
X線検査装置およびX線検査方法
【課題】X線検出器を移動する機構を簡素化し、X線検査を高速化する。
【解決手段】一実施の形態に従うX線検査装置は、X線を用いて撮像するためのX線検出器23.1と、X線検出器を移動するためのX線検出器駆動部22と、検査対象領域を透過したX線が、X線検出器に入射するようにX線を出力するX線源10と、X線検査装置の動作を制御する演算部70と、X線検出器23.1による複数の撮像のための各位置が同一平面に存在し、かつ、各位置におけるX線検出器の向きが一定となるように、X線検出器駆動部22を制御するセンサ駆動制御部とを含む。
【解決手段】一実施の形態に従うX線検査装置は、X線を用いて撮像するためのX線検出器23.1と、X線検出器を移動するためのX線検出器駆動部22と、検査対象領域を透過したX線が、X線検出器に入射するようにX線を出力するX線源10と、X線検査装置の動作を制御する演算部70と、X線検出器23.1による複数の撮像のための各位置が同一平面に存在し、かつ、各位置におけるX線検出器の向きが一定となるように、X線検出器駆動部22を制御するセンサ駆動制御部とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、X線検査方法およびX線検査装置に関する。特に、X線照射を用いて対象物を検査するための撮影方法であって、X線検査方法、X線検査装置に適用しうる技術に関する。
【背景技術】
【0002】
近年、サブミクロンの微細加工技術によりLSI(Large-Scale Integration)の高集積化が進み、従来複数のパッケージに分かれていた機能をひとつのLSIに積め込むことができるようになった。従来のQFP(Quad Flat Package)やPGA(Pin Grid Array)では、ワンパッケージに必要な機能を組み込むことによるピン数の増加に対応できなくなったため、最近では、特に、BGA(Ball Grid Array)やCSP(Chip Size Package)パッケージのLSIが使用される。また、携帯電話機などの超小型化が必要なものでは、ピン数がそれほど必要なくてもBGAパッケージが使用されている。
【0003】
LSIのBGAやCSPパッケージは超小型化には大いに貢献する反面、半田部分等がアセンブリ後には外観からは目に見えないという特徴がある。そこで、BGAやCSPパッケージを実装したプリント基板等を検査する際は、検査対象品にX線を照射して得られた透視画像を分析することで、品質の良否判定が行なわれてきた。
【0004】
たとえば、特許文献1では、透過X線を検出するのにX線平面検出器を用いることで、鮮明なX線画像を得ることができるX線断層面検査装置が開示されている。
【0005】
また、特許文献2では、X線の照射角度を任意に選択して傾斜三次元X線CT(Computed Tomography)における画像の再構成を行なうための方法が開示されている。
【0006】
また、特許文献3では、平行X線検出装置で取得したX線画像に基づいて二次元的な検査を実施し、傾斜X線検出手段にて取得したX線画像に基づいて三次元的な検査を行なうことで、双方の検査を高速に行なうことができるX線検査装置が開示されている。ここでは、複数のX線画像に基づいて検査対象品の3次元画像を再構成する技術についても言及がある。再構成の手法としては、たとえば、「フィルタ補正逆投影法」が挙げられている。
【0007】
また、特許文献4では、X線断層撮影装置において、断層撮影を行なうためにX線源に、直線軌道、円軌道、渦巻軌道で動かす際に、1個のモータで駆動可能な機構が開示されている。ただし、X線源を移動させることになるため、X線源の重量が大きいことと、1個のモータにより駆動する設計となっており高速な移動は困難である。さらに、1個の撮像系において、回転・直線・渦巻移動の3種類の移動モードを実現するために、複雑な機構を有しており移動速度の向上には多くの機構の改良が必要なため、メカの高速化は困難である。
【0008】
さらに、一般の産業用X線透視装置においては、検査対象が微小な場合、できるだけ拡大されたX線透視像が得られることが望ましい。そのためには、X線の発生領域である焦点の大きさが極めて小さくなければならない。そこで、焦点寸法が数μmという透過型X線源であるマイクロフォーカスX線源が使用される。透視像の画質の向上のためにこのようなマイクロフォーカスX線源において、X線を発生させる電子ビーム電流(X線源電流)を大きくすると、ターゲットの電子衝突部(焦点)の発熱によりターゲットが局部的に溶融してしまうために、許容される限界値(許容負荷)が設定されることが一般的である。特許文献5には、このような許容負荷を増大させるために、陽極(ターゲット)が回転する円板であるマイクロフォーカスX線源が開示されている。
【0009】
一方、特許文献6には、X線源の寿命をのばすことと等を目的として、偏向用電磁コイルを用いて、間欠的に電子ビームをデフォーカスすることにより、パルス状のX線を発生することが可能なパルスX線源が開示されている。
【0010】
[X線CTの画像再構成手法]
上述したように、X線CTでは、対象物を透過した後、X線検出器で検出された観測値をもとに、少なくとも対象物の断面画像を再構成する。なお、対象物または対象物の一部について3次元的なX線の吸収率の分布が得られるので、結果的には、対象物または対象物の一部の任意の断面画像、すなわちX線検出器の受光面と交わる面についての画像を再構成することが可能である。このような再構成手法としては、「解析的手法」と「反復的手法」とが知られている。以下、そのような画像再構成手法について、簡単にまとめる。
【0011】
(X線の投影データの説明)
図57は、画像再構成手法を説明するための図である。X線画像再構成は、検査対象物の外部から照射したX線が、検査対象物によってどれだけ吸収(減衰)されたかを複数の角度から計測することにより、検査対象物内部のX線吸収係数の分布を求める手法である。
【0012】
なお、以下では、X線源としては、いわゆる走査型X線源を用いて測定が行なわれるものとして説明を行なう。
【0013】
図57を参照して、X線検出器Daに対応するX線焦点Faから発せられたX線は検査対象(図示していない)を透過してX線検出器Daの画素Paに到達する。X線が検査対象を透過することによって、X線量(X線強度)は検査対象を構成する部品等のそれぞれが有する固有のX線吸収係数に相当する分だけ減衰する。X線強度の減衰量は検出器画素Paの画素値として記録される。
【0014】
X線焦点Faから発せられるX線強度をIとし、X線焦点Faから検出器画素PaまでのX線が通過した経路をtとし、検査対象におけるX線吸収係数分布をf(x,y,z)とすると、検出器画素Paに到達したX線の強度Iaは以下の式(1)で表される。
【0015】
【数1】

【0016】
この式の両辺の対数をとると、経路tに沿ったX線吸収係数分布が以下の式(2)のように線積分値により表わされる。このX線吸収係数分布をX線検出器により計測した値を投影データと呼ぶ。すなわちX線検出器はX線減衰量分布(X線強度分布と置き換えてもよい)を検出する。
【0017】
【数2】
【0018】
(解析的手法(たとえば、FBP法:Filtered Back-Projection法:フィルタ補正逆投影法)の説明)
図57に示すように、解析的手法を用いるにあたっては、1つの検査対象物(あるいは検査対象物の1つの部分)に対して、X線検出器Daの配置とは異なる位置に配置されたX線検出器Dbに対して、焦点Fbから発せられて到達したX線強度Ibについての投影データを検出する。このような投影データを、実際には、1つの検査対象物(あるいは検査対象物の1つの部分)に対して、複数の配置について検出することで、これらの投影データから検査対象物の断面画像を再構成することになる。
【0019】
図58は、図57に示した検査対象物における視野FOV、視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。再構成画素Vの部分を透過したX線は、X線検出器Da、Db上に像を結ぶにあたり、(焦点から再構成画素Vまでの距離)対(焦点からX線検出器までの距離)の比に応じて拡大された像を結ぶことになる。
【0020】
Feldkampらは、この式(2)をもとに3次元画像再構成を行なうための再構成アルゴリズムを提案した。このアルゴリズム(いわゆるFeldkamp法)は非特許文献1に示されているように、公知技術であるのでここでは詳細に説明しない。以下では一般的な手法の一つであるフィルタ補正逆投影法について簡単に説明する。
【0021】
投影データから、X線が通過した経路tに沿って投影データを加算してX線吸収係数分布f(x,y,z)を求める操作を逆投影と呼ぶ。ただし、単純に投影データを加算すると撮像系の点広がり関数によりボケが生じるため、投影データにフィルタをかける。このフィルタにはたとえばShepp−Loganフィルタ等の高周波強調フィルタが用いられる。フィルタをかける方向は、X線の透過経路の方向に対し垂直方向が望ましいとされているが、Feldkamp法では投影データの透過経路の方向が全て同一と近似しフィルタリングを行っており、検査可能な画像を再構成することができる。
【0022】
以下に、本実施形態における画像再構成の手順を示す。まず、X線検出器Daの検出器画素Paの投影データpaをフィルタリングした値pa′を再構成画素Vの画素値vに加算する。さらに、X線検出器Dbの検出器画素Pbの投影データpbをフィルタリングした値pb′を再構成画素Vの画素値vに加算する。すると、v=pa′+pb′となる。この逆投影操作を全てのX線検出器もしくは一部のX線検出器に対して行なうことで、最終的な再構成画素Vの画素値vは以下の式(3)に従って表わされる。
【0023】
【数3】
【0024】
この操作を再構成領域(視野)FOV内の全ての再構成画素Vに対して行なうことにより、検査対象のX線吸収係数分布が求められて再構成画像データが得られる。
【0025】
図59は、このようなフィルタ補正逆投影法の処理手順を示すフローチャートである。
図59を参照して、解析的手法での処理が開始されると(S5002)、まず、複数撮像した投影データのうちから処理対象となる投影データの選択が行なわれる(S5004)。次に、選択された投影データにフィルタをかける処理を行う(S5006)。
【0026】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択し(S5008)、再構成画素Vに対応する検出器画素を求める(S5010)。
【0027】
続いて、再構成画素Vにフィルタリングした画素値を加算し(S5012)、全ての再構成画素について加算を行ったかが判断される(S5014)。全ての再構成画素について処理が終わっていなければ、処理はステップS5008に復帰し、終了していれば、処理は、ステップS5016に移行する。
【0028】
ステップS5016では、全ての投影データについて処理を行ったかが判断される。全ての投影データについて終了していなければ、処理はステップS5004に復帰する。一方、全ての投影データについて終了していれば、再構成画像生成が終了する(S5018)。
【0029】
(反復的手法(SART)の説明)
反復的手法では、検査対象のX線吸収係数分布f(x,y,z)と投影データln(I/Ia)とを方程式と見なし再構成する手法である。
【0030】
図60は、走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。一方、図61は、図60の概念図を上面から見た上面図である。
【0031】
以下に、図60および図61を参照して、反復的手法で再構成する手順について説明する。再構成画像の画素値を一列に並べたベクトルν(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν」と記す)と、投影データを一列に並べたベクトルp(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「p」と記す)を以下の式(4)および式(5)で表現する。
【0032】
以下では、たとえば、再構成画素Vの値をある値に仮定したときにX線焦点FaからのX線がX線検出器Da上に結ばれると計算される画像についての画素を中間投影画素Qaとし、実際にX線検出器Da上で観測された画素を検出器画素Paと呼ぶ。X線検出器Dbについても、それぞれ、中間投影画素Qb、検出器画素Pbと呼ぶ。
【0033】
反復的手法では、仮定された再構成画素ベクトルνとこれに対応する中間投影データベクトルqに対して、以下に説明するように、中間投影データベクトルqが、実際に測定された検出器画素値PaまたはPbを投影データと一致するとみなせるまで、仮定されたベクトルνを更新する反復演算により解νを求める。
【0034】
【数4】
【0035】
ただし、Jは再構成領域(視野)内の画素数、Iは投影データの画素数である。また、Tは転置を示す。νとpを関係付ける投影演算を以下の式(6)のI×J係数行列で表す。
【0036】
【数5】
【0037】
この時、反復的手法での画像再構成は、以下の式(7)線形方程式を解いてνを求める問題として定式化できる。
【0038】
【数6】
【0039】
つまり、vjがpiに対する寄与をwijとする。なお、Wは再構成画像の画素値νが投影データの画素値pに対してどの程度寄与するかを表しており、X線焦点とX線検出器の幾何学的位置から求めることができ、検出確率もしくは重みと呼ばれることもある。
