
X線検査装置およびX線検査方法
【課題】対象物の検査を短時間で精度よく行なえる装置を提供する。
【解決手段】X線検査装置100は、走査型X線源10と、複数のX線検出器23.1〜23.Nと、画像取得制御機構30と、演算部70と、メモリ90とを備える。走査型X線源10は、検査対象20に向けてX線を出力する。X線検出器23.1〜23.Nは、検査対象20を透過したX線を検出する。画像取得制御機構30は、X線検出器23.1〜23.Nが検出した画像データ98をメモリ90に格納する。演算部70に含まれる再構成部76は、画像データ98に基づいて、解析法を用いて水平断面の再構成画像を生成し、反復法を用いて垂直断面の再構成画像を生成する。
【解決手段】X線検査装置100は、走査型X線源10と、複数のX線検出器23.1〜23.Nと、画像取得制御機構30と、演算部70と、メモリ90とを備える。走査型X線源10は、検査対象20に向けてX線を出力する。X線検出器23.1〜23.Nは、検査対象20を透過したX線を検出する。画像取得制御機構30は、X線検出器23.1〜23.Nが検出した画像データ98をメモリ90に格納する。演算部70に含まれる再構成部76は、画像データ98に基づいて、解析法を用いて水平断面の再構成画像を生成し、反復法を用いて垂直断面の再構成画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、X線検査装置およびX線検査方法に関する。特に、X線照射を用いて対象物を検査するための再構成画像の生成方法であって、X線検査方法、X線検査装置に適用しうる技術に関する。
【背景技術】
【0002】
現在、様々な分野の検査において、X線CT(Computed Tomography)が用いられている。CTは、撮像された対象物の2次元データ(投影画像)から対象物の3次元のデータを生成(再構成)する技術である。CTを用いた検査では、対象物の立体的な形状、対象物をいろいろな角度から見た画像など、2次元データからは得られない情報が得られる。
【0003】
近年では、X線CTは、プリント基板(PCB;Printed Circuit Board)の検査に用いられている。PCBの検査について、図21を参照して説明する。図21は、PCBの検査について説明するための図である。
【0004】
図21Aは、電子部品が実装された基板の斜視図である。基板1601上に、第1の部品1602と、第2の部品1603とが実装されている。第2の部品1603は、BGA(Ball Grid Array)1604等により、基板1601に物理的および電気的に接続されている。
【0005】
図21Bは、基板1601と第2の部品1603との接続箇所を基板1601の面に垂直な断面で切った断面図である。BGA1604は、第2の部品1603と基板1601の表面層1605とを接続する。BGA1604は、加熱され、加熱後の状態1606に変形する。ただし、加熱後の状態1606にボイド1607が生じる場合がある。また、複数の半田ボールが結合しブリッジ1608を形成する場合もある。
【0006】
PCBの検査では、加熱後の状態1606のぬれ性、ボイド1607およびブリッジ1608の有無、異物の有無などを検査する。半田接合面の検査には、公知技術として、各種装置に搭載されている技術を用いることができる。ここでは、断層内の半田面積で判定する一般的な方法を示す。
【0007】
検査装置は、3次元データを生成し、3次元データを切り出して断層画像を作成する。検査装置は、作成した断層画像を2値化し、画像を半田とそれ以外に分離した2値化画像を取得する。この2値化処理には、判別分析法等の一般的な2値化処理を用いることが可能である。検査装置は、2値化画像から白(もしくは1)の部分のラベリングを行ない、半田を区別したラベリング画像を取得する。このラベリング処理には、ラスタスキャンによって連結の有無を判定するような一般的なラベリング処理を用いることが可能である。
【0008】
基板1601の面に平行な断面の一例を、図21Cに示す。図21Cは、図21Bにおいて破線で示した断面で切った接続箇所の断面図である。図21Cでは、半田を白、半田以外を斜線で示している。ここでは、正常、ボイド、ブリッジの3種類の状態を示した。図21Cを参照して、ボイド1607がある場合、半田内に半田がない部分が生じる。ブリッジ1608がある場合、正常時に比べ広範な領域に半田が観察される。
【0009】
検査装置は、ラベリング画像からそれぞれの半田の面積(白もしくは1の画素の個数)を計数し、半田の面積を求める。検査装置は、面積が一定の範囲内であれば良品、それ以外であれば不良とすることで、半田接合面の良否を判定する。この一定の範囲の閾値は、予めユーザにより設定されることが一般的である。
【0010】
例えば、特許文献1(特開2008−026344号公報)などには、プリント基板の検査装置が開示されている。プリント基板の検査装置の概略を図22および図23に示す。図22は、特許文献1に記載の検査装置を模式的に示す図である。図23は、X線源およびX線検出器を移動させてプリント基板を検査する検査装置の模式図である。図22および図23に示すように、プリント基板の検査装置は、プリント基板が搬送される面に対して斜めの方向からプリント基板にX線を照射する。
【0011】
ところで、一般的には、X線CTにより高画質な画像を得るためには、あらゆる方向からのX線の透視撮像を行なうことが望ましい。特許文献2(特開2006−25868号公報)には、周囲の全方向から被検体を撮像する医療用途のX線CTシステムが開示されている。
【0012】
一方、特許文献3(特開2007−139620号公報)には、コーンビーム角が大きい場合に対して有効なデータ再構成法が開示されている。特許文献3に記載のX線コーンビームCT装置は、ラドン空間のシャドウゾーンのデータを計算により補完する。
【特許文献1】特開2008−026344号公報
【特許文献2】特開2006−25868号公報
【特許文献3】特開2007−139620号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
特許文献1に記載のような検査装置では、PCBのような薄い対象物のX線CT検査を短時間で精度よく行なえなかった。したがって、PCBなどのインライン検査を実現することは困難であった。これは、X線CT検査において、撮像データの枚数と再構成データの解像度とにはトレードオフの関係があるためである。斜めCT撮像では、長軸方向からみたPCBについてのデータ(以下、垂直断面データとよぶこともある)が不足するため、再構成データの垂直断面画像の解像度が悪くなる。
【0014】
しかし、PCBの検査において、特許文献2に記載の医療検査のように対象物を周囲の全方向から撮像することは、検査時間の観点から、現実的ではない。また、PCBの長軸方向(以下、水平方向とよぶこともある)に高密度に実装されている極小の電子部品を高解像度で撮像することは困難である。
【0015】
また、特許文献3に記載の手法は、広角コーンビームCTに関するものである。特許文献3に記載の補完方法を、PCB検査に応用することは容易ではない。
【0016】
本発明は、上記のような問題を解決するためになされたものであって、対象物の検査を短時間で精度よく行なえる装置を提供することを課題とする。
【課題を解決するための手段】
【0017】
1つの局面に係る本願発明は、X線を用いて対象物を検査するX線検査装置であって、X線が対象物に複数の方向から入射するようにX線を出力するX線出力手段と、各方向から対象物に入射して対象物を透過したX線が届く位置においてX線を撮像するX線検出手段と、各位置で撮像したX線の強度分布データに基づき、対象物の複数の再構成画像データを生成する再構成手段とを備え、再構成手段は、第1の方向を法線方向とする面に対応する第1の再構成画像データを生成する第1の再構成手段を含み、第1の再構成手段は、第1の再構成画像データの生成処理において、解析法を用い、第1の方向とは異なる第2の方向を法線方向とする面に対応する対象物の第2の再構成画像データを生成する第2の再構成手段をさらに含み、第2の再構成手段は、第2の再構成画像データの生成処理において、反復法を用いる。
【0018】
好ましくは、再構成手段は、第1の再構成画像データの生成および第2の再構成画像データの生成を並行して行なう。
【0019】
好ましくは、第2の構成手段は、第1の再構成画像データを反復法の初期画像として第2の再構成画像データを生成する。
【0020】
好ましくは、再構成手段は、解析法による再構成3次元データに基づいて、第2の再構成手段が第2の再構成画像データを生成する領域を決定する決定手段をさらに含み、第2の再構成手段は、決定された領域について、第2の再構成画像データを生成する。
【0021】
好ましくは、X線出力手段は、X線が第2の方向を除く方向から対象物に入射するようにX線を出力する。
【0022】
好ましくは、対象物を法線方向が実質的に第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、X線出力手段は、搬送面の第1の側からX線を出力し、X線検出手段は、搬送面の第1の側とは異なる第2の側でX線を撮像する。
【0023】
好ましくは、対象物は、平面状の物体であり、第2の方向は、実質的に、対象物の面の法線方向であり、X線出力手段は、対象物の面に所定の角度で交わる方向からX線が対象物に入射するようにX線を出力する。
【0024】
さらに好ましくは、対象物は、平面状の物体であり、第2の方向は、実質的に、対象物の面の法線方向であり、決定手段は、解析法による再構成3次元データの対象物の面に実質的に平行な複数の断面の画素分布に基づいて、第2の再構成画像データを生成する領域を第2の方向について限定する。
【0025】
さらに好ましくは、対象物を法線方向が実質的に第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、搬送機構は、対象物を挟む一対のレールを含む。
【0026】
他の局面に係る本願発明は、X線を用いて対象物を検査するX線検査方法であって、X線が対象物に複数の方向から入射するようにX線を出力するステップと、各方向から対象物に入射して対象物を透過したX線が届く位置においてX線を撮像するステップと、各位置で撮像したX線の強度分布データに基づき、対象物の複数の再構成画像データを生成するステップとを備え、再構成画像データを生成するステップは、第1の方向を法線方向とする面に対応する第1の再構成画像データを生成するステップを含み、第1の再構成画像データを生成するステップは、第1の再構成画像データの生成処理において、解析法を用いるステップを有し、再構成画像データを生成するステップは、第1の方向とは異なる第2の方向を法線方向とする面に対応する対象物の第2の再構成画像データを生成するステップをさらに含み、第2の再構成画像データを生成するステップは、第2の再構成画像データの生成処理において、反復法を用いるステップを有する。
【発明の効果】
【0027】
本発明によれば、第1の方向を法線方向とする面に対応する再構成画像データを解析法を用いて生成し、第1の方向と異なる第2の方向を法線方向とする面に対応する再構成画像データを反復法を用いて生成する。その結果、対象物を短時間で精度よく検査することができる。
【発明を実施するための最良の形態】
【0028】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部分には同一の符号を付してある。それらの名称および機能も同じである。したがってそれらについての詳細な説明は繰り返さない。
【0029】
[第1の実施の形態]
(1.X線検査装置について)
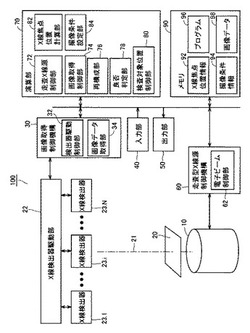
図1は、本発明に係るX線検査装置100の概略ブロック図である。図1を参照して、本発明に係るX線検査装置100について説明する。ただし、以下で記載されている構成、寸法、形状、その他の相対配置などは、特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
【0030】
X線検査装置100は、中心軸を軸21としてX線を出力する走査型X線源10と、複数のX線検出器23.1〜23.Nが取り付けられ、各X線検出器23.1〜23.Nを指定された位置に駆動するためのX線検出器駆動部22とを備える。また、走査型X線源10とX線検出器23.1〜23.Nとの間には検査対象20が配置される。言い換えると、X線検出器23.1〜23.Nは、検査対象20を挟むように、走査型X線源10と対向した位置にある。
【0031】
つまり、走査型X線源10は、検査対象20が配置される面の第1の側に配置され、第1の側から検査対象20に向けてX線を出力する。また、各X線検出器23.1〜23.Nは、検査対象20が配置される面の第1の側とは異なる(つまり、逆側の)第2の側に配置される。
【0032】
さらに、X線検査装置100は、X線検出器駆動部22によるX線検出器23の駆動やX線検出器23.1〜23.Nからの画像データの取得を制御するための画像取得制御機構30と、ユーザからの指示入力等を受け付けるための入力部40と、測定結果等を外部に出力するための出力部50とを備える。
【0033】
また、X線検査装置100は、走査型X線源制御機構60と、演算部70と、メモリ90とをさらに備える。このような構成において、演算部70は、メモリ90に格納されたプログラム96を実行して各部を制御し、また、所定の演算処理を実施する。
【0034】
走査型X線源10は、走査型X線源制御機構60によって制御され、検査対象20に対しX線を照射する。
【0035】
図2は、走査型X線源10の構成を示す断面図である。図2を参照して、走査型X線源10においては、電子ビーム制御部62によって制御された電子銃19から、タングステンなどのターゲット11に対し電子ビーム16が照射される。そして、電子ビーム16がターゲットに衝突した場所(X線焦点位置17)からX線18が発生し、放射(出力)される。なお、電子ビーム系は、真空容器9の中に収められている。真空容器9の内部は、真空ポンプ15によって真空に保たれており、電子銃19から高圧電源14によって加速された電子ビーム16が発射される。
【0036】
走査型X線源10においては、電子ビーム16は、電子線収束コイル13により収束された後、偏向ヨーク12によって電子ビーム16を偏向することにより、電子ビーム16がターゲット11に衝突する場所を任意に変更することができる。たとえば、偏向ヨーク12によって偏向された電子ビーム16aはターゲット11に衝突し、X線焦点位置17aからX線18aが出力される。また、同様に、偏向ヨーク12によって偏向された電子ビーム16bはターゲット11に衝突し、X線焦点位置17bからX線18bが出力される。なお、特に断らない場合は、本願発明において、走査型X線源10は透過型である。また、検査対象物の検査対象部分に応じて設定されるX線の放射の起点となるべき位置(以下、「X線の放射の起点位置」と呼ぶ)からX線を発生させるにあたり、その位置の設定の自由度を高めることができるよう、リング状ではなく、連続面のターゲットであることが望ましい。また、以下の説明では、特に位置を区別して記載しない場合は、総称として、単にX線焦点位置17と示す。
【0037】
なお、X線焦点位置を、上述したX線の放射の各起点位置に移動させるには、たとえば、X線源として固定焦点型X線源を用い、X線源自体の位置を、その都度、機械的に移動させることも可能である。ただし、図2に示すような構成であれば、X線焦点位置を、X線の放射の起点位置に移動させるにあたり、一定の範囲内であれば、X線源を機械的に移動させることを必要とせず、保守性や信頼性に優れたX線検査装置を実現できる。なお、X線源を複数個設けておき、起点位置に応じて、切り替えて使用することも可能である。本発明に係るX線源は、斜めCT撮像用のものであればよい。
【0038】
言い換えると、「X線の放射の起点位置」とは、撮像に使用するX線検出器23の空間的な位置と、検査対象20の検査対象部の空間的な位置とが特定されれば、特定されうる空間的な位置のことを意味し、X線焦点位置とは、実際にX線が出力されるターゲット上の位置を意味する。したがって、「X線の放射の起点位置」にX線焦点位置をもってくるためには、走査型X線源による電子ビームの走査によることも可能であるし、あるいは、X線源そのものを機械的に移動させてもよい。
【0039】
図1に戻って、走査型X線源制御機構60は、電子ビームの出力を制御する電子ビーム制御部62を含む。電子ビーム制御部62は、演算部70から、X線焦点位置、X線エネルギー(管電圧、管電流)の指定をうける。X線エネルギーは、検査対象の構成によって異なる。
【0040】
検査対象20は、走査型X線源10とX線検出器23(以下、「X線検出器23.1〜23.N」を総称するときは、「X線検出器23」と呼ぶ)との間に配置される。検査対象20の位置の移動にあたっては、本実施の形態では、ベルトコンベアのように一方向に移動することにより検査対象を検査のための位置に配置する。ただし、X−Y−Zステージで任意の位置に移動するようにしてもよい。
【0041】
なお、検査対象がプリント実装基板のように小さい場合、上述のように、走査型X線源10とX線検出器23とは固定で検査対象を移動させることとしてもよいものの、ガラス基板など検査対象が大面積で、検査対象側を任意に移動させることが困難な場合は、走査型X線源10とX線検出器23との相対的な位置は固定したまま、走査型X線源10およびX線検出器23を移動させてもよい。
【0042】
X線検出器23は、走査型X線源10から出力され、検査対象20を透過したX線を検出して画像化する2次元X線検出器である。たとえば、I.I.(Image Intensifier)管などである。本実施の形態では、X線検出器駆動部22に複数のX線検出器を配置することから、スペース効率のよいFPD(フラットパネルディテクタ)が望ましい。また、インライン検査で使うことができるように高感度であることが望ましく、CdTeを使った直接変換方式のFPDであることが特に望ましい。
【0043】
画像取得制御機構30は、演算部70より指定された位置にX線検出器23を移動させるようにX線検出器駆動部22を制御するための検出器駆動制御部32と、演算部70から指定されたX線検出器23の画像データ98を取得するための画像データ取得部34とを含む。画像データ取得部34は、取得した画像データ98をメモリ90に格納する。
【0044】
X線検出器駆動部22により駆動されたX線検出器23の位置は位置センサ(図示しない)によって知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0045】
また、X線検出器駆動部22は、拡大率を調整するために上下に昇降できることが望ましい。この場合、X線検出器駆動部22の上下方向の位置をセンサ(図示しない)により知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0046】
なお、本実施の形態では、X線検出器23.1〜23.Nと、X線検出器駆動部22と、画像取得制御機構30とを組み合わせて、検査対象20を透過したX線を検出している、しかし、X線の検出方法はこれに限られるわけではない。X線検査装置100は、いろいろな方向から検査対象20に入射し検査対象20を透過したX線が届く位置でX線を検出できる機構を備えていればよい。例えば、X線検査装置100は、より多くの固定されたX線検出器によりX線を検出しても構わない。また、複数のX線検出器のかわりに、単体のX線検出器を使用してもよい。
【0047】
入力部40は、ユーザの入力を受け付けるための操作入力機器である。出力部50は、演算部70で構成されたX線画像等を表示するためのディスプレイである。すなわち、ユーザは、入力部40を介して様々な入力を実行することができ、演算部70の処理によって得られる種々の演算結果が出力部50に表示される。出力部50に表示される画像は、ユーザによる目視の良否判定のために出力されてもよいし、あるいは、後で説明する良否判定部78の良否判定結果として出力されてもよい。
【0048】
演算部70は、走査型X線源制御部72と、画像取得制御部74と、再構成部76と、良否判定部78と、検査対象位置制御部80と、X線焦点位置計算部82と、撮像条件設定部84とを含む。プロセッサに相当する演算部70は、メモリ90に格納されたプログラム96を実行し、上述の各部の機能を実現するものとする。ただし、演算部70の機能の一部もしくは全部は、ハードウェア的に実現されても構わない。
【0049】
走査型X線源制御部72は、X線焦点位置、X線エネルギーを決定し、走査型X線源制御機構60に指令を送る。
【0050】
画像取得制御部74は、X線検出器駆動部22により指定位置まで駆動されるX線検出器23のうち、画像を取得するX線検出器23を決定し、画像取得制御機構30に指令を送る。また、画像取得制御機構30から、画像データを取得する。
【0051】
再構成部76は、画像取得制御部74により取得された複数の画像データから3次元データを再構成する。
【0052】
良否判定部78は、再構成部76により再構成された3次元データあるいは、透視データをもとに検査対象の良否を判定する。たとえば、半田ボールの形状を認識し、当該形状が予め定められた許容範囲内であるか否かを判定する等により良否判定を行なう。なお、良否判定を行なうアルゴリズム、あるいは、アルゴリズムへの入力情報は、検査対象によって異なるため撮像条件情報94から入手する。
【0053】
検査対象位置制御部80は、検査対象20を移動させる検査対象位置駆動機構110を制御する。
【0054】
X線焦点位置計算部82は、検査対象20のある検査エリアを検査する際に、その検査エリアに対するX線焦点位置や照射角などを計算する。
【0055】
撮像条件設定部84は、検査対象20に応じて、走査型X線源10からX線を出力する際の条件を設定する。たとえば、X線源に対する印加電圧、撮像時間等である。
【0056】
メモリ90は、X線焦点位置計算部82によって計算されたX線焦点位置が格納されるX線焦点位置情報92と、撮像条件設定部84によって設定された撮像条件や、良否判定を行なうアルゴリズムに関する情報などが格納される撮像条件情報94の他、上述した演算部70が実行する各機能を実現するためのプログラムとを含む。なお、メモリ90は、データを蓄積することができればよく、RAM(Random Access Memory)やEEPROM(Electrically Erasable and Programmable Read−Only Memory)やHDD(Hard Disc Drive)等の記憶装置により構成される。
【0057】
図3は、X線検査装置100の構成を説明するための図である。なお、図1と同一部分には、同一符号を付しており、かつ、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0058】
図3を参照して、X線検出器駆動部22は、X線検出器23.1および23.2をそれぞれ、XYθの自由度で駆動可能なXYθ動作機構となっており、X線源10としては、走査型X線源が用いられている。なお、X線検出器駆動部22は、図3に示したアーム型の駆動機構に限られるわけではない。各X線検出器23を任意の位置に移動・回転させる役割を果たすものであれば、X線検出器駆動部22として用いることできる。
【0059】
図3に示した構成では、検査対象の位置を動かすために、検査対象位置駆動機構110と、検査対象位置制御部80とが設けられている。
【0060】
