
X線コンピュータ断層撮影装置およびブラシ交換タイミング出力方法
【課題】X線コンピュータ断層撮影装置におけるブラシの交換時期を検知すること。
【解決手段】本実施形態に係るX線コンピュータ断層撮影装置は、X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、回転フレームを回転駆動させる駆動部と、回転フレームに設けられたスリップリングとスリップリングに接触するブラシとを有するスリップリング機構と、駆動部により発生された回転フレームの回転トルクに基づいて、ブラシとスリップリングとの接触による抵抗値を計算する計算部と、計算された抵抗値が所定の値に到達したとき、所定の警告を出力する警告出力部と、を具備することを特徴とする。
【解決手段】本実施形態に係るX線コンピュータ断層撮影装置は、X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、回転フレームを回転駆動させる駆動部と、回転フレームに設けられたスリップリングとスリップリングに接触するブラシとを有するスリップリング機構と、駆動部により発生された回転フレームの回転トルクに基づいて、ブラシとスリップリングとの接触による抵抗値を計算する計算部と、計算された抵抗値が所定の値に到達したとき、所定の警告を出力する警告出力部と、を具備することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、スリップリング機構を有するX線コンピュータ断層撮影装置に関する。
【背景技術】
【0002】
従来、X線コンピュータ断層撮影装置は、回転部に電力を供給するために、回転部にスリップリングが設けられ、固定部にブラシが設けられている。スリップリングとブラシとを接触させることにより、回転部に電力が供給される。X線コンピュータ断層撮影装置の継続使用により、ブラシは摩耗する。ブラシが摩耗すると、回転部への電力伝達効率が低減する。加えて、ブラシの摩耗は、ブラシとスリップリングとの間に間隙を生じさせることがある。間隙は、放電を発生させることがある。これらにより、回転部における例えばX線管への電力の安定供給が損なわれることがある。X線管への電力の安定供給が損なわれると、X線強度の変動が発生する場合がある。X線強度の変動は、アーチファクトを発生させることがある。
【0003】
従来、ブラシの摩耗に関する点検及び交換は、定期的に実行されている。また、ブラシの摩耗具合(以下、摩耗度と呼ぶ)に関する点検は、メンテナンス従事者の目視により実行されている。摩耗度は、X線コンピュータ断層撮影装置の稼働条件および使用状況により変化する。このため、定期的な点検では、想定以上のブラシの摩耗を検知できない問題がある。加えて、ブラシの摩耗がほとんど発生していないにもかかわらず、定期的な点検作業の実施の実施は、作業効率および費用対効果が悪い問題がある。以上のことから、ブラシの交換などのメンテナンスを適切なタイミングで実行する必要があるにもかかわらず、このタイミングを検知できない問題がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的は、X線コンピュータ断層撮影装置におけるブラシの交換時期を検知することにある。
【課題を解決するための手段】
【0005】
本実施形態に係るX線コンピュータ断層撮影装置は、X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、前記回転フレームを回転駆動させる駆動部と、前記回転フレームに設けられたスリップリングと前記スリップリングに接触するブラシとを有するスリップリング機構と、前記駆動部により発生された前記回転フレームの回転トルクに基づいて、前記ブラシと前記スリップリングとの接触による抵抗値を計算する計算部と、前記計算された抵抗値が所定の値に到達したとき、所定の警告を出力する警告出力部と、を具備することを特徴とする。
【図面の簡単な説明】
【0006】
【図1】図1は、第1の実施形態に係るX線コンピュータ断層撮影装置の構成を示す図である。
【図2】図2は、第1の実施形態に係り、回転フレームの断面を、回転フレームに取り付けられたスリップリングとともに示す断面図である。
【図3】図3は、第1の実施形態に係り、ブラシ支持部を固定部に取り付けた一例を示す図である。
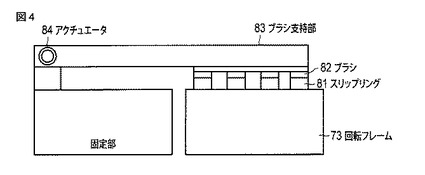
【図4】図4は、第1の実施形態に係り、スリップリングに接触されたブラシの断面の一例を示す図である。
【図5】図5は、第1の実施形態に係り、駆動部の構成の一例を、駆動部に関連する各部とともに示す図である。
【図6】図6は、第1の実施形態に係り、回転フレームの回転トルクに基づいて計算された摺動抵抗が所定の値に達したとき、所定の警告を表示させる処理の流れの一例を示す流れ図である。
【図7】図7は、第2の実施形態に係るX線コンピュータ断層撮影装置の構成の一例を示す図である。
【図8】図8は、第3の実施形態に係るX線コンピュータ断層撮影装置の構成の一例を示す図である。
【図9】図9は、第3の実施形態に係り、摺動抵抗Rに対する制御角度θの対応表の一例を、グラフで示した図である。
【図10】図10は、第3の実施形態に係り、回転フレームの回転トルクに基づいて抵抗値を計算し、ブラシ支持部を制御する処理の流れの一例を示す流れ図である。
【発明を実施するための形態】
【0007】
以下、X線コンピュータ断層撮影装置(Computed Tomography)の実施形態について図面を参照しながら説明する。なお、X線コンピュータ断層撮影装置には、X線管とX線検出器とが一体として被検体の周囲を回転するRotate/Rotate−Type、リング状にアレイされた多数のX線検出素子が固定され、X線管のみが被検体の周囲を回転するStationary/Rotate−Type等様々なタイプがあり、いずれのタイプでも本実施形態へ適用可能である。また、画像を再構成するには被検体の周囲一周、360°分の投影データが、またハーフスキャン法でも180°+ファン角度分の投影データが必要とされる。いずれの再構成方式に対しても本実施形態へ適用可能である。また、入射X線を電荷に変化するメカニズムは、シンチレータ等の蛍光体でX線を光に変換し更にその光をフォトダイオード等の光電変換素子で電荷に変換する間接変換形と、X線によるセレン等の半導体内での電子正孔対の生成及びその電極への移動すなわち光導電現象を利用した直接変換形とが主流である。X線検出素子としては、それらのいずれの方式を採用してもよい。さらに、近年では、X線管とX線検出器との複数のペアを回転リングに搭載したいわゆる多管球型のX線コンピュータ断層撮影装置の製品化が進み、その周辺技術の開発が進んでいる。本実施形態においては、従来からの一管球型のX線コンピュータ断層撮影装置であっても、多管球型のX線コンピュータ断層撮影装置であってもいずれも適用可能である。ここでは、一管球型として説明する。
【0008】
なお、以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0009】
(第1の実施形態)
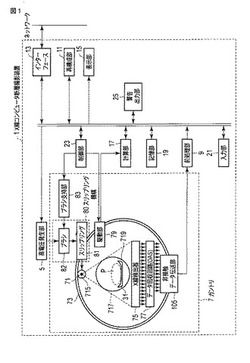
図1は、第1の実施形態に係るX線コンピュータ断層撮影装置の構成を示す図である。
第1の実施形態に係るX線コンピュータ断層撮影装置1は、高電圧発生部5、ガントリ7、前処理部9、再構成部11、インターフェース13、表示部15、計算部17、記憶部19、入力部21、制御部23、警告出力部25を有する。
【0010】
高電圧発生部5は、X線管71に供給するための高電圧を発生する。図1において、高電圧発生部5は、ガントリ7の外部に設けられている。なお、高電圧発生部5は、後述する回転フレーム73に搭載されてもよい。以下、説明の便宜上、高電圧発生部5は、ガントリ7の外部に設けられているものとする。
【0011】
ガントリ7には、回転支持機構が収容される。回転支持機構は、回転フレーム73と、回転軸Zを中心として回転自在に回転フレーム73を支持するフレーム支持機構と回転フレーム73の回転を駆動する駆動部79とを有する。回転フレーム73には、X線管71と、2次元アレイ型または多列型とも称されるエリア検出器(以下X線検出器75と呼ぶ)とが搭載される。X線検出器75は、撮影領域719を挟んでX線管71に対向する。X線管71は、スリップリング機構80を介して、高電圧発生部5に電気的に接続される。スリップリング機構80は、回転フレーム73に取り付けられたスリップリング81と、スリップリング81の外周の特定位置に配置されたブラシ82とを有する。スリップリング81は、リング状になった導電性のレールである。ブラシ82は、スリップリング81の表面に接触される導電性の摺動子である。図2は、回転フレーム73の断面をスリップリング81とともに示す図である。
【0012】
ブラシ82は、ブラシ支持部83により支持される。ブラシ支持部83は、図1に図示していないアクチュエータを有する。アクチュエータは、後述する制御部23による制御のもとで、スリップリング81からブラシ82を分離させるために、ブラシ支持部83を駆動させる。アクチュエータは、後述する制御23による制御のもとで、スリップリング81にブラシ82を接触させるために、ブラシ支持部83を駆動させる。上記アクチュエータによる駆動により、ブラシ支持部83は、スリップリング81に対してブラシを着脱可能に支持する。ブラシ支持部83は、ガントリ7内の図示していない固定部に設けられる。
【0013】
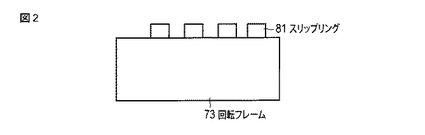
図3は、ブラシ支持部83を固定部に取り付けた一例を示す図である。図3に示すように、ブラシ支持部83は、アクチュエータ84により、駆動範囲(θ)で駆動される。ブラシ支持部83を駆動させることにより、ブラシ82は、所定の押圧力でスリップリング81に接触される。なお、ブラシ支持部83は、アクチュエータ84を介さずに直接的に固定部に設置されてもよい。このとき、ブラシ83は、スリップリング81に常時接触した状態となる。なお、ブラシ支持部83は、図3のように限定されるわけではない。例えば、アクチュエータ84の替わりに、スリップリング81とブラシ82とを対面させたままスリップリング81からブラシ82を分離させる機構(以下、対面分離機構と呼ぶ)が、ブラシ支持部83と固定部との間に設けられてもよい。図4は、スリップリングに接触されたブラシの一例を示す図である。なお、回転フレーム73にブラシ82が設けられ、固定部にスリップリング81が設けられてもよい。
【0014】
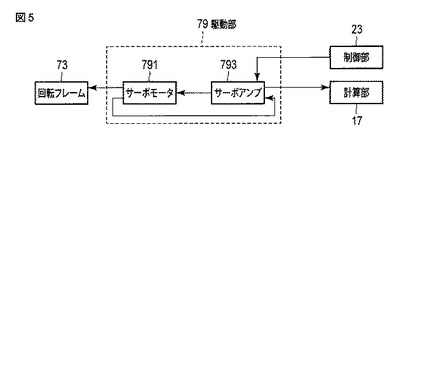