【0040】
反復的手法には、方程式を代数的に解く手法や統計的な雑音を考慮した手法等が考案されているが、以下に一般的に用いられている代数的手法であるSART(Simultaneous Algebraic Reconstruction Technique)について説明する。詳細は、非特許文献2に記載されている。
【0041】
SARTでは、最初に、以下の式(8)で表される初期再構成画像ν0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν0」と記す)を仮定する。
【0042】
【数7】
【0043】
初期再構成画像ν0は全て0のデータでもよいし、CAD(Computer Aided Design)データ等から取得したデータを仮定してもよい。
【0044】
次に、投影演算Wを用いて以下の式(9)で表される中間投影データq0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「q0」と記す)を生成する。
【0045】
【数8】
【0046】
中間投影データq0の生成は、1つの投影データに対し行ってもよいし、複数の投影データに対し行ってもよい。以下は1つの投影データに対し行ったものとして説明する。
【0047】
生成した中間投影データq0とX線検出器から取得された投影データpを比較する。比較方法は差をとる方法と除する方法があるが、SARTでは差(p−q0)をとる。
【0048】
初期再構成画像ν0を更新する。更新に用いる式(反復式)は式(10)のようになる。
【0049】
【数9】
【0050】
なお、式(10)中の以下の式(11)および式(12)は、予め計算しておくことで更新の計算時間を短縮することができる。
【0051】
【数10】
【0052】
上記の計算により生成された再構成画像 を初期画像として代入し、同一の処理を複数
回反復させることで再構成画像データが得られる。
【0053】
図62は、反復的手法の処理を説明するためのフローチャートである。
図62を参照して、まず、反復的手法による処理が開始されると(S5102)、続いて、初期再構成画像の設定が行なわれる(S5104)。上述のとおり、初期再構成画像としては、たとえば、全てが0の値でもよい。次に、複数のX線検出器位置に対応する複数の投影データのうちから処理対象となる投影データを選択する(S5106)。
【0054】
中間投影データを生成する。中間投影データの生成方法は上述したとおりである。(S5108)。
【0055】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択する(S5110)。
再構成画素に対応する検出器画素を求める(S5112)。
【0056】
反復式をもとに、再構成画素Vの値を更新する(S5114)。
次に、全ての再構成画素について更新を行ったかが判断され(S5116)、全ての再構成画素について処理が終わっていなければ、処理はステップS5110に復帰し、終了していれば、処理は、ステップS5118に移行する。
【0057】
ステップS5118では、全ての投影データについて処理を行ったかが判断される。全ての投影データについて終了していなければ、処理はステップS5106に復帰する。一方、全ての投影データについて終了していれば、処理はステップS5120に移行する。
【0058】
ステップS5120では、規定の反復回数だけ処理を行ったかが判断され、反復していなれば、処理はステップS5104に復帰して現在の再構成画素値を初期再構成画像として採用して処理を繰り返し、処理を規定回数だけ反復していれば、再構成画像生成が終了する(S5022)。
【0059】
以上のようにX線検出器により取得された投影データから、検査対象物の3次元画像を再構成できる。
【0060】
ただし、解析的手法では、フィルタリング処理をX線検出器の各画素に対して行う場合の計算の容易さ等の理由から、複数の投影データの各々を取得するために、X線検出器および焦点と対象物との相対位置を変更した場合でも、X線の焦点とX線検出器との相対的な配置は、一定の関係を維持することが望ましい。言い換えると、焦点からX線検出器を見たときには、見通される立体角内の対象物の視野に含まれる部分の角度・対象物内の位置等は変化しても、焦点とX線検出器との位置関係は、一定のままであることが望ましい。しかも、上記のような逆投影法を行なうにあたっては、アーチファクト等の低減のためには、複数の投影データは、対象物の視野に含まれる部分について、等角度ごとに取得されることが望ましい。
【0061】
これに対して、反復的手法では、このようなX線の焦点とX線検出器との相対的な配置に、このような制限はない。
【先行技術文献】
【特許文献】
【0062】
【特許文献1】特開2000−46760号公報
【特許文献2】特開2003−344316号公報
【特許文献3】特開2006−162335号公報
【特許文献4】特公平5−86218号公報
【特許文献5】特開2001−273860号公報
【特許文献6】特開2005−347174号公報
【非特許文献】
【0063】
【非特許文献1】L.A.Feldkamp,L.C.Davis and J.W.Kress,“Practical cone−beam algorithm”,Jounrnal of the Optical Society oFamerica.A, 612−619(1984)
【非特許文献2】A.H.Anderson and A.C.Kak,“SIMULTANEOUS ALGEBRAIC RECONSTRUCTIONTECHNIQUE(SART):A SUPERIOR IMPLEMENTATION OF THE ART ALGOITHM”,ULTRASONIC IMAGING 6, 81−94(1984)
【発明の概要】
【発明が解決しようとする課題】
【0064】
しかしながら、工場のインラインでの検査では、製品の全数検査を行なうことが必要となるために、製造効率の観点からは、X線検査に要する時間を短縮することが必要となる。
【0065】
また、上述した従来のX線検査に関するX線撮影技術では、再構成できる検査エリアの面積を大きくすると、撮像および3D化(再構成)演算に時間を要する。たとえば、上述したようなプリント基板等を検査するためには、その検査対象の全体ではなく、複数の特定の部分の画像を得られればよい場合が多い。このような場合において、検査対象について検査をしたい部分が飛び地状に配置されているときに、その全体を包含する面積(または体積)を検査対象としうるX線検出機を用意するのは、装置の大型化や演算負荷の増加等の観点から効率的でない。
【0066】
さらに、上述した従来のX線検査に関するX線撮影技術では、検査エリアを変更させるのに撮像系あるいは検査対象ワークを動かす必要があり、可動部分が増える。このことは、上述したX線検査に要する時間の問題だけでなく、駆動部分を製造するためのコストや、保守性、信頼性にも関係する。たとえば、上述したようなプリント基板等を検査する際には、検査の対象となる部分は、ステージに置かれているプリント基板の一部である場合が多い。しかも、このような場合、得られるX線像を拡大像とするために、X線検出器は、検査対象から比較的離れた位置を駆動されることになるものの、検査対象となる部分は、微小部分であるために、極めて高精度に撮像系の駆動を制御する必要が生じる。このため、撮像系の駆動機構については、できる限り少ない自由度で、必要な画像の撮像が行なえなければならない。
【0067】
本発明は、上記のような問題を解決するためになされたものであって、その目的は、検査対象物の所定の検査エリアを選択的に高速に検査することができるX線検査装置およびこのようなX線撮影方法を利用したX線検査方法を提供することである。
【0068】
この発明の他の目的は、可動部分を削減して、低コストで、保守性や信頼性に優れたX線検査装置およびこのようなX線撮影方法を利用したX線検査方法を提供することである。
【0069】
この発明のさらに他の目的は、検査対象物を移動させることなく、高速に検査対象物の複数の部分を検査することが可能なX線検査装置およびこのようなX線撮影方法を利用したX線検査方法を提供することである。
【課題を解決するための手段】
【0070】
本発明の1つの局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査装置であって、複数の検出面で撮像するための複数のX線検出器と、各X線検出器を独立に移動させる検出器駆動手段と、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するように対応させてX線を出力するX線出力手段と、X線検査装置の動作の制御を行う制御手段とを備え、制御手段は、各X線検出器の露光タイミングと、検出器駆動手段とを制御する画像取得制御手段と、X線出力手段を制御するためのX線出力制御手段と、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成する画像再構成処理手段とを含み、画像取得制御手段およびX線出力制御手段は、複数のX線検出器のうちの一部を複数の撮像位置のうちの第1の位置で露光させる処理と、一部とは異なる他の一部を複数の撮像位置のうちの第2の位置に移動させる処理とを並行して実行する。
【0071】
好ましくは、画像取得制御手段およびX線出力制御手段は、1つの対象物の検査対象領域について、画像データの再構成に対して予め設定された個数の撮像位置での撮像を複数回に分けて行うために、複数のX線検出器のうちの一部について第1の位置のうち今回撮像する撮像位置で露光させる処理および2回後の撮像に対応する撮像位置へ移動させる処理と、複数のX線検出器のうちの他の一部について第2の位置のうち次回の撮像に対応する撮像位置へ移動させる処理および次回の撮像位置で露光させる処理とを並行して交互に実行させる。
【0072】
好ましくは、検出器駆動手段は、複数のX線検出器を所定の1軸方向に沿って独立に移動させる1軸駆動手段を含む。
【0073】
好ましくは、1軸駆動手段は、複数のX線検出器を所定の平面内で平行に移動させる。
好ましくは、X線出力制御手段は、複数の検出面について、X線が検査対象領域を透過して各検出面に対して入射するようにX線の放射の起点位置の各々を設定する起点設定手段を含み、X線出力手段は、各起点位置にX線源のX線焦点位置を移動させて、X線を発生させる。
【0074】
好ましくは、X線出力手段は、撮像位置に配置されている複数のX線検出器のうち同時に露光状態となっている複数のX線検出器に対して、それぞれ対応する複数のX線焦点位置からX線を発生させ、X線出力手段からのX線が、同時に露光状態となっているX線検出器のそれぞれに対して、対応するX線焦点位置から検査対象領域を透過して各検出面に対して入射するX線は透過する一方、対応しないX線焦点位置からのX線は遮蔽する遮蔽部材とをさらに備える。
【0075】
好ましくは、X線出力手段は、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、X線出力制御手段は、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線出力手段を制御する。
【0076】
好ましくは、検出器駆動手段は、複数のX線検出器を所定の平面内で平行に移動させる平行駆動手段を含む。
【0077】
好ましくは、検出器駆動手段は、複数のX線検出器を所定の2軸方向に沿ってそれぞれ独立移動させる2軸駆動手段を含む。
【0078】
好ましくは、複数のX線検出器の検出面はそれぞれ矩形形状であり、検出器駆動手段は、複数のX線検出器の検出面の一方端が、各撮像位置においてX線出力手段に向かう方向と交わるように、複数のX線検出器を自転させる自転手段を含む。
【0079】
好ましくは、画像再構成処理手は、反復的手法により検査対象領域の画像データを再構成する。
【0080】
好ましくは、画像再構成処理手段は、解析的手法により検査対象領域の画像データを再構成する。
【0081】
この発明の他の局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査装置であって、複数の検出面で撮像するための複数のX線検出器と、各X線検出器を所定の1軸方向に沿って移動させる検出器駆動手段と、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するように対応させてX線を出力するX線出力手段と、X線検査装置の動作の制御を行う制御手段とを備え、制御手段は、各X線検出器の露光タイミングと、検出器駆動手段とを制御する画像取得制御手段と、X線出力手段を制御するためのX線出力制御手段と、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成する画像再構成処理手段とを含む。
【0082】
好ましくは、1軸駆動手段は、複数のX線検出器を所定の平面内で平行に移動させる。
好ましくは、X線出力制御手段は、複数の検出面について、X線が検査対象領域を透過して各検出面に対して入射するようにX線の放射の起点位置の各々を設定する起点設定手段を含み、X線出力手段は、各起点位置にX線源のX線焦点位置を移動させて、X線を発生させる。
【0083】
