
TDOA分散アンテナを使用したターゲットの位置特定方法及び装置
本発明は、分散アンテナを使用してターゲット(5)の位置を特定するための装置と方法である。アンテナは、既知の位置に設けられた複数の受信要素(4,6,6)からなる。受信要素の少なくとも1つは送信器(4)でもあり、呼掛け信号(7)をターゲット(5)に送信する。ターゲット(5)からの返信信号(8)は複数の受信要素(4,6,6)によって受信され、ターゲットの位置を、返信信号(8)の到達時間及び呼掛け信号(7)の送信と返信信号(8)の受信との間の往復遅延を使用して計算する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地上用または離陸後の航空管制装置に関し、より詳細には、到着時間差(Time Differential of Arrival:TDOA)分散アンテナを使用する方向探知とターゲットの位置特定に関する。
【背景技術】
【0002】
空港、ターミナル、航空路(en route)用の装置を含む航空管制装置の範囲内または周辺の地上車両や航空機(ターゲット)の位置を特定するための様々な装置と方法が存在する。
【0003】
大きな空港の多くでは、進入レーダー装置を利用して空港外のターゲットの位置特定と追跡を行っている。これらのレーダー装置は、大開口アンテナから得られる細いビームを使用することによって優れた方位角精度を得ており、距離(range)は、レーダーからターゲットに達し、ターゲットからレーダーに戻ってくる信号の往復遅延(round trip delay)から計算する。このような進入レーダー装置は、大きな回転アンテナが通常は必要となるために高価である。また、これらのレーダー装置の更新速度は約4.5秒であり、関連する分析装置の応答速度はレーダーの更新速度によって制限される。
【0004】
ターゲットの位置を特定するための別の方法は多点計測(multilateration)である。通常、多点計測装置は複数のビーコン送信器と受信器を配置することによって構成される。多点計測は、航空機のトランスポンダの送信信号からの情報を使用してターゲットの正確な位置を特定する到着時間差(TDOA)技術である。多点計測のアルゴリズムは、TDOA情報を使用して二次元または三次元座標系におけるターゲットのほぼ正確な位置を推定する。次に、ターゲットの推定位置に対して最適化プロセスを行ってターゲットのより正確な位置を得る。
【0005】
多点計測装置は、滑走路への侵入のために空港における地上のターゲットの位置特定と追跡に使用することができると共に、空港に比較的近い領域での進入する航空機の位置特定と追跡や航空路航空管制装置にも使用することができる。しかし、多点計測装置の周囲の広い領域をカバーする必要がある場合には、ターゲットの距離に対するアンテナ基線(baseline)(受信器間の距離)の比率は、幾何学的測定精度(Geometric Dilution of Precision(GDOP))が非常に大きくなるような値となる。従って、「不確定の楕円(ellipse of uncertainty)」内でターゲットの位置を特定することはより困難になり、多点計測装置からターゲットまでの距離が増加するに従って多点計測装置の有効性は顕著に低下する。
【0006】
従来の多点計測技術における上述した問題を克服する方法としては、多点計測装置の境界の外に外部アンテナ素子を設置してアンテナ基線を増加させることが挙げられる。しかし、この方法では、土地の追加購入、装置の外部のセキュリティ、外部アンテナ素子のメンテナンス、外部アンテナ構成要素と装置の通信、その他のロジスティックな問題に関して困難が生じる。
【0007】
航空管制装置の多くは上述した方法の1つまたはそれらの組み合わせを使用しているが、進入する航空機または滑走路に侵入する地上の車両の位置を特定するための信頼できる方法を有していない空港もある。それらの空港の中には、近隣の設備の整った大きな空港からレーダーデータを得て空港内の航空交通情報を得ている場合もある。この方法は、その他の方法ではこのような情報を得ることができない空港には有益だが、対象となるターゲットが見通し線(line of sight)の問題によってデータを提供する空港のレーダーから不明瞭になってしまう可能性もある。
【0008】
従って、飛行中のターゲットの位置を特定し、空港に進入するターゲットの位置を特定し、滑走路侵入装置の構成要素として地上のターゲットの位置を特定し、進入装置と滑走路侵入装置との間の切り替えを改善し、装置の境界外にアンテナ素子を設置することなく既存の航空管制装置を利用してターゲットの位置特定の範囲と精度を高めることができる航空管制装置を提供するための信頼性が高く比較的安価な解決手段が求められている。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明の目的は、既存の航空管制装置を利用すると共に、大開口アンテナ、機械回転アンテナまたは装置の境界外に設置される追加の受信器を必要とすることなく、高い方向・位置特定精度を達成するための装置と方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明は、複数のターゲット位置特定方法を実施するために使用することができる装置に関する。装置は、ターゲットに信号を送信するための少なくとも1つの送信器と、ターゲットからの返信信号を受信するための少なくとも1つの受信器とを含み、信号の往復遅延(Round Trip Delay:RTD)を計算する。装置は、ターゲットからの返信信号を受信するための少なくとも3つの受信器と、各受信器における信号の到達時間(TOA)を決定するための装置と、をさらに含む。また、装置は、詳細を後述するように、本発明の方法に従って到達時間差(TDOA)を計算し、位置特定計算を行う中央処理装置(central processor)も含む。
【0011】
本発明の方法は、ターゲットのトランスポンダ信号から得られるTDOAとRTDとのデータを使用して少なくともターゲットの推定位置を計算する。TDOAは、複数の受信器が信号を受信する場合に、ターゲットからのトランスポンダ信号のTOAを測定することによって計算される。RTDを計算するために利用される受信器は、TDOAを計算するために使用される3つの受信器の1つとしても機能することができる。各TOAは指定された受信器のTOAから減算され、TDOAが得られる。送信器からターゲットに呼掛け信号を送信し、呼掛け信号の送信時間とターゲットから受信器までの返信信号の到達時間との間の遅延時間を測定することによって、RTDを決定する。RTDデータは、次にターゲットの正確な距離を計算するために使用することができる。RTDデータから得られる距離と共にTDOAデータを使用することによって、従来の多点計測技術に関連する距離GDOPの問題が克服され、距離精度、従って全体的な位置精度が飛躍的に向上する。
【0012】
本発明の一実施形態に係る方法では、効果的にアンテナアレイを形成する少なくとも3つのアンテナ素子(受信装置、「RU」)によって受信されたトランスポンダ応答のTDOAデータに基づいてターゲットの方位角を計算する。ターゲットの距離が基線よりも非常に大きい場合には、方位角と仰角を計算する簡単な線形近似を使用することができる。距離のみまたは距離と高度が利用できる場合には、所与の距離と測定TDOAに最も適合する高度での方位角検索を行うことによって測定精度を大きく向上させることができる。
【0013】
地上のRUによって受信される信号は、通常はターゲットである航空機のトランスポンダによって生成される。データが地上の送信器からの呼掛け信号に対する応答として受信された場合、メッセージの往復遅延を計算し、距離計算に使用するために保存する。
【0014】
受信データはRUによって処理され、到着時間差(TDOA)の計算に使用される到着時間(TOA)情報が付加され、さらなる評価のために処理装置に送られる。処理装置は、各クラスタが所定のターゲットからの所定の送信情報(transmission)を表すクラスタにデータを分類し、評価して方位角の初期推定値を得る。次に、初期方位角の周辺で検索を行って非線型誤差を補償する。検索は、RTDデータから計算した距離とトランスポンダ応答内の高度データから計算した高度における初期方位角について円弧を作成することによって行われる。円弧の大きさは、アンテナ基線の大きさの約2倍に設定される。円弧に沿った所定数の点を評価のために選択し、各選択点はトランスポンダ返信信号から計算した同一のRTDを有する。
【0015】
円弧上の各選択点について予測TDOAを計算し、予測TDOAを測定TDOAと比較すると誤差が得られる。最小誤差を有する予測TDOAに関連付けられた方位角を、ターゲットのより正確な方位角として選択する。次に、得られたより正確な方位角とRTDデータを使用してターゲットのより正確な平面位置を計算する。
【0016】
検索はより小さな円弧を使用して所定回数繰り返され、推定位置の精度を向上させる。距離が利用できない場合には、この方法では推定方位角と仰角のみを計算する。検索から最小誤差となる方位角を選択する。最後に、x,y位置を計算し、高度データから計算される場合には高度(z)を含める。
【0017】
本発明の別の実施形態に係る方法は、上述したようにトランスポンダ信号が少なくとも3つの受信器によって受信された場合のTOA及びRTD情報を使用してターゲットの二次元推定位置を計算する。本実施形態によれば、ターゲットの高度は既知であり、z座標として使用してターゲットの推定位置の精度を向上させる。高度は、トランスポンダ信号に含まれるターゲットから供給された高度データを使用して計算でき、あるいはターゲットが地上にあるという判断から高度を得ることができる。本実施形態によれば、測定TOA、ターゲットの高度、計算距離をRUの座標とともにクローズド距離支援アルゴリズムに供給する。本発明のこの方法では、ターゲットの二次元(x,y)推定位置を計算し、高度をz座標として使用して三次元推定位置を得る。
【0018】
次に、推定位置、ターゲットの高度、計算距離を検索に使用し、推定位置の精度をさらに向上させる。検索はターゲットの新しい推定位置を推定し、新しい推定位置に対応するTOAを計算する。検索は、元(現在)の推定位置のTOAと新しい推定位置のTOAとの間の誤差を計測するコスト関数をさらに含む。最小誤差をもたらす推定位置を新しい現在の推定位置として選択する。検索は、誤差が所定の最小値以下となるまで、最小誤差となる推定位置を新しい現在の推定位置として使用して繰り返される。
【0019】
本発明のさらに別の実施形態に係る方法は、上述したようにトランスポンダ信号が少なくとも4つの受信器によって受信された場合のTOA及びRTD情報を使用してターゲットの三次元推定位置を計算する。本実施形態によれば、ターゲットの高度は未知である。従って、測定TOAと計算距離のみをRUの座標とともにクローズド距離支援アルゴリズムに供給する。この方法では、TOA及びRTDデータから直接ターゲットの三次元(x,y,z)推定位置を計算する。
【0020】
次に、三次元推定位置と計算距離を使用して検索を行い、推定位置の精度をさらに向上させる。検索ではターゲットの新しい推定位置を推定し、新しい推定位置に対応するTOAを計算する。検索は、元(現在)の推定位置のTOAと新しい推定位置のTOAとの間の誤差を計測するコスト関数をさらに含む。最小誤差となる推定位置を新しい現在の推定位置として選択する。検索は、誤差が所定の最小値以下となるまで、最小誤差となる推定位置を新しい現在推定位置として使用して繰り返される。
【0021】
本発明の特徴及び目的のさらなる理解のために、添付図面を参照して本発明を実施するための好適な形態を以下に詳細に説明する。
【発明を実施するための最良の形態】
【0022】
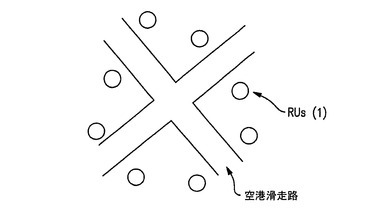
以下、本発明の一実施形態を図1〜図9を参照して説明する。図1に示すように、複数のアンテナ素子1(以下「受信装置」(RU)という)が空港領域内の既知の位置に配置され、アンテナアレイを構成している。代表的なRUはセンシス社(Sensis Corporation)(型番100−008121−G001)から販売されている。RUの距離と配置は、アンテナアレイ基線(baseline)または基線と呼ぶ。本実施形態では、少なくとも1つの送信器と3つの受信器の組み合わせが空港内と空港周辺でのターゲットの三次元的な位置特定のために必要である。RUは、送信専用RU、受信専用RUまたは送受信RUであってもよい。空港内と空港周辺の地形と建物のレイアウトによっては、見通し線(Line of Sight;LOS)と多重通路の問題を解消するためにさらに多くのRUが必要な場合がある。本発明によれば、空港の領域内に全てのRUを配置することができ、メンテナンスとセキュリティが容易になると共に通信が簡素化される。好ましい実施形態では、送信アンテナ素子は1030MHzの位相変調アップリンク信号を送信することができ、受信アンテナ素子は1090MHzの振幅変調ダウンリンク信号を受信することができる。ただし、その他の信号も使用することができる。
【0023】
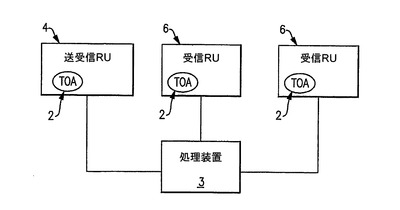
図2に示すように、各RU1は、ターゲットから受信した各トランスポンダ信号の到達時間(TOA)を正確に測定するTOA装置2を含む。RU1は、ローカルエリアネットワーク(LAN)等の通信手段によって、位置特定計算を行う処理装置3に接続されている。また、Rf(無線周波数)リンクや電話技術等の他の通信手段も使用することができ、本発明は通信手段によって限定されるものではない。
【0024】
ある意味では、図1に示すRUのレイアウトと図2に示す装置は、従来の多点計測技術を使用してターゲットの位置を特定するために採用されるものと同様である。しかし、上述したように、ターゲットの距離に関連付けられるGDOPは、ターゲットの距離に対するアンテナ基線(受信器間の距離)の比率が減少するに従ってかなり大きくなる。従って、「不確定の楕円」内でターゲットの位置を特定することはより困難になり、多点計測装置からターゲットまでの距離が増加するに従って多点計測装置の有効性は顕著に低下する。一方、本発明によれば、図1と図2に示すようなRUインフラの有効範囲を拡張するために距離支援位置アルゴリズム(range aided position algorithm)を使用し、以下に詳細に説明するように、装置から非常に離れたターゲットの位置を正確に特定する。
【0025】
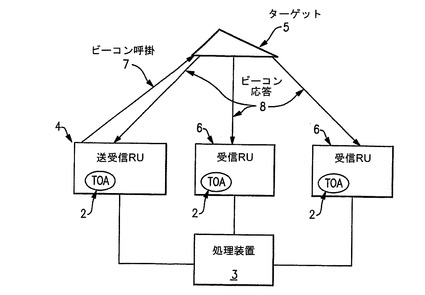
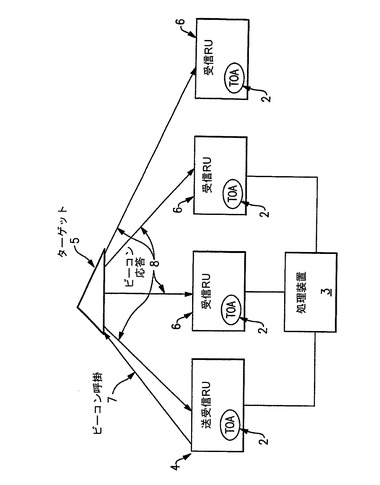
図3は、送受信RU4と、ターゲット5と、2つの受信RU6との間の信号の流れを示す。送受信RU4は呼掛け信号7を送り、ターゲット5のトランスポンダからの応答8を要求する。送受信RU4は、ターゲットの距離を計算する際に使用するために呼掛け信号7の送信時間を記録する。ターゲット内のトランスポンダは、後述するように許容範囲の既知の時間(内部遅延)内で自動的に応答する。返信信号はRU4,6,6によって受信され、データが解読され、TOA装置2からの到達時間(TOA)が追加される。グローバルポジショニング装置(GPS)データ、局所的時計、内部カウンタなどの様々な方法を、TOAを決定するために使用することができるが、本発明はそれらに限定されるものではない。トランスポンダの返信信号は、航空交通管制官が使用するための豊富な情報を含んでいる。このような情報としては、要求された応答の種類に応じてモードSアドレス、飛行識別番号、高度データが挙げられるが、本発明はそれらに限定されるものではない。次に、各RUは、更なる評価のためにタイムスタンプを含むデータを、データリンクを介して処理装置3に送信する。また、送受信RU4は呼掛け信号7の送信時間を、データリンクを介して処理装置3に送信する。
【0026】
処理装置は解読データをクラスタ化し、各クラスタは所定のターゲットから各RUが受信した所定の送信情報を含む。クラスタ化(clustering)は、ターゲット識別番号、モードSアドレスまたはモード3/Aコードによって通常は行うが、その他の証明された方法も利用することができる。以下に詳細に説明するように、処理装置はRUから供給されたターゲットデータと記録された呼掛け信号の送信時間を利用して計算を行い、ターゲットの正確な位置を決定する。
【0027】
送受信RU4からターゲットに呼掛け信号が送信された時間は、ターゲットのトランスポンダの内部遅延及び送受信RU4でのターゲットの返信信号の到達時間と共に既知である。このデータは、往復遅延を計算してターゲットの正確な距離を決定するために使用される。好ましい実施形態では、距離計算に使用される信号を送受信するために同一のアンテナを使用する。このようにして、往復遅延データのみに基づいてターゲットとなる航空機の正確な距離を下記式によって計算することができる。