また、図3においては、2つの独立に移動可能なX線検出器を使用しているが、X線検出器が2つ以上設けられていてもよい。また、固定された複数のX線検出器を用いてもよい。この場合、検査に必要な方向の各撮像データが、いずれかのX線検出器で撮像できるように、各X線検出器が配置されているものとする。ただし、以下では、2つの独立に移動可能なX線検出器を使用する例について説明する。
【0061】
X線検出器23.1とX線検出器23.2は、独立にX-Y-θ動作が可能である。なお、X線検出器23の駆動の仕方によって、θ回転の機構は必ずしも設けられていなくてもかまわない。
【0062】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、X線検出器23の移動・回転を行う。ただし、このようなX−Y方向の移動またはX−Y平面内でのθ回転を可能とする構成であり、X線検出器23の移動に対して同様の機能を持つものであれば、これ以外の機構を用いることも可能である。
【0063】
また、検査対象の視野は、演算部70内の検査対象位置制御部80に制御される検査対象位置駆動機構110により、上記X線検出器23.1または23.2とは独立にX−Y−Z動作が可能である。さらに、上述のとおり、X線源10の走査型X線源は、X線焦点位置17をX線ターゲット上の任意の位置へ高速に移動させることが可能である。
【0064】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査型X線源制御機構60に命令を送り、後に説明するような検査処理のためのフローチャートで示されるプログラムを実行する。また、入力部40からの入力によって検査装置の動作を制御し、各部の状態、または検査結果を出力部50より出力することができる。
【0065】
検査対象位置駆動機構110は、検査対象20を固定する一対のレール112と、変位計114とを備える。各レール112は、検査対象20の左端または右端を上下から挟み、基板を固定する。ここでは、左右をY軸に沿って、上下をZ軸に沿って定義している。レール112は、検査対象位置制御部80からの命令によって検査対象を水平(X−Y)および垂直(Z)方向に移動可能である。本実施の形態では、検査対象位置駆動機構110は、検査対象20を、ほぼXY平面(水平面)に平行な、つまり、法線方向が実質的にZ方向である搬送面に沿って搬送するものとする。ここで、「法線方向が実質的にZ方向である」とは、搬送面が検査に支障のない範囲で(例えば、0〜5度)水平面から傾いていてもよいことを意味する。
【0066】
変位計114は、検査対象20の反りを計測する。特に、プリント基板への部品の実装には、リフローといったような加熱処理工程が含まれるため、一般に、熱によりプリント基板が変形し、反りが生じる。通常の外観検査であれば、バックアップピンと呼ばれる支持棒により基板の反りを軽減できる。しかしながら、X線検査では、バックアップピンが画像に写りこんでしまうため、バックアップピンを使用できない。よって、複数の検査対象20を測定するにあたっては、X線検査装置100は、変位計114の測定結果に基づいて、Z方向の検査領域を補正している。
【0067】
検査対象位置駆動機構110は、検査対象20の上下面を覆わない。そのため、X線は、検査対象20を透過することができる。ただし、検査対象位置駆動機構110の構成は、上述のものに限られない。例えば、X線を透過するX−Yステージを検査対象位置駆動機構110として用いてもよい。しかしながら、多くの検査対象20を検査するためには、図示した検査対象位置駆動機構110が好適である。
【0068】
検査対象20は、平面状の物体であるものとする。また、検査対象20は、検査対象20の面が、XY平面とほぼ平行に、つまり、法線方向が実質的にZ方向である平面上に配置されているものとする。したがって、検査対象20の長軸方向は、Z方向と実質的に直交する。ここで、「長軸方向は、Z方向と実質的に直交する」とは、長軸方向とZ方向とのなす角度が、検査に支障のない範囲で90度と異なっていてもよい(例えば、85〜95度であってもよい)ことを意味する。
【0069】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。
【0070】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0071】
走査型X線源10は、走査型X線源制御機構60を通した演算部70からの命令に従って、電子線を発生させ、電子線収束コイル13および偏向ヨーク12とによってターゲット上の指定された位置に電子線を収束させ、X線焦点位置17を高速に移動させる。
【0072】
走査型X線源10は、複数の方向から検査対象20にX線が入射するように、X線を出力する。検査対象20の面へのX線の入射角度は、X線の走査範囲やX線の検出位置によって制限される角度内にある。ただし、検査対象20のX線の入射方向は、検査対象20と走査型X線源10との位置関係のため、検査対象20の長軸方向を含むことはない。
【0073】
(2.再構成手法について)
ここで、X線データ再構成についての一般的な説明をしておく。X線データ再構成は、検査対象物の外部から照射したX線が、検査対象物によってどれだけ吸収(減衰)されたかを複数の角度から計測することにより、検査対象物内部のX線吸収係数の分布を求める手法である。
【0074】
なお、以下では、X線源としては、いわゆる走査型X線源を用いて測定が行なわれるものとして説明を行なう。
【0075】
図4は、データ再構成手法を説明するための図である。図4を参照して、X線検出器Daに対応するX線焦点Faから発せられたX線は検査対象(図示していない)を透過してX線検出器Daの画素Paに到達する。X線が検査対象を透過することによって、X線量(X線強度)は検査対象を構成する部品等のそれぞれが有する固有のX線吸収係数に相当する分だけ減衰する。X線強度の減衰量は検出器画素Paの画素値として記録される。
【0076】
X線焦点Faから発せられるX線強度をIとし、X線焦点Faから検出器画素PaまでのX線が通過した経路をtとし、検査対象におけるX線吸収係数分布をf(x,y,z)
とすると、検出器画素Paに到達したX線の強度Iaは以下の式(1)で表される。
【0077】
【数1】

【0078】
この式の両辺の対数をとると、経路tに沿ったX線吸収係数分布が以下の式(2)のように線積分値により表わされる。このX線吸収係数分布をX線検出器により計測した値を投影データと呼ぶ。すなわちX線検出器はX線減衰量分布(X線強度分布と置き換えてもよい)を検出する。
【0079】
【数2】
【0080】
CTにおいて投影データから対象物の3次元データを生成するアルゴリズムは、大きく、解析的手法(解析法)および反復的手法(反復法)の2つに分類される。
【0081】
解析法は、投影画像を重ね合わせて3次元データを得るものである。解析法には、フーリエ変換法、FBP法(Filtered Back−Projection method、フィルタ補正逆投影法)などがある。
【0082】
反復法は、実際の投影画像と仮定した再構成データの投影画像とを比較し、両者が一致しない場合、再構成データを修正するという手順を何度も繰り返して、少しずつ対象物に近い再構成データを得るものである。反復法には、代数法、統計法などがある。反復法は、全ての方向の投影画像を参照して再構成データを更新する同時的反復法と1つの方向のみの投影画像を参照して再構成データを更新する逐次的反復法とに分類される。
【0083】
以下、解析法および反復法のそれぞれについて具体的に説明する。
(解析的手法の説明)
図4に示すように、解析的手法を用いるにあたっては、1つの検査対象物(あるいは
検査対象物の1つの部分)に対して、X線検出器Daの配置とは異なる位置に配置されたX線検出器Dbに対して、焦点Fbから発せられて到達したX線強度Ibについての投影データを検出する。このような投影データを、実際には、1つの検査対象物(あるいは検査対象物の1つの部分)に対して、複数の配置について検出することで、これらの投影データから検査対象物の3次元データを再構成することになる。
【0084】
図5は、図4に示した検査対象物における視野FOV、視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。再構成画素Vの部分を透過したX線は、X線検出器Da、Db上に像を結ぶにあたり、(焦点から再構成画素Vまでの距離)対(焦点からX線検出器までの距離)の比に応じて拡大された像を結ぶことになる。
【0085】
Feldkampらは、この式(2)をもとに3次元データ再構成を行なうための再構成アルゴリズムを提案した。このアルゴリズム(いわゆるFeldkamp法)は、L.A.Feldkamp,L.C.Davis and J.W.Kress,“Practical cone−beam algorithm”,Jounrnal of the Optical Society oFamerica.A, 612−619(1984)に示されているように、公知技術であるのでここでは詳細に説明しない。以下では一般的な手法の一つであるFBP法(Filtered Back−Projection法:フィルタ補正逆投影法)について簡単に説明する。
【0086】
投影データから、X線が通過した経路tに沿って投影データを加算してX線吸収係数分布f(x,y,z)を求める操作を逆投影と呼ぶ。ただし、単純に投影データを加算すると撮像系の点広がり関数によりボケが生じるため、投影データにフィルタをかける。このフィルタにはたとえばShepp−Loganフィルタ等の高周波強調フィルタが用いられる。フィルタをかける方向は、X線の透過経路の方向に対し垂直方向が望ましいとされているが、Feldkamp法では投影データの透過経路の方向が全て同一と近似しフィルタリングを行っており、検査可能な画像を再構成することができる。
【0087】
以下に、本実施形態におけるデータ再構成の手順を示す。まず、X線検出器Daの検出器画素Paの投影データpaをフィルタリングした値pa′を再構成画素Vの画素値vに加算する。さらに、X線検出器Dbの検出器画素Pbの投影データpbをフィルタリングした値pb′を再構成画素Vの画素値vに加算する。すると、v=pa′+pb′となる。この逆投影操作を全てのX線検出器もしくは一部のX線検出器に対して行なうことで、最終的な再構成画素Vの画素値vは以下の式(3)に従って表わされる。
【0088】
【数3】
【0089】
この操作を再構成領域(視野)FOV内の全ての再構成画素Vに対して行なうことにより、検査対象のX線吸収係数分布が求められて再構成データが得られる。
【0090】
図6は、このようなフィルタ補正逆投影法の処理手順を示すフローチャートである。
図6を参照して、解析的手法での処理が開始されると(ステップS5002)、まず、複数撮像した投影データのうちから処理対象となる投影データの選択が行なわれる(ステップS5004)。次に、選択された投影データにフィルタをかける処理を行なう(ステップS5006)。
【0091】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択し(ステップS5008)、再構成画素Vに対応する検出器画素を求める(ステップS5010)。
【0092】
続いて、再構成画素Vにフィルタリングした画素値を加算し(ステップS5012)、全ての再構成画素について加算を行なったかが判断される(ステップS5014)。全ての再構成画素について処理が終わっていなければ、処理はステップS5008に復帰し、終了していれば、処理は、ステップS5016に移行する。
【0093】
ステップS5016では、全ての投影データについて処理を行なったかが判断される。全ての投影データについて終了していなければ、処理はステップS5004に復帰する。一方、全ての投影データについて終了していれば、再構成データ生成が終了する(ステップS5018)。
【0094】
(反復的手法の説明)
反復的手法では、検査対象のX線吸収係数分布f(x,y,z)と投影データln(I/Ia)とを方程式と見なし再構成する。
【0095】
図7は、走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。一方、図8は、図7の概念図を上面から見た上面図である。
【0096】
以下に、図7および図8を参照して、反復的手法で再構成する手順について説明する。再構成データの画素値を一列に並べたベクトルν(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν」と記す)と、投影データを一列に並べたベクトルp(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「p」と記す)を以下の式(4)および式(5)で表現する。
【0097】
以下では、たとえば、再構成画素Vの値をある値に仮定したときにX線焦点FaからのX線がX線検出器Da上に結ばれると計算される画像についての画素を中間投影画素Qaとし、実際にX線検出器Da上で観測された画素を検出器画素Paと呼ぶ。X線検出器Dbについても、それぞれ、中間投影画素Qb、検出器画素Pbと呼ぶ。
【0098】
反復的手法では、仮定された再構成画素ベクトルνとこれに対応する中間投影データベクトルqに対して、以下に説明するように、中間投影データベクトルqが、実際に測定された検出器画素値PaまたはPbを投影データと一致するとみなせるまで、仮定されたベクトルνを更新する反復演算により解νを求める。
【0099】
【数4】
【0100】
ただし、Jは再構成領域(視野)内の画素数、Iは投影データの画素数である。また、Tは転置を示す。νとpを関係付ける投影演算を以下の式(6)のI×J係数行列で表す。
【0101】
【数5】
【0102】
この時、反復的手法でのデータ再構成は、以下の式(7)線形方程式を解いてνを求める問題として定式化できる。
【0103】
【数6】
【0104】
つまり、vjがpiに対する寄与をwijとする。なお、Wは再構成データの画素値νが投影データの画素値pに対してどの程度寄与するかを表しており、X線焦点とX線検出器の幾何学的位置から求めることができ、検出確率もしくは重みと呼ばれることもある。
【0105】
反復的手法には、方程式を代数的に解く手法や統計的な雑音を考慮した手法等が考案されているが、以下に一般的に用いられている代数的手法であるSART(Simultaneous Algebraic Reconstruction Technique)について説明する。詳細は、A.H.Anderson and A.C.Kak,“SIMULTANEOUS ALGEBRAIC RECONSTRUCTIONTECHNIQUE(SART):A SUPERIOR IMPLEMENTATION OF THE ART ALGORITHM”,ULTRASONIC IMAGING 6, 81−94(1984)に記載されている。
【0106】
SARTでは、最初に、以下の式(8)で表される初期データν0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν0」と記す)を仮定する。
【0107】
【数7】
【0108】
初期データν0は全て0のデータでもよいし、CAD(Computer Aided Design)データ等から取得したデータを仮定してもよい。
【0109】
次に、投影演算Wを用いて以下の式(9)で表される中間投影データq0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「q0」と記す)を生成する。
【0110】
【数8】
【0111】
中間投影データq0の生成は、1つの投影データに対し行ってもよいし、複数の投影データに対し行ってもよい。以下は1つの投影データに対し行ったものとして説明する。
【0112】
生成した中間投影データq0とX線検出器から取得された投影データpを比較する。比較方法は差をとる方法と除する方法があるが、SARTでは差(p−q0)をとる。
【0113】
初期データν0を更新する。更新に用いる式(反復式)は式(10)のようになる。
【0114】
【数9】
【0115】
なお、式(10)中の以下の式(11)および式(12)は、予め計算しておくことで更新の計算時間を短縮することができる。
【0116】
【数10】
【0117】
上記の計算により生成された再構成データを初期データとして代入し、同一の処理を複数回反復させることで再構成データが得られる。
【0118】
図9は、反復的手法の処理を説明するためのフローチャートである。
図9を参照して、まず、反復的手法による処理が開始されると(ステップS5102)、続いて、初期データの設定が行なわれる(ステップS5104)。上述のとおり、初期データとしては、たとえば、全てが0の値でもよい。次に、複数のX線検出器位置に対応する複数の投影データのうちから処理対象となる投影データを選択する(ステップS5106)。
【0119】
中間投影データを生成する。中間投影データの生成方法は上述したとおりである。(ステップS5108)。
【0120】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択し(ステップS5110)、再構成画素Vに対応する検出器画素を求める(ステップS5112)。
【0121】
反復式をもとに、再構成画素Vの値を更新する(ステップS5114)。
次に、全ての再構成画素について更新を行ったかが判断され(ステップS5116)、全ての再構成画素について処理が終わっていなければ、処理はステップS5110に復帰し、終了していれば、処理は、ステップS5118に移行する。
【0122】
ステップS5118では、全ての投影データについて処理を行なったかが判断される。全ての投影データについて終了していなければ、処理はステップS5106に復帰する。一方、全ての投影データについて終了していれば、処理はステップS5120に移行する。
【0123】
ステップS5120では、規定の反復回数だけ処理を行ったかが判断され、反復していなれば、処理はステップS5104に復帰して現在の再構成画素値を初期データとして採用して処理を繰り返し、処理を規定回数だけ反復していれば、再構成データ生成が終了する(ステップS5122)。
【0124】
以上のようにX線検出器により取得された投影データから、検査対象物の3次元画像を再構成できる。
【0125】
ただし、解析的手法では、フィルタリング処理をX線検出器の各画素に対して行う場合の計算の容易さ等の理由から、複数の投影データの各々を取得するために、X線検出器および焦点と対象物との相対位置を変更した場合でも、X線の焦点とX線検出器との相対的な配置は、一定の関係を維持することが望ましい。言い換えると、焦点からX線検出器を見たときには、見通される立体角内の対象物の視野に含まれる部分の角度・対象物内の位置等は変化しても、焦点とX線検出器との位置関係は、一定のままであることが望ましい。しかも、上記のような逆投影法を行なうにあたっては、アーチファクト等の低減のためには、複数の投影データは、対象物の視野に含まれる部分について、等角度ごとに取得されることが望ましい。
【0126】
これに対して、反復的手法では、このようなX線の焦点とX線検出器との相対的な配置に、このような制限はない。
【0127】
(解析法および反復法の特徴)
一般に解析法および反復法には次のような特徴がある。解析法は、精度のよい再構成データを得るために多くの枚数の投影画像を必要とするが、再構成にかかる計算時間は短い。一方、反復法は、少ない枚数の投影画像から精度のよい3次元データを再構成できるが、再構成にかかる計算時間が長い。
【0128】
さらに、PCBの検査の観点からは、解析法および反復法には次のような特徴がある。
解析法は、投影像をフィルタリングした上で逆投影するため、解析法による再構成データを切り出して得られる2次元断面画像(再構成画像とよぶ)においてはエッジが強調される。したがって、解析法は、吸収係数に差が出る検査、例えば、ボイド、異物混入検査等に適している。その反面、解析法には、斜めCT撮像が原因で、PCBの長軸(水平)方向を実質的に法線方向に持つ面に対応する再構成画像(以下、垂直断面画像とよぶ)が不鮮明となるという問題がある。これを防ぐためには、投影数を多くする必要がある(例えば32枚)。よって、解析法を用いた薄い対象物のX線CT検査には、多くの撮像時間が必要であり、結果として、時間がかかる。
【0129】
一方、反復法による再構成データを用いると、解析法と異なり撮像位置によらず高画質の再構成画像を生成できる。そのため、長軸方向からの撮像データ(垂直断面データ)の不足があっても、高画質な画像を生成できる。したがって、反復法は、垂直断面の形状が必要なぬれ検査等に適している。しかし、反復計算の計算量は大きいため、反復法を用いた薄い対象物のX線CT検査には、多くの計算時間がかかる。また、反復法には、ボイド検査に適さないという問題がある。反復計算により得られる再構成画像のエッジはぼやけるためである。
【0130】
図10を参照して、解析法および反復法の特性についてまとめておく。図10は、解析法および反復法の特性について説明するための図である。なお、図10の横軸には、投影数、すなわち、投影画像の枚数を示す。ただし、図10に示した投影数は目安であって、投影数は、これに限られるわけではない。
【0131】
図10に示す領域1では、解析法および反復法のいずれを用いても精度のよい検査が行なえる。つまり、投影数が多い場合は、解析法および反復法のいずれを用いてもよい。また、水平断面検査の1つである異物ブリッジ検査を行なう場合には、投影数によらず、解析法および反復法のいずれを用いてもよい。ただし、計算時間を考慮に入れると、領域1では、解析法を用いる方が好ましい。
【0132】
図10に示す領域2では、解析法を用いて検査を行なうことが好ましい。つまり、水平断面検査の1つであるボイド検査を行なう場合には、解析法を用いることが好ましい。これは、上述の通り、解析法によれば、エッジが強調された再構成画像が得られるためである。
【0133】
図10に示す領域3では、反復法を用いて検査を行なうことが好ましい。つまり、垂直断面検査であるぬれ検査を行なう場合には、反復法を用いることが好ましい。これは、上述の通り、投影数が少ない場合に解析法で得られる垂直断面の再構成画像は、不鮮明だからである。
【0134】
以上説明してきたように、解析法および反復法のいずれを用いて検査するのが好ましいかは、検査種類と投影数とによる。
【0135】
解析法および反復法のそれぞれで得られる再構成画像の具体例を図11に示す。図11Aは、解析法で得られる再構成画像の具体例を示す図であり、図11Bは、反復法で得られる再構成画像の具体例を示す図である。
【0136】
図11Aを参照して、再構成画像5a〜5iは、計算機による球状の物体の複数の投影画像から再構成された水平断面画像である。再構成画像5a〜5cは、それぞれ、解析法、逐次的反復法、同時的反復法によって8枚の投影画像を基に計算された。再構成画像5d〜5fは、それぞれ、解析法、逐次的反復法、同時的反復法によって16枚の投影画像を基に計算された。再構成画像5e〜5iは、それぞれ、解析法、逐次的反復法、同時的反復法によって32枚の投影画像を基に計算された。なお、図11Aには、参照のため、計算機による水平断面の投影画像4も示している。
【0137】
