWセンサーデバイス(以下、場合により‘対照SAWセンサーデバイス’という)から構成できる。
【0078】
このようなシステムにおいて、ターゲット物質がテストSAWセンサーデバイスでセンサー表面のレセプターに結合することにより表わされたシグナルと、対照SAWセンサーデバイスのシグナルの違いにより、ターゲットサンプルの有無及び定量を行うことができる。
【0079】
また本発明は、上記のSAWセンサーデバイスを利用した流体制御方法を提供する。一例による流体制御方法は、上記のSAWセンサーデバイスで本体部(200)の外部に位置する流体制御部(310)から提供された移送駆動力により、試料チャンバー(211、212)内の流体をSAWセンサー(400)方向に水平移動させる段階を含む。
【0080】
上記の移送駆動力は、例えば気圧であり得る。そこで、流体制御部(310)は外部に位置して本体部(200)に空気を伝達する機能をするため、流体と流体制御部(310)が直接的に接触しない。従って、流体制御部(310)が流体により汚染されることを根本的に防止することができる。
【0081】
本発明の一実施例によるSAWセンサーデバイス(100)を利用したセンシング(Sensing)過程は、SAWセンサーデバイスを共振器(Oscillator;600)に装着し、これを発振させてシグナルを安定化させる段階、試料チャンバー(211、212)内の基準溶液をSAWセンサー(400)に注入して発振シグナルをベースライン(base line)に設定する過程、及び、試料チャンバー(211、212)内のターゲットサンプルをSAWセンサー(400)に注入して発振シグナルを観察する過程、を含むことができる。
【0082】
上記のシグナルは周波数、phase、amplitudeなどであり得る。上記のターゲットサンプルが、上記の試料チャンバー(211、212)からSAWセンサー(400)に移動すると、SAWセンサー(400)の表面に付着したレセプターとターゲットサンプル内のターゲット物質が反応して波長変化を誘発する。そこで、ベースラインとターゲットサンプル注入時の波長変化の違いにより、ターゲットサンプル内のターゲット物質の存否、含量、種類などが検出できる。
【0083】
上記において、SAWセンサー(400)を経た流体は廃棄チャンバー(220)に移動され廃棄される。
【0084】
必要により、流体を流動させた後、SAWセンサー(400)に気泡が流入されないように、チャンネルに残存する気泡を除去する過程をさらに経ることができる。また、測定が終了した後、洗浄溶液でSAWセンサーデバイスを洗浄し、シグナル変化を再測定することもできる。
【0085】
本発明が属する分野で通常の知識を有する者であれば、上記の内容を基に本発明の範疇内で多様な応用及び変形を行うことが可能であろう。
【符号の説明】
【0086】
100 SAWセンサーデバイス、
200 本体部、
300 カバー部、
400 SAWセンサー。
【技術分野】
【0001】
本発明は、SAWセンサーを含むデバイス及びこれを利用した流体制御方法を提供する。
【背景技術】
【0002】
SAWセンサーは、表面弾性波(Surface Acoustic Wave;SAW)を利用して分析物であるターゲット物質の存否などをセンシングする装置である。
【0003】
一般的にSAWセンサーは、圧電物質からなる基板上に形成され、センサーの表面には所望のターゲット物質と特異的な結合を有するレセプター(Receptor)が形成されている。そこで、ターゲット物質を含む溶液をSAWセンサーに流すと、ターゲット物質とレセプターとの物理的、化学的、電気的な反応により波長の変化が発生し、これによるシグナル変化によりターゲット物質の含量を診断、モニタリングすることができる。
【0004】
このようなSAWセンサーデバイスは、化学的流体、体液などの生物学的流体などの試料内に含まれているターゲット物質の分析及びモニタリングに利用することもできる。
【0005】
SAWセンサーは、表面の質量変化だけでなく、流体の圧力、媒質の粘度(Viscosity)や密度(density)などにも非常に敏感である。このような質量外の要因によるシグナル変化であるノイズ(Noise)を最小化するためには、流体を正確に制御することが非常に重要である。
【0006】
上記SAWセンサーによって分析されたターゲットサンプル溶液内には多量のターゲット物質が含有になっていて、流体の移動時に、上記多量のターゲット物質がチャンネルとチャンバーだけでなく、バルブ、ポンプにも汚染を起こす。上記汚染の結果で上記ターゲットサンプル溶液を分析する時、実質的な誤謬を起こす事もあり得る。
【0007】
このような誤謬を防止するためには、バルブ及びポンプを再使用せずに使い捨てにしなければならない。しかし、これは経済的な側面から商業的に実現可能性が低いという限界がある。
【発明の概要】
【発明が解決しようとする課題】
【0008】
流体試料内の所定物質の存否及び定量分析において、ノイズの発生を最小化して分析の信頼性が高められるSAWセンサーデバイス及びこれを利用した流体制御方法を提供する。
【課題を解決するための手段】
【0009】