駆動部79は、後述する制御部23による制御の下で、ダイレクトドライブまたはベルトドライブにより、回転フレーム73を回転させる。図5は、駆動部79の構成の一例を、駆動部79に関連する各部とともに示す図である。駆動部79は、サーボモータ791とサーボアンプ793とを有する。サーボモータ791は、サーボアンプ793から供給された電流を用いて、回転フレーム73を回転させるための回転トルクを発生する。発生された回転トルクは、ダイレクトドライブまたはベルトドライブを介して、回転フレーム73に伝達される。この伝達により、サーボモータ791は、回転フレーム73を回転させる。サーボモータ791は、モータの回転数に比例したフィードバックパルスを、サーボアンプ793に出力する。
【0015】
サーボアンプ793は、後述する制御部23から出力された駆動指令と、サーボモータ791から出力されたフィードバックパルスとに基づいて、サーボモータ791に供給する電流を制御する。具体的には、サーボアンプ793は、駆動指令とフィードバックパルスとに基づいて、正弦波状の電流に関する大きさを、電気角に応じて変化させる。電流の大きさを変化させることにより、回転トルクは変化する。このようにして、サーボアンプ793は、サーボモータ791を制御する。サーボアンプ793は、サーボモータ791から出力されたフィードバックパルスに基づいて、回転フレーム73の回転トルクを、後述する計算部17に出力する。
【0016】
X線管71は、高電圧発生部5からスリップリング機構80を経由(ブラシ82とスリップリング81)して電圧の印加および電流の供給を受ける。X線管71は、電圧の印加および電流の供給を受けて、X線の焦点715からX線を放射する。X線の焦点715から放射されたX線は、X線管71のX線放射窓に取り付けられたコリメーターユニットにより、例えばコーンビーム形(角錐形)に整形される。X線の放射範囲は、点線717で示されている。X軸は、回転軸Zと直交し、放射されるX線の焦点715を通る直線である。Y軸は、X軸および回転軸Zと直交する直線である。なお、説明の便宜上このXYZ座標系は、回転軸Zを中心として回転する回転座標系として説明する。
【0017】
X線検出器75は、回転軸Zを挟んでX線管71に対峙する位置およびアングルで取り付けられる。X線検出器75は、複数のX線検出素子を有している。ここでは、単一のX線検出素子が単一のチャンネルを構成しているものとして説明する。複数のチャンネルは、回転軸Zに直交し、かつ放射されるX線の焦点715を中心として、この中心から1チャンネル分のX線検出素子の受光部中心までの距離を半径とする円弧方向(チャンネル方向)とZ方向との2方向に関して2次元状に配列される。また、X線検出器75は、複数のX線検出素子を1列に配列した複数のモジュールで構成されてもよい。モジュール各々は、上記チャンネル方向に沿って略円弧方向に1次元状に配列される。
【0018】
また複数のX線検出素子は、チャンネル方向とスライス方向との2方向に関して2次元状に配列させてもよい。すなわち、2次元状の配列は、上記チャンネル方向に沿って一次元状に配列された複数のチャンネルを、スライス方向に関して複数列並べて構成される。このような2次元状のX線検出素子配列を有するX線検出器75は、略円弧方向に1次元状に配列される複数の上記モジュールをスライス方向に関して複数列並べて構成されてもよい。
【0019】
撮影又はスキャンに際しては、X線管71とX線検出器75との間の円筒形の撮影領域719内に、被検体Pが天板31に載置され挿入される。X線検出器75の出力側には、DAS(Data Acquisition System)と呼ばれるデータ収集回路77が接続される。
【0020】
データ収集回路77には、X線検出器75の各チャンネルの電流信号を電圧に変換するI−V変換器と、この電圧信号をX線の曝射周期に同期して周期的に積分する積分器と、この積分器の出力信号を増幅するアンプと、このアンプの出力信号をディジタル信号変換するアナログ・ディジタル・コンバータとが、チャンネルごとに取り付けられる。データ収集回路77から出力されるデータ(純生データ(pure raw data))は、磁気送受信又は光送受信を用いた非接触データ伝送部105を経由して、前処理部9に伝送される。
【0021】
前処理部9は、データ収集回路77から出力される純生データに対して前処理を施す。前処理には、例えばチャンネル間の感度不均一補正処理、X線強吸収体、主に金属部による極端な信号強度の低下または、信号脱落を補正する処理等が含まれる。前処理部9から出力される再構成処理直前のデータ(生データ(raw data)または、投影データと称される、ここでは投影データという)は、データ収集したときにビューアングルを表すデータと関連付けられて、磁気ディスク、光磁気ディスク、又は半導体メモリを備えた後述する記憶部19に記憶される。
【0022】
なお、投影データとは、被検体を透過したX線の強度に応じたデータ値の集合である。ここでは説明の便宜上、ワンショットで略同時に収集したビューアングルが同一である全チャンネルにわたる一揃いの投影データを、投影データセットと称する。また、ビューアングルは、X線管71が回転軸Zを中心として周回する円軌道の各位置を、回転軸Zから鉛直上向きにおける円軌道の最上部を0°として360°の範囲の角度で表したものである。なお、投影データセットの各チャンネルに対する投影データは、ビューアングル、コーン角、チャンネル番号によって識別される。また、投影データセットの各チャンネルに対する投影データは、X線管71から放出されるX線のエネルギーに応じて、識別されてもよい。
【0023】
再構成部11は、ビューアングルが360°又は180°+ファン角度の範囲内の投影データセットに基づいて、フェルドカンプ法またはコーンビーム再構成法により、略円柱形の3次元画像を再構成する機能を有する。ボリュームデータにおけるスライス面に垂直な方向(Z方向)の端の領域には、撮像視野(Field of view)の領域を再構成するための360°分の投影データがそろわない領域が存在する。投影データが不足する領域は、ボリュームデータの信頼性が低い。投影データが不足する領域は、再構成しない又は再構成画像を表示しない。この領域は一般にマスク(MASK)領域と称される。フェルドカンプ法は、コーンビームのように再構成面に対して投影レイが交差する場合の再構成法である。フェルドカンプ法は、コーン角が小さいことを前提として畳み込みの際にはコーンビームをファン投影ビームとみなして再構成処理し、逆投影においてはスキャンの際のレイに沿って再構成処理する近似的画像再構成法である。コーンビーム再構成法は、フェルドカンプ法よりもコーン角のエラーが抑えられる方法として、再構成面に対するレイの角度に応じて投影データを補正する再構成法である。
【0024】
インターフェース13は、本X線コンピュータ断層撮影装置1と電子的通信回線(以下ネットワークと呼ぶ)とを接続する。ネットワークには、例えば、放射線部門情報管理システム(Radiology Information System:以下RISと呼ぶ)と病院情報システム(Hospital Information System:以下HISと呼ぶ)とのうち少なくとも一方が接続されてもよい。
【0025】
表示部15は、再構成部11で再構成された医用画像、X線コンピュータ断層撮影のために設定される条件などを表示する。
【0026】
計算部17は、サーボアンプ793から出力された回転トルクと、回転フレームの直径Dとを用いて、スリップリング81に対するブラシ82の抵抗値(以下、摺動抵抗Rと呼ぶ)を計算する。回転トルクは、定速で回転フレーム73を回転させた時のトルクである。回転トルクには、スリップリング81にブラシ82を接触させた状態における回転トルク(以下、接触回転トルクT1と呼ぶ)と、スリップリング81からブラシ82を分離させた状態における回転トルク(以下、分離回転トルクT2と呼ぶ)との2種類の回転トルクがある。
【0027】
接触回転トルクT1は、ブラシの摺動抵抗Rと回転フレーム73に設けられたベアリングによる摩擦抵抗とに関する。分離回転トルクT2は、ベアリングによる摩擦抵抗に関する。接触回転トルクT1から分離回転トルクT2を差分することにより、ブラシ82の摺動抵抗Rに関するトルクが計算される。具体的には、計算部17は、摺動抵抗Rを、接触回転トルクT1と分離回転トルクT2と回転フレーム73の直径Dとを用いて、例えば以下の式により計算する。
【0028】
R=2×(T1−T2)/D
以下、より正確な摺動抵抗について説明をするため、摺動抵抗Rは、接触回転トルクT1から分離回転トルクT2を差分した差分値の2倍を、回転フレーム73の直径Dで除算した値と定義する。
【0029】
記憶部19は、再構成部11で再構成された医用画像(以下再構成画像と呼ぶ)を記憶する。記憶部19は、後述する入力部21により入力された操作者の指示、画像処理の条件、撮影条件などの情報を記憶する。記憶部19は、前処理部9から出力された投影データを記憶する。記憶部19は、X線コンピュータ断層撮影のために高電圧発生部5、ガントリ7、図示していない寝台部などを制御する制御プログラムなどを記憶する。記憶部19は、後述する警告出力部25で用いられる所定の値を記憶する。所定の値とは、例えば、ブラシ23の交換時期におけるブラシの摩耗に関する摺動抵抗Rである。
【0030】
入力部21は、操作者が所望するX線コンピュータ断層撮影の撮影条件、所定の値などを入力する。具体的には、入力部21は、操作者からの各種指示・命令・情報・選択・設定を本X線コンピュータ断層撮影装置1に取り込む。入力部21は、図示しないが、関心領域の設定などを行うためのトラックボール、スイッチボタン、マウス、キーボード等を有する。入力部21は、表示画面上に表示されるカーソルの座標を検出し、検出した座標を制御部23に出力する。なお、入力部21は、表示画面を覆うように設けられたタッチパネルでもよい。この場合、入力部21は、電磁誘導式、電磁歪式、感圧式等の座標読み取り原理でタッチ指示された座標を検出し、検出した座標を制御部23に出力する。なお、入力部21は、後述する警告出力部25で用いられる所定の値を入力することも可能である。
【0031】
制御部23は、本X線コンピュータ断層撮影装置1の中枢として機能する。制御部23は、図示しないCPUを備える。制御部23は、記憶部19に記憶された制御プログラムに基づいて、X線コンピュータ断層撮影のために高電圧発生部5、およびガントリ7などを制御する。制御部23は、所定の画像発生・表示等を実行するための制御プログラムを、図示していない記憶部から読み出して自身が有するメモリ上に展開し、各種処理に関する演算・処理等を実行する。
【0032】
制御部23は、本X線コンピュータ断層撮影装置1に電力が供給されることを契機として、スリップリング81にブラシ82を接触させた状態で、回転フレーム73を定速で回転させるために駆動部79を制御する。本X線コンピュータ断層撮影装置1に電力が供給されることとは、例えば、本X線コンピュータ断層撮影装置1の電源をONすることである。
【0033】