図11Bを参照して、再構成画像7a〜7iは、計算機による球状の物体の複数の投影画像から再構成された垂直断面画像である。再構成画像7a〜7cは、それぞれ、解析法、逐次的反復法、同時的反復法によって8枚の投影画像を基に計算された。再構成画像7d〜7fは、それぞれ、解析法、逐次的反復法、同時的反復法によって16枚の投影画像を基に計算された。再構成画像7e〜7iは、それぞれ、解析法、逐次的反復法、同時的反復法によって32枚の投影画像を基に計算された。なお、図11Bには、参照のため、計算機による水平断面の投影画像6も示している。また、再構成画像7a〜7iには、水平断面の投影画像6における物体の外周に対応する箇所を点線で示している。
【0138】
図11Aおよび図11Bを参照して、対象物を垂直方向から見た解析法による再構成画像の分解能は高いが、対象物を水平方向から見た解析法による再構成画像は間延びしていることがわかる。一方、反復法による再構成画像では、水平方向についても球状の物体が再現されている。
【0139】
以上説明してきたように、解析法あるいは反復法のいずれか一方を用いる手法では、短時間で対象物を精度よく検査することができない。特に、この手法では、水平方向の検査および垂直方向の検査を両方とも短時間で精度よく検査できない。本実施の形態に係るX線検査装置100は、以下で詳しく説明するように、解析法と反復法とを組み合わせることにより、対象物を短時間で精度よく検査することができる。
【0140】
(3.X線検査の概略)
図12を参照して、X線検査装置100によるX線検査の概略について説明する。図12は、X線検査装置100によるX線検査の概略をフローチャート形式で示した図である。
【0141】
図12を参照して、まず、処理が開始されると(ステップS1200)、演算部70の検査対象位置制御部80からの命令により、検査対象位置制御機構110は、検査対象の検査部分(視野)を撮像可能な位置に移動する(ステップS1202)。すなわち、透視画像を撮像するために、検査対象をのせたステージとX線検出器を所定の位置に移動する。各構成要素の位置の移動は予め決められていることが通常で、マグネスケール等で読み取ることができるが、レーザー変位計等を用いてもよい。また、通常、検査においては、検査位置の特定のために光学カメラ(図示せず)が搭載されているため、光学カメラの画像をもとに位置を決めることが可能である。その他の方法として、検査対象のCADデータをもとに自動的に決めてもよいし、作業者が目視で行ってもよい。
【0142】
その上で、まずは、透視画像の撮像を行なう(ステップS1204)。具体的には、X線検査装置100は、X線の照射の開始とともに、X線焦点を所定位置に移動させてX線検出器の露光を開始する。一定時間後に露光を終了し、得られた画像を検査装置制御機構へ転送する。
【0143】
演算部70の良否判定部78は、透視画像を検査して、取得した透視画像から検査対象の視野(透視画像で撮像されている範囲)の良否判定を行う(ステップS1206)。良否判定手法は、様々な手法が提案されており、公知のためここでは詳細を記述しない。例えば、もっとも基本的な検査としては、透視画像を一定の値で2値化し、CADデータ等の設計情報と比較し、透視画像上の所定の位置に部品があるかないかを面積により判断する。
【0144】
続いて、演算部70は、再構成画像による検査が必要か否かを判断する(ステップS1208)。判断の基準は、CADデータ等の設計情報をもとに予め設定しておくことができる。また、演算部70は、透視画像の良否判定結果から再構成画像による検査が必要か否かを判断することも可能である。例えば、実装基板の検査において、片面にのみ部品が実装されている場合、透視画像で良否判定することが可能なため再構成画像による良否判定を行なう必要がない場合もある。
【0145】
演算部70は、再構成画像による検査が必要ない場合には、検査を終了させる(S1218)。
【0146】
一方、演算部70は、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行わせる(S1210)。ここで、「視野」とは、再構成してモニタに映る範囲のことである。X線検査装置100は、ステップS1204における透視画像撮像範囲と同様の領域およびデータ再構成にあたり必要となる他の領域を視野として設定する。CT撮像においては、検査対象内の視野を複数の方向から撮像する。
【0147】
なお、複数方向からの撮像は、走査型X線源10の焦点位置の移動により実現するのが好ましい。なぜならば、焦点の移動時間は、X線検出器23やステージを機械的に移動するのにかかる時間よりも100分の1程度短いためである。
【0148】
次に、演算部70の再構成部76は、複数方向の撮像画像から解析法による再構成データおよび反復法による再構成データを生成する(ステップS1212)。さらに、ステップS1212において、再構成部76は、解析法による再構成データを用いて水平断面画像を生成する。再構成部76は、反復法による再構成データを用いて垂直断面画像を生成する。ステップS1212で再構成部76が行なう処理の詳細については、後述する。
【0149】
ここで、垂直断面画像は、対象物の長軸方向を実質的に法線方向とする垂直断面に対応する再構成画像である。ここで、「長軸方向を実質的に法線方向とする」とは、得られる垂直断面画像を垂直断面検査に用いることができる範囲で、垂直断面の法線方向が長軸方向と一致していなくてもよいことを意味する。
【0150】
また、水平断面画像は、対象物の長軸方向と実質的に直交する方向を法線方向とし、検査対象20の面にほぼ平行な水平断面に対応する再構成画像である。ここで、「長軸方向と実質的に直交する方向を法線方向とし」ならびに「検査対象20の面にほぼ平行な」とは、得られる水平断面画像を水平断面検査に用いることができる範囲で、水平断面の法線方向が長軸方向と一致していなくてもよいことを意味する。
【0151】
したがって、本実施の形態に係るX線検査装置100によれば、対象物を精度よく短時間で検査できる。反復法あるいは解析法の一方を用いる場合に比べ、少ない枚数の撮像データに基づいて、垂直方向検査および水平方向検査のそれぞれに適した再構成画像を得られる。
【0152】
続けて、演算部70の良否判定部78は、再構成画像(垂直断面画像および水平断面画像)による対象物の良否判定を行う(ステップS1214)。良否判定手法は周知であるため検査項目に適した良否判定手法を用いればよく、ここでは詳細の説明は繰り返さない。例えば、良否判定部78は、2値化画像内の半田面積に基づいて、実装基板の良否を判定する。
【0153】
さらに、演算部70は、全視野の検査を終了したか否かを判断し(ステップS1216)、終了していない場合は、検査対象位置制御機構を制御し、検査対象の検査部分(視野)を変更する(ステップS1220)。そのあと、演算部70は、処理を、ステップS1204に復帰させる。一方で、演算部70は、全視野について検査が終了していれば、本検査を終了させる(ステップS1218)。インライン検査では、検査すべき範囲(複数の視野の集まり)が決まっているため、演算部70は、全視野の検査が終了したかどうかを容易に判断できる。もしくは、作業者が、全視野の検査が終了したか判断し、X線検査装置100に指示を与えてもよい。
【0154】
なお、図12中では、透視画像と再構成画像で検査を行っているが、透視画像による検査を行なわずに、再構成画像による検査のみを行うことも可能である。ただし、通常、再構成処理は比較的時間がかかるため、再構成画像による検査の前に、透視画像で良否判定をすることで全体の検査時間を短くすることができる。
【0155】
(4.第1の実施の形態に係るデータ再構成処理)
第1の実施の形態に係るX線検査装置100の再構成部76は、上述のステップS1212(データ再構成処理)において、解析法による再構成の計算と反復法による再構成の計算とを並列に行なう。並列に2つの計算を行なうため、2つの計算を直列に行なう場合に比べ、検査時間を短縮できる。計算を並列して行なうことで計算の待ち時間がなくなる、つまり、一方の計算終了を待って他方の計算を始める必要がないからである。
【0156】
再構成部76は、解析法の計算と反復法の計算とを並列して実行できる必要がある。例えば、複数の計算機を再構成部76として用いればよい。ただし、近年では、複数のCPUを搭載した計算機が普及してきている。このような計算機1台を、再構成部76として用いてもよい。
【0157】
図13を参照して、第1の実施の形態に係る再構成部76の処理について説明する。図13は、第1の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【0158】
図13に示すように、再構成部76は、解析法による再構成処理(ステップS1301〜ステップS1313)と、反復法による再構成処理(ステップS1315〜ステップS1329)とを、並行して行なう。
【0159】
まず、解析法による再構成処理について説明する。
ステップS1301において、再構成部76は、再構成に用いる投影データ(あるいは投影データの組)を一つ選択する。通常は、再構成部76は、投影データに予めつけられた番号に基づいて、投影データを順番に選択する。再構成部76は、選択する番号をインクリメントすることで、投影データを順番に選択する。
【0160】
ステップS1303において、再構成部76は、選択した投影データに高周波強調フィルタによるフィルタリング処理を施す。
【0161】
ステップS1305において、再構成部76は、逆投影する再構成画素を一つ選択する。通常、再構成部76は、再構成画素に予めつけられた番号に基づいて、再構成画素を順番に選択する。再構成部76は、選択する番号をインクリメントすることで、再構成画素を順番に選択する。
【0162】
ステップS1307において、再構成部76は、選択した再構成画素に逆投影される検出器画素を計算する。つまり、再構成部76は、再構成画素を通るX線が検出器のどのセンサ画素に入射したかを計算する。X線の経路は、X線焦点位置、再構成画素位置から幾何学的に計算でき、検出器の位置は既知である。したがって、再構成部76は、検出器のどの画素にX線が入射したかが計算できる。
【0163】
ステップS1309において、再構成部76は、ステップS1307で計算した再構成画素に対応するセンサ画素の画素値を、再構成画素の画素値に加算する。この時、加算される値は、ステップS1303のフィルタリング後の値である。
【0164】
なお、サンプリングの問題からX線が入射する画素が複数にまたがることがある。その際は、検出器画素の周囲4点の線形補間等を用いればよい。容易に想像がつくように、補間精度と計算時間とは、トレードオフの関係にある。
【0165】
ステップS1311において、再構成部76は、全ての再構成画素に対してステップS1305からステップS1309までの処理を行なったかどうかを判断する。再構成部76は、例えば、全ての再構成画素について処理を行なったどうかを、逆投影した再構成画素数をインクリメントしておき、予め定めておいた総再構成画素数を超えたか超えないかにより判断する。
【0166】
全ての再構成画素について処理が終わっていなければ(ステップS1311においてNo)、処理はステップS1305に復帰し、終了していれば(ステップS1311においてYes)、処理は、ステップS1313に移行する。
【0167】
ステップS1313において、再構成部76は、全ての投影データについて、ステップS1301からステップS1311までの処理を行なったどうかを判断する。再構成部76は、例えば、全ての投影データについて行なったかどうかを、選択した投影データ数をインクリメントしておき、撮像した総投影データ数を超えたか超えないかにより判断する。
【0168】
全ての投影データについて処理が終わっていなければ(ステップS1313においてNo)、処理はステップS1301に復帰し、終了していれば(ステップS1313においてYes)、再構成部76は、解析法によるデータ再構成処理を終了する。
【0169】
ステップS1314において、再構成部76は、解析法による再構成データの垂直断面を切り出して、垂直断面画像を生成する。
【0170】
続いて、反復法による再構成処理について説明する。
ステップS1315において、再構成部76は、再構成に用いる初期データを設定する。1回目の反復処理における初期データは全て0のデータでもよいし、CADデータ等から取得したデータを仮定してもよい。
【0171】
2回目以降の反復処理における初期データについては、再構成部76は、直前の再構成データを初期データに設定する。つまり、2回目の反復処理の初期データは、1回目の反復処理で得られた再構成データとなり、n回目の反復処理の初期データは、(n−1)回目の反復処理で得られた再構成データとなる。
【0172】
ステップS1317において、再構成部76は、再構成に用いる投影データ(あるいは投影データの組)を一つ選択する。通常は、再構成部76は、投影データに予めつけられた番号に基づいて、投影データを順番に選択する。再構成部76は、選択する番号をインクリメントすることで、投影データを順番に選択する。
【0173】
ステップS1319において、再構成部76は、投影演算Wを用いて中間投影データを生成する。再構成部76は、中間投影データを、1つの投影データに対して生成してもよいし、複数の投影データに対して生成してもよい。以下では、再構成部76が1つの投影データに対して中間投影データを生成したものとして説明する。
【0174】
ステップS1321において、再構成部76は、逆投影する再構成画素を一つ選択する。通常は、再構成部76は、再構成画素に予めつけられた番号に基づいて、再構成画素を順番に選択する。再構成部76は、選択する番号をインクリメントすることで、再構成画素を順番に選択する。
【0175】
ステップS1323において、再構成部76は、初期データを更新する。更新に用いる式(反復式)としては、式(10)を用いるものとする。
【0176】
ステップS1325において、再構成部76は、全ての再構成画素に対してステップS721およびステップS723の処理を行なったかどうかを判断する。再構成部76は、例えば、全ての再構成画素について処理を行なったどうかを、逆投影した再構成画素数をインクリメントしておき、予め定めておいた総再構成画素数を超えたか超えないかにより判断する。
【0177】
全ての再構成画素について処理が終わっていなければ(ステップS1325においてNo)、処理はステップS1321に復帰し、終了していれば(ステップS1325においてYes)、処理は、ステップS1327に移行する。
【0178】
ステップS1327において、再構成部76は、全ての投影データについて、ステップS1315からステップS1325までの処理を行なったどうかを判断する。再構成部76は、例えば、全ての投影データについて行なったかどうかを、選択した投影データ数をインクリメントしておき、撮像した総投影データ数を超えたか超えないかにより判断する。
【0179】
全ての投影データについて処理が終わっていなければ(ステップS1327においてNo)、処理はステップS1317に復帰し、終了していれば(ステップS1327においてYes)、処理は、ステップS1329に移行する。
【0180】
ステップS1329において、再構成部76は、規定の反復回数を行なったどうかを判断する。再構成部76は、例えば、規定の反復回数を行ったかどうかを、反復回数をインクリメントしておき、規定の反復回数(例えば、10回)を超えたか超えないかにより判断する。規定の反復回数を満たしていない場合(ステップS1329においてNo)、処理はステップS1315に復帰する。つまり、再構成部76は、上記の計算により生成された再構成データを初期データとして同一の処理を複数回反復することで再構成データを得る。規定の反復回数を満たしている場合(ステップS1329においてYes)、再構成部76は、反復法によるデータ再構成処理を終了する。
【0181】
ステップS1330において、再構成部76は、反復法による再構成データの垂直断面を切り出し垂直断面画像を生成する。
【0182】
以上のように、本実施の形態に係るX線検査装置100によれば、解析法による再構成画像および反復法による再構成画像が得られる。解析法による再構成画像を用いてボイド検査などの水平断面の検査を行ない、反復法による再構成画像を用いて濡れ検査などの垂直断面の検査を行なえばよいので、X線検査装置100が、検査にあたって準備すべき投影データの数は、解析法および反復法の一方で再構成画像を計算する場合に比べて、少なくてよい。したがって、本実施の形態に係るX線検査装置100によれば、検査時間を短縮することができる。また、X線検査装置100は、解析法の計算と反復法の計算とを並列に行なっているため、検査時間をさらに短縮することができる。
【0183】
第1の実施の形態に係るX線検査装置100によるCT撮像時間を除く検査時間を見積もる。ただし、解析法による再構成時間をTa、反復法による反復1回の再構成時間をTi、反復回数をn回、水平断面検査時間をTh、垂直断面検査時間をTvとする。
【0184】
第1の実施の形態におけるCT撮像時間を除く検査時間は、解析法の検査時間Ta+Thと、反復法の検査時間Ti*n+Tvの長い方に依存する。通常、反復法における反復1回の再構成時間は、Ti>2Taであり、Th≒Tvであるから、反復法の検査時間の方が長い。よって、第1の実施の形態のCT撮像時間を除く検査時間は、Ti*n+Tvとなる。
【0185】
また、図12には、CT撮像後にデータ再構成を行なう流れを示したが、X線検査装置100は、CT撮像と並行してデータ再構成を行なうことが好ましい。CT撮像と並行してデータ再構成すると、データ再構成時間をCT撮像時間で隠蔽することができるため、高速な検査が可能になる。
【0186】
反復法に必要な枚数の投影画像を撮像した時点で反復法の計算を開始することで、第1の実施の形態に係るX線検査装置100は、CT撮像時間も含めた全検査時間をさらに短縮することができる。
【0187】
[第2の実施の形態]
第2の実施の形態に係るX線検査装置100は、解析法による再構成を行なった後、初期データとして解析法の再構成データを使用した反復法による再構成を行なう。第1の実施の形態と異なり、X線検査装置100は、直列処理を行なう、すなわち、解析法の計算と反復法の計算とを順次行なう。しかし、反復法の初期データとして解析法の再構成データを用いるため、精度の高い画像を得るために必要な反復回数を減らすことができるため、全体としては、検査時間を短縮できる。また、再構成部76として計算を並列実行できる計算機を用いる必要がなく、本実施の形態に係る検査方法は、計算機が1台の場合にも実行することができる。
【0188】
第2の実施の形態に係るX線検査装置100の構成は、図1〜図3を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。また、X線検査の大まかな流れは、図12を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。
【0189】
第2の実施の形態に係るX線検査装置100は、第1の実施の形態とは異なるデータ再構成処理を行なう。第2の実施の形態に係るX線検査装置100の再構成部76の処理について、図14を参照して説明する。図14は、第2の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。第2の実施の形態に係る再構成部76の処理は、大きくは、次の(1)〜(3)に分けられる。
【0190】
(1)再構成部76は、まず、解析法により再構成を行なう。すなわち、再構成部76は、ステップS1401〜ステップS1413までの各処理を行ない、解析法による再構成データを生成する。ステップS1401〜ステップS1413における処理は、それぞれ、ステップS701〜ステップS713における処理と同様であるため、ここでは、説明を繰り返さない。
【0191】
(2)再構成部76は、ステップS1415において、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する。2回目以降の反復処理における初期データについては、再構成部76は、直前の再構成データを初期再構成データに設定する。つまり、2回目の反復処理の初期データは、1回目の反復処理で得られた再構成データとなり、n回目の反復処理の初期データは、(n−1)回目の反復処理で得られた再構成データとなる。
【0192】
(3)再構成部76は、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する点を除いては、第1の実施の形態と同様に、反復法の処理(ステップS1415〜ステップS1429)を実行する。ステップS1415〜ステップS1429における処理は、それぞれ、ステップS715〜ステップS729における処理と同様であるため、ここでは、説明を繰り返さない。
【0193】
第1の実施の形態に係るX線検査装置100によるCT撮像時間を除く検査時間を見積もる。ただし、解析法による再構成時間をTa、反復法による反復1回の再構成時間をTi、反復回数をn/2回、反復回数を水平断面検査時間をTh、垂直断面検査時間をTvとする。解析法による再構成データを反復法の初期データに設定しており、第1の実施の形態に比べ反復回数は少なくてよいことを鑑み、反復回数を第1の実施の形態の半分としている。
【0194】
第2の実施の形態におけるCT撮像時間を除く検査時間は、解析法の検査時間Ta+Thと、反復法の検査時間Ti*n/2+Tvを足したものとなる。よって、第2の実施の形態における検査時間は、Ta+Th+Ti*n/2+Tvとなる。
【0195】
第2の実施の形態のCT撮像時間を除く検査時間を、第1の実施の形態のCT撮像時間を除く検査時間と比較する。
【0196】
(第1の実施の形態の検査時間)−(第2の実施の形態の検査時間)=(Ti*n+Tv)−(Ta+Th+Ti*n/2+Tv)=Ti*n/2−Ta−Thである。
【0197】
ここで、一般に、通常、反復法における反復1回の再構成時間は、Ti>2Taである。さらに、再構成時間と検査時間について考えると、一般的にTa>>Thである。したがって、(第1の実施の形態の検査時間)−(第2の実施の形態の検査時間)>0、すなわち、(第2の実施の形態の検査時間)<(第1の実施の形態の検査時間)となる。
【0198】
[第3の実施の形態]
第3の実施の形態に係るX線検査装置100は、解析法による再構成を行なった後、解析法の結果に基づいて反復法で再構成する範囲を設定し、設定された範囲について反復法による再構成を行なう。解析法の計算と反復法の計算とを直列に行なう点は、第2の実施の形態と同様であるが、解析法の結果に基づいて反復法で再構成する範囲を狭めることで、反復1回の再構成時間を短縮でき、反復法の再構成時間を短縮することができる。また、再構成部76として計算を並列実行できる計算機を用いる必要がなく、本実施の形態に係る検査方法は、計算機が1台の場合にも実行することができる。
【0199】
第3の実施の形態に係るX線検査装置100の構成は、図1〜図3を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。また、X線検査の大まかな流れは、図12を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。
【0200】
第3の実施の形態に係るX線検査装置100は、第1の実施の形態および第2の実施の形態とは異なるデータ再構成処理を行なう。第3の実施の形態に係るX線検査装置100の再構成部76の処理について、図15を参照して説明する。図15は、第3の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。第3の実施の形態に係る再構成部76の処理は、大きくは、次の(1)〜(4)に分けられる。