本発明はこのような問題を解決するために、SAWセンサーデバイスの外部で気圧(air pressure)または通気(ventilation)の調節などにより流体を移動させ、制御する技術を提供する。
【0010】
一例によるSAWセンサーデバイスは、本体部及び上記本体部の外部に位置する流体制御部を含む。上記本体部は試料チャンバー、該試料チャンバーと連結されているSAWセンサー、該SAWセンサーと連結されており、SAWセンサーを通過した流体試料を担持する廃棄チャンバー、及び上記の試料チャンバー、SAWセンサー、及び廃棄チャンバーを連結するチャンネルを含む。上記流体制御部が上記本体部をパスする試料の流れを制御する。
【0011】
本発明はまた、試料内のターゲット物質を分析するためのシステムを提供する。一例として、上記のシステムは、
(i) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されている第1のSAWセンサーデバイス(以下、場合により‘テストSAWセンサーデバイス’という);及び、
(ii) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されていない第2のSAWセンサーデバイス(以下、場合により‘対照SAWセンサーデバイス’という)から構成できる。
【0012】
このようなシステムにおいて、ターゲット物質がテストSAWセンサーデバイスでセンサー表面のレセプターに結合することにより表わされたシグナルと、対照SAWセンサーデバイスのシグナルの違いにより、ターゲットサンプルの有無及び定量を行うことができる。
【0013】
また本発明は、上記のSAWセンサーデバイスを利用した流体制御方法を提供する。一例による流体制御方法は、上記のSAWセンサーデバイスで本体部の外部に位置する流体制御部から提供された移送駆動力により、試料チャンバー内の流体をSAWセンサー方向に水平移動させる段階を含む。
【0014】
このような方法によると、外部に位置する流体制御部から生成された移送駆動力により試料チャンバー内の流体を移動させるため、流体と流体制御部が直接的に接触しないことにより流体の汚染を防止することができる。
【発明の効果】
【0015】
本発明の実施例によるSAWセンサーデバイスは、流体制御部が流体が流動する本体部に位置しないことから、流体と流体制御部が直接接触しない。従って、バルブ、ポンプなどの流体制御部の汚染によるノイズを最小化できるだけでなく、流体制御部の再使用を可能にするため、経済性及び産業的効用価値に優れている。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例によるSAWセンサーデバイスの断面図。
【図2】図1によるSAWセンサーデバイスの平面図((a)は本体部であり、(b)はカバー部である)。
【図3】図1によるSAWセンサーデバイスの分解斜視図((a)は本体部であり、(b)はカバー部である)。
【発明を実施するための形態】
【0017】
以下、本発明の利点と特徴、及びそれを遂行する方法が、下記の実施例に対する詳細な説明及び添付図面を参照することにより、さらに容易に理解できる。しかし、本発明は多くの多様な形態で実施でき、ここで言及した実施例に限定されて構成されるものではない。
【0018】
本発明の一つの実施例によるSAWセンサーデバイスは、試料チャンバー、該試料チャンバーと連結されているSAWセンサー、該SAWセンサーと連結されており、SAWセンサーを通過した流体試料を担持する廃棄チャンバー、及び上記の試料チャンバー、SAWセンサー、及び廃棄チャンバーを連結するチャンネルからなる本体部を含み、流体の流れを制御する流体制御部が、上記本体部の外部に位置するものからなっている。
【0019】
また、本発明の一つの実施例によるSAWセンサーデバイスの流体制御方法は、試料チャンバーと、SAWセンサーと、該SAWセンサーを通過した試料を担持する廃棄チャンバーと、を連結するチャンネルからなる本体部の外部に位置する流体制御部から提供される移送駆動力を利用して、前記試料チャンバー内の流体を前記SAWセンサー方向に水平移動させる段階を含んでいる。
【0020】
従来のSAWセンサーデバイスでは、流体制御部がチャンバーとSAWセンサーとの間の流路またはチャンネルに装着されており、流体試料による流体制御部の汚染がノイズ発生の主なる原因となった。
【0021】
しかし、本発明の実施例によると、流体制御部が本体部の外部に位置するため、チャンバーまたはSAWセンサーと直接接触しない構造を持つ。従って、流体制御部の汚染及びノイズの発生を防止することができる。
【0022】
一例として、上記の流体制御部は、本体部の垂直上部面上に位置できる。ここで、本体部の平面に対して垂直上部面を意味する(図3のy軸参照)。このような構造によると、試料チャンバーの垂直上部から流体を制御するため、外力の印加無しでは流体が流体制御部と接触する可能性が根本的に排除される。例えば、本体部の上段をカバーするカバー部上に流体制御部が装着された構造が挙げられる。
【0023】
これと関連して、図1には本発明の一実施例によるSAWセンサーデバイスの断面図が模式的に図示されており、図2にはその平面図が、図3にはその斜視図がそれぞれ模式的に図示されている。これを図面を参照して具体的に説明する。
