
TABの検査装置
【課題】 TABの検査装置において、パンチ穴を形成する際のTABの移送の減速、停止に拘らず自動的に各デバイスの適正な検査を行う。
【解決手段】 TABを移送する移送手段と、TABの各デバイスを画像として取得する画像取得手段と、取得した画像と予め登録された基準画像とを対比してデバイスの欠陥の有無を判定する判定手段と、欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ装置25とを有するTABの検査装置であって、ラインセンサ20,21を用いて、TABの移送中で幅方向の直線画像を連続的に取得してデバイス全体の画像を取得するように画像取得手段を構成し、かつ、TABを連続移送すると共に、欠陥の存在が判定されたデバイスX1がパンチ装置25の対応位置に移送したときにTABの移送を停止し、かつ、移送再開時に、後続の未判定のデバイスがラインセンサ20,21の上流側まで戻るように移送手段を制御する。
【解決手段】 TABを移送する移送手段と、TABの各デバイスを画像として取得する画像取得手段と、取得した画像と予め登録された基準画像とを対比してデバイスの欠陥の有無を判定する判定手段と、欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ装置25とを有するTABの検査装置であって、ラインセンサ20,21を用いて、TABの移送中で幅方向の直線画像を連続的に取得してデバイス全体の画像を取得するように画像取得手段を構成し、かつ、TABを連続移送すると共に、欠陥の存在が判定されたデバイスX1がパンチ装置25の対応位置に移送したときにTABの移送を停止し、かつ、移送再開時に、後続の未判定のデバイスがラインセンサ20,21の上流側まで戻るように移送手段を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、TABの欠陥等を検査するTABの検査装置に関し、物品検査の技術分野に属する。
【背景技術】
【0002】
近年、ICチップの小型・薄型のパッケージとして、ポリイミド等の樹脂フィルムをパンチング加工した後に、銅箔等を張り合わせ、フォトエッチング等で回路パターンを形成したTABが開発されている。TABには、多数の回路パターンが一定のピッチで繰り返して形成されており、1チップに対応する回路パターンの領域(以下、パターンの単位を「デバイス」という)の断線などの欠陥を検査する装置として、各種のものが提案されている。
【0003】
例えば特許文献1には、TABを移送する移送手段と、TABを照明する光源と、TABの画像を撮像するCCDカメラと、該CCDカメラで撮像された1デバイスの画像と予め記憶された基準画像とを対比することにより欠陥の有無の判定を行うコンピュータと、欠陥TABを識別する目印としてのパンチ穴を形成するパンチ装置とを有する検査装置が開示されている。
【0004】
また、特許文献2〜4には、TABをICテスタのテスト結果に基いて選別するためのTAB用オートハンドラについて開示されている。
【0005】
このTAB用オートハンドラは、移送手段と、TABの移送経路にTABの上部にプッシャ及び下部にプローブカードを有するICテスタと、該ICテスタの下流側に配置されたパンチ装置と、前記ICテスタの上流側と前記パンチ装置の下流側にそれぞれTABの画像を取得するためのカメラとを有している。
【0006】
そして、前記プッシャが降下することによりTABがプローブカードに接触し、1デバイスごとの回路パターンの電気的特性が測定され、この特性に応じてパンチ装置によりパンチ穴が形成される。また、前記カメラは、取得した画像データに基いて、TABの有無、ICチップの有無、パンチ穴の有無を検出するようになっている。
【特許文献1】特開2000−182061号公報
【特許文献2】特開平7−86355号公報
【特許文献3】特開平7−239366号公報
【特許文献4】特開2002−328151号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、前記特許文献1に開示された検査装置は、TABがパンチ装置の下方に配置されるたびに一旦停止するように間欠駆動するように構成されており、前記特許文献2〜4に開示されたTAB用オートハンドラは、プッシャが降下する際にTABの移送が停止され、移送手段を間欠駆動させることになる。そして、このような間欠駆動は、検査能率の低下を招く。
【0008】
一方、前記特許文献1の検査装置のように画像による判定を行うものにおいては、デバイスの全体画像を撮像するカメラに代えてTABの幅方向の直線画像を撮像するラインセンサを用いることが考えられる。このラインセンサを用いれば、移送しながら画像を取得することができ、連続送りで検査することができると共に、画像を組み合わせることにより精度の良い1デバイスの画像が作成されるという利点がある。
【0009】
しかしながら、このようなラインセンサで画像を取得するように構成された装置では、次のような問題の発生が考えられる。即ち、図13(a)に示すように、TABの移送に伴って連続的に判定が行われた場合、デバイスX1の欠陥の存在が判定されたときに該デバイスX1の後続のデバイスの検査が継続され、図13(b)に示すように、前記デバイスX1がパンチ装置200によりパンチ穴pを形成すべき位置Lに到達したときにTABの移送が停止される。このとき、ラインセンサ210により画像取得中のデバイスXaについては、精度の良い画像が取得できずに、適正な検査が行われないことになる。
【0010】
そこで、本発明は、TABの検査装置において、ラインセンサにより画像を取得するように構成すると共に、パンチ穴を形成する際のTABの移送の減速、停止に拘らず自動的に各デバイスの適正な検査を行うことを課題とする。
【課題を解決するための手段】
【0011】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0012】
まず、本願の請求項1に記載の発明は、多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスがパンチ手段の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、かつ、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段が備えられていることを特徴とする。
【0013】
また、請求項2に記載の発明は、前記請求項1に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、欠陥の存在が判定されたデバイスに対するパンチ穴の形成後、移送再開時に、ラインセンサ上にデバイスが位置するときは、そのデバイスが該センサの上流側まで戻るように、移送手段を制御することを特徴とする。
【0014】
一方、請求項3に記載の発明は、前記請求項1に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とする。
【0015】
また、請求項4に記載の発明は、前記請求項1に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、前記欠陥の非存在が判定されたデバイス又は次のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とする。
【0016】
一方、請求項5に記載の発明は、多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、前記画像取得手段とパンチ手段との間に配置され、前記判定手段によって欠陥の存在が判定されたデバイスを目視により欠陥の有無を判断するための顕微鏡と、該顕微鏡による判断結果に応じてパンチ処理又は非パンチ処理を選択する処理選択手段と、TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスが顕微鏡の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、前記処理選択手段によりパンチ処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスをパンチ手段の対応位置に移送するように移送手段を作動させると共に、この後、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御し、かつ、前記処理選択手段により非パンチ処理が選択されたときは、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段とが備えられていることを特徴とする。
【0017】
また、請求項6に記載の発明は、前記請求項5に記載のTABの検査装置において、前記処理選択手段は、再検査処理を選択可能とされ、前記移送制御手段は、該処理選択手段により再検査処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御することを特徴とする。
【0018】
さらに、請求項7に記載の発明は、前記請求項5または請求項6に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、当該デバイスが顕微鏡に対応位置するときに移送手段を停止させることを特徴とする。
【0019】
そして、請求項8に記載の発明は、前記請求項5または請求項6に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とする。
【0020】
また、請求項9に記載の発明は、前記請求項5または請求項6に記載のTABの検査装置において、前記移送手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とする。
【0021】
そして、請求項10に記載の発明は、前記請求項4または請求項9に記載のTABの検査装置において、前記判定手段によって所定回数以上連続して欠陥の存在が判定されたときに、装置を停止させる装置停止手段が備えられていることを特徴とする。
【発明の効果】
【0022】