好ましくは、X線出力手段は、撮像位置に配置されている複数のX線検出器のうち同時に露光状態となっている複数のX線検出器に対して、それぞれ対応する複数のX線焦点位置からX線を発生させ、X線出力手段からのX線が、同時に露光状態となっているX線検出器のそれぞれに対して、対応するX線焦点位置から検査対象領域を透過して各検出面に対して入射するX線は透過する一方、対応しないX線焦点位置からのX線は遮蔽する遮蔽部材とをさらに備える。
【0084】
好ましくは、X線出力手段は、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、X線出力制御手段は、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線出力手段を制御する。
【0085】
好ましくは、画像再構成処理手段は、反復的手法により検査対象領域の画像データを再構成する。
【0086】
この発明のさらに他の局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面にそれぞれ対応するX線検出器で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査方法であって、各X線検出器を対応する撮像位置に独立に移動させるステップと、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するようにX線を出力するステップと、複数のX線検出器のうちの一部を複数の撮像位置のうちの第1の位置で露光させる処理と、一部とは異なる他の一部を複数の撮像位置のうちの第2の位置に移動させる処理とを並行して実行するステップと、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成するステップとを備える。
【0087】
好ましくは、並行して実行するステップは、1つの対象物の検査対象領域について、画像データの再構成に対して予め設定された個数の撮像位置での撮像を複数回に分けて行うために、複数のX線検出器のうちの一部について第1の位置のうち今回の撮像位置で露光させる処理および2回後の撮像に対応する撮像位置へ移動させる処理と、複数のX線検出器のうちの他の一部について第2の位置のうち次回の撮像に対応する撮像位置へ移動させる処理および次回の撮像位置で露光させる処理とを並行して交互に実行させるステップを含む。
【0088】
好ましくは、X線を出力するステップは、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線を出力するステップを含む。
【0089】
この発明のさらに他の局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面にそれぞれ対応するX線検出器で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査方法であって、各X線検出器を所定の1軸方向に沿って対応する撮像位置に移動させるステップと、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するようにX線を出力するステップと、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成するステップとを備える。
【0090】
好ましくは、1つの対象物の検査対象領域について、画像データの再構成に対して予め設定された個数の撮像位置での撮像を複数回に分けて行うために、複数のX線検出器のうちの一部について今回の撮像位置で露光させる処理および2回後の撮像に対応する撮像位置へ移動させる処理と、複数のX線検出器のうちの他の一部について次回の撮像に対応する撮像位置へ移動させる処理および次回の撮像位置で露光させる処理とを並行して交互に実行させるステップをさらに備える。
【0091】
好ましくは、X線を出力するステップは、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線を出力するステップを含む。
【発明の効果】
【0092】
本発明に係るX線検査方法およびX線検査装置によれば、検査対象物の所定の検査エリアを選択的に高速に検査することができる。
【0093】
または、本発明に係るX線検査方法およびX線検査装置によれば、可動部分を削減して、低コストで、保守性や信頼性に優れたX線検査を実行することが可能である。
【0094】
または、本発明に係るX線検査方法およびX線検査装置によれば、高速に検査対象物の複数の部分を検査することが可能である。
【図面の簡単な説明】
【0095】
【図1】本発明に係るX線検査装置100の概略ブロック図である。
【図2】走査型X線源10の構成を示す断面図である。
【図3】第1の移動機構の例を示す概念図である。
【図4】第2の移動機構の例を示す概念図である。
【図5】第3の移動機構の例を示す概念図である。
【図6】図3〜図5のいずれかの移動機構を再構成画像検査のための検査全体のフローチャートである。
【図7】図6で説明したフローチャートに従う検査全体のタイミングチャートである。
【図8】図6で説明した1視野のCT撮像の処理を示すフローチャートである。
【図9】図8で説明した1視野のCT撮像の処理において、複数方向で撮像を行なう処理のタイミングチャートである。
【図10】実施の形態1のX線検査装置100の構成を説明するための図である。
【図11】図10に示したX線検査装置100の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図12】実施の形態1のX線検査装置100による再構成画像検査のための検査全体のフローチャートである。
【図13】図12に説明したステップS310の1視野のCT撮像のフローチャートである。
【図14】図13に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図15】実施の形態1の変形例のX線検査装置102の構成を説明する図である。
【図16】図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図17】図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図である。
【図18】図16または図17のように、X線検出器23を移動させて検査する際の検査のフローチャートである。
【図19】図18に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図20】実施の形態2のX線検査装置104の構成を説明する図である。
【図21】遮蔽体66の上面図である。
【図22】図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図23】図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図である。
【図24】図22または図23のように、X線検出器23を移動させて検査する際の検査のフローチャートを示す図である。
【図25】図24に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図26】解析的手法を用いて、画像再構成を行なうために、1つの視野についてのCT撮像により検査領域とできる領域を説明するための概念図である。
【図27】視野(検査対象)が回転する従来の撮像系のタイミングチャートである。
【図28】1視野のCT撮像時間について説明する図である。
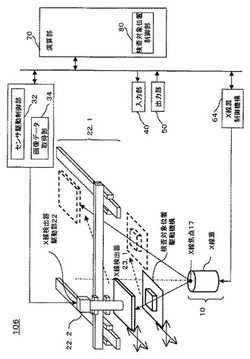
【図29】実施の形態3のX線検査装置106の構成を説明する図である。
【図30】図29に示したX線検査装置106の構成において、X線検出器23と検査対象の視野との移動軌跡を上面図である。
【図31】平行移動検出器を用いた撮像系のCT撮像フローチャートである。
【図32】平行移動X線検出器を用いた撮像系の検査領域を示す概念図である。
【図33】平行移動X線検出器を用いた撮像系のタイミングチャートである。
【図34】4つの検出器と走査型X線源を使用した撮像を行なうX線検査装置の構成を示す図である。
【図35】図34に示すX線検査装置900のCT撮像フローチャートである。
【図36】図35に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図37】実施の形態4のX線検査装置110の構成を説明するためのブロック図である。
【図38】X線検出器23として使用される検出器の構成を示す概念図である。
【図39】図37に示したX線検査装置110の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図40】図37に示したX線検査装置110の構成による1視野撮像のフローチャートである。
【図41】4つのX線検出器23.1〜23.4を使用した際の走査型X線源動作を説明するためのタイミングチャートである。
【図42】図37で示したX線検査装置110での1視野撮像のタイミングチャートである。
【図43】走査型X線源の構造を示す概念図である。
【図44】実施の形態5のX線検査装置120の構成を説明するためのブロック図である。
【図45】平行移動X線検出器を用いた撮像系の動作例を示す図である。
【図46】図44および図45で説明した撮像系の1視野についての検査の処理のフローチャートである。
【図47】図44および図45で説明した撮像系の1視野についての検査タイミングチャートである。
【図48】図44および図45で説明した撮像系の検査全体についての検査タイミングチャートである。
【図49】実施の形態5の変形例のX線検査装置122の構成を説明する図である。
【図50】X線検査装置122の平行移動X線検出器を用いた撮像系の動作例を示す図である。
【図51】図49および図50で説明した直線移動検出器を用いた撮像系の1視野についての検査の処理のフローチャートである。
【図52】図49および図50で説明した撮像系の1視野についての検査タイミングチャートである。
【図53】実施の形態6のX線検査装置130の構成を説明する図である。
【図54】図53に示したX線検査装置130の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図55】図53および図54で説明した直線移動検出器を用いた撮像系の検査の処理のフローチャートである。
【図56】図53および図54で説明した撮像系による1視野についての撮像の検査タイミングチャートである。
【図57】画像再構成手法を説明するための図である。
【図58】視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。
【図59】フィルタ補正逆投影法の処理手順を示すフローチャートである。
【図60】走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。
【図61】図60の概念図を上面から見た上面図である。
【図62】反復的手法の処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0096】
以下、図面を参照しつつ本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについては詳細な説明は繰り返さない。
【0097】
[実施の形態1]
(1.本発明の構成)
図1は、本発明に係るX線検査装置100の概略ブロック図である。
【0098】
図1を参照して、本発明に係るX線検査装置100について説明する。ただし、以下で記載されている構成、寸法、形状、その他の相対配置などは、特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
【0099】
X線検査装置100は、中心軸を軸21としてX線を出力する走査型X線源10と、複数のX線検出器23.1〜23.Nが取り付けられ、後に説明するように、各X線検出器23.1〜23.Nを指定された位置に駆動するためのX線検出器駆動部22とを備える。また、走査型X線源10とX線検出器23.1〜23.Nとの間には検査対象20が配置される。さらに、X線検査装置100は、X線検出器駆動部22による各X線検出器23.1〜23.Nの駆動やX線検出器23.1〜23.Nからの画像データの取得を制御するための画像取得制御機構30と、ユーザからの指示入力等を受け付けるための入力部40と、測定結果等を外部に出力するための出力部50とを備える。また、X線検査装置100は、走査X線源制御機構60と、演算部70と、メモリ90とをさらに備える。このような構成において、演算部70は、メモリ90に格納された図示しないプログラムを実行して各部を制御し、また、所定の演算処理を実施する。
【0100】
走査型X線源10は、走査X線源制御機構60によって制御され、検査対象20に対しX線を照射する。
【0101】
図2は、走査型X線源10の構成を示す断面図である。
図2を参照して、走査型X線源10においては、電子ビーム制御部62によって制御された電子銃19から、タングステンなどのターゲット11に対し電子ビーム16が照射される。そして、電子ビーム16がターゲットに衝突した場所(X線焦点位置17)からX線18が発生し、放射(出力)される。なお、電子ビーム系は、真空容器9の中に収められている。真空容器9の内部は、真空ポンプ15によって真空に保たれており、電子銃19から高圧電源14によって加速された電子ビーム16が発射される。