【0024】
本実施例によるSAWセンサーデバイス(100)は、本体部(200)と本体部(200)の上段面をカバーするカバー部(300)、及びカバー部(300)上に位置する流体制御部(310)からなっており、本体部(200)は流体を担持する試料チャンバー(211、212)、第1のチャンネル(510)により試料チャンバー(211、212)と連結されているSAWセンサー(400)、及び第2のチャンネル(520)によりSAWセンサー(400)と連結されている廃棄チャンバー(220)からなっている。
【0025】
上記の流体制御部(310)は、流体の出入を制御したり流速を制御したりするための装置であって、例えば、空気の流入/流出により流体の流れを制御する装置であり得る。このような例としては、流体の出入を制御するバルブ(valve;321、322、323、324)及び/又は流圧または流速を制御するポンプ(pump;330)が挙げられる。
【0026】
上記のバルブ(321、322、323、324)はSAWセンサーデバイス(100)作動中に、SAWセンサーの表面にサンプル溶液を投入するか否かを制御する。上記のバルブ(321、322、323、324)は流体の出入を制御するため、少なくともサンプル溶液が担持された試料チャンバー(211、212)と連結されていて、場合により、図示されたように試料チャンバー(211、212)及び廃棄チャンバー(220)にそれぞれ連結されることができる。
【0027】
上記のポンプ(330)は流体の流れを制御する機能を行うため、ポンプ(330)でかけられる圧力がチャンネルのネットワークを通じて試料チャンバー(211、212)内の流体がSAWセンサー(400)を経て廃棄チャンバー(220)に移動できる。具体的に上記のポンプ(330)は、チャンバー内の圧力を加圧あるいは減圧させて試料チャンバー(211、212)内の流体がSAWセンサー(400)を経て廃棄チャンバー(220)に移動できる移送駆動力を提供し、流量を調節することができる。
【0028】
上記のポンプ(330)は、陽圧/陰圧の形態に応じてチャンバー内の圧力を加圧あるいは減圧させる。そこで、SAWセンサー(400)に流入される流体を担持した試料チャンバー(211、212)側に位置することもでき、図示されたようにSAWセンサー(400)から排出される流体を担持した廃棄チャンバー(220)側に位置することもできる。
【0029】
一例として、デバイスの流入部側に陽圧ポンプ(図示しない)が位置できる。例えば、試料チャンバー(211、212)と連結されたバルブ(321、322)と陽圧ポンプを連結し、廃棄チャンバー(220)を加圧させると、陽圧ポンプから排出された空気がバルブ(321、322)を通じて試料チャンバー(211、212)内に流入され、これによる圧力により流体がSAWセンサー(400)方向にチャンネルに沿って移動できるようになる。
【0030】
また別の例として、上記SAWセンサーデバイス(100)の流出部側に陰圧ポンプ(330)が位置できる。例えば、廃棄チャンバー(220)と連結されたバルブ(323)と陰圧ポンプ(330)を連結して廃棄チャンバー(220)−SAWセンサー(400)−試料チャンバー(211、212)に順次に圧力をかけることができる。即ち、試料チャンバー(211、212)を喚起させることにより廃棄チャンバー内の空気の圧力を下げると、試料チャンバー(211、212)内の流体がSAWセンサー(400)−廃棄チャンバー(220)方向に移動できる。
【0031】
また、流入部側に陽圧ポンプを装着し、流出部側には陰圧ポンプ(330)を装着することもできる。
【0032】
流体制御部(310)は、流体を制御するために本体部(200)と直接的または間接的に連結することもできる。そこで、図示されたようにバルブ(321、322、323、324)は、試料チャンバー(211、212)及び廃棄チャンバー(220)にそれぞれ連結されており、バルブ(323)はポンプ(330)と連結されている。これにより、ポンプ(330)−バルブ(323)−チャンバー(220)が連結された構造を持つことができる。このとき、上記の連結は直接的連結だけでなく、間接的連結及び機能的連結を含む意味である。
【0033】
上記のバルブ(321、322、323、324)及び/又はポンプ(330)とチャンバーを連結するための一例として、チャンバー(211、212、220)の表面に所定の開口部(250)を形成し、これにより対応する部位にチャンネルなどを連結し、バルブ及び/又はポンプと連結できる。
【0034】
例えば、上記のバルブは試料チャンバー(211、212)及び/又は廃棄チャンバー(220)と垂直方向に連結することもできる。この場合、チャンバーに圧力がかけられるに所要される移送距離及び時間を最小化することができる。
【0035】
また別の例として、上記のチャンバー(211、212、220)は、流体が流入または流出できるように少なくとも一つの開口部(250)を持つことができる。例えば、流体制御部(310)などのような外部装置と連結するための開口部(250)と内部のSAWセンサー(400)または他のチャンバーと連結するための開口部(260)からなり得る。また、それぞれの開口部(250、260)にはチャンネルが結合されており、流路を形成することができる。