【0201】
(1)再構成部76は、まず、解析法により再構成を行なう。すなわち、再構成部76は、ステップS1501〜ステップS1513までの各処理を行ない、解析法による再構成データを生成する。ステップS1501〜ステップS1513における処理は、それぞれ、ステップS701〜ステップS713における処理と同様であるため、ここでは、説明を繰り返さない。ステップS1514において、再構成部76は、解析法による再構成データから、水平断面画像を作成する。
【0202】
(2)次に、再構成部76は、ステップS1515において、水平断面画像に基づいて水平断面検査を行ない、反復法で再構成が必要な範囲を限定する。水平断面検査方法については、公知の方法を用いることができるため、ここでは、詳細な説明は行なわない。
【0203】
再構成部76は、次のような場合に、反復法による再構成が必要な範囲を限定する。
(a) ある範囲に部品がない場合
部品がない範囲は検査に必要としないため、再構成する必要がない。よって、水平断面画像に基づき、反復法を行なう前に部品があるかないかを判断することで、反復法の範囲を限定することができる。
【0204】
(b) 水平断面検査の結果、不良品であった場合
水平断面検査で不良品と判定した場合、もう一度垂直方向検査しなくても不良品と判定できる。
【0205】
(3)再構成部76は、ステップS1517において、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する。2回目以降の反復処理における初期データについては、再構成部76は、直前の再構成データを初期データに設定する。つまり、2回目の反復処理の初期データは、1回目の反復処理で得られた再構成データとなり、n回目の反復処理の初期データは、(n−1)回目の反復処理で得られた再構成データとなる。
【0206】
初期データに解析法の再構成データを用いるため、第2の実施の形態と同様、反復法の反復回数を削減することができる。
【0207】
以上では、解析法の再構成データを初期データとして用いる例について説明したが、第1の実施の形態と同様、予め定められた画像を初期データとすることもできる。この場合も、反復1回にかかる時間を短縮できるので、検査時間を短縮できる。ただし、以上の例のように、解析法の再構成データを初期データとして用いる方が、より検査時間を短縮できるのはもちろんである。
【0208】
(4)再構成部76は、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する点を除いては、第1の実施の形態と同様に、反復法の処理(ステップS1517〜ステップS1531)を実行する。ステップS1517〜ステップS1531における処理は、それぞれ、ステップS715〜ステップS729における処理と同様であるため、ここでは、説明を繰り返さない。ステップS1532において、再構成部76は、反復法による再構成データから垂直断面画像を作成する。
【0209】
第3の実施の形態に係るX線検査装置100によるCT撮像時間を除く検査時間を見積もる。ただし、解析法による再構成時間をTa、反復法による反復1回の再構成時間をTi、反復回数をn/2回、水平断面検査時間をTh、垂直断面検査時間をTv、反復法の再構成範囲の限定にかかる時間をTlとする。解析法による再構成データを反復法の初期画像に設定しており、第1の実施の形態に比べ反復回数は少なくてよいことを鑑み、反復回数を第1の実施の形態の半分としている。また、反復法による再構成範囲が半分に限定されたと仮定している。実装基板の半分以上の空間は再構成する必要がない空気もしくはプリント基板であり、この仮定は妥当である。
【0210】
第3の実施の形態のCT撮像時間を除く検査時間は、解析法の検査時間Ta+Thと、反復法の再構成範囲の限定にかかる時間Tlと、反復法の検査時間Ti/2*n/2+Tvを足したものとなる。よって、第3の実施の形態のCT撮像時間を除く検査時間は、Ta+Th+Tl+Ti/2*n/2+Tvとなる。
【0211】
第3の実施の形態のCT撮像時間を除く検査時間を、第2の実施の形態のCT撮像時間を除く検査時間と比較する。
【0212】
(第2の実施の形態の検査時間)−(第3の実施の形態の検査時間)=(Ta+Th+Ti*n/2+Tv)−(Ta+Th+Tl+Ti/2*n/2+Tv)=Ti*n/4−Tlである。
【0213】
ここで、再構成時間と検査時間について考えると、一般的にTi>Ta>>Th≒Tv≒Tlであるから、(第3の実施の形態の検査時間)<(第2の実施の形態の検査時間)となる。
【0214】
[第4の実施の形態]
第3の実施の形態で、解析法の再構成結果から反復法の再構成領域を限定することについて述べた。ここでは、特に、第3の実施の形態の変形例として、再構成領域の高さ方向を限定する実施の形態について説明する。
【0215】
第4の実施の形態に係るX線検査装置100の構成は、第3の実施の形態のものと同様であり、ここではその説明を繰り返さない。また、X線検査の大まかな流れは、図12を参照して説明したものと同様であり、ここではその説明を繰り返さない。
【0216】
X線検査装置100は、図3を用いて説明したように、基板の反りを計測し、高さ補正を行なうために、変位計114を備えている。ここで、基板の反りについて、図16を参照して詳しく説明しておく。図16は、部品(BGA)が実装されたプリント基板を搬送方向から見た断面図である。
【0217】
図16を参照して、プリント基板は、反っている。この反りの大きさは、プリント基板によって異なる。X線検査装置100は、複数のプリント基板に対して検査を行なうにあたっては、各検査前に変位計114を用いて基板の反り量を求め、求めた反り量に基づいて、検査したい部品の周辺に再構成範囲を限定することで、再構成時間を短縮できる。しかしながら、変位計114は、一般的に約100umの繰り返し精度しか有さない。よって、X線検査装置100は、この誤差を考慮して再構成範囲を限定する必要がある。
【0218】
一方、再構成データの1つの画素(ボクセル)サイズは数〜数十umである。そのため、繰り返し精度の誤差を考慮して、再構成範囲を設定すると、大幅に計算量が増える。例えば、バンプ直径が300umのBGAを検査することを考える。この場合、変位計114の繰り返し精度のため、余分に100×2=200um分の高さの再構成データを作成しなくてはならない。そのため、繰り返し誤差がない場合に比べ、(300+100×2)/300=1.7倍の計算時間が必要となる。
【0219】
そこで、本実施の形態に係るX線検査装置100は、高さ(Z)方向に直交する(つまり、XY平面に平行な)複数の断層における画素分布を求め、画素分布に基づいて、高さ方向に再構成範囲を限定する。
【0220】
図17は、本実施の形態における、解析法の視野(データの再構成範囲)と、反復法の視野との関係を示す図である。図17を参照して、解析法の視野は、基板の反りがあっても、検査対象(ここでは基板1601、部品1603、BGA1604)が視野に含まれる程度に、検査対象の高さ方向のサイズに比べて大きく設定される。一方、反復法の視野は、検査対象のBGA1604を含む必要最小限の領域に設定される。
【0221】
解析法による再構成3次元データの断層画像の一例を図18に示す。図18に示すように、解析法による再構成画像は、斜めCT撮像の影響により、高さ方向にのびたものになる。しかしながら、解析法による再構成データから半田ボールの存在する位置を推測することは可能である。
【0222】
本実施の形態では、X線検査装置100の再構成部76は、解析法による再構成データに基づいて、次のように半田ボールの存在する位置を推測し、反復法で再構成を行なう領域を設定する。
【0223】
まず、再構成部76は、解析法による再構成データの複数の水平断面画像について、画素値の分散Vzを求める。つまり、再構成部76は、各水平断面画像内の全ての画素値の平均を求め、平均と画素値の差の2乗の和を求める。
【0224】
次に、再構成部76は、分散Vzが最大となる位置Zmidを算出する。再構成部76は、求めた分散Vzを全て比較し、最も大きな値を選択する。そして、再構成部76は、最も大きな分散Vzを持つ画像の高さをZmidとする。
【0225】
分散Vzが最大となる位置(Zmid)は、部品の中心付近と考えられる。検査対象である基板においては、部品はX線が吸収される上、同一の高さに密集しているという特徴がある。その特徴から、部品の存在する高さの水平断層画像では輝度値のばらつきが大きくなり、分散が大きくなると考えられるためである。そこで、再構成部76は、Zmidを起点として、部品の上端位置と下端位置とを探し、視野の高さ範囲を求める。
【0226】
再構成部76は、Zmidより低いZ位置で、分散Vzが閾値Vthよりも小さい位置Zlowを算出する。再構成部76は、ZmidからZが小さくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZlowとする。ここで、Vthは、ユーザが予め設定しておくものとする。
【0227】
同様に、再構成部76は、Zmidより高いZ位置で、分散Vzが閾値Vthよりも小さい位置Zhighを算出する。再構成部76は、ZmidからZが大きくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZhighとする。
【0228】
そして、再構成部76は、反復法で再構成を行なう領域(視野)の高さ範囲をZlowからZhighに設定する。
【0229】
この設定方法について、図19を参照して説明する。図19は、図18に示した解析法による再構成データの断層画像の画素値の分散を示す図である。横軸は、断層画像のZ位置を示す。縦軸は、分散Vzを示す。
【0230】
図19を参照して、分散Vzは、半田ボールに対応するピークを持つ。再構成部76は、この位置を、Zmidとして求める。また、分散Vzは、Zmidが遠ざかるにつれ、次第に減少する。ここでは、Vthを2000に設定している。再構成部76は、Vz=2000となるZを、Zhigh、Zlowとして求める。
【0231】
このように求めたZmid、Zhigh、Zlowを図18にも示している。この図では、物体は、Zhigh、Zlowを超えて存在するように見える。しかし、斜めCT撮像では、物体が高さ方向に間延びするため、再構成する視野は求めた高さ範囲で十分である。
【0232】
第4の実施の形態に係るX線検査装置100の再構成部76の処理について、図20を参照して説明する。図20は、第4の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【0233】
ステップS2001において、再構成部76は、解析法による3Dデータの再構成および水平断面画像の作成を実施する。具体的には、再構成部76は、図15に示したステップS1501からステップS1514までの処理を実行する。これらの処理については、すでに説明しているので、その詳細は繰り返さない。
【0234】
ステップS2003において、再構成部76は、1つの高さ位置(Z位置)について水平断面画像における画素値の分散Vzを求める。
【0235】
ステップS2005において、再構成部76は、全てのZ位置について分散Vzを求めたかどうか判断する。
【0236】
すべてのZ位置について分散Vzを求めていないと判断した場合(ステップS2005においてNO)、再構成部76は、Z位置を変えて、ステップS2003の処理を再度行なう。
【0237】
すべてのZ位置について分散Vzを求めたと判断した場合(ステップS2005においてYES)、再構成部76は、ステップS2007において、分散Vzが最大となる位置Zmidを算出する。
【0238】
ステップS2009において、再構成部76は、ZmidからZが小さくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZlowとして求める。
【0239】
ステップS2011において、再構成部76は、ZmidからZが大きくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZhighとする。
【0240】
ステップS2013において、再構成部76は、反復法の視野の範囲をZlowからZhighに設定する。
【0241】
ステップS2015において、再構成部76は、反復法による3Dデータの再構成および垂直断面画像の作成を行なう。具体的には、再構成部76は、図15に示したステップS1517からステップS1532までの処理を実行する。これらの処理については、すでに説明しているので、その詳細は繰り返さない。
【0242】
以上の処理により、本実施の形態に係るX線検査装置100によれば、反復法の視野を高さ方向について必要最低限に設定することができる。したがって、反復法の再構成時間を短縮できる。例えば、バンプ直径が300umのBGAの検査の場合、反復法の計算時間を1.7倍高速化できる。
【0243】
上では、分散が最大となる高さをはんだボール中心の高さと仮定したが、Zmidを求める方法としては他にも下記の方法が考えられる。
【0244】
(1) はんだボールの直径
再構成部76は、断面画像において、はんだボールに対応するはんだ領域(2値化したときの、白または値が1の領域)の直径が最大となる高さを、Zmidとしてもよい。これは、はんだボールが球形をしており、中心付近の直径が最大となる性質を利用したものである。
【0245】
(2) はんだボールの面積
再構成部76は、はんだ領域の面積が最大となる高さを、Zmidとしてもよい。この設定方法は、はんだボールの直径をZmidに設定する方法と同様の考え方に基づいている。しかしながら、この方法では、はんだボールの断層が正円でないことによる誤認識を回避することができる。また、この方法には、面積は長さの2乗になるため、長さで比較するよりもノイズの影響を受けにくいという利点がある。
【0246】
また、上では、分散に閾値を設けて視野高さを決めるZlowおよびZhighを算出していたが、ZlowおよびZhighを決定する方法としては、他にも下記の方法が考えられる。
【0247】
(1) 既定の高さ範囲の利用
ボールのサイズが予め分かっていれば、実装されたはんだがどの程度の厚みになるかは容易に予想がつく。そこで、再構成部76は、はんだボールの中心の高さを求めたら、中心の高さから予め設定しておいた一定の高さの範囲にある領域を、反復法の視野として設定してもよい。この方法によれば、基板の反りにより、基板の高さが変わったとしても、基板の高さに追従して、一定の高さの視野のデータを反復法で再構成できる。
【0248】
(2) 最大値からの割合を利用
再構成部76は、はんだボール中心を求めるのに利用した値(分散、面積等)の最大値に所定の割合をかけた値を閾値とすることも可能である。例えば、再構成部76は、ボール中心の高さの分散の20%の分散を示す位置をZlow、Zhighにするように設定する。この方法によれば、X線検査装置100は、ノイズによる分散の変化があっても、基板高さを正確に求めることができる。
【0249】
[その他]
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0250】
【図1】本発明に係るX線検査装置100の概略ブロック図である。
【図2】走査型X線源10の構成を示す断面図である。
【図3】第1の実施の形態のX線検査装置100の構成を説明するための図である。
【図4】データ再構成手法を説明するための図である。
【図5】図4に示した検査対象物における視野FOV、視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。
【図6】フィルタ補正逆投影法の処理手順を示すフローチャートである。
【図7】走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。
【図8】図7の概念図を上面から見た上面図である。
【図9】反復的手法の処理を説明するためのフローチャートである。
【図10】解析法および反復法の特性について説明するための図である。
【図11】解析法および反復法のそれぞれで得られる再構成画像の具体例を示す図である。
【図12】X線検査装置100によるX線検査の概略をフローチャート形式で示した図である。
【図13】第1の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図14】第2の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図15】第3の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図16】部品(BGA)が実装されたプリント基板を搬送方向から見た断面図である。
【図17】第4の実施の形態における、解析法の視野(データの再構成範囲)と、反復法の視野との関係を示す図である。
【図18】解析法による再構成3次元データの断層画像の一例を示す図である。
【図19】解析法による再構成データの断層画像の画素値の分散を示す図である。
【図20】第4の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図21】PCBの検査について説明するための図である。
【図22】特許文献1に記載の検査装置を模式的に示す図である。
【図23】X線源およびX線検出器を移動させてプリント基板を検査する検査装置の模式図である。
【符号の説明】
【0251】
10 走査型X線源、11 ターゲット、12 偏向ヨーク、13 電子線収束コイル、14 高圧電源、15 真空ポンプ、16,16a,16b 電子ビーム、17,17a,17b X線焦点位置、18,18a,18b X線、19 電子銃、20 検査対象、21 軸、22 X線検出器駆動部、22.1、ロボットアーム、22.2 検出器支持部、23 X線検出器、30 画像取得制御機構、32 検出器駆動制御部、34 画像データ取得部、40 入力部、50 出力部、60 X線源制御機構、62 電子ビーム制御部、70 演算部、72 X線源制御部、74 画像取得制御部、76 再構成部、78 良否判定部、80 検査対象位置制御部、82 X線焦点位置計算部、84 撮像条件設定部、90 メモリ、92 X線焦点位置情報、94 撮像条件情報、96 プログラム、98 画像データ、100 X線検査装置、110 検査対象位置駆動機構、1601 基板、1602 第1の部品、1603 第2の部品、1604 BGA、1605 表面層、1606 加熱後の状態、1607 ボイド、1608 ブリッジ。
【技術分野】
【0001】
本発明は、X線検査装置およびX線検査方法に関する。特に、X線照射を用いて対象物を検査するための再構成画像の生成方法であって、X線検査方法、X線検査装置に適用しうる技術に関する。
【背景技術】
【0002】
現在、様々な分野の検査において、X線CT(Computed Tomography)が用いられている。CTは、撮像された対象物の2次元データ(投影画像)から対象物の3次元のデータを生成(再構成)する技術である。CTを用いた検査では、対象物の立体的な形状、対象物をいろいろな角度から見た画像など、2次元データからは得られない情報が得られる。
【0003】
近年では、X線CTは、プリント基板(PCB;Printed Circuit Board)の検査に用いられている。PCBの検査について、図21を参照して説明する。図21は、PCBの検査について説明するための図である。
【0004】
図21Aは、電子部品が実装された基板の斜視図である。基板1601上に、第1の部品1602と、第2の部品1603とが実装されている。第2の部品1603は、BGA(Ball Grid Array)1604等により、基板1601に物理的および電気的に接続されている。
【0005】
図21Bは、基板1601と第2の部品1603との接続箇所を基板1601の面に垂直な断面で切った断面図である。BGA1604は、第2の部品1603と基板1601の表面層1605とを接続する。BGA1604は、加熱され、加熱後の状態1606に変形する。ただし、加熱後の状態1606にボイド1607が生じる場合がある。また、複数の半田ボールが結合しブリッジ1608を形成する場合もある。
【0006】
PCBの検査では、加熱後の状態1606のぬれ性、ボイド1607およびブリッジ1608の有無、異物の有無などを検査する。半田接合面の検査には、公知技術として、各種装置に搭載されている技術を用いることができる。ここでは、断層内の半田面積で判定する一般的な方法を示す。
【0007】
検査装置は、3次元データを生成し、3次元データを切り出して断層画像を作成する。検査装置は、作成した断層画像を2値化し、画像を半田とそれ以外に分離した2値化画像を取得する。この2値化処理には、判別分析法等の一般的な2値化処理を用いることが可能である。検査装置は、2値化画像から白(もしくは1)の部分のラベリングを行ない、半田を区別したラベリング画像を取得する。このラベリング処理には、ラスタスキャンによって連結の有無を判定するような一般的なラベリング処理を用いることが可能である。
【0008】
基板1601の面に平行な断面の一例を、図21Cに示す。図21Cは、図21Bにおいて破線で示した断面で切った接続箇所の断面図である。図21Cでは、半田を白、半田以外を斜線で示している。ここでは、正常、ボイド、ブリッジの3種類の状態を示した。図21Cを参照して、ボイド1607がある場合、半田内に半田がない部分が生じる。ブリッジ1608がある場合、正常時に比べ広範な領域に半田が観察される。
【0009】
検査装置は、ラベリング画像からそれぞれの半田の面積(白もしくは1の画素の個数)を計数し、半田の面積を求める。検査装置は、面積が一定の範囲内であれば良品、それ以外であれば不良とすることで、半田接合面の良否を判定する。この一定の範囲の閾値は、予めユーザにより設定されることが一般的である。
【0010】
例えば、特許文献1(特開2008−026344号公報)などには、プリント基板の検査装置が開示されている。プリント基板の検査装置の概略を図22および図23に示す。図22は、特許文献1に記載の検査装置を模式的に示す図である。図23は、X線源およびX線検出器を移動させてプリント基板を検査する検査装置の模式図である。図22および図23に示すように、プリント基板の検査装置は、プリント基板が搬送される面に対して斜めの方向からプリント基板にX線を照射する。
【0011】
ところで、一般的には、X線CTにより高画質な画像を得るためには、あらゆる方向からのX線の透視撮像を行なうことが望ましい。特許文献2(特開2006−25868号公報)には、周囲の全方向から被検体を撮像する医療用途のX線CTシステムが開示されている。
【0012】
一方、特許文献3(特開2007−139620号公報)には、コーンビーム角が大きい場合に対して有効なデータ再構成法が開示されている。特許文献3に記載のX線コーンビームCT装置は、ラドン空間のシャドウゾーンのデータを計算により補完する。
【特許文献1】特開2008−026344号公報
【特許文献2】特開2006−25868号公報
【特許文献3】特開2007−139620号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
特許文献1に記載のような検査装置では、PCBのような薄い対象物のX線CT検査を短時間で精度よく行なえなかった。したがって、PCBなどのインライン検査を実現することは困難であった。これは、X線CT検査において、撮像データの枚数と再構成データの解像度とにはトレードオフの関係があるためである。斜めCT撮像では、長軸方向からみたPCBについてのデータ(以下、垂直断面データとよぶこともある)が不足するため、再構成データの垂直断面画像の解像度が悪くなる。