制御部23は、サーボアンプ793から計算部17への接触回転トルクT1の出力を契機として、スリップリング81からブラシ82を分離させるために、ブラシ支持部83に設けられたアクチュエータ84を制御する。これにより、ブラシ82がスリップリング81から分離される。制御部23は、スリップリング81からブラシ82を分離させた状態で、回転フレーム73を定速で回転させるために駆動部79を制御する。制御部23は、サーボアンプ793から計算部19への分離回転トルクT2の出力を契機として、回転フレーム73の回転を停止させるために、駆動部79を制御する。制御部23は、回転フレーム73の停止後、スリップリング81にブラシ82を接触させるために、アクチュエータ84を制御する。なお、接触回転トルクT1および分離回転トルクT2を得るために、回転フレーム73を定速で回転させる制御は、本X線コンピュータ断層撮影装置1に電力が供給されたとき以外の検査が実行されていないとき、または、当日の検査が全て終了したときに実行されてもよい。
【0034】
なお、制御部23は、初めに、サーボアンプ793から分離回転トルクT2を計算部17に出力させるために、駆動部79を制御し、次いでサーボアンプ793から接触回転トルクT1を計算部17に出力させるために、駆動部79を制御してもよい。
【0035】
警告出力部25は、警告を出力するためのモニタとスピーカとのうち少なくとも一つを有する。警告出力部25は、計算部17で計算された摺動抵抗Rが、所定の値に達したか否かを判定する。摺動抵抗Rが所定の値に到達したとき、警告出力部25は、所定の警告を、モニタとスピーカとのうち少なくともひとつへ出力する。なお、所定の警告は、表示部15に出力されてもよい。所定の警告は、例えば、ブラシの交換または点検を促すための警告である。モニタは、所定の警告として、例えば、赤色の表示、点滅などの表示態様を表示する。スピーカは、所定の警告として、所定音を発生する。所定音とは、例えば警告音である。
【0036】
(ブラシ摩耗警告出力機能)
ブラシ摩耗警告出力機能とは、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したとき、所定の警告を出力させる機能である。以下、ブラシ摩耗警告出力機能に関する処理(以下、ブラシ摩耗警告出力処理と呼ぶ)について説明する。
【0037】
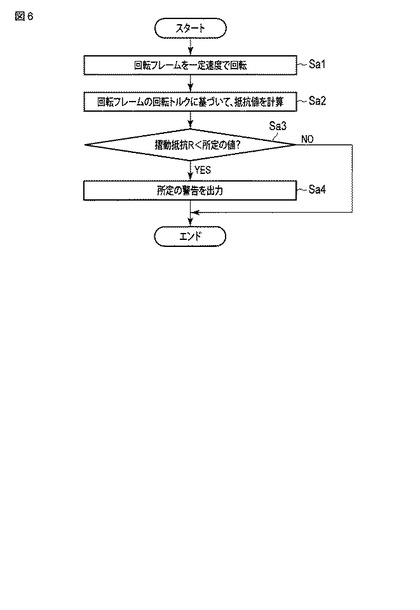
図6は、回転フレーム73の回転トルクに基づいて計算された摺動抵抗Rが所定の値に達したとき、所定の警告を出力する処理の流れの一例を示す流れ図である。
【0038】
本X線コンピュータ断層撮影装置1に電源が入れられると、回転フレーム73は、制御部23による制御のもとで、駆動部79により定速で回転される(ステップSa1)。定速での回転フレーム73の回転により、サーボアンプ793から接触回転トルクT1と分離回転トルクT2とが、計算部17に出力される。接触回転トルクT1と分離回転トルクT2とに基づいて、摺動抵抗Rが計算される(ステップSa2)。計算された摺動抵抗Rは、記憶部19に記憶された所定の値と比較される(ステップSa3)。摺動抵抗Rが所定の値未満であれば、所定の警告が出力される(ステップSa4)。
【0039】
(第1の変形例)
第1の実施形態との相違は、接触回転トルクT1と分離回転トルクT2とに基づいて、ブラシの摩耗度を計算することにある。
【0040】
計算部17は、接触回転トルクT1から分離回転トルクT2を減算することにより、摺動抵抗Rに関するトルク(以下、摺動トルクと呼ぶ)を計算する。ブラシ交換直後において、計算部17は、接触回転トルクT1から分離回転トルクT2を減算する。これにより、計算部17は、ブラシ交換直後の摺動抵抗Rに関するトルク(以下、交換直後摺動トルクと呼ぶ)を計算する。計算部17は、摺動トルクを交換直後摺動トルクで除したトルク比を計算する。計算部17は、1からトルク比を減算したブラシ摩耗度を計算する。
【0041】
記憶部19は、所定のブラシ摩耗度Bthを記憶する。なお、所定のブラシ摩耗度は、入力部21を介して、入力または変更可能である。
【0042】
警告出力部25は、計算部17で計算されたブラシ摩耗度が、所定のブラシ摩耗度に達したか否かを判定する。ブラシ摩耗度が所定のブラシ摩耗度に到達したとき、警告出力部25は、ブラシの摩耗度を所定の警告とともに、モニタとスピーカとのうち少なくともひとつへ出力する。
【0043】
(第2の変形例)
第1の実施形態および第1の変形例との相違は、摺動抵抗Rまたはブラシ摩耗度に基づいて、ブラシ摩耗量を決定し、出力することにある。ブラシ摩耗量とは、例えば、スリップリング81にブラシ82を接触させて回転フレーム73を回転させることにより、ブラシが摩耗する量または厚みである。具体的には、例えば、ブラシ摩耗量は、ブラシ82の厚みの減少量である。なお、ブラシ摩耗量は、ブラシを交換した直後のブラシの厚みに対するブラシの厚みの減少量の比であってもよい。また、ブラシ摩耗量の替わりに、ブラシの厚みが摩耗した結果におけるブラシの厚みの残存量(以下、ブラシ厚み残存量と呼ぶ)であってもよい。なお、ブラシ厚み残存量の替わりに、ブラシを交換した直後のブラシの厚みに対するブラシ厚み残存量の比(以下、残存量比及ぶ)であってもよい。
【0044】
計算部17は、摺動抵抗Rまたはブラシ摩耗度を計算する。
【0045】
記憶部19は、摺動抵抗Rに対するブラシ摩耗量の対応表(以下、摺動摩耗対応表と呼ぶ)を記憶する。なお、ブラシ摩耗量の替わりに、ブラシ厚み残存量または、残存量比であってもよい。なお、記憶部19は、摺動摩耗対応表の代わりにブラシ摩耗度に対するブラシ摩耗量の対応表を記憶してもよい。
【0046】
警告出力部25は、計算部17で計算された摺動抵抗Rと、記憶部19に記憶された摺動摩耗対応表とに基づいて、ブラシ摩耗量を決定する。決定されたブラシ摩耗量は、警告出力部25から出力される。警告出力部25は、ブラシ摩耗量を所定の警告とともに、モニタまたは表示部15に出力する。なお、警告出力部25は、ブラシ摩耗量を、所定の警告とともにスピーカから音声出力させてもよい。
【0047】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、スリップリング81に対するブラシ82の摺動抵抗Rに基づいて、ブラシ82の交換または点検を促すための所定の警告を出力することが出来る。また、本X線コンピュータ断層撮影装置1によれば、スリップリング81に対するブラシ82の摺動抵抗Rに基づいて、ブラシの摩耗度および摩耗量を、所定の警告とともに出力することが出来る。これにより、X線コンピュータ断層撮影装置1によれば、スリップリング81およびブラシ82の点検交換作業を行う適切なタイミングを、操作者に知らせることができ、上記点検交換作業の効率が向上する。加えて、上記点検交換作業のコストを抑えることが出でき、上記点検交換作業のサービス性が向上する。さらに、ブラシ82の点検および交換が適切なタイミングで実施可能なため、スリップリング機構80を介した電力伝送に関する品質を高く保つことが出来る。
【0048】
(第2の実施形態)
第1の実施形態との相違は、回転フレーム73の回転数をカウントすることにより、カウントされた回転数が所定の回転数に達したとき、所定の警告を出力することにある。
【0049】
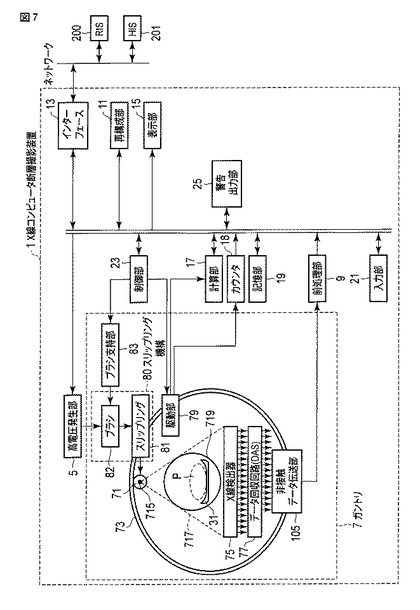
図7は、第2の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
X線コンピュータ断層撮影装置1は、第1の実施形態における構成要素に加えて、カウンタ18をさらに具備する。
【0050】
カウンタ18は、駆動部79におけるサーボモータ791からサーボアンプ793へ出力されたフィードバックパルスに基づいて、回転フレーム79の回転数をカウントする。
【0051】
記憶部19は、所定の回転数をさらに記憶する。所定の回転数とは、交換直後のブラシ82の厚みが、交換される時期におけるブラシ82の厚みまで摩耗されるまでの回転フレーム73の回転数である。すなわち、所定の回転数とは、ブラシ82が摩耗することにより、ブラシ82の交換時期に対応する回転するである。
【0052】
警告出力部25は、カウントされた回転数を所定の回転数と比較する。警告出力部25は、カウントされた回転数が所定の回転数に到達したことと、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したこととのうち少なくとも一方が達成されると、所定の警告をモニタまたはスピーカに出力する。
【0053】
(ブラシ摩耗警告出力機能)
ブラシ摩耗警告出力機能とは、カウントされた回転数が所定の回転数に到達したとき、または摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したとき、所定の警告を出力させる機能である。以下、ブラシ摩耗警告出力機能に関する処理(以下、ブラシ摩耗警告出力処理と呼ぶ)について説明する。
【0054】
本X線コンピュータ断層撮影装置1により、回転フレーム73が回転されると、カウンタ18により、回転フレーム73の回転数がカウントされる。カウントされた回転数は、所定の回転数と比較される。カウントされた回転数が所定の回転数に到達したことと、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したこととのうち少なくとも一方が達成されると、所定の警告が、警告出力部25からモニタまたはスピーカへ出力される。
【0055】
(第3の変形例)
第2の実施形態との相違は、ネットワークを介して本X線コンピュータ断層撮影装置1に接続されたRIS200とHIS201との少なくとも一方から受信されたX線コンピュータ断層撮影の検査予約数、または入力部21を介して入力されたX線コンピュータ断層撮影の検査予約数に基づいて、回転フレーム73の回転数を決定する。次いで、決定された回転数とカウンタでカウントされた回転数との和が、所定の回転数に到達したとき、所定の警告を出力することにある。
【0056】
RIS200は、放射線部門の業務を効率的に進めるコンピュータシステムである。具体的には、RIS200は、放射線部門に対する検査オーダの参照、検査実施情報の記録、会計情報の記録および伝送、フィルムなどの消耗品の在庫管理、各種統計処理を行うコンピュータシステムである。X線コンピュータ断層撮影の検査予約数が、X線コンピュータ断層撮影装置1を使用する検査の予約表に基づいて、放射線技師などによりRIS200に入力される。
【0057】
HIS201は、病院内の業務を効率的に行うためのコンピュータシステム全体を指し、医事会計システム、検査オーダシステム、薬剤システム、給食システム、病棟管理システムなどから構成される。HIS200は、医師の患者に対する診察に基づいて、X線コンピュータ断層撮影の指示箋を発行する。発行されたX線コンピュータ断層撮影の指示箋に基づいて、X線コンピュータ断層撮影が実施される。RIS200およびHIS201は、X線コンピュータ断層撮影に関する検査予約数を記憶する。なお、検査予約数は、入力部21を介して入力されてもよい。