まず、請求項1に記載の発明によれば、移送手段は、通常検査時には、所定の移送速度でTABを移送するように制御されおり、ラインセンサは、該センサ上を通過するTABの幅方向の直線画像を連続的に取得し、この直線画像を組み合わせることによってデバイス全体の画像が作成される。そして、判定手段は、デバイス全体の画像と予め登録された基準画像とを対比することによってデバイスの欠陥の有無を判定する。このとき、欠陥の存在が判定されたデバイスについては、パンチ手段の対応位置に移送、停止される。このときのTABの移送の減速停止に伴って、未判定のデバイスや中途半端に画像取得されたデバイスがラインセンサの下流側に存在することになるが、これらのデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスについての適正な検査が行われることになる。
【0023】
また、請求項2に記載の発明によれば、判定手段により欠陥の存在が判定されても、移送手段を停止させることなく作動させて、後続のデバイスに対する判定が継続して行われ、欠陥の存在が判定されたデバイスがパンチ手段に対応位置したときに、TABの移送が停止される。そして、パンチ穴形成後、移送再開時に、パンチ穴形成の際にラインセンサ上の中途半端な位置で停止したデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0024】
一方、請求項3に記載の発明によれば、判定手段により欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させ、欠陥の存在が判定されたデバイスをパンチ手段の対応位置まで移送、停止させる。そして、パンチ穴形成後、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0025】
さらに、請求項4に記載の発明によれば、判定手段により欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断して、欠陥の存在が判定されたデバイスをパンチ手段の対応位置まで移送、停止させる。そして、1又は複数の欠陥の存在が判定されたデバイスについてのパンチ穴形成後、移送再開時に、欠陥の非存在が判定されたデバイス又は次のデバイスがラインセンサの上流側まで戻るように制御手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスについての適正な検査が行われることになる。さらにこの発明においては、連続して欠陥の存在が判定されたデバイスについては、まとめてパンチ穴が形成されるので、TABの往復頻度が低減され、検査の能率化が実現される。
【0026】
一方、請求項5に記載の発明によれば、移送手段は、通常検査時には、所定の移送速度でTABを移送するように制御されており、ラインセンサは、該センサ上を通過するTABの幅方向の直線画像を連続的に取得し、この直線画像を組み合わせることによってデバイス全体の画像が作成される。そして、判定手段は、デバイス全体の画像と予め登録された基準画像とを対比することによってデバイスの欠陥の有無を判定する。このとき、欠陥の存在が判定されたデバイスについては、顕微鏡の対応位置に移送、停止される、そして、作業者は、顕微鏡により当該デバイスについての欠陥の有無を判断し、処理選択手段によりパンチ処理或いは非パンチ処理を選択する。
【0027】
作業者が欠陥の存在の判断をし、パンチ処理の選択がなされたときは、当該デバイスは、パンチ手段の対応位置に移送、停止される。そして、当該デバイスについてのパンチ穴形成後、ラインセンサの下流側に存在する未判定のデバイスがラインセンサの上流側に戻るように移送手段が制御される。
【0028】
また、作業者が判定手段による判定結果を覆し、当該デバイスについて欠陥の非存在の判断をし、非パンチ処理の選択がなされたときは、当該デバイスは、欠陥の非存在の判定がなされたものとみなされて、ラインセンサの下流側に存在する未判定のデバイスがラインセンサの上流側に戻るように移送手段が制御される。
【0029】
このように、本発明においては、顕微鏡又はパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスについての適正な検査が行われる。しかも、判定手段による欠陥の有無の判定に加えて、作業者の目視による欠陥の有無の判断が行われるので、誤判定が防止され、検査精度の向上が実現される。
【0030】
また、請求項6に記載の発明によれば、判定手段により欠陥の存在が判定されたデバイスについて再度ラインセンサにより画像を取得し、再度判定を行うようにした再検査処理が選択可能であるので、作業者による顕微鏡の目視の結果、欠陥の有無の判断が微妙なときなどに、再検査処理が選択されることになり、検査精度の一層の向上が実現される。
【0031】
また、請求項7に記載の発明によれば、判定手段により欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定が継続して行われ、欠陥の存在が判定されたデバイスがパンチ手段に対応位置したときに、TABの移送が停止される。そして、パンチ処理、非パンチ処理、又は再検査処理のいずれかの処理の際に、ラインセンサ上に中途半端な位置で停止したデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、顕微鏡及びパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0032】
さらに、請求項8に記載の発明によれば、判定手段により欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させ、欠陥の存在が判定されたデバイスを顕微鏡の対応位置まで移送、停止させる。そして、パンチ処理、非パンチ処理、又は再検査処理のいずれかの処理の際に、後続の未判定のデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、顕微鏡及びパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0033】
また、請求項9に記載の発明によれば、判定手段により欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断して、欠陥の存在が判定されたデバイスを顕微鏡の対応位置まで移送、停止させる。そして、1又は複数の欠陥の存在が判定されたデバイスについてのパンチ処理、非パンチ処理、又は再検査処理のいずれかの処理の際に、後続の未判定のデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、顕微鏡及びパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0034】
一方、ラインセンサのレンズにごみ等が付着したり、装置の故障等が生じた場合に、欠陥の非存在にも拘らず、連続して欠陥の存在が判定されることがある。これに対して、請求項10に記載の発明によれば、所定回数以上連続して欠陥の存在が判定されたときに、装置停止手段により装置が停止されるので、検査が無駄に継続することが防止される。
【発明を実施するための最良の形態】
【0035】
以下、本発明の実施の形態について説明する。
【0036】
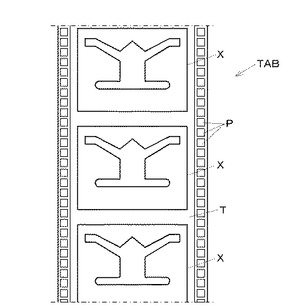
図1に示すように、本実施の形態に係るTABの検査装置1は、図2に示すようなテープ状のTABの欠陥等を検査するものである。TABは、幅方向両端に沿って連続的にパーフォレーションP…Pが設けられたフィルムテープTに、1チップごとに回路パターン(以下、パターンの単位を「デバイスX」という)が一定のピッチで繰り返して設けられたものであり、前記検査装置1は、各デバイスXを順次検査するようになっている。
【0037】
図1に示すように、前記検査装置1は、機枠2と、該機枠2に設けられて前記TABが巻き掛けられた巻出リール10と、該巻出リール10から繰り出されたTABを案内するプーリ11,11と、蛇行防止のために備えられてTABのパーフォレーションP…Pに係合する複数のスプロケットホイール12a〜12eと、同一水平面上に配置されてTABを移送させる第1〜第3駆動ローラ13a〜13cと、TABを巻き取る巻取リール14とを有している。
【0038】
また、TABの移送経路に沿って、上流側から、TAB表面にごみや塵等の接着を防止するためにTAB表面の静電気を取り除く除電気15と、エア吸引作用によりTAB表面の異物を取り除く除塵装置16と、TAB表面の金属異物を取り除く磁性粉除去磁石17と、TAB表面の異物を取り除く粘着ロール18と、TABの各デバイスXの下流側のエッジを検出する光電センサ19と、TABの幅方向の直線画像を連続的に取得する第1、第2ラインセンサ20,21と、TABを斜め上方から照明する第1投光機22と、TABを裏面から照明する第2投光機23と、作業者がTABの拡大画像を目視するための顕微鏡24と、TABにパンチ穴を形成するパンチ装置25と、TAB表面のごみを取り除くごみ取りロール26とが備えられている。また、前記第1、第2ラインセンサ20,21により取得した画像等の表示を行う第1、第2検査用モニタ27,28が備えられている。
【0039】
一方、巻出リール10に巻き掛けられたTABは、TABと保護シートSとが重ねられた状態で巻き掛けられており、該巻出リール10からTABが繰り出されると同時に保護シートSが分離するようになっている。そして、分離した保護シートSを案内する複数のプーリ29a〜29dと、中央のプーリ29b,29cの間に設けられて自重により保護シートSのテンションを適正化するダンサローラ30とが設けられ、これらに案内された保護シートSは、巻取リール10によりTABが巻き取られる際に同時に巻き取られ、巻取リール14においてはTABと保護シートSとが重ねられた状態で巻き取られるようになっている。
【0040】
さらに、前記顕微鏡24とパンチ装置25との間に備えられたスプロケットホイール12dは、該ホイール12dの回転量の情報に基いて、TABの移送距離及び移送速度の情報を取得するエンコーダ12d′に連絡されている一方、第1〜第3駆動ローラ13a〜13cのうちの上流側の第1駆動ローラ13aは、エンコーダ12d′で取得した速度情報に基いて回転数のフィードバック制御を行うようになっている。
【0041】
また、第1駆動ローラ13aの下流側の第2、第3駆動ローラ13b,13cは、TABのテンションを最適化する回転数に設定されている。そして、第1〜第3駆動ローラ13a〜13cの上方には、TABを上方から押圧する押付けローラ13a′〜13c′が備えられている。なお、押付けローラ13a′〜13c′は、TABのパーフォレーションP…Pが設けられた幅方向両端部を押圧するようになっており、TABのテンションを適正化するために作用する。
