
X線回折装置
【課題】回折環の形状を短時間で精度良く検出できる、安価なX線回折装置を提供する。
【解決手段】測定対象物OBにX線を照射するX線出射器13、測定対象物OBにて回折したX線を受光して回折環を記録するイメージングプレート28を固定するテーブル27及びレーザ光をイメージングプレート28に照射して、回折環の形状を読み取るレーザ検出装置PUHを設ける。テーブル27の中心に、X線を通過させる貫通孔を設ける。回折環を撮像した後、スピンドルモータ24及びフィードモータ18によって、テーブル27を回転させるとともにイメージングプレート28の受光面に平行に移動させた状態で、レーザ検出装置PUHによって、イメージングプレート28にレーザ光を照射して、イメージングプレート28が発する光の強度が極大となるときのレーザ照射位置を取得する。
【解決手段】測定対象物OBにX線を照射するX線出射器13、測定対象物OBにて回折したX線を受光して回折環を記録するイメージングプレート28を固定するテーブル27及びレーザ光をイメージングプレート28に照射して、回折環の形状を読み取るレーザ検出装置PUHを設ける。テーブル27の中心に、X線を通過させる貫通孔を設ける。回折環を撮像した後、スピンドルモータ24及びフィードモータ18によって、テーブル27を回転させるとともにイメージングプレート28の受光面に平行に移動させた状態で、レーザ検出装置PUHによって、イメージングプレート28にレーザ光を照射して、イメージングプレート28が発する光の強度が極大となるときのレーザ照射位置を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象物にX線を照射し、測定対象物にて回折したX線によりイメージングプレートの表面に形成された回折環の形状に基づいて、測定対象物の特性を評価するX線回折装置に関する。
【背景技術】
【0002】
従来から、例えば下記特許文献1に示されているように、測定対象物の残留応力を測定するX線回折装置は知られている。このX線回折装置においては、測定対象物に対し、X線を所定の角度で照射し、測定対象物にて回折したX線(以下、回折X線という)を、感光性を有するイメージングプレートで受光し、イメージングプレートに形成された環状のX線回折像(以下、回折環という)の形状を分析するcosα法により、測定対象物の残留応力を算出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−241308号公報
【発明の概要】
【0004】
上記従来のX線回折装置は、測定対象物にX線を照射してイメージングプレートに回折環を形成させる照射装置と、イメージングプレートに形成された回折環の形状を読み取る読み取り装置から構成されている。すなわち、照射装置によって、イメージングプレートに回折環を形成した後、イメージングプレートを取り外して、読み取り装置にセットする必要があった。また、測定ごとにイメージングプレートの取り付け位置が微妙にずれるので、測定ごとに測定対象物からの回折X線による回折環の中心を求める必要があった。具体的には、測定対象物に鉄粉末を付着させた状態でX線を照射し、この鉄粉末にて回折した回折X線による回折環をイメージングプレートに形成させて、この回折環の中心を求める必要があった。このように、測定に手間がかかっていた。
【0005】
また、上記特許文献1には、イメージングプレートに代えてX線CCDを用いたX線回折装置も記載されている。この場合は、イメージングプレートを読み取り装置にセットする手間を省くことができる。また、この場合、一度、測定対象物に鉄粉末を付着させ、鉄粉末からの回折X線による回折環の中心を取得すれば、以降の測定においては、前記取得した中心を測定対象物からの回折X線による回折環の中心として用いることができる。すなわち、測定ごとに、回折環の中心を取得する必要が無い。しかし、回折X線を受光する可能性がある範囲は広いので、受光面積の広いX線CCDが必要であり、装置のコストが高くなるという問題がある。また、イメージングプレートのダイナミックレンジに比べて、X線CCDのダイナミックレンジは小さいので、X線CCDを用いた場合、回折環の半径方向に沿う回折X線の強度のピーク位置を検出するのが困難であるという問題があった。
【0006】
本発明は上記問題に対処するためになされたもので、その目的は、回折環の形状を短時間で精度良く検出できる、安価なX線回折装置を提供することにある。なお、下記本発明の各構成要件の記載においては、本発明の理解を容易にするために、後述する実施形態の対応箇所の符号を括弧内に記載しているが、本発明の各構成要件は、実施形態の符号によって示された対応箇所の構成に限定解釈されるべきものではない。
【0007】
上記目的を達成するために、本発明の特徴は、測定対象物(OB)に向けてX線を出射するX線出射器(13)と、中央にX線を通過させる貫通孔が形成されたテーブル(27)と、テーブルに固定されていて、測定対象物にて回折したX線の回折光を受光する受光面を有し、回折光の像である回折環を記録する回折光受光器(28)と、回折光受光器の受光面にレーザ光を照射するとともに、レーザ光の照射によって回折光受光器から出射された光の強度を検出するレーザ検出装置(PUH)と、テーブルを、前記貫通孔の中心軸回りに回転させる回転手段(24)と、テーブルを、回折光受光器の受光面に平行な方向に、レーザ検出装置に対して相対的に移動させる移動手段(18)と、回転手段によってテーブルが回転され、かつ移動手段によってテーブルが移動されている状態で、レーザ検出装置によって繰り返し検出された光の強度を、それぞれの光の強度の検出時におけるテーブルの回転角度及びレーザ検出装置に対するテーブルの相対位置に関連付けて複数の読み取りデータとしてそれぞれ記憶するデータ読み取り手段(S208,S216,S226)と、前記記憶した複数の読み取りデータを用いて回折環の形状を検出する回折環形状検出手段(S414)を備えたことにある。
【0008】
この場合、テーブルの回転角度を検出する回転角度検出手段(24a)と、レーザ検出装置に対するテーブルの相対位置を検出する位置検出手段(18a)とを備え、データ読み取り手段は、回転角度検出手段によって検出したテーブルの回転角度が所定の角度になるごとに、レーザ検出装置によって検出した光の強度及び位置検出手段によって検出したレーザ検出装置に対するテーブルの相対位置を1組の読み取りデータとして記憶するとよい。
【0009】
また、この場合、テーブルの回転角度を検出する回転角度検出手段と、レーザ検出装置に対するテーブルの相対位置を検出する位置検出手段とを備え、データ読み取り手段は、位置検出手段によって検出したレーザ検出装置に対するテーブルの相対位置が所定の位置になるごとに、レーザ検出装置によって検出した光の強度及び回転角度検出手段によって検出したテーブルの回転角度を1組の読み取りデータとして記憶してもよい。
【0010】
また、この場合、テーブルの回転角度を検出する回転角度検出手段と、レーザ検出装置に対するテーブルの相対位置を検出する位置検出手段とを備え、データ読み取り手段は、一定の時間間隔でレーザ検出装置によって検出した光の強度、回転角度検出手段によって検出したテーブルの回転角度、及び位置検出手段によって検出したレーザ検出装置に対するテーブルの相対位置を1組の読み取りデータとして記憶してもよい。
【0011】
また、この場合、レーザ検出装置は、回折光受光器の受光面に照射するレーザ光を出射するレーザ出射器(33)と、レーザ出射手段から出射されたレーザ光を集光する対物レンズ(39)と、対物レンズをレーザ光の光軸方向に移動させるアクチュエータ(40)と、受光した光の強度及び形状に応じた受光信号を出力するフォトディテクタ(43)と、回折光受光器の受光面のレーザ光照射位置から入射した光をフォトディテクタに導くとともに、レーザ光の焦点と前記回折光受光器の受光面とのずれに応じて、フォトディテクタの受光面に形成される受光した光の形状を異ならせる光学部品(42)とを備え、データ読み取り手段は、フォトディテクタから出力された受光信号に基づいて、対物レンズによって集光されたレーザ光の焦点と回折光受光器の受光面とのずれに相当するエラー信号を生成し、エラー信号に基づいて、レーザ光の焦点と回折光受光器の受光面とが一致するようにアクチュエータを駆動する駆動手段(45,46,47)を備えるとよい。
【0012】
上記のように構成したX線回折装置によれば、回折光受光器として蛍光体を塗布したフィルムを採用できる。したがって、X線CCDを用いて回折光を受光する装置に比べてコストを下げることができ、回折X線の強度のピーク位置を精度良く検出できる。また、回折環を撮像した回折光受光器をテーブルから取り外して、別途用意された読み取り装置に取り付ける必要が無い。さらに、回折光受光器を取り外さないので、一度、回折環の中心を検出すれば、その後の測定においては、回折環の中心を検出する必要が無い。したがって、回折環の形状を短時間で精度良く検出できる。
【0013】
また、本発明の他の特徴は、X線出射器から出射されて測定対象物にて反射した反射X線を受光して、回折光受光器から測定対象物までの距離に関連した受光信号を出力する反射X線受光器(31,32)をさらに備え、データ読み取り手段は、受光信号に基づいて、レーザ検出装置によって検出された光の強度を前記読み取りデータとして記憶し始めるときのレーザ検出装置に対するテーブルの相対位置を設定することにある。
【0014】
上記のように構成したX線回折装置においては、測定対象物と回折光受光器との間の距離に関連する信号を用いて、回折光受光器の受光面に形成された回折環の半径を予測することができる。すなわち、測定対象物の表面におけるX線の回折角度は、その測定対象物の材質によって決まるので、回折光受光器の受光面に形成された回折環の半径は、測定対象物と回折光受光器との間の距離に比例する。したがって、予め記憶された測定対象物の残留応力が「0」である場合の回折角、及び回折光受光器から測定対象物までの距離に関連する信号を用いて、測定対象物の残留応力が「0」である場合の回折環の半径を算出することができる。そして、撮像した回折環の半径が回折環基準半径Rからずれる可能性のある所定の領域についてのみ、レーザ検出装置によって光の強度を検出して、読み取りデータとして記憶できる。これにより、測定時間を短縮できる。
【0015】
また、本発明の他の特徴は、回折環形状検出手段は、テーブルの所定の回転角度ごとに、回折光受光器の受光面の半径方向の位置とレーザ検出装置によって検出した光の強度との関係を表した受光曲線における、前記検出した光の強度のピークの有無を検出し、ピークを有する受光曲線が所定数以上存在するとき、データ読み取り手段による前記検出した光の強度の読み取りデータとしての記憶を終了させることにある。
【0016】
上記のように構成したX線回折装置によれば、回折環の形状を検出するのに十分なデータを記憶した時点で、データ読み取り手段の作動を停止させることができるので、測定時間を短縮することができる。
【0017】
また、本発明の他の特徴は、回折環形状検出手段は、レーザ検出装置によって検出された光の強度が所定の基準値より大きいとき、光の強度に対応した読み取りデータを回折環の形状を検出するためのデータとして採用し、レーザ検出装置によって検出された光の強度が所定の基準値以下であるとき、光の強度に対応した読み取りデータを回折環の形状を検出するためのデータとして採用しないことにある。
【0018】
上記のように構成したX線回折装置によれば、回折環の形状を表すデータとして不必要と考えられる読み取りデータを採用しないので、データ処理の際のデータ数を削減でき、測定時間を短縮できる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態に係るX線回折装置の全体概略図である。
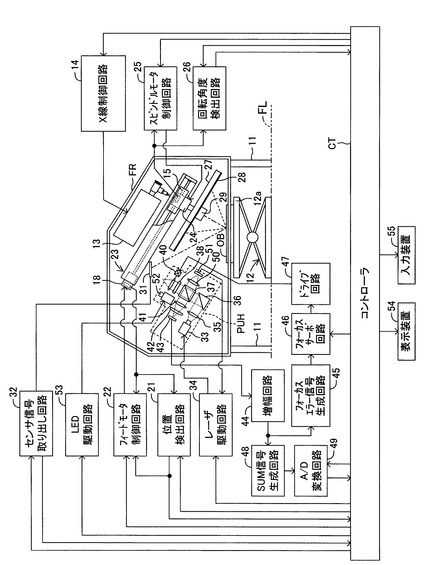
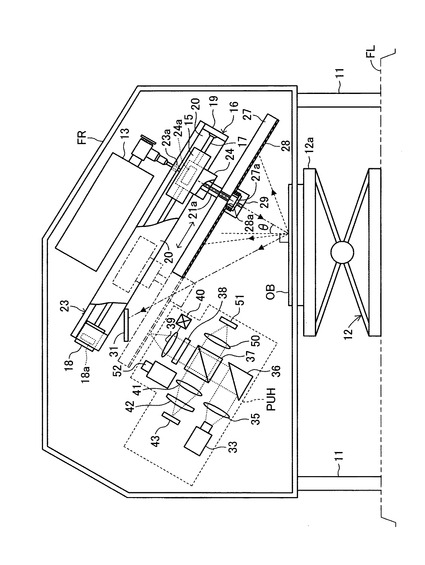
【図2】図1のX線回折装置の本体部分を拡大した拡大図である。
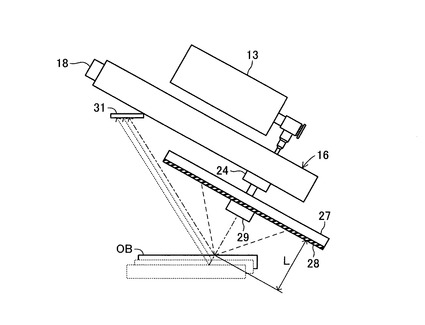
【図3】イメージングプレートから測定対象物までの距離と、受光センサにおける受光位置との関係を説明する説明図である。
【図4】図1のコントローラが実行する回折環撮像処理のフローチャートである。
【図5】読み取りポイントの軌跡を説明する説明図である。
【図6A】図1のコントローラが実行する回折環読み取り処理の前半部分のフローチャートである。
【図6B】図1のコントローラが実行する回折環読み取り処理の後半部分のフローチャートである。
【図7】読み取り開始位置を説明する説明図である。
【図8】図1のコントローラが実行する回折環消去処理のフローチャートである。
【図9A】消去開始位置を説明する説明図である。
【図9B】消去終了位置を説明する説明図である。
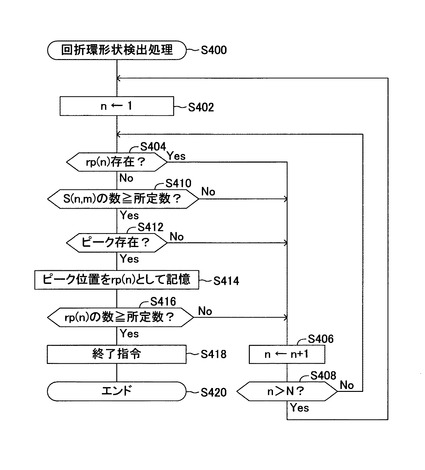
【図10】図1のコントローラが実行する回折環形状検出処理を示すフローチャートである。
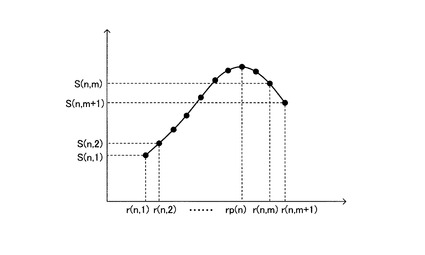
【図11】信号強度のピークを説明するために、受光曲線の一例を示したグラフである。
【発明を実施するための形態】
【0020】
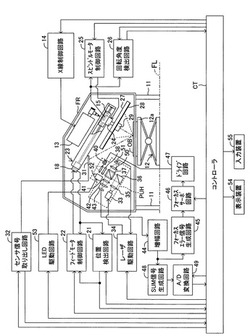
本発明の一実施形態に係るX線回折装置の構成について図1及び図2を用いて説明する。このX線回折装置は、X線を測定対象物OBに照射するとともに、同照射による測定対象物OBからの回折X線による回折環の形状を読み取り、読み取った回折環の形状に基づいて、測定対象物OBの特性を評価する。このX線回折装置は、箱状に形成されたフレームFRを有し、フレームFRの底面の角部から下方へ支持脚11が延設されている。すなわち、フレームFRの底面は、X線回折装置の設置面FLよりも上方に位置する。フレームFRの下方には、昇降機12が設けられている。昇降機12は、測定対象物OBを固定するための昇降ステージ12aを有する。昇降ステージ12aは、上下に昇降可能となっている。フレームFRの底面であって、昇降機12の上方に位置する部分には開口部が設けられていて、昇降ステージ12aを上昇させることにより、固定した測定対象物OBをフレームFRの内部へ搬入することができる。
【0021】
フレームFR内の上部には、X線制御回路14によって制御されて、X線を出射するX線出射器13が固定されている。X線出射器13から出射されたX線の光軸と、測定対象物OBの法線とが所定の角度θ(例えば、30°)をなすように、X線出射器13の出射口の向きが設定されている。
【0022】
X線制御回路14は、後述するコントローラCTによって制御され、X線出射器13から一定の強度のX線が出射されるように、X線出射器13に供給する駆動電流及び駆動電圧を制御する。また、X線出射器13は、図示しない冷却装置を備えていて、X線制御回路14は、この冷却装置に供給する駆動信号も制御する。これにより、X線出射器13の温度が一定に保たれる。