【0102】
走査型X線源10においては、電子ビーム16は、電子線収束コイル13により収束された後、偏向ヨーク12によって電子ビーム16を偏向することにより、電子ビーム16がターゲット11に衝突する場所を任意に変更することができる。たとえば、偏向ヨーク12によって偏向された電子ビーム16aはターゲット11に衝突し、X線焦点位置17aからX線18aが出力される。また、同様に、偏向ヨーク12によって偏向された電子ビーム16bはターゲット11に衝突し、X線焦点位置17bからX線18bが出力される。なお、特に断らない場合は、本願発明において、走査型X線源10は透過型である。また、後に説明するように、検査対象物の検査対象部分に応じて設定されるX線の放射の起点となるべき位置(以下、「X線の放射の起点位置」と呼ぶ)からX線を発生させるにあたり、その位置の設定の自由度を高めることができるよう、リング状ではなく、連続面のターゲットであることが望ましい。また、以下の説明では、特に位置を区別して記載しない場合は、総称として、単にX線焦点位置17と示す。
【0103】
なお、X線焦点位置を、上述したX線の放射の各起点位置に移動させるには、たとえば、X線源自体の位置を、その都度、機械的に移動させることも可能である。ただし、図2に示すような構成であれば、X線焦点位置を、X線の放射の起点位置に移動させるにあたり、一定の範囲内であれば、X線源を機械的に移動させることを必要とせず、保守性や信頼性に優れたX線検査装置を実現できる。なお、後に説明するように、X線源を複数個設けておき、起点位置に応じて、切り替えて使用することも可能である。
【0104】
言い換えると、「X線の放射の起点位置」とは、撮像に使用するX線検出器23.i(iは、1〜Nのうちの特定された1つ)の空間的な位置と、検査対象20の検査対象部の空間的な位置とが特定されれば、特定されうる空間的な位置のことを意味し、X線焦点位置とは、実際にX線が出力されるターゲット上の位置を意味する。したがって、「X線の放射の起点位置」にX線焦点位置をもってくるためには、走査型X線源による電子ビームの走査によることも可能であるし、あるいは、X線源そのものを機械的に移動させてもよい。
【0105】
図1に戻って、走査X線源制御機構60は、電子ビームの出力を制御する電子ビーム制御部62を含む。電子ビーム制御部62は、演算部70から、X線焦点位置、X線エネルギー(管電圧、管電流)の指定をうける。X線エネルギーは、検査対象の構成によって異なる。
【0106】
検査対象20は、走査型X線源10とX線検出器23(以下、「X線検出器23.1〜23.N」を総称するときは、「X線検出器23」と呼ぶ)との間に配置される。検査対象20の位置の移動にあたっては、X−Y−Zステージで任意の位置に移動するようにしてもよいし、ベルトコンベアのように一方向に移動することにより検査のための位置に配置するようにしてもよい。なお、検査対象がプリント実装基板のように小さい場合、上述のように、走査型X線源10とX線検出器23とは固定で検査対象を移動させることとしてもよいものの、ガラス基板など検査対象が大面積で、検査対象側を任意に移動させることが困難な場合は、走査型X線源10とX線検出器23との相対的な位置は固定したまま、走査型X線源10およびX線検出器23を移動させてもよい。
【0107】
X線検出器23は、走査型X線源10から出力され、検査対象20を透過したX線を検出して画像化する2次元X線検出器である。たとえば、CCD(Charge Coupled Device)カメラ、I.I.(Image Intensifier)管などである。本願発明では、X線検出器駆動部22に複数のX線検出器を配置することから、スペース効率のよいFPD(フラットパネルディテクタ)が望ましい。また、インライン検査で使うことができるように高感度であることが望ましく、CdTeを使った直接変換方式のFPDであることが特に望ましい。
【0108】
X線検出器駆動部22の構成の詳細については、後述する。
画像取得制御機構30は、演算部70より指定された位置にX線検出器23を移動させるようにX線検出器駆動部22を制御するための検出器駆動制御部32と、演算部70から指定されたX線検出器23の画像データを取得するための画像データ取得部34とを含む。なお、演算部70から画像データを取得するものとして同時に指定されるX線検出器は、後に説明するように撮像の状況により、1個の場合と複数とがありうる。
【0109】
X線検出器駆動部22により駆動されたX線検出器23の位置は位置センサ(図示しない)によって知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0110】
また、X線検出器駆動部22は、拡大率を調整するために上下に昇降できることが望ましい。この場合、X線検出器駆動部22の上下方向の位置をセンサ(図示しない)により知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0111】
入力部40は、ユーザの入力を受け付けるための操作入力機器である。
出力部50は、演算部70で構成されたX線画像等を表示するためのディスプレイである。
【0112】
すなわち、ユーザは、入力部40を介して様々な入力を実行することができ、演算部70の処理によって得られる種々の演算結果が出力部50に表示される。出力部50に表示される画像は、ユーザによる目視の良否判定のために出力されてもよいし、あるいは、後で説明する良否判定部78の良否判定結果として出力されてもよい。
【0113】
演算部70は、走査X線源制御部72と、画像取得制御部74と、3D画像再構成部76と、良否判定部78と、検査対象位置制御部80と、X線焦点位置計算部82と、撮像条件設定部84とを含む。
【0114】
走査X線源制御部72は、X線焦点位置、X線エネルギーを決定し、走査X線源制御機構60に指令を送る。
【0115】
画像取得制御部74は、X線検出器駆動部22により指定位置まで駆動されるX線検出器23のうち、画像を取得するX線検出器23を決定し、画像取得制御機構30に指令を送る。また、画像取得制御機構30から、画像データを取得する。
【0116】
3D画像再構成部76は、画像取得制御部74により取得された複数の画像データから3次元データを再構成する。
【0117】
良否判定部78は、3D画像再構成部76により再構成された3Dの画像データあるいは、透視データをもとに検査対象の良否を判定する。たとえば、半田ボールの形状を認識し、当該形状が予め定められた許容範囲内であるか否かを判定する等により良否判定を行なう。なお、良否判定を行なうアルゴリズム、あるいは、アルゴリズムへの入力情報は、検査対象によって異なるため撮像条件情報94から入手する。
【0118】
検査対称位置制御部80は、検査対象20を移動させる機構(図示しない)、たとえば、ステージを制御する。
【0119】
X線焦点位置計算部82は、検査対象物20のある検査エリアを検査する際に、その検査エリアに対するX線焦点位置や照射角などを計算する。なお、詳細は後述する。
【0120】
撮像条件設定部84は、検査対象20に応じて、走査型X線源10からX線を出力する際の条件を設定する。たとえば、X線源に対する印加電圧、撮像時間等である。
【0121】
メモリ90は、X線焦点位置計算部82によって計算されたX線焦点位置が格納されるX線焦点位置情報92と、撮像条件設定部84によって設定された撮像条件や、良否判定を行なうアルゴリズムに関する情報などが格納される撮像条件情報94の他、上述した演算部70が実行する各機能を実現するためのプログラムとを含む。なお、メモリ90は、データを蓄積することができればよく、RAM(Random Access Memory)やEEPROM(Electrically Erasable and Programmable Read-Only Memory)やHDD(Hard Disc Drive)等の記憶装置により構成される。
【0122】
(X線検出器駆動部22の構成1:検出器独立移動のための構成)
X線検査装置100においては、(X線検出器数)<<(再構成に必要な撮像枚数)である。これは、通常は、FPDに要するコストの観点から、必要な撮像枚数分の検出器を一度に設けるのが現実的ではないからである。したがって、X線検出器数をこえる撮像を行う時点で、(X線検出器)/(X線源(X線源))/(検査対象をのせたステージ)を機械的に移動させる必要があり、このような機械的な移動中は撮像処理を行うことができない。
【0123】
以下に説明するように実施の形態1に係るX線検査装置100は、システム全体の高速化に寄与しないこの空き時間の削減を可能とする。
【0124】
(機械的な移動による撮像処理時間のロスの問題点)
以下では、実施の形態1に係るX線検査装置100の構成および動作を説明する前提として、他のX線検査装置として想定可能な構成において、撮像系または検査対象の機械的な移動を可能とする移動機構部分の構成の概略とその問題点について、説明しておく。
【0125】
図3は、第1の移動機構の例を示す概念図である。図3においては、X線源(X線源)とX線検出器が固定で、視野が機械的に移動(回転)することで、再構成に必要な複数の撮像枚数を得る。
【0126】
図4は、第2の移動機構の例を示す概念図である。図4においては、X線検出器を機械的にX−Y面内で平行移動し、かつθ方向に回転するとともに、視野(検査対象の検査部分)もX−Y面内で平行移動することで再構成に必要な複数の撮像枚数を得る。
【0127】
図5は、第3の移動機構の例を示す概念図である。図5においては、X線検出器を機械的にθ方向に回転するとともに、視野(検査対象の検査部分)もX−Y面内で平行移動することで再構成に必要な複数の撮像枚数を得る。
【0128】
以下に詳しく説明するように、上記図3〜図5のいずれの場合も複数の撮像データを得るためには、撮像系または検査対象の機械的な移動が発生し、この移動中は撮像を行うことができないため、この移動時間がシステムの高速化を妨げる。
【0129】
図6は、図3〜図5のいずれかの移動機構を再構成画像検査のための検査全体のフローチャートを示す図である。
【0130】
図6を参照して、まず、処理が開始されると(S100)、検査対象の検査部分(視野)を撮像可能な位置に移動する(S102)。すなわち、透視画像の撮像するために、検査対象をのせたステージとX線検出器を所定の位置に移動する。
【0131】
その上で、透視画像の撮像を行い(S104)、透視画像を検査して、取得した透視画像から検査対象の視野(透視画像で撮像されている範囲)の良否判定を行う(S106)。
【0132】
続いて、再構成画像による検査が必要か否かを判断する(S108)。
再構成画像による検査が必要ない場合には、検査は終了する(S118)。
【0133】
一方、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行う(S110)。CT撮像においては、検査対象内の視野(再構成領域もしくは、上記の透視画像撮像範囲と同様の領域)を複数の方向から撮像する。
【0134】
次に、複数方向の撮像画像から再構成画像を生成する(S112)。続けて、再構成画像による良否判定を行う(S114)。
【0135】
さらに、全視野の検査を終了したか否かが判断され(S116)、終了していない場合は、処理は、ステップS102に復帰する。一方で、全視野について検査が終了していれば、本検査は終了する(S118)。
【0136】
図7は、図6で説明したフローチャートに従う検査全体のタイミングチャートである。
以下の説明では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は以下に示す。
【0137】
このとき、検査対象全体を撮像する時間をTiとし、1つの視野を撮像する時間をTvとし、機械的な移動(ステージ・X線検出器等の移動)に要する時間をTmとし、撮像(X線検出器の露光)時間をTsとする。
【0138】
図7に示すように、検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回の機械的な移動時間Te(視野の移動時間)の合計であるから、以下の式(13)で表される。
【0139】
Ti = MTv + (M−1)Te …(13)
図8は、図6で説明した1視野のCT撮像の処理を示すフローチャートである。
【0140】
図8を参照して、1視野のCT撮像が開始されると(S200)、まず、撮像系および/または検査対象を現在の視野についての撮像位置に移動する(S202)。撮像位置は、CADデータ等の設計情報から自動的に算出することができる。検査対象はステージに乗っているため、ステージの移動または回転とともに視野を移動することが可能である。
【0141】
次に、検査対象の視野部分を撮像する(S204)。検査対象の撮像データは、X線源からX線を照射し、X線検出器を露光することで得られる。露光時間は、検査対象のサイズや、X線源の発生するX線の強度から予め決めておくことが可能である。
【0142】
続いて、X線検出器で撮像した画像データを演算部に転送する(S206)。すなわち、撮像画像データを再構成するために、再構成処理を行う演算部に転送する。
【0143】