【0042】
一方、図3に示すように、この検査装置1には、互いに信号の授受を行う搬送用コントローラ100と画像用コントローラ110とが備えられている。搬送用コントローラ100は、前記エンコーダ12d′、光電センサ19、及び作業者がデータ等を入力するキーボード101、タッチパネル102等からの信号を入力し、第1〜第3駆動ローラ13a〜13c、及びパンチ装置25などに制御信号を出力するようになっている。また、前記画像用コントローラ110は、前記エンコーダ12d′、第1、第2ラインセンサ20,21等からの信号を入力し、第1、第2検査用モニタ27,28などに制御信号を出力するようになっている。
【0043】
前記第1投光機22は、移送中のTABの斜め上方から光の照射を行うように配置され、第1ラインセンサ20は、該第1投光機22の照明による反射光を連続的に検出するようになっている。また、前記第2投光機23は、移送中のTABの下方から光の照射を行うように配置され、第2ラインセンサ21は、該第2投光機23の照明による透過光を連続的に検出するようになっている。そして、前記画像用コントローラ110は、第1ラインセンサ20から取得したTABの幅方向の直線画像を組み合わせて1デバイスの画像を作成し、第2ラインセンサ21で取得した画像も同様にして1デバイスの画像を作成する。さらに、前記画像用コントローラ110に内蔵されたメモリ100aには、デバイスXの基準画像が格納されており、この基準画像と第1、第2ラインセンサ20,21により取得したデバイスXの画像で作成されたそれぞれの画像とを対比することにより、各デバイスXの欠陥の存在(以下、「NG」という)又は欠陥の非存在(以下、「OK」という)が判定される。
【0044】
一方、判定結果は、搬送用コントローラ100に入力され、これに応じてTABの移送制御が行われる。第1、第2ラインセンサ20,21で取得した画像により作成したデバイスXの画像が、共にOK判定されたときは、当該デバイスXについての検査は終了されて後続のデバイスXの検査が開始されるが、いずれか一方又は両方がNG判定されたデバイスXは、前記顕微鏡24により目視できる位置(以下、「顕微鏡位置」という)又は前記パンチ装置25によりパンチ穴が形成されるべき位置(以下、「パンチ位置」という)に移送され、後続のデバイスXについての検査が一旦中断される。
【0045】
検査開始時には、前記光電センサ19はフィルムテープTに設けられた先頭のデバイスXの下流側のエッジを検出する。そして、このデバイスXが光電センサ19により検知された位置から所定距離上流側の基準位置に移送され、TABの初期位置の設定が完了する。また、作業者は、予めTABのピッチ等の情報を前記キーボード101により入力し、これらの情報に基いて、各デバイスXを移送すべき、基準位置から前記第1、第2ラインセンサ20,21までの距離、基準位置から顕微鏡位置までの距離、基準位置からパンチ位置までの距離等が計算される。そして、前記エンコーダ12d′による移送距離の情報に基いて、第1、第2ラインセンサ20,21による画像取得開始のタイミングと画像取得終了のタイミングとが計算される。
【0046】
ところで、NG判定されたデバイスXの扱いについて、パンチモードと顕微鏡モードとがあり、作業者が予めタッチパネル102を操作することにより選択できるようになっている。
【0047】
まず、作業者によりパンチモードが選択されたときの制御について図4のフローチャートに基いて説明する。
【0048】
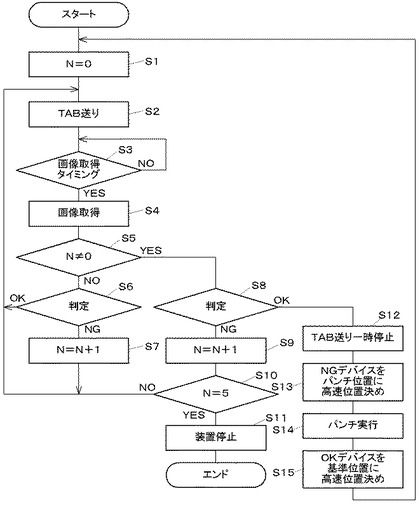
まず、ステップS1でNをゼロに初期化する。次に、ステップS2で、TABが所定速度で連続的に移送される。そして、ステップS3で、画像取得のタイミングか否かを判定し、画像取得のタイミングになればステップS4に進み、第1ラインセンサ20により取得した直線画像に基いて1デバイスの画像を作成し、第2ラインセンサ21により取得した直線画像に基いて同様に1デバイスの画像を作成する。
【0049】
次に、ステップS5で、N≠0か否かを判定し、N=0のときは、ステップS6に進み、当該デバイスXについての欠陥の有無の判定を行う。このとき、前記ステップS4で作成された2つの画像と基準画像とを対比することによりデバイスXの欠陥の有無が判定される。そして、前記ステップS6でOK判定がされた場合は、ステップS2に戻って後続のデバイスXについて同様に判定が行われる。また、ステップS6でNG判定がされた場合は、ステップS7に進み、NにN+1を代入し、ステップS2に戻る。
【0050】
一方、ステップS5でN≠0のときは、ステップS8に進み、当該デバイスXについての欠陥の有無の判定を行う。ステップS8でOK判定のときは、後述するパンチ制御を実行し、NG判定のときは、ステップS9に進み、NにN+1を代入し、ステップS10に進む。ステップS10では、N=5か否かが判定され、N=1〜4のとき、つまり1〜4回連続してNG判定されているときはステップS2に戻る。ステップS10で、N=5のとき、つまり5回連続してNG判定されているときはステップS11に進み、アラームを報知すると共に装置を停止させ、制御を終了する。
【0051】
そして、ステップS12〜S15で行われる前記パンチ制御では、まず、ステップS12でTABの送りを一時停止させ、次にステップS13で、NG判定されたデバイスXをパンチ位置に高速で移送する。なお、複数のNG判定されたデバイスXが検出されているときは、最下流のデバイスXをパンチ位置に高速で移送し、停止させる。そして、ステップS14で、停止したデバイスXにパンチ装置25によりパンチ穴を形成する。なお、複数のNG判定されたデバイスXが検出されているときは、最下流のデバイスXのパンチ作業が終了すると、該デバイスXの上流側のデバイスXがパンチ位置に位置するようにTABが所定距離移送され、この上流側のデバイスXにパンチ穴が形成される。そして、このようにして全てのNG判定されたデバイスX…Xについてのパンチ作業が終了すると、ステップS15で、これらのデバイスXの上流側のOK判定されたデバイスXが基準位置に戻るように、TABが移送され、続いて、ステップS1に戻り、Nを初期化した上で、検査を再開するようになっている。
【0052】
次に、本制御を図5、6に示す動作図に基いて説明する。
【0053】
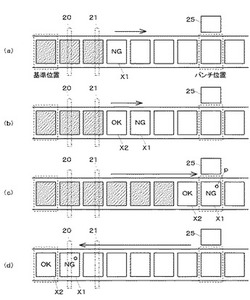
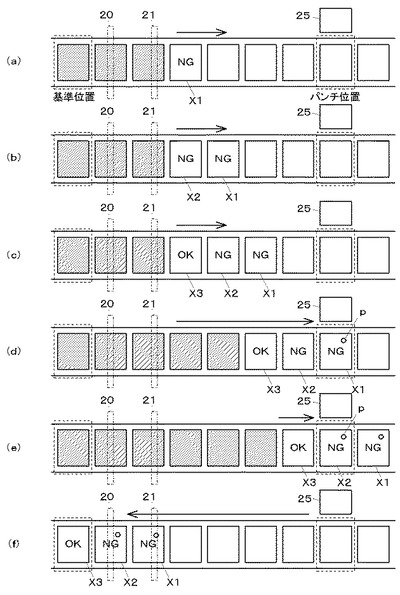
図5(a)に示すように、デバイスX1が、第1、第2ラインセンサ20,21を通過し、NG判定されている。そして、図5(b)に示すように、該デバイスX1の後続のデバイスX2がOK判定されている。この場合、図5(c)に示すように、前記デバイスX1がパンチ位置に高速で移送される。そして、パンチ装置25により当該デバイスX1にパンチ穴pが形成され、図5(d)に示すように、前記デバイスX2が基準位置に戻され、検査が再開される。なお、図5中、未判定のデバイスXには斜線を施している。
【0054】
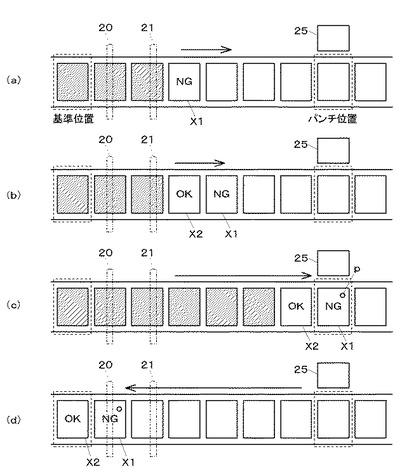
また、図6(a)に示すように、デバイスX1が、第1、第2ラインセンサ20,21を通過し、NG判定されている。そして、図6(b)に示すように、該デバイスX1の後続のデバイスX2もNG判定されており、図6(c)に示すように、該デバイスX2の後続のデバイスX3がOK判定されている。この場合、図6(d)に示すように、前記デバイスX1がパンチ位置まで移送され、パンチ装置25により当該デバイスX1にパンチ穴pが形成される。そして、図6(e)に示すように、TABを少し移送することにより前記デバイスX2がパンチ位置まで移送され、パンチ装置25により当該デバイスX2にパンチ穴pが形成される。次に、図6(f)に示すように、前記デバイスX3が基準位置に戻され、検査が再開される。
【0055】
以上のように、本制御によれば、NG判定されたデバイスXがパンチ位置まで移送され、該デバイスXにパンチ穴pが形成された後、未判定のデバイスXが第1、第2ラインセンサ20,21の上流側に戻るように制御され、検査が再開されるので、パンチ装置25のパンチ動作によるTABの移送の減速、停止に拘らず、自動的に適正な検査を行うことができる。
【0056】
また、NG判定される度にパンチ位置まで移送し、パンチ穴を開けるので、判定結果のデータの蓄積が回避され、データ処理系の負担を低減することができる。さらに、NG判定がされる度にデバイスXをパンチ位置まで移送し、戻す動作を行うと、連続してNG判定がされたときにTABが頻繁に往復移動することになって作業能率の低下が懸念されるが、前述のように、NG判定の後に、OK判定がなされたときに、NG判定されたデバイスXをパンチ位置に移送する作業が行われ、連続するNG判定されたデバイスX…Xについてはまとめてパンチ作業が行われるので、作業能率の低下が回避される。
【0057】
さらに、検査中に、例えば第1、第2ラインセンサ20,21のレンズ部分にごみが付着した場合や、装置の故障等の問題が生じた場合に、OKであるにも拘らずNG判定が連続してなされることになる。しかしながら、前述のように、5回以上NG判定が連続したときに、自動的に装置を停止させるように制御されるので、前述のような問題が発生している場合に、検査が無駄に継続することが防止される。
【0058】
ところで、本発明の他の実施の形態として、NG判定されたときでも検査を継続させ、NG判定されたデバイスXがパンチ位置に到達したときに、TABの位相を停止させてパンチ穴を形成するように制御するものがある。
【0059】
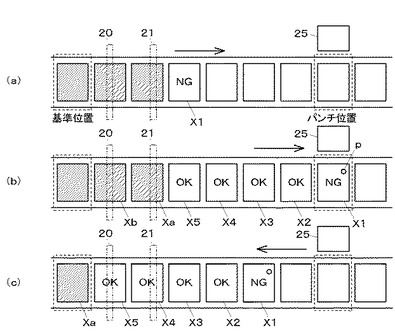
即ち、図7(a)に示すように、デバイスX1についてNG判定がなされた後、図7(b)に示すように、デバイスX2〜X5についてOK判定が連続し、NG判定されたデバイスX1がパンチ位置に到達したときに、TABの移送は停止され、当該デバイスX1はパンチ装置25によりパンチ穴pが形成される。このとき、第1、第2ラインセンサ20,21により画像取得中のデバイスXa、Xbが存在し、このまま検査を再開した場合、当該デバイスXa、Xbについて適正な画像が取得できず、検査精度が確保できないことになる。そこで、図7(c)に示すように、当該デバイスXa,Xbが基準位置に戻るようにTABを移送し、この後、検査を再開するように制御される。なお、前記デバイスXaについては、第1ラインセンサ20には正常な画像が取得されているので、パンチ動作の後に、デバイスXbが基準位置に戻るように制御し、デバイスXbについては第2ラインセンサ21のみの画像を再取得するようにして検査を再開するようにしてもよい。