【0028】
【数1】
【0029】
式中、Rは距離であり、RTDは往復遅延(呼掛け信号の送信から返信信号の受信までの経過時間)であり、delayはターゲットのトランスポンダの内部遅延であり、cは光速である。
【0030】
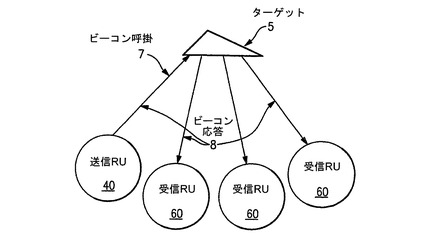
別の実施形態では、図4に示すように、送信RU40を3つの受信RU60と組み合わせて使用することができる(すなわち、信号の送受信は同一のアンテナを介して行われない)。本実施形態を採用する場合、ターゲットの方位角を計算した後でなければターゲットの正確な距離は分からない。すなわち、往復遅延は送信RU40のアンテナから受信RU60の1つのアンテナまでにおいて測定されるため、ターゲットの方位角が計算されるまではターゲットの正確な距離は分からない。ただし、図3と図4に示すシナリオでは、距離が往復遅延データから計算されるため、従来技術の多点計測技術に関連するGDOPの問題を解消することができ、RUインフラに変更を加えることなく距離精度が劇的に向上する(例えば、空港外の20マイルを超える距離)。
【0031】
なお、ターゲットの距離を計算するために往復遅延を単独(図3)またはターゲットの方位角と組み合わせて(図4)使用することは、方法の一工程に過ぎない。次の工程では、各ターゲットに対してクラスタ化TDOAデータを使用することが必要である。すなわち、同一のクラスタに属するトランスポンダ応答間のTDOAは、時間的バイアスを効果的に排除する基準としての1つのRUからのTOAを利用することで計算される。これらのTDOAを測定TDOAと呼ぶ。次に、線形近似を使用して測定TDOAをRUの既知の位置と関連して評価することによって方位角の第1の近似値を計算する。
【0032】
さらに、測定範囲及び高度における測定TDOAと最も一致する方位角の第1の近似値付近での方位角検索によってデータの精度をさらに向上させる。高度は、従来技術で知られているようにトランスポンダ応答に含まれる高度データから計算する。図5に示すように、トランスポンダ応答(返信信号)からの高度データから決定した高度と距離における方位角の第1の近似値について円弧9を生成する。本発明の好ましい実施形態(図3)では、検索を非常に簡素化するように、(往復遅延に基づく)距離計算に使用するために呼掛け信号を送信し、トランスポンダ返信信号を受信するために同一のアンテナが利用されているため、生成された円弧は円の一部を示す。呼掛け信号を送信し、トランスポンダ返信信号を受信するために異なるアンテナを利用した場合(図4)には、円弧は楕円の一部を示すことになる。この場合には検索アルゴリズムが多少複雑になるが、全くあるいはほとんど精度を低下させることなく検索を行うことができる。
【0033】
例えば、円弧はアンテナ基線(最も離れた2つのRU間の距離)の大きさの約2倍(実質的に2倍)となるように選択し、それぞれが返信信号から計算した場合に同じ往復遅延(RTD)を有する10個の点(方位角)10を円弧9に沿って設定する。検索時の各方位角点について、TDOAを後述する公知のモデルから計算する。これらのTDOAを予測TDOAと呼ぶ。次に、予測TDOAと測定TDOAとの最小誤差を計算する。図6に示すように、最小誤差11となる予測TDOAに関連付けられた方位角を選択する。好ましくは、円弧は新しい方位角を中心として原寸の10分の1まで縮小し、第2の群の新しい10個の点を小さな円弧上に設定する。このプロセスは、例えばアンテナ基線サイズ及びアンテナの距離精度を含む装置パラメータに基づいて所定回数繰り返す。繰り返し数は所与の装置に特有であり、装置の展開時に決定する。
【0034】
往復遅延データから正確な範囲を決定し、トランスポンダ応答によって得られる高度データから高度を計算しているため、検索は一次元で行われ、多点計測検索と比較して複雑さをかなり減少させることができる。最速降下法(Steepest Rate of Descent techniques)などの他の検索評価方法を使用しても同様の精度の結果を得ることができる。
【0035】
次に、最終的に計算した方位角と距離及びトランスポンダの返信信号の高度データから計算した高度からx,y,z座標を決定し、ターゲットの正確な三次元位置を特定する。このデータは、航空管制オペレータに対して表示することができる。
【0036】
図7は、本実施形態に係る工程のフロー図である。第1の工程は、好ましくは空港の領域内に複数のアンテナ素子を配置することである。好ましい実施形態では、アンテナ素子の少なくとも1つは信号を送受信し(送受信RU)、その他のアンテナ素子は受信専用RUであってもよい。
【0037】
送受信RUは信号をターゲットに送信し、ターゲットは既知のデータ(例えば、航空機ID、高度など)を含む返信信号を送信する。返信信号は、呼掛け信号を送信した送受信RUのアンテナまたは別のRUのアンテナを介して受信される。また、返信信号は少なくとも2つの他のRUにも受信される。受信データは解読されてTOA情報が付加され、次に処理装置3に送信され、クラスタ化されると共にターゲットの距離と初期(ほぼ正確な)方位角を計算するために利用される。
【0038】
図3に示す好ましい実施形態によれば、返信信号は呼掛け信号を送信したアンテナを介して受信され、ターゲットの正確な距離を得るために往復遅延を使用することができる。次に、測定TDOAを計算・評価してターゲットの初期方位角を決定し、初期方位角の周囲で検索を実行して非線型誤差を補償する。検索は、装置パラメータに基づいて所定回数繰り返される。次に、ターゲットの正確な三次元位置を決定する(ターゲットの高度はターゲットからの返信信号に含まれる高度データによって決定する)。
【0039】
本実施形態によれば、ターゲットの初期(ほぼ正確な)方位角を決定するために特定のアルゴリズムを使用する。初期方位角周辺で検索を実行し、ターゲットのより正確な方位角を得るためには別の特定のアルゴリズムを使用する。それらのアルゴリズムを開発した方法を以下に説明する。
【0040】
図8に、2つのRUによる返信信号受信の幾何学的表現を示す。測定TDOAのための正確な式は、コサイン定理を利用して以下のように導かれる。
【0041】
【数2】
【0042】
【数3】
【0043】
テイラー級数に展開すると、a≪r0について一次式が得られる。
【0044】
【数4】
【0045】
【数5】
【0046】
なお、r1−r0はターゲットと各RUとの距離の差を表す。変数uは、簡単な代数演算を使用して測定TDOAから直接計算することができる。
【0047】
【数6】
【0048】
(式中、uは角度phiのコサインであり、cは光速である。)
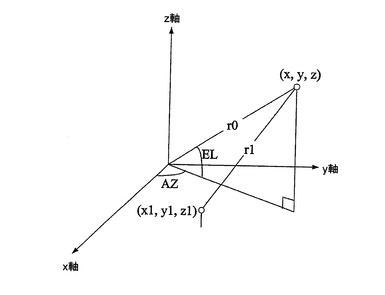
図9に示す座標系を使用することによって、この近似値は以下のように三次元に拡張される。
【0049】
【数7】
【0050】
式中、rlはターゲットからRUまでの正確な距離であり、(x,y,z)はターゲットの座標であり、(x1,y1,z1)は受信RUの座標である。
【0051】
原点からのターゲットの距離はr0と表される。
【0052】
【数8】
【0053】
r0≫(x1,y1,z1)の場合、適切なテイラー級数からの一次展開近似値は以下のように表される。
【0054】
【数9】
【0055】
【数10】
【0056】
(式中、azとelはそれぞれ方位角と仰角である。)
従って、距離の式は次のようになる。
【0057】
【数11】
【0058】
当業者には明らかなように、テイラー級数の一次部分のみを評価すると非線型誤差が引き起こされるが、許容できる方位角の一次近似値を得ることができる。これらの誤差の影響は、詳細を後述する検索によって緩和される。
【0059】
各受信器(RU)へのTOAは以下のように表される。
【0060】
【数12】
【0061】
測定TOAは時刻と完全に相対的ではないため、TOAバイアスが存在する。
【0062】
複数の受信器を使用することによって、前記式は行列に一般化することができる。
【0063】
【数13】
【0064】
または、短い表記法では以下のようになる。
【0065】
【数14】
【0066】
(ru_mat_fullは全受信器の位置を含む)
(u_matは正弦空間の方向ベクトルである)
TOAバイアスは全受信器に共通である。従って、1つのRUを基準とし、他の全てのRUのTOAから基準RUのTOAを減算することによってTOAバイアスを排除でき、測定TDOAが決定される。データを供給する第1のRUを基準RUとして通常選択するが、任意のRUを使用することもできる。
従って、関連行列式は以下のようになる。
【0067】
【数15】
【0068】
式中、(9.1)TDOA1=TOA2−TOA1, TDOA2=TOA3−TOA1,....,TDOAn−1=TOAn−TOA1
変数wは以下の式に従ってu,vに依存する。
【0069】
【数16】
【0070】
従って、u,vのみを求めれば十分であり、式(9)は以下のように変形することができる。
【0071】
【数17】
【0072】
式(11)は、以下のように簡潔に記述することができる。
【0073】
【数18】
【0074】
式(12)の最適な推定解(MMSEまたはML)は以下のように表される。
【0075】
【数19】
【0076】
正弦空間における方向ベクトルはRU位置と測定TDOAベクトルに依存し、初期方位角を与える固定行列の乗法である。
【0077】
なお、式(11)は受信器のz座標を無視している。これは、式の一次性を維持するためである。受信器からターゲットへの距離に対するzの寄与はx,yと比較して無視できるものである。なお、アルゴリズムのその後の工程がzを補償する。
【0078】
方位角における一次元の最適化検索を実行することによって非線型誤差が補償される。検索は、トランスポンダの返信信号からの高度データから計算した距離と高度における方位角の第1の近似値について円弧を作成することによって行われる。円弧の所定数の点を評価のために選択し、各選択点はトランスポンダ返信信号から計算した同じ往復遅延(RTD)を有する。距離と高度はトランスポンダ返信信号によって与えられるため、距離と高度は一定であるものとする。高度を利用することができない場合には、高度を0に設定し、アルゴリズムによってxy面での推定座標を求める。
【0079】
検索を行うために、各方位角の予測TDOAを図9に示す公知のモデルから以下のように計算する。
1.円弧の選択された点のx,y,zを、同一のアンテナを使用する送受信器の場合には一定のRTDを有する円、送信器と受信器が異なるアンテナを使用する場合には一定のRTDを有する楕円を想定して簡単な三角方程式を使用して計算する。
2.各RUへの距離を、円弧上で既に計算したx,y,zと選択されたRUの既知のx1,y1,z1を使用して計算する。この工程は各RUについて繰り返す。
3.各RUでの予測TOAを、距離を光速(c)で除算することによって計算する。
4.基準RU(基準RUは測定TDOAを計算するために選択したRUと同一である)のTOAを各RUのTOAから減算する。
5.得られた結果は検索を評価する際に使用される予測TDOAベクトルである。
【0080】
次に、以下のコスト関数(cost function)を方位角検索について評価する。
【0081】
【数20】
【0082】
式中、tdoa_measjはRU#jの測定TDOAであり、tdoa_expected(azij,R,H)はRU#jの方位角における予測TDOAである。
【0083】
距離Rと高度Hは、トランスポンダ返信信号から導かれた情報と等しく一定に維持される。関数はi点(例えば10)について計算し、各点はトランスポンダ返信信号から計算した同一の往復遅延(RTD)を有し、最小誤差を与える予測TDOAに関連付けられた方位角を選択する。高度を利用することができない場合には、高度を0に設定し、アルゴリズムによってxy平面での推定座標を求める。検索は、新しい方位角(すなわち、最小誤差を与えた方位角)に関してより小さな円弧(例えば、元の円弧の1/10の大きさ)を作成することによって繰り返す。次に、コスト関数を第2のi点(例えば10点)で繰り返す。再び、最小誤差となる予測TDOAに関連付けられた方位角を選択する。この検索プロセスは上述したように所定回数繰り返し、最終方位角はコスト関数から最小TDOA誤差を与える。
【0084】
RTDデータから計算された距離を高度で除算し、得られた結果の逆正弦を取るとターゲットの仰角が得られる。仰角と最適方位角が決定されると、三次元座標は以下の通り計算される。
【0085】
【数21】
【0086】
式中、Rは測定距離であり、az_cは検索プロセスによって計算された最適方位角であり、Heightはトランスポンダ応答の高度データから計算した値である。
【0087】
トランスポンダ応答から高度を計算することができない場合には、高度を0に設定し、x,y座標のみを計算する。
【0088】
RUからの呼掛けに応答するものではないトランスポンダ信号を受信した場合には、RTD情報から距離を決定することができない。このシナリオでは高度が得られない場合があり、ターゲットからの信号は高度データを含まない。高度と距離が利用できない場合には、この方法では式(13)から直接ほぼ正確な方位角と仰角を計算する。精度はアンテナ基線と距離の比率に依存し、距離が増加すると向上する。別の近似値はアンテナアレイのz次元である。アンテナアレイのz次元が基線と相対的に減少すると、近似値の精度は向上する。
【0089】
1つのRUをレーダー送信機として使用し、複数のRUをレーダー受信機として使用すれば、レーダーによるターゲットの位置特定のために同じ方法を採用することができる。上述したように、TDOA情報からの往復遅延と方位角から距離を計算することができる。
【0090】
本発明の別の実施形態を図1〜図3及び図10を参照して説明する。第1の実施形態では、複数のRUを図1に示すように空港の領域内の既知の位置に配置し、少なくとも1つの送信器と3つの受信器の組み合わせが空港内と空港周辺でのターゲットの三次元的な位置特定のために必要であり、RUは送信専用RU、受信専用RUまたは送受信RUであってもよい。
【0091】
第1の実施形態と同様に、各RUは、ターゲットから受信した各トランスポンダ信号の到達時間(TOA)の正確なタイムスタンプを供給するTOA装置2を含む。複数のRU1は、通信手段によって処理装置3に接続されている。送受信器RU4と、ターゲット5と、2つの受信器RU6との間の信号フローは図3に示す通りである。送受信器RU4は呼掛け信号7を送り、ターゲット5のトランスポンダからの応答8を要求する。送受信器RU4は、ターゲットの距離を計算する際に使用するために呼掛け信号7の送信時間を記録する。ターゲット内のトランスポンダは、後述するように許容範囲の既知の時間内で自動的に応答する。返信信号はRU4,6,6によって受信され、データが解読され、TOA装置2からの到達時間(TOA)が追加される。次に、各RUは、更なる評価のためにタイムスタンプを含むデータを、データリンクを介して処理装置3に送信する。また、送受信器RU4は呼掛け信号7の送信時間を、データリンクを介して処理装置3に送信する。
【0092】
処理装置は解読データをクラスタ化し、各クラスタは所定のターゲットから各RUが受信した所定の送信情報を含む。クラスタ化は、ターゲット番号識別、モードSアドレスまたはモード3/Aコードによって通常は行うが、その他の証明された方法も利用することができる。以下に詳細に説明するように、処理装置はRUから供給されたターゲットデータと呼掛け信号の記録送信時間を利用して計算を行い、ターゲットの正確な位置を決定する。
【0093】
ターゲットの高度が既知である場合には、ターゲットの二次元(x,y)推定位置を計算でき、高度をz座標として使用して三次元推定位置を得る。高度は、トランスポンダ返信信号内のターゲットによって供給された高度データから計算でき、あるいはターゲットが地上にあるという判断によって高度を知ることができる。いずれの場合でも、与えられた高度をz座標を供給するために使用するため、本実施形態の距離支援アルゴリズムの最終結果はターゲットの正確なx,y,z位置である。
【0094】
次の工程は、ターゲットの距離を推定位置計算に使用することができるか否かを決定することである。距離は先に開示した距離式によって計算する。計算した距離を使用できるか否かを決定するために距離閾値チェックを行う。距離閾値チェックは、ターゲットのトランスポンダによる呼掛け信号7の信号処理時間のばらつきのために必要となる。返信信号を生成するトランスポンダの処理時間には±0.5μ秒の許容差が適用され、誤差の範囲は約250フィートである。これらの誤差は空港から離れるに従って無視できるようになるが、ターゲットが近い場合には、誤差とターゲットの距離との比率のためにこれらの誤差は非常に大きくなる。従って、ターゲットが空港の所定の領域内にある場合には、RTDデータから計算された距離を使用せずにターゲットの位置を計算することが望ましい。距離閾値は装置展開時に決定し、処理装置3に供給される。