【0023】
X線出射器13の下方には、移動ステージ15が設けられている。移動ステージ15は、ステージ送り装置16により、X線出射器13から出射されたX線の光軸に垂直な方向に移動可能となっている。ステージ送り装置16は、移動ステージ15に固定された図示しないナットに螺合するスクリューロッド17と、スクリューロッド17を回転させるフィードモータ18とを備えている。スクリューロッド17は、X線出射器13から出射されたX線の光軸に垂直な方向に延設されている。そして、スクリューロッド17の一端部が、フレームFRに固定されたフィードモータ18の出力軸に連結され、他端部が、フレームFRに固定された軸受部19に回転可能に支持される。また、移動ステージ15は、それぞれフレームFRに固定された、対向する1対の板状のガイド20,20により挟まれていて、スクリューロッド17の軸線方向に沿って移動可能となっている。すなわち、フィードモータ18を正転又は逆転駆動すると、フィードモータ18の回転運動が移動ステージ15の直線運動に変換される。フィードモータ18内には、エンコーダ18aが組み込まれている。エンコーダ18aは、フィードモータ18が所定の微小回転角度だけ回転する度に、ハイレベルとローレベルとに交互に切り替わるパルス列信号を位置検出回路21及びフィードモータ制御回路22へ出力する。
【0024】
位置検出回路21及びフィードモータ制御回路22は、コントローラCTからの指令により作動開始する。測定開始直後において、フィードモータ制御回路22は、フィードモータ18を駆動して移動ステージ15をフィードモータ18側へ移動させる。位置検出回路21は、エンコーダ18aから出力されるパルス信号が入力されなくなると移動ステージ15が移動限界位置に達したことを表す信号をフィードモータ制御回路22に出力し、カウント値を「0」に設定する。フィードモータ制御回路22は、位置検出回路21から移動限界位置に達したことを表す信号を入力するとフィードモータ18への駆動信号の出力を停止する。上記の移動限界位置を移動ステージ15の原点位置とする。
【0025】
フィードモータ制御回路22は、コントローラCTから移動ステージ15の移動先の位置を表す設定値を入力すると、その設定値に応じてフィードモータ18を正転又は逆転駆動する。位置検出回路21は、エンコーダ18aが出力するパルス信号のパルス数をカウントする。そして、カウントしたパルス数を用いて移動ステージ15の現在の位置を計算し、コントローラCT及びフィードモータ制御回路22に出力する。フィードモータ制御回路22は、位置検出回路21から入力した移動ステージ15の現在の位置が、コントローラCTから入力した移動先の位置と一致するまでフィードモータ18を駆動する。
【0026】
また、フィードモータ制御回路22は、移動ステージ15の移動速度を表す設定値をコントローラCTから入力する。そして、エンコーダ18aから入力したパルス信号の単位時間当たりのパルス数を用いて、移動ステージ15の移動速度を計算し、前記計算した移動ステージ15の移動速度がコントローラCTから入力した移動速度になるようにフィードモータ18を駆動する。
【0027】
一対のガイド20,20の上端は、板状の上壁23によって連結されている。上壁23には、貫通孔23aが設けられていて、貫通孔23aには、X線出射器13の出射口の先端部が挿入されている。なお、X線出射器13の出射口の先端が移動ステージ15に当接しないように、X線出射器13及び移動ステージ15の位置が設定されている。
【0028】
また、移動ステージ15には、スピンドルモータ24が組み付けられている。スピンドルモータ24内には、エンコーダ18aと同様のエンコーダ24aが組み込まれている。すなわち、エンコーダ24aは、スピンドルモータ24が所定の微小回転角度だけ回転する度に、ハイレベルとローレベルとに交互に切り替わるパルス列信号を、スピンドルモータ制御回路25及び回転角度検出回路26へ出力する。さらに、エンコーダ24aは、スピンドルモータ24が1回転するごとに、所定の短い期間だけローレベルからハイレベルに切り替わるインデックス信号を、コントローラCT及び回転角度検出回路26へ出力する。
【0029】
スピンドルモータ制御回路25及び回転角度検出回路26は、コントローラCTからの指令により作動開始する。スピンドルモータ制御回路25は、コントローラCTから、スピンドルモータ24の回転速度を表す設定値を入力する。そして、エンコーダ24aから入力したパルス信号の単位時間当たりのパルス数を用いてスピンドルモータ24の回転速度を計算し、計算した回転速度がコントローラCTから入力した回転速度になるように、駆動信号をスピンドルモータ24に供給する。回転角度検出回路26は、エンコーダ24aから出力されたパルス列信号のパルス数をカウントし、そのカウント値を用いてスピンドルモータ24の回転角度を計算して、コントローラCTに出力する。そして、回転角度検出回路26は、エンコーダ24aから出力されたインデックス信号を入力すると、カウント値を「0」に設定する。すなわち、インデックス信号を入力した位置が回転角度0°の位置である。
【0030】
スピンドルモータ24の出力軸の先端部には、円板状のテーブル27が固定されている。テーブル27の中心軸と、スピンドルモータ24の出力軸の中心軸とは一致している。テーブル27は、下面中央部から下方へ突出した突出部27aを有していて、突出部27aの外周面には、ねじ山が形成されている。突出部27aの中心軸は、スピンドルモータ24の出力軸の中心軸と一致している。テーブル27の下面には、イメージングプレート28が組み付けられている。イメージングプレート28は、表面に蛍光体が塗布された円形のプラスチックフィルムである。イメージングプレート28の中心部には、貫通孔28aが設けられていて、この貫通孔28aに突出部27aを通し、突出部27aにナット状の固定具29をねじ込むことにより、イメージングプレート28が、固定具29とテーブル27の間に挟まれて固定される。固定具29は、円筒状の部材で、内周面に、突出部27aのねじ山に対応するねじ山が形成されている。イメージングプレート28は、フィードモータ18によって駆動されて、移動ステージ15、スピンドルモータ24及びテーブル27と共に原点位置から回折環を撮像する回折環撮像位置へ移動する。また、イメージングプレート28は、スピンドルモータ24によって駆動されて回転しながら、フィードモータ18によって駆動されて、移動ステージ15、スピンドルモータ24及びテーブル27と共に撮像した回折環を読み取る回折環読み取り領域内、回折環を消去する回折環消去領域内を移動する。
【0031】
また、移動ステージ15、スピンドルモータ24の出力軸、テーブル27及び固定具29には、X線出射器13から出射されたX線を通過させる貫通孔がそれぞれ設けられている。これらの貫通孔の中心軸と、テーブル27の回転軸は一致している。すなわち、これらの貫通孔の中心軸と、X線出射器13から出射されるX線の光軸とが一致するとき、X線が測定対象物OBに照射される。このように、X線を測定対象物OBに照射するときのイメージングプレート28の位置が、回折環撮像位置である。
【0032】
フィードモータ18の下方には、測定対象物OBにて反射したX線を受光する複数の受光素子からなる受光センサ31(例えば、X線CCD)が組み付けられている。受光センサ31は、測定対象物OB及びイメージングプレート28からフィードモータ18側に十分離れている。これにより、イメージングプレート28が回折環撮像位置にあるとき、受光センサ31は、測定対象物OBにて反射したX線を直接受光できる。受光センサ31の受光面は、測定対象物OBの上面と平行である。受光センサ31の受光面におけるX線の受光位置は、図3に示すように、測定対象物OBの高さに対応している。言い換えれば、イメージングプレート28と測定対象物OBとの距離Lに対応している。受光センサ31は、それぞれの受光素子が受光した受光信号をセンサ信号取り出し回路32へ出力する。
【0033】
センサ信号取り出し回路32は、コントローラCTからの指令により作動開始し、受光センサ31から入力した受光信号を用いて受光センサ31の受光面における受光信号のピーク位置を算出して受光位置を表す受光位置信号としてコントローラCTへ出力する。
【0034】
また、受光センサ31の下方には、レーザ検出装置PUHが組み付けられている。レーザ検出装置PUHは、回折環を撮像したイメージングプレート28にレーザ光を照射して、イメージングプレート28から入射した光の強度を検出する。レーザ検出装置PUHは、測定対象物OB及びイメージングプレート28からフィードモータ18側に十分離れている。すなわち、イメージングプレート28が回折環撮像位置にあるとき、測定対象物OBにて回折したX線がレーザ検出装置PUHによって遮られないようになっている。レーザ検出装置PUHは、レーザ光源33と、コリメートレンズ35、反射鏡36、偏光ビームスプリッタ37、1/4波長板38及び対物レンズ39を備えている。
【0035】
レーザ光源33は、レーザ駆動回路34によって制御されて、イメージングプレート28に照射するレーザ光を出射する。
【0036】
レーザ駆動回路34は、コントローラCTによって制御され、レーザ光源33から所定の強度のレーザ光が出射されるように、駆動信号を制御して供給する。レーザ駆動回路34は、後述するフォトディテクタ51から出力された受光信号を入力して、受光信号の強度が所定の強度になるようにレーザ光源33に出力する駆動信号を制御する。これにより、イメージングプレート28に照射されるレーザ光の強度が一定に維持される。
【0037】
コリメートレンズ35は、レーザ光源33から出射されたレーザ光を平行光に変換する。反射鏡36は、コリメートレンズ35にて平行光に変換されたレーザ光を、偏光ビームスプリッタ37に向けて反射する。偏光ビームスプリッタ37は、反射鏡36から入射したレーザ光の大半(例えば、95%)をそのまま透過させる。1/4波長板38は、偏光ビームスプリッタ37から入射したレーザ光を直線偏光から円偏光に変換する。対物レンズ39は、1/4波長板38から入射したレーザ光をイメージングプレート28の表面に集光させる。
【0038】
対物レンズ39には、フォーカスアクチュエータ40が組み付けられている。フォーカスアクチュエータ40は、対物レンズ39をレーザ光の光軸方向に移動させるアクチュエータである。なお、対物レンズ39は、フォーカスアクチュエータ40が通電されていないときに、その可動範囲の中心に位置する。
【0039】
対物レンズ39によって集光されたレーザ光を、イメージングプレート28の表面であって、回折環が撮像されている部分に照射すると、輝尽発光(Photo−Stimulated Luminesence)現象が生じる。すなわち、回折環を撮像した後、イメージングプレート28にレーザ光を照射すると、イメージングプレート28の蛍光体が回折X線の強度に応じた光であって、レーザ光の波長よりも波長が短い光を発する。イメージングプレート28に照射されて反射したレーザ光の反射光及び蛍光体から発せられた光は、対物レンズ39及び1/4波長板38を通過して、偏光ビームスプリッタ37にて反射する。偏光ビームスプリッタ37の反射方向には、集光レンズ41、シリンドリカルレンズ42及びフォトディテクタ43が設けられている。集光レンズ41は、偏光ビームスプリッタ37から入射した光を、シリンドリカルレンズ42に集光する。シリンドリカルレンズ42は、透過した光に非点収差を生じさせる。フォトディテクタ43は、分割線で区切られた4つの同一正方形状の受光素子からなる4分割受光素子によって構成されており、時計回りに配置された受光領域A,B,C,Dに入射した光の強度に比例した大きさの検出信号を受光信号(a,b,c,d)として、増幅回路44へ出力する。
【0040】
増幅回路44は、フォトディテクタ43から出力された受光信号(a,b,c,d)をそれぞれ同じ増幅率で増幅して受光信号(a’,b’,c’,d’)を生成して、フォーカスエラー信号生成回路45及びSUM信号生成回路48へ出力する。
【0041】
本実施形態においては、非点収差法によるフォーカスサーボ制御を用いる。フォーカスエラー信号生成回路45は、増幅された受光信号(a’,b’,c’,d’)を用いて、演算によりフォーカスエラー信号を生成する。すなわち、フォーカスエラー信号生成回路45は、(a’+c’)−(b’+d’)の演算を行い、この演算結果をフォーカスエラー信号としてフォーカスサーボ回路46へ出力する。フォーカスエラー信号(a’+c’)−(b’+d’)は、レーザ光の焦点位置のイメージングプレート28の表面からのずれ量を表している。
【0042】
フォーカスサーボ回路46は、コントローラCTにより制御され、フォーカスエラー信号に基づいて、フォーカスサーボ信号を生成してドライブ回路47に出力する。ドライブ回路47は、このフォーカスサーボ信号に応じてフォーカスアクチュエータ40を駆動して、対物レンズ39をレーザ光の光軸方向に変位させる。この場合、フォーカスエラー信号(a’+c’)−(b’+d’)の値が常に一定値(例えば、ゼロ)となるようにフォーカスサーボ信号を生成することにより、イメージングプレート28の表面にレーザ光を集光させ続けることができる。
【0043】
SUM信号生成回路48は、受光信号(a’,b’,c’,d’)を合算してSUM信号(a’+b’+c’+d’)を生成し、A/D変換回路49に出力する。SUM信号の強度は、イメージングプレート28にて反射したレーザ光の強度と輝尽発光により発生した光の強度を合わせた強度に相当するが、イメージングプレート28にて反射したレーザ光の強度はほぼ一定であるので、SUM信号の強度は、輝尽発光により発生した光の強度に相当する。すなわち、SUM信号の強度は、イメージングプレート28に入射した回折X線の強度に相当する。
【0044】
A/D変換回路49は、コントローラCTによって制御され、SUM信号生成回路48からSUM信号を入力し、入力したSUM信号の瞬時値をデジタルデータに変換してコントローラCTに出力する。
【0045】
また、レーザ検出装置PUHは、集光レンズ50及びフォトディテクタ51を備えている。集光レンズ50は、レーザ光源33から出射されたレーザ光の一部であって、偏光ビームスプリッタ37を透過せずに反射したレーザ光をフォトディテクタ51の受光面に集光する。フォトディテクタ51は、受光面に集光された光の強度に応じた受光信号を出力する受光素子である。従って、フォトディテクタ51は、レーザ光源33が出射したレーザ光の強度に対応した受光信号をレーザ駆動回路34へ出力する。
【0046】
また、対物レンズ39に隣接して、LED52が設けられている。LED52は、LED駆動回路53によって制御されて、可視光を発して、イメージングプレート28に撮像された回折環を消去する。
【0047】
LED駆動回路53は、コントローラCTによって制御され、LED52に、所定の強度の可視光を発生させるための駆動信号を供給する。