【0058】
記憶部19は、RIS200およびHIS201に記憶された検査予約数を、インターフェース13を介して受信し、記憶する。なお、記憶部19は、入力部21を介して入力された検査予約数を記憶してもよい。記憶部19は、検査予約数に対する回転フレーム73の回転数の対応表(以下、予約回転数対応表と呼ぶ)を記憶する。
【0059】
計算部17は、記憶部19に記憶された検査予約数と予約回転数対応表とに基づいて、回転フレーム73の回転数(以下、予約回転数と呼ぶ)を決定する。計算部17は、決定された予約回転数と、カウンタによりカウントされた回転数との和(以下、合計回転数と呼ぶ)を計算する。
【0060】
警告出力部25は、計算された合計回転数を所定の回転数と比較する。警告出力部25は、カウントされた回転数が所定の回転数に到達したことと、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したこととのうち少なくとも一方が達成されると、所定の警告をモニタまたはスピーカに出力する。
【0061】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、カウントされた回転フレーム73の回転数に基づいて、ブラシ82の交換または点検を促すための所定の警告を出力することが出来る。また、本X線コンピュータ断層撮影装置1によれば、合計回転数に基づいて、ブラシ82の交換または点検を促すための所定の警告を出力することが出来る。これにより、X線コンピュータ断層撮影装置1によれば、スリップリング81およびブラシ82の点検交換作業を行う適切なタイミングを、ブラシが摩耗する前に、操作者に知らせることができ、上記点検交換作業の効率が向上する。加えて、上記点検交換作業のコストを抑えることが出でき、上記点検交換作業のサービス性が向上する。さらに、ブラシ82の点検および交換が適切なタイミングで実施可能なため、スリップリング機構80を介した電力伝送に関する品質を高く保つことが出来る。
【0062】
(第3の実施形態)
第1、2の実施形態との相違は、スリップリング81に対するブラシ82の摺動抵抗Rを、所定の範囲に位置させるために、ブラシ支持部83におけるアクチュエータ84を制御することにある。
【0063】
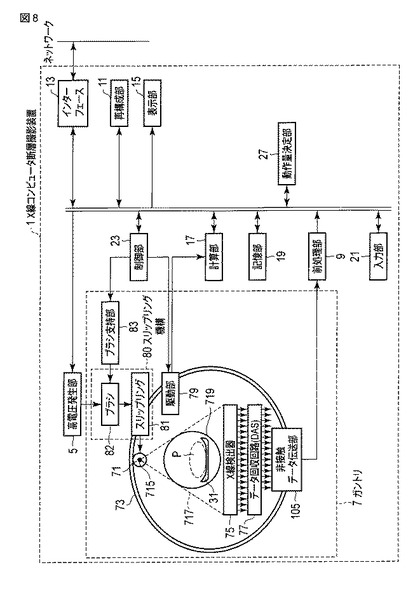
図8は、第3の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
計算部17は、第1の実施形態で説明した処理により摺動抵抗Rを計算する。計算部17は、計算した摺動抵抗Rを動作量決定部27に出力する。
【0064】
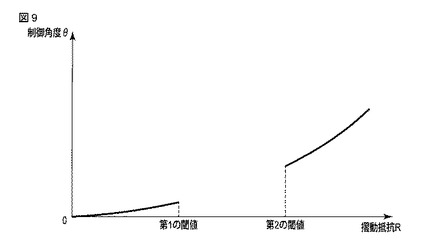
動作量決定部27は、計算された抵抗値に基づいて、ブラシ支持部の動作量を決定する。具値的には、動作量決定部27は、第1の閾値より小さい摺動抵抗Rおよび第2の閾値より大きい摺動抵抗Rに対する角度(以下、制御角度と呼ぶ)の抵抗角度対応表を、図示していないメモリに記憶する。制御角度は、アクチュエータ84の駆動範囲における角度である。第1の閾値より小さい摺動抵抗Rは、ブラシ82をスリップリング81に押し付ける力(以下、押圧力と呼ぶ)が最適な押圧力に比べて小さい場合に対応する。第2の閾値より大きい摺動抵抗Rは、押圧力が最適な押圧力に比べて大きい場合に対応する。なお、対面分離機構がブラシ支持部83と固定部との間に設けられている場合、固定部とブラシ支持部83との距離が上記制御角度の代わりに用いられる。
【0065】
図9は、摺動抵抗Rに対する制御角度の対応表の一例を、グラフで示した図である。図9によれば、摺動抵抗Rに応じて、動作量決定部27により制御角度が決定される。
【0066】
動作量決定部27は、図示していないメモリに記憶された抵抗角度対応表を読み出す。動作量決定部27は、計算部17から出力された摺動抵抗Rと、メモリから読み出した抵抗角度対応表とに基づいて、制御角度を決定する。
【0067】
制御部23は、固定部とブラシ支持部83との角度θが決定された制御角度となるように、ブラシ支持部83におけるアクチュエータ84を制御する。
【0068】
(摺動抵抗制御機能)
摺動抵抗制御機能とは、計算部17で計算された摺動抵抗Rと抵抗角度対応表とに基づいて制御角度を決定し、決定された制御角度となるようにブラシ支持部83におけるアクチュエータ84を制御させる機能である。以下、摺動抵抗制御機能に関する処理(以下、摺動抵抗制御処理と呼ぶ)について説明する。
【0069】
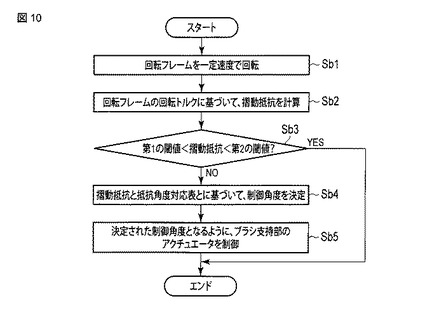
図10は、摺動抵抗制御処理の流れの一例を示す流れ図である。
回転フレーム73が、制御部23による制御のもとで、駆動部79により定速で回転される(ステップSb1)。定速での回転フレーム73の回転により、サーボアンプ793から接触回転トルクT1と分離回転トルクT2とが、計算部17に出力される。接触回転トルクT1と分離回転トルクT2とに基づいて、摺動抵抗Rが計算される(ステップSb2)。計算された摺動抵抗Rは、記憶部19に記憶された第1、第2の閾値と比較される。(ステップSb3)。摺動抵抗Rが第1の閾値以下であり、かつ第2の閾値以上である場合、摺動抵抗Rと抵抗角度対応表とに基づいて、制御角度が決定される(ステップSb4)。決定された制御角度となるように、ブラシ支持部83におけるアクチュエータ84が制御される。
【0070】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、計算された摺動抵抗Rと抵抗角度対応表とに基づいて制御角度を決定し、決定された制御角度となるようにブラシ支持部83におけるアクチュエータ84を制御することができる。これにより、X線コンピュータ断層撮影装置1によれば、スリップリング81に対するブラシ82の押圧力を最適化することができる。以上のことから、ブラシ82の押圧力を最適化できるため、スリップリング機構80を介した電力伝送に関する品質を高く保つことが出来る。
【0071】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0072】
1…X線コンピュータ断層撮影装置、5…高電圧発生部、7…ガントリ、11…再構成部、13…インターフェース、15…表示部、17…計算部、18…カウンタ、19…記憶部、21…入力部、23…制御部、25…警告出力部、27…動作量決定部、31…天板、71…X線管、73…回転リング、75…X線検出器、77…データ収集回路(DAS)、79…駆動部、80…スリップリング機構、81…スリップリング、82…ブラシ、83…ブラシ支持部、84…アクチュエータ、105…非接触データ伝送部、200…放射線部門情報管理システム(RIS)、201…病院情報システム(HIS)、715…X線の焦点、717…X線の放射範囲、719…撮影領域、791…サーボモータ、793…サーボアンプ
【技術分野】
【0001】
本発明の実施形態は、スリップリング機構を有するX線コンピュータ断層撮影装置に関する。
【背景技術】
【0002】
従来、X線コンピュータ断層撮影装置は、回転部に電力を供給するために、回転部にスリップリングが設けられ、固定部にブラシが設けられている。スリップリングとブラシとを接触させることにより、回転部に電力が供給される。X線コンピュータ断層撮影装置の継続使用により、ブラシは摩耗する。ブラシが摩耗すると、回転部への電力伝達効率が低減する。加えて、ブラシの摩耗は、ブラシとスリップリングとの間に間隙を生じさせることがある。間隙は、放電を発生させることがある。これらにより、回転部における例えばX線管への電力の安定供給が損なわれることがある。X線管への電力の安定供給が損なわれると、X線強度の変動が発生する場合がある。X線強度の変動は、アーチファクトを発生させることがある。
【0003】
従来、ブラシの摩耗に関する点検及び交換は、定期的に実行されている。また、ブラシの摩耗具合(以下、摩耗度と呼ぶ)に関する点検は、メンテナンス従事者の目視により実行されている。摩耗度は、X線コンピュータ断層撮影装置の稼働条件および使用状況により変化する。このため、定期的な点検では、想定以上のブラシの摩耗を検知できない問題がある。加えて、ブラシの摩耗がほとんど発生していないにもかかわらず、定期的な点検作業の実施の実施は、作業効率および費用対効果が悪い問題がある。以上のことから、ブラシの交換などのメンテナンスを適切なタイミングで実行する必要があるにもかかわらず、このタイミングを検知できない問題がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的は、X線コンピュータ断層撮影装置におけるブラシの交換時期を検知することにある。
【課題を解決するための手段】
【0005】
本実施形態に係るX線コンピュータ断層撮影装置は、X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、前記回転フレームを回転駆動させる駆動部と、前記回転フレームに設けられたスリップリングと前記スリップリングに接触するブラシとを有するスリップリング機構と、前記駆動部により発生された前記回転フレームの回転トルクに基づいて、前記ブラシと前記スリップリングとの接触による抵抗値を計算する計算部と、前記計算された抵抗値が所定の値に到達したとき、所定の警告を出力する警告出力部と、を具備することを特徴とする。
【図面の簡単な説明】
【0006】
【図1】図1は、第1の実施形態に係るX線コンピュータ断層撮影装置の構成を示す図である。
【図2】図2は、第1の実施形態に係り、回転フレームの断面を、回転フレームに取り付けられたスリップリングとともに示す断面図である。
【図3】図3は、第1の実施形態に係り、ブラシ支持部を固定部に取り付けた一例を示す図である。
【図4】図4は、第1の実施形態に係り、スリップリングに接触されたブラシの断面の一例を示す図である。
【図5】図5は、第1の実施形態に係り、駆動部の構成の一例を、駆動部に関連する各部とともに示す図である。
【図6】図6は、第1の実施形態に係り、回転フレームの回転トルクに基づいて計算された摺動抵抗が所定の値に達したとき、所定の警告を表示させる処理の流れの一例を示す流れ図である。
【図7】図7は、第2の実施形態に係るX線コンピュータ断層撮影装置の構成の一例を示す図である。
【図8】図8は、第3の実施形態に係るX線コンピュータ断層撮影装置の構成の一例を示す図である。
【図9】図9は、第3の実施形態に係り、摺動抵抗Rに対する制御角度θの対応表の一例を、グラフで示した図である。
【図10】図10は、第3の実施形態に係り、回転フレームの回転トルクに基づいて抵抗値を計算し、ブラシ支持部を制御する処理の流れの一例を示す流れ図である。
【発明を実施するための形態】
【0007】