【0095】
RTDデータから計算された距離を使用してターゲットの二次元位置を決定するために、信号を受信したRUの座標、測定TOA、与えられた高度、計算された距離、距離測定RUを、本発明の二次元クローズド距離支援アルゴリズムに入力する。二次元クローズド距離支援アルゴリズムは、与えられた高度をz座標として使用するx,y,z座標として、デカルト座標系におけるターゲットの位置を推定する。
【0096】
アルゴリズムは最初にRU座標とTOAを求め、距離測定RUとしてアルゴリズム内のRU1を設定する。次に、推定位置を計算するために使用される到達時間差(TDOA)を計算するために、その他のRUからのTOAをRU1のTOAから減算する。次に、RU1がデカルト座標系の原点に存在するようにRUの座標を変換し、他のRUから新しい原点(RU1)までの距離を計算する。RUの位置の値の行列を作成し、TDOAとRU距離を結合する新しいベクトルを計算し、推定位置が直接得られる。この時点での推定位置はRU1を原点とするデカルト座標系にあり、与えられた高度をz座標とするx,y,zでのターゲットの最終推定位置を得るためには系中心を原点とする元のデカルト座標系に変換し直すことが必要である。
【0097】
最尤位置推定アルゴリズムの一例である二次元クローズド距離支援アルゴリズムからの推定位置は、MLE(Maximum Likehood Position algorithm:最尤位置推定)距離支援アルゴリズムによってさらに向上させる。二次元MLE距離支援アルゴリズムは、入力として、ターゲットの初期推定位置(高度をz座標として使用)、RUの座標、関連する測定TOA、距離測定値、距離測定RU(RU1)を必要とする。二次元MLE距離支援アルゴリズムは、連続的に新しい推定位置を推定し、新しい推定位置に対応する予測TOAを計算する反復解法である。二次元MLE距離支援アルゴリズムは、計算TOAと測定TOAとの間の誤差を測定するコスト関数をさらに含む。推定位置計算の場合には、コスト関数は、推定位置に対応する予測TOAと測定TOAとの間の標準になるように定義され、さらに詳しく後述するように距離計測が含まれる。最尤位置推定アルゴリズムとして、ニュートン−ラフソン法(Newton−Raphson Method)や滑降シンプレックス法(Simplex Downhill Method)等の他の検索評価方法を使用しても同様の精度の結果を得ることができる。
【0098】
図10は、本実施形態に係る工程のフロー図である。第1の工程は、好ましくは空港の領域内に複数のアンテナ素子(RU)を配置することである。アンテナ素子の少なくとも1つは信号を送受信することができなければならず(送受信RU)、その他のアンテナ素子は受信専用RUであってもよい。
【0099】
送受信RUは呼掛け信号をターゲットに送信し、送信時間を記録する。ターゲットのトランスポンダは、既知のデータ(例えば、モードSアドレス、航空機ID、高度など)を含む返信信号を送信する。呼掛け信号を送信した送受信RUと見通し線または多重通路の問題にさらされていない少なくとも2つの他のRUが応答を受信する。受信データは解読され、TOA情報が付加される。受信データ、TOA、記録された呼掛け信号の送信時間は処理装置3に送信される。処理装置3は、クラスタが複数のRUによって受信された同一のターゲットによる1回の送信からの情報を含むようにターゲットデータをクラスタ化する。
【0100】
二次元推定位置を計算するために、RTDデータから計算された距離を推定位置の精度を向上させるために利用するか否かについて決定する。距離を計算に利用すると決定した場合には、本発明の二次元クローズド距離支援アルゴリズムを使用して二次元推定位置を計算する。計算された二次元推定位置は、上述したように与えられた高度をz座標として使用した二次元MLE距離支援アルゴリズムによってさらに精度を向上させる。
【0101】
以下、二次元距離支援アルゴリズムについて詳細に説明する。
【0102】
二次元クローズド距離支援アルゴリズム
二次元クローズド距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・ターゲット位置のZ成分z’
・測定距離(R)
・距離測定RU(RUr)
二次元クローズド距離支援アルゴリズムの出力は、ターゲットの位置の推定値である。
【0103】
第1の工程は、アルゴリズムにおいて距離測定RUがRU1となるようにRU座標とTOAを求めることである。次の工程は、第1のTOA(RU1からのTOA)を使用してTDOAを計算することである。
【0104】
【数22】
【0105】
次に、RU1が原点となるようにRU座標を変換する。
【0106】
【数23】
【0107】
次に、変換した座標系におけるRUから原点までの距離を計算する。
【0108】
【数24】
【0109】
次に、RU座標値の行列を作成する。
【0110】
【数25】
【0111】
なお、行列の成分は後にAijと言及し、(i,j)は行と列である。
【0112】
次に、TDOAとRU距離を結合する新しいベクトルを作成する。
【0113】
【数26】
【0114】
そして、ターゲットの二次元推定位置を計算する。
【0115】
【数27】
【0116】
RUの座標はプロセスの開始時にRU1が原点となるように変換している。従って、最終推定位置を得るために推定位置を元の座標系に変換することが必要である。
【0117】
【数28】
【0118】
二次元クローズド距離支援アルゴリズムの出力は推定位置(xi,yi,zi)である。
【0119】
二次元MLE距離支援アルゴリズム
二次元MLE距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・初期推定位置(xi,yi,zi)
・距離測定値(Rm)
・距離測定RU
二次元MLE距離支援アルゴリズムの出力は、x,y,zで表されるターゲットの正確な位置である。
【0120】
第1の工程は、アルゴリズムにおいて距離測定RUがRU1となるようにRUを求めることである。二次元MLE距離支援アルゴリズムは、最初に初期推定(xi,yi,zi推定位置)を必要とし、連続的に新しい推定位置を推定する反復解法である。予測TOAを新しい推定位置について計算し、二次元MLE距離支援アルゴリズムのコスト関数は、計算TOAと測定TOAとの間の誤差を計測する。最終位置の計算の場合には、コスト関数は、現在の推定位置(xi,yi,zi)から導かれた予測TOAと測定TOAとの差の標準となるように定義される。ここでも、ターゲットの最終計算位置の精度を向上させるために距離が含まれる。二次元MLE距離支援アルゴリズムは、コスト関数が所定の値以下の値を返すために推定値が十分に近くなるまで反復される。
【0121】
【数29】
【0122】
MLEは、関数fが最小となるまで推定値(xi,yi,zi)を変化させる。
【0123】
本発明の別の実施形態を図1〜2及び図11〜12を参照して説明する。上述した実施形態では、図1に示すように、複数のRUが空港領域内の既知の位置に配置している。一方、本実施形態では、少なくとも4つの受信器と1つの送信器の組み合わせが空港内と空港周辺でのターゲットの三次元的な位置特定のために必要である。ここでも、RUは送信専用RU、受信専用RUまたは送受信RUであってもよく、見通し線(LOS)と多重通路の問題を解消するためにさらに多くのRUが必要な場合がある。
【0124】
上述した実施形態と同様に、各RUは、ターゲットから受信した各トランスポンダ信号の到達時間(TOA)の正確なタイムスタンプを供給するTOA装置2を含む。RU1は、通信手段によって処理装置3に接続されている。送受信器RU4と、ターゲット5と、3つの受信器RU6との間の信号フローは図11に示す通りである。送受信器RU4は呼掛け信号7を送り、ターゲット5のトランスポンダからの応答8を要求する。送受信器RU4は、ターゲットの範囲を計算する際に使用するために呼掛け信号7の送信時間を記録する。ターゲット内のトランスポンダは、上述したように許容範囲の既知の時間内で自動的に応答する。返信信号はRU4,6,6,6によって受信され、データが解読され、TOA装置2からの到達時間(TOA)が追加される。次に、各RUは、更なる評価のためにタイムスタンプを含むデータを、データリンクを介して処理装置3に送信する。また、送受信器RU4は呼掛け信号7の送信時間を、データリンクを介して処理装置3に送信する。
【0125】
処理装置は解読データをクラスタ化し、各クラスタは所定のターゲットから各RUが受信した所定の送信情報を含む。クラスタ化は、ターゲット番号識別、モードSアドレスまたはモード3/Aコードによって通常行うが、その他の証明された方法も利用することができる。以下に詳細に説明するように、処理装置はRUから供給されたターゲットデータと呼掛け信号の記録送信時間を利用して計算を行い、ターゲットの正確な位置を決定する。
【0126】
次の工程は、ターゲットの距離を推定位置計算に使用することができるか否かを決定することである。距離閾値チェックは、上述したようにターゲットのトランスポンダの処理時間のばらつきのために行われる。本実施形態に従ってRTDデータから計算された範囲を使用してターゲットの三次元位置を決定するために、信号を受信したRUの座標、測定TOA、計算された距離、距離測定RUを、本発明の三次元クローズド距離支援アルゴリズムに入力する。三次元クローズド距離支援アルゴリズムは、デカルト座標系のターゲットの推定位置をx,y,zデータとして与え、以下の説明から明らかになるように二次元クローズド距離支援アルゴリズムと類似している。
【0127】
アルゴリズムは最初にRU座標と関連TOAを求め、距離測定RUとしてアルゴリズム内のRU1を設定する。次に、推定位置を計算するために使用される到達時間差(TDOA)を計算するために、その他のRUからのTOAをRU1のTOAから減算する。次に、RU1がデカルト座標系の原点に存在するようにRUの座標を変換し、他のRUから新しい原点(RU1)までの距離を計算する。RUの位置の値の行列を作成し、TDOAとRU距離を結合する新しいベクトルを計算し、推定位置が直接得られる。この時点での推定位置はRU1を原点とするデカルト座標系にあり、x,y,zでのターゲットの最終推定位置を得るためには系中心を原点とする元のデカルト座標系に変換し直すことが必要である。
【0128】
三次元クローズド距離支援アルゴリズムからの推定位置は、三次元MLE(最尤推定位置)距離支援アルゴリズムによってさらに精度を向上させる。三次元MLE距離支援アルゴリズムは、入力として、ターゲットの初期推定位置、RUの座標、関連する測定TOA、距離測定値、距離測定RU(RU1)を必要とする。三次元MLE距離支援アルゴリズムは、連続的に新しい推定位置を推定し、新しい推定位置に対応する予測TOAを計算する反復解法である。三次元MLE距離支援アルゴリズムは、計算TOAと測定TOAとの間の誤差を測定するコスト関数をさらに含む。推定位置計算の場合には、コスト関数は、推定位置に対応する予測TOAと測定TOAとの間の標準になるように定義され、さらに詳しく後述するように距離測定値が含まれる。ニュートン−ラフソン法や滑降シンプレックス法等の他の検索評価方法を使用しても同様の精度の結果を得ることができる。
【0129】
図12は、本実施形態に係る工程のフロー図である。第1の工程は、好ましくは空港の領域内に最低で4つのアンテナ素子(RU)を配置することである。アンテナ素子の少なくとも1つは信号を送受信することができなければならず(送受信RU)、その他のアンテナ素子は受信専用RUであってもよい。
【0130】
送受信RUは呼掛け信号をターゲットに送信し、送信時間を記録する。ターゲットのトランスポンダは、既知のデータ(例えば、モードSアドレス、航空機ID、高度など)を含む返信信号を送信する。呼掛け信号を送信した送受信RUと見通し線または多重通路の問題にさらされていない少なくとも3つの他のRUが応答を受信する。受信データは解読され、TOA情報が付加される。受信データ、TOA、記録された呼掛け信号の送信時間は処理装置3に送信される。処理装置3は、クラスタが複数のRUによって受信された同一のターゲットによる1回の送信からの情報を含むようにターゲットデータをクラスタ化する。
【0131】
三次元位置を計算するために、RTDデータから計算された距離を推定位置の精度を向上させるために利用するか否かについて決定する。距離を計算に利用すると決定した場合には、本発明の三次元クローズド距離支援アルゴリズムを使用して三次元推定位置を計算する。三次元推定位置は、三次元MLE距離支援アルゴリズムによってさらに向上させる。
【0132】
以下、三次元距離支援アルゴリズムについて詳細に説明する。
【0133】
三次元クローズド距離支援アルゴリズム
三次元クローズド距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・測定距離(R)
・距離測定RU(RUr)
三次元クローズド距離支援アルゴリズムの出力は、ターゲットの推定位置である。
【0134】
第1の工程は、アルゴリズムにおいて距離を測定したRUがRU1となるようにRU座標と関連TOAを求めることである。次の工程は、第1のTOA(RU1からのTOA)を使用してTDOAを計算することである。
【0135】
【数30】
【0136】
次に、RU1が原点となるようにRU座標を変換する。
【0137】
【数31】
【0138】
次に、変換した座標系におけるRUから原点までの距離を計算する。
【0139】
【数32】
【0140】
次に、RU座標値の行列を作成する。
【0141】
【数33】
【0142】
なお、行列の成分は後にAijと言及し、(i,j)は行と列である。
【0143】
次に、TDOAとRU距離を結合する新しいベクトルを作成する。
【0144】
【数34】
【0145】
そして、ターゲットの三次元推定位置を計算する。
【0146】
【数35】
【0147】
RUの座標はプロセスの開始時にRU1が原点となるように変換している。従って、最終推定位置を得るために推定位置を元の座標系に変換することが必要である。
【0148】
【数36】
【0149】
三次元クローズド距離支援アルゴリズムの出力はターゲットの推定位置(xi,yi,zi)である。
【0150】
三次元MLE距離支援アルゴリズム
三次元MLE距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・初期推定位置(xi,yi,zi)
・距離測定値(Rm)
・距離測定RU
三次元MLE距離支援アルゴリズムの出力は、x,y,zで表されるターゲットの正確な位置である。
【0151】
三次元クローズド距離支援アルゴリズムと同様に、第1の工程は、アルゴリズムにおいて距離を測定したRUがRU1となるようにRUを求めることである。三次元MLE距離支援アルゴリズムは、最初に初期推測(xi,yi,zi推定位置)を必要とし、連続的に新しい推定位置を推定する反復解法である。予測TOAは新しい推定位置について計算し、三次元MLE距離支援アルゴリズムのコスト関数は、計算TOAと測定TOAとの間の誤差を測定する。最終位置の計算の場合には、コスト関数は、現在の推定位置(xi,yi,zi)から導かれた予測TOAと測定TOAとの差の標準になるように定義される。ターゲットの最終計算位置の精度を向上させるために距離が含まれる。三次元MLE距離支援アルゴリズムは、コスト関数が所定の最小値以下の値を返すために推定値が十分に近くなるまで反復される。
【0152】
【数37】
【0153】
MLEは、関数fが最小となるまで推定値(xi,yi,zi)を変化させる。
【0154】
上述したように、本発明は、高価なレーダー装置を有しないか、購入する余裕のない空港にとって特に有益である。また、本発明は、装置の境界の外部に配置されるアンテナまたはRUを追加することなく、現在の航空管制装置の有効範囲を大きく拡大させるために使用することができる。
【0155】
以上、図面と図面に含まれる表を参照して本発明を説明したが、当業者は請求項によって定義される本発明の範囲から逸脱しない限りにおいて様々な詳細な変更を加えることができることを理解されるだろう。
【図面の簡単な説明】
【0156】
【図1】空港における典型的な受信装置(RU)の配置を示す。
【図2】RU、TOA装置、処理装置の典型的な接続を示す。
【図3】本発明の2つの実施形態に係る往復遅延法を使用してTOAデータを供給し距離を計算する信号の流れを示す。
【図4】異なるRUを距離を決定するための送受信機能に利用する場合の本発明の別の実施形態に係る信号の流れを示す。