【0048】
コントローラCTは、CPU、ROM、RAMを備えたマイクロコンピュータを主要部とした電子制御装置である。コントローラCTには、作業者が各種パラメータ、作業指示などを入力するための入力装置54と、作業者に対して各種の設定状況、作動状況、測定結果などを視覚的に知らせるための表示装置55とが接続されている。コントローラCTは、A/D変換回路49から出力されたSUM信号のデジタルデータを処理することによりイメージングプレート28の蛍光体が発した光の強度を検出する。
【0049】
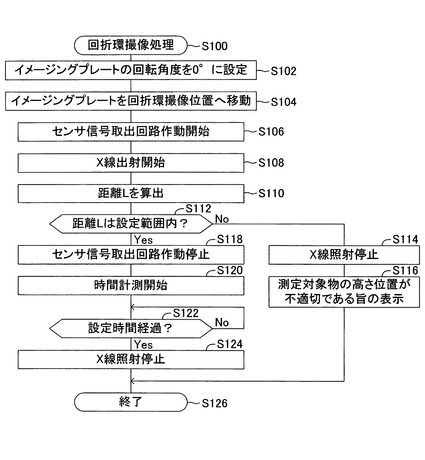
つぎに、上記のように構成したX線回折装置を用いて、測定対象物OBの残留応力を測定する手順について説明する。まず、作業者は、測定対象物OBを昇降機12の昇降ステージ12aに取り付け、昇降ステージ12aを上昇させて、測定対象物OBをフレームFR内にセットする。そして、作業者が、入力装置55を用いて測定対象物OBの材質を入力し、測定開始を指示すると、コントローラCTは、回折環撮像プログラムを実行する。コントローラCTは、図4に示すように、ステップS100にて、回折環撮像処理を開始すると、ステップS102にてイメージングプレート28を低速回転させ、エンコーダ24aからインデックス信号を入力すると、イメージングプレート28の回転を停止させる。これにより、測定開始時において、イメージングプレート28の回転角度が0°に設定される。なお、回折環撮像処理の以降のステップにおいては、イメージングプレート28を回転させない。つぎに、ステップS104にて、イメージングプレート28を回折環撮像位置へ移動させる。
【0050】
つぎに、コントローラCTは、ステップS106にて、センサ信号取り出し回路32の作動を開始させる。つぎに、ステップS108にて、X線の出射を開始させる。これにより、X線が測定対象物OBに照射され、測定対象物OBの表面にて反射したX線が受光センサ31に受光される。つぎに、ステップS110にて、センサ信号取り出し回路32から、受光位置信号を入力し、前記入力した受光位置信号を用いてイメージングプレート28と測定対象物OBとの距離Lを算出する。そして、ステップS112にて、前記算出した距離Lが所定の基準範囲内にあるか否か判定する。距離Lが基準範囲外であれば、「No」と判定して、ステップS114にて、測定対象物OBへのX線の照射を停止させる。
【0051】
そして、ステップS116にて、表示装置54に、測定対象物OBの高さ方向の位置が不適切である旨を表示するとともに、昇降機12の昇降ステージ12aの高さ調整に関する情報を表示する。すなわち、昇降ステージ12aを、どの程度上昇又は下降させるべきかを表示する。そして、後述のステップS126にて、回折環撮像処理を終了する。この場合、作業者は、昇降ステージ12aの高さを調整した後、入力装置55を用いて、再度、測定開始を指示する。上記のステップS108〜S114までの所要時間は僅かなので、イメージングプレート28には回折環が撮像されない。また、受光センサ31が測定対象物OBにて反射したX線を受光しない場合は、ステップS116にて、測定対象物OBの高さ方向の位置が不適切である旨の表示がなされるのみであって、昇降ステージ12aの高さ調整に関する情報は表示されない。この場合、測定対象物OBの位置は、極めて不適切な位置にあると考えられ、昇降ステージ12aの高さ調整の方向を目視で判断できる。
【0052】
一方、ステップS112において、距離Lが所定の基準範囲内である場合には、コントローラCTは、ステップS118に処理を進め、センサ信号取り出し回路32の作動を停止させる。そして、ステップS120にて、時間計測を開始し、ステップS122にて、所定の設定時間を経過したか否かを判定する。時間計測開始から所定の設定時間を経過していなければ、「No」と判定して、ステップS122を再び実行する。すなわち、コントローラCTは、時間計測開始から所定の設定時間を経過するまで待機する。そして、時間計測開始から所定の設定時間を経過すると、「Yes」と判定して、ステップS124にてX線の照射を停止させ、ステップS126にて、回折環撮像処理を終了する。
【0053】
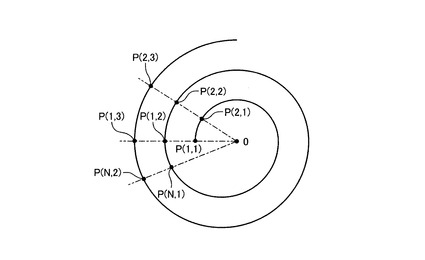
コントローラCTは、イメージングプレート28に回折環を撮像すると、回折環読み取りプログラムを実行する。本実施形態においては、コントローラCTは、テーブル27を回転させながら、イメージングプレート28を回折環読み取り領域内において一定速度で軸受部19側に移動させる。そして、テーブル27の回転角度(すなわち、イメージングプレート28の回転角度)が所定の回転角度になるごとに、A/D変換回路49及び位置検出回路21から、回折X線の強度を表すSUM信号及び移動ステージ15の位置(すなわち、イメージングプレート28の位置)を表す位置信号をそれぞれ取得して記憶する。したがって、図5に示すように、イメージングプレート28の受光面における、SUM信号及び位置信号を取得する読み取りポイントPの軌跡は、螺旋状となる。
【0054】
なお、取得した位置信号は、イメージングプレート28の受光面の中心Oからの距離(すなわち、半径)に相当する。また、各読み取りポイントPに、周方向の位置を表す周方向番号n及び半径方向の位置を表す半径方向番号mを付して、読み取りポイントP(n,m)と表記し、それぞれの読み取りポイントを識別する。すなわち、コントローラCTは、イメージングプレート28が微小角度Δθだけ回転するごとに周方向番号nをインクリメントし、イメージングプレート28が1回転するごとに周方向番号nを初期化する。本実施形態においては、Δθ=(360/N)°とし、所定の回転角度θ(n)(n=1,2・・・N)は、周方向番号が大きくなるに従って、(360/N)°ずつ大きくなる。また、イメージングプレート28が1回転するごとに半径方向番号mをインクリメントする。言い換えれば、半径方向番号mは、イメージングプレート28の周回数に相当する。
【0055】
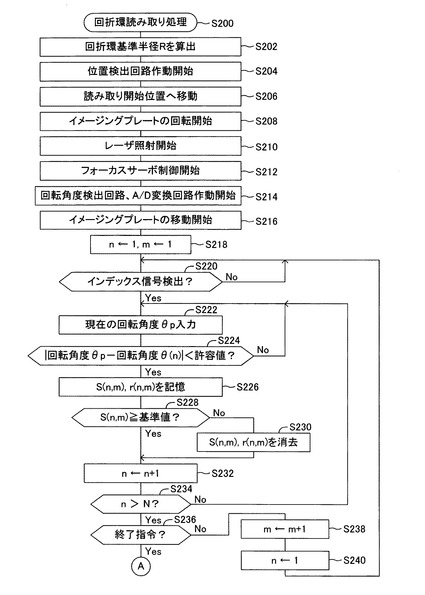
コントローラCTは、ステップS200にて、図6A及び図6Bに示すように、回折環読み取り処理を開始すると、ステップS202にて、回折環基準半径Rを算出する。回折環基準半径Rは、測定対象物OBの残留応力が「0」である場合の回折環の半径である。回折環基準半径Rは、測定対象物OBの材質及びイメージングプレート28から測定対象物OBまでの距離Lに依存する。すなわち、残留応力が「0」であるので、回折角θaは材質によって決定される。距離Lと回折環基準半径Rとは比例関係にあるので、予め材質ごとに、回折角θaを記憶しておけば、回折環基準半径Rを、R=L・tan(θa)の演算によって算出できる。なお、測定対象物OBの回折角θaが不明である場合には、その測定対象物OBの粉末を測定対象物OBに一様に付着させ、上記の回折環撮像処理を実行して、回折環を撮像すればよい。そして、この回折環の半径と距離Lの関係から回折角θaを求めればよい。
【0056】
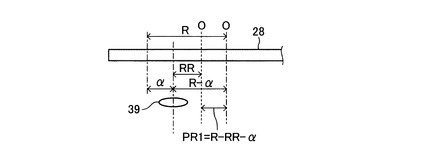
つぎに、コントローラCTは、ステップS204にて、位置検出回路21の作動を開始させる。そして、ステップS206にて、イメージングプレート28を回折環読み取り領域内の読み取り開始位置PR1へ移動させる。図7に示すように、イメージングプレート28が読み取り開始位置PR1にあるとき、中心Oから対物レンズ39の中心までの距離は、回折環基準半径Rよりも距離αだけ小さい。すなわち、読み取り開始位置PR1は、移動ステージ15が駆動限界位置にあるときの中心O(図7において破線で示す位置)から対物レンズ39の中心までの距離を距離RRとすると、PR1=R−RR−αなる演算により算出される。ここで、距離αは、撮像した回折環の半径が回折環基準半径Rからずれる可能性のある距離よりもやや大きい距離である。
【0057】
つぎに、コントローラCTは、ステップS208にて、イメージングプレート28の回転を開始させる。そして、ステップS210にて、レーザ光の照射を開始させる。つぎに、ステップS212にて、増幅回路44、フォーカスエラー信号生成回路45、フォーカスサーボ回路46及びドライブ回路47の作動を開始させ、フォーカス引き込みを行って、フォーカスサーボ制御を開始する。つぎに、ステップS214にて、回転角度検出回路26及びA/D変換回路49の作動を開始させる。そして、ステップS216にて、イメージングプレート28の移動を開始させる。すなわち、フィードモータ制御回路22に移動開始指令及び移動速度を出力し、イメージングプレート28を、読み取り開始位置PR1から軸受部19側へ、一定速度で移動させる。
【0058】
コントローラCTは、ステップS218にて、周方向番号n及び半径方向番号mの値をそれぞれ「1」に初期化する。読み取りポイントP(1,1)は、イメージングプレート28が読み取り開始位置PR1にあるときの読み取りポイントである。つぎに、コントローラCTは、ステップS220にて、エンコーダ24aのインデックス信号を入力したか否かを判定する。インデックス信号を入力していなければ、「No」と判定して、再びステップS220を実行する。すなわち、コントローラCTは、インデックス信号を入力するまで待機する。そして、インデックス信号を入力すると、コントローラCTは「Yes」と判定して、ステップS222にて、回転角度検出回路26から、イメージングプレート28の現在の回転角度θpを取り込む。そして、ステップS224にて、現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値未満であるか否か判定する。現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値以上であるときは、「No」と判定して、ステップS222及びステップS224を再び実行する。すなわち、コントローラCTは、現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値未満になるまで待機する。そして、現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値未満になると、ステップS226にて、A/D変換回路49からSUM信号を取り込むとともに、位置検出回路21から位置信号を取り込んで、読み取りポイントP(n,m)の信号強度S(n,m)及び半径値r(n,m)としてメモリに記憶する。
【0059】
つぎに、コントローラCTは、ステップS228にて、前記記憶した信号強度S(n,m)が、所定の基準値以上であるか否か判定する。信号強度S(n,m)が所定の基準値以上であるときは、「Yes」と判定して、処理を後述のステップS232に進める。一方、信号強度S(n,m)が、所定の基準値より小さいときは、「No」と判定して、ステップS230にて、前記記憶した信号強度S(n,m)及び半径値r(n,m)を消去する。そして、ステップS232にて、周方向番号nの値をインクリメントして、ステップS234にて、イメージングプレート28が1回転したか否かを判定する。すなわち、周方向番号nが最大値Nより大きいか否かを判定する。周方向番号nが最大値N以下であるときは、「No」と判定して、ステップS222に戻る。
【0060】
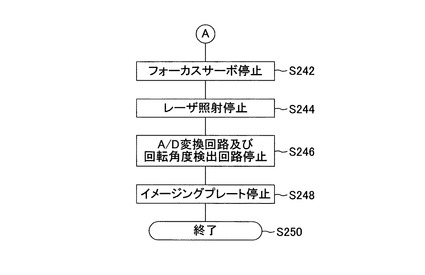
一方、周方向番号nが最大値Nよりも大きいときは、「Yes」と判定して、ステップS236にて、後述の回折環検出プログラムによる終了指令の有無を判定する。未だ終了指令がないときは、「No」と判定して、ステップS238にて、半径方向番号mをインクリメントし、ステップS240にて、周方向番号nを「1」に設定して、ステップS220に戻る。ステップS220〜S240の処理を繰り返すことで、信号強度S(n,m)及び半径値r(n,m)のデータが回転角度θ(n)に対応付けられて記憶される。すなわち、イメージングプレート28の回転角度θ(n)及び半径値r(n,m)で表される位置の回折X線の強度が記憶される。一方、回折環測定プログラムにより終了指令が発せられたときは、ステップS242(図6B)にて、フォーカスサーボ制御を停止し、ステップS244にて、レーザ光の照射を停止する。つぎに、ステップS246にて、A/D変換回路49及び回転角度検出回路26の作動を停止させる。そして、ステップS248にて、イメージングプレート28の移動を停止させ、ステップS250にて、回折環読み取り処理を終了する。
【0061】
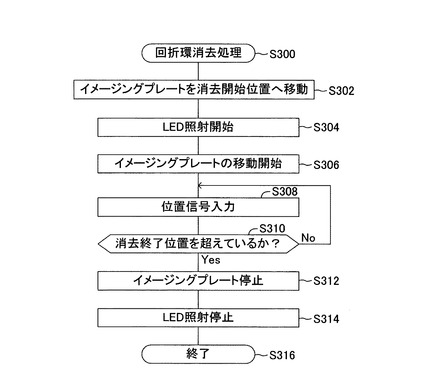
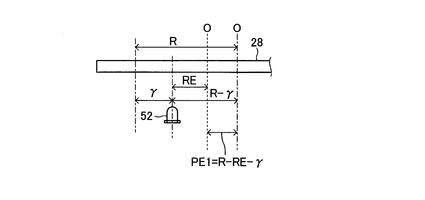
コントローラCTは、回折環読み取り処理を終了すると、イメージングプレート28に撮像された回折環を消去する回折環消去プログラムを実行する。コントローラCTは、図8示すように、ステップS300にて回折環消去処理を開始すると、ステップS302にて、イメージングプレート28を回折環消去領域内の消去開始位置PE1へ移動させる。図9Aに示すように、イメージングプレート28が消去開始位置PE1にあるとき、中心OからLED52までの距離は、回折環基準半径Rよりも距離γだけ小さい。すなわち、消去開始位置PE1は、移動ステージ15が駆動限界位置にあるときの中心OとLED52の距離を距離REとすると、PE1=R−RE−γなる演算により算出される。ここで、距離γは、回折環を確実に消去できるように、距離αよりも大きく設定されている。
【0062】
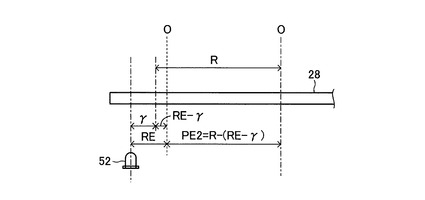
つぎに、コントローラCTは、ステップS304にて、LED52の発光を開始させ、ステップS306にて、イメージングプレート28の移動を開始させる。そして、ステップS308にて位置検出回路21から位置信号を入力する。そして、ステップS310にて、イメージングプレート28の現在の位置が消去終了位置PE2を超えているか否かを判定する。図9Bに示すように、イメージングプレート28が消去終了位置PE2にあるとき、中心OからLED52までの距離は、回折環基準半径Rよりも距離γだけ大きい。すなわち、消去終了位置PE2は、PE2=R−RE+γなる演算により算出される。イメージングプレート28が消去終了位置PE2を超えていなければ、ステップS308に戻る。すなわち、コントローラCTは、イメージングプレート28が、消去終了位置PE2を超えるまで待機する。そして、イメージングプレート28が、消去終了位置PE2を超えると、ステップS310にて「Yes」と判定して、ステップS312にて、イメージングプレート28の回転及び移動を停止する。つぎに、ステップS314にて、LED52の発光を停止し、ステップS316にて、回折環消去処理を終了する。
【0063】