さらに、続いて、規定枚数撮像したかが判断される(S208)。規定枚数は検査をする前にCADデータ等の設計情報から決めてもよいし、作業者が目視により判断してもよい。規定枚数に達した場合は、CT撮像を終了し(S210)、画像再構成処理(図6のS112)を行う。一方、規定枚数に達していない場合は、処理はステップS202に復帰して、次の撮像位置から視野を撮像するために、再び、撮像系および/または検査対象を移動する。
【0144】
図9は、図8で説明した1視野のCT撮像の処理において、複数方向で撮像を行なう処理のタイミングチャートである。
【0145】
ここでは、たとえば、図5に示すような構成において、1つの円回転機構に取り付けられたX線検出器がS個存在し、これが検出器回転機構により一体的に回転するものとする。ただし、1回の撮像では、1つのX線検出器ごとに撮像が行なわれるものとする。
【0146】
このとき、図9に示すように、X線検出器による1視野のCT撮像時間Tvは、N回の撮像時間Ts(図中、S1,S2,…,SNで示す)と、必要な機械的な移動時間の合計であるから、たとえば、以下の式(14)で表される。
【0147】
検出器がS枚の場合 : Tv = NTs+(N/S-1)Tm
検出器が1枚の場合 : Tv = NTs+(N-1)Tm …(14)
なお、この時、撮像画像のデータ転送は機械的な移動と同時に行うとした。たとえば、1つの検出器を用いて16枚撮像したい場合は、Tv=16Ts+15Tmとなる。
【0148】
(実施の形態1のX線検査装置100の構成および動作)
以下、実施の形態1のX線検査装置100の構成および動作について説明する。
【0149】
実施の形態1のX線検査装置100では、以下に説明するように、視野は、(撮像時に)機械的に移動しない。従って、複数の角度の撮像データを得るためには、X線焦点位置とX線検出器位置を変える必要がある。
【0150】
X線焦点位置の高速移動には、走査型X線源を用いる。なお、後に変形例で説明するように、複数の焦点固定型X線源を用いてもよい。X線検出器23の位置移動については、下記の構成を用いる。
【0151】
1)X線検出器23を少なくとも2つ以上設け、かつ、独立に移動可能なようにX線検出器駆動部22を構成する。
【0152】
2)X線検出器23.1での撮像中に、他のX線検出器23.2を撮像準備のために所定の位置に移動させる。
【0153】
以上により、撮像を行う際には、X線検出器23.2が所定の位置に移動済であるので、X線焦点位置を高速に移動させることにより、機械的な移動の無駄時間を削減することが可能となる。
【0154】
図10は、実施の形態1のX線検査装置100の構成を説明するための図である。なお、図1と同一部分には、同一符号を付しており、かつ、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0155】
図10を参照して、X線検出器駆動部22は、X線検出器23.1および23.2をそれぞれ、XYθの自由度で駆動可能なXYθ動作機構となっており、X線源10としては、走査型X線源が用いられている。
【0156】
図10にしめした構成では、検査対象の位置を動かすために、検査対象位置駆動機構(たとえば、X−Yステージ)と、検査対象位置制御部80とが設けられている。
【0157】
また、図10においては、2つの独立に移動可能なX線検出器を使用しているが、X線検出器が2つ以上設けられていてもよい。
【0158】
X線検出器23.1とX線検出器23.2は、独立にX-Y-θ動作が可能である。なお、後に説明するように、X線検出器23の駆動の仕方によって、θ回転の機構は必ずしも設けられていなくてもかまわない。
【0159】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、X線検出器23の移動・回転を行う。ただし、このようなX−Y方向の移動またはX−Y平面内でのθ回転を可能とする構成であり、X線検出器23の移動に対して同様の機能を持つものであれば、これ以外の機構を用いることも可能である。
【0160】
また、検査対象の視野は、演算部70内の検査対象位置制御部80に制御される検査対象位置駆動機構により、上記X線検出器23.1または23.2とは独立にX−Y動作が可能である。さらに、上述のとおり、X線源10の走査型X線源は、X線焦点位置17をX線ターゲット上の任意の位置へ高速に移動させることが可能である。
【0161】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査X線源制御機構60に命令を送り、後に説明するような検査処理のためのフローチャートで示されるプログラムを実行する。また、入力部40からの入力によって検査装置の動作を制御し、各部の状態、または検査結果を出力部50より出力することができる。
【0162】
検査対象位置制御機構は、アクチュエータと検査対象を固定する機構とを備え、検査対象位置制御部80からの命令によって検査対象を移動させる。
【0163】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。
【0164】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0165】
X線源10は、走査X線源制御機構60を通した演算部70からの命令に従って、電子線を発生させ、電子線収束コイル13および偏向ヨーク12とによってターゲット上の指定された位置に電子線を収束させ、X線焦点17を高速に移動させる。
【0166】
図11は、図10に示したX線検査装置100の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0167】
図11(a)に示す動作例1は、図10に示した構成を上から見たものであり、16枚のX線透視画像を等角度から撮像することを想定した動作例1を示すものである。動作例1はFeldkampらよる方法に代表される解析的手法を用いるのに適している。それは、上述したように、通常、解析的手法では投影データにフィルタリング処理を行うが、フィルタリング方向はX線の透過経路の方向に対し垂直方向が望ましいとされている。そのため、解析的手法を用いるためには、X線検出器をX線の透過経路に対し垂直、つまりX線検出器を視野に向かって撮像するのが好ましいからである。
【0168】
図11(b)に動作例2は、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、X線検出器駆動部22の機構の高速化、保守性の向上を図ることができる。
【0169】
図11に示した動作例(移動軌跡)について、さらに詳しく説明すると、以下のとおりである。
【0170】
X線検出器23.1とX線検出器23.2とが独立に動作できる範囲は分かれている。
図11中の位置A1,B1はそれぞれX線検出器23.1および23.2の初期位置とする。位置A1〜A8、位置B1〜B8はそれぞれ画像再構成に必要な透視画像を取得するX線検出器23.1および23.2の位置とする。
【0171】
図11に示した動作例では、X線検出器23.1および23.2は、撮像系の原点を中心とした一定距離で移動する。その結果、撮像系を上から見た場合、それぞれ半円の軌跡を持つ。
【0172】
位置a1、a2、a3、b1、b2はX線ターゲット上の焦点位置であり、それぞれX線検出器位置A1、A2、A3、B1、B2と視野を結ぶ直線状に位置している。
【0173】
撮像を開始するとき、X線検出器23.1および23.2はそれぞれ位置A1、B1で静止しているものとする。
【0174】
i)X線焦点位置a1からX線を発生させ、X線検出器23.1(位置A1)で撮像を行なう。
【0175】
ii)次いでX線焦点位置b1からX線を発生させ、X線検出器23.2(位置B1)で撮像を開始する。位置B1での撮像中に、X線検出器23.1があらかじめ決められた位置A2に移動を開始する。
【0176】
iii)X線検出器23.2(位置B1)での撮像とX線検出器23.1の移動が完了すると、直ちにX線の焦点位置を位置a2に移動させ、X線検出器23.1(位置A2)で撮像をおこなう。この撮像中に、X線検出器23.2はあらかじめ決められた位置B2へ移動する。
【0177】
以上を繰り返すことで、X線検出器の移動時間に伴うX線源の休止時間を削減して画像再構成に必要な撮像枚数を得ることができる。
【0178】
図12は、実施の形態1のX線検査装置100による再構成画像検査のための検査全体のフローチャートを示す図である。
【0179】
図12を参照して、まず、処理が開始されると(S300)、演算部70の検査対象位置制御部80からの命令により、検査対象位置制御機構は、検査対象の検査部分(視野)を撮像可能な位置に移動する(S302)。すなわち、透視画像を撮像するために、検査対象をのせたステージとX線検出器を所定の位置に移動する。通常、検査においては、検査位置の特定のために光学カメラ(図示せず)が搭載されているため、光学カメラの画像をもとに位置を決めることが可能である。その他の方法として、検査対象のCADデータをもとに自動的に決めてもよいし、作業者が目視で行ってもよい。
【0180】
その上で、まずは、透視画像の撮像を行い(S304)、演算部70の良否判定部78は、透視画像を検査して、取得した透視画像から検査対象の視野(透視画像で撮像されている範囲)の良否判定を行う(S306)。良否判定手法は、様々な手法が提案されており、公知のためここでは詳細を記述しない。例えば、もっとも基本的な検査としては、透視画像を一定の値で2値化し、CADデータ等の設計情報と比較し、透視画像上の所定の位置に部品があるかないかを面積により判断する。
【0181】
続いて、演算部70は、再構成画像による検査が必要か否かを判断する(S308)。判断の基準は、CADデータ等の設計情報をもとに予め設定しておくことができるし、透視画像の良否判定結果から判断することも可能である。例えば、実装基板の検査において、片面にのみ部品が実装されている場合、透視画像で良否判定することが可能なため再構成画像による良否判定を行う必要がない場合もある。
【0182】
演算部70は、再構成画像による検査が必要ない場合には、検査を終了させる(S318)。
【0183】
一方、演算部70は、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行わせる(S310)。CT撮像においては、検査対象内の視野(再構成領域もしくは、上記の透視画像撮像範囲と同様の領域)を複数の方向から撮像する。CT撮像の詳しい説明は、後述する。
【0184】
次に、演算部70の3D画像再構成部76は、複数方向の撮像画像から再構成画像を生成する(S312)。再構成処理は、様々な方法が提案されており、たとえば、上述したFeldkamp法を用いることができる。
【0185】
続けて、演算部70の良否判定部78は、再構成画像による良否判定を行う(S314)。良否判定の方法は、3次元データを直接用いる方法や2次元データ(断層画像)、1次元データ(プロファイル)を用いる等の方法が考えられる。これらの良否判定手法は周知であるため検査項目に適した良否判定手法を用いればよく、ここでは詳細の説明は繰り返さない。以下に、良否判定の1例について説明する。まず、3次元再構成画像に一定の値で2値化する。CADデータ等の設計情報から、再構成画像内で部品(たとえば、BGAの半田ボール)のある位置を特定する。2値化画像から部品のある位置に隣接した画素の体積を計算し、部品のあるなしを判断することができる。
【0186】
さらに、演算部70は、全視野の検査を終了したか否かを判断し(S316)、終了していない場合は、処理を、ステップS102に復帰させる。一方で、演算部70は、全視野について検査が終了していれば、本検査を終了させる(S318)。
【0187】
なお、図12中では、透視画像と再構成画像で検査を行っているが、透視画像による検査を行わずに、再構成画像による検査のみを行うことも可能である。ただし、通常、再構成処理は比較的時間がかかるため、再構成画像による検査の前に、透視画像で良否判定をすることで全体の検査時間を短くすることができる。
【0188】
図13は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0189】
また、図14は、図13に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0190】
なお、図13において、フローチャートが3つに分岐した部分については、左の行はX線源の動作、中央の行はX線検出器23.1の動作、右の行はX線検出器23.2の動作を表しており、横方向に並んだ処理は同時におこなわれていることを表す。
【0191】
以下、図13および図14を参照して、まず、1視野のCT撮像処理が開始されると(S400)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象を移動させる。さらに、演算部70は、X線検出器23も、初期位置に、移動しておく。X線検出器23の位置や検査対象の位置は、X線検出器駆動部22や検査対象位置駆動機構(たとえば、X−Yステージ)に搭載されているエンコーダを用いて設定してもよいし、汎用的な検出器(レーザー変位計等)を用いて、設定してもよい。
【0192】
続いて、演算部70は、X線焦点をX線検出器23.1に対応する位置に移動してX線を照射し(S402)、X線検出器23.1で撮像する(S412)。X線焦点位置の設定は上記の方法でよい。撮像時間(検出器の露光時間)は予め設定しておいてもよいし、ユーザが目視により所望の時間に設定することもできる。並行して、演算部70は、X線検出器23.2を次の撮像位置に移動させるとともに、X線検出器23.1による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S422)。