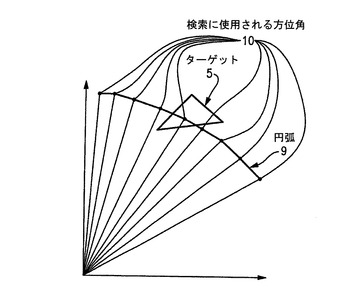
【図5】本発明の好ましい実施形態に係るターゲットの正確な位置を決定するために利用される検索機能を示す。
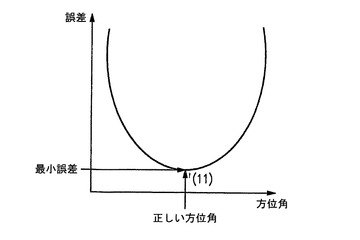
【図6】検索の結果を示すグラフである。
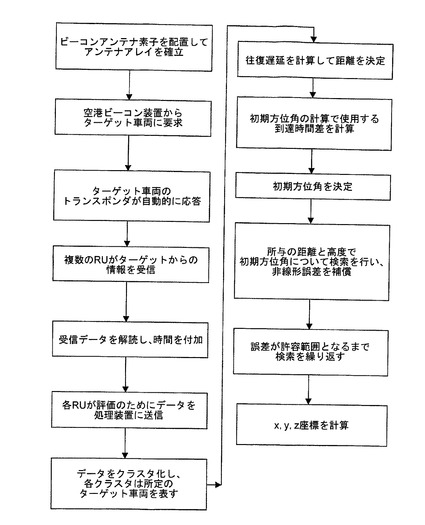
【図7】本発明の一実施形態に係るターゲット位置を決定するために使用する方法のフロー図である。
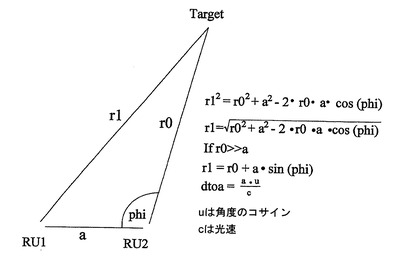
【図8】本発明の一実施形態に係るアルゴリズムを説明するために使用するモデルの二次元図である。
【図9】本発明の一実施形態に係るアルゴリズムをさらに発展させるために使用するモデルの三次元図である。
【図10】本発明の別の実施形態に係るターゲット位置を決定するために使用する別の方法のフロー図である。
【図11】本発明の別の実施形態に係る往復遅延法を使用してTOAデータを供給し距離を計算する信号の流れを示す。
【図12】本発明の別の実施形態に係るターゲット位置を決定するために使用する別の方法のフロー図である。
【技術分野】
【0001】
本発明は、地上用または離陸後の航空管制装置に関し、より詳細には、到着時間差(Time Differential of Arrival:TDOA)分散アンテナを使用する方向探知とターゲットの位置特定に関する。
【背景技術】
【0002】
空港、ターミナル、航空路(en route)用の装置を含む航空管制装置の範囲内または周辺の地上車両や航空機(ターゲット)の位置を特定するための様々な装置と方法が存在する。
【0003】
大きな空港の多くでは、進入レーダー装置を利用して空港外のターゲットの位置特定と追跡を行っている。これらのレーダー装置は、大開口アンテナから得られる細いビームを使用することによって優れた方位角精度を得ており、距離(range)は、レーダーからターゲットに達し、ターゲットからレーダーに戻ってくる信号の往復遅延(round trip delay)から計算する。このような進入レーダー装置は、大きな回転アンテナが通常は必要となるために高価である。また、これらのレーダー装置の更新速度は約4.5秒であり、関連する分析装置の応答速度はレーダーの更新速度によって制限される。
【0004】
ターゲットの位置を特定するための別の方法は多点計測(multilateration)である。通常、多点計測装置は複数のビーコン送信器と受信器を配置することによって構成される。多点計測は、航空機のトランスポンダの送信信号からの情報を使用してターゲットの正確な位置を特定する到着時間差(TDOA)技術である。多点計測のアルゴリズムは、TDOA情報を使用して二次元または三次元座標系におけるターゲットのほぼ正確な位置を推定する。次に、ターゲットの推定位置に対して最適化プロセスを行ってターゲットのより正確な位置を得る。
【0005】
多点計測装置は、滑走路への侵入のために空港における地上のターゲットの位置特定と追跡に使用することができると共に、空港に比較的近い領域での進入する航空機の位置特定と追跡や航空路航空管制装置にも使用することができる。しかし、多点計測装置の周囲の広い領域をカバーする必要がある場合には、ターゲットの距離に対するアンテナ基線(baseline)(受信器間の距離)の比率は、幾何学的測定精度(Geometric Dilution of Precision(GDOP))が非常に大きくなるような値となる。従って、「不確定の楕円(ellipse of uncertainty)」内でターゲットの位置を特定することはより困難になり、多点計測装置からターゲットまでの距離が増加するに従って多点計測装置の有効性は顕著に低下する。
【0006】
従来の多点計測技術における上述した問題を克服する方法としては、多点計測装置の境界の外に外部アンテナ素子を設置してアンテナ基線を増加させることが挙げられる。しかし、この方法では、土地の追加購入、装置の外部のセキュリティ、外部アンテナ素子のメンテナンス、外部アンテナ構成要素と装置の通信、その他のロジスティックな問題に関して困難が生じる。
【0007】
航空管制装置の多くは上述した方法の1つまたはそれらの組み合わせを使用しているが、進入する航空機または滑走路に侵入する地上の車両の位置を特定するための信頼できる方法を有していない空港もある。それらの空港の中には、近隣の設備の整った大きな空港からレーダーデータを得て空港内の航空交通情報を得ている場合もある。この方法は、その他の方法ではこのような情報を得ることができない空港には有益だが、対象となるターゲットが見通し線(line of sight)の問題によってデータを提供する空港のレーダーから不明瞭になってしまう可能性もある。
【0008】
従って、飛行中のターゲットの位置を特定し、空港に進入するターゲットの位置を特定し、滑走路侵入装置の構成要素として地上のターゲットの位置を特定し、進入装置と滑走路侵入装置との間の切り替えを改善し、装置の境界外にアンテナ素子を設置することなく既存の航空管制装置を利用してターゲットの位置特定の範囲と精度を高めることができる航空管制装置を提供するための信頼性が高く比較的安価な解決手段が求められている。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明の目的は、既存の航空管制装置を利用すると共に、大開口アンテナ、機械回転アンテナまたは装置の境界外に設置される追加の受信器を必要とすることなく、高い方向・位置特定精度を達成するための装置と方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明は、複数のターゲット位置特定方法を実施するために使用することができる装置に関する。装置は、ターゲットに信号を送信するための少なくとも1つの送信器と、ターゲットからの返信信号を受信するための少なくとも1つの受信器とを含み、信号の往復遅延(Round Trip Delay:RTD)を計算する。装置は、ターゲットからの返信信号を受信するための少なくとも3つの受信器と、各受信器における信号の到達時間(TOA)を決定するための装置と、をさらに含む。また、装置は、詳細を後述するように、本発明の方法に従って到達時間差(TDOA)を計算し、位置特定計算を行う中央処理装置(central processor)も含む。
【0011】
本発明の方法は、ターゲットのトランスポンダ信号から得られるTDOAとRTDとのデータを使用して少なくともターゲットの推定位置を計算する。TDOAは、複数の受信器が信号を受信する場合に、ターゲットからのトランスポンダ信号のTOAを測定することによって計算される。RTDを計算するために利用される受信器は、TDOAを計算するために使用される3つの受信器の1つとしても機能することができる。各TOAは指定された受信器のTOAから減算され、TDOAが得られる。送信器からターゲットに呼掛け信号を送信し、呼掛け信号の送信時間とターゲットから受信器までの返信信号の到達時間との間の遅延時間を測定することによって、RTDを決定する。RTDデータは、次にターゲットの正確な距離を計算するために使用することができる。RTDデータから得られる距離と共にTDOAデータを使用することによって、従来の多点計測技術に関連する距離GDOPの問題が克服され、距離精度、従って全体的な位置精度が飛躍的に向上する。
【0012】
本発明の一実施形態に係る方法では、効果的にアンテナアレイを形成する少なくとも3つのアンテナ素子(受信装置、「RU」)によって受信されたトランスポンダ応答のTDOAデータに基づいてターゲットの方位角を計算する。ターゲットの距離が基線よりも非常に大きい場合には、方位角と仰角を計算する簡単な線形近似を使用することができる。距離のみまたは距離と高度が利用できる場合には、所与の距離と測定TDOAに最も適合する高度での方位角検索を行うことによって測定精度を大きく向上させることができる。
【0013】
地上のRUによって受信される信号は、通常はターゲットである航空機のトランスポンダによって生成される。データが地上の送信器からの呼掛け信号に対する応答として受信された場合、メッセージの往復遅延を計算し、距離計算に使用するために保存する。
【0014】
受信データはRUによって処理され、到着時間差(TDOA)の計算に使用される到着時間(TOA)情報が付加され、さらなる評価のために処理装置に送られる。処理装置は、各クラスタが所定のターゲットからの所定の送信情報(transmission)を表すクラスタにデータを分類し、評価して方位角の初期推定値を得る。次に、初期方位角の周辺で検索を行って非線型誤差を補償する。検索は、RTDデータから計算した距離とトランスポンダ応答内の高度データから計算した高度における初期方位角について円弧を作成することによって行われる。円弧の大きさは、アンテナ基線の大きさの約2倍に設定される。円弧に沿った所定数の点を評価のために選択し、各選択点はトランスポンダ返信信号から計算した同一のRTDを有する。
【0015】
円弧上の各選択点について予測TDOAを計算し、予測TDOAを測定TDOAと比較すると誤差が得られる。最小誤差を有する予測TDOAに関連付けられた方位角を、ターゲットのより正確な方位角として選択する。次に、得られたより正確な方位角とRTDデータを使用してターゲットのより正確な平面位置を計算する。
【0016】
検索はより小さな円弧を使用して所定回数繰り返され、推定位置の精度を向上させる。距離が利用できない場合には、この方法では推定方位角と仰角のみを計算する。検索から最小誤差となる方位角を選択する。最後に、x,y位置を計算し、高度データから計算される場合には高度(z)を含める。
【0017】
本発明の別の実施形態に係る方法は、上述したようにトランスポンダ信号が少なくとも3つの受信器によって受信された場合のTOA及びRTD情報を使用してターゲットの二次元推定位置を計算する。本実施形態によれば、ターゲットの高度は既知であり、z座標として使用してターゲットの推定位置の精度を向上させる。高度は、トランスポンダ信号に含まれるターゲットから供給された高度データを使用して計算でき、あるいはターゲットが地上にあるという判断から高度を得ることができる。本実施形態によれば、測定TOA、ターゲットの高度、計算距離をRUの座標とともにクローズド距離支援アルゴリズムに供給する。本発明のこの方法では、ターゲットの二次元(x,y)推定位置を計算し、高度をz座標として使用して三次元推定位置を得る。
【0018】
次に、推定位置、ターゲットの高度、計算距離を検索に使用し、推定位置の精度をさらに向上させる。検索はターゲットの新しい推定位置を推定し、新しい推定位置に対応するTOAを計算する。検索は、元(現在)の推定位置のTOAと新しい推定位置のTOAとの間の誤差を計測するコスト関数をさらに含む。最小誤差をもたらす推定位置を新しい現在の推定位置として選択する。検索は、誤差が所定の最小値以下となるまで、最小誤差となる推定位置を新しい現在の推定位置として使用して繰り返される。
【0019】
本発明のさらに別の実施形態に係る方法は、上述したようにトランスポンダ信号が少なくとも4つの受信器によって受信された場合のTOA及びRTD情報を使用してターゲットの三次元推定位置を計算する。本実施形態によれば、ターゲットの高度は未知である。従って、測定TOAと計算距離のみをRUの座標とともにクローズド距離支援アルゴリズムに供給する。この方法では、TOA及びRTDデータから直接ターゲットの三次元(x,y,z)推定位置を計算する。
【0020】
次に、三次元推定位置と計算距離を使用して検索を行い、推定位置の精度をさらに向上させる。検索ではターゲットの新しい推定位置を推定し、新しい推定位置に対応するTOAを計算する。検索は、元(現在)の推定位置のTOAと新しい推定位置のTOAとの間の誤差を計測するコスト関数をさらに含む。最小誤差となる推定位置を新しい現在の推定位置として選択する。検索は、誤差が所定の最小値以下となるまで、最小誤差となる推定位置を新しい現在推定位置として使用して繰り返される。
【0021】
本発明の特徴及び目的のさらなる理解のために、添付図面を参照して本発明を実施するための好適な形態を以下に詳細に説明する。
【発明を実施するための最良の形態】
【0022】
以下、本発明の一実施形態を図1〜図9を参照して説明する。図1に示すように、複数のアンテナ素子1(以下「受信装置」(RU)という)が空港領域内の既知の位置に配置され、アンテナアレイを構成している。代表的なRUはセンシス社(Sensis Corporation)(型番100−008121−G001)から販売されている。RUの距離と配置は、アンテナアレイ基線(baseline)または基線と呼ぶ。本実施形態では、少なくとも1つの送信器と3つの受信器の組み合わせが空港内と空港周辺でのターゲットの三次元的な位置特定のために必要である。RUは、送信専用RU、受信専用RUまたは送受信RUであってもよい。空港内と空港周辺の地形と建物のレイアウトによっては、見通し線(Line of Sight;LOS)と多重通路の問題を解消するためにさらに多くのRUが必要な場合がある。本発明によれば、空港の領域内に全てのRUを配置することができ、メンテナンスとセキュリティが容易になると共に通信が簡素化される。好ましい実施形態では、送信アンテナ素子は1030MHzの位相変調アップリンク信号を送信することができ、受信アンテナ素子は1090MHzの振幅変調ダウンリンク信号を受信することができる。ただし、その他の信号も使用することができる。
【0023】
図2に示すように、各RU1は、ターゲットから受信した各トランスポンダ信号の到達時間(TOA)を正確に測定するTOA装置2を含む。RU1は、ローカルエリアネットワーク(LAN)等の通信手段によって、位置特定計算を行う処理装置3に接続されている。また、Rf(無線周波数)リンクや電話技術等の他の通信手段も使用することができ、本発明は通信手段によって限定されるものではない。
【0024】
ある意味では、図1に示すRUのレイアウトと図2に示す装置は、従来の多点計測技術を使用してターゲットの位置を特定するために採用されるものと同様である。しかし、上述したように、ターゲットの距離に関連付けられるGDOPは、ターゲットの距離に対するアンテナ基線(受信器間の距離)の比率が減少するに従ってかなり大きくなる。従って、「不確定の楕円」内でターゲットの位置を特定することはより困難になり、多点計測装置からターゲットまでの距離が増加するに従って多点計測装置の有効性は顕著に低下する。一方、本発明によれば、図1と図2に示すようなRUインフラの有効範囲を拡張するために距離支援位置アルゴリズム(range aided position algorithm)を使用し、以下に詳細に説明するように、装置から非常に離れたターゲットの位置を正確に特定する。
【0025】
図3は、送受信RU4と、ターゲット5と、2つの受信RU6との間の信号の流れを示す。送受信RU4は呼掛け信号7を送り、ターゲット5のトランスポンダからの応答8を要求する。送受信RU4は、ターゲットの距離を計算する際に使用するために呼掛け信号7の送信時間を記録する。ターゲット内のトランスポンダは、後述するように許容範囲の既知の時間(内部遅延)内で自動的に応答する。返信信号はRU4,6,6によって受信され、データが解読され、TOA装置2からの到達時間(TOA)が追加される。グローバルポジショニング装置(GPS)データ、局所的時計、内部カウンタなどの様々な方法を、TOAを決定するために使用することができるが、本発明はそれらに限定されるものではない。トランスポンダの返信信号は、航空交通管制官が使用するための豊富な情報を含んでいる。このような情報としては、要求された応答の種類に応じてモードSアドレス、飛行識別番号、高度データが挙げられるが、本発明はそれらに限定されるものではない。次に、各RUは、更なる評価のためにタイムスタンプを含むデータを、データリンクを介して処理装置3に送信する。また、送受信RU4は呼掛け信号7の送信時間を、データリンクを介して処理装置3に送信する。
【0026】
処理装置は解読データをクラスタ化し、各クラスタは所定のターゲットから各RUが受信した所定の送信情報を含む。クラスタ化(clustering)は、ターゲット識別番号、モードSアドレスまたはモード3/Aコードによって通常は行うが、その他の証明された方法も利用することができる。以下に詳細に説明するように、処理装置はRUから供給されたターゲットデータと記録された呼掛け信号の送信時間を利用して計算を行い、ターゲットの正確な位置を決定する。
【0027】