また、コントローラCTは、上記の回折環読み取りプログラムと並行して、回転角度θ(n)ごとにSUM信号の値がピーク(極大)となるピーク半径rp(n)を検出して回折環の形状を検出する回折環形状検出プログラムを実行する。コントローラCTは、図10に示すように、ステップS400にて、回折環形状検出処理を開始すると、ステップS402にて、周方向番号nを「1」に初期化する。つぎに、ステップS404にて、回転角度θ(n)におけるピーク半径rp(n)を検出済みか否か判定する。回転角度θ(n)におけるピーク半径rp(n)を検出済みであるときは、「Yes」と判定して、ステップS406にて、周方向番号nをインクリメントし、ステップS408にて周方向番号nが最大値Nより大きいか否かを判定する。周方向番号nが最大値N以下であるときは、「No」と判定してステップS404に戻り、周方向番号nが最大値Nより大きければ「Yes」と判定してステップS402に戻る。
【0064】
一方、回転角度θ(n)におけるピーク半径rp(n)を未検出であれば、「No」と判定して、ステップS410にて、イメージングプレート28の回転角度が回転角度θ(n)であるときに記憶した信号強度S(n,m)の数が所定の基準数以上であるか否か判定する。ただし、ステップS230において、消去された信号強度S(n,m)は、イメージングプレート28の回転角度が回転角度θ(n)であるときに記憶した信号強度S(n,m)としてカウントしない。前記記憶した信号強度S(n,m)の数が所定の基準数より少ないときは、「No」と判定して、コントローラCTは処理をステップS406へ進める。
【0065】
一方、前記記憶した信号強度S(n,m)の数が所定の基準数以上であるときは、「Yes」と判定して、ステップS412にて、回転角度θ(n)に対応付けられて記憶されている全ての半径値r(n,m)及び信号強度S(n,m)を用いて、SUM信号の値のピークの有無を判定する。すなわち、図11に示すように、半径値r(n,m)と信号強度S(n,m)との関係を表した受光曲線において、ピークが存在しなければ、「No」と判定して、ステップS406に戻る。このように、ステップS402〜S412を繰り返し実行している間に、並行して実行されている回折環読み取り処理により、さらに半径値r(n,m)及び信号強度S(n,m)が取り込まれてメモリに記憶される。そして、ステップS412にてピークを検出すると、「Yes」と判定して、ステップS414にて、ピークの半径値をピーク半径rp(n)としてメモリに記憶する。つぎに、ステップS416にて、取得したピーク半径の数が所定の基準数以上であるか否かを判定する。取得したピーク半径の数が所定の基準数より少なければ、「No」と判定して、ステップS406に戻る。このようにステップS402〜S416を繰り返すことで、取得したピーク半径の数が増えていき、基準数に達すると、ステップS416にて「Yes」と判定して、ステップS418にて、回折環読み取り処理を終了させる終了指令を出力し、ステップS420にて、回折環形状検出処理を終了する。なお、所定の基準数は、周方向番号nの最大値Nであり、ステップS416にて「Yes」と判定することは、周方向の全てのポイントにてピーク半径が取得されたことを意味する。
【0066】
コントローラCTは、回折環形状検出処理を終了すると、ピーク半径rp(n)を用いて、cosα法により、残留応力を算出し、回折環の画像データ及び算出した残留応力のデータを作成して、表示装置54に出力する。表示装置54は、入力したデータに従って、回折環の画像及び残留応力の数値を表示する。
【0067】
上記のように構成したX線回折装置においては、測定対象物OBにて回折した回折X線をイメージングプレート28によって受光して、回折環を撮像し、イメージングプレート28を回転させながら半径方向に移動させるとともに、レーザ検出装置PUHからレーザを照射して、照射位置から発生する光の強度を回転角度及び半径位置と共に検出することで、回折環における回折X線の強度を検出するようにした。したがって、X線CCDを用いて回折光を受光する装置に比べてコストダウンでき、回折X線の強度のピーク位置を精度よく検出できる。また、上記従来のX線回折装置においては、回折環を撮像したイメージングプレート28をX線照射装置から取り外して、読み取り装置にセットする必要があったが、本実施形態に係るX線回折装置によれば、このような手間を省くことができる。また、一度、回折環の中心を検出すれば、その後の測定においては、前記検出した回折環の中心を用いることができる。したがって、回折環の形状を短時間で検出できる。
【0068】
また、受光センサ31によって、距離Lを計測して、回折環基準半径Rを算出するようにした。そして、測定対象物OBの回折環の半径が、回折環基準半径Rからずれる可能性のある領域についてのみレーザ光を照射して、輝尽発光現象によりイメージングプレート28から発せられた光を含む、フォトディテクタ43に入射した光の強度を検出するようにした。したがって、回折環の形状を短時間で検出できる。
【0069】
また、回折環形状検出処理において、回折環の形状を検出するのに十分な読み取りデータを記憶した時点で、回折環読み取り処理を停止させるようにした。したがって、回折環の形状を短時間で検出できる。
【0070】
また、回折環読み取り処理において、回折環の形状を表すデータとして不必要であると考えられるデータを消去(すなわち、照射したレーザ光の反射光の強度に相当するSUM信号の強度よりやや大きい強度を基準値とし、この基準値以上のSUM信号強度のみを取得)するようにした。これによれば、回折環形状検出処理において処理するデータ数を少なくできるので、回折環の形状を短時間で検出できる。
【0071】
さらに、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0072】
上記実施形態においては、イメージングプレート28の回転角度が所定の回転角度になるごとに、信号強度S(n,m)及び半径値r(n,m)を記憶するようにした。しかし、これに代えて、半径値rが所定の値になるごとに信号強度S(n,m)及びイメージングプレート28の回転角度θ(n,m)を記憶するようにしてもよい。この場合、回折環形状検出処理においては、所定の回転角度における半径方向の信号強度Sの変化を補間法により算出すればよい。これによっても、上記実施形態と同様の効果が得られる。
【0073】
また、所定の時間間隔で、イメージングプレート28の回転角度θ(n,m)、信号強度S(n,m)及び半径値r(n,m)を取得して記憶してもよい。この場合も、回折環形状検出処理においては、所定の回転角度における半径方向の信号強度Sの変化を補間法により算出すればよい。これによっても、上記実施形態と同様の効果が得られる。
【0074】
また、上記実施形態においては、受光センサ31によって受光した反射光の受光位置を用いて、測定対象物OBの高さ方向の位置が、所定の範囲内にあるか否かを判定し、所定の範囲内になければ、作業者が昇降ステージ12aの高さを調整するようにした。しかし、受光センサ31の受光位置が表す測定対象物OBの高さ方向の位置が所定の範囲内にあるように、昇降ステージ12aの高さが自動的に調整されるように構成してもよい。これによれば、作業者がセットした測定対象物OBの高さ方向の位置が、受光センサ31が反射光を受光できる範囲にありさえすれば、作業者が昇降ステージ12aの高さを調整する必要が無いので、作業効率を向上させることができる。なお、例えば上記従来のX線検出装置のように、イメージングプレートと測定対象物との距離が常に一定になるように構成されていれば、受光センサ31は不要である。
【0075】
また、上記実施形態においては、受光センサ31の受光位置を用いて、回折環基準半径Rを算出し、撮像した回折環の半径が回折環基準半径Rからずれる可能性のある領域を想定して、読み取り開始位置PR1を決定するようにした。しかし、回折環基準半径Rを算出することなく、常に一定の領域にレーザ光を照射するようにしてもよい。例えば、イメージングプレート28の全領域にレーザ光を照射するようにしてもよい。また、LED53による可視光の照射についても同様に、常に一定の領域にLED53から発せられた可視光を照射するようにしてもよい。例えば、イメージングプレート28の全領域にLED53からの可視光を照射するようにしてもよい。ただし、この場合、上記実施形態よりも測定時間が長くなる。
【0076】
また、上記実施形態においては、レーザ検出装置PUHは、フォーカスサーボ制御されるようにしたが、イメージングプレート28を回転させた際のイメージングプレート28の受光面と対物レンズ39との距離の変動が微小であれば、フォーカスサーボ制御は不要である。
【0077】
また、上記実施形態においては、イメージングプレート28に照射されるレーザ光は、一定強度のレーザ光としたが、これに代えて、予め設定されたハイレベルの強度と、予め設定されたローレベルの強度が繰り返されるパルス状のレーザ光とし、ハイレベルの強度になるタイミングでSUM信号の瞬時値を取得するようにしてもよい。これによれば、イメージングプレート28のSUM信号の瞬時値を取得するポイントに瞬間的にハイレベルの強度のレーザ光を照射することができる。すなわち、SUM信号の瞬時値を取得するポイントにレーザ光がさしかかった状態では、レーザ光の強度はローレベルであり、輝尽発光により発生する光はほとんど無い。そして、SUM信号の瞬時値を取得するポイントとレーザ光の照射ポイントが一致したときにレーザ光の強度がハイレベルになって輝尽発光による光が発生する。常にハイレベルの強度のレーザ光を照射した場合は、輝尽発光による光が生じ続けることで光の強度が減少するが、上記のように構成すれば、輝尽発光によって光が生じたタイミングとほぼ同じタイミングでSUM信号の瞬時値を取得することができる。したがって、SUM信号の瞬時値を取得するタイミングにおいて輝尽発光により発生する光の強度を、より回折X線の強度に近似させることができる。
【符号の説明】
【0078】
13…X線照射器、15…移動ステージ、18…フィードモータ、21・・・位置検出回路、24・・・スピンドルモータ、26…回転角度検出回路、27…テーブル、28…イメージングプレート、31…受光センサ、45・・・フォーカスエラー信号生成回路、46・・・フォーカスサーボ回路、47・・・ドライブ回路、48・・・SUM信号生成回路、PUH…レーザ検出装置、CT…コントローラ、OB…測定対象物
【技術分野】
【0001】
本発明は、測定対象物にX線を照射し、測定対象物にて回折したX線によりイメージングプレートの表面に形成された回折環の形状に基づいて、測定対象物の特性を評価するX線回折装置に関する。
【背景技術】
【0002】
従来から、例えば下記特許文献1に示されているように、測定対象物の残留応力を測定するX線回折装置は知られている。このX線回折装置においては、測定対象物に対し、X線を所定の角度で照射し、測定対象物にて回折したX線(以下、回折X線という)を、感光性を有するイメージングプレートで受光し、イメージングプレートに形成された環状のX線回折像(以下、回折環という)の形状を分析するcosα法により、測定対象物の残留応力を算出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−241308号公報
【発明の概要】
【0004】
上記従来のX線回折装置は、測定対象物にX線を照射してイメージングプレートに回折環を形成させる照射装置と、イメージングプレートに形成された回折環の形状を読み取る読み取り装置から構成されている。すなわち、照射装置によって、イメージングプレートに回折環を形成した後、イメージングプレートを取り外して、読み取り装置にセットする必要があった。また、測定ごとにイメージングプレートの取り付け位置が微妙にずれるので、測定ごとに測定対象物からの回折X線による回折環の中心を求める必要があった。具体的には、測定対象物に鉄粉末を付着させた状態でX線を照射し、この鉄粉末にて回折した回折X線による回折環をイメージングプレートに形成させて、この回折環の中心を求める必要があった。このように、測定に手間がかかっていた。
【0005】
また、上記特許文献1には、イメージングプレートに代えてX線CCDを用いたX線回折装置も記載されている。この場合は、イメージングプレートを読み取り装置にセットする手間を省くことができる。また、この場合、一度、測定対象物に鉄粉末を付着させ、鉄粉末からの回折X線による回折環の中心を取得すれば、以降の測定においては、前記取得した中心を測定対象物からの回折X線による回折環の中心として用いることができる。すなわち、測定ごとに、回折環の中心を取得する必要が無い。しかし、回折X線を受光する可能性がある範囲は広いので、受光面積の広いX線CCDが必要であり、装置のコストが高くなるという問題がある。また、イメージングプレートのダイナミックレンジに比べて、X線CCDのダイナミックレンジは小さいので、X線CCDを用いた場合、回折環の半径方向に沿う回折X線の強度のピーク位置を検出するのが困難であるという問題があった。
【0006】
本発明は上記問題に対処するためになされたもので、その目的は、回折環の形状を短時間で精度良く検出できる、安価なX線回折装置を提供することにある。なお、下記本発明の各構成要件の記載においては、本発明の理解を容易にするために、後述する実施形態の対応箇所の符号を括弧内に記載しているが、本発明の各構成要件は、実施形態の符号によって示された対応箇所の構成に限定解釈されるべきものではない。
【0007】
上記目的を達成するために、本発明の特徴は、測定対象物(OB)に向けてX線を出射するX線出射器(13)と、中央にX線を通過させる貫通孔が形成されたテーブル(27)と、テーブルに固定されていて、測定対象物にて回折したX線の回折光を受光する受光面を有し、回折光の像である回折環を記録する回折光受光器(28)と、回折光受光器の受光面にレーザ光を照射するとともに、レーザ光の照射によって回折光受光器から出射された光の強度を検出するレーザ検出装置(PUH)と、テーブルを、前記貫通孔の中心軸回りに回転させる回転手段(24)と、テーブルを、回折光受光器の受光面に平行な方向に、レーザ検出装置に対して相対的に移動させる移動手段(18)と、回転手段によってテーブルが回転され、かつ移動手段によってテーブルが移動されている状態で、レーザ検出装置によって繰り返し検出された光の強度を、それぞれの光の強度の検出時におけるテーブルの回転角度及びレーザ検出装置に対するテーブルの相対位置に関連付けて複数の読み取りデータとしてそれぞれ記憶するデータ読み取り手段(S208,S216,S226)と、前記記憶した複数の読み取りデータを用いて回折環の形状を検出する回折環形状検出手段(S414)を備えたことにある。
【0008】
この場合、テーブルの回転角度を検出する回転角度検出手段(24a)と、レーザ検出装置に対するテーブルの相対位置を検出する位置検出手段(18a)とを備え、データ読み取り手段は、回転角度検出手段によって検出したテーブルの回転角度が所定の角度になるごとに、レーザ検出装置によって検出した光の強度及び位置検出手段によって検出したレーザ検出装置に対するテーブルの相対位置を1組の読み取りデータとして記憶するとよい。