【0036】
図1〜図3によると、試料チャンバー(211、212)及び廃棄チャンバー(220)にそれぞれ第1の開口部(250)を形成し、これと対応する垂直上段カバー部(300)に第2の開口部(350)を形成し、第2の開口部(350)がバルブ(321)と連結された構造が図示されている。しかし、チャンバー(211、212、220)とバルブ(321)が連通できる構造であれば、特に制限されるものではない。
【0037】
一例として、流体制御の信頼性を高めて流体と流体制御部(310)の接触を防止するため,上記流体制御部(310)を含む上記カバーを上記本体部に連結する開口部にO‐リング(ring)などのような密閉機構(360)を装着することができる。
【0038】
このような流体制御部(310)は本体部(200)と分離され独立的に装着することもでき、本体部(200)と一体として形成することもでき、特に限定されるものではない。
【0039】
上記の流体制御部(310)はまた、プラグ、障害物、または装置により流体の流れを変更するバッフル(baffle)などを含むことができる。
【0040】
上記のSAWセンサーデバイスは、所定の試料チャンバー(211、212)及び廃棄チャンバー(220)を含む。上記の試料チャンバー(211、212)は、SAWセンサー(400)を経ていない流体を担持するためのチャンバーであり、廃棄チャンバー(220)は、SAWセンサー(400)を経た状態の流体を担持するためのチャンバーである。
【0041】
上記の試料チャンバー(211、212)は一つ以上であり得、それぞれ互いに異なる流体を含むことができる。上記流体の例としては、ターゲット物質を含む溶液(以下、‘ターゲットサンプル’ともいう)、2次反応溶液、基準溶液、洗浄液などが挙げられるが、これに限定されるものではなく、上記のターゲットサンプルは一つ以上であり得る。
【0042】
上記のターゲットサンプルはターゲット物質を含む溶液であって、上記の‘ターゲット物質’はSAWセンサー(400)を通じて感知しようとする対象物質を意味する。
【0043】
上記のターゲット物質は、蛋白質、抗体、抗原、DNA、RNA、ウイルス、バクテリア(Bacterial cell)、動物細胞(Animal cell)、組織(Tissue)などの生体分子またはこれにより発生されたToxinなどのBio productsなどが挙げられるが、これに限定されるものではない。
【0044】
また、上記のターゲットサンプルは生物学的サンプルであり得、例えば、唾液、痰、脳脊髄液、血液、血清、プラズマ、小便、生検物質などが挙げられるが、これに限定されるものではない。
【0045】
基準溶液は、必要により洗浄液と同一溶液を使用することもできる。
【0046】
上記の基準溶液は、ターゲットサンプルに対応してシグナル分析の対比になる流体を意味する。上記の基準溶液は、粘度、伝導性、密度などの特性がターゲットサンプルと類似するものであり得、例えば、バッファー溶液などが上げられる。
【0047】
一例として、上記のチャンバー(211、212、220)の側面は、所定の勾配のテーパー形状(240)になっていることもある。このように、所定の勾配を持つ場合、流体の移動距離を減らし、流体の移動時に加速力を提供することができ、不必要な流体損失(loss)を減らすことができる。
【0048】
上記の勾配は、例えば、約1°〜60°または約5°〜30°であり得るが、これに限定されるものではない。
【0049】
本実施例によるSAWセンサーデバイスにおいて、チャンバーとSAWセンサー(400)の相互間は、チャンネルにより互いに連通できる構造を持つ。
【0050】
上記のチャンネルは、上記の試料チャンバー(211、212)とSAWセンサー(400)との間を連結するチャンネル(第1のチャンネル;510)と上記のSAWセンサー(400)と廃棄チャンバー(220)を連結するチャンネル(第2のチャンネル;250)を含むことができ、更なるチャンバーまたは装置が付加される場合、これを連結するためのチャンネルを含むことができる。
【0051】
上記本体部(200)の内部に形成されたチャンネル(510、520)は流体の流路を形成するため、外力がかけられていない状態またはデバイスの非作動状態で流体が移動することを防止できる構造であり得る。
【0052】
上記の試料チャンバー(211、212)とSAWセンサー(400)との間を連結する第のチャンネル(510)は、流体が試料チャンバー(211、212)の下段から上向した後、SAWセンサー(400)の上段面に流入できる構造であり得る。このような構造を持つ場合、外力によらずには試料チャンバー(211、212)内の流体がチャンネルに沿って移動できなくなるため、流体の流出を容易に制御できる。
【0053】
図1には、第1のチャンネル(510)が試料チャンバー(211、212)のSAWセンサー(400)側の側面下部から垂直上向した後、SAWセンサー(400)の上段面に垂直下向する構造を形成している。
【0054】