以下、X線コンピュータ断層撮影装置(Computed Tomography)の実施形態について図面を参照しながら説明する。なお、X線コンピュータ断層撮影装置には、X線管とX線検出器とが一体として被検体の周囲を回転するRotate/Rotate−Type、リング状にアレイされた多数のX線検出素子が固定され、X線管のみが被検体の周囲を回転するStationary/Rotate−Type等様々なタイプがあり、いずれのタイプでも本実施形態へ適用可能である。また、画像を再構成するには被検体の周囲一周、360°分の投影データが、またハーフスキャン法でも180°+ファン角度分の投影データが必要とされる。いずれの再構成方式に対しても本実施形態へ適用可能である。また、入射X線を電荷に変化するメカニズムは、シンチレータ等の蛍光体でX線を光に変換し更にその光をフォトダイオード等の光電変換素子で電荷に変換する間接変換形と、X線によるセレン等の半導体内での電子正孔対の生成及びその電極への移動すなわち光導電現象を利用した直接変換形とが主流である。X線検出素子としては、それらのいずれの方式を採用してもよい。さらに、近年では、X線管とX線検出器との複数のペアを回転リングに搭載したいわゆる多管球型のX線コンピュータ断層撮影装置の製品化が進み、その周辺技術の開発が進んでいる。本実施形態においては、従来からの一管球型のX線コンピュータ断層撮影装置であっても、多管球型のX線コンピュータ断層撮影装置であってもいずれも適用可能である。ここでは、一管球型として説明する。
【0008】
なお、以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0009】
(第1の実施形態)
図1は、第1の実施形態に係るX線コンピュータ断層撮影装置の構成を示す図である。
第1の実施形態に係るX線コンピュータ断層撮影装置1は、高電圧発生部5、ガントリ7、前処理部9、再構成部11、インターフェース13、表示部15、計算部17、記憶部19、入力部21、制御部23、警告出力部25を有する。
【0010】
高電圧発生部5は、X線管71に供給するための高電圧を発生する。図1において、高電圧発生部5は、ガントリ7の外部に設けられている。なお、高電圧発生部5は、後述する回転フレーム73に搭載されてもよい。以下、説明の便宜上、高電圧発生部5は、ガントリ7の外部に設けられているものとする。
【0011】
ガントリ7には、回転支持機構が収容される。回転支持機構は、回転フレーム73と、回転軸Zを中心として回転自在に回転フレーム73を支持するフレーム支持機構と回転フレーム73の回転を駆動する駆動部79とを有する。回転フレーム73には、X線管71と、2次元アレイ型または多列型とも称されるエリア検出器(以下X線検出器75と呼ぶ)とが搭載される。X線検出器75は、撮影領域719を挟んでX線管71に対向する。X線管71は、スリップリング機構80を介して、高電圧発生部5に電気的に接続される。スリップリング機構80は、回転フレーム73に取り付けられたスリップリング81と、スリップリング81の外周の特定位置に配置されたブラシ82とを有する。スリップリング81は、リング状になった導電性のレールである。ブラシ82は、スリップリング81の表面に接触される導電性の摺動子である。図2は、回転フレーム73の断面をスリップリング81とともに示す図である。
【0012】
ブラシ82は、ブラシ支持部83により支持される。ブラシ支持部83は、図1に図示していないアクチュエータを有する。アクチュエータは、後述する制御部23による制御のもとで、スリップリング81からブラシ82を分離させるために、ブラシ支持部83を駆動させる。アクチュエータは、後述する制御23による制御のもとで、スリップリング81にブラシ82を接触させるために、ブラシ支持部83を駆動させる。上記アクチュエータによる駆動により、ブラシ支持部83は、スリップリング81に対してブラシを着脱可能に支持する。ブラシ支持部83は、ガントリ7内の図示していない固定部に設けられる。
【0013】
図3は、ブラシ支持部83を固定部に取り付けた一例を示す図である。図3に示すように、ブラシ支持部83は、アクチュエータ84により、駆動範囲(θ)で駆動される。ブラシ支持部83を駆動させることにより、ブラシ82は、所定の押圧力でスリップリング81に接触される。なお、ブラシ支持部83は、アクチュエータ84を介さずに直接的に固定部に設置されてもよい。このとき、ブラシ83は、スリップリング81に常時接触した状態となる。なお、ブラシ支持部83は、図3のように限定されるわけではない。例えば、アクチュエータ84の替わりに、スリップリング81とブラシ82とを対面させたままスリップリング81からブラシ82を分離させる機構(以下、対面分離機構と呼ぶ)が、ブラシ支持部83と固定部との間に設けられてもよい。図4は、スリップリングに接触されたブラシの一例を示す図である。なお、回転フレーム73にブラシ82が設けられ、固定部にスリップリング81が設けられてもよい。
【0014】
駆動部79は、後述する制御部23による制御の下で、ダイレクトドライブまたはベルトドライブにより、回転フレーム73を回転させる。図5は、駆動部79の構成の一例を、駆動部79に関連する各部とともに示す図である。駆動部79は、サーボモータ791とサーボアンプ793とを有する。サーボモータ791は、サーボアンプ793から供給された電流を用いて、回転フレーム73を回転させるための回転トルクを発生する。発生された回転トルクは、ダイレクトドライブまたはベルトドライブを介して、回転フレーム73に伝達される。この伝達により、サーボモータ791は、回転フレーム73を回転させる。サーボモータ791は、モータの回転数に比例したフィードバックパルスを、サーボアンプ793に出力する。
【0015】
サーボアンプ793は、後述する制御部23から出力された駆動指令と、サーボモータ791から出力されたフィードバックパルスとに基づいて、サーボモータ791に供給する電流を制御する。具体的には、サーボアンプ793は、駆動指令とフィードバックパルスとに基づいて、正弦波状の電流に関する大きさを、電気角に応じて変化させる。電流の大きさを変化させることにより、回転トルクは変化する。このようにして、サーボアンプ793は、サーボモータ791を制御する。サーボアンプ793は、サーボモータ791から出力されたフィードバックパルスに基づいて、回転フレーム73の回転トルクを、後述する計算部17に出力する。
【0016】
X線管71は、高電圧発生部5からスリップリング機構80を経由(ブラシ82とスリップリング81)して電圧の印加および電流の供給を受ける。X線管71は、電圧の印加および電流の供給を受けて、X線の焦点715からX線を放射する。X線の焦点715から放射されたX線は、X線管71のX線放射窓に取り付けられたコリメーターユニットにより、例えばコーンビーム形(角錐形)に整形される。X線の放射範囲は、点線717で示されている。X軸は、回転軸Zと直交し、放射されるX線の焦点715を通る直線である。Y軸は、X軸および回転軸Zと直交する直線である。なお、説明の便宜上このXYZ座標系は、回転軸Zを中心として回転する回転座標系として説明する。
【0017】
X線検出器75は、回転軸Zを挟んでX線管71に対峙する位置およびアングルで取り付けられる。X線検出器75は、複数のX線検出素子を有している。ここでは、単一のX線検出素子が単一のチャンネルを構成しているものとして説明する。複数のチャンネルは、回転軸Zに直交し、かつ放射されるX線の焦点715を中心として、この中心から1チャンネル分のX線検出素子の受光部中心までの距離を半径とする円弧方向(チャンネル方向)とZ方向との2方向に関して2次元状に配列される。また、X線検出器75は、複数のX線検出素子を1列に配列した複数のモジュールで構成されてもよい。モジュール各々は、上記チャンネル方向に沿って略円弧方向に1次元状に配列される。
【0018】
また複数のX線検出素子は、チャンネル方向とスライス方向との2方向に関して2次元状に配列させてもよい。すなわち、2次元状の配列は、上記チャンネル方向に沿って一次元状に配列された複数のチャンネルを、スライス方向に関して複数列並べて構成される。このような2次元状のX線検出素子配列を有するX線検出器75は、略円弧方向に1次元状に配列される複数の上記モジュールをスライス方向に関して複数列並べて構成されてもよい。
【0019】
撮影又はスキャンに際しては、X線管71とX線検出器75との間の円筒形の撮影領域719内に、被検体Pが天板31に載置され挿入される。X線検出器75の出力側には、DAS(Data Acquisition System)と呼ばれるデータ収集回路77が接続される。
【0020】
データ収集回路77には、X線検出器75の各チャンネルの電流信号を電圧に変換するI−V変換器と、この電圧信号をX線の曝射周期に同期して周期的に積分する積分器と、この積分器の出力信号を増幅するアンプと、このアンプの出力信号をディジタル信号変換するアナログ・ディジタル・コンバータとが、チャンネルごとに取り付けられる。データ収集回路77から出力されるデータ(純生データ(pure raw data))は、磁気送受信又は光送受信を用いた非接触データ伝送部105を経由して、前処理部9に伝送される。
【0021】
前処理部9は、データ収集回路77から出力される純生データに対して前処理を施す。前処理には、例えばチャンネル間の感度不均一補正処理、X線強吸収体、主に金属部による極端な信号強度の低下または、信号脱落を補正する処理等が含まれる。前処理部9から出力される再構成処理直前のデータ(生データ(raw data)または、投影データと称される、ここでは投影データという)は、データ収集したときにビューアングルを表すデータと関連付けられて、磁気ディスク、光磁気ディスク、又は半導体メモリを備えた後述する記憶部19に記憶される。
【0022】
なお、投影データとは、被検体を透過したX線の強度に応じたデータ値の集合である。ここでは説明の便宜上、ワンショットで略同時に収集したビューアングルが同一である全チャンネルにわたる一揃いの投影データを、投影データセットと称する。また、ビューアングルは、X線管71が回転軸Zを中心として周回する円軌道の各位置を、回転軸Zから鉛直上向きにおける円軌道の最上部を0°として360°の範囲の角度で表したものである。なお、投影データセットの各チャンネルに対する投影データは、ビューアングル、コーン角、チャンネル番号によって識別される。また、投影データセットの各チャンネルに対する投影データは、X線管71から放出されるX線のエネルギーに応じて、識別されてもよい。
【0023】