【0060】
このような制御においても、パンチ装置25によるパンチ動作の際のTABの移送の減速、停止に拘らず、自動的に各デバイスXについての適正な検査が行われることになる。
【0061】
一方、作業者により顕微鏡モードが選択されたときの動作について図8のフローチャートに基いて説明する。なお、このフローチャートのステップS21〜S32は、図4のパンチモードにおけるステップS1〜S12と同様であるので、説明を省略する。
【0062】
即ち、ステップS32でTABの送りを一時停止した後、ステップS33でNGデバイスを顕微鏡位置に高速で移送し、停止させる。次に、ステップS34に進み、NG制御を実行する。
【0063】
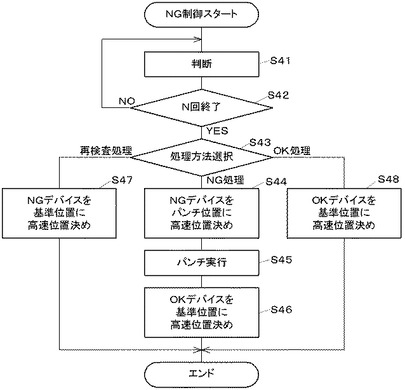
図9に示すように、NG制御においては、まずステップS41で、作業者がNGデバイスXを目視により確認し、当該デバイスXについてのOK又はNGを判定し、タッチパネル102により判定結果を入力する。そして、ステップS42で、判定がN回終了したか否か、即ちNGデバイスX…Xの全てについて判定が終了したか否かを判定し、N回終了していないときはステップS41に戻る。なお、複数のNGデバイスX…Xが存在するときは、まず、最下流のNGデバイスXについて判定が行われ、判定結果をタッチパネル102により入力すると、該デバイスXの上流隣のデバイスXが顕微鏡位置に移送され、作業者は同様に判定し、判定結果を入力するようになっている。このようにして、全てのNGデバイスX…Xについて作業者の目視による判定が行われる。
【0064】
そして、ステップS42でN回の判定が終了したときは、ステップS43に進み、これらのNGデバイスX…Xについての処理方法を選択する。このとき、タッチパネル102には、NGデバイスXをパンチして次のデバイスXから検査再開(以下、「NG処理」という)、NGデバイスXより再検査(以下、「再検査処理」という)、NGデバイスXをパンチせず次のOKデバイスXから検査再開(以下、「OK処理」という)の3通りの処理の選択画面が表示される。
【0065】
ステップS43で、NG処理が選択されたときは、ステップS44で、NGデバイスXがパンチ位置に高速で移送、停止される。そして、ステップS45でパンチ装置25によりNGデバイスXにパンチ穴が形成される。なお、複数のNGデバイスX…Xが判定されているときは、前記パンチモード時と同様に、下流側のデバイスXから順次パンチ穴を形成するように制御される。次に、ステップS46で、OKデバイスXを基準位置に高速で移送、停止させ、NG制御を終了し、ステップS21に戻る。
【0066】
また、ステップS43で、再検査処理が選択されたときは、ステップS47で、NGデバイスXを基準位置に高速で移送、停止させ、NG制御を終了し、ステップS21に戻る。
【0067】
さらに、ステップS43でOK処理が選択されたときは、ステップS48で、OKデバイスXを基準位置に高速で移送、停止させ、NG制御を終了し、ステップS21に戻る。
【0068】
次に、この顕微鏡モードのNG制御について図10〜12の動作図を用いて説明する。
【0069】
まず、図10(a)に示すように、デバイスX1についてNG判定がなされ、図10(b)に示すように、デバイスX1の次のデバイスX2についてOK判定がなされている。この場合、TABの移送を一時停止した後、図10(c)に示すように、前記デバイスX1を顕微鏡位置に高速で移送し、停止させる。
【0070】
そして、顕微鏡での目視判定の結果、当該デバイスX1をNGとして扱うときに、作業者がタッチパネル102で「NG処理」を選択する。このとき、図10(d)に示すように、デバイスX1がパンチ位置まで高速で移送、停止され、デバイスX1にはパンチ穴pが形成され、図10(e)に示すように、デバイスX2が基準位置に戻るように制御され、該デバイスX2から検査が再開される。
【0071】
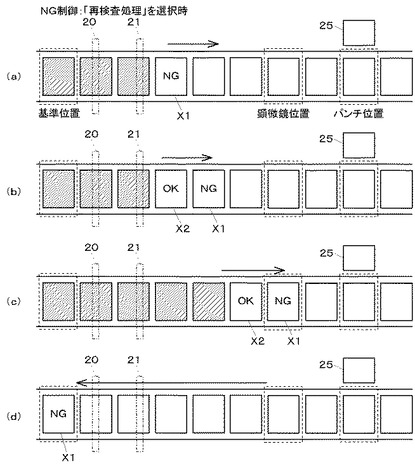
また、図11(a)〜図11(c)は、前記図10(a)〜図10(c)と同様であって、顕微鏡での目視判定の結果、判定が微妙なときなど、もう一度検査し直したいときに、作業者がタッチパネル102で「再検査処理」を選択する。このとき、図11(d)に示すように、デバイスX1が基準位置に戻るように制御され、該デバイスX1から検査が再開される。
【0072】
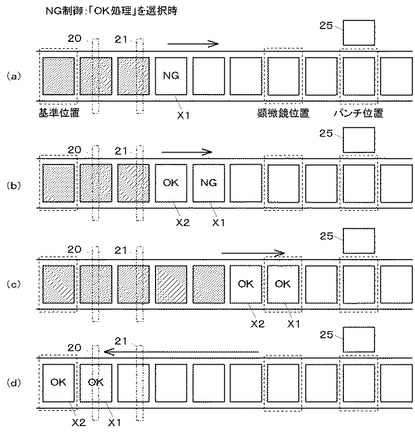
また、図12(a)〜図12(c)は、前記図10(a)〜図10(c)と同様であって、顕微鏡での目視判定の結果、作業者が当該デバイスX1について、明らかに欠陥の存在が認められずに、OKであると判定したときに、作業者がタッチパネル102で「OK処理」を選択する。このとき、デバイスX1についてはOK判定されたものとみなされ、図12(d)に示すように、デバイスX2が基準位置に戻るように制御され、該デバイスX2から検査が再開される。
【0073】
以上のように、顕微鏡モードでは、画像用コントローラ110による画像判定と、顕微鏡24を用いた作業者の目視による判定との2段階の判定が行われるので、検査精度が向上する。さらに、作業者はタッチパネル102を適宜操作するだけで、自動的に前述の各処理が行われることになって、装置の操作性が向上する。
【産業上の利用可能性】
【0074】
本発明は、TABの欠陥等の検査を行う検査装置に関し、製造産業に広く好適である。
【図面の簡単な説明】
【0075】
【図1】本発明の実施の形態に係る検査装置の正面図である。
【図2】TABの説明図である。
【図3】検査装置のシステム図である。
【図4】パンチモードの制御を示すフローチャートである。
【図5】同じく動作図である。
【図6】同じく動作図である。
【図7】パンチモードの他の制御例に係る動作図である。
【図8】顕微鏡モードの制御を示すフローチャートである。
【図9】同じくフローチャートである。
【図10】同じく動作図である。
【図11】同じく動作図である。
【図12】同じく動作図である。
【図13】従来の問題点の説明図である。
【符号の説明】
【0076】
1 検査装置
10 巻出リール
13a〜13c 駆動ローラ
20 第1ラインセンサ
21 第2ラインセンサ
25 パンチ装置
100 搬送用コントローラ
102 タッチパネル
110 画像用コントローラ
X デバイス
【技術分野】
【0001】
本発明は、TABの欠陥等を検査するTABの検査装置に関し、物品検査の技術分野に属する。
【背景技術】
【0002】
近年、ICチップの小型・薄型のパッケージとして、ポリイミド等の樹脂フィルムをパンチング加工した後に、銅箔等を張り合わせ、フォトエッチング等で回路パターンを形成したTABが開発されている。TABには、多数の回路パターンが一定のピッチで繰り返して形成されており、1チップに対応する回路パターンの領域(以下、パターンの単位を「デバイス」という)の断線などの欠陥を検査する装置として、各種のものが提案されている。
【0003】
例えば特許文献1には、TABを移送する移送手段と、TABを照明する光源と、TABの画像を撮像するCCDカメラと、該CCDカメラで撮像された1デバイスの画像と予め記憶された基準画像とを対比することにより欠陥の有無の判定を行うコンピュータと、欠陥TABを識別する目印としてのパンチ穴を形成するパンチ装置とを有する検査装置が開示されている。
【0004】
また、特許文献2〜4には、TABをICテスタのテスト結果に基いて選別するためのTAB用オートハンドラについて開示されている。
【0005】
このTAB用オートハンドラは、移送手段と、TABの移送経路にTABの上部にプッシャ及び下部にプローブカードを有するICテスタと、該ICテスタの下流側に配置されたパンチ装置と、前記ICテスタの上流側と前記パンチ装置の下流側にそれぞれTABの画像を取得するためのカメラとを有している。
【0006】
そして、前記プッシャが降下することによりTABがプローブカードに接触し、1デバイスごとの回路パターンの電気的特性が測定され、この特性に応じてパンチ装置によりパンチ穴が形成される。また、前記カメラは、取得した画像データに基いて、TABの有無、ICチップの有無、パンチ穴の有無を検出するようになっている。
【特許文献1】特開2000−182061号公報
【特許文献2】特開平7−86355号公報
【特許文献3】特開平7−239366号公報
【特許文献4】特開2002−328151号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、前記特許文献1に開示された検査装置は、TABがパンチ装置の下方に配置されるたびに一旦停止するように間欠駆動するように構成されており、前記特許文献2〜4に開示されたTAB用オートハンドラは、プッシャが降下する際にTABの移送が停止され、移送手段を間欠駆動させることになる。そして、このような間欠駆動は、検査能率の低下を招く。
【0008】
一方、前記特許文献1の検査装置のように画像による判定を行うものにおいては、デバイスの全体画像を撮像するカメラに代えてTABの幅方向の直線画像を撮像するラインセンサを用いることが考えられる。このラインセンサを用いれば、移送しながら画像を取得することができ、連続送りで検査することができると共に、画像を組み合わせることにより精度の良い1デバイスの画像が作成されるという利点がある。
【0009】
しかしながら、このようなラインセンサで画像を取得するように構成された装置では、次のような問題の発生が考えられる。即ち、図13(a)に示すように、TABの移送に伴って連続的に判定が行われた場合、デバイスX1の欠陥の存在が判定されたときに該デバイスX1の後続のデバイスの検査が継続され、図13(b)に示すように、前記デバイスX1がパンチ装置200によりパンチ穴pを形成すべき位置Lに到達したときにTABの移送が停止される。このとき、ラインセンサ210により画像取得中のデバイスXaについては、精度の良い画像が取得できずに、適正な検査が行われないことになる。
【0010】
そこで、本発明は、TABの検査装置において、ラインセンサにより画像を取得するように構成すると共に、パンチ穴を形成する際のTABの移送の減速、停止に拘らず自動的に各デバイスの適正な検査を行うことを課題とする。
【課題を解決するための手段】