また、上記のSAWセンサー(400)と廃棄チャンバー(220)を連結する第2のチャンネル(520)は、流体がSAWセンサー(400)の上段面から垂直に上向した後、廃棄チャンバー(220)に流入できる構造であり得る。この場合、廃棄チャンバー(220)に移動した流体がSAWセンサー(400)側方向に逆流することを防止することができる。
【0055】
図1には、第2のチャンネル(520)がSAWセンサー(400)の上段から垂直に上向した後、廃棄チャンバー(220)のSAWセンサー(400)側の上段部に連結された構造を形成している。また、第2のチャンネル(520)がSAWセンサー(400)の上段から垂直に上向した後、廃棄チャンバー(220)のSAWセンサー(400)側の下段部に連結された構造であり得、この場合、廃棄チャンバー(220)内の溶液が逆流をさらに効果的に遮断することができる。
【0056】
上記第1のチャンネル(510)及び第2のチャンネル(520)の形状は、これに限定されるものではなく、チャンバーとSAWセンサー(400)を相互連結する構造であれば、本発明の範囲内に含まれることは言うまでもない。
【0057】
また、外部装置と連結するための外部チャンネルを含むことができる。このような外部チャンネル(540、550)または開口部(250)は図示されたように、チャンバー上段の高さ以上に形成できる。これにより、流体の移送駆動力を提供する外圧がチャンバーの上部から下部に導入できる。一方、上記の外部チャンネル(540、550)または開口部(250)はバルブなどと連動して、外圧の導入時に喚起するためのチャンバーの開閉を制御することが可能である。
【0058】
上記の試料チャンバーまたは廃棄チャンバーは一つ以上であって、2つまたは3つであり得、それぞれのチャンバー相互間またはチャンバーとSAWセンサーとの連結は、相互通気できる形態であれば特に制限されなく、多様であり得る。
【0059】
上記のSAWセンサー(400)は特に制限されなく、表面弾性波を利用してターゲット物質の特性を感知する装置である。一般的に、SAWセンサー(400)は圧電特性(Piezoelectricity)を有する基板(410)上に一対のIDT(Inter Digital Transducer)金属電極が形成された構造からなっている。
【0060】
上記の基板(410)をなす圧電物質は、機械的信号の印加時に電気的特性が変化したり(圧電効果)、電気的信号の印加時に機械的信号が生じたりする(逆圧電効果)材料である。例えば、ニオブ酸リチウム(例;LiNbO3)、タンタル酸リチウム(例;LiTaO3)、四ホウ素酸リチウム(Li2B4O7)、チタン酸バリウム(BaTiO3)、PbZrO3、PbTiO3、PZT(PbZrxTi1−xO3)、ZnO、GaAs、石英(Quartz)、ニオブ酸塩などが挙げられる。
【0061】
上記のIDT(図示しない)は、電気回路と音波遅延線(acoustic delay line;図示しない)と間のインターフェースであって、アルミニウム合金、銅合金、金などの薄膜金属から形成できるが、これに限定されない。
【0062】
上記一対のIDTで一つのIDTは、印加されたシグナルにより表面弾性波を発生させるため、これを‘入力(input)IDT’または‘送信器(transmitter)’という。このとき発生された表面弾性波は、基板の表面に沿って適切な周波数で膨張と圧縮によりもう一つのIDTに伝達され、逆圧電効果により電気的信号に変換される。この後者のIDTを‘出力(output)IDT’または‘受信器(receiver)’という。
【0063】
上記のSAWセンサー(400)の表面には、ターゲットサンプル内に存在するターゲット物質と結合できるレセプター(receptor;図示しない)が固定できる。上記のレセプターは、ターゲット物質と特異的に反応できる物質であれば、特に制限されない。
【0064】
例えば、蛋白質、抗原、抗体、酵素、DNA、RNA、PNA(peptide nucleic acid、人工DNA)、細胞、及び嗅覚神経(olfactory)などが挙げられる。
【0065】
SAWセンサー(400)は流体の種類、ターゲット物質またはレセプターの種類により複数個であり得る。また、SAWセンサー(400)は表面弾性波を誘発する装置によりシグナルを生成させることができ、上記の表面弾性波の誘発装置としては発信器(Oscillator)(600)などが挙げられるが、これに限定されない。
【0066】
本発明の例示的なSAWセンサーデバイス(100)において流体の移動過程を見てみると、以下の通りである。まず、バルブ(323)をゲーティングしてからポンプ(330)を駆動させると、空気の流入により圧力がチャンバーにかけられる。外部からかけられた空気は、チャンバーの上段に集められるようになり空気の圧力勾配が発生し、これにより流体が移動するようになる。即ち、流体はポンプ(330)と連結されたバルブ(323)のゲーティングにより試料チャンバー(211、212)から、第1のチャンネル(510)に沿ってSAWセンサー(400)の入口ポートに移動する。SAWセンサー(400)を通じて流れた後、出口ポートを通じて第1の廃棄チャンバー(220)に移動する。
【0067】