送受信RU4からターゲットに呼掛け信号が送信された時間は、ターゲットのトランスポンダの内部遅延及び送受信RU4でのターゲットの返信信号の到達時間と共に既知である。このデータは、往復遅延を計算してターゲットの正確な距離を決定するために使用される。好ましい実施形態では、距離計算に使用される信号を送受信するために同一のアンテナを使用する。このようにして、往復遅延データのみに基づいてターゲットとなる航空機の正確な距離を下記式によって計算することができる。
【0028】
【数1】
【0029】
式中、Rは距離であり、RTDは往復遅延(呼掛け信号の送信から返信信号の受信までの経過時間)であり、delayはターゲットのトランスポンダの内部遅延であり、cは光速である。
【0030】
別の実施形態では、図4に示すように、送信RU40を3つの受信RU60と組み合わせて使用することができる(すなわち、信号の送受信は同一のアンテナを介して行われない)。本実施形態を採用する場合、ターゲットの方位角を計算した後でなければターゲットの正確な距離は分からない。すなわち、往復遅延は送信RU40のアンテナから受信RU60の1つのアンテナまでにおいて測定されるため、ターゲットの方位角が計算されるまではターゲットの正確な距離は分からない。ただし、図3と図4に示すシナリオでは、距離が往復遅延データから計算されるため、従来技術の多点計測技術に関連するGDOPの問題を解消することができ、RUインフラに変更を加えることなく距離精度が劇的に向上する(例えば、空港外の20マイルを超える距離)。
【0031】
なお、ターゲットの距離を計算するために往復遅延を単独(図3)またはターゲットの方位角と組み合わせて(図4)使用することは、方法の一工程に過ぎない。次の工程では、各ターゲットに対してクラスタ化TDOAデータを使用することが必要である。すなわち、同一のクラスタに属するトランスポンダ応答間のTDOAは、時間的バイアスを効果的に排除する基準としての1つのRUからのTOAを利用することで計算される。これらのTDOAを測定TDOAと呼ぶ。次に、線形近似を使用して測定TDOAをRUの既知の位置と関連して評価することによって方位角の第1の近似値を計算する。
【0032】
さらに、測定範囲及び高度における測定TDOAと最も一致する方位角の第1の近似値付近での方位角検索によってデータの精度をさらに向上させる。高度は、従来技術で知られているようにトランスポンダ応答に含まれる高度データから計算する。図5に示すように、トランスポンダ応答(返信信号)からの高度データから決定した高度と距離における方位角の第1の近似値について円弧9を生成する。本発明の好ましい実施形態(図3)では、検索を非常に簡素化するように、(往復遅延に基づく)距離計算に使用するために呼掛け信号を送信し、トランスポンダ返信信号を受信するために同一のアンテナが利用されているため、生成された円弧は円の一部を示す。呼掛け信号を送信し、トランスポンダ返信信号を受信するために異なるアンテナを利用した場合(図4)には、円弧は楕円の一部を示すことになる。この場合には検索アルゴリズムが多少複雑になるが、全くあるいはほとんど精度を低下させることなく検索を行うことができる。
【0033】
例えば、円弧はアンテナ基線(最も離れた2つのRU間の距離)の大きさの約2倍(実質的に2倍)となるように選択し、それぞれが返信信号から計算した場合に同じ往復遅延(RTD)を有する10個の点(方位角)10を円弧9に沿って設定する。検索時の各方位角点について、TDOAを後述する公知のモデルから計算する。これらのTDOAを予測TDOAと呼ぶ。次に、予測TDOAと測定TDOAとの最小誤差を計算する。図6に示すように、最小誤差11となる予測TDOAに関連付けられた方位角を選択する。好ましくは、円弧は新しい方位角を中心として原寸の10分の1まで縮小し、第2の群の新しい10個の点を小さな円弧上に設定する。このプロセスは、例えばアンテナ基線サイズ及びアンテナの距離精度を含む装置パラメータに基づいて所定回数繰り返す。繰り返し数は所与の装置に特有であり、装置の展開時に決定する。
【0034】
往復遅延データから正確な範囲を決定し、トランスポンダ応答によって得られる高度データから高度を計算しているため、検索は一次元で行われ、多点計測検索と比較して複雑さをかなり減少させることができる。最速降下法(Steepest Rate of Descent techniques)などの他の検索評価方法を使用しても同様の精度の結果を得ることができる。
【0035】
次に、最終的に計算した方位角と距離及びトランスポンダの返信信号の高度データから計算した高度からx,y,z座標を決定し、ターゲットの正確な三次元位置を特定する。このデータは、航空管制オペレータに対して表示することができる。
【0036】
図7は、本実施形態に係る工程のフロー図である。第1の工程は、好ましくは空港の領域内に複数のアンテナ素子を配置することである。好ましい実施形態では、アンテナ素子の少なくとも1つは信号を送受信し(送受信RU)、その他のアンテナ素子は受信専用RUであってもよい。
【0037】
送受信RUは信号をターゲットに送信し、ターゲットは既知のデータ(例えば、航空機ID、高度など)を含む返信信号を送信する。返信信号は、呼掛け信号を送信した送受信RUのアンテナまたは別のRUのアンテナを介して受信される。また、返信信号は少なくとも2つの他のRUにも受信される。受信データは解読されてTOA情報が付加され、次に処理装置3に送信され、クラスタ化されると共にターゲットの距離と初期(ほぼ正確な)方位角を計算するために利用される。
【0038】
図3に示す好ましい実施形態によれば、返信信号は呼掛け信号を送信したアンテナを介して受信され、ターゲットの正確な距離を得るために往復遅延を使用することができる。次に、測定TDOAを計算・評価してターゲットの初期方位角を決定し、初期方位角の周囲で検索を実行して非線型誤差を補償する。検索は、装置パラメータに基づいて所定回数繰り返される。次に、ターゲットの正確な三次元位置を決定する(ターゲットの高度はターゲットからの返信信号に含まれる高度データによって決定する)。
【0039】
本実施形態によれば、ターゲットの初期(ほぼ正確な)方位角を決定するために特定のアルゴリズムを使用する。初期方位角周辺で検索を実行し、ターゲットのより正確な方位角を得るためには別の特定のアルゴリズムを使用する。それらのアルゴリズムを開発した方法を以下に説明する。
【0040】
図8に、2つのRUによる返信信号受信の幾何学的表現を示す。測定TDOAのための正確な式は、コサイン定理を利用して以下のように導かれる。
【0041】
【数2】
【0042】
【数3】
【0043】
テイラー級数に展開すると、a≪r0について一次式が得られる。
【0044】
【数4】
【0045】
【数5】
【0046】
なお、r1−r0はターゲットと各RUとの距離の差を表す。変数uは、簡単な代数演算を使用して測定TDOAから直接計算することができる。
【0047】
【数6】
【0048】
(式中、uは角度phiのコサインであり、cは光速である。)
図9に示す座標系を使用することによって、この近似値は以下のように三次元に拡張される。
【0049】
【数7】
【0050】
式中、rlはターゲットからRUまでの正確な距離であり、(x,y,z)はターゲットの座標であり、(x1,y1,z1)は受信RUの座標である。
【0051】
原点からのターゲットの距離はr0と表される。
【0052】
【数8】
【0053】
r0≫(x1,y1,z1)の場合、適切なテイラー級数からの一次展開近似値は以下のように表される。
【0054】
【数9】
【0055】
【数10】
【0056】
(式中、azとelはそれぞれ方位角と仰角である。)
従って、距離の式は次のようになる。
【0057】
【数11】
【0058】
当業者には明らかなように、テイラー級数の一次部分のみを評価すると非線型誤差が引き起こされるが、許容できる方位角の一次近似値を得ることができる。これらの誤差の影響は、詳細を後述する検索によって緩和される。
【0059】
各受信器(RU)へのTOAは以下のように表される。
【0060】
【数12】
【0061】
測定TOAは時刻と完全に相対的ではないため、TOAバイアスが存在する。
【0062】
複数の受信器を使用することによって、前記式は行列に一般化することができる。
【0063】
【数13】
【0064】
または、短い表記法では以下のようになる。
【0065】
【数14】
【0066】
(ru_mat_fullは全受信器の位置を含む)
(u_matは正弦空間の方向ベクトルである)
TOAバイアスは全受信器に共通である。従って、1つのRUを基準とし、他の全てのRUのTOAから基準RUのTOAを減算することによってTOAバイアスを排除でき、測定TDOAが決定される。データを供給する第1のRUを基準RUとして通常選択するが、任意のRUを使用することもできる。
従って、関連行列式は以下のようになる。
【0067】
【数15】
【0068】
式中、(9.1)TDOA1=TOA2−TOA1, TDOA2=TOA3−TOA1,....,TDOAn−1=TOAn−TOA1
変数wは以下の式に従ってu,vに依存する。
【0069】
【数16】
【0070】
従って、u,vのみを求めれば十分であり、式(9)は以下のように変形することができる。
【0071】
【数17】
【0072】
式(11)は、以下のように簡潔に記述することができる。
【0073】
【数18】
【0074】
式(12)の最適な推定解(MMSEまたはML)は以下のように表される。
【0075】
【数19】
【0076】
正弦空間における方向ベクトルはRU位置と測定TDOAベクトルに依存し、初期方位角を与える固定行列の乗法である。
【0077】
なお、式(11)は受信器のz座標を無視している。これは、式の一次性を維持するためである。受信器からターゲットへの距離に対するzの寄与はx,yと比較して無視できるものである。なお、アルゴリズムのその後の工程がzを補償する。
【0078】
方位角における一次元の最適化検索を実行することによって非線型誤差が補償される。検索は、トランスポンダの返信信号からの高度データから計算した距離と高度における方位角の第1の近似値について円弧を作成することによって行われる。円弧の所定数の点を評価のために選択し、各選択点はトランスポンダ返信信号から計算した同じ往復遅延(RTD)を有する。距離と高度はトランスポンダ返信信号によって与えられるため、距離と高度は一定であるものとする。高度を利用することができない場合には、高度を0に設定し、アルゴリズムによってxy面での推定座標を求める。
【0079】
検索を行うために、各方位角の予測TDOAを図9に示す公知のモデルから以下のように計算する。
1.円弧の選択された点のx,y,zを、同一のアンテナを使用する送受信器の場合には一定のRTDを有する円、送信器と受信器が異なるアンテナを使用する場合には一定のRTDを有する楕円を想定して簡単な三角方程式を使用して計算する。
2.各RUへの距離を、円弧上で既に計算したx,y,zと選択されたRUの既知のx1,y1,z1を使用して計算する。この工程は各RUについて繰り返す。
3.各RUでの予測TOAを、距離を光速(c)で除算することによって計算する。
4.基準RU(基準RUは測定TDOAを計算するために選択したRUと同一である)のTOAを各RUのTOAから減算する。
5.得られた結果は検索を評価する際に使用される予測TDOAベクトルである。
【0080】
次に、以下のコスト関数(cost function)を方位角検索について評価する。
【0081】
【数20】
【0082】
式中、tdoa_measjはRU#jの測定TDOAであり、tdoa_expected(azij,R,H)はRU#jの方位角における予測TDOAである。
【0083】
距離Rと高度Hは、トランスポンダ返信信号から導かれた情報と等しく一定に維持される。関数はi点(例えば10)について計算し、各点はトランスポンダ返信信号から計算した同一の往復遅延(RTD)を有し、最小誤差を与える予測TDOAに関連付けられた方位角を選択する。高度を利用することができない場合には、高度を0に設定し、アルゴリズムによってxy平面での推定座標を求める。検索は、新しい方位角(すなわち、最小誤差を与えた方位角)に関してより小さな円弧(例えば、元の円弧の1/10の大きさ)を作成することによって繰り返す。次に、コスト関数を第2のi点(例えば10点)で繰り返す。再び、最小誤差となる予測TDOAに関連付けられた方位角を選択する。この検索プロセスは上述したように所定回数繰り返し、最終方位角はコスト関数から最小TDOA誤差を与える。
【0084】
RTDデータから計算された距離を高度で除算し、得られた結果の逆正弦を取るとターゲットの仰角が得られる。仰角と最適方位角が決定されると、三次元座標は以下の通り計算される。
【0085】
【数21】
【0086】
式中、Rは測定距離であり、az_cは検索プロセスによって計算された最適方位角であり、Heightはトランスポンダ応答の高度データから計算した値である。
【0087】
トランスポンダ応答から高度を計算することができない場合には、高度を0に設定し、x,y座標のみを計算する。
【0088】
RUからの呼掛けに応答するものではないトランスポンダ信号を受信した場合には、RTD情報から距離を決定することができない。このシナリオでは高度が得られない場合があり、ターゲットからの信号は高度データを含まない。高度と距離が利用できない場合には、この方法では式(13)から直接ほぼ正確な方位角と仰角を計算する。精度はアンテナ基線と距離の比率に依存し、距離が増加すると向上する。別の近似値はアンテナアレイのz次元である。アンテナアレイのz次元が基線と相対的に減少すると、近似値の精度は向上する。
【0089】
1つのRUをレーダー送信機として使用し、複数のRUをレーダー受信機として使用すれば、レーダーによるターゲットの位置特定のために同じ方法を採用することができる。上述したように、TDOA情報からの往復遅延と方位角から距離を計算することができる。
【0090】
本発明の別の実施形態を図1〜図3及び図10を参照して説明する。第1の実施形態では、複数のRUを図1に示すように空港の領域内の既知の位置に配置し、少なくとも1つの送信器と3つの受信器の組み合わせが空港内と空港周辺でのターゲットの三次元的な位置特定のために必要であり、RUは送信専用RU、受信専用RUまたは送受信RUであってもよい。
【0091】
第1の実施形態と同様に、各RUは、ターゲットから受信した各トランスポンダ信号の到達時間(TOA)の正確なタイムスタンプを供給するTOA装置2を含む。複数のRU1は、通信手段によって処理装置3に接続されている。送受信器RU4と、ターゲット5と、2つの受信器RU6との間の信号フローは図3に示す通りである。送受信器RU4は呼掛け信号7を送り、ターゲット5のトランスポンダからの応答8を要求する。送受信器RU4は、ターゲットの距離を計算する際に使用するために呼掛け信号7の送信時間を記録する。ターゲット内のトランスポンダは、後述するように許容範囲の既知の時間内で自動的に応答する。返信信号はRU4,6,6によって受信され、データが解読され、TOA装置2からの到達時間(TOA)が追加される。次に、各RUは、更なる評価のためにタイムスタンプを含むデータを、データリンクを介して処理装置3に送信する。また、送受信器RU4は呼掛け信号7の送信時間を、データリンクを介して処理装置3に送信する。
【0092】
処理装置は解読データをクラスタ化し、各クラスタは所定のターゲットから各RUが受信した所定の送信情報を含む。クラスタ化は、ターゲット番号識別、モードSアドレスまたはモード3/Aコードによって通常は行うが、その他の証明された方法も利用することができる。以下に詳細に説明するように、処理装置はRUから供給されたターゲットデータと呼掛け信号の記録送信時間を利用して計算を行い、ターゲットの正確な位置を決定する。
【0093】
ターゲットの高度が既知である場合には、ターゲットの二次元(x,y)推定位置を計算でき、高度をz座標として使用して三次元推定位置を得る。高度は、トランスポンダ返信信号内のターゲットによって供給された高度データから計算でき、あるいはターゲットが地上にあるという判断によって高度を知ることができる。いずれの場合でも、与えられた高度をz座標を供給するために使用するため、本実施形態の距離支援アルゴリズムの最終結果はターゲットの正確なx,y,z位置である。
【0094】
次の工程は、ターゲットの距離を推定位置計算に使用することができるか否かを決定することである。距離は先に開示した距離式によって計算する。計算した距離を使用できるか否かを決定するために距離閾値チェックを行う。距離閾値チェックは、ターゲットのトランスポンダによる呼掛け信号7の信号処理時間のばらつきのために必要となる。返信信号を生成するトランスポンダの処理時間には±0.5μ秒の許容差が適用され、誤差の範囲は約250フィートである。これらの誤差は空港から離れるに従って無視できるようになるが、ターゲットが近い場合には、誤差とターゲットの距離との比率のためにこれらの誤差は非常に大きくなる。従って、ターゲットが空港の所定の領域内にある場合には、RTDデータから計算された距離を使用せずにターゲットの位置を計算することが望ましい。距離閾値は装置展開時に決定し、処理装置3に供給される。