【0011】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0012】
まず、本願の請求項1に記載の発明は、多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスがパンチ手段の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、かつ、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段が備えられていることを特徴とする。
【0013】
また、請求項2に記載の発明は、前記請求項1に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、欠陥の存在が判定されたデバイスに対するパンチ穴の形成後、移送再開時に、ラインセンサ上にデバイスが位置するときは、そのデバイスが該センサの上流側まで戻るように、移送手段を制御することを特徴とする。
【0014】
一方、請求項3に記載の発明は、前記請求項1に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とする。
【0015】
また、請求項4に記載の発明は、前記請求項1に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、前記欠陥の非存在が判定されたデバイス又は次のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とする。
【0016】
一方、請求項5に記載の発明は、多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、前記画像取得手段とパンチ手段との間に配置され、前記判定手段によって欠陥の存在が判定されたデバイスを目視により欠陥の有無を判断するための顕微鏡と、該顕微鏡による判断結果に応じてパンチ処理又は非パンチ処理を選択する処理選択手段と、TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスが顕微鏡の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、前記処理選択手段によりパンチ処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスをパンチ手段の対応位置に移送するように移送手段を作動させると共に、この後、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御し、かつ、前記処理選択手段により非パンチ処理が選択されたときは、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段とが備えられていることを特徴とする。
【0017】
また、請求項6に記載の発明は、前記請求項5に記載のTABの検査装置において、前記処理選択手段は、再検査処理を選択可能とされ、前記移送制御手段は、該処理選択手段により再検査処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御することを特徴とする。
【0018】
さらに、請求項7に記載の発明は、前記請求項5または請求項6に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、当該デバイスが顕微鏡に対応位置するときに移送手段を停止させることを特徴とする。
【0019】
そして、請求項8に記載の発明は、前記請求項5または請求項6に記載のTABの検査装置において、前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とする。
【0020】
また、請求項9に記載の発明は、前記請求項5または請求項6に記載のTABの検査装置において、前記移送手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とする。
【0021】
そして、請求項10に記載の発明は、前記請求項4または請求項9に記載のTABの検査装置において、前記判定手段によって所定回数以上連続して欠陥の存在が判定されたときに、装置を停止させる装置停止手段が備えられていることを特徴とする。
【発明の効果】
【0022】
まず、請求項1に記載の発明によれば、移送手段は、通常検査時には、所定の移送速度でTABを移送するように制御されおり、ラインセンサは、該センサ上を通過するTABの幅方向の直線画像を連続的に取得し、この直線画像を組み合わせることによってデバイス全体の画像が作成される。そして、判定手段は、デバイス全体の画像と予め登録された基準画像とを対比することによってデバイスの欠陥の有無を判定する。このとき、欠陥の存在が判定されたデバイスについては、パンチ手段の対応位置に移送、停止される。このときのTABの移送の減速停止に伴って、未判定のデバイスや中途半端に画像取得されたデバイスがラインセンサの下流側に存在することになるが、これらのデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスについての適正な検査が行われることになる。
【0023】
また、請求項2に記載の発明によれば、判定手段により欠陥の存在が判定されても、移送手段を停止させることなく作動させて、後続のデバイスに対する判定が継続して行われ、欠陥の存在が判定されたデバイスがパンチ手段に対応位置したときに、TABの移送が停止される。そして、パンチ穴形成後、移送再開時に、パンチ穴形成の際にラインセンサ上の中途半端な位置で停止したデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0024】
一方、請求項3に記載の発明によれば、判定手段により欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させ、欠陥の存在が判定されたデバイスをパンチ手段の対応位置まで移送、停止させる。そして、パンチ穴形成後、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0025】
さらに、請求項4に記載の発明によれば、判定手段により欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断して、欠陥の存在が判定されたデバイスをパンチ手段の対応位置まで移送、停止させる。そして、1又は複数の欠陥の存在が判定されたデバイスについてのパンチ穴形成後、移送再開時に、欠陥の非存在が判定されたデバイス又は次のデバイスがラインセンサの上流側まで戻るように制御手段が制御されるので、パンチ穴形成の際の移送の減速、停止に拘らず、自動的に各デバイスについての適正な検査が行われることになる。さらにこの発明においては、連続して欠陥の存在が判定されたデバイスについては、まとめてパンチ穴が形成されるので、TABの往復頻度が低減され、検査の能率化が実現される。
【0026】
一方、請求項5に記載の発明によれば、移送手段は、通常検査時には、所定の移送速度でTABを移送するように制御されており、ラインセンサは、該センサ上を通過するTABの幅方向の直線画像を連続的に取得し、この直線画像を組み合わせることによってデバイス全体の画像が作成される。そして、判定手段は、デバイス全体の画像と予め登録された基準画像とを対比することによってデバイスの欠陥の有無を判定する。このとき、欠陥の存在が判定されたデバイスについては、顕微鏡の対応位置に移送、停止される、そして、作業者は、顕微鏡により当該デバイスについての欠陥の有無を判断し、処理選択手段によりパンチ処理或いは非パンチ処理を選択する。
【0027】
作業者が欠陥の存在の判断をし、パンチ処理の選択がなされたときは、当該デバイスは、パンチ手段の対応位置に移送、停止される。そして、当該デバイスについてのパンチ穴形成後、ラインセンサの下流側に存在する未判定のデバイスがラインセンサの上流側に戻るように移送手段が制御される。
【0028】
また、作業者が判定手段による判定結果を覆し、当該デバイスについて欠陥の非存在の判断をし、非パンチ処理の選択がなされたときは、当該デバイスは、欠陥の非存在の判定がなされたものとみなされて、ラインセンサの下流側に存在する未判定のデバイスがラインセンサの上流側に戻るように移送手段が制御される。
【0029】
このように、本発明においては、顕微鏡又はパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスについての適正な検査が行われる。しかも、判定手段による欠陥の有無の判定に加えて、作業者の目視による欠陥の有無の判断が行われるので、誤判定が防止され、検査精度の向上が実現される。
【0030】
また、請求項6に記載の発明によれば、判定手段により欠陥の存在が判定されたデバイスについて再度ラインセンサにより画像を取得し、再度判定を行うようにした再検査処理が選択可能であるので、作業者による顕微鏡の目視の結果、欠陥の有無の判断が微妙なときなどに、再検査処理が選択されることになり、検査精度の一層の向上が実現される。
【0031】
また、請求項7に記載の発明によれば、判定手段により欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定が継続して行われ、欠陥の存在が判定されたデバイスがパンチ手段に対応位置したときに、TABの移送が停止される。そして、パンチ処理、非パンチ処理、又は再検査処理のいずれかの処理の際に、ラインセンサ上に中途半端な位置で停止したデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、顕微鏡及びパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0032】
さらに、請求項8に記載の発明によれば、判定手段により欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させ、欠陥の存在が判定されたデバイスを顕微鏡の対応位置まで移送、停止させる。そして、パンチ処理、非パンチ処理、又は再検査処理のいずれかの処理の際に、後続の未判定のデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、顕微鏡及びパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0033】