再構成部11は、ビューアングルが360°又は180°+ファン角度の範囲内の投影データセットに基づいて、フェルドカンプ法またはコーンビーム再構成法により、略円柱形の3次元画像を再構成する機能を有する。ボリュームデータにおけるスライス面に垂直な方向(Z方向)の端の領域には、撮像視野(Field of view)の領域を再構成するための360°分の投影データがそろわない領域が存在する。投影データが不足する領域は、ボリュームデータの信頼性が低い。投影データが不足する領域は、再構成しない又は再構成画像を表示しない。この領域は一般にマスク(MASK)領域と称される。フェルドカンプ法は、コーンビームのように再構成面に対して投影レイが交差する場合の再構成法である。フェルドカンプ法は、コーン角が小さいことを前提として畳み込みの際にはコーンビームをファン投影ビームとみなして再構成処理し、逆投影においてはスキャンの際のレイに沿って再構成処理する近似的画像再構成法である。コーンビーム再構成法は、フェルドカンプ法よりもコーン角のエラーが抑えられる方法として、再構成面に対するレイの角度に応じて投影データを補正する再構成法である。
【0024】
インターフェース13は、本X線コンピュータ断層撮影装置1と電子的通信回線(以下ネットワークと呼ぶ)とを接続する。ネットワークには、例えば、放射線部門情報管理システム(Radiology Information System:以下RISと呼ぶ)と病院情報システム(Hospital Information System:以下HISと呼ぶ)とのうち少なくとも一方が接続されてもよい。
【0025】
表示部15は、再構成部11で再構成された医用画像、X線コンピュータ断層撮影のために設定される条件などを表示する。
【0026】
計算部17は、サーボアンプ793から出力された回転トルクと、回転フレームの直径Dとを用いて、スリップリング81に対するブラシ82の抵抗値(以下、摺動抵抗Rと呼ぶ)を計算する。回転トルクは、定速で回転フレーム73を回転させた時のトルクである。回転トルクには、スリップリング81にブラシ82を接触させた状態における回転トルク(以下、接触回転トルクT1と呼ぶ)と、スリップリング81からブラシ82を分離させた状態における回転トルク(以下、分離回転トルクT2と呼ぶ)との2種類の回転トルクがある。
【0027】
接触回転トルクT1は、ブラシの摺動抵抗Rと回転フレーム73に設けられたベアリングによる摩擦抵抗とに関する。分離回転トルクT2は、ベアリングによる摩擦抵抗に関する。接触回転トルクT1から分離回転トルクT2を差分することにより、ブラシ82の摺動抵抗Rに関するトルクが計算される。具体的には、計算部17は、摺動抵抗Rを、接触回転トルクT1と分離回転トルクT2と回転フレーム73の直径Dとを用いて、例えば以下の式により計算する。
【0028】
R=2×(T1−T2)/D
以下、より正確な摺動抵抗について説明をするため、摺動抵抗Rは、接触回転トルクT1から分離回転トルクT2を差分した差分値の2倍を、回転フレーム73の直径Dで除算した値と定義する。
【0029】
記憶部19は、再構成部11で再構成された医用画像(以下再構成画像と呼ぶ)を記憶する。記憶部19は、後述する入力部21により入力された操作者の指示、画像処理の条件、撮影条件などの情報を記憶する。記憶部19は、前処理部9から出力された投影データを記憶する。記憶部19は、X線コンピュータ断層撮影のために高電圧発生部5、ガントリ7、図示していない寝台部などを制御する制御プログラムなどを記憶する。記憶部19は、後述する警告出力部25で用いられる所定の値を記憶する。所定の値とは、例えば、ブラシ23の交換時期におけるブラシの摩耗に関する摺動抵抗Rである。
【0030】
入力部21は、操作者が所望するX線コンピュータ断層撮影の撮影条件、所定の値などを入力する。具体的には、入力部21は、操作者からの各種指示・命令・情報・選択・設定を本X線コンピュータ断層撮影装置1に取り込む。入力部21は、図示しないが、関心領域の設定などを行うためのトラックボール、スイッチボタン、マウス、キーボード等を有する。入力部21は、表示画面上に表示されるカーソルの座標を検出し、検出した座標を制御部23に出力する。なお、入力部21は、表示画面を覆うように設けられたタッチパネルでもよい。この場合、入力部21は、電磁誘導式、電磁歪式、感圧式等の座標読み取り原理でタッチ指示された座標を検出し、検出した座標を制御部23に出力する。なお、入力部21は、後述する警告出力部25で用いられる所定の値を入力することも可能である。
【0031】
制御部23は、本X線コンピュータ断層撮影装置1の中枢として機能する。制御部23は、図示しないCPUを備える。制御部23は、記憶部19に記憶された制御プログラムに基づいて、X線コンピュータ断層撮影のために高電圧発生部5、およびガントリ7などを制御する。制御部23は、所定の画像発生・表示等を実行するための制御プログラムを、図示していない記憶部から読み出して自身が有するメモリ上に展開し、各種処理に関する演算・処理等を実行する。
【0032】
制御部23は、本X線コンピュータ断層撮影装置1に電力が供給されることを契機として、スリップリング81にブラシ82を接触させた状態で、回転フレーム73を定速で回転させるために駆動部79を制御する。本X線コンピュータ断層撮影装置1に電力が供給されることとは、例えば、本X線コンピュータ断層撮影装置1の電源をONすることである。
【0033】
制御部23は、サーボアンプ793から計算部17への接触回転トルクT1の出力を契機として、スリップリング81からブラシ82を分離させるために、ブラシ支持部83に設けられたアクチュエータ84を制御する。これにより、ブラシ82がスリップリング81から分離される。制御部23は、スリップリング81からブラシ82を分離させた状態で、回転フレーム73を定速で回転させるために駆動部79を制御する。制御部23は、サーボアンプ793から計算部19への分離回転トルクT2の出力を契機として、回転フレーム73の回転を停止させるために、駆動部79を制御する。制御部23は、回転フレーム73の停止後、スリップリング81にブラシ82を接触させるために、アクチュエータ84を制御する。なお、接触回転トルクT1および分離回転トルクT2を得るために、回転フレーム73を定速で回転させる制御は、本X線コンピュータ断層撮影装置1に電力が供給されたとき以外の検査が実行されていないとき、または、当日の検査が全て終了したときに実行されてもよい。
【0034】
なお、制御部23は、初めに、サーボアンプ793から分離回転トルクT2を計算部17に出力させるために、駆動部79を制御し、次いでサーボアンプ793から接触回転トルクT1を計算部17に出力させるために、駆動部79を制御してもよい。
【0035】
警告出力部25は、警告を出力するためのモニタとスピーカとのうち少なくとも一つを有する。警告出力部25は、計算部17で計算された摺動抵抗Rが、所定の値に達したか否かを判定する。摺動抵抗Rが所定の値に到達したとき、警告出力部25は、所定の警告を、モニタとスピーカとのうち少なくともひとつへ出力する。なお、所定の警告は、表示部15に出力されてもよい。所定の警告は、例えば、ブラシの交換または点検を促すための警告である。モニタは、所定の警告として、例えば、赤色の表示、点滅などの表示態様を表示する。スピーカは、所定の警告として、所定音を発生する。所定音とは、例えば警告音である。
【0036】
(ブラシ摩耗警告出力機能)
ブラシ摩耗警告出力機能とは、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したとき、所定の警告を出力させる機能である。以下、ブラシ摩耗警告出力機能に関する処理(以下、ブラシ摩耗警告出力処理と呼ぶ)について説明する。
【0037】
図6は、回転フレーム73の回転トルクに基づいて計算された摺動抵抗Rが所定の値に達したとき、所定の警告を出力する処理の流れの一例を示す流れ図である。
【0038】
本X線コンピュータ断層撮影装置1に電源が入れられると、回転フレーム73は、制御部23による制御のもとで、駆動部79により定速で回転される(ステップSa1)。定速での回転フレーム73の回転により、サーボアンプ793から接触回転トルクT1と分離回転トルクT2とが、計算部17に出力される。接触回転トルクT1と分離回転トルクT2とに基づいて、摺動抵抗Rが計算される(ステップSa2)。計算された摺動抵抗Rは、記憶部19に記憶された所定の値と比較される(ステップSa3)。摺動抵抗Rが所定の値未満であれば、所定の警告が出力される(ステップSa4)。
【0039】
(第1の変形例)
第1の実施形態との相違は、接触回転トルクT1と分離回転トルクT2とに基づいて、ブラシの摩耗度を計算することにある。
【0040】
計算部17は、接触回転トルクT1から分離回転トルクT2を減算することにより、摺動抵抗Rに関するトルク(以下、摺動トルクと呼ぶ)を計算する。ブラシ交換直後において、計算部17は、接触回転トルクT1から分離回転トルクT2を減算する。これにより、計算部17は、ブラシ交換直後の摺動抵抗Rに関するトルク(以下、交換直後摺動トルクと呼ぶ)を計算する。計算部17は、摺動トルクを交換直後摺動トルクで除したトルク比を計算する。計算部17は、1からトルク比を減算したブラシ摩耗度を計算する。
【0041】
記憶部19は、所定のブラシ摩耗度Bthを記憶する。なお、所定のブラシ摩耗度は、入力部21を介して、入力または変更可能である。
【0042】
警告出力部25は、計算部17で計算されたブラシ摩耗度が、所定のブラシ摩耗度に達したか否かを判定する。ブラシ摩耗度が所定のブラシ摩耗度に到達したとき、警告出力部25は、ブラシの摩耗度を所定の警告とともに、モニタとスピーカとのうち少なくともひとつへ出力する。
【0043】
(第2の変形例)
第1の実施形態および第1の変形例との相違は、摺動抵抗Rまたはブラシ摩耗度に基づいて、ブラシ摩耗量を決定し、出力することにある。ブラシ摩耗量とは、例えば、スリップリング81にブラシ82を接触させて回転フレーム73を回転させることにより、ブラシが摩耗する量または厚みである。具体的には、例えば、ブラシ摩耗量は、ブラシ82の厚みの減少量である。なお、ブラシ摩耗量は、ブラシを交換した直後のブラシの厚みに対するブラシの厚みの減少量の比であってもよい。また、ブラシ摩耗量の替わりに、ブラシの厚みが摩耗した結果におけるブラシの厚みの残存量(以下、ブラシ厚み残存量と呼ぶ)であってもよい。なお、ブラシ厚み残存量の替わりに、ブラシを交換した直後のブラシの厚みに対するブラシ厚み残存量の比(以下、残存量比及ぶ)であってもよい。
【0044】
計算部17は、摺動抵抗Rまたはブラシ摩耗度を計算する。
【0045】
記憶部19は、摺動抵抗Rに対するブラシ摩耗量の対応表(以下、摺動摩耗対応表と呼ぶ)を記憶する。なお、ブラシ摩耗量の替わりに、ブラシ厚み残存量または、残存量比であってもよい。なお、記憶部19は、摺動摩耗対応表の代わりにブラシ摩耗度に対するブラシ摩耗量の対応表を記憶してもよい。
【0046】
警告出力部25は、計算部17で計算された摺動抵抗Rと、記憶部19に記憶された摺動摩耗対応表とに基づいて、ブラシ摩耗量を決定する。決定されたブラシ摩耗量は、警告出力部25から出力される。警告出力部25は、ブラシ摩耗量を所定の警告とともに、モニタまたは表示部15に出力する。なお、警告出力部25は、ブラシ摩耗量を、所定の警告とともにスピーカから音声出力させてもよい。