【0095】
RTDデータから計算された距離を使用してターゲットの二次元位置を決定するために、信号を受信したRUの座標、測定TOA、与えられた高度、計算された距離、距離測定RUを、本発明の二次元クローズド距離支援アルゴリズムに入力する。二次元クローズド距離支援アルゴリズムは、与えられた高度をz座標として使用するx,y,z座標として、デカルト座標系におけるターゲットの位置を推定する。
【0096】
アルゴリズムは最初にRU座標とTOAを求め、距離測定RUとしてアルゴリズム内のRU1を設定する。次に、推定位置を計算するために使用される到達時間差(TDOA)を計算するために、その他のRUからのTOAをRU1のTOAから減算する。次に、RU1がデカルト座標系の原点に存在するようにRUの座標を変換し、他のRUから新しい原点(RU1)までの距離を計算する。RUの位置の値の行列を作成し、TDOAとRU距離を結合する新しいベクトルを計算し、推定位置が直接得られる。この時点での推定位置はRU1を原点とするデカルト座標系にあり、与えられた高度をz座標とするx,y,zでのターゲットの最終推定位置を得るためには系中心を原点とする元のデカルト座標系に変換し直すことが必要である。
【0097】
最尤位置推定アルゴリズムの一例である二次元クローズド距離支援アルゴリズムからの推定位置は、MLE(Maximum Likehood Position algorithm:最尤位置推定)距離支援アルゴリズムによってさらに向上させる。二次元MLE距離支援アルゴリズムは、入力として、ターゲットの初期推定位置(高度をz座標として使用)、RUの座標、関連する測定TOA、距離測定値、距離測定RU(RU1)を必要とする。二次元MLE距離支援アルゴリズムは、連続的に新しい推定位置を推定し、新しい推定位置に対応する予測TOAを計算する反復解法である。二次元MLE距離支援アルゴリズムは、計算TOAと測定TOAとの間の誤差を測定するコスト関数をさらに含む。推定位置計算の場合には、コスト関数は、推定位置に対応する予測TOAと測定TOAとの間の標準になるように定義され、さらに詳しく後述するように距離計測が含まれる。最尤位置推定アルゴリズムとして、ニュートン−ラフソン法(Newton−Raphson Method)や滑降シンプレックス法(Simplex Downhill Method)等の他の検索評価方法を使用しても同様の精度の結果を得ることができる。
【0098】
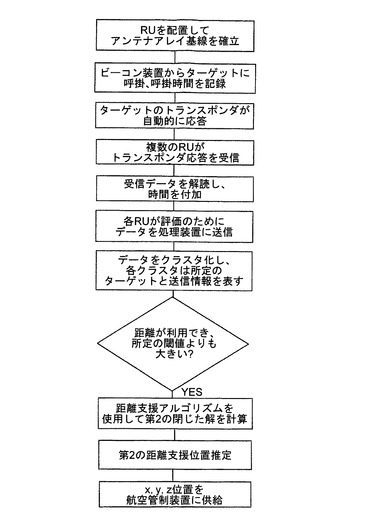
図10は、本実施形態に係る工程のフロー図である。第1の工程は、好ましくは空港の領域内に複数のアンテナ素子(RU)を配置することである。アンテナ素子の少なくとも1つは信号を送受信することができなければならず(送受信RU)、その他のアンテナ素子は受信専用RUであってもよい。
【0099】
送受信RUは呼掛け信号をターゲットに送信し、送信時間を記録する。ターゲットのトランスポンダは、既知のデータ(例えば、モードSアドレス、航空機ID、高度など)を含む返信信号を送信する。呼掛け信号を送信した送受信RUと見通し線または多重通路の問題にさらされていない少なくとも2つの他のRUが応答を受信する。受信データは解読され、TOA情報が付加される。受信データ、TOA、記録された呼掛け信号の送信時間は処理装置3に送信される。処理装置3は、クラスタが複数のRUによって受信された同一のターゲットによる1回の送信からの情報を含むようにターゲットデータをクラスタ化する。
【0100】
二次元推定位置を計算するために、RTDデータから計算された距離を推定位置の精度を向上させるために利用するか否かについて決定する。距離を計算に利用すると決定した場合には、本発明の二次元クローズド距離支援アルゴリズムを使用して二次元推定位置を計算する。計算された二次元推定位置は、上述したように与えられた高度をz座標として使用した二次元MLE距離支援アルゴリズムによってさらに精度を向上させる。
【0101】
以下、二次元距離支援アルゴリズムについて詳細に説明する。
【0102】
二次元クローズド距離支援アルゴリズム
二次元クローズド距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・ターゲット位置のZ成分z’
・測定距離(R)
・距離測定RU(RUr)
二次元クローズド距離支援アルゴリズムの出力は、ターゲットの位置の推定値である。
【0103】
第1の工程は、アルゴリズムにおいて距離測定RUがRU1となるようにRU座標とTOAを求めることである。次の工程は、第1のTOA(RU1からのTOA)を使用してTDOAを計算することである。
【0104】
【数22】
【0105】
次に、RU1が原点となるようにRU座標を変換する。
【0106】
【数23】
【0107】
次に、変換した座標系におけるRUから原点までの距離を計算する。
【0108】
【数24】
【0109】
次に、RU座標値の行列を作成する。
【0110】
【数25】
【0111】
なお、行列の成分は後にAijと言及し、(i,j)は行と列である。
【0112】
次に、TDOAとRU距離を結合する新しいベクトルを作成する。
【0113】
【数26】
【0114】
そして、ターゲットの二次元推定位置を計算する。
【0115】
【数27】
【0116】
RUの座標はプロセスの開始時にRU1が原点となるように変換している。従って、最終推定位置を得るために推定位置を元の座標系に変換することが必要である。
【0117】
【数28】
【0118】
二次元クローズド距離支援アルゴリズムの出力は推定位置(xi,yi,zi)である。
【0119】
二次元MLE距離支援アルゴリズム
二次元MLE距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・初期推定位置(xi,yi,zi)
・距離測定値(Rm)
・距離測定RU
二次元MLE距離支援アルゴリズムの出力は、x,y,zで表されるターゲットの正確な位置である。
【0120】
第1の工程は、アルゴリズムにおいて距離測定RUがRU1となるようにRUを求めることである。二次元MLE距離支援アルゴリズムは、最初に初期推定(xi,yi,zi推定位置)を必要とし、連続的に新しい推定位置を推定する反復解法である。予測TOAを新しい推定位置について計算し、二次元MLE距離支援アルゴリズムのコスト関数は、計算TOAと測定TOAとの間の誤差を計測する。最終位置の計算の場合には、コスト関数は、現在の推定位置(xi,yi,zi)から導かれた予測TOAと測定TOAとの差の標準となるように定義される。ここでも、ターゲットの最終計算位置の精度を向上させるために距離が含まれる。二次元MLE距離支援アルゴリズムは、コスト関数が所定の値以下の値を返すために推定値が十分に近くなるまで反復される。
【0121】
【数29】
【0122】
MLEは、関数fが最小となるまで推定値(xi,yi,zi)を変化させる。
【0123】
本発明の別の実施形態を図1〜2及び図11〜12を参照して説明する。上述した実施形態では、図1に示すように、複数のRUが空港領域内の既知の位置に配置している。一方、本実施形態では、少なくとも4つの受信器と1つの送信器の組み合わせが空港内と空港周辺でのターゲットの三次元的な位置特定のために必要である。ここでも、RUは送信専用RU、受信専用RUまたは送受信RUであってもよく、見通し線(LOS)と多重通路の問題を解消するためにさらに多くのRUが必要な場合がある。
【0124】
上述した実施形態と同様に、各RUは、ターゲットから受信した各トランスポンダ信号の到達時間(TOA)の正確なタイムスタンプを供給するTOA装置2を含む。RU1は、通信手段によって処理装置3に接続されている。送受信器RU4と、ターゲット5と、3つの受信器RU6との間の信号フローは図11に示す通りである。送受信器RU4は呼掛け信号7を送り、ターゲット5のトランスポンダからの応答8を要求する。送受信器RU4は、ターゲットの範囲を計算する際に使用するために呼掛け信号7の送信時間を記録する。ターゲット内のトランスポンダは、上述したように許容範囲の既知の時間内で自動的に応答する。返信信号はRU4,6,6,6によって受信され、データが解読され、TOA装置2からの到達時間(TOA)が追加される。次に、各RUは、更なる評価のためにタイムスタンプを含むデータを、データリンクを介して処理装置3に送信する。また、送受信器RU4は呼掛け信号7の送信時間を、データリンクを介して処理装置3に送信する。
【0125】
処理装置は解読データをクラスタ化し、各クラスタは所定のターゲットから各RUが受信した所定の送信情報を含む。クラスタ化は、ターゲット番号識別、モードSアドレスまたはモード3/Aコードによって通常行うが、その他の証明された方法も利用することができる。以下に詳細に説明するように、処理装置はRUから供給されたターゲットデータと呼掛け信号の記録送信時間を利用して計算を行い、ターゲットの正確な位置を決定する。
【0126】
次の工程は、ターゲットの距離を推定位置計算に使用することができるか否かを決定することである。距離閾値チェックは、上述したようにターゲットのトランスポンダの処理時間のばらつきのために行われる。本実施形態に従ってRTDデータから計算された範囲を使用してターゲットの三次元位置を決定するために、信号を受信したRUの座標、測定TOA、計算された距離、距離測定RUを、本発明の三次元クローズド距離支援アルゴリズムに入力する。三次元クローズド距離支援アルゴリズムは、デカルト座標系のターゲットの推定位置をx,y,zデータとして与え、以下の説明から明らかになるように二次元クローズド距離支援アルゴリズムと類似している。
【0127】
アルゴリズムは最初にRU座標と関連TOAを求め、距離測定RUとしてアルゴリズム内のRU1を設定する。次に、推定位置を計算するために使用される到達時間差(TDOA)を計算するために、その他のRUからのTOAをRU1のTOAから減算する。次に、RU1がデカルト座標系の原点に存在するようにRUの座標を変換し、他のRUから新しい原点(RU1)までの距離を計算する。RUの位置の値の行列を作成し、TDOAとRU距離を結合する新しいベクトルを計算し、推定位置が直接得られる。この時点での推定位置はRU1を原点とするデカルト座標系にあり、x,y,zでのターゲットの最終推定位置を得るためには系中心を原点とする元のデカルト座標系に変換し直すことが必要である。
【0128】
三次元クローズド距離支援アルゴリズムからの推定位置は、三次元MLE(最尤推定位置)距離支援アルゴリズムによってさらに精度を向上させる。三次元MLE距離支援アルゴリズムは、入力として、ターゲットの初期推定位置、RUの座標、関連する測定TOA、距離測定値、距離測定RU(RU1)を必要とする。三次元MLE距離支援アルゴリズムは、連続的に新しい推定位置を推定し、新しい推定位置に対応する予測TOAを計算する反復解法である。三次元MLE距離支援アルゴリズムは、計算TOAと測定TOAとの間の誤差を測定するコスト関数をさらに含む。推定位置計算の場合には、コスト関数は、推定位置に対応する予測TOAと測定TOAとの間の標準になるように定義され、さらに詳しく後述するように距離測定値が含まれる。ニュートン−ラフソン法や滑降シンプレックス法等の他の検索評価方法を使用しても同様の精度の結果を得ることができる。
【0129】
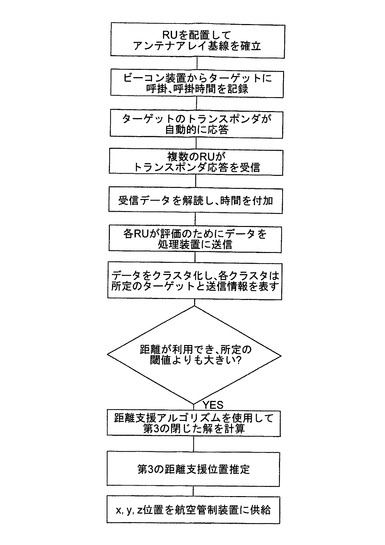
図12は、本実施形態に係る工程のフロー図である。第1の工程は、好ましくは空港の領域内に最低で4つのアンテナ素子(RU)を配置することである。アンテナ素子の少なくとも1つは信号を送受信することができなければならず(送受信RU)、その他のアンテナ素子は受信専用RUであってもよい。
【0130】
送受信RUは呼掛け信号をターゲットに送信し、送信時間を記録する。ターゲットのトランスポンダは、既知のデータ(例えば、モードSアドレス、航空機ID、高度など)を含む返信信号を送信する。呼掛け信号を送信した送受信RUと見通し線または多重通路の問題にさらされていない少なくとも3つの他のRUが応答を受信する。受信データは解読され、TOA情報が付加される。受信データ、TOA、記録された呼掛け信号の送信時間は処理装置3に送信される。処理装置3は、クラスタが複数のRUによって受信された同一のターゲットによる1回の送信からの情報を含むようにターゲットデータをクラスタ化する。
【0131】
三次元位置を計算するために、RTDデータから計算された距離を推定位置の精度を向上させるために利用するか否かについて決定する。距離を計算に利用すると決定した場合には、本発明の三次元クローズド距離支援アルゴリズムを使用して三次元推定位置を計算する。三次元推定位置は、三次元MLE距離支援アルゴリズムによってさらに向上させる。
【0132】
以下、三次元距離支援アルゴリズムについて詳細に説明する。
【0133】
三次元クローズド距離支援アルゴリズム
三次元クローズド距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・測定距離(R)
・距離測定RU(RUr)
三次元クローズド距離支援アルゴリズムの出力は、ターゲットの推定位置である。
【0134】
第1の工程は、アルゴリズムにおいて距離を測定したRUがRU1となるようにRU座標と関連TOAを求めることである。次の工程は、第1のTOA(RU1からのTOA)を使用してTDOAを計算することである。
【0135】
【数30】
【0136】
次に、RU1が原点となるようにRU座標を変換する。
【0137】
【数31】
【0138】
次に、変換した座標系におけるRUから原点までの距離を計算する。
【0139】
【数32】
【0140】
次に、RU座標値の行列を作成する。
【0141】
【数33】
【0142】
なお、行列の成分は後にAijと言及し、(i,j)は行と列である。
【0143】
次に、TDOAとRU距離を結合する新しいベクトルを作成する。
【0144】
【数34】
【0145】
そして、ターゲットの三次元推定位置を計算する。
【0146】
【数35】
【0147】
RUの座標はプロセスの開始時にRU1が原点となるように変換している。従って、最終推定位置を得るために推定位置を元の座標系に変換することが必要である。
【0148】
【数36】
【0149】
三次元クローズド距離支援アルゴリズムの出力はターゲットの推定位置(xi,yi,zi)である。
【0150】
三次元MLE距離支援アルゴリズム
三次元MLE距離支援アルゴリズムの入力は以下の通りである。
・RU座標
・測定TOA
・初期推定位置(xi,yi,zi)
・距離測定値(Rm)
・距離測定RU
三次元MLE距離支援アルゴリズムの出力は、x,y,zで表されるターゲットの正確な位置である。
【0151】
三次元クローズド距離支援アルゴリズムと同様に、第1の工程は、アルゴリズムにおいて距離を測定したRUがRU1となるようにRUを求めることである。三次元MLE距離支援アルゴリズムは、最初に初期推測(xi,yi,zi推定位置)を必要とし、連続的に新しい推定位置を推定する反復解法である。予測TOAは新しい推定位置について計算し、三次元MLE距離支援アルゴリズムのコスト関数は、計算TOAと測定TOAとの間の誤差を測定する。最終位置の計算の場合には、コスト関数は、現在の推定位置(xi,yi,zi)から導かれた予測TOAと測定TOAとの差の標準になるように定義される。ターゲットの最終計算位置の精度を向上させるために距離が含まれる。三次元MLE距離支援アルゴリズムは、コスト関数が所定の最小値以下の値を返すために推定値が十分に近くなるまで反復される。
【0152】
【数37】
【0153】
MLEは、関数fが最小となるまで推定値(xi,yi,zi)を変化させる。
【0154】
上述したように、本発明は、高価なレーダー装置を有しないか、購入する余裕のない空港にとって特に有益である。また、本発明は、装置の境界の外部に配置されるアンテナまたはRUを追加することなく、現在の航空管制装置の有効範囲を大きく拡大させるために使用することができる。
【0155】
以上、図面と図面に含まれる表を参照して本発明を説明したが、当業者は請求項によって定義される本発明の範囲から逸脱しない限りにおいて様々な詳細な変更を加えることができることを理解されるだろう。
【図面の簡単な説明】
【0156】
【図1】空港における典型的な受信装置(RU)の配置を示す。
【図2】RU、TOA装置、処理装置の典型的な接続を示す。
【図3】本発明の2つの実施形態に係る往復遅延法を使用してTOAデータを供給し距離を計算する信号の流れを示す。