また、請求項9に記載の発明によれば、判定手段により欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断して、欠陥の存在が判定されたデバイスを顕微鏡の対応位置まで移送、停止させる。そして、1又は複数の欠陥の存在が判定されたデバイスについてのパンチ処理、非パンチ処理、又は再検査処理のいずれかの処理の際に、後続の未判定のデバイスがラインセンサの上流側まで戻るように移送手段が制御されるので、顕微鏡及びパンチ手段の対応位置におけるTABの移送の減速、停止に拘らず、自動的に各デバイスの適正な検査が行われることになる。
【0034】
一方、ラインセンサのレンズにごみ等が付着したり、装置の故障等が生じた場合に、欠陥の非存在にも拘らず、連続して欠陥の存在が判定されることがある。これに対して、請求項10に記載の発明によれば、所定回数以上連続して欠陥の存在が判定されたときに、装置停止手段により装置が停止されるので、検査が無駄に継続することが防止される。
【発明を実施するための最良の形態】
【0035】
以下、本発明の実施の形態について説明する。
【0036】
図1に示すように、本実施の形態に係るTABの検査装置1は、図2に示すようなテープ状のTABの欠陥等を検査するものである。TABは、幅方向両端に沿って連続的にパーフォレーションP…Pが設けられたフィルムテープTに、1チップごとに回路パターン(以下、パターンの単位を「デバイスX」という)が一定のピッチで繰り返して設けられたものであり、前記検査装置1は、各デバイスXを順次検査するようになっている。
【0037】
図1に示すように、前記検査装置1は、機枠2と、該機枠2に設けられて前記TABが巻き掛けられた巻出リール10と、該巻出リール10から繰り出されたTABを案内するプーリ11,11と、蛇行防止のために備えられてTABのパーフォレーションP…Pに係合する複数のスプロケットホイール12a〜12eと、同一水平面上に配置されてTABを移送させる第1〜第3駆動ローラ13a〜13cと、TABを巻き取る巻取リール14とを有している。
【0038】
また、TABの移送経路に沿って、上流側から、TAB表面にごみや塵等の接着を防止するためにTAB表面の静電気を取り除く除電気15と、エア吸引作用によりTAB表面の異物を取り除く除塵装置16と、TAB表面の金属異物を取り除く磁性粉除去磁石17と、TAB表面の異物を取り除く粘着ロール18と、TABの各デバイスXの下流側のエッジを検出する光電センサ19と、TABの幅方向の直線画像を連続的に取得する第1、第2ラインセンサ20,21と、TABを斜め上方から照明する第1投光機22と、TABを裏面から照明する第2投光機23と、作業者がTABの拡大画像を目視するための顕微鏡24と、TABにパンチ穴を形成するパンチ装置25と、TAB表面のごみを取り除くごみ取りロール26とが備えられている。また、前記第1、第2ラインセンサ20,21により取得した画像等の表示を行う第1、第2検査用モニタ27,28が備えられている。
【0039】
一方、巻出リール10に巻き掛けられたTABは、TABと保護シートSとが重ねられた状態で巻き掛けられており、該巻出リール10からTABが繰り出されると同時に保護シートSが分離するようになっている。そして、分離した保護シートSを案内する複数のプーリ29a〜29dと、中央のプーリ29b,29cの間に設けられて自重により保護シートSのテンションを適正化するダンサローラ30とが設けられ、これらに案内された保護シートSは、巻取リール10によりTABが巻き取られる際に同時に巻き取られ、巻取リール14においてはTABと保護シートSとが重ねられた状態で巻き取られるようになっている。
【0040】
さらに、前記顕微鏡24とパンチ装置25との間に備えられたスプロケットホイール12dは、該ホイール12dの回転量の情報に基いて、TABの移送距離及び移送速度の情報を取得するエンコーダ12d′に連絡されている一方、第1〜第3駆動ローラ13a〜13cのうちの上流側の第1駆動ローラ13aは、エンコーダ12d′で取得した速度情報に基いて回転数のフィードバック制御を行うようになっている。
【0041】
また、第1駆動ローラ13aの下流側の第2、第3駆動ローラ13b,13cは、TABのテンションを最適化する回転数に設定されている。そして、第1〜第3駆動ローラ13a〜13cの上方には、TABを上方から押圧する押付けローラ13a′〜13c′が備えられている。なお、押付けローラ13a′〜13c′は、TABのパーフォレーションP…Pが設けられた幅方向両端部を押圧するようになっており、TABのテンションを適正化するために作用する。
【0042】
一方、図3に示すように、この検査装置1には、互いに信号の授受を行う搬送用コントローラ100と画像用コントローラ110とが備えられている。搬送用コントローラ100は、前記エンコーダ12d′、光電センサ19、及び作業者がデータ等を入力するキーボード101、タッチパネル102等からの信号を入力し、第1〜第3駆動ローラ13a〜13c、及びパンチ装置25などに制御信号を出力するようになっている。また、前記画像用コントローラ110は、前記エンコーダ12d′、第1、第2ラインセンサ20,21等からの信号を入力し、第1、第2検査用モニタ27,28などに制御信号を出力するようになっている。
【0043】
前記第1投光機22は、移送中のTABの斜め上方から光の照射を行うように配置され、第1ラインセンサ20は、該第1投光機22の照明による反射光を連続的に検出するようになっている。また、前記第2投光機23は、移送中のTABの下方から光の照射を行うように配置され、第2ラインセンサ21は、該第2投光機23の照明による透過光を連続的に検出するようになっている。そして、前記画像用コントローラ110は、第1ラインセンサ20から取得したTABの幅方向の直線画像を組み合わせて1デバイスの画像を作成し、第2ラインセンサ21で取得した画像も同様にして1デバイスの画像を作成する。さらに、前記画像用コントローラ110に内蔵されたメモリ100aには、デバイスXの基準画像が格納されており、この基準画像と第1、第2ラインセンサ20,21により取得したデバイスXの画像で作成されたそれぞれの画像とを対比することにより、各デバイスXの欠陥の存在(以下、「NG」という)又は欠陥の非存在(以下、「OK」という)が判定される。
【0044】
一方、判定結果は、搬送用コントローラ100に入力され、これに応じてTABの移送制御が行われる。第1、第2ラインセンサ20,21で取得した画像により作成したデバイスXの画像が、共にOK判定されたときは、当該デバイスXについての検査は終了されて後続のデバイスXの検査が開始されるが、いずれか一方又は両方がNG判定されたデバイスXは、前記顕微鏡24により目視できる位置(以下、「顕微鏡位置」という)又は前記パンチ装置25によりパンチ穴が形成されるべき位置(以下、「パンチ位置」という)に移送され、後続のデバイスXについての検査が一旦中断される。
【0045】
検査開始時には、前記光電センサ19はフィルムテープTに設けられた先頭のデバイスXの下流側のエッジを検出する。そして、このデバイスXが光電センサ19により検知された位置から所定距離上流側の基準位置に移送され、TABの初期位置の設定が完了する。また、作業者は、予めTABのピッチ等の情報を前記キーボード101により入力し、これらの情報に基いて、各デバイスXを移送すべき、基準位置から前記第1、第2ラインセンサ20,21までの距離、基準位置から顕微鏡位置までの距離、基準位置からパンチ位置までの距離等が計算される。そして、前記エンコーダ12d′による移送距離の情報に基いて、第1、第2ラインセンサ20,21による画像取得開始のタイミングと画像取得終了のタイミングとが計算される。
【0046】
ところで、NG判定されたデバイスXの扱いについて、パンチモードと顕微鏡モードとがあり、作業者が予めタッチパネル102を操作することにより選択できるようになっている。
【0047】
まず、作業者によりパンチモードが選択されたときの制御について図4のフローチャートに基いて説明する。
【0048】
まず、ステップS1でNをゼロに初期化する。次に、ステップS2で、TABが所定速度で連続的に移送される。そして、ステップS3で、画像取得のタイミングか否かを判定し、画像取得のタイミングになればステップS4に進み、第1ラインセンサ20により取得した直線画像に基いて1デバイスの画像を作成し、第2ラインセンサ21により取得した直線画像に基いて同様に1デバイスの画像を作成する。
【0049】
次に、ステップS5で、N≠0か否かを判定し、N=0のときは、ステップS6に進み、当該デバイスXについての欠陥の有無の判定を行う。このとき、前記ステップS4で作成された2つの画像と基準画像とを対比することによりデバイスXの欠陥の有無が判定される。そして、前記ステップS6でOK判定がされた場合は、ステップS2に戻って後続のデバイスXについて同様に判定が行われる。また、ステップS6でNG判定がされた場合は、ステップS7に進み、NにN+1を代入し、ステップS2に戻る。
【0050】
一方、ステップS5でN≠0のときは、ステップS8に進み、当該デバイスXについての欠陥の有無の判定を行う。ステップS8でOK判定のときは、後述するパンチ制御を実行し、NG判定のときは、ステップS9に進み、NにN+1を代入し、ステップS10に進む。ステップS10では、N=5か否かが判定され、N=1〜4のとき、つまり1〜4回連続してNG判定されているときはステップS2に戻る。ステップS10で、N=5のとき、つまり5回連続してNG判定されているときはステップS11に進み、アラームを報知すると共に装置を停止させ、制御を終了する。
【0051】
そして、ステップS12〜S15で行われる前記パンチ制御では、まず、ステップS12でTABの送りを一時停止させ、次にステップS13で、NG判定されたデバイスXをパンチ位置に高速で移送する。なお、複数のNG判定されたデバイスXが検出されているときは、最下流のデバイスXをパンチ位置に高速で移送し、停止させる。そして、ステップS14で、停止したデバイスXにパンチ装置25によりパンチ穴を形成する。なお、複数のNG判定されたデバイスXが検出されているときは、最下流のデバイスXのパンチ作業が終了すると、該デバイスXの上流側のデバイスXがパンチ位置に位置するようにTABが所定距離移送され、この上流側のデバイスXにパンチ穴が形成される。そして、このようにして全てのNG判定されたデバイスX…Xについてのパンチ作業が終了すると、ステップS15で、これらのデバイスXの上流側のOK判定されたデバイスXが基準位置に戻るように、TABが移送され、続いて、ステップS1に戻り、Nを初期化した上で、検査を再開するようになっている。