【0193】
次に、演算部70は、X線焦点をX線検出器23.2に対応する位置に移動してX線を照射し(S404)、X線検出器23.2で撮像する(S424)。並行して、演算部70は、X線検出器23.1を次の撮像位置に移動させるとともに、X線検出器23.2による撮像データを、3D画像再構成部78での再構成処理のために、メモリ90に転送する(S414)。
【0194】
続いて、演算部70は、撮像が規定枚数に達したかを判定する(S430)。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS402,412,422に復帰する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S432)、処理をステップS312に移行させる。
【0195】
なお、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、データ転送と同時に撮像枚数の判断を行うのが好ましい。なぜならば、データ転送には、たとえば、200ms程度の時間がかかるため、次の撮像位置への移動が遅くなる。そのため、撮像する度に遅延が発生することになってしまう。この遅延時間を短縮し高速化を図るために、データ転送と行うと同時に、規定枚数の判断と検査対象・X線検出器の移動を行うことが好ましい。
【0196】
さらに、図14に示すように、実施の形態1の撮像方式を用いた場合、1視野の撮像時間は、以下の式(15)および式(16)で表すことができる。
【0197】
Ts > Tm の場合: Tv = NTs …(15)
Ts < Tm の場合: Tv = Ts +(N - 1)Tm …(16)
なお、各記号の意味は以下のとおりである
N :撮像枚数(X線検出器の数の整数倍)
Tv:1つの視野を撮像する時間
Tm:移動機構(ステージ・X線検出器)が移動する時間
Ts:撮像(X線検出器の露光)時間
なお、撮像枚数Nについては、以後の説明のわかりやすさのためにX線検出器の数の整数倍としているが、必ずしも整数倍に限定されるわけではない。
【0198】
図14では、Ts < Tm の場合を示している。
画像の再構成に必要な透視画像の撮像枚数を16枚と仮定し、実施の形態1の撮像方式を用いたとき、再構成に必要な枚数=16枚の画像を得るためにかかる時間は、Ts>Tmの場合には16Ts、Ts<tmの場合にはTs+15Tmとなり、どちらの場合でも、図9で説明した方式を用いて1つの検出器を使用した場合の(16Ts+15Tm)と比較して撮像時間を短縮することが可能である。
【0199】
なお、X線源のX線の強度が向上、X線検出器の高感度化が進展すると、撮像に必要なX線検出器の露光時間が短くなる。従って、あるX線検出器撮像中に、別のX線検出器を所定の撮像位置に移動させるためには、高速なメカ機構が必要となり、場合によっては、あるX線検出器の撮像が終わっても、X線検出器の移動が完了していない場合がある。
【0200】
しかし、いずれにしても、あるX線検出器撮像処理中に、別のX線検出器を所定の撮像位置に移動処理または当該移動させるX線検出器の撮像データの転送処理を並行して行うことで、全体としての処理時間を短縮できる。また、このような並行処理を1視野分の処理全体で繰り返し実行することで、1視野分の処理時間を短縮できる。
【0201】
[実施の形態1の変形例]
図15は、実施の形態1の変形例のX線検査装置102の構成を説明する図である。X線検査装置102は、直線移動型のX線検出器とX線源10として走査型X線源とを用いている。
【0202】
すなわち、X線検査装置102において、3つのX線検出器23.1,23.2および23.3は、それぞれ独立にY移動およびθ回転可能である。図15では、X線検出器支持部22.3が自転可能、かつ、レール状をY方向に移動可能なX線検出器駆動部22の動作機構を示している。ただし、同様の機能を持つものであれば、図15に示す以外の機構でも問題ない。また、後に説明するように、自転機構は必須ではない。
【0203】
X線源10である走査型X線源は、X線焦点位置をX線ターゲット上の任意の位置へ高速に移動させることができる。
【0204】
その他、図1、図10と同一部分には、同一符号を付している。また、図15においても、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0205】
図15においては、3つの独立に移動可能なX線検出器を使用しているが、X線検出器の個数としては、2個以上であればよい。なお、X線検出器の個数が奇数の場合には、以下に説明する利点があるので、X線検出器が3つ以上の奇数個設けられていることがより望ましい。すなわち、奇数個X線検出器を設けることにより、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能となる。これは、たとえば、図12で説明したフローチャートに従って動作する場合に、透視画像を撮影するのに好適である。ただし、検出器の個数と移動機構の個数を最低限に抑えるという点で、コストの観点からは、3個が望ましい。
【0206】
図15に示した構成においては、X線検出器駆動部22は、レール状をY方向にX線検出器を移動可能であり自転軸について自転可能な検出器支持部22.3を備え、X線検出器23の移動・回転を行う。
【0207】
また、図10に示した構成と同様に、検査対象の視野は、演算部70内の検査対象位置制御部80に制御される検査対象位置駆動機構(検査対象が乗っているX−Yステージ等)により、検査対象の視野は、上記X線検出器23.1,23.2および23.3とは独立にX−Y動作が可能である。さらに、上述のとおり、X線源10の走査型X線源は、X線焦点位置17をX線ターゲット上の任意の位置へ高速に移動させることが可能である。
【0208】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査X線源制御機構60に命令を送り、後に説明するような検査処理のためのフローチャートで示されるプログラムを実行する。また、入力部40からの入力によって検査装置の動作を制御し、各部の状態、または検査結果を出力部50より出力することができる。
【0209】
検査対象位置制御機構は、アクチュエータと検査対象を固定する機構とを備え、検査対象位置制御部80からの命令によって検査対象を移動させる。
【0210】
X線検出器駆動部22は、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。
【0211】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0212】
X線源10は、走査X線源制御機構60を通した演算部70からの命令に従って、電子線を発生させ、電子線収束コイル13および偏向ヨーク12とによってターゲット上の指定された位置に電子線を収束させ、X線焦点17を高速に移動させる。
【0213】
図16は、図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0214】
図16に示す動作例1は、図15の構成を上から見たものであり、18枚のX線透視画像を異なる角度から撮像することを想定した動作例である。
【0215】
図16においては、上述のとおり、X線検出器23.1,23.2および23.3は、それぞれレール上を直線的に移動できる機構を有する。さらに、X線検出器23.1,23.2および23.3は、それぞれX線検出器の中心を中心として自転することができる回転機構を有する。
【0216】
X線源10は、走査型X線源である。また、X線検出器23の撮像位置は、図16の配置に限定されるものではなく、等間隔の角度になるようにしてもよい。さらに、撮像枚数は18枚に限定されるものではなく、検査可能な撮像枚数を指定すればよい。撮像枚数の指定は、CADデータ等の設計情報から計算してもよいし、作業者が目視で決めてもよい。
【0217】
図16において、位置A1〜A6、B1〜B6、C1〜C6は、それぞれ画像再構成に必要な透視画像を取得するX線検出器23.1,23.2および23.3の位置である。位置に付された1〜6の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA6の位置で撮像する。
【0218】
また、位置a1、a2、b1、b2、c1、c2はX線ターゲット上の焦点位置であり、X線検出器位置が、それぞれ、位置A1、A2、B1、B2、C1、C2にある時に対応する。
【0219】
図16の動作例1はFeldkampの方法に代表される解析的手法を用いるのに適している。図11(a)の場合と同様に、通常、解析的手法では投影データにフィルタリング処理を行うが、フィルタリング方向はX線の透過経路の方向に対し垂直方向が望ましいとされている。そのため、解析的手法を用いるためには、X線検出器をX線の透過経路に対し垂直、つまりX線検出器を視野に向かって撮像するのが好ましいからである。
【0220】
図17は、図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図として示す図である。
【0221】
図17に示す動作例2では、X線検出器23は、自転をせず、X−Y平面内を平行に移動している。このような動作例2は、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。
【0222】
この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0223】
図18は、図16または図17のように、X線検出器23を移動させて検査する際の検査のフローチャートを示す図である。
【0224】
検査全体のフローは、図12に示したものと同様であるので、図18では、図12のステップS310の1視野のCT撮像の部分を示す。
【0225】
図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。なお、図18フローチャートの4つに分岐した部分について、一番左の行はX線源の動作、中央左よりの行はX線検出器23.1の動作、中央右よりの行はX線検出器23.2の動作、一番右の行はX線検出器23.3の動作を表しており、横方向に並んだ処理は同時におこなわれていることをあらわす。
【0226】
また、図19は、図18に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0227】
以下、図18および図19を参照して、まず、1視野のCT撮像処理が開始されると(S500)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象を移動させる。さらに、演算部70は、X線検出器23も、初期位置に、移動しておく。X線検出器23の位置や検査対象の位置の位置は、X線検出器駆動部22や検査対象位置駆動機構(たとえば、X−Yステージ)に搭載されているエンコーダを用いて設定してもよいし、汎用的な検出器(レーザー変位計等)を用いて、設定してもよい。
【0228】
したがって、図19のタイミングチャートにおいては、X線検出器23.1,23.2および23.3は、それぞれ、初期位置A1,B1,C1にある状態からスタートするものとする。
【0229】
続いて、演算部70は、X線焦点をX線検出器23.1に対応する位置に移動してX線を照射し(S502)、X線検出器23.1で撮像する(S512)。X線焦点位置の設定は上記の方法でよい。撮像時間(X線検出器の露光時間)の設定は、実施の形態1と同様である。
【0230】
次に、演算部70は、X線焦点をX線検出器23.1を3回後に撮像する位置まで移動させるとともに、X線検出器23.1による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S514)。
【0231】
並行して、演算部70は、X線焦点をX線検出器23.2に対応する位置に移動してX線を照射し(S504)、X線検出器23.2で撮像する(S524)。次に、演算部70は、X線焦点をX線検出器23.2をさらに3回後に撮像する位置まで移動させるとともに、X線検出器23.2による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S526)。
【0232】
並行して、演算部70は、X線焦点をX線検出器23.3に対応する位置に移動してX線を照射し(S506)、X線検出器23.3で撮像する(S534)。
【0233】
演算部70は、撮像が規定枚数に達しているか否かを判断し(S540)、達していなければ、処理をステップS532に復帰させる。
【0234】
次に、演算部70は、X線焦点をX線検出器23.3をさらに3回後に撮像する位置まで移動させるとともに、X線検出器23.3による撮像データを、3D画像再構成部78での再構成処理のために、メモリ90に転送する(S532)。
【0235】
以下、同様にして、規定枚数の撮像が終了するまで、処理が繰り返される。
さらに、最後に、X線検出器23.3での撮像が終了すると、X線検出器23.3による撮像データを、3D画像再構成部78での再構成処理のために、メモリ90に転送する(S514)。