【0009】
また、この場合、テーブルの回転角度を検出する回転角度検出手段と、レーザ検出装置に対するテーブルの相対位置を検出する位置検出手段とを備え、データ読み取り手段は、位置検出手段によって検出したレーザ検出装置に対するテーブルの相対位置が所定の位置になるごとに、レーザ検出装置によって検出した光の強度及び回転角度検出手段によって検出したテーブルの回転角度を1組の読み取りデータとして記憶してもよい。
【0010】
また、この場合、テーブルの回転角度を検出する回転角度検出手段と、レーザ検出装置に対するテーブルの相対位置を検出する位置検出手段とを備え、データ読み取り手段は、一定の時間間隔でレーザ検出装置によって検出した光の強度、回転角度検出手段によって検出したテーブルの回転角度、及び位置検出手段によって検出したレーザ検出装置に対するテーブルの相対位置を1組の読み取りデータとして記憶してもよい。
【0011】
また、この場合、レーザ検出装置は、回折光受光器の受光面に照射するレーザ光を出射するレーザ出射器(33)と、レーザ出射手段から出射されたレーザ光を集光する対物レンズ(39)と、対物レンズをレーザ光の光軸方向に移動させるアクチュエータ(40)と、受光した光の強度及び形状に応じた受光信号を出力するフォトディテクタ(43)と、回折光受光器の受光面のレーザ光照射位置から入射した光をフォトディテクタに導くとともに、レーザ光の焦点と前記回折光受光器の受光面とのずれに応じて、フォトディテクタの受光面に形成される受光した光の形状を異ならせる光学部品(42)とを備え、データ読み取り手段は、フォトディテクタから出力された受光信号に基づいて、対物レンズによって集光されたレーザ光の焦点と回折光受光器の受光面とのずれに相当するエラー信号を生成し、エラー信号に基づいて、レーザ光の焦点と回折光受光器の受光面とが一致するようにアクチュエータを駆動する駆動手段(45,46,47)を備えるとよい。
【0012】
上記のように構成したX線回折装置によれば、回折光受光器として蛍光体を塗布したフィルムを採用できる。したがって、X線CCDを用いて回折光を受光する装置に比べてコストを下げることができ、回折X線の強度のピーク位置を精度良く検出できる。また、回折環を撮像した回折光受光器をテーブルから取り外して、別途用意された読み取り装置に取り付ける必要が無い。さらに、回折光受光器を取り外さないので、一度、回折環の中心を検出すれば、その後の測定においては、回折環の中心を検出する必要が無い。したがって、回折環の形状を短時間で精度良く検出できる。
【0013】
また、本発明の他の特徴は、X線出射器から出射されて測定対象物にて反射した反射X線を受光して、回折光受光器から測定対象物までの距離に関連した受光信号を出力する反射X線受光器(31,32)をさらに備え、データ読み取り手段は、受光信号に基づいて、レーザ検出装置によって検出された光の強度を前記読み取りデータとして記憶し始めるときのレーザ検出装置に対するテーブルの相対位置を設定することにある。
【0014】
上記のように構成したX線回折装置においては、測定対象物と回折光受光器との間の距離に関連する信号を用いて、回折光受光器の受光面に形成された回折環の半径を予測することができる。すなわち、測定対象物の表面におけるX線の回折角度は、その測定対象物の材質によって決まるので、回折光受光器の受光面に形成された回折環の半径は、測定対象物と回折光受光器との間の距離に比例する。したがって、予め記憶された測定対象物の残留応力が「0」である場合の回折角、及び回折光受光器から測定対象物までの距離に関連する信号を用いて、測定対象物の残留応力が「0」である場合の回折環の半径を算出することができる。そして、撮像した回折環の半径が回折環基準半径Rからずれる可能性のある所定の領域についてのみ、レーザ検出装置によって光の強度を検出して、読み取りデータとして記憶できる。これにより、測定時間を短縮できる。
【0015】
また、本発明の他の特徴は、回折環形状検出手段は、テーブルの所定の回転角度ごとに、回折光受光器の受光面の半径方向の位置とレーザ検出装置によって検出した光の強度との関係を表した受光曲線における、前記検出した光の強度のピークの有無を検出し、ピークを有する受光曲線が所定数以上存在するとき、データ読み取り手段による前記検出した光の強度の読み取りデータとしての記憶を終了させることにある。
【0016】
上記のように構成したX線回折装置によれば、回折環の形状を検出するのに十分なデータを記憶した時点で、データ読み取り手段の作動を停止させることができるので、測定時間を短縮することができる。
【0017】
また、本発明の他の特徴は、回折環形状検出手段は、レーザ検出装置によって検出された光の強度が所定の基準値より大きいとき、光の強度に対応した読み取りデータを回折環の形状を検出するためのデータとして採用し、レーザ検出装置によって検出された光の強度が所定の基準値以下であるとき、光の強度に対応した読み取りデータを回折環の形状を検出するためのデータとして採用しないことにある。
【0018】
上記のように構成したX線回折装置によれば、回折環の形状を表すデータとして不必要と考えられる読み取りデータを採用しないので、データ処理の際のデータ数を削減でき、測定時間を短縮できる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態に係るX線回折装置の全体概略図である。
【図2】図1のX線回折装置の本体部分を拡大した拡大図である。
【図3】イメージングプレートから測定対象物までの距離と、受光センサにおける受光位置との関係を説明する説明図である。
【図4】図1のコントローラが実行する回折環撮像処理のフローチャートである。
【図5】読み取りポイントの軌跡を説明する説明図である。
【図6A】図1のコントローラが実行する回折環読み取り処理の前半部分のフローチャートである。
【図6B】図1のコントローラが実行する回折環読み取り処理の後半部分のフローチャートである。
【図7】読み取り開始位置を説明する説明図である。
【図8】図1のコントローラが実行する回折環消去処理のフローチャートである。
【図9A】消去開始位置を説明する説明図である。
【図9B】消去終了位置を説明する説明図である。
【図10】図1のコントローラが実行する回折環形状検出処理を示すフローチャートである。
【図11】信号強度のピークを説明するために、受光曲線の一例を示したグラフである。
【発明を実施するための形態】
【0020】
本発明の一実施形態に係るX線回折装置の構成について図1及び図2を用いて説明する。このX線回折装置は、X線を測定対象物OBに照射するとともに、同照射による測定対象物OBからの回折X線による回折環の形状を読み取り、読み取った回折環の形状に基づいて、測定対象物OBの特性を評価する。このX線回折装置は、箱状に形成されたフレームFRを有し、フレームFRの底面の角部から下方へ支持脚11が延設されている。すなわち、フレームFRの底面は、X線回折装置の設置面FLよりも上方に位置する。フレームFRの下方には、昇降機12が設けられている。昇降機12は、測定対象物OBを固定するための昇降ステージ12aを有する。昇降ステージ12aは、上下に昇降可能となっている。フレームFRの底面であって、昇降機12の上方に位置する部分には開口部が設けられていて、昇降ステージ12aを上昇させることにより、固定した測定対象物OBをフレームFRの内部へ搬入することができる。
【0021】
フレームFR内の上部には、X線制御回路14によって制御されて、X線を出射するX線出射器13が固定されている。X線出射器13から出射されたX線の光軸と、測定対象物OBの法線とが所定の角度θ(例えば、30°)をなすように、X線出射器13の出射口の向きが設定されている。
【0022】
X線制御回路14は、後述するコントローラCTによって制御され、X線出射器13から一定の強度のX線が出射されるように、X線出射器13に供給する駆動電流及び駆動電圧を制御する。また、X線出射器13は、図示しない冷却装置を備えていて、X線制御回路14は、この冷却装置に供給する駆動信号も制御する。これにより、X線出射器13の温度が一定に保たれる。
【0023】
X線出射器13の下方には、移動ステージ15が設けられている。移動ステージ15は、ステージ送り装置16により、X線出射器13から出射されたX線の光軸に垂直な方向に移動可能となっている。ステージ送り装置16は、移動ステージ15に固定された図示しないナットに螺合するスクリューロッド17と、スクリューロッド17を回転させるフィードモータ18とを備えている。スクリューロッド17は、X線出射器13から出射されたX線の光軸に垂直な方向に延設されている。そして、スクリューロッド17の一端部が、フレームFRに固定されたフィードモータ18の出力軸に連結され、他端部が、フレームFRに固定された軸受部19に回転可能に支持される。また、移動ステージ15は、それぞれフレームFRに固定された、対向する1対の板状のガイド20,20により挟まれていて、スクリューロッド17の軸線方向に沿って移動可能となっている。すなわち、フィードモータ18を正転又は逆転駆動すると、フィードモータ18の回転運動が移動ステージ15の直線運動に変換される。フィードモータ18内には、エンコーダ18aが組み込まれている。エンコーダ18aは、フィードモータ18が所定の微小回転角度だけ回転する度に、ハイレベルとローレベルとに交互に切り替わるパルス列信号を位置検出回路21及びフィードモータ制御回路22へ出力する。
【0024】
位置検出回路21及びフィードモータ制御回路22は、コントローラCTからの指令により作動開始する。測定開始直後において、フィードモータ制御回路22は、フィードモータ18を駆動して移動ステージ15をフィードモータ18側へ移動させる。位置検出回路21は、エンコーダ18aから出力されるパルス信号が入力されなくなると移動ステージ15が移動限界位置に達したことを表す信号をフィードモータ制御回路22に出力し、カウント値を「0」に設定する。フィードモータ制御回路22は、位置検出回路21から移動限界位置に達したことを表す信号を入力するとフィードモータ18への駆動信号の出力を停止する。上記の移動限界位置を移動ステージ15の原点位置とする。
【0025】
フィードモータ制御回路22は、コントローラCTから移動ステージ15の移動先の位置を表す設定値を入力すると、その設定値に応じてフィードモータ18を正転又は逆転駆動する。位置検出回路21は、エンコーダ18aが出力するパルス信号のパルス数をカウントする。そして、カウントしたパルス数を用いて移動ステージ15の現在の位置を計算し、コントローラCT及びフィードモータ制御回路22に出力する。フィードモータ制御回路22は、位置検出回路21から入力した移動ステージ15の現在の位置が、コントローラCTから入力した移動先の位置と一致するまでフィードモータ18を駆動する。
【0026】
また、フィードモータ制御回路22は、移動ステージ15の移動速度を表す設定値をコントローラCTから入力する。そして、エンコーダ18aから入力したパルス信号の単位時間当たりのパルス数を用いて、移動ステージ15の移動速度を計算し、前記計算した移動ステージ15の移動速度がコントローラCTから入力した移動速度になるようにフィードモータ18を駆動する。
【0027】
一対のガイド20,20の上端は、板状の上壁23によって連結されている。上壁23には、貫通孔23aが設けられていて、貫通孔23aには、X線出射器13の出射口の先端部が挿入されている。なお、X線出射器13の出射口の先端が移動ステージ15に当接しないように、X線出射器13及び移動ステージ15の位置が設定されている。
【0028】
また、移動ステージ15には、スピンドルモータ24が組み付けられている。スピンドルモータ24内には、エンコーダ18aと同様のエンコーダ24aが組み込まれている。すなわち、エンコーダ24aは、スピンドルモータ24が所定の微小回転角度だけ回転する度に、ハイレベルとローレベルとに交互に切り替わるパルス列信号を、スピンドルモータ制御回路25及び回転角度検出回路26へ出力する。さらに、エンコーダ24aは、スピンドルモータ24が1回転するごとに、所定の短い期間だけローレベルからハイレベルに切り替わるインデックス信号を、コントローラCT及び回転角度検出回路26へ出力する。
【0029】
スピンドルモータ制御回路25及び回転角度検出回路26は、コントローラCTからの指令により作動開始する。スピンドルモータ制御回路25は、コントローラCTから、スピンドルモータ24の回転速度を表す設定値を入力する。そして、エンコーダ24aから入力したパルス信号の単位時間当たりのパルス数を用いてスピンドルモータ24の回転速度を計算し、計算した回転速度がコントローラCTから入力した回転速度になるように、駆動信号をスピンドルモータ24に供給する。回転角度検出回路26は、エンコーダ24aから出力されたパルス列信号のパルス数をカウントし、そのカウント値を用いてスピンドルモータ24の回転角度を計算して、コントローラCTに出力する。そして、回転角度検出回路26は、エンコーダ24aから出力されたインデックス信号を入力すると、カウント値を「0」に設定する。すなわち、インデックス信号を入力した位置が回転角度0°の位置である。
【0030】
スピンドルモータ24の出力軸の先端部には、円板状のテーブル27が固定されている。テーブル27の中心軸と、スピンドルモータ24の出力軸の中心軸とは一致している。テーブル27は、下面中央部から下方へ突出した突出部27aを有していて、突出部27aの外周面には、ねじ山が形成されている。突出部27aの中心軸は、スピンドルモータ24の出力軸の中心軸と一致している。テーブル27の下面には、イメージングプレート28が組み付けられている。イメージングプレート28は、表面に蛍光体が塗布された円形のプラスチックフィルムである。イメージングプレート28の中心部には、貫通孔28aが設けられていて、この貫通孔28aに突出部27aを通し、突出部27aにナット状の固定具29をねじ込むことにより、イメージングプレート28が、固定具29とテーブル27の間に挟まれて固定される。固定具29は、円筒状の部材で、内周面に、突出部27aのねじ山に対応するねじ山が形成されている。イメージングプレート28は、フィードモータ18によって駆動されて、移動ステージ15、スピンドルモータ24及びテーブル27と共に原点位置から回折環を撮像する回折環撮像位置へ移動する。また、イメージングプレート28は、スピンドルモータ24によって駆動されて回転しながら、フィードモータ18によって駆動されて、移動ステージ15、スピンドルモータ24及びテーブル27と共に撮像した回折環を読み取る回折環読み取り領域内、回折環を消去する回折環消去領域内を移動する。
【0031】