【0052】
次に、本制御を図5、6に示す動作図に基いて説明する。
【0053】
図5(a)に示すように、デバイスX1が、第1、第2ラインセンサ20,21を通過し、NG判定されている。そして、図5(b)に示すように、該デバイスX1の後続のデバイスX2がOK判定されている。この場合、図5(c)に示すように、前記デバイスX1がパンチ位置に高速で移送される。そして、パンチ装置25により当該デバイスX1にパンチ穴pが形成され、図5(d)に示すように、前記デバイスX2が基準位置に戻され、検査が再開される。なお、図5中、未判定のデバイスXには斜線を施している。
【0054】
また、図6(a)に示すように、デバイスX1が、第1、第2ラインセンサ20,21を通過し、NG判定されている。そして、図6(b)に示すように、該デバイスX1の後続のデバイスX2もNG判定されており、図6(c)に示すように、該デバイスX2の後続のデバイスX3がOK判定されている。この場合、図6(d)に示すように、前記デバイスX1がパンチ位置まで移送され、パンチ装置25により当該デバイスX1にパンチ穴pが形成される。そして、図6(e)に示すように、TABを少し移送することにより前記デバイスX2がパンチ位置まで移送され、パンチ装置25により当該デバイスX2にパンチ穴pが形成される。次に、図6(f)に示すように、前記デバイスX3が基準位置に戻され、検査が再開される。
【0055】
以上のように、本制御によれば、NG判定されたデバイスXがパンチ位置まで移送され、該デバイスXにパンチ穴pが形成された後、未判定のデバイスXが第1、第2ラインセンサ20,21の上流側に戻るように制御され、検査が再開されるので、パンチ装置25のパンチ動作によるTABの移送の減速、停止に拘らず、自動的に適正な検査を行うことができる。
【0056】
また、NG判定される度にパンチ位置まで移送し、パンチ穴を開けるので、判定結果のデータの蓄積が回避され、データ処理系の負担を低減することができる。さらに、NG判定がされる度にデバイスXをパンチ位置まで移送し、戻す動作を行うと、連続してNG判定がされたときにTABが頻繁に往復移動することになって作業能率の低下が懸念されるが、前述のように、NG判定の後に、OK判定がなされたときに、NG判定されたデバイスXをパンチ位置に移送する作業が行われ、連続するNG判定されたデバイスX…Xについてはまとめてパンチ作業が行われるので、作業能率の低下が回避される。
【0057】
さらに、検査中に、例えば第1、第2ラインセンサ20,21のレンズ部分にごみが付着した場合や、装置の故障等の問題が生じた場合に、OKであるにも拘らずNG判定が連続してなされることになる。しかしながら、前述のように、5回以上NG判定が連続したときに、自動的に装置を停止させるように制御されるので、前述のような問題が発生している場合に、検査が無駄に継続することが防止される。
【0058】
ところで、本発明の他の実施の形態として、NG判定されたときでも検査を継続させ、NG判定されたデバイスXがパンチ位置に到達したときに、TABの位相を停止させてパンチ穴を形成するように制御するものがある。
【0059】
即ち、図7(a)に示すように、デバイスX1についてNG判定がなされた後、図7(b)に示すように、デバイスX2〜X5についてOK判定が連続し、NG判定されたデバイスX1がパンチ位置に到達したときに、TABの移送は停止され、当該デバイスX1はパンチ装置25によりパンチ穴pが形成される。このとき、第1、第2ラインセンサ20,21により画像取得中のデバイスXa、Xbが存在し、このまま検査を再開した場合、当該デバイスXa、Xbについて適正な画像が取得できず、検査精度が確保できないことになる。そこで、図7(c)に示すように、当該デバイスXa,Xbが基準位置に戻るようにTABを移送し、この後、検査を再開するように制御される。なお、前記デバイスXaについては、第1ラインセンサ20には正常な画像が取得されているので、パンチ動作の後に、デバイスXbが基準位置に戻るように制御し、デバイスXbについては第2ラインセンサ21のみの画像を再取得するようにして検査を再開するようにしてもよい。
【0060】
このような制御においても、パンチ装置25によるパンチ動作の際のTABの移送の減速、停止に拘らず、自動的に各デバイスXについての適正な検査が行われることになる。
【0061】
一方、作業者により顕微鏡モードが選択されたときの動作について図8のフローチャートに基いて説明する。なお、このフローチャートのステップS21〜S32は、図4のパンチモードにおけるステップS1〜S12と同様であるので、説明を省略する。
【0062】
即ち、ステップS32でTABの送りを一時停止した後、ステップS33でNGデバイスを顕微鏡位置に高速で移送し、停止させる。次に、ステップS34に進み、NG制御を実行する。
【0063】
図9に示すように、NG制御においては、まずステップS41で、作業者がNGデバイスXを目視により確認し、当該デバイスXについてのOK又はNGを判定し、タッチパネル102により判定結果を入力する。そして、ステップS42で、判定がN回終了したか否か、即ちNGデバイスX…Xの全てについて判定が終了したか否かを判定し、N回終了していないときはステップS41に戻る。なお、複数のNGデバイスX…Xが存在するときは、まず、最下流のNGデバイスXについて判定が行われ、判定結果をタッチパネル102により入力すると、該デバイスXの上流隣のデバイスXが顕微鏡位置に移送され、作業者は同様に判定し、判定結果を入力するようになっている。このようにして、全てのNGデバイスX…Xについて作業者の目視による判定が行われる。
【0064】
そして、ステップS42でN回の判定が終了したときは、ステップS43に進み、これらのNGデバイスX…Xについての処理方法を選択する。このとき、タッチパネル102には、NGデバイスXをパンチして次のデバイスXから検査再開(以下、「NG処理」という)、NGデバイスXより再検査(以下、「再検査処理」という)、NGデバイスXをパンチせず次のOKデバイスXから検査再開(以下、「OK処理」という)の3通りの処理の選択画面が表示される。
【0065】
ステップS43で、NG処理が選択されたときは、ステップS44で、NGデバイスXがパンチ位置に高速で移送、停止される。そして、ステップS45でパンチ装置25によりNGデバイスXにパンチ穴が形成される。なお、複数のNGデバイスX…Xが判定されているときは、前記パンチモード時と同様に、下流側のデバイスXから順次パンチ穴を形成するように制御される。次に、ステップS46で、OKデバイスXを基準位置に高速で移送、停止させ、NG制御を終了し、ステップS21に戻る。
【0066】
また、ステップS43で、再検査処理が選択されたときは、ステップS47で、NGデバイスXを基準位置に高速で移送、停止させ、NG制御を終了し、ステップS21に戻る。
【0067】
さらに、ステップS43でOK処理が選択されたときは、ステップS48で、OKデバイスXを基準位置に高速で移送、停止させ、NG制御を終了し、ステップS21に戻る。
【0068】
次に、この顕微鏡モードのNG制御について図10〜12の動作図を用いて説明する。
【0069】
まず、図10(a)に示すように、デバイスX1についてNG判定がなされ、図10(b)に示すように、デバイスX1の次のデバイスX2についてOK判定がなされている。この場合、TABの移送を一時停止した後、図10(c)に示すように、前記デバイスX1を顕微鏡位置に高速で移送し、停止させる。
【0070】
そして、顕微鏡での目視判定の結果、当該デバイスX1をNGとして扱うときに、作業者がタッチパネル102で「NG処理」を選択する。このとき、図10(d)に示すように、デバイスX1がパンチ位置まで高速で移送、停止され、デバイスX1にはパンチ穴pが形成され、図10(e)に示すように、デバイスX2が基準位置に戻るように制御され、該デバイスX2から検査が再開される。
【0071】
また、図11(a)〜図11(c)は、前記図10(a)〜図10(c)と同様であって、顕微鏡での目視判定の結果、判定が微妙なときなど、もう一度検査し直したいときに、作業者がタッチパネル102で「再検査処理」を選択する。このとき、図11(d)に示すように、デバイスX1が基準位置に戻るように制御され、該デバイスX1から検査が再開される。
【0072】
また、図12(a)〜図12(c)は、前記図10(a)〜図10(c)と同様であって、顕微鏡での目視判定の結果、作業者が当該デバイスX1について、明らかに欠陥の存在が認められずに、OKであると判定したときに、作業者がタッチパネル102で「OK処理」を選択する。このとき、デバイスX1についてはOK判定されたものとみなされ、図12(d)に示すように、デバイスX2が基準位置に戻るように制御され、該デバイスX2から検査が再開される。
【0073】
以上のように、顕微鏡モードでは、画像用コントローラ110による画像判定と、顕微鏡24を用いた作業者の目視による判定との2段階の判定が行われるので、検査精度が向上する。さらに、作業者はタッチパネル102を適宜操作するだけで、自動的に前述の各処理が行われることになって、装置の操作性が向上する。
【産業上の利用可能性】
【0074】
本発明は、TABの欠陥等の検査を行う検査装置に関し、製造産業に広く好適である。
【図面の簡単な説明】
【0075】
【図1】本発明の実施の形態に係る検査装置の正面図である。
【図2】TABの説明図である。
【図3】検査装置のシステム図である。
【図4】パンチモードの制御を示すフローチャートである。
【図5】同じく動作図である。
【図6】同じく動作図である。
【図7】パンチモードの他の制御例に係る動作図である。
【図8】顕微鏡モードの制御を示すフローチャートである。
【図9】同じくフローチャートである。
【図10】同じく動作図である。
【図11】同じく動作図である。
【図12】同じく動作図である。
【図13】従来の問題点の説明図である。
【符号の説明】
【0076】
1 検査装置
10 巻出リール
13a〜13c 駆動ローラ
20 第1ラインセンサ
21 第2ラインセンサ
25 パンチ装置
100 搬送用コントローラ
102 タッチパネル
110 画像用コントローラ
X デバイス
【特許請求の範囲】
【請求項1】