即ち、所望のチャンバーのバルブ(321)をゲーティングすると、流体の流入により上昇されたチャンバー内の圧力が除去され、溶液が容易に進入できるようになる。反対に、バルブ(321)及び開口部(250、350)を閉じると、流体の流入による圧力が相殺されなくて流体の進入ができない。これにより、バルブ(321、322、323、324)をSAWセンサーデバイスの内部に形成することなく、所望の部位に流体を制御することができる。
【0068】
従って、ターゲットサンプルの汚染による分析誤謬を最小化でき、高価なバルブ(321、322、323、324)、ポンプ(330)などの流体制御部(310)を繰り返して再使用できるという長所がある。
【0069】
一方、空気の流入/流出により流体の流れを制御することにおいて、空気により発生した気泡は、SAW基板に流入される場合はノイズとして作用し、シグナルの変化を起こすことができる。即ち、流体1を注入した後、試料チャンバー(211)内の流体を流体2に交替する場合、流体1の注入による気泡によりノイズが発生し、流体2のセンシングは信頼性が落ちる。
【0070】
これを防止するために、SAW基板デバイスはノイズを除去するために気泡を捕集するチャンバーを更に含むことができる。
【0071】
一例として、図1〜図3に図示されたように、SAWセンサーに気泡が流入されることを防止するために、上記の試料チャンバー(211、212)とSAW基板との間に、気泡を捕集するための第2の廃棄チャンバー(230)がチャンネル(530)により連結された構造であり得る。
【0072】
このような構造のデバイスの作動過程を例示的に見てみると、流体1をSAWセンサー(400)に移動させた後、チャンネル内に含まれた気泡を第2の廃棄チャンバー(230)に捕集し、流体2をSAWセンサー(400)に移動させることができる。
【0073】
図1〜図3に図示されたように、廃棄チャンバー(220)側の上段面上に形成されたバルブ(323)にポンプ(330)が連結されている場合、デバイスの作動順序は以下の通りである。
【0074】
(a) 第1の廃棄チャンバー(220)上のバルブ(323)をゲーティングして流体1チャンバー(211)の圧力を増加させ、流体1をSAWセンサー(400)に注入する。
【0075】
(b) 第2の廃棄チャンバー(230)上のバルブ(324)をゲーティングして流体2チャンバーの圧力を増加させることにより、チャンネルに残存していた溶液及び気泡を第2の廃棄チャンバー(230)に捕集する。
【0076】
(c) 第1の廃棄チャンバー(220)上のバルブ(323)をゲーティングして流体2チャンバー(212)の圧力を増加させ、溶液2をSAWセンサー(400)に注入する。
【0077】
本発明はまた、試料内のターゲット物質を分析するためのシステムを提供する。一例として、上記のシステムは、
(i) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されている第1のSAWセンサーデバイス(以下、場合により‘テストSAWセンサーデバイス’という)及び、
(ii) ターゲットサンプルと反応するレセプターがSAWセンサーの表面に固定化されていない第2のSAWセンサーデバイス(以下、場合により‘対照SAWセンサーデバイス’という)から構成できる。
【0078】
このようなシステムにおいて、ターゲット物質がテストSAWセンサーデバイスでセンサー表面のレセプターに結合することにより表わされたシグナルと、対照SAWセンサーデバイスのシグナルの違いにより、ターゲットサンプルの有無及び定量を行うことができる。
【0079】
また本発明は、上記のSAWセンサーデバイスを利用した流体制御方法を提供する。一例による流体制御方法は、上記のSAWセンサーデバイスで本体部(200)の外部に位置する流体制御部(310)から提供された移送駆動力により、試料チャンバー(211、212)内の流体をSAWセンサー(400)方向に水平移動させる段階を含む。
【0080】
上記の移送駆動力は、例えば気圧であり得る。そこで、流体制御部(310)は外部に位置して本体部(200)に空気を伝達する機能をするため、流体と流体制御部(310)が直接的に接触しない。従って、流体制御部(310)が流体により汚染されることを根本的に防止することができる。
【0081】
本発明の一実施例によるSAWセンサーデバイス(100)を利用したセンシング(Sensing)過程は、SAWセンサーデバイスを共振器(Oscillator;600)に装着し、これを発振させてシグナルを安定化させる段階、試料チャンバー(211、212)内の基準溶液をSAWセンサー(400)に注入して発振シグナルをベースライン(base line)に設定する過程、及び、試料チャンバー(211、212)内のターゲットサンプルをSAWセンサー(400)に注入して発振シグナルを観察する過程、を含むことができる。
【0082】
上記のシグナルは周波数、phase、amplitudeなどであり得る。上記のターゲットサンプルが、上記の試料チャンバー(211、212)からSAWセンサー(400)に移動すると、SAWセンサー(400)の表面に付着したレセプターとターゲットサンプル内のターゲット物質が反応して波長変化を誘発する。そこで、ベースラインとターゲットサンプル注入時の波長変化の違いにより、ターゲットサンプル内のターゲット物質の存否、含量、種類などが検出できる。