また、移動ステージ15、スピンドルモータ24の出力軸、テーブル27及び固定具29には、X線出射器13から出射されたX線を通過させる貫通孔がそれぞれ設けられている。これらの貫通孔の中心軸と、テーブル27の回転軸は一致している。すなわち、これらの貫通孔の中心軸と、X線出射器13から出射されるX線の光軸とが一致するとき、X線が測定対象物OBに照射される。このように、X線を測定対象物OBに照射するときのイメージングプレート28の位置が、回折環撮像位置である。
【0032】
フィードモータ18の下方には、測定対象物OBにて反射したX線を受光する複数の受光素子からなる受光センサ31(例えば、X線CCD)が組み付けられている。受光センサ31は、測定対象物OB及びイメージングプレート28からフィードモータ18側に十分離れている。これにより、イメージングプレート28が回折環撮像位置にあるとき、受光センサ31は、測定対象物OBにて反射したX線を直接受光できる。受光センサ31の受光面は、測定対象物OBの上面と平行である。受光センサ31の受光面におけるX線の受光位置は、図3に示すように、測定対象物OBの高さに対応している。言い換えれば、イメージングプレート28と測定対象物OBとの距離Lに対応している。受光センサ31は、それぞれの受光素子が受光した受光信号をセンサ信号取り出し回路32へ出力する。
【0033】
センサ信号取り出し回路32は、コントローラCTからの指令により作動開始し、受光センサ31から入力した受光信号を用いて受光センサ31の受光面における受光信号のピーク位置を算出して受光位置を表す受光位置信号としてコントローラCTへ出力する。
【0034】
また、受光センサ31の下方には、レーザ検出装置PUHが組み付けられている。レーザ検出装置PUHは、回折環を撮像したイメージングプレート28にレーザ光を照射して、イメージングプレート28から入射した光の強度を検出する。レーザ検出装置PUHは、測定対象物OB及びイメージングプレート28からフィードモータ18側に十分離れている。すなわち、イメージングプレート28が回折環撮像位置にあるとき、測定対象物OBにて回折したX線がレーザ検出装置PUHによって遮られないようになっている。レーザ検出装置PUHは、レーザ光源33と、コリメートレンズ35、反射鏡36、偏光ビームスプリッタ37、1/4波長板38及び対物レンズ39を備えている。
【0035】
レーザ光源33は、レーザ駆動回路34によって制御されて、イメージングプレート28に照射するレーザ光を出射する。
【0036】
レーザ駆動回路34は、コントローラCTによって制御され、レーザ光源33から所定の強度のレーザ光が出射されるように、駆動信号を制御して供給する。レーザ駆動回路34は、後述するフォトディテクタ51から出力された受光信号を入力して、受光信号の強度が所定の強度になるようにレーザ光源33に出力する駆動信号を制御する。これにより、イメージングプレート28に照射されるレーザ光の強度が一定に維持される。
【0037】
コリメートレンズ35は、レーザ光源33から出射されたレーザ光を平行光に変換する。反射鏡36は、コリメートレンズ35にて平行光に変換されたレーザ光を、偏光ビームスプリッタ37に向けて反射する。偏光ビームスプリッタ37は、反射鏡36から入射したレーザ光の大半(例えば、95%)をそのまま透過させる。1/4波長板38は、偏光ビームスプリッタ37から入射したレーザ光を直線偏光から円偏光に変換する。対物レンズ39は、1/4波長板38から入射したレーザ光をイメージングプレート28の表面に集光させる。
【0038】
対物レンズ39には、フォーカスアクチュエータ40が組み付けられている。フォーカスアクチュエータ40は、対物レンズ39をレーザ光の光軸方向に移動させるアクチュエータである。なお、対物レンズ39は、フォーカスアクチュエータ40が通電されていないときに、その可動範囲の中心に位置する。
【0039】
対物レンズ39によって集光されたレーザ光を、イメージングプレート28の表面であって、回折環が撮像されている部分に照射すると、輝尽発光(Photo−Stimulated Luminesence)現象が生じる。すなわち、回折環を撮像した後、イメージングプレート28にレーザ光を照射すると、イメージングプレート28の蛍光体が回折X線の強度に応じた光であって、レーザ光の波長よりも波長が短い光を発する。イメージングプレート28に照射されて反射したレーザ光の反射光及び蛍光体から発せられた光は、対物レンズ39及び1/4波長板38を通過して、偏光ビームスプリッタ37にて反射する。偏光ビームスプリッタ37の反射方向には、集光レンズ41、シリンドリカルレンズ42及びフォトディテクタ43が設けられている。集光レンズ41は、偏光ビームスプリッタ37から入射した光を、シリンドリカルレンズ42に集光する。シリンドリカルレンズ42は、透過した光に非点収差を生じさせる。フォトディテクタ43は、分割線で区切られた4つの同一正方形状の受光素子からなる4分割受光素子によって構成されており、時計回りに配置された受光領域A,B,C,Dに入射した光の強度に比例した大きさの検出信号を受光信号(a,b,c,d)として、増幅回路44へ出力する。
【0040】
増幅回路44は、フォトディテクタ43から出力された受光信号(a,b,c,d)をそれぞれ同じ増幅率で増幅して受光信号(a’,b’,c’,d’)を生成して、フォーカスエラー信号生成回路45及びSUM信号生成回路48へ出力する。
【0041】
本実施形態においては、非点収差法によるフォーカスサーボ制御を用いる。フォーカスエラー信号生成回路45は、増幅された受光信号(a’,b’,c’,d’)を用いて、演算によりフォーカスエラー信号を生成する。すなわち、フォーカスエラー信号生成回路45は、(a’+c’)−(b’+d’)の演算を行い、この演算結果をフォーカスエラー信号としてフォーカスサーボ回路46へ出力する。フォーカスエラー信号(a’+c’)−(b’+d’)は、レーザ光の焦点位置のイメージングプレート28の表面からのずれ量を表している。
【0042】
フォーカスサーボ回路46は、コントローラCTにより制御され、フォーカスエラー信号に基づいて、フォーカスサーボ信号を生成してドライブ回路47に出力する。ドライブ回路47は、このフォーカスサーボ信号に応じてフォーカスアクチュエータ40を駆動して、対物レンズ39をレーザ光の光軸方向に変位させる。この場合、フォーカスエラー信号(a’+c’)−(b’+d’)の値が常に一定値(例えば、ゼロ)となるようにフォーカスサーボ信号を生成することにより、イメージングプレート28の表面にレーザ光を集光させ続けることができる。
【0043】
SUM信号生成回路48は、受光信号(a’,b’,c’,d’)を合算してSUM信号(a’+b’+c’+d’)を生成し、A/D変換回路49に出力する。SUM信号の強度は、イメージングプレート28にて反射したレーザ光の強度と輝尽発光により発生した光の強度を合わせた強度に相当するが、イメージングプレート28にて反射したレーザ光の強度はほぼ一定であるので、SUM信号の強度は、輝尽発光により発生した光の強度に相当する。すなわち、SUM信号の強度は、イメージングプレート28に入射した回折X線の強度に相当する。
【0044】
A/D変換回路49は、コントローラCTによって制御され、SUM信号生成回路48からSUM信号を入力し、入力したSUM信号の瞬時値をデジタルデータに変換してコントローラCTに出力する。
【0045】
また、レーザ検出装置PUHは、集光レンズ50及びフォトディテクタ51を備えている。集光レンズ50は、レーザ光源33から出射されたレーザ光の一部であって、偏光ビームスプリッタ37を透過せずに反射したレーザ光をフォトディテクタ51の受光面に集光する。フォトディテクタ51は、受光面に集光された光の強度に応じた受光信号を出力する受光素子である。従って、フォトディテクタ51は、レーザ光源33が出射したレーザ光の強度に対応した受光信号をレーザ駆動回路34へ出力する。
【0046】
また、対物レンズ39に隣接して、LED52が設けられている。LED52は、LED駆動回路53によって制御されて、可視光を発して、イメージングプレート28に撮像された回折環を消去する。
【0047】
LED駆動回路53は、コントローラCTによって制御され、LED52に、所定の強度の可視光を発生させるための駆動信号を供給する。
【0048】
コントローラCTは、CPU、ROM、RAMを備えたマイクロコンピュータを主要部とした電子制御装置である。コントローラCTには、作業者が各種パラメータ、作業指示などを入力するための入力装置54と、作業者に対して各種の設定状況、作動状況、測定結果などを視覚的に知らせるための表示装置55とが接続されている。コントローラCTは、A/D変換回路49から出力されたSUM信号のデジタルデータを処理することによりイメージングプレート28の蛍光体が発した光の強度を検出する。
【0049】
つぎに、上記のように構成したX線回折装置を用いて、測定対象物OBの残留応力を測定する手順について説明する。まず、作業者は、測定対象物OBを昇降機12の昇降ステージ12aに取り付け、昇降ステージ12aを上昇させて、測定対象物OBをフレームFR内にセットする。そして、作業者が、入力装置55を用いて測定対象物OBの材質を入力し、測定開始を指示すると、コントローラCTは、回折環撮像プログラムを実行する。コントローラCTは、図4に示すように、ステップS100にて、回折環撮像処理を開始すると、ステップS102にてイメージングプレート28を低速回転させ、エンコーダ24aからインデックス信号を入力すると、イメージングプレート28の回転を停止させる。これにより、測定開始時において、イメージングプレート28の回転角度が0°に設定される。なお、回折環撮像処理の以降のステップにおいては、イメージングプレート28を回転させない。つぎに、ステップS104にて、イメージングプレート28を回折環撮像位置へ移動させる。
【0050】
つぎに、コントローラCTは、ステップS106にて、センサ信号取り出し回路32の作動を開始させる。つぎに、ステップS108にて、X線の出射を開始させる。これにより、X線が測定対象物OBに照射され、測定対象物OBの表面にて反射したX線が受光センサ31に受光される。つぎに、ステップS110にて、センサ信号取り出し回路32から、受光位置信号を入力し、前記入力した受光位置信号を用いてイメージングプレート28と測定対象物OBとの距離Lを算出する。そして、ステップS112にて、前記算出した距離Lが所定の基準範囲内にあるか否か判定する。距離Lが基準範囲外であれば、「No」と判定して、ステップS114にて、測定対象物OBへのX線の照射を停止させる。
【0051】
そして、ステップS116にて、表示装置54に、測定対象物OBの高さ方向の位置が不適切である旨を表示するとともに、昇降機12の昇降ステージ12aの高さ調整に関する情報を表示する。すなわち、昇降ステージ12aを、どの程度上昇又は下降させるべきかを表示する。そして、後述のステップS126にて、回折環撮像処理を終了する。この場合、作業者は、昇降ステージ12aの高さを調整した後、入力装置55を用いて、再度、測定開始を指示する。上記のステップS108〜S114までの所要時間は僅かなので、イメージングプレート28には回折環が撮像されない。また、受光センサ31が測定対象物OBにて反射したX線を受光しない場合は、ステップS116にて、測定対象物OBの高さ方向の位置が不適切である旨の表示がなされるのみであって、昇降ステージ12aの高さ調整に関する情報は表示されない。この場合、測定対象物OBの位置は、極めて不適切な位置にあると考えられ、昇降ステージ12aの高さ調整の方向を目視で判断できる。
【0052】
一方、ステップS112において、距離Lが所定の基準範囲内である場合には、コントローラCTは、ステップS118に処理を進め、センサ信号取り出し回路32の作動を停止させる。そして、ステップS120にて、時間計測を開始し、ステップS122にて、所定の設定時間を経過したか否かを判定する。時間計測開始から所定の設定時間を経過していなければ、「No」と判定して、ステップS122を再び実行する。すなわち、コントローラCTは、時間計測開始から所定の設定時間を経過するまで待機する。そして、時間計測開始から所定の設定時間を経過すると、「Yes」と判定して、ステップS124にてX線の照射を停止させ、ステップS126にて、回折環撮像処理を終了する。
【0053】
コントローラCTは、イメージングプレート28に回折環を撮像すると、回折環読み取りプログラムを実行する。本実施形態においては、コントローラCTは、テーブル27を回転させながら、イメージングプレート28を回折環読み取り領域内において一定速度で軸受部19側に移動させる。そして、テーブル27の回転角度(すなわち、イメージングプレート28の回転角度)が所定の回転角度になるごとに、A/D変換回路49及び位置検出回路21から、回折X線の強度を表すSUM信号及び移動ステージ15の位置(すなわち、イメージングプレート28の位置)を表す位置信号をそれぞれ取得して記憶する。したがって、図5に示すように、イメージングプレート28の受光面における、SUM信号及び位置信号を取得する読み取りポイントPの軌跡は、螺旋状となる。
【0054】
なお、取得した位置信号は、イメージングプレート28の受光面の中心Oからの距離(すなわち、半径)に相当する。また、各読み取りポイントPに、周方向の位置を表す周方向番号n及び半径方向の位置を表す半径方向番号mを付して、読み取りポイントP(n,m)と表記し、それぞれの読み取りポイントを識別する。すなわち、コントローラCTは、イメージングプレート28が微小角度Δθだけ回転するごとに周方向番号nをインクリメントし、イメージングプレート28が1回転するごとに周方向番号nを初期化する。本実施形態においては、Δθ=(360/N)°とし、所定の回転角度θ(n)(n=1,2・・・N)は、周方向番号が大きくなるに従って、(360/N)°ずつ大きくなる。また、イメージングプレート28が1回転するごとに半径方向番号mをインクリメントする。言い換えれば、半径方向番号mは、イメージングプレート28の周回数に相当する。
【0055】
コントローラCTは、ステップS200にて、図6A及び図6Bに示すように、回折環読み取り処理を開始すると、ステップS202にて、回折環基準半径Rを算出する。回折環基準半径Rは、測定対象物OBの残留応力が「0」である場合の回折環の半径である。回折環基準半径Rは、測定対象物OBの材質及びイメージングプレート28から測定対象物OBまでの距離Lに依存する。すなわち、残留応力が「0」であるので、回折角θaは材質によって決定される。距離Lと回折環基準半径Rとは比例関係にあるので、予め材質ごとに、回折角θaを記憶しておけば、回折環基準半径Rを、R=L・tan(θa)の演算によって算出できる。なお、測定対象物OBの回折角θaが不明である場合には、その測定対象物OBの粉末を測定対象物OBに一様に付着させ、上記の回折環撮像処理を実行して、回折環を撮像すればよい。そして、この回折環の半径と距離Lの関係から回折角θaを求めればよい。
【0056】