【0014】
しかし、PCBの検査において、特許文献2に記載の医療検査のように対象物を周囲の全方向から撮像することは、検査時間の観点から、現実的ではない。また、PCBの長軸方向(以下、水平方向とよぶこともある)に高密度に実装されている極小の電子部品を高解像度で撮像することは困難である。
【0015】
また、特許文献3に記載の手法は、広角コーンビームCTに関するものである。特許文献3に記載の補完方法を、PCB検査に応用することは容易ではない。
【0016】
本発明は、上記のような問題を解決するためになされたものであって、対象物の検査を短時間で精度よく行なえる装置を提供することを課題とする。
【課題を解決するための手段】
【0017】
1つの局面に係る本願発明は、X線を用いて対象物を検査するX線検査装置であって、X線が対象物に複数の方向から入射するようにX線を出力するX線出力手段と、各方向から対象物に入射して対象物を透過したX線が届く位置においてX線を撮像するX線検出手段と、各位置で撮像したX線の強度分布データに基づき、対象物の複数の再構成画像データを生成する再構成手段とを備え、再構成手段は、第1の方向を法線方向とする面に対応する第1の再構成画像データを生成する第1の再構成手段を含み、第1の再構成手段は、第1の再構成画像データの生成処理において、解析法を用い、第1の方向とは異なる第2の方向を法線方向とする面に対応する対象物の第2の再構成画像データを生成する第2の再構成手段をさらに含み、第2の再構成手段は、第2の再構成画像データの生成処理において、反復法を用いる。
【0018】
好ましくは、再構成手段は、第1の再構成画像データの生成および第2の再構成画像データの生成を並行して行なう。
【0019】
好ましくは、第2の構成手段は、第1の再構成画像データを反復法の初期画像として第2の再構成画像データを生成する。
【0020】
好ましくは、再構成手段は、解析法による再構成3次元データに基づいて、第2の再構成手段が第2の再構成画像データを生成する領域を決定する決定手段をさらに含み、第2の再構成手段は、決定された領域について、第2の再構成画像データを生成する。
【0021】
好ましくは、X線出力手段は、X線が第2の方向を除く方向から対象物に入射するようにX線を出力する。
【0022】
好ましくは、対象物を法線方向が実質的に第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、X線出力手段は、搬送面の第1の側からX線を出力し、X線検出手段は、搬送面の第1の側とは異なる第2の側でX線を撮像する。
【0023】
好ましくは、対象物は、平面状の物体であり、第2の方向は、実質的に、対象物の面の法線方向であり、X線出力手段は、対象物の面に所定の角度で交わる方向からX線が対象物に入射するようにX線を出力する。
【0024】
さらに好ましくは、対象物は、平面状の物体であり、第2の方向は、実質的に、対象物の面の法線方向であり、決定手段は、解析法による再構成3次元データの対象物の面に実質的に平行な複数の断面の画素分布に基づいて、第2の再構成画像データを生成する領域を第2の方向について限定する。
【0025】
さらに好ましくは、対象物を法線方向が実質的に第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、搬送機構は、対象物を挟む一対のレールを含む。
【0026】
他の局面に係る本願発明は、X線を用いて対象物を検査するX線検査方法であって、X線が対象物に複数の方向から入射するようにX線を出力するステップと、各方向から対象物に入射して対象物を透過したX線が届く位置においてX線を撮像するステップと、各位置で撮像したX線の強度分布データに基づき、対象物の複数の再構成画像データを生成するステップとを備え、再構成画像データを生成するステップは、第1の方向を法線方向とする面に対応する第1の再構成画像データを生成するステップを含み、第1の再構成画像データを生成するステップは、第1の再構成画像データの生成処理において、解析法を用いるステップを有し、再構成画像データを生成するステップは、第1の方向とは異なる第2の方向を法線方向とする面に対応する対象物の第2の再構成画像データを生成するステップをさらに含み、第2の再構成画像データを生成するステップは、第2の再構成画像データの生成処理において、反復法を用いるステップを有する。
【発明の効果】
【0027】
本発明によれば、第1の方向を法線方向とする面に対応する再構成画像データを解析法を用いて生成し、第1の方向と異なる第2の方向を法線方向とする面に対応する再構成画像データを反復法を用いて生成する。その結果、対象物を短時間で精度よく検査することができる。
【発明を実施するための最良の形態】
【0028】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部分には同一の符号を付してある。それらの名称および機能も同じである。したがってそれらについての詳細な説明は繰り返さない。
【0029】
[第1の実施の形態]
(1.X線検査装置について)
図1は、本発明に係るX線検査装置100の概略ブロック図である。図1を参照して、本発明に係るX線検査装置100について説明する。ただし、以下で記載されている構成、寸法、形状、その他の相対配置などは、特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
【0030】
X線検査装置100は、中心軸を軸21としてX線を出力する走査型X線源10と、複数のX線検出器23.1〜23.Nが取り付けられ、各X線検出器23.1〜23.Nを指定された位置に駆動するためのX線検出器駆動部22とを備える。また、走査型X線源10とX線検出器23.1〜23.Nとの間には検査対象20が配置される。言い換えると、X線検出器23.1〜23.Nは、検査対象20を挟むように、走査型X線源10と対向した位置にある。
【0031】
つまり、走査型X線源10は、検査対象20が配置される面の第1の側に配置され、第1の側から検査対象20に向けてX線を出力する。また、各X線検出器23.1〜23.Nは、検査対象20が配置される面の第1の側とは異なる(つまり、逆側の)第2の側に配置される。
【0032】
さらに、X線検査装置100は、X線検出器駆動部22によるX線検出器23の駆動やX線検出器23.1〜23.Nからの画像データの取得を制御するための画像取得制御機構30と、ユーザからの指示入力等を受け付けるための入力部40と、測定結果等を外部に出力するための出力部50とを備える。
【0033】
また、X線検査装置100は、走査型X線源制御機構60と、演算部70と、メモリ90とをさらに備える。このような構成において、演算部70は、メモリ90に格納されたプログラム96を実行して各部を制御し、また、所定の演算処理を実施する。
【0034】
走査型X線源10は、走査型X線源制御機構60によって制御され、検査対象20に対しX線を照射する。
【0035】
図2は、走査型X線源10の構成を示す断面図である。図2を参照して、走査型X線源10においては、電子ビーム制御部62によって制御された電子銃19から、タングステンなどのターゲット11に対し電子ビーム16が照射される。そして、電子ビーム16がターゲットに衝突した場所(X線焦点位置17)からX線18が発生し、放射(出力)される。なお、電子ビーム系は、真空容器9の中に収められている。真空容器9の内部は、真空ポンプ15によって真空に保たれており、電子銃19から高圧電源14によって加速された電子ビーム16が発射される。
【0036】
走査型X線源10においては、電子ビーム16は、電子線収束コイル13により収束された後、偏向ヨーク12によって電子ビーム16を偏向することにより、電子ビーム16がターゲット11に衝突する場所を任意に変更することができる。たとえば、偏向ヨーク12によって偏向された電子ビーム16aはターゲット11に衝突し、X線焦点位置17aからX線18aが出力される。また、同様に、偏向ヨーク12によって偏向された電子ビーム16bはターゲット11に衝突し、X線焦点位置17bからX線18bが出力される。なお、特に断らない場合は、本願発明において、走査型X線源10は透過型である。また、検査対象物の検査対象部分に応じて設定されるX線の放射の起点となるべき位置(以下、「X線の放射の起点位置」と呼ぶ)からX線を発生させるにあたり、その位置の設定の自由度を高めることができるよう、リング状ではなく、連続面のターゲットであることが望ましい。また、以下の説明では、特に位置を区別して記載しない場合は、総称として、単にX線焦点位置17と示す。
【0037】
なお、X線焦点位置を、上述したX線の放射の各起点位置に移動させるには、たとえば、X線源として固定焦点型X線源を用い、X線源自体の位置を、その都度、機械的に移動させることも可能である。ただし、図2に示すような構成であれば、X線焦点位置を、X線の放射の起点位置に移動させるにあたり、一定の範囲内であれば、X線源を機械的に移動させることを必要とせず、保守性や信頼性に優れたX線検査装置を実現できる。なお、X線源を複数個設けておき、起点位置に応じて、切り替えて使用することも可能である。本発明に係るX線源は、斜めCT撮像用のものであればよい。
【0038】
言い換えると、「X線の放射の起点位置」とは、撮像に使用するX線検出器23の空間的な位置と、検査対象20の検査対象部の空間的な位置とが特定されれば、特定されうる空間的な位置のことを意味し、X線焦点位置とは、実際にX線が出力されるターゲット上の位置を意味する。したがって、「X線の放射の起点位置」にX線焦点位置をもってくるためには、走査型X線源による電子ビームの走査によることも可能であるし、あるいは、X線源そのものを機械的に移動させてもよい。
【0039】
図1に戻って、走査型X線源制御機構60は、電子ビームの出力を制御する電子ビーム制御部62を含む。電子ビーム制御部62は、演算部70から、X線焦点位置、X線エネルギー(管電圧、管電流)の指定をうける。X線エネルギーは、検査対象の構成によって異なる。
【0040】
検査対象20は、走査型X線源10とX線検出器23(以下、「X線検出器23.1〜23.N」を総称するときは、「X線検出器23」と呼ぶ)との間に配置される。検査対象20の位置の移動にあたっては、本実施の形態では、ベルトコンベアのように一方向に移動することにより検査対象を検査のための位置に配置する。ただし、X−Y−Zステージで任意の位置に移動するようにしてもよい。
【0041】
なお、検査対象がプリント実装基板のように小さい場合、上述のように、走査型X線源10とX線検出器23とは固定で検査対象を移動させることとしてもよいものの、ガラス基板など検査対象が大面積で、検査対象側を任意に移動させることが困難な場合は、走査型X線源10とX線検出器23との相対的な位置は固定したまま、走査型X線源10およびX線検出器23を移動させてもよい。
【0042】
X線検出器23は、走査型X線源10から出力され、検査対象20を透過したX線を検出して画像化する2次元X線検出器である。たとえば、I.I.(Image Intensifier)管などである。本実施の形態では、X線検出器駆動部22に複数のX線検出器を配置することから、スペース効率のよいFPD(フラットパネルディテクタ)が望ましい。また、インライン検査で使うことができるように高感度であることが望ましく、CdTeを使った直接変換方式のFPDであることが特に望ましい。
【0043】
画像取得制御機構30は、演算部70より指定された位置にX線検出器23を移動させるようにX線検出器駆動部22を制御するための検出器駆動制御部32と、演算部70から指定されたX線検出器23の画像データ98を取得するための画像データ取得部34とを含む。画像データ取得部34は、取得した画像データ98をメモリ90に格納する。
【0044】
X線検出器駆動部22により駆動されたX線検出器23の位置は位置センサ(図示しない)によって知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0045】
また、X線検出器駆動部22は、拡大率を調整するために上下に昇降できることが望ましい。この場合、X線検出器駆動部22の上下方向の位置をセンサ(図示しない)により知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0046】
なお、本実施の形態では、X線検出器23.1〜23.Nと、X線検出器駆動部22と、画像取得制御機構30とを組み合わせて、検査対象20を透過したX線を検出している、しかし、X線の検出方法はこれに限られるわけではない。X線検査装置100は、いろいろな方向から検査対象20に入射し検査対象20を透過したX線が届く位置でX線を検出できる機構を備えていればよい。例えば、X線検査装置100は、より多くの固定されたX線検出器によりX線を検出しても構わない。また、複数のX線検出器のかわりに、単体のX線検出器を使用してもよい。
【0047】
入力部40は、ユーザの入力を受け付けるための操作入力機器である。出力部50は、演算部70で構成されたX線画像等を表示するためのディスプレイである。すなわち、ユーザは、入力部40を介して様々な入力を実行することができ、演算部70の処理によって得られる種々の演算結果が出力部50に表示される。出力部50に表示される画像は、ユーザによる目視の良否判定のために出力されてもよいし、あるいは、後で説明する良否判定部78の良否判定結果として出力されてもよい。
【0048】
演算部70は、走査型X線源制御部72と、画像取得制御部74と、再構成部76と、良否判定部78と、検査対象位置制御部80と、X線焦点位置計算部82と、撮像条件設定部84とを含む。プロセッサに相当する演算部70は、メモリ90に格納されたプログラム96を実行し、上述の各部の機能を実現するものとする。ただし、演算部70の機能の一部もしくは全部は、ハードウェア的に実現されても構わない。
【0049】
走査型X線源制御部72は、X線焦点位置、X線エネルギーを決定し、走査型X線源制御機構60に指令を送る。
【0050】
画像取得制御部74は、X線検出器駆動部22により指定位置まで駆動されるX線検出器23のうち、画像を取得するX線検出器23を決定し、画像取得制御機構30に指令を送る。また、画像取得制御機構30から、画像データを取得する。
【0051】
再構成部76は、画像取得制御部74により取得された複数の画像データから3次元データを再構成する。
【0052】
良否判定部78は、再構成部76により再構成された3次元データあるいは、透視データをもとに検査対象の良否を判定する。たとえば、半田ボールの形状を認識し、当該形状が予め定められた許容範囲内であるか否かを判定する等により良否判定を行なう。なお、良否判定を行なうアルゴリズム、あるいは、アルゴリズムへの入力情報は、検査対象によって異なるため撮像条件情報94から入手する。
【0053】
検査対象位置制御部80は、検査対象20を移動させる検査対象位置駆動機構110を制御する。
【0054】
X線焦点位置計算部82は、検査対象20のある検査エリアを検査する際に、その検査エリアに対するX線焦点位置や照射角などを計算する。
【0055】
撮像条件設定部84は、検査対象20に応じて、走査型X線源10からX線を出力する際の条件を設定する。たとえば、X線源に対する印加電圧、撮像時間等である。
【0056】
メモリ90は、X線焦点位置計算部82によって計算されたX線焦点位置が格納されるX線焦点位置情報92と、撮像条件設定部84によって設定された撮像条件や、良否判定を行なうアルゴリズムに関する情報などが格納される撮像条件情報94の他、上述した演算部70が実行する各機能を実現するためのプログラムとを含む。なお、メモリ90は、データを蓄積することができればよく、RAM(Random Access Memory)やEEPROM(Electrically Erasable and Programmable Read−Only Memory)やHDD(Hard Disc Drive)等の記憶装置により構成される。
【0057】
図3は、X線検査装置100の構成を説明するための図である。なお、図1と同一部分には、同一符号を付しており、かつ、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0058】
図3を参照して、X線検出器駆動部22は、X線検出器23.1および23.2をそれぞれ、XYθの自由度で駆動可能なXYθ動作機構となっており、X線源10としては、走査型X線源が用いられている。なお、X線検出器駆動部22は、図3に示したアーム型の駆動機構に限られるわけではない。各X線検出器23を任意の位置に移動・回転させる役割を果たすものであれば、X線検出器駆動部22として用いることできる。
【0059】
図3に示した構成では、検査対象の位置を動かすために、検査対象位置駆動機構110と、検査対象位置制御部80とが設けられている。
【0060】
また、図3においては、2つの独立に移動可能なX線検出器を使用しているが、X線検出器が2つ以上設けられていてもよい。また、固定された複数のX線検出器を用いてもよい。この場合、検査に必要な方向の各撮像データが、いずれかのX線検出器で撮像できるように、各X線検出器が配置されているものとする。ただし、以下では、2つの独立に移動可能なX線検出器を使用する例について説明する。
【0061】
X線検出器23.1とX線検出器23.2は、独立にX-Y-θ動作が可能である。なお、X線検出器23の駆動の仕方によって、θ回転の機構は必ずしも設けられていなくてもかまわない。
【0062】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、X線検出器23の移動・回転を行う。ただし、このようなX−Y方向の移動またはX−Y平面内でのθ回転を可能とする構成であり、X線検出器23の移動に対して同様の機能を持つものであれば、これ以外の機構を用いることも可能である。
【0063】
また、検査対象の視野は、演算部70内の検査対象位置制御部80に制御される検査対象位置駆動機構110により、上記X線検出器23.1または23.2とは独立にX−Y−Z動作が可能である。さらに、上述のとおり、X線源10の走査型X線源は、X線焦点位置17をX線ターゲット上の任意の位置へ高速に移動させることが可能である。
【0064】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査型X線源制御機構60に命令を送り、後に説明するような検査処理のためのフローチャートで示されるプログラムを実行する。また、入力部40からの入力によって検査装置の動作を制御し、各部の状態、または検査結果を出力部50より出力することができる。
【0065】
検査対象位置駆動機構110は、検査対象20を固定する一対のレール112と、変位計114とを備える。各レール112は、検査対象20の左端または右端を上下から挟み、基板を固定する。ここでは、左右をY軸に沿って、上下をZ軸に沿って定義している。レール112は、検査対象位置制御部80からの命令によって検査対象を水平(X−Y)および垂直(Z)方向に移動可能である。本実施の形態では、検査対象位置駆動機構110は、検査対象20を、ほぼXY平面(水平面)に平行な、つまり、法線方向が実質的にZ方向である搬送面に沿って搬送するものとする。ここで、「法線方向が実質的にZ方向である」とは、搬送面が検査に支障のない範囲で(例えば、0〜5度)水平面から傾いていてもよいことを意味する。
【0066】
変位計114は、検査対象20の反りを計測する。特に、プリント基板への部品の実装には、リフローといったような加熱処理工程が含まれるため、一般に、熱によりプリント基板が変形し、反りが生じる。通常の外観検査であれば、バックアップピンと呼ばれる支持棒により基板の反りを軽減できる。しかしながら、X線検査では、バックアップピンが画像に写りこんでしまうため、バックアップピンを使用できない。よって、複数の検査対象20を測定するにあたっては、X線検査装置100は、変位計114の測定結果に基づいて、Z方向の検査領域を補正している。
【0067】
検査対象位置駆動機構110は、検査対象20の上下面を覆わない。そのため、X線は、検査対象20を透過することができる。ただし、検査対象位置駆動機構110の構成は、上述のものに限られない。例えば、X線を透過するX−Yステージを検査対象位置駆動機構110として用いてもよい。しかしながら、多くの検査対象20を検査するためには、図示した検査対象位置駆動機構110が好適である。
【0068】
検査対象20は、平面状の物体であるものとする。また、検査対象20は、検査対象20の面が、XY平面とほぼ平行に、つまり、法線方向が実質的にZ方向である平面上に配置されているものとする。したがって、検査対象20の長軸方向は、Z方向と実質的に直交する。ここで、「長軸方向は、Z方向と実質的に直交する」とは、長軸方向とZ方向とのなす角度が、検査に支障のない範囲で90度と異なっていてもよい(例えば、85〜95度であってもよい)ことを意味する。
【0069】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。
【0070】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0071】
走査型X線源10は、走査型X線源制御機構60を通した演算部70からの命令に従って、電子線を発生させ、電子線収束コイル13および偏向ヨーク12とによってターゲット上の指定された位置に電子線を収束させ、X線焦点位置17を高速に移動させる。
【0072】
走査型X線源10は、複数の方向から検査対象20にX線が入射するように、X線を出力する。検査対象20の面へのX線の入射角度は、X線の走査範囲やX線の検出位置によって制限される角度内にある。ただし、検査対象20のX線の入射方向は、検査対象20と走査型X線源10との位置関係のため、検査対象20の長軸方向を含むことはない。
【0073】
(2.再構成手法について)
ここで、X線データ再構成についての一般的な説明をしておく。X線データ再構成は、検査対象物の外部から照射したX線が、検査対象物によってどれだけ吸収(減衰)されたかを複数の角度から計測することにより、検査対象物内部のX線吸収係数の分布を求める手法である。
【0074】
なお、以下では、X線源としては、いわゆる走査型X線源を用いて測定が行なわれるものとして説明を行なう。
【0075】
図4は、データ再構成手法を説明するための図である。図4を参照して、X線検出器Daに対応するX線焦点Faから発せられたX線は検査対象(図示していない)を透過してX線検出器Daの画素Paに到達する。X線が検査対象を透過することによって、X線量(X線強度)は検査対象を構成する部品等のそれぞれが有する固有のX線吸収係数に相当する分だけ減衰する。X線強度の減衰量は検出器画素Paの画素値として記録される。
【0076】
X線焦点Faから発せられるX線強度をIとし、X線焦点Faから検出器画素PaまでのX線が通過した経路をtとし、検査対象におけるX線吸収係数分布をf(x,y,z)
とすると、検出器画素Paに到達したX線の強度Iaは以下の式(1)で表される。
【0077】
【数1】
【0078】
この式の両辺の対数をとると、経路tに沿ったX線吸収係数分布が以下の式(2)のように線積分値により表わされる。このX線吸収係数分布をX線検出器により計測した値を投影データと呼ぶ。すなわちX線検出器はX線減衰量分布(X線強度分布と置き換えてもよい)を検出する。