【0083】
上記において、SAWセンサー(400)を経た流体は廃棄チャンバー(220)に移動され廃棄される。
【0084】
必要により、流体を流動させた後、SAWセンサー(400)に気泡が流入されないように、チャンネルに残存する気泡を除去する過程をさらに経ることができる。また、測定が終了した後、洗浄溶液でSAWセンサーデバイスを洗浄し、シグナル変化を再測定することもできる。
【0085】
本発明が属する分野で通常の知識を有する者であれば、上記の内容を基に本発明の範疇内で多様な応用及び変形を行うことが可能であろう。
【符号の説明】
【0086】
100 SAWセンサーデバイス、
200 本体部、
300 カバー部、
400 SAWセンサー。
【特許請求の範囲】
【請求項1】
試料チャンバー、
上記の試料チャンバーと連結されているSAWセンサー、
上記のSAWセンサーと連結されており、SAWセンサーを通過した試料を担持する廃棄チャンバー、及び
上記の試料チャンバー、SAWセンサー、及び廃棄チャンバーを連結するチャンネルからなる本体部;を含み、
流体の流れを制御する流体制御部が、上記本体部の外部に位置するものからなるSAWセンサーデバイス。
【請求項2】
上記の流体制御部は、本体部の垂直上部面上に位置する、請求項1に記載のSAWセンサーデバイス。
【請求項3】
上記本体部の上段をカバーするカバー部;を含み、流体制御部が上記のカバー部に位置する、請求項1に記載のSAWセンサーデバイス。
【請求項4】
上記の流体制御部は、空気の流入/流出により流体の流れを制御する装置である、請求項1に記載のSAWセンサーデバイス。
【請求項5】
上記の流体制御部は、バルブ(valve)及び/又はパンプ(pump)である、請求項1に記載のSAWセンサーデバイス。
【請求項6】
上記のバルブは、試料チャンバー及び廃棄チャンバーにそれぞれ連結されている、請求項5に記載のSAWセンサーデバイス。
【請求項7】
上記のパンプは、陽圧パンプまたは陰圧パンプである、請求項5に記載のSAWセンサーデバイス。
【請求項8】
上記のパンプは、流体の流入部側及び/又は流出部側に位置する、請求項5に記載のSAWセンサーデバイス。
【請求項9】
上記の試料チャンバー及び廃棄チャンバーはそれぞれ外部と連結できる開口部を含み、上記の開口部は本体部外部の流体制御部と連結された、請求項1に記載のSAWセンサーデバイス。
【請求項10】
上記の試料チャンバーまたは廃棄チャンバーの側面はテーパーされている、請求項1に記載のSAWセンサーデバイス。
【請求項11】
上記テーパーの勾配は5°〜30°である、請求項10に記載のSAWセンサーデバイス。
【請求項12】
上記の流体は、ターゲット物質を含む溶液、基準溶液、洗浄液及び緩衝液からなる群から選択された少なくとも一つである、請求項1に記載のSAWセンサーデバイス。
【請求項13】
上記の試料チャンバーとSAWセンサーとの間を連結するチャンネル(‘第1のチャンネル’)は、流体が試料チャンバーの下段から上向した後、SAWセンサーの上段面に流入できる構造である、請求項1に記載のSAWセンサーデバイス。
【請求項14】
上記第1のチャンネルは、試料チャンバーのSAWセンサー側の側面下部から垂直に上向した後、SAWセンサーの上段面に垂直下向する構造である、請求項13に記載のSAWセンサーデバイス。
【請求項15】
上記のSAWセンサーと廃棄チャンバーを連結するチャンネル(‘第2のチャンネル’)は、流体がSAWセンサーの上段面から上向した後、廃棄チャンバーに流入できる構造である、請求項1に記載のSAWセンサーデバイス。
【請求項16】
上記第2のチャンネルは、SAWセンサーの上段面から垂直に上向した後、廃棄チャンバーの上段面と水平に連結された構造である、請求項15に記載のSAWセンサーデバイス。
【請求項17】
上記の試料チャンバーとSAWセンサーとの間に第2の廃棄チャンバーがチャンネルにより連結されている、請求項1に記載のSAWセンサーデバイス。
【請求項18】
上記第2の廃棄チャンバーは外部と連結できる開口部を含み、開口部は本体部外部の流体制御部と連結された、請求項17に記載のSAWセンサーデバイス。
【請求項19】
請求項1によるSAWセンサーデバイスにおいて、SAWセンサーの表面にレセプターが固定されている第1のSAWセンサーデバイス;及び、
請求項1によるSAWセンサーデバイスにおいて、SAWセンサーの表面にレセプターが固定されていない第2のSAWセンサーデバイス;を含む、SAWセンサーシステム。
【請求項20】
請求項1によるSAWセンサーデバイスにおいて、本体部の外部に位置する流体制御部から提供された移送駆動力により、試料チャンバー内の流体をSAWセンサー方向に水平移動させる段階;を含む、SAWセンサーデバイスの流体制御方法。
【請求項21】
上記の移送駆動力は気圧である、請求項20に記載のSAWセンサーデバイスの流体制御方法。
【請求項1】
試料チャンバー、
上記の試料チャンバーと連結されているSAWセンサー、
上記のSAWセンサーと連結されており、SAWセンサーを通過した試料を担持する廃棄チャンバー、及び