つぎに、コントローラCTは、ステップS204にて、位置検出回路21の作動を開始させる。そして、ステップS206にて、イメージングプレート28を回折環読み取り領域内の読み取り開始位置PR1へ移動させる。図7に示すように、イメージングプレート28が読み取り開始位置PR1にあるとき、中心Oから対物レンズ39の中心までの距離は、回折環基準半径Rよりも距離αだけ小さい。すなわち、読み取り開始位置PR1は、移動ステージ15が駆動限界位置にあるときの中心O(図7において破線で示す位置)から対物レンズ39の中心までの距離を距離RRとすると、PR1=R−RR−αなる演算により算出される。ここで、距離αは、撮像した回折環の半径が回折環基準半径Rからずれる可能性のある距離よりもやや大きい距離である。
【0057】
つぎに、コントローラCTは、ステップS208にて、イメージングプレート28の回転を開始させる。そして、ステップS210にて、レーザ光の照射を開始させる。つぎに、ステップS212にて、増幅回路44、フォーカスエラー信号生成回路45、フォーカスサーボ回路46及びドライブ回路47の作動を開始させ、フォーカス引き込みを行って、フォーカスサーボ制御を開始する。つぎに、ステップS214にて、回転角度検出回路26及びA/D変換回路49の作動を開始させる。そして、ステップS216にて、イメージングプレート28の移動を開始させる。すなわち、フィードモータ制御回路22に移動開始指令及び移動速度を出力し、イメージングプレート28を、読み取り開始位置PR1から軸受部19側へ、一定速度で移動させる。
【0058】
コントローラCTは、ステップS218にて、周方向番号n及び半径方向番号mの値をそれぞれ「1」に初期化する。読み取りポイントP(1,1)は、イメージングプレート28が読み取り開始位置PR1にあるときの読み取りポイントである。つぎに、コントローラCTは、ステップS220にて、エンコーダ24aのインデックス信号を入力したか否かを判定する。インデックス信号を入力していなければ、「No」と判定して、再びステップS220を実行する。すなわち、コントローラCTは、インデックス信号を入力するまで待機する。そして、インデックス信号を入力すると、コントローラCTは「Yes」と判定して、ステップS222にて、回転角度検出回路26から、イメージングプレート28の現在の回転角度θpを取り込む。そして、ステップS224にて、現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値未満であるか否か判定する。現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値以上であるときは、「No」と判定して、ステップS222及びステップS224を再び実行する。すなわち、コントローラCTは、現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値未満になるまで待機する。そして、現在の回転角度θpと所定の回転角度θ(n)との差が所定の許容値未満になると、ステップS226にて、A/D変換回路49からSUM信号を取り込むとともに、位置検出回路21から位置信号を取り込んで、読み取りポイントP(n,m)の信号強度S(n,m)及び半径値r(n,m)としてメモリに記憶する。
【0059】
つぎに、コントローラCTは、ステップS228にて、前記記憶した信号強度S(n,m)が、所定の基準値以上であるか否か判定する。信号強度S(n,m)が所定の基準値以上であるときは、「Yes」と判定して、処理を後述のステップS232に進める。一方、信号強度S(n,m)が、所定の基準値より小さいときは、「No」と判定して、ステップS230にて、前記記憶した信号強度S(n,m)及び半径値r(n,m)を消去する。そして、ステップS232にて、周方向番号nの値をインクリメントして、ステップS234にて、イメージングプレート28が1回転したか否かを判定する。すなわち、周方向番号nが最大値Nより大きいか否かを判定する。周方向番号nが最大値N以下であるときは、「No」と判定して、ステップS222に戻る。
【0060】
一方、周方向番号nが最大値Nよりも大きいときは、「Yes」と判定して、ステップS236にて、後述の回折環検出プログラムによる終了指令の有無を判定する。未だ終了指令がないときは、「No」と判定して、ステップS238にて、半径方向番号mをインクリメントし、ステップS240にて、周方向番号nを「1」に設定して、ステップS220に戻る。ステップS220〜S240の処理を繰り返すことで、信号強度S(n,m)及び半径値r(n,m)のデータが回転角度θ(n)に対応付けられて記憶される。すなわち、イメージングプレート28の回転角度θ(n)及び半径値r(n,m)で表される位置の回折X線の強度が記憶される。一方、回折環測定プログラムにより終了指令が発せられたときは、ステップS242(図6B)にて、フォーカスサーボ制御を停止し、ステップS244にて、レーザ光の照射を停止する。つぎに、ステップS246にて、A/D変換回路49及び回転角度検出回路26の作動を停止させる。そして、ステップS248にて、イメージングプレート28の移動を停止させ、ステップS250にて、回折環読み取り処理を終了する。
【0061】
コントローラCTは、回折環読み取り処理を終了すると、イメージングプレート28に撮像された回折環を消去する回折環消去プログラムを実行する。コントローラCTは、図8示すように、ステップS300にて回折環消去処理を開始すると、ステップS302にて、イメージングプレート28を回折環消去領域内の消去開始位置PE1へ移動させる。図9Aに示すように、イメージングプレート28が消去開始位置PE1にあるとき、中心OからLED52までの距離は、回折環基準半径Rよりも距離γだけ小さい。すなわち、消去開始位置PE1は、移動ステージ15が駆動限界位置にあるときの中心OとLED52の距離を距離REとすると、PE1=R−RE−γなる演算により算出される。ここで、距離γは、回折環を確実に消去できるように、距離αよりも大きく設定されている。
【0062】
つぎに、コントローラCTは、ステップS304にて、LED52の発光を開始させ、ステップS306にて、イメージングプレート28の移動を開始させる。そして、ステップS308にて位置検出回路21から位置信号を入力する。そして、ステップS310にて、イメージングプレート28の現在の位置が消去終了位置PE2を超えているか否かを判定する。図9Bに示すように、イメージングプレート28が消去終了位置PE2にあるとき、中心OからLED52までの距離は、回折環基準半径Rよりも距離γだけ大きい。すなわち、消去終了位置PE2は、PE2=R−RE+γなる演算により算出される。イメージングプレート28が消去終了位置PE2を超えていなければ、ステップS308に戻る。すなわち、コントローラCTは、イメージングプレート28が、消去終了位置PE2を超えるまで待機する。そして、イメージングプレート28が、消去終了位置PE2を超えると、ステップS310にて「Yes」と判定して、ステップS312にて、イメージングプレート28の回転及び移動を停止する。つぎに、ステップS314にて、LED52の発光を停止し、ステップS316にて、回折環消去処理を終了する。
【0063】
また、コントローラCTは、上記の回折環読み取りプログラムと並行して、回転角度θ(n)ごとにSUM信号の値がピーク(極大)となるピーク半径rp(n)を検出して回折環の形状を検出する回折環形状検出プログラムを実行する。コントローラCTは、図10に示すように、ステップS400にて、回折環形状検出処理を開始すると、ステップS402にて、周方向番号nを「1」に初期化する。つぎに、ステップS404にて、回転角度θ(n)におけるピーク半径rp(n)を検出済みか否か判定する。回転角度θ(n)におけるピーク半径rp(n)を検出済みであるときは、「Yes」と判定して、ステップS406にて、周方向番号nをインクリメントし、ステップS408にて周方向番号nが最大値Nより大きいか否かを判定する。周方向番号nが最大値N以下であるときは、「No」と判定してステップS404に戻り、周方向番号nが最大値Nより大きければ「Yes」と判定してステップS402に戻る。
【0064】
一方、回転角度θ(n)におけるピーク半径rp(n)を未検出であれば、「No」と判定して、ステップS410にて、イメージングプレート28の回転角度が回転角度θ(n)であるときに記憶した信号強度S(n,m)の数が所定の基準数以上であるか否か判定する。ただし、ステップS230において、消去された信号強度S(n,m)は、イメージングプレート28の回転角度が回転角度θ(n)であるときに記憶した信号強度S(n,m)としてカウントしない。前記記憶した信号強度S(n,m)の数が所定の基準数より少ないときは、「No」と判定して、コントローラCTは処理をステップS406へ進める。
【0065】
一方、前記記憶した信号強度S(n,m)の数が所定の基準数以上であるときは、「Yes」と判定して、ステップS412にて、回転角度θ(n)に対応付けられて記憶されている全ての半径値r(n,m)及び信号強度S(n,m)を用いて、SUM信号の値のピークの有無を判定する。すなわち、図11に示すように、半径値r(n,m)と信号強度S(n,m)との関係を表した受光曲線において、ピークが存在しなければ、「No」と判定して、ステップS406に戻る。このように、ステップS402〜S412を繰り返し実行している間に、並行して実行されている回折環読み取り処理により、さらに半径値r(n,m)及び信号強度S(n,m)が取り込まれてメモリに記憶される。そして、ステップS412にてピークを検出すると、「Yes」と判定して、ステップS414にて、ピークの半径値をピーク半径rp(n)としてメモリに記憶する。つぎに、ステップS416にて、取得したピーク半径の数が所定の基準数以上であるか否かを判定する。取得したピーク半径の数が所定の基準数より少なければ、「No」と判定して、ステップS406に戻る。このようにステップS402〜S416を繰り返すことで、取得したピーク半径の数が増えていき、基準数に達すると、ステップS416にて「Yes」と判定して、ステップS418にて、回折環読み取り処理を終了させる終了指令を出力し、ステップS420にて、回折環形状検出処理を終了する。なお、所定の基準数は、周方向番号nの最大値Nであり、ステップS416にて「Yes」と判定することは、周方向の全てのポイントにてピーク半径が取得されたことを意味する。
【0066】
コントローラCTは、回折環形状検出処理を終了すると、ピーク半径rp(n)を用いて、cosα法により、残留応力を算出し、回折環の画像データ及び算出した残留応力のデータを作成して、表示装置54に出力する。表示装置54は、入力したデータに従って、回折環の画像及び残留応力の数値を表示する。
【0067】
上記のように構成したX線回折装置においては、測定対象物OBにて回折した回折X線をイメージングプレート28によって受光して、回折環を撮像し、イメージングプレート28を回転させながら半径方向に移動させるとともに、レーザ検出装置PUHからレーザを照射して、照射位置から発生する光の強度を回転角度及び半径位置と共に検出することで、回折環における回折X線の強度を検出するようにした。したがって、X線CCDを用いて回折光を受光する装置に比べてコストダウンでき、回折X線の強度のピーク位置を精度よく検出できる。また、上記従来のX線回折装置においては、回折環を撮像したイメージングプレート28をX線照射装置から取り外して、読み取り装置にセットする必要があったが、本実施形態に係るX線回折装置によれば、このような手間を省くことができる。また、一度、回折環の中心を検出すれば、その後の測定においては、前記検出した回折環の中心を用いることができる。したがって、回折環の形状を短時間で検出できる。
【0068】
また、受光センサ31によって、距離Lを計測して、回折環基準半径Rを算出するようにした。そして、測定対象物OBの回折環の半径が、回折環基準半径Rからずれる可能性のある領域についてのみレーザ光を照射して、輝尽発光現象によりイメージングプレート28から発せられた光を含む、フォトディテクタ43に入射した光の強度を検出するようにした。したがって、回折環の形状を短時間で検出できる。
【0069】
また、回折環形状検出処理において、回折環の形状を検出するのに十分な読み取りデータを記憶した時点で、回折環読み取り処理を停止させるようにした。したがって、回折環の形状を短時間で検出できる。
【0070】
また、回折環読み取り処理において、回折環の形状を表すデータとして不必要であると考えられるデータを消去(すなわち、照射したレーザ光の反射光の強度に相当するSUM信号の強度よりやや大きい強度を基準値とし、この基準値以上のSUM信号強度のみを取得)するようにした。これによれば、回折環形状検出処理において処理するデータ数を少なくできるので、回折環の形状を短時間で検出できる。
【0071】
さらに、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0072】
上記実施形態においては、イメージングプレート28の回転角度が所定の回転角度になるごとに、信号強度S(n,m)及び半径値r(n,m)を記憶するようにした。しかし、これに代えて、半径値rが所定の値になるごとに信号強度S(n,m)及びイメージングプレート28の回転角度θ(n,m)を記憶するようにしてもよい。この場合、回折環形状検出処理においては、所定の回転角度における半径方向の信号強度Sの変化を補間法により算出すればよい。これによっても、上記実施形態と同様の効果が得られる。
【0073】
また、所定の時間間隔で、イメージングプレート28の回転角度θ(n,m)、信号強度S(n,m)及び半径値r(n,m)を取得して記憶してもよい。この場合も、回折環形状検出処理においては、所定の回転角度における半径方向の信号強度Sの変化を補間法により算出すればよい。これによっても、上記実施形態と同様の効果が得られる。
【0074】
また、上記実施形態においては、受光センサ31によって受光した反射光の受光位置を用いて、測定対象物OBの高さ方向の位置が、所定の範囲内にあるか否かを判定し、所定の範囲内になければ、作業者が昇降ステージ12aの高さを調整するようにした。しかし、受光センサ31の受光位置が表す測定対象物OBの高さ方向の位置が所定の範囲内にあるように、昇降ステージ12aの高さが自動的に調整されるように構成してもよい。これによれば、作業者がセットした測定対象物OBの高さ方向の位置が、受光センサ31が反射光を受光できる範囲にありさえすれば、作業者が昇降ステージ12aの高さを調整する必要が無いので、作業効率を向上させることができる。なお、例えば上記従来のX線検出装置のように、イメージングプレートと測定対象物との距離が常に一定になるように構成されていれば、受光センサ31は不要である。
【0075】