【0079】
【数2】
【0080】
CTにおいて投影データから対象物の3次元データを生成するアルゴリズムは、大きく、解析的手法(解析法)および反復的手法(反復法)の2つに分類される。
【0081】
解析法は、投影画像を重ね合わせて3次元データを得るものである。解析法には、フーリエ変換法、FBP法(Filtered Back−Projection method、フィルタ補正逆投影法)などがある。
【0082】
反復法は、実際の投影画像と仮定した再構成データの投影画像とを比較し、両者が一致しない場合、再構成データを修正するという手順を何度も繰り返して、少しずつ対象物に近い再構成データを得るものである。反復法には、代数法、統計法などがある。反復法は、全ての方向の投影画像を参照して再構成データを更新する同時的反復法と1つの方向のみの投影画像を参照して再構成データを更新する逐次的反復法とに分類される。
【0083】
以下、解析法および反復法のそれぞれについて具体的に説明する。
(解析的手法の説明)
図4に示すように、解析的手法を用いるにあたっては、1つの検査対象物(あるいは
検査対象物の1つの部分)に対して、X線検出器Daの配置とは異なる位置に配置されたX線検出器Dbに対して、焦点Fbから発せられて到達したX線強度Ibについての投影データを検出する。このような投影データを、実際には、1つの検査対象物(あるいは検査対象物の1つの部分)に対して、複数の配置について検出することで、これらの投影データから検査対象物の3次元データを再構成することになる。
【0084】
図5は、図4に示した検査対象物における視野FOV、視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。再構成画素Vの部分を透過したX線は、X線検出器Da、Db上に像を結ぶにあたり、(焦点から再構成画素Vまでの距離)対(焦点からX線検出器までの距離)の比に応じて拡大された像を結ぶことになる。
【0085】
Feldkampらは、この式(2)をもとに3次元データ再構成を行なうための再構成アルゴリズムを提案した。このアルゴリズム(いわゆるFeldkamp法)は、L.A.Feldkamp,L.C.Davis and J.W.Kress,“Practical cone−beam algorithm”,Jounrnal of the Optical Society oFamerica.A, 612−619(1984)に示されているように、公知技術であるのでここでは詳細に説明しない。以下では一般的な手法の一つであるFBP法(Filtered Back−Projection法:フィルタ補正逆投影法)について簡単に説明する。
【0086】
投影データから、X線が通過した経路tに沿って投影データを加算してX線吸収係数分布f(x,y,z)を求める操作を逆投影と呼ぶ。ただし、単純に投影データを加算すると撮像系の点広がり関数によりボケが生じるため、投影データにフィルタをかける。このフィルタにはたとえばShepp−Loganフィルタ等の高周波強調フィルタが用いられる。フィルタをかける方向は、X線の透過経路の方向に対し垂直方向が望ましいとされているが、Feldkamp法では投影データの透過経路の方向が全て同一と近似しフィルタリングを行っており、検査可能な画像を再構成することができる。
【0087】
以下に、本実施形態におけるデータ再構成の手順を示す。まず、X線検出器Daの検出器画素Paの投影データpaをフィルタリングした値pa′を再構成画素Vの画素値vに加算する。さらに、X線検出器Dbの検出器画素Pbの投影データpbをフィルタリングした値pb′を再構成画素Vの画素値vに加算する。すると、v=pa′+pb′となる。この逆投影操作を全てのX線検出器もしくは一部のX線検出器に対して行なうことで、最終的な再構成画素Vの画素値vは以下の式(3)に従って表わされる。
【0088】
【数3】
【0089】
この操作を再構成領域(視野)FOV内の全ての再構成画素Vに対して行なうことにより、検査対象のX線吸収係数分布が求められて再構成データが得られる。
【0090】
図6は、このようなフィルタ補正逆投影法の処理手順を示すフローチャートである。
図6を参照して、解析的手法での処理が開始されると(ステップS5002)、まず、複数撮像した投影データのうちから処理対象となる投影データの選択が行なわれる(ステップS5004)。次に、選択された投影データにフィルタをかける処理を行なう(ステップS5006)。
【0091】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択し(ステップS5008)、再構成画素Vに対応する検出器画素を求める(ステップS5010)。
【0092】
続いて、再構成画素Vにフィルタリングした画素値を加算し(ステップS5012)、全ての再構成画素について加算を行なったかが判断される(ステップS5014)。全ての再構成画素について処理が終わっていなければ、処理はステップS5008に復帰し、終了していれば、処理は、ステップS5016に移行する。
【0093】
ステップS5016では、全ての投影データについて処理を行なったかが判断される。全ての投影データについて終了していなければ、処理はステップS5004に復帰する。一方、全ての投影データについて終了していれば、再構成データ生成が終了する(ステップS5018)。
【0094】
(反復的手法の説明)
反復的手法では、検査対象のX線吸収係数分布f(x,y,z)と投影データln(I/Ia)とを方程式と見なし再構成する。
【0095】
図7は、走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。一方、図8は、図7の概念図を上面から見た上面図である。
【0096】
以下に、図7および図8を参照して、反復的手法で再構成する手順について説明する。再構成データの画素値を一列に並べたベクトルν(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν」と記す)と、投影データを一列に並べたベクトルp(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「p」と記す)を以下の式(4)および式(5)で表現する。
【0097】
以下では、たとえば、再構成画素Vの値をある値に仮定したときにX線焦点FaからのX線がX線検出器Da上に結ばれると計算される画像についての画素を中間投影画素Qaとし、実際にX線検出器Da上で観測された画素を検出器画素Paと呼ぶ。X線検出器Dbについても、それぞれ、中間投影画素Qb、検出器画素Pbと呼ぶ。
【0098】
反復的手法では、仮定された再構成画素ベクトルνとこれに対応する中間投影データベクトルqに対して、以下に説明するように、中間投影データベクトルqが、実際に測定された検出器画素値PaまたはPbを投影データと一致するとみなせるまで、仮定されたベクトルνを更新する反復演算により解νを求める。
【0099】
【数4】
【0100】
ただし、Jは再構成領域(視野)内の画素数、Iは投影データの画素数である。また、Tは転置を示す。νとpを関係付ける投影演算を以下の式(6)のI×J係数行列で表す。
【0101】
【数5】
【0102】
この時、反復的手法でのデータ再構成は、以下の式(7)線形方程式を解いてνを求める問題として定式化できる。
【0103】
【数6】
【0104】
つまり、vjがpiに対する寄与をwijとする。なお、Wは再構成データの画素値νが投影データの画素値pに対してどの程度寄与するかを表しており、X線焦点とX線検出器の幾何学的位置から求めることができ、検出確率もしくは重みと呼ばれることもある。
【0105】
反復的手法には、方程式を代数的に解く手法や統計的な雑音を考慮した手法等が考案されているが、以下に一般的に用いられている代数的手法であるSART(Simultaneous Algebraic Reconstruction Technique)について説明する。詳細は、A.H.Anderson and A.C.Kak,“SIMULTANEOUS ALGEBRAIC RECONSTRUCTIONTECHNIQUE(SART):A SUPERIOR IMPLEMENTATION OF THE ART ALGORITHM”,ULTRASONIC IMAGING 6, 81−94(1984)に記載されている。
【0106】
SARTでは、最初に、以下の式(8)で表される初期データν0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν0」と記す)を仮定する。
【0107】
【数7】
【0108】
初期データν0は全て0のデータでもよいし、CAD(Computer Aided Design)データ等から取得したデータを仮定してもよい。
【0109】
次に、投影演算Wを用いて以下の式(9)で表される中間投影データq0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「q0」と記す)を生成する。
【0110】
【数8】
【0111】
中間投影データq0の生成は、1つの投影データに対し行ってもよいし、複数の投影データに対し行ってもよい。以下は1つの投影データに対し行ったものとして説明する。
【0112】
生成した中間投影データq0とX線検出器から取得された投影データpを比較する。比較方法は差をとる方法と除する方法があるが、SARTでは差(p−q0)をとる。
【0113】
初期データν0を更新する。更新に用いる式(反復式)は式(10)のようになる。
【0114】
【数9】
【0115】
なお、式(10)中の以下の式(11)および式(12)は、予め計算しておくことで更新の計算時間を短縮することができる。
【0116】
【数10】
【0117】
上記の計算により生成された再構成データを初期データとして代入し、同一の処理を複数回反復させることで再構成データが得られる。
【0118】
図9は、反復的手法の処理を説明するためのフローチャートである。
図9を参照して、まず、反復的手法による処理が開始されると(ステップS5102)、続いて、初期データの設定が行なわれる(ステップS5104)。上述のとおり、初期データとしては、たとえば、全てが0の値でもよい。次に、複数のX線検出器位置に対応する複数の投影データのうちから処理対象となる投影データを選択する(ステップS5106)。
【0119】
中間投影データを生成する。中間投影データの生成方法は上述したとおりである。(ステップS5108)。
【0120】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択し(ステップS5110)、再構成画素Vに対応する検出器画素を求める(ステップS5112)。
【0121】
反復式をもとに、再構成画素Vの値を更新する(ステップS5114)。
次に、全ての再構成画素について更新を行ったかが判断され(ステップS5116)、全ての再構成画素について処理が終わっていなければ、処理はステップS5110に復帰し、終了していれば、処理は、ステップS5118に移行する。
【0122】
ステップS5118では、全ての投影データについて処理を行なったかが判断される。全ての投影データについて終了していなければ、処理はステップS5106に復帰する。一方、全ての投影データについて終了していれば、処理はステップS5120に移行する。
【0123】
ステップS5120では、規定の反復回数だけ処理を行ったかが判断され、反復していなれば、処理はステップS5104に復帰して現在の再構成画素値を初期データとして採用して処理を繰り返し、処理を規定回数だけ反復していれば、再構成データ生成が終了する(ステップS5122)。
【0124】
以上のようにX線検出器により取得された投影データから、検査対象物の3次元画像を再構成できる。
【0125】
ただし、解析的手法では、フィルタリング処理をX線検出器の各画素に対して行う場合の計算の容易さ等の理由から、複数の投影データの各々を取得するために、X線検出器および焦点と対象物との相対位置を変更した場合でも、X線の焦点とX線検出器との相対的な配置は、一定の関係を維持することが望ましい。言い換えると、焦点からX線検出器を見たときには、見通される立体角内の対象物の視野に含まれる部分の角度・対象物内の位置等は変化しても、焦点とX線検出器との位置関係は、一定のままであることが望ましい。しかも、上記のような逆投影法を行なうにあたっては、アーチファクト等の低減のためには、複数の投影データは、対象物の視野に含まれる部分について、等角度ごとに取得されることが望ましい。
【0126】
これに対して、反復的手法では、このようなX線の焦点とX線検出器との相対的な配置に、このような制限はない。
【0127】
(解析法および反復法の特徴)
一般に解析法および反復法には次のような特徴がある。解析法は、精度のよい再構成データを得るために多くの枚数の投影画像を必要とするが、再構成にかかる計算時間は短い。一方、反復法は、少ない枚数の投影画像から精度のよい3次元データを再構成できるが、再構成にかかる計算時間が長い。
【0128】
さらに、PCBの検査の観点からは、解析法および反復法には次のような特徴がある。
解析法は、投影像をフィルタリングした上で逆投影するため、解析法による再構成データを切り出して得られる2次元断面画像(再構成画像とよぶ)においてはエッジが強調される。したがって、解析法は、吸収係数に差が出る検査、例えば、ボイド、異物混入検査等に適している。その反面、解析法には、斜めCT撮像が原因で、PCBの長軸(水平)方向を実質的に法線方向に持つ面に対応する再構成画像(以下、垂直断面画像とよぶ)が不鮮明となるという問題がある。これを防ぐためには、投影数を多くする必要がある(例えば32枚)。よって、解析法を用いた薄い対象物のX線CT検査には、多くの撮像時間が必要であり、結果として、時間がかかる。
【0129】
一方、反復法による再構成データを用いると、解析法と異なり撮像位置によらず高画質の再構成画像を生成できる。そのため、長軸方向からの撮像データ(垂直断面データ)の不足があっても、高画質な画像を生成できる。したがって、反復法は、垂直断面の形状が必要なぬれ検査等に適している。しかし、反復計算の計算量は大きいため、反復法を用いた薄い対象物のX線CT検査には、多くの計算時間がかかる。また、反復法には、ボイド検査に適さないという問題がある。反復計算により得られる再構成画像のエッジはぼやけるためである。
【0130】
図10を参照して、解析法および反復法の特性についてまとめておく。図10は、解析法および反復法の特性について説明するための図である。なお、図10の横軸には、投影数、すなわち、投影画像の枚数を示す。ただし、図10に示した投影数は目安であって、投影数は、これに限られるわけではない。
【0131】
図10に示す領域1では、解析法および反復法のいずれを用いても精度のよい検査が行なえる。つまり、投影数が多い場合は、解析法および反復法のいずれを用いてもよい。また、水平断面検査の1つである異物ブリッジ検査を行なう場合には、投影数によらず、解析法および反復法のいずれを用いてもよい。ただし、計算時間を考慮に入れると、領域1では、解析法を用いる方が好ましい。
【0132】
図10に示す領域2では、解析法を用いて検査を行なうことが好ましい。つまり、水平断面検査の1つであるボイド検査を行なう場合には、解析法を用いることが好ましい。これは、上述の通り、解析法によれば、エッジが強調された再構成画像が得られるためである。
【0133】
図10に示す領域3では、反復法を用いて検査を行なうことが好ましい。つまり、垂直断面検査であるぬれ検査を行なう場合には、反復法を用いることが好ましい。これは、上述の通り、投影数が少ない場合に解析法で得られる垂直断面の再構成画像は、不鮮明だからである。
【0134】
以上説明してきたように、解析法および反復法のいずれを用いて検査するのが好ましいかは、検査種類と投影数とによる。
【0135】
解析法および反復法のそれぞれで得られる再構成画像の具体例を図11に示す。図11Aは、解析法で得られる再構成画像の具体例を示す図であり、図11Bは、反復法で得られる再構成画像の具体例を示す図である。
【0136】
図11Aを参照して、再構成画像5a〜5iは、計算機による球状の物体の複数の投影画像から再構成された水平断面画像である。再構成画像5a〜5cは、それぞれ、解析法、逐次的反復法、同時的反復法によって8枚の投影画像を基に計算された。再構成画像5d〜5fは、それぞれ、解析法、逐次的反復法、同時的反復法によって16枚の投影画像を基に計算された。再構成画像5e〜5iは、それぞれ、解析法、逐次的反復法、同時的反復法によって32枚の投影画像を基に計算された。なお、図11Aには、参照のため、計算機による水平断面の投影画像4も示している。
【0137】
図11Bを参照して、再構成画像7a〜7iは、計算機による球状の物体の複数の投影画像から再構成された垂直断面画像である。再構成画像7a〜7cは、それぞれ、解析法、逐次的反復法、同時的反復法によって8枚の投影画像を基に計算された。再構成画像7d〜7fは、それぞれ、解析法、逐次的反復法、同時的反復法によって16枚の投影画像を基に計算された。再構成画像7e〜7iは、それぞれ、解析法、逐次的反復法、同時的反復法によって32枚の投影画像を基に計算された。なお、図11Bには、参照のため、計算機による水平断面の投影画像6も示している。また、再構成画像7a〜7iには、水平断面の投影画像6における物体の外周に対応する箇所を点線で示している。
【0138】
図11Aおよび図11Bを参照して、対象物を垂直方向から見た解析法による再構成画像の分解能は高いが、対象物を水平方向から見た解析法による再構成画像は間延びしていることがわかる。一方、反復法による再構成画像では、水平方向についても球状の物体が再現されている。
【0139】
以上説明してきたように、解析法あるいは反復法のいずれか一方を用いる手法では、短時間で対象物を精度よく検査することができない。特に、この手法では、水平方向の検査および垂直方向の検査を両方とも短時間で精度よく検査できない。本実施の形態に係るX線検査装置100は、以下で詳しく説明するように、解析法と反復法とを組み合わせることにより、対象物を短時間で精度よく検査することができる。
【0140】
(3.X線検査の概略)
図12を参照して、X線検査装置100によるX線検査の概略について説明する。図12は、X線検査装置100によるX線検査の概略をフローチャート形式で示した図である。
【0141】
図12を参照して、まず、処理が開始されると(ステップS1200)、演算部70の検査対象位置制御部80からの命令により、検査対象位置制御機構110は、検査対象の検査部分(視野)を撮像可能な位置に移動する(ステップS1202)。すなわち、透視画像を撮像するために、検査対象をのせたステージとX線検出器を所定の位置に移動する。各構成要素の位置の移動は予め決められていることが通常で、マグネスケール等で読み取ることができるが、レーザー変位計等を用いてもよい。また、通常、検査においては、検査位置の特定のために光学カメラ(図示せず)が搭載されているため、光学カメラの画像をもとに位置を決めることが可能である。その他の方法として、検査対象のCADデータをもとに自動的に決めてもよいし、作業者が目視で行ってもよい。
【0142】
その上で、まずは、透視画像の撮像を行なう(ステップS1204)。具体的には、X線検査装置100は、X線の照射の開始とともに、X線焦点を所定位置に移動させてX線検出器の露光を開始する。一定時間後に露光を終了し、得られた画像を検査装置制御機構へ転送する。
【0143】
演算部70の良否判定部78は、透視画像を検査して、取得した透視画像から検査対象の視野(透視画像で撮像されている範囲)の良否判定を行う(ステップS1206)。良否判定手法は、様々な手法が提案されており、公知のためここでは詳細を記述しない。例えば、もっとも基本的な検査としては、透視画像を一定の値で2値化し、CADデータ等の設計情報と比較し、透視画像上の所定の位置に部品があるかないかを面積により判断する。
【0144】
続いて、演算部70は、再構成画像による検査が必要か否かを判断する(ステップS1208)。判断の基準は、CADデータ等の設計情報をもとに予め設定しておくことができる。また、演算部70は、透視画像の良否判定結果から再構成画像による検査が必要か否かを判断することも可能である。例えば、実装基板の検査において、片面にのみ部品が実装されている場合、透視画像で良否判定することが可能なため再構成画像による良否判定を行なう必要がない場合もある。
【0145】
演算部70は、再構成画像による検査が必要ない場合には、検査を終了させる(S1218)。
【0146】
一方、演算部70は、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行わせる(S1210)。ここで、「視野」とは、再構成してモニタに映る範囲のことである。X線検査装置100は、ステップS1204における透視画像撮像範囲と同様の領域およびデータ再構成にあたり必要となる他の領域を視野として設定する。CT撮像においては、検査対象内の視野を複数の方向から撮像する。
【0147】
なお、複数方向からの撮像は、走査型X線源10の焦点位置の移動により実現するのが好ましい。なぜならば、焦点の移動時間は、X線検出器23やステージを機械的に移動するのにかかる時間よりも100分の1程度短いためである。
【0148】
次に、演算部70の再構成部76は、複数方向の撮像画像から解析法による再構成データおよび反復法による再構成データを生成する(ステップS1212)。さらに、ステップS1212において、再構成部76は、解析法による再構成データを用いて水平断面画像を生成する。再構成部76は、反復法による再構成データを用いて垂直断面画像を生成する。ステップS1212で再構成部76が行なう処理の詳細については、後述する。
【0149】
ここで、垂直断面画像は、対象物の長軸方向を実質的に法線方向とする垂直断面に対応する再構成画像である。ここで、「長軸方向を実質的に法線方向とする」とは、得られる垂直断面画像を垂直断面検査に用いることができる範囲で、垂直断面の法線方向が長軸方向と一致していなくてもよいことを意味する。
【0150】
また、水平断面画像は、対象物の長軸方向と実質的に直交する方向を法線方向とし、検査対象20の面にほぼ平行な水平断面に対応する再構成画像である。ここで、「長軸方向と実質的に直交する方向を法線方向とし」ならびに「検査対象20の面にほぼ平行な」とは、得られる水平断面画像を水平断面検査に用いることができる範囲で、水平断面の法線方向が長軸方向と一致していなくてもよいことを意味する。
【0151】
したがって、本実施の形態に係るX線検査装置100によれば、対象物を精度よく短時間で検査できる。反復法あるいは解析法の一方を用いる場合に比べ、少ない枚数の撮像データに基づいて、垂直方向検査および水平方向検査のそれぞれに適した再構成画像を得られる。
【0152】
続けて、演算部70の良否判定部78は、再構成画像(垂直断面画像および水平断面画像)による対象物の良否判定を行う(ステップS1214)。良否判定手法は周知であるため検査項目に適した良否判定手法を用いればよく、ここでは詳細の説明は繰り返さない。例えば、良否判定部78は、2値化画像内の半田面積に基づいて、実装基板の良否を判定する。
【0153】