上記の試料チャンバー、SAWセンサー、及び廃棄チャンバーを連結するチャンネルからなる本体部;を含み、
流体の流れを制御する流体制御部が、上記本体部の外部に位置するものからなるSAWセンサーデバイス。
【請求項2】
上記の流体制御部は、本体部の垂直上部面上に位置する、請求項1に記載のSAWセンサーデバイス。
【請求項3】
上記本体部の上段をカバーするカバー部;を含み、流体制御部が上記のカバー部に位置する、請求項1に記載のSAWセンサーデバイス。
【請求項4】
上記の流体制御部は、空気の流入/流出により流体の流れを制御する装置である、請求項1に記載のSAWセンサーデバイス。
【請求項5】
上記の流体制御部は、バルブ(valve)及び/又はパンプ(pump)である、請求項1に記載のSAWセンサーデバイス。
【請求項6】
上記のバルブは、試料チャンバー及び廃棄チャンバーにそれぞれ連結されている、請求項5に記載のSAWセンサーデバイス。
【請求項7】
上記のパンプは、陽圧パンプまたは陰圧パンプである、請求項5に記載のSAWセンサーデバイス。
【請求項8】
上記のパンプは、流体の流入部側及び/又は流出部側に位置する、請求項5に記載のSAWセンサーデバイス。
【請求項9】
上記の試料チャンバー及び廃棄チャンバーはそれぞれ外部と連結できる開口部を含み、上記の開口部は本体部外部の流体制御部と連結された、請求項1に記載のSAWセンサーデバイス。
【請求項10】
上記の試料チャンバーまたは廃棄チャンバーの側面はテーパーされている、請求項1に記載のSAWセンサーデバイス。
【請求項11】
上記テーパーの勾配は5°〜30°である、請求項10に記載のSAWセンサーデバイス。
【請求項12】
上記の流体は、ターゲット物質を含む溶液、基準溶液、洗浄液及び緩衝液からなる群から選択された少なくとも一つである、請求項1に記載のSAWセンサーデバイス。
【請求項13】
上記の試料チャンバーとSAWセンサーとの間を連結するチャンネル(‘第1のチャンネル’)は、流体が試料チャンバーの下段から上向した後、SAWセンサーの上段面に流入できる構造である、請求項1に記載のSAWセンサーデバイス。
【請求項14】
上記第1のチャンネルは、試料チャンバーのSAWセンサー側の側面下部から垂直に上向した後、SAWセンサーの上段面に垂直下向する構造である、請求項13に記載のSAWセンサーデバイス。
【請求項15】
上記のSAWセンサーと廃棄チャンバーを連結するチャンネル(‘第2のチャンネル’)は、流体がSAWセンサーの上段面から上向した後、廃棄チャンバーに流入できる構造である、請求項1に記載のSAWセンサーデバイス。
【請求項16】
上記第2のチャンネルは、SAWセンサーの上段面から垂直に上向した後、廃棄チャンバーの上段面と水平に連結された構造である、請求項15に記載のSAWセンサーデバイス。
【請求項17】
上記の試料チャンバーとSAWセンサーとの間に第2の廃棄チャンバーがチャンネルにより連結されている、請求項1に記載のSAWセンサーデバイス。
【請求項18】
上記第2の廃棄チャンバーは外部と連結できる開口部を含み、開口部は本体部外部の流体制御部と連結された、請求項17に記載のSAWセンサーデバイス。
【請求項19】
請求項1によるSAWセンサーデバイスにおいて、SAWセンサーの表面にレセプターが固定されている第1のSAWセンサーデバイス;及び、
請求項1によるSAWセンサーデバイスにおいて、SAWセンサーの表面にレセプターが固定されていない第2のSAWセンサーデバイス;を含む、SAWセンサーシステム。
【請求項20】
請求項1によるSAWセンサーデバイスにおいて、本体部の外部に位置する流体制御部から提供された移送駆動力により、試料チャンバー内の流体をSAWセンサー方向に水平移動させる段階;を含む、SAWセンサーデバイスの流体制御方法。
【請求項21】
上記の移送駆動力は気圧である、請求項20に記載のSAWセンサーデバイスの流体制御方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−2442(P2011−2442A)
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2009−230605(P2009−230605)
【出願日】平成21年10月2日(2009.10.2)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】SAMSUNG ELECTRONICS CO.,LTD.
【住所又は居所原語表記】416,Maetan−dong,Yeongtong−gu,Suwon−si,Gyeonggi−do 442−742(KR)
【Fターム(参考)】
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成21年10月2日(2009.10.2)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】SAMSUNG ELECTRONICS CO.,LTD.
【住所又は居所原語表記】416,Maetan−dong,Yeongtong−gu,Suwon−si,Gyeonggi−do 442−742(KR)
【Fターム(参考)】
[ Back to top ]