【0047】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、スリップリング81に対するブラシ82の摺動抵抗Rに基づいて、ブラシ82の交換または点検を促すための所定の警告を出力することが出来る。また、本X線コンピュータ断層撮影装置1によれば、スリップリング81に対するブラシ82の摺動抵抗Rに基づいて、ブラシの摩耗度および摩耗量を、所定の警告とともに出力することが出来る。これにより、X線コンピュータ断層撮影装置1によれば、スリップリング81およびブラシ82の点検交換作業を行う適切なタイミングを、操作者に知らせることができ、上記点検交換作業の効率が向上する。加えて、上記点検交換作業のコストを抑えることが出でき、上記点検交換作業のサービス性が向上する。さらに、ブラシ82の点検および交換が適切なタイミングで実施可能なため、スリップリング機構80を介した電力伝送に関する品質を高く保つことが出来る。
【0048】
(第2の実施形態)
第1の実施形態との相違は、回転フレーム73の回転数をカウントすることにより、カウントされた回転数が所定の回転数に達したとき、所定の警告を出力することにある。
【0049】
図7は、第2の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
X線コンピュータ断層撮影装置1は、第1の実施形態における構成要素に加えて、カウンタ18をさらに具備する。
【0050】
カウンタ18は、駆動部79におけるサーボモータ791からサーボアンプ793へ出力されたフィードバックパルスに基づいて、回転フレーム79の回転数をカウントする。
【0051】
記憶部19は、所定の回転数をさらに記憶する。所定の回転数とは、交換直後のブラシ82の厚みが、交換される時期におけるブラシ82の厚みまで摩耗されるまでの回転フレーム73の回転数である。すなわち、所定の回転数とは、ブラシ82が摩耗することにより、ブラシ82の交換時期に対応する回転するである。
【0052】
警告出力部25は、カウントされた回転数を所定の回転数と比較する。警告出力部25は、カウントされた回転数が所定の回転数に到達したことと、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したこととのうち少なくとも一方が達成されると、所定の警告をモニタまたはスピーカに出力する。
【0053】
(ブラシ摩耗警告出力機能)
ブラシ摩耗警告出力機能とは、カウントされた回転数が所定の回転数に到達したとき、または摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したとき、所定の警告を出力させる機能である。以下、ブラシ摩耗警告出力機能に関する処理(以下、ブラシ摩耗警告出力処理と呼ぶ)について説明する。
【0054】
本X線コンピュータ断層撮影装置1により、回転フレーム73が回転されると、カウンタ18により、回転フレーム73の回転数がカウントされる。カウントされた回転数は、所定の回転数と比較される。カウントされた回転数が所定の回転数に到達したことと、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したこととのうち少なくとも一方が達成されると、所定の警告が、警告出力部25からモニタまたはスピーカへ出力される。
【0055】
(第3の変形例)
第2の実施形態との相違は、ネットワークを介して本X線コンピュータ断層撮影装置1に接続されたRIS200とHIS201との少なくとも一方から受信されたX線コンピュータ断層撮影の検査予約数、または入力部21を介して入力されたX線コンピュータ断層撮影の検査予約数に基づいて、回転フレーム73の回転数を決定する。次いで、決定された回転数とカウンタでカウントされた回転数との和が、所定の回転数に到達したとき、所定の警告を出力することにある。
【0056】
RIS200は、放射線部門の業務を効率的に進めるコンピュータシステムである。具体的には、RIS200は、放射線部門に対する検査オーダの参照、検査実施情報の記録、会計情報の記録および伝送、フィルムなどの消耗品の在庫管理、各種統計処理を行うコンピュータシステムである。X線コンピュータ断層撮影の検査予約数が、X線コンピュータ断層撮影装置1を使用する検査の予約表に基づいて、放射線技師などによりRIS200に入力される。
【0057】
HIS201は、病院内の業務を効率的に行うためのコンピュータシステム全体を指し、医事会計システム、検査オーダシステム、薬剤システム、給食システム、病棟管理システムなどから構成される。HIS200は、医師の患者に対する診察に基づいて、X線コンピュータ断層撮影の指示箋を発行する。発行されたX線コンピュータ断層撮影の指示箋に基づいて、X線コンピュータ断層撮影が実施される。RIS200およびHIS201は、X線コンピュータ断層撮影に関する検査予約数を記憶する。なお、検査予約数は、入力部21を介して入力されてもよい。
【0058】
記憶部19は、RIS200およびHIS201に記憶された検査予約数を、インターフェース13を介して受信し、記憶する。なお、記憶部19は、入力部21を介して入力された検査予約数を記憶してもよい。記憶部19は、検査予約数に対する回転フレーム73の回転数の対応表(以下、予約回転数対応表と呼ぶ)を記憶する。
【0059】
計算部17は、記憶部19に記憶された検査予約数と予約回転数対応表とに基づいて、回転フレーム73の回転数(以下、予約回転数と呼ぶ)を決定する。計算部17は、決定された予約回転数と、カウンタによりカウントされた回転数との和(以下、合計回転数と呼ぶ)を計算する。
【0060】
警告出力部25は、計算された合計回転数を所定の回転数と比較する。警告出力部25は、カウントされた回転数が所定の回転数に到達したことと、摺動抵抗Rがブラシ82の摩耗により所定の値まで低下したこととのうち少なくとも一方が達成されると、所定の警告をモニタまたはスピーカに出力する。
【0061】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、カウントされた回転フレーム73の回転数に基づいて、ブラシ82の交換または点検を促すための所定の警告を出力することが出来る。また、本X線コンピュータ断層撮影装置1によれば、合計回転数に基づいて、ブラシ82の交換または点検を促すための所定の警告を出力することが出来る。これにより、X線コンピュータ断層撮影装置1によれば、スリップリング81およびブラシ82の点検交換作業を行う適切なタイミングを、ブラシが摩耗する前に、操作者に知らせることができ、上記点検交換作業の効率が向上する。加えて、上記点検交換作業のコストを抑えることが出でき、上記点検交換作業のサービス性が向上する。さらに、ブラシ82の点検および交換が適切なタイミングで実施可能なため、スリップリング機構80を介した電力伝送に関する品質を高く保つことが出来る。
【0062】
(第3の実施形態)
第1、2の実施形態との相違は、スリップリング81に対するブラシ82の摺動抵抗Rを、所定の範囲に位置させるために、ブラシ支持部83におけるアクチュエータ84を制御することにある。
【0063】
図8は、第3の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
計算部17は、第1の実施形態で説明した処理により摺動抵抗Rを計算する。計算部17は、計算した摺動抵抗Rを動作量決定部27に出力する。
【0064】
動作量決定部27は、計算された抵抗値に基づいて、ブラシ支持部の動作量を決定する。具値的には、動作量決定部27は、第1の閾値より小さい摺動抵抗Rおよび第2の閾値より大きい摺動抵抗Rに対する角度(以下、制御角度と呼ぶ)の抵抗角度対応表を、図示していないメモリに記憶する。制御角度は、アクチュエータ84の駆動範囲における角度である。第1の閾値より小さい摺動抵抗Rは、ブラシ82をスリップリング81に押し付ける力(以下、押圧力と呼ぶ)が最適な押圧力に比べて小さい場合に対応する。第2の閾値より大きい摺動抵抗Rは、押圧力が最適な押圧力に比べて大きい場合に対応する。なお、対面分離機構がブラシ支持部83と固定部との間に設けられている場合、固定部とブラシ支持部83との距離が上記制御角度の代わりに用いられる。
【0065】
図9は、摺動抵抗Rに対する制御角度の対応表の一例を、グラフで示した図である。図9によれば、摺動抵抗Rに応じて、動作量決定部27により制御角度が決定される。
【0066】
動作量決定部27は、図示していないメモリに記憶された抵抗角度対応表を読み出す。動作量決定部27は、計算部17から出力された摺動抵抗Rと、メモリから読み出した抵抗角度対応表とに基づいて、制御角度を決定する。
【0067】
制御部23は、固定部とブラシ支持部83との角度θが決定された制御角度となるように、ブラシ支持部83におけるアクチュエータ84を制御する。
【0068】
(摺動抵抗制御機能)
摺動抵抗制御機能とは、計算部17で計算された摺動抵抗Rと抵抗角度対応表とに基づいて制御角度を決定し、決定された制御角度となるようにブラシ支持部83におけるアクチュエータ84を制御させる機能である。以下、摺動抵抗制御機能に関する処理(以下、摺動抵抗制御処理と呼ぶ)について説明する。
【0069】
図10は、摺動抵抗制御処理の流れの一例を示す流れ図である。
回転フレーム73が、制御部23による制御のもとで、駆動部79により定速で回転される(ステップSb1)。定速での回転フレーム73の回転により、サーボアンプ793から接触回転トルクT1と分離回転トルクT2とが、計算部17に出力される。接触回転トルクT1と分離回転トルクT2とに基づいて、摺動抵抗Rが計算される(ステップSb2)。計算された摺動抵抗Rは、記憶部19に記憶された第1、第2の閾値と比較される。(ステップSb3)。摺動抵抗Rが第1の閾値以下であり、かつ第2の閾値以上である場合、摺動抵抗Rと抵抗角度対応表とに基づいて、制御角度が決定される(ステップSb4)。決定された制御角度となるように、ブラシ支持部83におけるアクチュエータ84が制御される。
【0070】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、計算された摺動抵抗Rと抵抗角度対応表とに基づいて制御角度を決定し、決定された制御角度となるようにブラシ支持部83におけるアクチュエータ84を制御することができる。これにより、X線コンピュータ断層撮影装置1によれば、スリップリング81に対するブラシ82の押圧力を最適化することができる。以上のことから、ブラシ82の押圧力を最適化できるため、スリップリング機構80を介した電力伝送に関する品質を高く保つことが出来る。
【0071】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0072】