さらに、演算部70は、全視野の検査を終了したか否かを判断し(ステップS1216)、終了していない場合は、検査対象位置制御機構を制御し、検査対象の検査部分(視野)を変更する(ステップS1220)。そのあと、演算部70は、処理を、ステップS1204に復帰させる。一方で、演算部70は、全視野について検査が終了していれば、本検査を終了させる(ステップS1218)。インライン検査では、検査すべき範囲(複数の視野の集まり)が決まっているため、演算部70は、全視野の検査が終了したかどうかを容易に判断できる。もしくは、作業者が、全視野の検査が終了したか判断し、X線検査装置100に指示を与えてもよい。
【0154】
なお、図12中では、透視画像と再構成画像で検査を行っているが、透視画像による検査を行なわずに、再構成画像による検査のみを行うことも可能である。ただし、通常、再構成処理は比較的時間がかかるため、再構成画像による検査の前に、透視画像で良否判定をすることで全体の検査時間を短くすることができる。
【0155】
(4.第1の実施の形態に係るデータ再構成処理)
第1の実施の形態に係るX線検査装置100の再構成部76は、上述のステップS1212(データ再構成処理)において、解析法による再構成の計算と反復法による再構成の計算とを並列に行なう。並列に2つの計算を行なうため、2つの計算を直列に行なう場合に比べ、検査時間を短縮できる。計算を並列して行なうことで計算の待ち時間がなくなる、つまり、一方の計算終了を待って他方の計算を始める必要がないからである。
【0156】
再構成部76は、解析法の計算と反復法の計算とを並列して実行できる必要がある。例えば、複数の計算機を再構成部76として用いればよい。ただし、近年では、複数のCPUを搭載した計算機が普及してきている。このような計算機1台を、再構成部76として用いてもよい。
【0157】
図13を参照して、第1の実施の形態に係る再構成部76の処理について説明する。図13は、第1の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【0158】
図13に示すように、再構成部76は、解析法による再構成処理(ステップS1301〜ステップS1313)と、反復法による再構成処理(ステップS1315〜ステップS1329)とを、並行して行なう。
【0159】
まず、解析法による再構成処理について説明する。
ステップS1301において、再構成部76は、再構成に用いる投影データ(あるいは投影データの組)を一つ選択する。通常は、再構成部76は、投影データに予めつけられた番号に基づいて、投影データを順番に選択する。再構成部76は、選択する番号をインクリメントすることで、投影データを順番に選択する。
【0160】
ステップS1303において、再構成部76は、選択した投影データに高周波強調フィルタによるフィルタリング処理を施す。
【0161】
ステップS1305において、再構成部76は、逆投影する再構成画素を一つ選択する。通常、再構成部76は、再構成画素に予めつけられた番号に基づいて、再構成画素を順番に選択する。再構成部76は、選択する番号をインクリメントすることで、再構成画素を順番に選択する。
【0162】
ステップS1307において、再構成部76は、選択した再構成画素に逆投影される検出器画素を計算する。つまり、再構成部76は、再構成画素を通るX線が検出器のどのセンサ画素に入射したかを計算する。X線の経路は、X線焦点位置、再構成画素位置から幾何学的に計算でき、検出器の位置は既知である。したがって、再構成部76は、検出器のどの画素にX線が入射したかが計算できる。
【0163】
ステップS1309において、再構成部76は、ステップS1307で計算した再構成画素に対応するセンサ画素の画素値を、再構成画素の画素値に加算する。この時、加算される値は、ステップS1303のフィルタリング後の値である。
【0164】
なお、サンプリングの問題からX線が入射する画素が複数にまたがることがある。その際は、検出器画素の周囲4点の線形補間等を用いればよい。容易に想像がつくように、補間精度と計算時間とは、トレードオフの関係にある。
【0165】
ステップS1311において、再構成部76は、全ての再構成画素に対してステップS1305からステップS1309までの処理を行なったかどうかを判断する。再構成部76は、例えば、全ての再構成画素について処理を行なったどうかを、逆投影した再構成画素数をインクリメントしておき、予め定めておいた総再構成画素数を超えたか超えないかにより判断する。
【0166】
全ての再構成画素について処理が終わっていなければ(ステップS1311においてNo)、処理はステップS1305に復帰し、終了していれば(ステップS1311においてYes)、処理は、ステップS1313に移行する。
【0167】
ステップS1313において、再構成部76は、全ての投影データについて、ステップS1301からステップS1311までの処理を行なったどうかを判断する。再構成部76は、例えば、全ての投影データについて行なったかどうかを、選択した投影データ数をインクリメントしておき、撮像した総投影データ数を超えたか超えないかにより判断する。
【0168】
全ての投影データについて処理が終わっていなければ(ステップS1313においてNo)、処理はステップS1301に復帰し、終了していれば(ステップS1313においてYes)、再構成部76は、解析法によるデータ再構成処理を終了する。
【0169】
ステップS1314において、再構成部76は、解析法による再構成データの垂直断面を切り出して、垂直断面画像を生成する。
【0170】
続いて、反復法による再構成処理について説明する。
ステップS1315において、再構成部76は、再構成に用いる初期データを設定する。1回目の反復処理における初期データは全て0のデータでもよいし、CADデータ等から取得したデータを仮定してもよい。
【0171】
2回目以降の反復処理における初期データについては、再構成部76は、直前の再構成データを初期データに設定する。つまり、2回目の反復処理の初期データは、1回目の反復処理で得られた再構成データとなり、n回目の反復処理の初期データは、(n−1)回目の反復処理で得られた再構成データとなる。
【0172】
ステップS1317において、再構成部76は、再構成に用いる投影データ(あるいは投影データの組)を一つ選択する。通常は、再構成部76は、投影データに予めつけられた番号に基づいて、投影データを順番に選択する。再構成部76は、選択する番号をインクリメントすることで、投影データを順番に選択する。
【0173】
ステップS1319において、再構成部76は、投影演算Wを用いて中間投影データを生成する。再構成部76は、中間投影データを、1つの投影データに対して生成してもよいし、複数の投影データに対して生成してもよい。以下では、再構成部76が1つの投影データに対して中間投影データを生成したものとして説明する。
【0174】
ステップS1321において、再構成部76は、逆投影する再構成画素を一つ選択する。通常は、再構成部76は、再構成画素に予めつけられた番号に基づいて、再構成画素を順番に選択する。再構成部76は、選択する番号をインクリメントすることで、再構成画素を順番に選択する。
【0175】
ステップS1323において、再構成部76は、初期データを更新する。更新に用いる式(反復式)としては、式(10)を用いるものとする。
【0176】
ステップS1325において、再構成部76は、全ての再構成画素に対してステップS721およびステップS723の処理を行なったかどうかを判断する。再構成部76は、例えば、全ての再構成画素について処理を行なったどうかを、逆投影した再構成画素数をインクリメントしておき、予め定めておいた総再構成画素数を超えたか超えないかにより判断する。
【0177】
全ての再構成画素について処理が終わっていなければ(ステップS1325においてNo)、処理はステップS1321に復帰し、終了していれば(ステップS1325においてYes)、処理は、ステップS1327に移行する。
【0178】
ステップS1327において、再構成部76は、全ての投影データについて、ステップS1315からステップS1325までの処理を行なったどうかを判断する。再構成部76は、例えば、全ての投影データについて行なったかどうかを、選択した投影データ数をインクリメントしておき、撮像した総投影データ数を超えたか超えないかにより判断する。
【0179】
全ての投影データについて処理が終わっていなければ(ステップS1327においてNo)、処理はステップS1317に復帰し、終了していれば(ステップS1327においてYes)、処理は、ステップS1329に移行する。
【0180】
ステップS1329において、再構成部76は、規定の反復回数を行なったどうかを判断する。再構成部76は、例えば、規定の反復回数を行ったかどうかを、反復回数をインクリメントしておき、規定の反復回数(例えば、10回)を超えたか超えないかにより判断する。規定の反復回数を満たしていない場合(ステップS1329においてNo)、処理はステップS1315に復帰する。つまり、再構成部76は、上記の計算により生成された再構成データを初期データとして同一の処理を複数回反復することで再構成データを得る。規定の反復回数を満たしている場合(ステップS1329においてYes)、再構成部76は、反復法によるデータ再構成処理を終了する。
【0181】
ステップS1330において、再構成部76は、反復法による再構成データの垂直断面を切り出し垂直断面画像を生成する。
【0182】
以上のように、本実施の形態に係るX線検査装置100によれば、解析法による再構成画像および反復法による再構成画像が得られる。解析法による再構成画像を用いてボイド検査などの水平断面の検査を行ない、反復法による再構成画像を用いて濡れ検査などの垂直断面の検査を行なえばよいので、X線検査装置100が、検査にあたって準備すべき投影データの数は、解析法および反復法の一方で再構成画像を計算する場合に比べて、少なくてよい。したがって、本実施の形態に係るX線検査装置100によれば、検査時間を短縮することができる。また、X線検査装置100は、解析法の計算と反復法の計算とを並列に行なっているため、検査時間をさらに短縮することができる。
【0183】
第1の実施の形態に係るX線検査装置100によるCT撮像時間を除く検査時間を見積もる。ただし、解析法による再構成時間をTa、反復法による反復1回の再構成時間をTi、反復回数をn回、水平断面検査時間をTh、垂直断面検査時間をTvとする。
【0184】
第1の実施の形態におけるCT撮像時間を除く検査時間は、解析法の検査時間Ta+Thと、反復法の検査時間Ti*n+Tvの長い方に依存する。通常、反復法における反復1回の再構成時間は、Ti>2Taであり、Th≒Tvであるから、反復法の検査時間の方が長い。よって、第1の実施の形態のCT撮像時間を除く検査時間は、Ti*n+Tvとなる。
【0185】
また、図12には、CT撮像後にデータ再構成を行なう流れを示したが、X線検査装置100は、CT撮像と並行してデータ再構成を行なうことが好ましい。CT撮像と並行してデータ再構成すると、データ再構成時間をCT撮像時間で隠蔽することができるため、高速な検査が可能になる。
【0186】
反復法に必要な枚数の投影画像を撮像した時点で反復法の計算を開始することで、第1の実施の形態に係るX線検査装置100は、CT撮像時間も含めた全検査時間をさらに短縮することができる。
【0187】
[第2の実施の形態]
第2の実施の形態に係るX線検査装置100は、解析法による再構成を行なった後、初期データとして解析法の再構成データを使用した反復法による再構成を行なう。第1の実施の形態と異なり、X線検査装置100は、直列処理を行なう、すなわち、解析法の計算と反復法の計算とを順次行なう。しかし、反復法の初期データとして解析法の再構成データを用いるため、精度の高い画像を得るために必要な反復回数を減らすことができるため、全体としては、検査時間を短縮できる。また、再構成部76として計算を並列実行できる計算機を用いる必要がなく、本実施の形態に係る検査方法は、計算機が1台の場合にも実行することができる。
【0188】
第2の実施の形態に係るX線検査装置100の構成は、図1〜図3を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。また、X線検査の大まかな流れは、図12を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。
【0189】
第2の実施の形態に係るX線検査装置100は、第1の実施の形態とは異なるデータ再構成処理を行なう。第2の実施の形態に係るX線検査装置100の再構成部76の処理について、図14を参照して説明する。図14は、第2の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。第2の実施の形態に係る再構成部76の処理は、大きくは、次の(1)〜(3)に分けられる。
【0190】
(1)再構成部76は、まず、解析法により再構成を行なう。すなわち、再構成部76は、ステップS1401〜ステップS1413までの各処理を行ない、解析法による再構成データを生成する。ステップS1401〜ステップS1413における処理は、それぞれ、ステップS701〜ステップS713における処理と同様であるため、ここでは、説明を繰り返さない。
【0191】
(2)再構成部76は、ステップS1415において、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する。2回目以降の反復処理における初期データについては、再構成部76は、直前の再構成データを初期再構成データに設定する。つまり、2回目の反復処理の初期データは、1回目の反復処理で得られた再構成データとなり、n回目の反復処理の初期データは、(n−1)回目の反復処理で得られた再構成データとなる。
【0192】
(3)再構成部76は、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する点を除いては、第1の実施の形態と同様に、反復法の処理(ステップS1415〜ステップS1429)を実行する。ステップS1415〜ステップS1429における処理は、それぞれ、ステップS715〜ステップS729における処理と同様であるため、ここでは、説明を繰り返さない。
【0193】
第1の実施の形態に係るX線検査装置100によるCT撮像時間を除く検査時間を見積もる。ただし、解析法による再構成時間をTa、反復法による反復1回の再構成時間をTi、反復回数をn/2回、反復回数を水平断面検査時間をTh、垂直断面検査時間をTvとする。解析法による再構成データを反復法の初期データに設定しており、第1の実施の形態に比べ反復回数は少なくてよいことを鑑み、反復回数を第1の実施の形態の半分としている。
【0194】
第2の実施の形態におけるCT撮像時間を除く検査時間は、解析法の検査時間Ta+Thと、反復法の検査時間Ti*n/2+Tvを足したものとなる。よって、第2の実施の形態における検査時間は、Ta+Th+Ti*n/2+Tvとなる。
【0195】
第2の実施の形態のCT撮像時間を除く検査時間を、第1の実施の形態のCT撮像時間を除く検査時間と比較する。
【0196】
(第1の実施の形態の検査時間)−(第2の実施の形態の検査時間)=(Ti*n+Tv)−(Ta+Th+Ti*n/2+Tv)=Ti*n/2−Ta−Thである。
【0197】
ここで、一般に、通常、反復法における反復1回の再構成時間は、Ti>2Taである。さらに、再構成時間と検査時間について考えると、一般的にTa>>Thである。したがって、(第1の実施の形態の検査時間)−(第2の実施の形態の検査時間)>0、すなわち、(第2の実施の形態の検査時間)<(第1の実施の形態の検査時間)となる。
【0198】
[第3の実施の形態]
第3の実施の形態に係るX線検査装置100は、解析法による再構成を行なった後、解析法の結果に基づいて反復法で再構成する範囲を設定し、設定された範囲について反復法による再構成を行なう。解析法の計算と反復法の計算とを直列に行なう点は、第2の実施の形態と同様であるが、解析法の結果に基づいて反復法で再構成する範囲を狭めることで、反復1回の再構成時間を短縮でき、反復法の再構成時間を短縮することができる。また、再構成部76として計算を並列実行できる計算機を用いる必要がなく、本実施の形態に係る検査方法は、計算機が1台の場合にも実行することができる。
【0199】
第3の実施の形態に係るX線検査装置100の構成は、図1〜図3を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。また、X線検査の大まかな流れは、図12を参照して説明した第1の実施の形態のものと同様であり、ここではその説明を繰り返さない。
【0200】
第3の実施の形態に係るX線検査装置100は、第1の実施の形態および第2の実施の形態とは異なるデータ再構成処理を行なう。第3の実施の形態に係るX線検査装置100の再構成部76の処理について、図15を参照して説明する。図15は、第3の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。第3の実施の形態に係る再構成部76の処理は、大きくは、次の(1)〜(4)に分けられる。
【0201】
(1)再構成部76は、まず、解析法により再構成を行なう。すなわち、再構成部76は、ステップS1501〜ステップS1513までの各処理を行ない、解析法による再構成データを生成する。ステップS1501〜ステップS1513における処理は、それぞれ、ステップS701〜ステップS713における処理と同様であるため、ここでは、説明を繰り返さない。ステップS1514において、再構成部76は、解析法による再構成データから、水平断面画像を作成する。
【0202】
(2)次に、再構成部76は、ステップS1515において、水平断面画像に基づいて水平断面検査を行ない、反復法で再構成が必要な範囲を限定する。水平断面検査方法については、公知の方法を用いることができるため、ここでは、詳細な説明は行なわない。
【0203】
再構成部76は、次のような場合に、反復法による再構成が必要な範囲を限定する。
(a) ある範囲に部品がない場合
部品がない範囲は検査に必要としないため、再構成する必要がない。よって、水平断面画像に基づき、反復法を行なう前に部品があるかないかを判断することで、反復法の範囲を限定することができる。
【0204】
(b) 水平断面検査の結果、不良品であった場合
水平断面検査で不良品と判定した場合、もう一度垂直方向検査しなくても不良品と判定できる。
【0205】
(3)再構成部76は、ステップS1517において、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する。2回目以降の反復処理における初期データについては、再構成部76は、直前の再構成データを初期データに設定する。つまり、2回目の反復処理の初期データは、1回目の反復処理で得られた再構成データとなり、n回目の反復処理の初期データは、(n−1)回目の反復処理で得られた再構成データとなる。
【0206】
初期データに解析法の再構成データを用いるため、第2の実施の形態と同様、反復法の反復回数を削減することができる。
【0207】
以上では、解析法の再構成データを初期データとして用いる例について説明したが、第1の実施の形態と同様、予め定められた画像を初期データとすることもできる。この場合も、反復1回にかかる時間を短縮できるので、検査時間を短縮できる。ただし、以上の例のように、解析法の再構成データを初期データとして用いる方が、より検査時間を短縮できるのはもちろんである。
【0208】
(4)再構成部76は、解析法で再構成した画像を反復法の1回目の反復処理における初期データとして設定する点を除いては、第1の実施の形態と同様に、反復法の処理(ステップS1517〜ステップS1531)を実行する。ステップS1517〜ステップS1531における処理は、それぞれ、ステップS715〜ステップS729における処理と同様であるため、ここでは、説明を繰り返さない。ステップS1532において、再構成部76は、反復法による再構成データから垂直断面画像を作成する。
【0209】
第3の実施の形態に係るX線検査装置100によるCT撮像時間を除く検査時間を見積もる。ただし、解析法による再構成時間をTa、反復法による反復1回の再構成時間をTi、反復回数をn/2回、水平断面検査時間をTh、垂直断面検査時間をTv、反復法の再構成範囲の限定にかかる時間をTlとする。解析法による再構成データを反復法の初期画像に設定しており、第1の実施の形態に比べ反復回数は少なくてよいことを鑑み、反復回数を第1の実施の形態の半分としている。また、反復法による再構成範囲が半分に限定されたと仮定している。実装基板の半分以上の空間は再構成する必要がない空気もしくはプリント基板であり、この仮定は妥当である。
【0210】
第3の実施の形態のCT撮像時間を除く検査時間は、解析法の検査時間Ta+Thと、反復法の再構成範囲の限定にかかる時間Tlと、反復法の検査時間Ti/2*n/2+Tvを足したものとなる。よって、第3の実施の形態のCT撮像時間を除く検査時間は、Ta+Th+Tl+Ti/2*n/2+Tvとなる。
【0211】
第3の実施の形態のCT撮像時間を除く検査時間を、第2の実施の形態のCT撮像時間を除く検査時間と比較する。
【0212】
(第2の実施の形態の検査時間)−(第3の実施の形態の検査時間)=(Ta+Th+Ti*n/2+Tv)−(Ta+Th+Tl+Ti/2*n/2+Tv)=Ti*n/4−Tlである。
【0213】
ここで、再構成時間と検査時間について考えると、一般的にTi>Ta>>Th≒Tv≒Tlであるから、(第3の実施の形態の検査時間)<(第2の実施の形態の検査時間)となる。
【0214】
[第4の実施の形態]
第3の実施の形態で、解析法の再構成結果から反復法の再構成領域を限定することについて述べた。ここでは、特に、第3の実施の形態の変形例として、再構成領域の高さ方向を限定する実施の形態について説明する。
【0215】
第4の実施の形態に係るX線検査装置100の構成は、第3の実施の形態のものと同様であり、ここではその説明を繰り返さない。また、X線検査の大まかな流れは、図12を参照して説明したものと同様であり、ここではその説明を繰り返さない。
【0216】
X線検査装置100は、図3を用いて説明したように、基板の反りを計測し、高さ補正を行なうために、変位計114を備えている。ここで、基板の反りについて、図16を参照して詳しく説明しておく。図16は、部品(BGA)が実装されたプリント基板を搬送方向から見た断面図である。
【0217】
図16を参照して、プリント基板は、反っている。この反りの大きさは、プリント基板によって異なる。X線検査装置100は、複数のプリント基板に対して検査を行なうにあたっては、各検査前に変位計114を用いて基板の反り量を求め、求めた反り量に基づいて、検査したい部品の周辺に再構成範囲を限定することで、再構成時間を短縮できる。しかしながら、変位計114は、一般的に約100umの繰り返し精度しか有さない。よって、X線検査装置100は、この誤差を考慮して再構成範囲を限定する必要がある。
【0218】
一方、再構成データの1つの画素(ボクセル)サイズは数〜数十umである。そのため、繰り返し精度の誤差を考慮して、再構成範囲を設定すると、大幅に計算量が増える。例えば、バンプ直径が300umのBGAを検査することを考える。この場合、変位計114の繰り返し精度のため、余分に100×2=200um分の高さの再構成データを作成しなくてはならない。そのため、繰り返し誤差がない場合に比べ、(300+100×2)/300=1.7倍の計算時間が必要となる。
【0219】
そこで、本実施の形態に係るX線検査装置100は、高さ(Z)方向に直交する(つまり、XY平面に平行な)複数の断層における画素分布を求め、画素分布に基づいて、高さ方向に再構成範囲を限定する。