また、上記実施形態においては、受光センサ31の受光位置を用いて、回折環基準半径Rを算出し、撮像した回折環の半径が回折環基準半径Rからずれる可能性のある領域を想定して、読み取り開始位置PR1を決定するようにした。しかし、回折環基準半径Rを算出することなく、常に一定の領域にレーザ光を照射するようにしてもよい。例えば、イメージングプレート28の全領域にレーザ光を照射するようにしてもよい。また、LED53による可視光の照射についても同様に、常に一定の領域にLED53から発せられた可視光を照射するようにしてもよい。例えば、イメージングプレート28の全領域にLED53からの可視光を照射するようにしてもよい。ただし、この場合、上記実施形態よりも測定時間が長くなる。
【0076】
また、上記実施形態においては、レーザ検出装置PUHは、フォーカスサーボ制御されるようにしたが、イメージングプレート28を回転させた際のイメージングプレート28の受光面と対物レンズ39との距離の変動が微小であれば、フォーカスサーボ制御は不要である。
【0077】
また、上記実施形態においては、イメージングプレート28に照射されるレーザ光は、一定強度のレーザ光としたが、これに代えて、予め設定されたハイレベルの強度と、予め設定されたローレベルの強度が繰り返されるパルス状のレーザ光とし、ハイレベルの強度になるタイミングでSUM信号の瞬時値を取得するようにしてもよい。これによれば、イメージングプレート28のSUM信号の瞬時値を取得するポイントに瞬間的にハイレベルの強度のレーザ光を照射することができる。すなわち、SUM信号の瞬時値を取得するポイントにレーザ光がさしかかった状態では、レーザ光の強度はローレベルであり、輝尽発光により発生する光はほとんど無い。そして、SUM信号の瞬時値を取得するポイントとレーザ光の照射ポイントが一致したときにレーザ光の強度がハイレベルになって輝尽発光による光が発生する。常にハイレベルの強度のレーザ光を照射した場合は、輝尽発光による光が生じ続けることで光の強度が減少するが、上記のように構成すれば、輝尽発光によって光が生じたタイミングとほぼ同じタイミングでSUM信号の瞬時値を取得することができる。したがって、SUM信号の瞬時値を取得するタイミングにおいて輝尽発光により発生する光の強度を、より回折X線の強度に近似させることができる。
【符号の説明】
【0078】
13…X線照射器、15…移動ステージ、18…フィードモータ、21・・・位置検出回路、24・・・スピンドルモータ、26…回転角度検出回路、27…テーブル、28…イメージングプレート、31…受光センサ、45・・・フォーカスエラー信号生成回路、46・・・フォーカスサーボ回路、47・・・ドライブ回路、48・・・SUM信号生成回路、PUH…レーザ検出装置、CT…コントローラ、OB…測定対象物
【特許請求の範囲】
【請求項1】
測定対象物に向けてX線を出射するX線出射器と、
中央に前記X線を通過させる貫通孔が形成されたテーブルと、
前記テーブルに固定されていて、前記測定対象物にて回折した前記X線の回折光を受光する受光面を有し、前記回折光の像である回折環を記録する回折光受光器と、
前記回折光受光器の受光面にレーザ光を照射するとともに、前記レーザ光の照射によって前記回折光受光器から出射された光の強度を検出するレーザ検出装置と、
前記テーブルを、前記貫通孔の中心軸回りに回転させる回転手段と、
前記テーブルを、前記回折光受光器の受光面に平行な方向に、前記レーザ検出装置に対して相対的に移動させる移動手段と、
前記回転手段によって前記テーブルが回転され、かつ前記移動手段によって前記テーブルが移動されている状態で、前記レーザ検出装置によって繰り返し検出された光の強度を、それぞれの光の強度の検出時における前記テーブルの回転角度及び前記レーザ検出装置に対する前記テーブルの相対位置に関連付けて複数の読み取りデータとしてそれぞれ記憶するデータ読み取り手段と、
前記記憶した複数の読み取りデータを用いて前記回折環の形状を検出する回折環形状検出手段を備えたことを特徴とするX線回折装置。
【請求項2】
請求項1に記載のX線回折装置において、
前記X線出射器から出射されて前記測定対象物にて反射した反射X線を受光して、前記回折光受光器から前記測定対象物までの距離に関連した受光信号を出力する反射X線受光器をさらに備え、
前記データ読み取り手段は、前記受光信号に基づいて、前記レーザ検出装置によって検出された光の強度を前記読み取りデータとして記憶し始めるときの前記レーザ検出装置に対する前記テーブルの相対位置を設定することを特徴とするX線回折装置。
【請求項3】
請求項1又は2に記載のX線回折装置において、
前記回折環形状検出手段は、前記テーブルの所定の回転角度ごとに、前記回折光受光器の受光面の半径方向の位置と前記レーザ検出装置によって検出した光の強度との関係を表した受光曲線における、前記検出した光の強度のピークの有無を検出し、前記ピークを有する受光曲線が所定数以上存在するとき、前記データ読み取り手段による前記検出した光の強度の前記読み取りデータとしての記憶を終了させることを特徴とするX線回折装置。
【請求項4】
請求項1乃至3のうちのいずれか1つに記載のX線回折装置において、
前記回折環形状検出手段は、前記レーザ検出装置によって検出された光の強度が所定の基準値より大きいとき、前記光の強度に対応した読み取りデータを前記回折環の形状を検出するためのデータとして採用し、前記レーザ検出装置によって検出された光の強度が所定の基準値以下であるとき、前記光の強度に対応した読み取りデータを前記回折環の形状を検出するためのデータとして採用しないことを特徴とするX線回折装置。
【請求項5】
請求項1乃至4のうちのいずれか1つに記載のX線回折装置において、
前記テーブルの回転角度を検出する回転角度検出手段と、
前記レーザ検出装置に対する前記テーブルの相対位置を検出する位置検出手段とを備え、
前記データ読み取り手段は、前記回転角度検出手段によって検出した前記テーブルの回転角度が所定の角度になるごとに、前記レーザ検出装置によって検出した光の強度及び前記位置検出手段によって検出した前記レーザ検出装置に対する前記テーブルの相対位置を1組の読み取りデータとして記憶することを特徴とするX線回折装置。
【請求項6】
請求項1乃至4のうちのいずれか1つに記載のX線回折装置において、
前記テーブルの回転角度を検出する回転角度検出手段と、
前記レーザ検出装置に対する前記テーブルの相対位置を検出する位置検出手段とを備え、
前記データ読み取り手段は、前記位置検出手段によって検出した前記レーザ検出装置に対する前記テーブルの相対位置が所定の位置になるごとに、前記レーザ検出装置によって検出した光の強度及び前記回転角度検出手段によって検出した前記テーブルの回転角度を1組の読み取りデータとして記憶することを特徴とするX線回折装置。
【請求項7】
請求項1乃至4のうちのいずれか1つに記載のX線回折装置において、
前記テーブルの回転角度を検出する回転角度検出手段と、
前記レーザ検出装置に対する前記テーブルの相対位置を検出する位置検出手段とを備え、
前記データ読み取り手段は、一定の時間間隔で前記レーザ検出装置によって検出した光の強度、前記回転角度検出手段によって検出した前記テーブルの回転角度、及び前記位置検出手段によって検出した前記レーザ検出装置に対する前記テーブルの相対位置を1組の読み取りデータとして記憶することを特徴とするX線回折装置。
【請求項8】
請求項1乃至7のうちのいずれか1つに記載のX線回折装置において、
前記レーザ検出装置は、
前記回折光受光器の受光面に照射するレーザ光を出射するレーザ出射器と、
前記レーザ出射手段から出射されたレーザ光を集光する対物レンズと、
前記対物レンズを前記レーザ光の光軸方向に移動させるアクチュエータと、
受光した光の強度及び形状に応じた受光信号を出力するフォトディテクタと、
前記回折光受光器の受光面のレーザ光照射位置から入射した光を前記フォトディテクタに導くとともに、前記レーザ光の焦点と前記回折光受光器の受光面とのずれに応じて、前記フォトディテクタの受光面に形成される受光した光の形状を異ならせる光学部品とを備え、
前記データ読み取り手段は、
前記フォトディテクタから出力された受光信号に基づいて、前記対物レンズによって集光された前記レーザ光の焦点と前記回折光受光器の受光面とのずれに相当するエラー信号を生成し、前記エラー信号に基づいて、前記レーザ光の焦点と前記回折光受光器の受光面とが一致するように前記アクチュエータを駆動する駆動手段を備えたことを特徴とするX線回折装置。
【請求項1】
測定対象物に向けてX線を出射するX線出射器と、
中央に前記X線を通過させる貫通孔が形成されたテーブルと、
前記テーブルに固定されていて、前記測定対象物にて回折した前記X線の回折光を受光する受光面を有し、前記回折光の像である回折環を記録する回折光受光器と、
前記回折光受光器の受光面にレーザ光を照射するとともに、前記レーザ光の照射によって前記回折光受光器から出射された光の強度を検出するレーザ検出装置と、
前記テーブルを、前記貫通孔の中心軸回りに回転させる回転手段と、
前記テーブルを、前記回折光受光器の受光面に平行な方向に、前記レーザ検出装置に対して相対的に移動させる移動手段と、
前記回転手段によって前記テーブルが回転され、かつ前記移動手段によって前記テーブルが移動されている状態で、前記レーザ検出装置によって繰り返し検出された光の強度を、それぞれの光の強度の検出時における前記テーブルの回転角度及び前記レーザ検出装置に対する前記テーブルの相対位置に関連付けて複数の読み取りデータとしてそれぞれ記憶するデータ読み取り手段と、
前記記憶した複数の読み取りデータを用いて前記回折環の形状を検出する回折環形状検出手段を備えたことを特徴とするX線回折装置。
【請求項2】
請求項1に記載のX線回折装置において、
前記X線出射器から出射されて前記測定対象物にて反射した反射X線を受光して、前記回折光受光器から前記測定対象物までの距離に関連した受光信号を出力する反射X線受光器をさらに備え、
前記データ読み取り手段は、前記受光信号に基づいて、前記レーザ検出装置によって検出された光の強度を前記読み取りデータとして記憶し始めるときの前記レーザ検出装置に対する前記テーブルの相対位置を設定することを特徴とするX線回折装置。
【請求項3】
請求項1又は2に記載のX線回折装置において、
前記回折環形状検出手段は、前記テーブルの所定の回転角度ごとに、前記回折光受光器の受光面の半径方向の位置と前記レーザ検出装置によって検出した光の強度との関係を表した受光曲線における、前記検出した光の強度のピークの有無を検出し、前記ピークを有する受光曲線が所定数以上存在するとき、前記データ読み取り手段による前記検出した光の強度の前記読み取りデータとしての記憶を終了させることを特徴とするX線回折装置。
【請求項4】
請求項1乃至3のうちのいずれか1つに記載のX線回折装置において、
前記回折環形状検出手段は、前記レーザ検出装置によって検出された光の強度が所定の基準値より大きいとき、前記光の強度に対応した読み取りデータを前記回折環の形状を検出するためのデータとして採用し、前記レーザ検出装置によって検出された光の強度が所定の基準値以下であるとき、前記光の強度に対応した読み取りデータを前記回折環の形状を検出するためのデータとして採用しないことを特徴とするX線回折装置。
【請求項5】
請求項1乃至4のうちのいずれか1つに記載のX線回折装置において、
前記テーブルの回転角度を検出する回転角度検出手段と、
前記レーザ検出装置に対する前記テーブルの相対位置を検出する位置検出手段とを備え、
前記データ読み取り手段は、前記回転角度検出手段によって検出した前記テーブルの回転角度が所定の角度になるごとに、前記レーザ検出装置によって検出した光の強度及び前記位置検出手段によって検出した前記レーザ検出装置に対する前記テーブルの相対位置を1組の読み取りデータとして記憶することを特徴とするX線回折装置。
【請求項6】
請求項1乃至4のうちのいずれか1つに記載のX線回折装置において、
前記テーブルの回転角度を検出する回転角度検出手段と、
前記レーザ検出装置に対する前記テーブルの相対位置を検出する位置検出手段とを備え、
前記データ読み取り手段は、前記位置検出手段によって検出した前記レーザ検出装置に対する前記テーブルの相対位置が所定の位置になるごとに、前記レーザ検出装置によって検出した光の強度及び前記回転角度検出手段によって検出した前記テーブルの回転角度を1組の読み取りデータとして記憶することを特徴とするX線回折装置。
【請求項7】
請求項1乃至4のうちのいずれか1つに記載のX線回折装置において、
前記テーブルの回転角度を検出する回転角度検出手段と、
前記レーザ検出装置に対する前記テーブルの相対位置を検出する位置検出手段とを備え、
前記データ読み取り手段は、一定の時間間隔で前記レーザ検出装置によって検出した光の強度、前記回転角度検出手段によって検出した前記テーブルの回転角度、及び前記位置検出手段によって検出した前記レーザ検出装置に対する前記テーブルの相対位置を1組の読み取りデータとして記憶することを特徴とするX線回折装置。
【請求項8】
請求項1乃至7のうちのいずれか1つに記載のX線回折装置において、
前記レーザ検出装置は、
前記回折光受光器の受光面に照射するレーザ光を出射するレーザ出射器と、
前記レーザ出射手段から出射されたレーザ光を集光する対物レンズと、
前記対物レンズを前記レーザ光の光軸方向に移動させるアクチュエータと、
受光した光の強度及び形状に応じた受光信号を出力するフォトディテクタと、
前記回折光受光器の受光面のレーザ光照射位置から入射した光を前記フォトディテクタに導くとともに、前記レーザ光の焦点と前記回折光受光器の受光面とのずれに応じて、前記フォトディテクタの受光面に形成される受光した光の形状を異ならせる光学部品とを備え、
前記データ読み取り手段は、
前記フォトディテクタから出力された受光信号に基づいて、前記対物レンズによって集光された前記レーザ光の焦点と前記回折光受光器の受光面とのずれに相当するエラー信号を生成し、前記エラー信号に基づいて、前記レーザ光の焦点と前記回折光受光器の受光面とが一致するように前記アクチュエータを駆動する駆動手段を備えたことを特徴とするX線回折装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9A】
【図9B】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9A】
【図9B】
【図10】
【図11】
【公開番号】特開2012−225796(P2012−225796A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94117(P2011−94117)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000112004)パルステック工業株式会社 (179)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000112004)パルステック工業株式会社 (179)
【Fターム(参考)】
[ Back to top ]