1…X線コンピュータ断層撮影装置、5…高電圧発生部、7…ガントリ、11…再構成部、13…インターフェース、15…表示部、17…計算部、18…カウンタ、19…記憶部、21…入力部、23…制御部、25…警告出力部、27…動作量決定部、31…天板、71…X線管、73…回転リング、75…X線検出器、77…データ収集回路(DAS)、79…駆動部、80…スリップリング機構、81…スリップリング、82…ブラシ、83…ブラシ支持部、84…アクチュエータ、105…非接触データ伝送部、200…放射線部門情報管理システム(RIS)、201…病院情報システム(HIS)、715…X線の焦点、717…X線の放射範囲、719…撮影領域、791…サーボモータ、793…サーボアンプ
【特許請求の範囲】
【請求項1】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、
前記回転フレームを回転駆動させる駆動部と、
前記回転フレームに設けられたスリップリングと前記スリップリングに接触するブラシとを有するスリップリング機構と、
前記駆動部により発生された前記回転フレームの回転トルクに基づいて、前記ブラシと前記スリップリングとの接触による抵抗値を計算する計算部と、
前記計算された抵抗値が所定の値に到達したとき、所定の警告を出力する警告出力部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項2】
前記警告出力部は、前記所定の警告を表示させるモニタを有すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項3】
前記警告出力部は、前記所定の警告に対応する所定音を発生するスピーカを有すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項4】
前記スリップリングに対して前記ブラシを着脱可能に支持するブラシ支持部をさらに具備し、
前記計算部は、
前記スリップリングから前記ブラシを分離させた状態における前記回転フレームの回転トルクと、前記スリップリングに前記ブラシを接触させた状態における前記回転フレームの回転トルクとに基づいて、前記抵抗値を計算すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項5】
前記計算部は、前記抵抗値を用いてブラシの摩耗度の計算し、
前記警告出力部は、前記計算されたブラシの摩耗度を、前記所定の警告とともに出力すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項6】
前記抵抗値に対するブラシの摩耗量の対応表を記憶する記憶部をさらに具備し、
前記警告出力部は、前記抵抗値と前記対応表とに基づいて、ブラシの摩耗量を決定し、前記決定されたブラシの摩耗量を、前記所定の警告とともに出力すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項7】
前記回転フレームの回転数をカウントするカウンタをさらに具備し、
前記警告出力部は、前記カウントされた回転数が、所定の回転数に到達したとき、前記所定の警告を出力すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項8】
前記回転フレームを回転させることにより実行されるX線コンピュータ断層撮影に関する検査予約数を、放射線部門情報管理システムと病院情報システムとの少なくとも一方から、電子的通信回線を介して受信するためのインターフェースをさらに具備し、
前記計算部は、前記検査予約数に対応する前記回転フレームの回転数と、前記カウントされた回転数との和を計算し、
前記警告出力部は、前記計算された和が所定の回転数に到達したとき、前記所定の警告を出力すること、
を特徴とする請求項7に記載のX線コンピュータ断層撮影装置。
【請求項9】
前記スリップリングに対して前記ブラシを着脱可能に支持するブラシ支持部と、
前記抵抗値に基づいて、前記ブラシ支持部の動作量を決定する動作量決定部とをさらに具備し、
前記制御部は、
前記決定された動作量にわたって前記ブラシ支持部を動作させるために、前記ブラシ支持部を制御すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項10】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、
前記回転フレームを回転駆動させる駆動部と、
前記回転フレームに設けられたスリップリングと前記スリップリングに接触するブラシとを有するスリップリング機構と、
前記駆動部により発生された前記回転フレームの回転トルクに基づいて、前記ブラシと前記スリップリングとの接触による抵抗値を計算する計算部と、
前記スリップリングに対して前記ブラシを着脱可能に支持するブラシ支持部と、
前記抵抗値に基づいて、前記ブラシ支持部の動作量を決定する動作量決定部と、
前記決定された動作量にわたって前記ブラシ支持部を動作させるために、前記ブラシ支持部を制御する制御部と、
を特徴とするX線コンピュータ断層撮影装置。
【請求項11】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載した回転フレームを回転し、
前記回転フレームの回転トルクに基づいて、前記回転フレームに取り付けられたスリップリングと前記スリップリングに接触させたブラシとの抵抗値を計算し、
前記計算された抵抗値が所定の値に到達したとき、所定の警告を出力すること、
を具備することを特徴とするブラシ交換タイミング出力方法。
【請求項1】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、
前記回転フレームを回転駆動させる駆動部と、
前記回転フレームに設けられたスリップリングと前記スリップリングに接触するブラシとを有するスリップリング機構と、
前記駆動部により発生された前記回転フレームの回転トルクに基づいて、前記ブラシと前記スリップリングとの接触による抵抗値を計算する計算部と、
前記計算された抵抗値が所定の値に到達したとき、所定の警告を出力する警告出力部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項2】
前記警告出力部は、前記所定の警告を表示させるモニタを有すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項3】
前記警告出力部は、前記所定の警告に対応する所定音を発生するスピーカを有すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項4】
前記スリップリングに対して前記ブラシを着脱可能に支持するブラシ支持部をさらに具備し、
前記計算部は、
前記スリップリングから前記ブラシを分離させた状態における前記回転フレームの回転トルクと、前記スリップリングに前記ブラシを接触させた状態における前記回転フレームの回転トルクとに基づいて、前記抵抗値を計算すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項5】
前記計算部は、前記抵抗値を用いてブラシの摩耗度の計算し、
前記警告出力部は、前記計算されたブラシの摩耗度を、前記所定の警告とともに出力すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項6】
前記抵抗値に対するブラシの摩耗量の対応表を記憶する記憶部をさらに具備し、
前記警告出力部は、前記抵抗値と前記対応表とに基づいて、ブラシの摩耗量を決定し、前記決定されたブラシの摩耗量を、前記所定の警告とともに出力すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項7】
前記回転フレームの回転数をカウントするカウンタをさらに具備し、
前記警告出力部は、前記カウントされた回転数が、所定の回転数に到達したとき、前記所定の警告を出力すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項8】
前記回転フレームを回転させることにより実行されるX線コンピュータ断層撮影に関する検査予約数を、放射線部門情報管理システムと病院情報システムとの少なくとも一方から、電子的通信回線を介して受信するためのインターフェースをさらに具備し、
前記計算部は、前記検査予約数に対応する前記回転フレームの回転数と、前記カウントされた回転数との和を計算し、
前記警告出力部は、前記計算された和が所定の回転数に到達したとき、前記所定の警告を出力すること、
を特徴とする請求項7に記載のX線コンピュータ断層撮影装置。
【請求項9】
前記スリップリングに対して前記ブラシを着脱可能に支持するブラシ支持部と、
前記抵抗値に基づいて、前記ブラシ支持部の動作量を決定する動作量決定部とをさらに具備し、
前記制御部は、
前記決定された動作量にわたって前記ブラシ支持部を動作させるために、前記ブラシ支持部を制御すること、
を特徴とする請求項1に記載のX線コンピュータ断層撮影装置。
【請求項10】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載し、回転自在に支持される回転フレームと、
前記回転フレームを回転駆動させる駆動部と、
前記回転フレームに設けられたスリップリングと前記スリップリングに接触するブラシとを有するスリップリング機構と、
前記駆動部により発生された前記回転フレームの回転トルクに基づいて、前記ブラシと前記スリップリングとの接触による抵抗値を計算する計算部と、
前記スリップリングに対して前記ブラシを着脱可能に支持するブラシ支持部と、
前記抵抗値に基づいて、前記ブラシ支持部の動作量を決定する動作量決定部と、
前記決定された動作量にわたって前記ブラシ支持部を動作させるために、前記ブラシ支持部を制御する制御部と、
を特徴とするX線コンピュータ断層撮影装置。
【請求項11】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを搭載した回転フレームを回転し、
前記回転フレームの回転トルクに基づいて、前記回転フレームに取り付けられたスリップリングと前記スリップリングに接触させたブラシとの抵抗値を計算し、
前記計算された抵抗値が所定の値に到達したとき、所定の警告を出力すること、
を具備することを特徴とするブラシ交換タイミング出力方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−106901(P2013−106901A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256329(P2011−256329)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]