【図4】異なるRUを距離を決定するための送受信機能に利用する場合の本発明の別の実施形態に係る信号の流れを示す。
【図5】本発明の好ましい実施形態に係るターゲットの正確な位置を決定するために利用される検索機能を示す。
【図6】検索の結果を示すグラフである。
【図7】本発明の一実施形態に係るターゲット位置を決定するために使用する方法のフロー図である。
【図8】本発明の一実施形態に係るアルゴリズムを説明するために使用するモデルの二次元図である。
【図9】本発明の一実施形態に係るアルゴリズムをさらに発展させるために使用するモデルの三次元図である。
【図10】本発明の別の実施形態に係るターゲット位置を決定するために使用する別の方法のフロー図である。
【図11】本発明の別の実施形態に係る往復遅延法を使用してTOAデータを供給し距離を計算する信号の流れを示す。
【図12】本発明の別の実施形態に係るターゲット位置を決定するために使用する別の方法のフロー図である。
【特許請求の範囲】
【請求項1】
ターゲットの位置を特定するための方法であって、
送信器からターゲットに信号を送信する工程と、
前記ターゲットからの返信信号を少なくとも1つの受信器を使用して受信する工程と、
前記送信器から前記ターゲット、前記ターゲットから前記少なくとも1つの受信器までの往復遅延(RTD)を計算する工程と、
少なくとも3つの受信器を使用して前記ターゲットからの信号を受信する工程と、
各受信器における前記信号の到達時間(TOA)を決定する工程と、
各受信器からの前記TOAを使用して、測定された到達時間差(測定TDOA)を計算する工程と、
前記測定TDOAと前記RTDのデータを使用して前記ターゲットの少なくとも推定位置を計算する工程と、
を含むことを特徴とするターゲット位置特定方法。
【請求項2】
請求項1において、
前記ターゲットの少なくとも推定位置を計算する工程は、
前記測定TDOAのデータを使用して前記ターゲットの初期方位角を計算する工程と、
前記初期方位角と前記RTDのデータを使用して前記ターゲットの少なくともほぼ正確な平面位置を計算する工程と、
を含むことを特徴とするターゲット位置特定方法。
【請求項3】
請求項2において、前記ターゲットからの前記返信信号の高度データから高度を計算し、前記高度と組み合わせられた前記初期方位角と前記RTDデータを前記ターゲットのほぼ正確な三次元位置を計算するために使用することを特徴とするターゲット位置特定方法。
【請求項4】
請求項2において、前記信号の送信と受信を同一のアンテナを介して行い、前記RTDデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定方法。
【請求項5】
請求項4において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定方法。
【請求項6】
請求項1において、前記少なくとも3つの受信器によって受信される前記信号が前記返信信号であることを特徴とするターゲット位置特定方法。
【請求項7】
請求項2において、前記少なくとも3つの受信器によって受信される前記信号が前記返信信号であることを特徴とするターゲット位置特定方法。
【請求項8】
請求項4において、
前記初期方位角と前記RTDのデータを使用して前記ターゲットが位置する円弧を定義する工程と、
前記円弧に沿って所定数の点を選択する工程と、
各点について予測TDOAを計算する工程と、
各点の前記予測TDOAを前記測定TDOAと比較して各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定する工程と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのより正確な方位角として選択する工程と、
前記より正確な方位角と前記RTDのデータを使用して前記ターゲットのより正確な平面位置を計算する工程と、
をさらに含むことを特徴とするターゲット位置特定方法。
【請求項9】
請求項8において、前記円弧に沿って設けられた各点が同一のRTDを有することを特徴とするターゲット位置特定方法。
【請求項10】
請求項8において、前記送信器と前記受信器がアレイ基線を有するアレイに配置され、前記円弧の長さが前記アレイ基線の長さの約2倍であることを特徴とするターゲット位置特定方法。
【請求項11】
請求項8において、
前記より正確な方位角と前記RTDのデータを使用して前記円弧のセグメントを定義する工程と、
前記円弧の前記セグメントに沿って第2群の所定数の点を選択する工程と、
前記第2群の各点について予測TDOAを計算する工程と、
前記第2群の各点の前記予測TDOAを前記測定TDOAと比較して前記第2群の各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定する工程と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのさらに正確な方位角として選択する工程と、
前記さらに正確な方位角と前記RTDのデータを使用して前記ターゲットのさらに正確な平面位置を計算する工程と、
をさらに含むことを特徴とするターゲット位置特定方法。
【請求項12】
ターゲットの位置を特定するための装置であって、
ターゲットに信号を送信するための少なくとも1つの送信器と、
前記ターゲットからの返信信号を受信するための少なくとも1つの受信器と、
前記送信器から前記ターゲット、前記ターゲットから前記少なくとも1つの受信器までの往復遅延(RTD)を計算する装置と、
前記ターゲットからの信号を受信するための少なくとも3つの受信器と、
各受信器における前記信号の到達時間(TOA)を決定するための装置と、
各受信器からの前記TOAを使用して、測定された到達時間差(測定TDOA)を計算するための装置と、
前記測定TDOAのデータを使用して前記ターゲットの初期方位角を計算するための装置と、
前記初期方位角と前記RTDのデータを使用して前記ターゲットの少なくともほぼ正確な平面位置を計算するための装置と、
を含むことを特徴とするターゲット位置特定装置。
【請求項13】
請求項12において、前記ターゲットからの前記返信信号の高度データから高度を計算し、前記高度と組み合わせられた前記初期方位角と前記RTDのデータを前記ターゲットのほぼ正確な三次元位置を計算するために使用することを特徴とするターゲット位置特定装置。
【請求項14】
請求項12において、前記信号の送信と受信を同一のアンテナを介して行い、前記RTDのデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定装置。
【請求項15】
請求項14において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定装置。
【請求項16】
請求項14において、
前記初期方位角と前記RTDのデータを使用して前記ターゲットが位置する円弧を定義するための装置と、
前記円弧に沿って所定数の点を選択するための装置と、
各点について予測TDOAを計算するための装置と、
各点の前記予測TDOAを前記測定TDOAと比較して各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定するための装置と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのより正確な方位角として選択するための装置と、
前記より正確な方位角と前記RTDのデータを使用して前記ターゲットのより正確な平面位置を計算するための装置と、
をさらに含むことを特徴とするターゲット位置特定装置。
【請求項17】
請求項16において、前記円弧に沿って選択された前記点が同一のRTDを有することを特徴とするターゲット位置特定装置。
【請求項18】
請求項16において、前記送信器と前記受信器がアレイ基線を有するアレイに配置され、前記円弧の長さが前記アレイ基線の長さの約2倍であることを特徴とするターゲット位置特定方法。
【請求項19】
請求項16において、
前記より正確な方位角と前記RTDのデータを使用して前記円弧のセグメントを定義するための装置と、
前記円弧の前記セグメントに沿って第2群の所定数の点を選択するための装置と、
前記第2群の各点について予測TDOAを計算するための装置と、
前記第2群の各点の前記予測TDOAを前記測定TDOAと比較して前記第2群の各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定するための装置と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのさらに正確な方位角として選択するための装置と、
前記さらに正確な方位角と前記RTDのデータを使用して前記ターゲットのさらに正確な平面位置を計算するための装置と、
をさらに含むことを特徴とするターゲット位置特定装置。
【請求項20】
請求項1において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定方法。
【請求項21】
請求項1において、前記少なくとも3つの受信器によって受信される前記信号が前記返信信号であることを特徴とするターゲット位置特定方法。
【請求項22】
請求項1において、前記信号の送信と受信を同一の同じアンテナを介して行い、前記RTDのデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定方法。
【請求項23】
請求項1において、前記推定位置と、前記受信器の座標と、前記TOAと、前記RTDのデータとを前記ターゲットのより正確な位置を計算するために使用することを特徴とするターゲット位置特定方法。
【請求項24】
請求項23において、前記より正確な位置を、a)新しいターゲット位置を推定する工程と、b)前記新しいターゲット位置に対応するTOAを計算する工程と、c)前記計算TOAと前記測定TOAとの誤差を測定する工程と、d)最小誤差を有する予測TOAに関連付けられた前記推定位置を選択する工程と、によって計算することを特徴とするターゲット位置特定方法。
【請求項25】
請求項24において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すことを特徴とするターゲット位置特定方法。
【請求項26】
請求項24において、前記より正確な位置を最尤位置推定アルゴリズムを使用して計算することを特徴とするターゲット位置特定方法。
【請求項27】
請求項26において、前記最尤位置推定アルゴリズムがニュートン−ラフソン法であることを特徴とするターゲット位置特定方法。
【請求項28】
請求項26において、前記最尤位置推定アルゴリズムが滑降シンプレックス法であることを特徴とするターゲット位置特定方法。
【請求項29】
請求項1において、前記ターゲットの高度が既知であり、前記高度を前記TDOA及び前記RTDのデータと組み合わせて前記ターゲットの推定位置を計算することを特徴とするターゲット位置特定方法。
【請求項30】
請求項29において、前記高度を前記ターゲットからの前記返信信号に含まれる高度データから計算することを特徴とするターゲット位置特定方法。
【請求項31】
請求項29において、前記高度が、前記ターゲットが地上に位置するという判断から既知であることを特徴とするターゲット位置特定方法。
【請求項32】
請求項29において、前記推定位置と、前記受信器の座標と、前記TOAと、前記ターゲットの高度と、前記RTDのデータとを前記ターゲットのより正確な位置を計算するために使用することを特徴とするターゲット位置特定方法。
【請求項33】
請求項32において、前記より正確な位置を、a)新しいターゲット位置を推定する工程と、b)前記新しいターゲット位置に対応するTOAを計算する工程と、c)前記計算TOAと前記測定TOAとの誤差を測定する工程と、d)最小誤差を有する予測TOAに関連付けられた前記推定位置を前記ターゲットの新しい推定位置として選択する工程と、によって計算することを特徴とするターゲット位置特定方法。
【請求項34】
請求項33において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すことを特徴とするターゲット位置特定方法。
【請求項35】
請求項33において、前記より正確な位置を最尤位置推定アルゴリズムを使用して計算することを特徴とするターゲット位置特定方法。
【請求項36】
請求項35において、前記最尤位置推定アルゴリズムがニュートン−ラフソン法であることを特徴とするターゲット位置特定方法。
【請求項37】
請求項35において、前記最尤位置推定アルゴリズムが滑降シンプレックス法であることを特徴とするターゲット位置特定方法。
【請求項38】
ターゲットの位置を特定するための装置であって、
ターゲットに信号を送信するための少なくとも1つの送信器と、
前記ターゲットからの返信信号を受信するための少なくとも1つの受信器と、
前記送信器から前記ターゲット、前記ターゲットから前記少なくとも1つの受信器までの往復遅延(RTD)を計算するための装置と、
前記ターゲットからの信号を受信するための少なくとも3つの受信器と、
各受信器における前記信号の到達時間(TOA)を決定するための装置と、
各受信器からの前記TOAを使用して、測定された到達時間差(測定TDOA)を計算するための装置と、
前記TDOAデータと前記RTDのデータを使用して前記ターゲットの少なくとも推定位置を計算するための装置と、
を含むことを特徴とするターゲット位置特定装置。
【請求項39】
請求項38において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定装置。
【請求項40】
請求項38において、前記信号の送信と受信を同一のアンテナを介して行い、前記RTDのデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定方法。
【請求項41】
請求項38において、前記推定位置と、前記受信器の座標と、前記TOAと、前記RTDのデータとを使用して前記ターゲットのより正確な位置を計算するための装置を含むことを特徴とするターゲット位置特定装置。
【請求項42】
請求項41において、a)新しいターゲット位置を推定し、b)前記新しいターゲット位置に対応するTOAを計算し、c)前記計算TOAと前記測定TOAとの誤差を測定し、d)最小誤差を有する前記予測TOAに関連付けられた前記推定位置を選択するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項43】
請求項42において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すための装置をさらに含むことを特徴とするターゲット位置特定方法。
【請求項44】
請求項38において、前記ターゲットの高度を決定するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項45】
請求項44において、前記高度を前記ターゲットからの前記返信信号に含まれる高度データから計算することを特徴とするターゲット位置特定装置。
【請求項46】
請求項44において、前記ターゲットが地上に位置するということを決定するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項47】
請求項44において、前記TDOAと、前記ターゲットの高度と、前記RTDのデータとを使用して前記ターゲットの推定位置を計算するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項48】
請求項47において、前記推定位置と、前記受信器の座標と、前記TOAと、前記ターゲットの高度と、前記RTDのデータとを使用して前記ターゲットのより正確な位置を計算するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項49】
請求項48において、a)新しいターゲット位置を推定し、b)前記新しいターゲット位置に対応するTOAを計算し、c)前記計算TOAと前記測定TOAとの誤差を測定し、d)最小誤差を有する前記予測TOAに関連付けられた前記推定位置を前記ターゲットの新しい推定位置として選択するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項50】
請求項49において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すための装置をさらに含むことを特徴とするターゲット位置特定方法。
【請求項1】
ターゲットの位置を特定するための方法であって、
送信器からターゲットに信号を送信する工程と、
前記ターゲットからの返信信号を少なくとも1つの受信器を使用して受信する工程と、