【0236】
演算部70は、撮像した枚数が、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S542)、処理をステップS312に移行させる。
【0237】
なお、図18のフローチャート上では、フローの説明の便宜上、演算部70は、データ転送後に規定枚数撮像したかの判断を行っているように記載しているが、実際には、データ転送と同時に撮像枚数の判断を行っている。
【0238】
また、図19のタイミングチャートに示されるように、撮像時間と検出器の移動にかかる時間をそれぞれTs、Tmとすると、以下のようになる。
【0239】
2Ts=>Tmの時 : Tv=NTs
2Ts<Tmの時 : Tv=(N/3−1)(Ts+Tm)+3Ts
なお、各記号の意味は以下のとおりである
N :撮像枚数(X線検出器の数の整数倍)
Tv:1つの視野を撮像する時間
Tm:移動機構(ステージ・X線検出器)が移動する時間
Ts:撮像(X線検出器の露光)時間
なお、撮像枚数Nについては、以後の説明のわかりやすさのためにX線検出器の数の整数倍としているが、必ずしも整数倍に限定されるわけではない。
【0240】
ここで、画像の再構成に必要な透視画像の撮像枚数を18枚と仮定し、図15に示したX線検査装置102の撮像方式(3つのX線検出器を交互に使用)を用いたとき、再構成に必要な枚数の18枚の画像を得るためにかかる時間は、2Ts>Tmの場合には18Ts、2Ts<tmの場合には8ts+5tmとなり、どちらの場合でも、1つの検出器を使用した場合の(16Ts+15Tm)と比較して撮像時間を短縮することが可能である。さらに、図9に示した方式において、3つのX線検出器を用いた場合のTv = NTs+(N/S-1)Tm= 18Ts+5Tm よりも高速である。
【0241】
実施の形態1の変形例では、実施の形態1と同様に、撮像時間の短縮にあたり、大きく重いX線源ではなく、比較的に高速に移動可能な、X線検出器と検査対象とを移動させる。さらに、各構成要素の移動を直線という簡素な機械的機構にすることで、X線検出器が所定位置まで移動する距離が短くなる上、移動速度が大きくなるため、機械的な移動時間が短縮され、高速な検査を実現することが可能となる。
【0242】
[実施の形態2]
実施の形態1の変形例のX線検査装置102は、直線移動型のX線検出器とX線源10として走査型X線源とを用いる構成であった。
【0243】
実施の形態2のX線検査装置104は、X線源10として走査型X線源の代わりに、複数の固定焦点型のX線源を用いる。
【0244】
図20は、このような実施の形態2のX線検査装置104の構成を説明する図である。
X線検査装置104では、X線検出器23が、X線検出器23.1〜23.3の3個設けられていることに対応して、X線源10として3個の固定焦点型のX線源が設けられている。
【0245】
そして、これら3個の固定焦点型のX線源から同時に検査対象の同一視野に対してX線が照射される。この際に、1つのX線検出器に対してX線を入射させるべきX線源からのX線が他のX線検出器に入射することがないように、遮蔽体66が設けられるとともに、X線源の制御のためには、走査X線源制御機構60の代わりに、X線源制御機構64が設けられている。X線源制御機構64は、電子ビームの偏向制御を行なわず、代わりに、3つのX線源を同時に制御する点で、走査型X線源制御機構60と異なる。
【0246】
なお、図15のX線検査装置102の場合と同様に、X線検出器が5つ以上の奇数個設けられていてもよい。奇数個X線検出器を設けることにより、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能となる。これは、たとえば、図12で説明したフローチャートに従って動作する場合に、透視画像を撮影するのに好適である。
【0247】
X線検出器23.1〜23.3を駆動する機構については、基本的には、図15で説明した実施の形態1の変形例のX線検査装置102と同様である。ただし、X線検査装置104では、以下に説明するように、X線検出器23.1〜23.3の移動の態様が、図15で説明したX線検査装置102とは異なる。
【0248】
もっとも、実施の形態2のX線検査装置104でも、実施の形態1の変形例のX線検査装置102と同様に、各構成要素の移動を直線という簡素な機械的機構にすることで、X線検出器が所定位置まで移動する距離が短くなる上、移動速度が大きくなるため、機械的な移動時間が短縮され、高速な検査を実現することが可能となる。
【0249】
図21は、遮蔽体66の上面図である。上述したように、X線検出器23が3個設けられていることに対応して、3つの開口部が設けられ、かつ、3つのX線源が同時に動作した場合に、1つのX線検出器に対してX線を入射させるべきX線源からのX線が、他のX線検出器に入射することがない位置に設置される。
【0250】
遮蔽体66は十分にX線を遮蔽する材質、厚さで作成されており、鉛等が好ましい。X線検出器は直線移動のため、遮蔽体の開口部は矩形(もしくはスリット)となる。また、遮蔽体66のサイズは、X線源CAのX線がX線検出器CCに入らない程度の大きさである。
【0251】
遮蔽体66の開口部のサイズは、X線源CAのX線がX線検出器23.1に十分入る大きさであるが、X線検出器23.2へのX線は遮蔽される程度の大きさである。
【0252】
図22は、図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0253】
図22に示す動作例1は、図20の構成を上から見たものであり、18枚のX線透視画像を異なる角度から撮像することを想定した動作例である。
【0254】
図22においては、上述のとおり、X線検出器23.1,23.2および23.3は、それぞれレール上を直線的に移動できる機構を有する。さらに、X線検出器23.1,23.2および23.3は、それぞれX線検出器の中心を中心として自転することができる回転機構を有する。
【0255】
上述のとおり、X線源10は、走査型X線源でなく、複数、たとえば3個の固定焦点のX線源からなる撮像系である。
【0256】
図15のX線検査装置102とは異なり、X線検出器23.1,23.2および23.3は、一体的に直線動作を行う。
【0257】
3つのX線源からのX線により、X線検出器23.1,23.2および23.3によって同時撮像された後は、X線検出器23.1,23.2および23.3が一体となって、次の撮像位置に直線移動を行う。また、再構成領域が同じになるように、X線検出器23.1,23.2および23.3と同期させて検査対象を位置T1から位置T6まで移動する。
【0258】
さらに、撮像枚数は18枚に限定されるものではなく、検査可能な撮像枚数を指定すればよい。撮像枚数の指定は、CADデータ等の設計情報から計算してもよいし、作業者が目視で決めてもよい。
【0259】
図22において、位置A1〜A6、B1〜B6、C1〜C6は、それぞれ画像再構成に必要な透視画像を取得するX線検出器23.1,23.2および23.3の位置である。位置に付された1〜6の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA6の位置で撮像する。
【0260】
また、位置Sa、Sb、ScはX線源CA、CB、CCそれぞれの焦点位置である。
図22の動作例1も、実施の形態1と同様の理由で、Feldkampの方法に代表される解析的手法を用いるのに適している。
【0261】
図23は、図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図として示す図である。
【0262】
図23に示す動作例2では、X線検出器23は、自転をせず、X−Y平面内を平行に移動している。このような動作例2は、実施の形態1と同様の理由で、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。
【0263】
この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0264】
なお、ここで、X線焦点の位置とX線検出器の位置関係について説明しておく。
CT再構成する視野の中心を原点とした時、視野の中心からX線焦点までの距離をLf、視野の中心からX線検出器の中心までの距離をLsとすると、以下の関係式が成り立つ。
【0265】
Ls = - Lf × (M - 1)
符号が負なのは、向きが反対であることを表す。ただし、Mは拡大率を示し、拡大率は以下の式で表される。
【0266】
M = Hs / Ho
ただし、HsはX線焦点からX線検出器までの高さ、HoはX線焦点から視野の中心までの高さを表す。この関係自体は、他の実施の形態でも同様に成り立つ。
【0267】
図24は、図22または図23のように、X線検出器23を移動させて検査する際の検査のフローチャートを示す図である。
【0268】
ここでも、検査全体のフローは、図12に示したものと同様であるので、図24では、図12のステップS310の1視野のCT撮像の部分を示す。
【0269】
したがって、図24は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0270】
また、図25は、図24に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0271】
以下、図24および図25を参照して、まず、1視野のCT撮像処理が開始されると(S600)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象をX−Y平面内で移動させる。さらに、演算部70は、X線検出器23.1,23.2および23.3も、初期位置に、直線移動させる(S602)。
【0272】
続いて、演算部70は、X線焦点Fa、Fb、FcからX線を、X線検出器23.1,23.2および23.3のそれぞれに同時に照射し、X線検出器23.1,23.2および23.3で同時に撮像する(S604)。撮像時間(X線検出器の露光時間)は予め設定しておいてもよいし、ユーザが目視により所望の時間に設定することもできる。
【0273】
続いて、演算部70は、X線検出器23.1,23.2および23.3を次の撮像位置に移動させるとともに、X線検出器23.1,23.2および23.3による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S606)。
【0274】
次に、演算部70は、撮像が規定枚数に達したかを判定する(S608)。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS602に復帰する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S610)、処理をステップS312に移行させる。
【0275】
なお、ここでも、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、実施の形態1と同様の理由で、データ転送と同時に撮像枚数の判断を行うのが好ましい。
【0276】
さらに、図25に示すように、実施の形態2の撮像方式を用いた場合の、1視野の撮像時間についてさらに説明する。
【0277】
一般的には、以下の式が成り立つ。
Tv=(N/S)Ts+(N/S―1)Tt
記号の定義は以下に示す。
【0278】
Tv:1つの視野を撮像する時間
Tm:同一視野内で撮像位置(ステージ・X線検出器)を移動する時間
Ts:撮像(X線検出器の露光)時間
Tt:撮像データ転送時間
また、X線検出器を直線移動させることにより、X線検出器の移動時間は短縮され、視野の移動距離はX線検出器の移動と比べ大変短い(拡大率に反比例するため通常10分の1程度)ため、Tm < Ttとする。
【0279】
以下の説明では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像として18枚の撮像を行うとする。
【0280】
1視野のCT撮像時間については、マルチX線源の場合、一度の撮像で同時に3枚の撮像画像を取得することができる。そのため、1視野のCT撮像時間Tvは、6回の撮像を行い、5回の撮像データ転送時間の合計であるから、以下の式(17)で表される。この時、撮像画像のデータ転送は、X線検出器23および検査対象の機械的な移動と同時に行うとした。
【0281】
Tv = 6Ts + 5Tt …(17)
したがって、上述した1つの検出器を使用した場合の(16Ts+15Tm)と比較して撮像時間を短縮することが可能である。
【0282】
なお、X線源のX線の強度が向上、X線検出器の高感度化が進展すると、撮像に必要なX線検出器の露光時間が短くなるので、CT手法としては、Feldkampの方法ではなく、反復的手法が好ましい点については、同様である。
【0283】
[実施の形態3]
以上の説明では、実施の形態1または実施の形態2において、X線検出器駆動部22の構成により、主として、1つの視野についてのCT撮像におけるX線検出器23と検査対象の移動時間の観点から、検査時間を短縮できる効果について説明した。
【0284】
次に、実施の形態3では、同一の検査対象の複数の視野(検査部分)に対して、検査を順次行なう場合の検査時間の短縮について説明する。
【0285】
(視野(検査対象)またはX線検出器が回転して撮像する場合の問題点)