多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、
前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、
TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスがパンチ手段の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、かつ、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段が備えられていることを特徴とするTABの検査装置。
【請求項2】
前記請求項1に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、欠陥の存在が判定されたデバイスに対するパンチ穴の形成後、移送再開時に、ラインセンサ上にデバイスが位置するときは、そのデバイスが該センサの上流側まで戻るように、移送手段を制御することを特徴とするTABの検査装置。
【請求項3】
前記請求項1に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とするTABの検査装置。
【請求項4】
前記請求項1に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、前記欠陥の非存在が判定されたデバイス又は次のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とするTABの検査装置。
【請求項5】
多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、
前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、
前記画像取得手段とパンチ手段との間に配置され、前記判定手段によって欠陥の存在が判定されたデバイスを目視により欠陥の有無を判断するための顕微鏡と、
該顕微鏡による判断結果に応じてパンチ処理又は非パンチ処理を選択する処理選択手段と、
TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスが顕微鏡の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、
前記処理選択手段によりパンチ処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスをパンチ手段の対応位置に移送するように移送手段を作動させると共に、この後、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御し、かつ、
前記処理選択手段により非パンチ処理が選択されたときは、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段とが備えられていることを特徴とするTABの検査装置。
【請求項6】
前記請求項5に記載のTABの検査装置において、
前記処理選択手段は、再検査処理を選択可能とされ、
前記移送制御手段は、該処理選択手段により再検査処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御することを特徴とするTABの検査装置。
【請求項7】
前記請求項5または請求項6に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、当該デバイスが顕微鏡に対応位置するときに移送手段を停止させることを特徴とするTABの検査装置。
【請求項8】
前記請求項5または請求項6に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とするTABの検査装置。
【請求項9】
前記請求項5または請求項6に記載のTABの検査装置において、
前記移送手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とするTABの検査装置。
【請求項10】
前記請求項4または請求項9に記載のTABの検査装置において、
前記判定手段によって所定回数以上連続して欠陥の存在が判定されたときに、装置を停止させる装置停止手段が備えられていることを特徴とするTABの検査装置。
【請求項1】
多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、
前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、
TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスがパンチ手段の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、かつ、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段が備えられていることを特徴とするTABの検査装置。
【請求項2】
前記請求項1に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、欠陥の存在が判定されたデバイスに対するパンチ穴の形成後、移送再開時に、ラインセンサ上にデバイスが位置するときは、そのデバイスが該センサの上流側まで戻るように、移送手段を制御することを特徴とするTABの検査装置。
【請求項3】
前記請求項1に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とするTABの検査装置。
【請求項4】
前記請求項1に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスがパンチ手段に対応位置するように移送手段を作動させると共に、移送再開時に、前記欠陥の非存在が判定されたデバイス又は次のデバイスがラインセンサの上流側まで戻るように、移送手段を制御することを特徴とするTABの検査装置。
【請求項5】
多数のデバイスを一定ピッチで設けてなる帯状のTABをリールから繰り出して移送する移送手段と、該移送手段で移送されているTABの各デバイスを画像として取得する画像取得手段と、該取得手段で取得した画像を処理し、予め登録された基準画像と対比することによってデバイスの欠陥の有無を判定する判定手段と、前記画像取得手段よりTABの移送方向下流側に配置され、前記判定手段によって欠陥の存在が判定されたデバイスにパンチ穴を形成するパンチ手段とを有するTABの検査装置であって、
前記画像取得手段は、TABの幅方向に配置されたラインセンサを用いて、TABが移送している状態で幅方向の直線画像を連続的に取得することによりデバイス全体の画像を取得するように構成されており、かつ、
前記画像取得手段とパンチ手段との間に配置され、前記判定手段によって欠陥の存在が判定されたデバイスを目視により欠陥の有無を判断するための顕微鏡と、
該顕微鏡による判断結果に応じてパンチ処理又は非パンチ処理を選択する処理選択手段と、
TABを連続移送するように前記移送手段を制御すると共に、前記判定手段によって欠陥の存在が判定されたデバイスが顕微鏡の対応位置に移送されたときに該移送手段によるTABの移送を停止させ、
前記処理選択手段によりパンチ処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスをパンチ手段の対応位置に移送するように移送手段を作動させると共に、この後、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御し、かつ、
前記処理選択手段により非パンチ処理が選択されたときは、移送再開時に、後続の未判定のデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御する移送制御手段とが備えられていることを特徴とするTABの検査装置。
【請求項6】
前記請求項5に記載のTABの検査装置において、
前記処理選択手段は、再検査処理を選択可能とされ、
前記移送制御手段は、該処理選択手段により再検査処理が選択されたときは、移送再開時に、前記欠陥の存在が判定されたデバイスがラインセンサの上流側まで戻るように、前記移送手段を制御することを特徴とするTABの検査装置。
【請求項7】
前記請求項5または請求項6に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、移送手段を停止させることなく作動させて、後続のデバイスに対する判定を継続して行わせると共に、当該デバイスが顕微鏡に対応位置するときに移送手段を停止させることを特徴とするTABの検査装置。
【請求項8】
前記請求項5または請求項6に記載のTABの検査装置において、
前記移送制御手段は、前記判定手段によってデバイスの欠陥の存在が判定されたときに、後続のデバイスに対する判定を中断させて、当該デバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とするTABの検査装置。
【請求項9】
前記請求項5または請求項6に記載のTABの検査装置において、
前記移送手段は、前記判定手段によってデバイスの欠陥の存在が判定された後、欠陥の非存在が判定されたときに、後続のデバイスに対する判定を中断させて、欠陥の存在が判定されたデバイスが顕微鏡に対応位置するように移送手段を作動させることを特徴とするTABの検査装置。
【請求項10】
前記請求項4または請求項9に記載のTABの検査装置において、
前記判定手段によって所定回数以上連続して欠陥の存在が判定されたときに、装置を停止させる装置停止手段が備えられていることを特徴とするTABの検査装置。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−19060(P2007−19060A)
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願番号】特願2005−195824(P2005−195824)
【出願日】平成17年7月5日(2005.7.5)
【出願人】(000110642)ナビタス株式会社 (15)
【Fターム(参考)】
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願日】平成17年7月5日(2005.7.5)
【出願人】(000110642)ナビタス株式会社 (15)
【Fターム(参考)】
[ Back to top ]