前記送信器から前記ターゲット、前記ターゲットから前記少なくとも1つの受信器までの往復遅延(RTD)を計算する工程と、
少なくとも3つの受信器を使用して前記ターゲットからの信号を受信する工程と、
各受信器における前記信号の到達時間(TOA)を決定する工程と、
各受信器からの前記TOAを使用して、測定された到達時間差(測定TDOA)を計算する工程と、
前記測定TDOAと前記RTDのデータを使用して前記ターゲットの少なくとも推定位置を計算する工程と、
を含むことを特徴とするターゲット位置特定方法。
【請求項2】
請求項1において、
前記ターゲットの少なくとも推定位置を計算する工程は、
前記測定TDOAのデータを使用して前記ターゲットの初期方位角を計算する工程と、
前記初期方位角と前記RTDのデータを使用して前記ターゲットの少なくともほぼ正確な平面位置を計算する工程と、
を含むことを特徴とするターゲット位置特定方法。
【請求項3】
請求項2において、前記ターゲットからの前記返信信号の高度データから高度を計算し、前記高度と組み合わせられた前記初期方位角と前記RTDデータを前記ターゲットのほぼ正確な三次元位置を計算するために使用することを特徴とするターゲット位置特定方法。
【請求項4】
請求項2において、前記信号の送信と受信を同一のアンテナを介して行い、前記RTDデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定方法。
【請求項5】
請求項4において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定方法。
【請求項6】
請求項1において、前記少なくとも3つの受信器によって受信される前記信号が前記返信信号であることを特徴とするターゲット位置特定方法。
【請求項7】
請求項2において、前記少なくとも3つの受信器によって受信される前記信号が前記返信信号であることを特徴とするターゲット位置特定方法。
【請求項8】
請求項4において、
前記初期方位角と前記RTDのデータを使用して前記ターゲットが位置する円弧を定義する工程と、
前記円弧に沿って所定数の点を選択する工程と、
各点について予測TDOAを計算する工程と、
各点の前記予測TDOAを前記測定TDOAと比較して各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定する工程と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのより正確な方位角として選択する工程と、
前記より正確な方位角と前記RTDのデータを使用して前記ターゲットのより正確な平面位置を計算する工程と、
をさらに含むことを特徴とするターゲット位置特定方法。
【請求項9】
請求項8において、前記円弧に沿って設けられた各点が同一のRTDを有することを特徴とするターゲット位置特定方法。
【請求項10】
請求項8において、前記送信器と前記受信器がアレイ基線を有するアレイに配置され、前記円弧の長さが前記アレイ基線の長さの約2倍であることを特徴とするターゲット位置特定方法。
【請求項11】
請求項8において、
前記より正確な方位角と前記RTDのデータを使用して前記円弧のセグメントを定義する工程と、
前記円弧の前記セグメントに沿って第2群の所定数の点を選択する工程と、
前記第2群の各点について予測TDOAを計算する工程と、
前記第2群の各点の前記予測TDOAを前記測定TDOAと比較して前記第2群の各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定する工程と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのさらに正確な方位角として選択する工程と、
前記さらに正確な方位角と前記RTDのデータを使用して前記ターゲットのさらに正確な平面位置を計算する工程と、
をさらに含むことを特徴とするターゲット位置特定方法。
【請求項12】
ターゲットの位置を特定するための装置であって、
ターゲットに信号を送信するための少なくとも1つの送信器と、
前記ターゲットからの返信信号を受信するための少なくとも1つの受信器と、
前記送信器から前記ターゲット、前記ターゲットから前記少なくとも1つの受信器までの往復遅延(RTD)を計算する装置と、
前記ターゲットからの信号を受信するための少なくとも3つの受信器と、
各受信器における前記信号の到達時間(TOA)を決定するための装置と、
各受信器からの前記TOAを使用して、測定された到達時間差(測定TDOA)を計算するための装置と、
前記測定TDOAのデータを使用して前記ターゲットの初期方位角を計算するための装置と、
前記初期方位角と前記RTDのデータを使用して前記ターゲットの少なくともほぼ正確な平面位置を計算するための装置と、
を含むことを特徴とするターゲット位置特定装置。
【請求項13】
請求項12において、前記ターゲットからの前記返信信号の高度データから高度を計算し、前記高度と組み合わせられた前記初期方位角と前記RTDのデータを前記ターゲットのほぼ正確な三次元位置を計算するために使用することを特徴とするターゲット位置特定装置。
【請求項14】
請求項12において、前記信号の送信と受信を同一のアンテナを介して行い、前記RTDのデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定装置。
【請求項15】
請求項14において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定装置。
【請求項16】
請求項14において、
前記初期方位角と前記RTDのデータを使用して前記ターゲットが位置する円弧を定義するための装置と、
前記円弧に沿って所定数の点を選択するための装置と、
各点について予測TDOAを計算するための装置と、
各点の前記予測TDOAを前記測定TDOAと比較して各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定するための装置と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのより正確な方位角として選択するための装置と、
前記より正確な方位角と前記RTDのデータを使用して前記ターゲットのより正確な平面位置を計算するための装置と、
をさらに含むことを特徴とするターゲット位置特定装置。
【請求項17】
請求項16において、前記円弧に沿って選択された前記点が同一のRTDを有することを特徴とするターゲット位置特定装置。
【請求項18】
請求項16において、前記送信器と前記受信器がアレイ基線を有するアレイに配置され、前記円弧の長さが前記アレイ基線の長さの約2倍であることを特徴とするターゲット位置特定方法。
【請求項19】
請求項16において、
前記より正確な方位角と前記RTDのデータを使用して前記円弧のセグメントを定義するための装置と、
前記円弧の前記セグメントに沿って第2群の所定数の点を選択するための装置と、
前記第2群の各点について予測TDOAを計算するための装置と、
前記第2群の各点の前記予測TDOAを前記測定TDOAと比較して前記第2群の各点の前記予測TDOAと前記測定TDOAとの最小誤差を決定するための装置と、
前記最小誤差を有する前記予測TDOAに関連付けられた方位角を前記ターゲットのさらに正確な方位角として選択するための装置と、
前記さらに正確な方位角と前記RTDのデータを使用して前記ターゲットのさらに正確な平面位置を計算するための装置と、
をさらに含むことを特徴とするターゲット位置特定装置。
【請求項20】
請求項1において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定方法。
【請求項21】
請求項1において、前記少なくとも3つの受信器によって受信される前記信号が前記返信信号であることを特徴とするターゲット位置特定方法。
【請求項22】
請求項1において、前記信号の送信と受信を同一の同じアンテナを介して行い、前記RTDのデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定方法。
【請求項23】
請求項1において、前記推定位置と、前記受信器の座標と、前記TOAと、前記RTDのデータとを前記ターゲットのより正確な位置を計算するために使用することを特徴とするターゲット位置特定方法。
【請求項24】
請求項23において、前記より正確な位置を、a)新しいターゲット位置を推定する工程と、b)前記新しいターゲット位置に対応するTOAを計算する工程と、c)前記計算TOAと前記測定TOAとの誤差を測定する工程と、d)最小誤差を有する予測TOAに関連付けられた前記推定位置を選択する工程と、によって計算することを特徴とするターゲット位置特定方法。
【請求項25】
請求項24において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すことを特徴とするターゲット位置特定方法。
【請求項26】
請求項24において、前記より正確な位置を最尤位置推定アルゴリズムを使用して計算することを特徴とするターゲット位置特定方法。
【請求項27】
請求項26において、前記最尤位置推定アルゴリズムがニュートン−ラフソン法であることを特徴とするターゲット位置特定方法。
【請求項28】
請求項26において、前記最尤位置推定アルゴリズムが滑降シンプレックス法であることを特徴とするターゲット位置特定方法。
【請求項29】
請求項1において、前記ターゲットの高度が既知であり、前記高度を前記TDOA及び前記RTDのデータと組み合わせて前記ターゲットの推定位置を計算することを特徴とするターゲット位置特定方法。
【請求項30】
請求項29において、前記高度を前記ターゲットからの前記返信信号に含まれる高度データから計算することを特徴とするターゲット位置特定方法。
【請求項31】
請求項29において、前記高度が、前記ターゲットが地上に位置するという判断から既知であることを特徴とするターゲット位置特定方法。
【請求項32】
請求項29において、前記推定位置と、前記受信器の座標と、前記TOAと、前記ターゲットの高度と、前記RTDのデータとを前記ターゲットのより正確な位置を計算するために使用することを特徴とするターゲット位置特定方法。
【請求項33】
請求項32において、前記より正確な位置を、a)新しいターゲット位置を推定する工程と、b)前記新しいターゲット位置に対応するTOAを計算する工程と、c)前記計算TOAと前記測定TOAとの誤差を測定する工程と、d)最小誤差を有する予測TOAに関連付けられた前記推定位置を前記ターゲットの新しい推定位置として選択する工程と、によって計算することを特徴とするターゲット位置特定方法。
【請求項34】
請求項33において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すことを特徴とするターゲット位置特定方法。
【請求項35】
請求項33において、前記より正確な位置を最尤位置推定アルゴリズムを使用して計算することを特徴とするターゲット位置特定方法。
【請求項36】
請求項35において、前記最尤位置推定アルゴリズムがニュートン−ラフソン法であることを特徴とするターゲット位置特定方法。
【請求項37】
請求項35において、前記最尤位置推定アルゴリズムが滑降シンプレックス法であることを特徴とするターゲット位置特定方法。
【請求項38】
ターゲットの位置を特定するための装置であって、
ターゲットに信号を送信するための少なくとも1つの送信器と、
前記ターゲットからの返信信号を受信するための少なくとも1つの受信器と、
前記送信器から前記ターゲット、前記ターゲットから前記少なくとも1つの受信器までの往復遅延(RTD)を計算するための装置と、
前記ターゲットからの信号を受信するための少なくとも3つの受信器と、
各受信器における前記信号の到達時間(TOA)を決定するための装置と、
各受信器からの前記TOAを使用して、測定された到達時間差(測定TDOA)を計算するための装置と、
前記TDOAデータと前記RTDのデータを使用して前記ターゲットの少なくとも推定位置を計算するための装置と、
を含むことを特徴とするターゲット位置特定装置。
【請求項39】
請求項38において、前記少なくとも1つの受信器が前記少なくとも3つの受信器の1つとしても機能することを特徴とするターゲット位置特定装置。
【請求項40】
請求項38において、前記信号の送信と受信を同一のアンテナを介して行い、前記RTDのデータが前記ターゲットの前記送信器からの距離を示すことを特徴とするターゲット位置特定方法。
【請求項41】
請求項38において、前記推定位置と、前記受信器の座標と、前記TOAと、前記RTDのデータとを使用して前記ターゲットのより正確な位置を計算するための装置を含むことを特徴とするターゲット位置特定装置。
【請求項42】
請求項41において、a)新しいターゲット位置を推定し、b)前記新しいターゲット位置に対応するTOAを計算し、c)前記計算TOAと前記測定TOAとの誤差を測定し、d)最小誤差を有する前記予測TOAに関連付けられた前記推定位置を選択するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項43】
請求項42において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すための装置をさらに含むことを特徴とするターゲット位置特定方法。
【請求項44】
請求項38において、前記ターゲットの高度を決定するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項45】
請求項44において、前記高度を前記ターゲットからの前記返信信号に含まれる高度データから計算することを特徴とするターゲット位置特定装置。
【請求項46】
請求項44において、前記ターゲットが地上に位置するということを決定するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項47】
請求項44において、前記TDOAと、前記ターゲットの高度と、前記RTDのデータとを使用して前記ターゲットの推定位置を計算するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項48】
請求項47において、前記推定位置と、前記受信器の座標と、前記TOAと、前記ターゲットの高度と、前記RTDのデータとを使用して前記ターゲットのより正確な位置を計算するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項49】
請求項48において、a)新しいターゲット位置を推定し、b)前記新しいターゲット位置に対応するTOAを計算し、c)前記計算TOAと前記測定TOAとの誤差を測定し、d)最小誤差を有する前記予測TOAに関連付けられた前記推定位置を前記ターゲットの新しい推定位置として選択するための装置をさらに含むことを特徴とするターゲット位置特定装置。
【請求項50】
請求項49において、前記計算TOAと前記測定TOAとの差が少なくとも所定の値以下となるまで前記工程a〜dを繰り返すための装置をさらに含むことを特徴とするターゲット位置特定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2007−502414(P2007−502414A)
【公表日】平成19年2月8日(2007.2.8)
【国際特許分類】
【出願番号】特願2006−523261(P2006−523261)
【出願日】平成16年8月9日(2004.8.9)
【国際出願番号】PCT/US2004/025629
【国際公開番号】WO2005/017555
【国際公開日】平成17年2月24日(2005.2.24)
【出願人】(506049806)センシス コーポレーション (1)
【氏名又は名称原語表記】Sensis Corporation
【住所又は居所原語表記】85 Collamer Crossings, East Syracuse, New York 13057 U.S.A.
【Fターム(参考)】
【公表日】平成19年2月8日(2007.2.8)
【国際特許分類】
【出願日】平成16年8月9日(2004.8.9)
【国際出願番号】PCT/US2004/025629
【国際公開番号】WO2005/017555
【国際公開日】平成17年2月24日(2005.2.24)
【出願人】(506049806)センシス コーポレーション (1)
【氏名又は名称原語表記】Sensis Corporation
【住所又は居所原語表記】85 Collamer Crossings, East Syracuse, New York 13057 U.S.A.
【Fターム(参考)】
[ Back to top ]