【0220】
図17は、本実施の形態における、解析法の視野(データの再構成範囲)と、反復法の視野との関係を示す図である。図17を参照して、解析法の視野は、基板の反りがあっても、検査対象(ここでは基板1601、部品1603、BGA1604)が視野に含まれる程度に、検査対象の高さ方向のサイズに比べて大きく設定される。一方、反復法の視野は、検査対象のBGA1604を含む必要最小限の領域に設定される。
【0221】
解析法による再構成3次元データの断層画像の一例を図18に示す。図18に示すように、解析法による再構成画像は、斜めCT撮像の影響により、高さ方向にのびたものになる。しかしながら、解析法による再構成データから半田ボールの存在する位置を推測することは可能である。
【0222】
本実施の形態では、X線検査装置100の再構成部76は、解析法による再構成データに基づいて、次のように半田ボールの存在する位置を推測し、反復法で再構成を行なう領域を設定する。
【0223】
まず、再構成部76は、解析法による再構成データの複数の水平断面画像について、画素値の分散Vzを求める。つまり、再構成部76は、各水平断面画像内の全ての画素値の平均を求め、平均と画素値の差の2乗の和を求める。
【0224】
次に、再構成部76は、分散Vzが最大となる位置Zmidを算出する。再構成部76は、求めた分散Vzを全て比較し、最も大きな値を選択する。そして、再構成部76は、最も大きな分散Vzを持つ画像の高さをZmidとする。
【0225】
分散Vzが最大となる位置(Zmid)は、部品の中心付近と考えられる。検査対象である基板においては、部品はX線が吸収される上、同一の高さに密集しているという特徴がある。その特徴から、部品の存在する高さの水平断層画像では輝度値のばらつきが大きくなり、分散が大きくなると考えられるためである。そこで、再構成部76は、Zmidを起点として、部品の上端位置と下端位置とを探し、視野の高さ範囲を求める。
【0226】
再構成部76は、Zmidより低いZ位置で、分散Vzが閾値Vthよりも小さい位置Zlowを算出する。再構成部76は、ZmidからZが小さくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZlowとする。ここで、Vthは、ユーザが予め設定しておくものとする。
【0227】
同様に、再構成部76は、Zmidより高いZ位置で、分散Vzが閾値Vthよりも小さい位置Zhighを算出する。再構成部76は、ZmidからZが大きくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZhighとする。
【0228】
そして、再構成部76は、反復法で再構成を行なう領域(視野)の高さ範囲をZlowからZhighに設定する。
【0229】
この設定方法について、図19を参照して説明する。図19は、図18に示した解析法による再構成データの断層画像の画素値の分散を示す図である。横軸は、断層画像のZ位置を示す。縦軸は、分散Vzを示す。
【0230】
図19を参照して、分散Vzは、半田ボールに対応するピークを持つ。再構成部76は、この位置を、Zmidとして求める。また、分散Vzは、Zmidが遠ざかるにつれ、次第に減少する。ここでは、Vthを2000に設定している。再構成部76は、Vz=2000となるZを、Zhigh、Zlowとして求める。
【0231】
このように求めたZmid、Zhigh、Zlowを図18にも示している。この図では、物体は、Zhigh、Zlowを超えて存在するように見える。しかし、斜めCT撮像では、物体が高さ方向に間延びするため、再構成する視野は求めた高さ範囲で十分である。
【0232】
第4の実施の形態に係るX線検査装置100の再構成部76の処理について、図20を参照して説明する。図20は、第4の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【0233】
ステップS2001において、再構成部76は、解析法による3Dデータの再構成および水平断面画像の作成を実施する。具体的には、再構成部76は、図15に示したステップS1501からステップS1514までの処理を実行する。これらの処理については、すでに説明しているので、その詳細は繰り返さない。
【0234】
ステップS2003において、再構成部76は、1つの高さ位置(Z位置)について水平断面画像における画素値の分散Vzを求める。
【0235】
ステップS2005において、再構成部76は、全てのZ位置について分散Vzを求めたかどうか判断する。
【0236】
すべてのZ位置について分散Vzを求めていないと判断した場合(ステップS2005においてNO)、再構成部76は、Z位置を変えて、ステップS2003の処理を再度行なう。
【0237】
すべてのZ位置について分散Vzを求めたと判断した場合(ステップS2005においてYES)、再構成部76は、ステップS2007において、分散Vzが最大となる位置Zmidを算出する。
【0238】
ステップS2009において、再構成部76は、ZmidからZが小さくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZlowとして求める。
【0239】
ステップS2011において、再構成部76は、ZmidからZが大きくなる方向に順に、分散VzとVthを比較し、VthよりもVzが小さくなる最初の高さをZhighとする。
【0240】
ステップS2013において、再構成部76は、反復法の視野の範囲をZlowからZhighに設定する。
【0241】
ステップS2015において、再構成部76は、反復法による3Dデータの再構成および垂直断面画像の作成を行なう。具体的には、再構成部76は、図15に示したステップS1517からステップS1532までの処理を実行する。これらの処理については、すでに説明しているので、その詳細は繰り返さない。
【0242】
以上の処理により、本実施の形態に係るX線検査装置100によれば、反復法の視野を高さ方向について必要最低限に設定することができる。したがって、反復法の再構成時間を短縮できる。例えば、バンプ直径が300umのBGAの検査の場合、反復法の計算時間を1.7倍高速化できる。
【0243】
上では、分散が最大となる高さをはんだボール中心の高さと仮定したが、Zmidを求める方法としては他にも下記の方法が考えられる。
【0244】
(1) はんだボールの直径
再構成部76は、断面画像において、はんだボールに対応するはんだ領域(2値化したときの、白または値が1の領域)の直径が最大となる高さを、Zmidとしてもよい。これは、はんだボールが球形をしており、中心付近の直径が最大となる性質を利用したものである。
【0245】
(2) はんだボールの面積
再構成部76は、はんだ領域の面積が最大となる高さを、Zmidとしてもよい。この設定方法は、はんだボールの直径をZmidに設定する方法と同様の考え方に基づいている。しかしながら、この方法では、はんだボールの断層が正円でないことによる誤認識を回避することができる。また、この方法には、面積は長さの2乗になるため、長さで比較するよりもノイズの影響を受けにくいという利点がある。
【0246】
また、上では、分散に閾値を設けて視野高さを決めるZlowおよびZhighを算出していたが、ZlowおよびZhighを決定する方法としては、他にも下記の方法が考えられる。
【0247】
(1) 既定の高さ範囲の利用
ボールのサイズが予め分かっていれば、実装されたはんだがどの程度の厚みになるかは容易に予想がつく。そこで、再構成部76は、はんだボールの中心の高さを求めたら、中心の高さから予め設定しておいた一定の高さの範囲にある領域を、反復法の視野として設定してもよい。この方法によれば、基板の反りにより、基板の高さが変わったとしても、基板の高さに追従して、一定の高さの視野のデータを反復法で再構成できる。
【0248】
(2) 最大値からの割合を利用
再構成部76は、はんだボール中心を求めるのに利用した値(分散、面積等)の最大値に所定の割合をかけた値を閾値とすることも可能である。例えば、再構成部76は、ボール中心の高さの分散の20%の分散を示す位置をZlow、Zhighにするように設定する。この方法によれば、X線検査装置100は、ノイズによる分散の変化があっても、基板高さを正確に求めることができる。
【0249】
[その他]
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0250】
【図1】本発明に係るX線検査装置100の概略ブロック図である。
【図2】走査型X線源10の構成を示す断面図である。
【図3】第1の実施の形態のX線検査装置100の構成を説明するための図である。
【図4】データ再構成手法を説明するための図である。
【図5】図4に示した検査対象物における視野FOV、視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。
【図6】フィルタ補正逆投影法の処理手順を示すフローチャートである。
【図7】走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。
【図8】図7の概念図を上面から見た上面図である。
【図9】反復的手法の処理を説明するためのフローチャートである。
【図10】解析法および反復法の特性について説明するための図である。
【図11】解析法および反復法のそれぞれで得られる再構成画像の具体例を示す図である。
【図12】X線検査装置100によるX線検査の概略をフローチャート形式で示した図である。
【図13】第1の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図14】第2の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図15】第3の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図16】部品(BGA)が実装されたプリント基板を搬送方向から見た断面図である。
【図17】第4の実施の形態における、解析法の視野(データの再構成範囲)と、反復法の視野との関係を示す図である。
【図18】解析法による再構成3次元データの断層画像の一例を示す図である。
【図19】解析法による再構成データの断層画像の画素値の分散を示す図である。
【図20】第4の実施の形態に係る再構成部76の処理をフローチャート形式で示した図である。
【図21】PCBの検査について説明するための図である。
【図22】特許文献1に記載の検査装置を模式的に示す図である。
【図23】X線源およびX線検出器を移動させてプリント基板を検査する検査装置の模式図である。
【符号の説明】
【0251】
10 走査型X線源、11 ターゲット、12 偏向ヨーク、13 電子線収束コイル、14 高圧電源、15 真空ポンプ、16,16a,16b 電子ビーム、17,17a,17b X線焦点位置、18,18a,18b X線、19 電子銃、20 検査対象、21 軸、22 X線検出器駆動部、22.1、ロボットアーム、22.2 検出器支持部、23 X線検出器、30 画像取得制御機構、32 検出器駆動制御部、34 画像データ取得部、40 入力部、50 出力部、60 X線源制御機構、62 電子ビーム制御部、70 演算部、72 X線源制御部、74 画像取得制御部、76 再構成部、78 良否判定部、80 検査対象位置制御部、82 X線焦点位置計算部、84 撮像条件設定部、90 メモリ、92 X線焦点位置情報、94 撮像条件情報、96 プログラム、98 画像データ、100 X線検査装置、110 検査対象位置駆動機構、1601 基板、1602 第1の部品、1603 第2の部品、1604 BGA、1605 表面層、1606 加熱後の状態、1607 ボイド、1608 ブリッジ。
【特許請求の範囲】
【請求項1】
X線を用いて対象物を検査するX線検査装置であって、
前記X線が前記対象物に複数の方向から入射するように前記X線を出力するX線出力手段と、
各前記方向から前記対象物に入射して前記対象物を透過した前記X線が届く位置において前記X線を撮像するX線検出手段と、
各前記位置で撮像した前記X線の強度分布データに基づき、対象物の複数の再構成画像データを生成する再構成手段とを備え、
前記再構成手段は、
第1の方向を法線方向とする面に対応する第1の再構成画像データを生成する第1の再構成手段を含み、
前記第1の再構成手段は、前記第1の再構成画像データの生成処理において、解析法を用い、
前記第1の方向とは異なる第2の方向を法線方向とする面に対応する前記対象物の第2の再構成画像データを生成する第2の再構成手段をさらに含み、
前記第2の再構成手段は、前記第2の再構成画像データの生成処理において、反復法を用いる、X線検査装置。
【請求項2】
前記再構成手段は、前記第1の再構成画像データの生成および前記第2の再構成画像データの生成を並行して行なう、請求項1に記載のX線検査装置。
【請求項3】
前記第2の構成手段は、前記第1の再構成画像データを反復法の初期画像として前記第2の再構成画像データを生成する、請求項1または2に記載のX線検査装置。
【請求項4】
前記再構成手段は、前記解析法による再構成3次元データに基づいて、前記第2の再構成手段が前記第2の再構成画像データを生成する領域を決定する決定手段をさらに含み、
前記第2の再構成手段は、決定された前記領域について、前記第2の再構成画像データを生成する、請求項1または3に記載のX線検査装置。
【請求項5】
前記X線出力手段は、前記X線が前記第2の方向を除く方向から前記対象物に入射するように前記X線を出力する、請求項1から4のいずれか1項に記載のX線検査装置。
【請求項6】
前記対象物を法線方向が実質的に前記第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、
前記X線出力手段は、前記搬送面の第1の側から前記X線を出力し、
前記X線検出手段は、前記搬送面の前記第1の側とは異なる第2の側で前記X線を撮像する、請求項1から5のいずれか1項に記載のX線検査装置。
【請求項7】
前記対象物は、平面状の物体であり、
前記第2の方向は、実質的に、前記対象物の面の法線方向であり、
前記X線出力手段は、前記対象物の面に所定の角度で交わる方向から前記X線が前記対象物に入射するように前記X線を出力する、請求項1から6のいずれか1項に記載のX線検査装置。
【請求項8】
前記対象物は、平面状の物体であり、
前記第2の方向は、実質的に、前記対象物の面の法線方向であり、
前記決定手段は、前記解析法による再構成3次元データの前記対象物の面に実質的に平行な複数の断面の画素分布に基づいて、前記第2の再構成画像データを生成する領域を前記第2の方向について限定する、請求項4に記載のX線検査装置。
【請求項9】
前記対象物を法線方向が実質的に前記第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、
前記搬送機構は、前記対象物を挟むレールを含む、請求項8に記載のX線検査装置。
【請求項10】
X線を用いて対象物を検査するX線検査方法であって、
前記X線が前記対象物に複数の方向から入射するように前記X線を出力するステップと、
各前記方向から前記対象物に入射して前記対象物を透過した前記X線が届く位置において前記X線を撮像するステップと、
各前記位置で撮像した前記X線の強度分布データに基づき、対象物の複数の再構成画像データを生成するステップとを備え、
前記再構成画像データを生成するステップは、第1の方向を法線方向とする面に対応する第1の再構成画像データを生成するステップを含み、
前記第1の再構成画像データを生成するステップは、前記第1の再構成画像データの生成処理において、解析法を用いるステップを有し、
前記再構成画像データを生成するステップは、前記第1の方向とは異なる第2の方向を法線方向とする面に対応する前記対象物の第2の再構成画像データを生成するステップをさらに含み、
前記第2の再構成画像データを生成するステップは、前記第2の再構成画像データの生成処理において、反復法を用いるステップを有する、X線検査方法。
【請求項1】
X線を用いて対象物を検査するX線検査装置であって、
前記X線が前記対象物に複数の方向から入射するように前記X線を出力するX線出力手段と、
各前記方向から前記対象物に入射して前記対象物を透過した前記X線が届く位置において前記X線を撮像するX線検出手段と、
各前記位置で撮像した前記X線の強度分布データに基づき、対象物の複数の再構成画像データを生成する再構成手段とを備え、
前記再構成手段は、
第1の方向を法線方向とする面に対応する第1の再構成画像データを生成する第1の再構成手段を含み、
前記第1の再構成手段は、前記第1の再構成画像データの生成処理において、解析法を用い、
前記第1の方向とは異なる第2の方向を法線方向とする面に対応する前記対象物の第2の再構成画像データを生成する第2の再構成手段をさらに含み、
前記第2の再構成手段は、前記第2の再構成画像データの生成処理において、反復法を用いる、X線検査装置。
【請求項2】
前記再構成手段は、前記第1の再構成画像データの生成および前記第2の再構成画像データの生成を並行して行なう、請求項1に記載のX線検査装置。
【請求項3】
前記第2の構成手段は、前記第1の再構成画像データを反復法の初期画像として前記第2の再構成画像データを生成する、請求項1または2に記載のX線検査装置。
【請求項4】
前記再構成手段は、前記解析法による再構成3次元データに基づいて、前記第2の再構成手段が前記第2の再構成画像データを生成する領域を決定する決定手段をさらに含み、
前記第2の再構成手段は、決定された前記領域について、前記第2の再構成画像データを生成する、請求項1または3に記載のX線検査装置。
【請求項5】
前記X線出力手段は、前記X線が前記第2の方向を除く方向から前記対象物に入射するように前記X線を出力する、請求項1から4のいずれか1項に記載のX線検査装置。
【請求項6】
前記対象物を法線方向が実質的に前記第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、
前記X線出力手段は、前記搬送面の第1の側から前記X線を出力し、
前記X線検出手段は、前記搬送面の前記第1の側とは異なる第2の側で前記X線を撮像する、請求項1から5のいずれか1項に記載のX線検査装置。
【請求項7】
前記対象物は、平面状の物体であり、
前記第2の方向は、実質的に、前記対象物の面の法線方向であり、
前記X線出力手段は、前記対象物の面に所定の角度で交わる方向から前記X線が前記対象物に入射するように前記X線を出力する、請求項1から6のいずれか1項に記載のX線検査装置。
【請求項8】
前記対象物は、平面状の物体であり、
前記第2の方向は、実質的に、前記対象物の面の法線方向であり、
前記決定手段は、前記解析法による再構成3次元データの前記対象物の面に実質的に平行な複数の断面の画素分布に基づいて、前記第2の再構成画像データを生成する領域を前記第2の方向について限定する、請求項4に記載のX線検査装置。
【請求項9】
前記対象物を法線方向が実質的に前記第2の方向である搬送面に沿って搬送する搬送機構をさらに備え、
前記搬送機構は、前記対象物を挟むレールを含む、請求項8に記載のX線検査装置。
【請求項10】
X線を用いて対象物を検査するX線検査方法であって、
前記X線が前記対象物に複数の方向から入射するように前記X線を出力するステップと、
各前記方向から前記対象物に入射して前記対象物を透過した前記X線が届く位置において前記X線を撮像するステップと、
各前記位置で撮像した前記X線の強度分布データに基づき、対象物の複数の再構成画像データを生成するステップとを備え、
前記再構成画像データを生成するステップは、第1の方向を法線方向とする面に対応する第1の再構成画像データを生成するステップを含み、
前記第1の再構成画像データを生成するステップは、前記第1の再構成画像データの生成処理において、解析法を用いるステップを有し、
前記再構成画像データを生成するステップは、前記第1の方向とは異なる第2の方向を法線方向とする面に対応する前記対象物の第2の再構成画像データを生成するステップをさらに含み、
前記第2の再構成画像データを生成するステップは、前記第2の再構成画像データの生成処理において、反復法を用いるステップを有する、X線検査方法。
【図1】

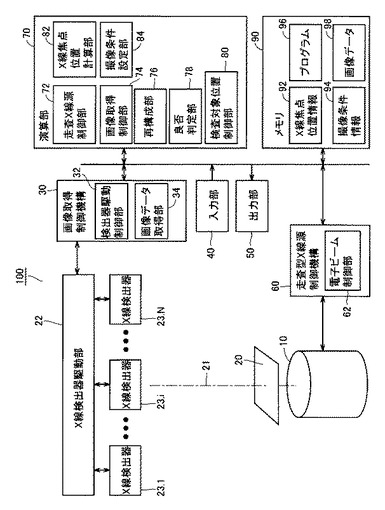
【図3】
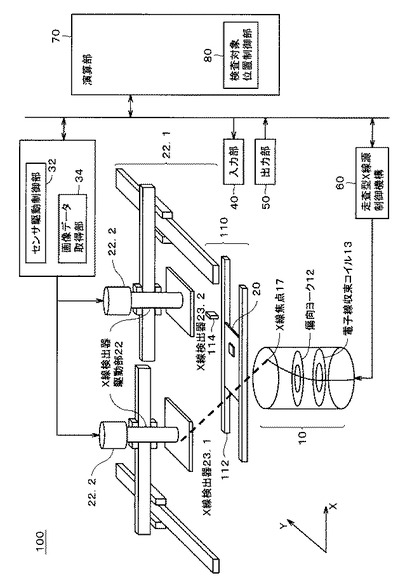
【図4】
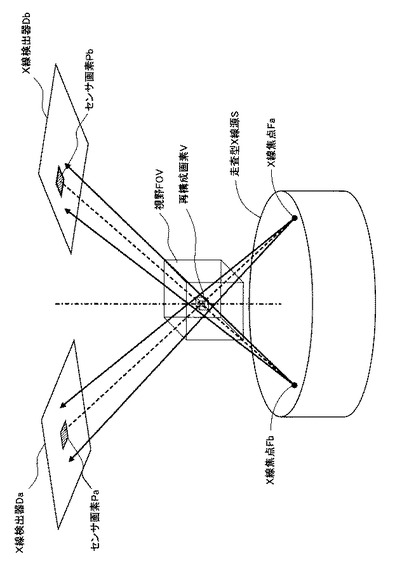
【図5】
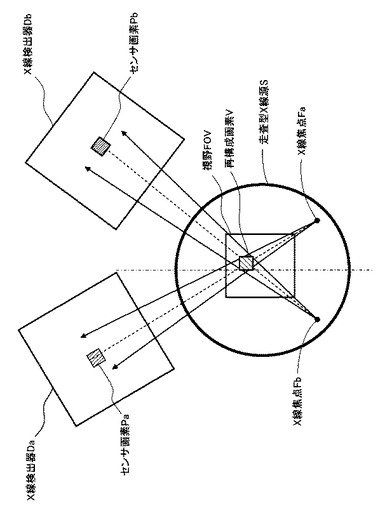
【図6】
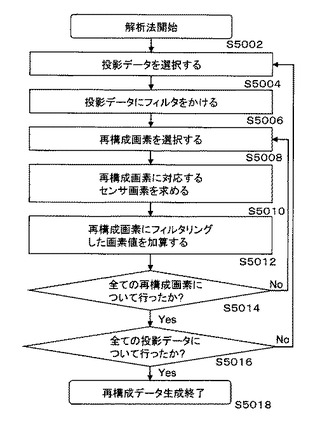
【図7】
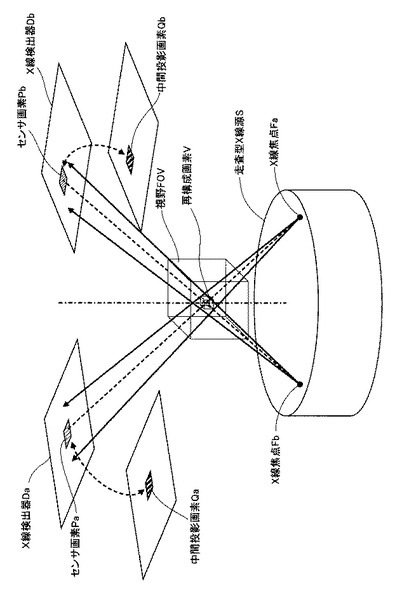
【図8】
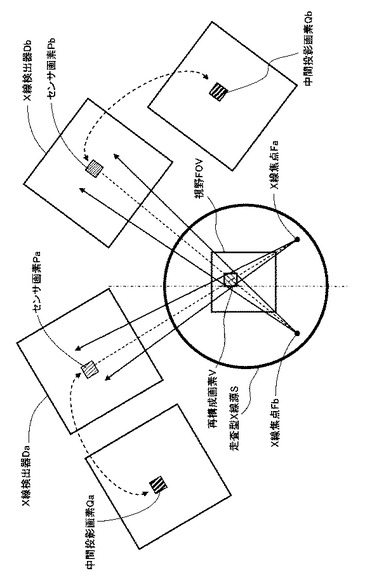
【図9】
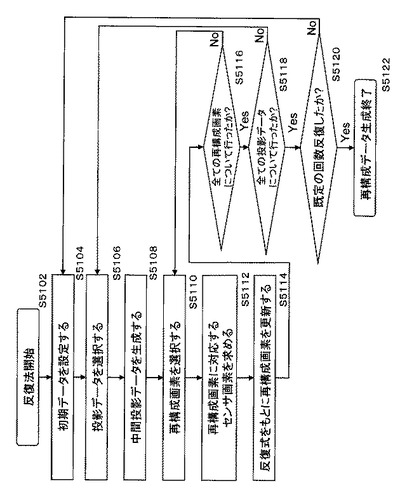
【図10】
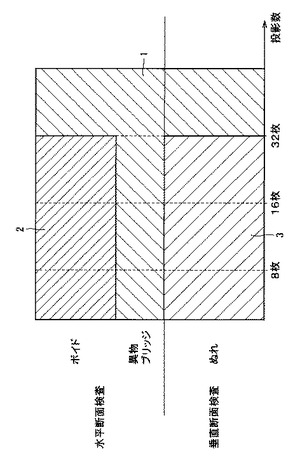
【図12】
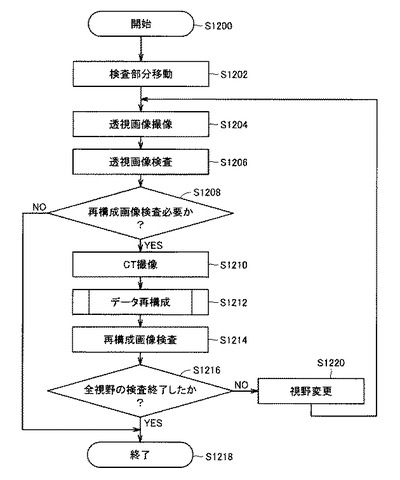
【図13】
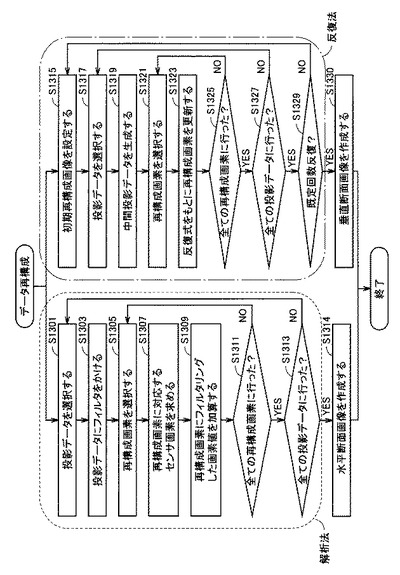
【図14】
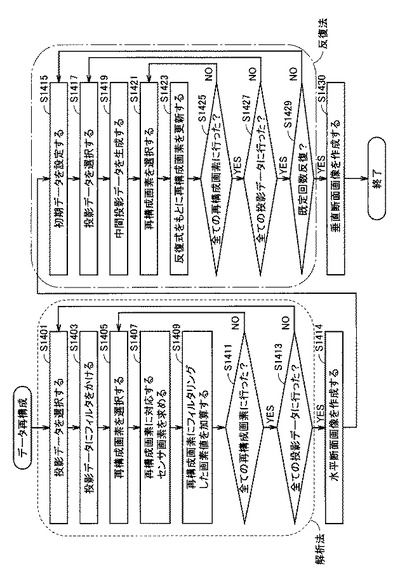
【図15】
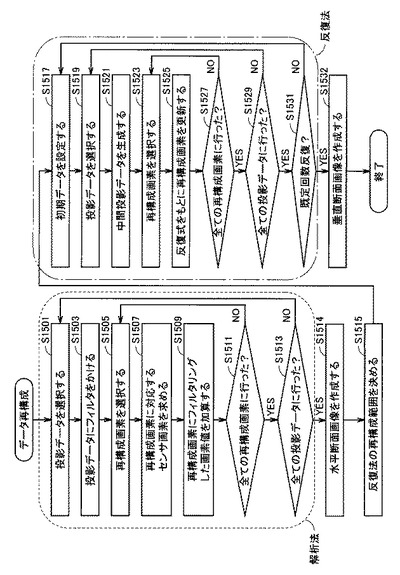
【図16】
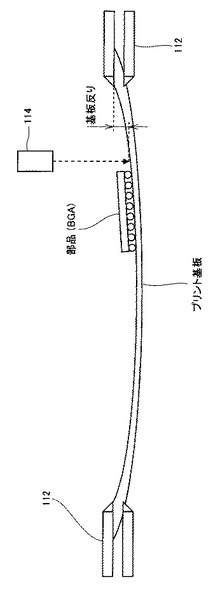
【図17】
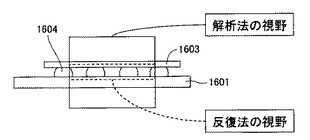
【図19】
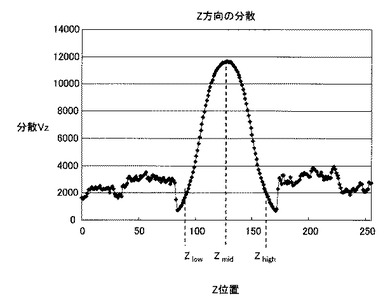
【図20】
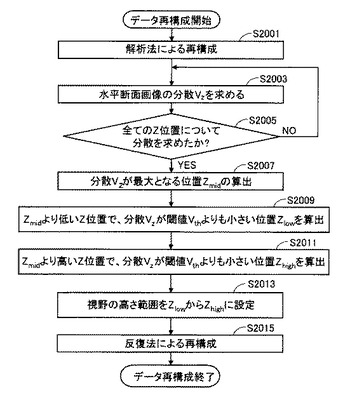
【図21】
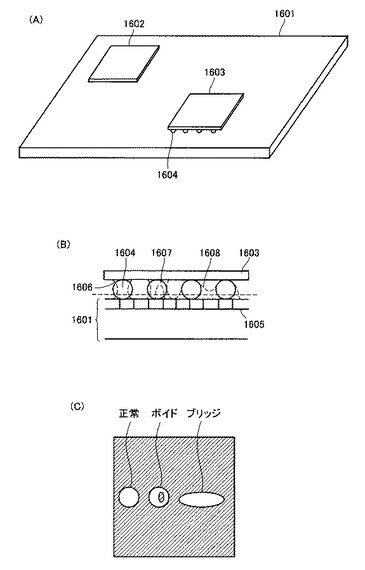
【図22】
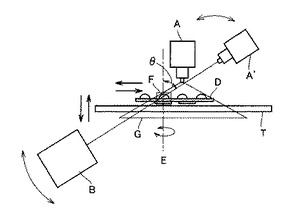
【図23】
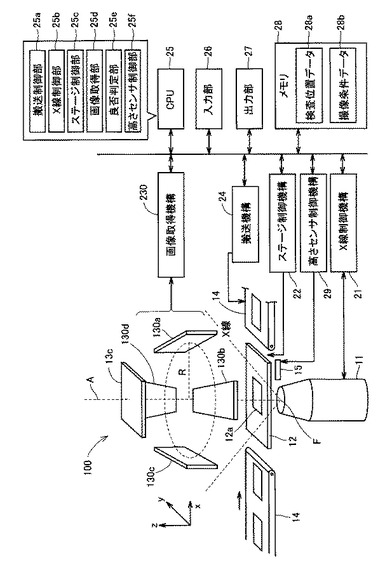
【図2】
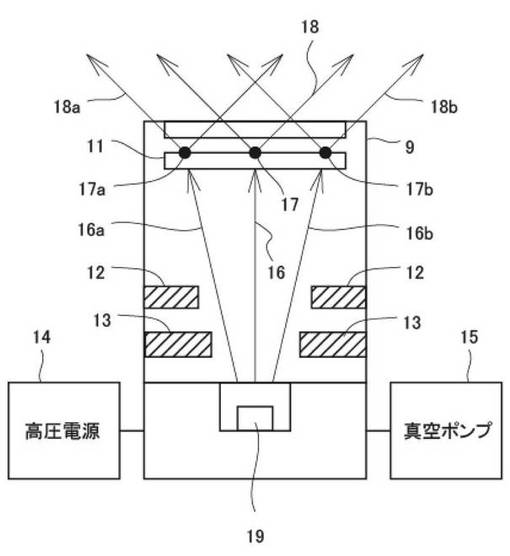
【図11】
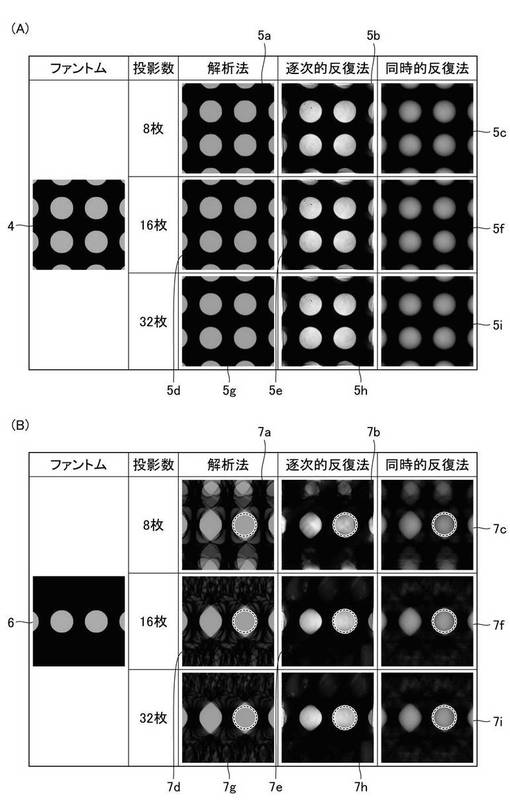
【図18】
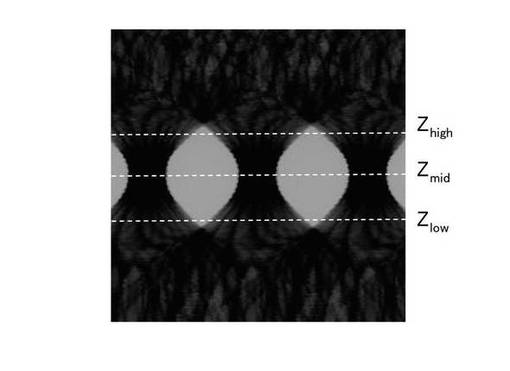
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図11】
【図18】
【公開番号】特開2010−127810(P2010−127810A)
【公開日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願番号】特願2008−303906(P2008−303906)
【出願日】平成20年11月28日(2008.11.28)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願日】平成20年11月28日(2008.11.28)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]