解析的手法を使った撮像系を考えた場合、X線検出器の向きは、再構成のためのフィルタ処理の関係から再構成領域の中心とする円軌道に沿ったものが好ましい。
【0286】
そのため、複数角度からの撮像のためのX線検出器の移動については、i)再構成部分を中心とした円軌道で移動する、ii)X−Y−θステージで移動する等が考えられる。このため、機構が複雑となり、X線検出器やステージの移動の高速化にあたってはコストが相対的に高くなる傾向にある。
【0287】
さらに、検査に用いる断層画像は矩形であることが好ましい。なぜならば、検査アルゴリズムは画像が矩形であることを前提として設計されているためである。さらに、検査対象は1度のCT撮像で得られる再構成領域(視野)より広いため、視野分割を行って複数視野をつなぎ合わせて広い領域とするため、矩形の視野をつなぎ合わせることで効率よく検査対象を包含できるためである。
【0288】
図26は、解析的手法を用いて、画像再構成を行なうために、視野(検査対象)またはX線検出器が回転して撮像した場合において、1つの視野についてのCT撮像により検査領域とできる領域を説明するための概念図である。
【0289】
解析的手法を使って再構成を行うと再構成像のある断面において、検査で使える領域は円となる。これは、たとえば、解析的アルゴリズムでは、上述したような逆投影とよばれる手法をもちいるために、各撮像位置においてX線検出器で検出された画像を逆投影すると、有効に逆投影される領域が円となるからである。このとき、解析的手法で得られた円形の再構成領域から矩形部分を切り取ると、1つの視野面積が小さくなり、広い検査領域を検査するのに時間を要する。
【0290】
再構成領域(視野)の形状は、矩形のX線検出器で撮像された画像が重なる部分である。視野(検査対象)が回転する撮像系では、矩形が複数の角度から重なるため円形となる。検査アルゴリズムを適用できる領域が矩形のため、再構成領域が円形であると、円内部の矩形部分のみが検査可能であり、一度に検査できる範囲は円に内接する矩形となる。
【0291】
たとえば、X線検出器で撮像できる視野の断面の1辺の長さを2Lとすると、再構成される領域は半径がLの円となる。この円に内接する正方形は、1辺の長さが√2Lの正方形となる。この正方形が検査できる領域である。よって、従来の撮像系における検査可能な領域の面積は、2L2となる。
【0292】
そのため、従来の撮像系で再構成した画像はX線検出器で撮像した画像データの一部のみを利用していることとなる。そのため、1つの視野の大きさが小さくなり、多くの数の視野を撮像する必要がある。
【0293】
さらに、インライン検査のための高速化という観点では、CT撮像の撮像枚数は少ないほど高速化が図れる。しかし、解析的手法では、少ない撮像枚数の場合、アーチファクト等の多くのノイズが発生し、検査に使用する画像としては不適切であるという問題がある。
【0294】
ここで、たとえば、図3に示したようなX線検出器とX線源の配置で、すなわち、X線源とX線検出器が固定で、視野が機械的に移動(回転)することで、再構成に必要な複数の撮像枚数を得る場合には、検査全体に要する時間を検討すると以下のようになる。
【0295】
図27は、視野(検査対象)が回転する従来の撮像系のタイミングチャートである。
なお、検査全体のフローは、たとえば、図6で説明したものと同様である。
【0296】
以下の説明では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号については、上述した定義と同様である。
【0297】
検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回のメカ移動時間の合計であるから、数式 1で表される。
【0298】
Ti = M(Tv + Te) …(18)
次に、図28は、1視野のCT撮像時間について説明する図である。図28を参照すると、1視野のCT撮像時間Tvは、N回の撮像を行い、N回のメカ移動時間の合計であるから、以下の式(19)で表される。この時、撮像画像のデータ転送はメカ移動と同時に行うとした。
【0299】
Tv = NTs + (N − 1)Tm …(19)
(実施の形態3のX線検査装置106の構成)
以下に説明するように、実施の形態3のX線検査装置106では、まず第1に、X線検出器23を平行配置した上で、反復的手法を用いることにより、X線検出器の円軌道の制約を外し、高速化を図る。第2に、X線検査装置106では、X線検出器23を平行配置した上で、反復的手法を用いることにより、有効矩形領域を大きくし、視野分割数を少なくすることでシステムの高速化を図る。第3には、反復的手法を用いることにより、少ない撮像枚数からでも高精度な再構成画像を生成することで、システムの高速化を図るものである。
【0300】
すなわち、X線検査装置106では、X線検出器23は1個以上で、検査対象の各検査領域(視野)として必要とされる矩形領域に平行配置される。X線検出器23は、X線検出器の検出面と同一平面内を平行移動する。画像再構成のための再構成手法は反復的手法を使用するというものである。
【0301】
ここで、X線源10としてのX線源は、走査型X線源でなくともよい。固定焦点X線源1個でもよいし、複数のX線源でもかまわない。
【0302】
図29は、このような実施の形態3のX線検査装置106の構成を説明する図である。
なお、図1と同一部分には、同一符号を付しており、かつ、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0303】
図29を参照して、X線検出器駆動部22は、X線検出器23.1を、X−Y平面内で平行駆動可能なロボットアームを備えている。なお、図29の例では、X線源10としては、固定焦点型X線源が用いられている。
【0304】
図29にしめした構成では、検査対象の位置をX線検出器23.1とは独立にX−Y平面内で動かすために、検査対象位置駆動機構(たとえば、X−Yステージ)と、検査対象位置制御部80とが設けられている。
【0305】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と検出器支持部22.2とを備え、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。ただし、このようなX−Y方向の移動を可能とする構成であり、X線検出器23の移動に対して同様の機能を持つものであれば、これ以外の機構を用いることも可能である。
【0306】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査X線源制御機構60に命令を送り、後に説明するような検査処理のためのプログラムを実行する。
【0307】
検査対象位置制御機構は、アクチュエータと検査対象を固定する機構とを備え、検査対象位置制御部80からの命令によって検査対象を移動させる。
【0308】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0309】
図30は、図29に示したX線検査装置106の構成において、X線検出器23と検査対象の視野との移動軌跡を上面図として示す図である。
【0310】
図30に示す動作例1は、図29に示した構成を上から見たものであり、16枚のX線透視画像を等角度から撮像することを想定した動作例を示すものである。この動作例は、上述のとおり、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。これは、反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。
【0311】
この動作の場合、X線検出器23を自転する必要がないため、X線検出器駆動部22の構成を簡略化でき、メカ機構の高速化、保守性の向上を図ることもできる。
【0312】
X線検出器23.1は、X線源の焦点17を原点とした一定距離で移動する。その結果撮像系を上から見た場合、X線検出器23.1の中心の軌跡は円となる。
【0313】
図30中で、位置T1、T2は視野の位置であり、それぞれX線検出器位置S1、S2に対応している。
【0314】
図31は、平行移動検出器を用いた撮像系のCT撮像フローチャートである。
ここでも、検査全体のフローは、図12に示したものと同様であるので、図31では、図12のステップS310の1視野のCT撮像の部分を示す。
【0315】
したがって、図31は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0316】
まず、1視野のCT撮像処理が開始されると(S700)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象をX−Y平面内で移動させる。さらに、演算部70は、X線検出器23.1も、初期位置に、移動させる(S702)。撮像位置は、CADデータ等の設計情報から自動的に算出することができる。検査対象はステージに乗っているため、ステージの移動とともに視野を移動することが可能である。
【0317】
続いて、演算部70は、X線焦点17からX線を、X線検出器23.1に照射し、X線検出器23.1で撮像する(S704)。撮像時間(X線検出器の露光時間)は予め設定しておいてもよいし、ユーザが目視により所望の時間に設定することもできる。
【0318】
続いて、演算部70は、X線検出器23.1を次の撮像位置に移動させるとともに、X線検出器23.1による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S706)。
【0319】
次に、演算部70は、撮像が規定枚数に達したかを判定する(S708)。規定枚数は検査をする前にCADデータ等の設計情報から決めてもよいし、作業者が目視により判断してもよい。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS702に復帰する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S710)、処理をステップS312に移行させる。
【0320】
なお、ここでも、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、実施の形態1と同様の理由で、データ転送と同時に撮像枚数の判断を行うのが好ましい。
【0321】
図32は、平行移動X線検出器を用いた撮像系の検査領域を示す概念図である。
再構成領域(視野)の形状は、矩形のX線検出器で撮像された画像が重なる部分である。図26の撮像系では、矩形が複数の角度から重なるため円形となるが、図32では、X線検出器が全て同一方向を向いているため、重なる部分は矩形となる。
【0322】
再構成領域が円形の場合、検査アルゴリズムを適用できる領域が矩形のため、円内部の矩形部分のみが使用可能であり、一度に検査できる範囲が小さい。一方、図32に示す場合、再構成領域は矩形のため、再構成領域内の検査可能な範囲が比較的広い。そのため、総撮像枚数を少なくすることができることから、検査時間を短縮することが可能となる。さらに、矩形を隙間なく並べるのは、円形を隙間なく並べるよりも数が少ない。つまり、総撮像枚数が少なくなるため、検査時間を短縮することが可能となる。
【0323】
X線検出器で撮像できる視野の断面の1辺の長さを2Lとすると、再構成される領域は1辺の長さが2Lの成功形となる。よって、図32のように検査領域が配置される場合、検査可能な領域の面積は4L2となる。図26の撮像系における検査可能な領域の面積は2L2であったから、1視野において従来の撮像系よりも2倍の面積の領域を検査することが可能である。つまり、視野の分割個数を半分にすることができる。
【0324】
上記の効果は、X線検出器が平行移動すれば、直線移動であっても、複数のX線検出器であってもよい。もちろん、X線源が固定焦点X線源であっても、走査型X線源であってもよい。
【0325】
図33は、平行移動X線検出器を用いた撮像系のタイミングチャートである。
以下の説明では、撮像系において検査対象をM個の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は上述のとおりである。
【0326】
図29のX線検査装置106では、図26で説明したような撮像系に対し、視野の分割個数を半分にすることができるため、視野の数はM/2となる。
【0327】
検査対象全体のCT撮像時間Tiは、M/2個の視野を撮像し、M/2回の機械的移動時間の合計であるから、式(20)で表される。
【0328】
Ti = M/2(Tv + Te) …(20)
以上説明したとおり、実施の形態3のX線検査装置では、CT再構成に用いる撮像する際に、X線検出器の移動する範囲が同一平面内で撮像され、X線検出器の向きは同一方向とされる。そして、X線検出器および検査対象(ステージ)の移動モードをX−Yの2軸に限定することにより、移動手段の機構を簡素化し、移動速度の高速化が図られる。さらに、X線検出器と検査対象を相対的に平行移動させることで、CT再構成される視野を矩形にし、自動検査に有効な範囲を広げることにより、自動検査システムの高速化が図られる。
【0329】
[実施の形態4]
以上説明した実施の形態1〜3では、X線検出器23または検査対象を機械的に移動させる時間による検査時間のロスを低減することが可能なX線検査装置について説明した。
【0330】
実施の形態4では、X線源をパルス駆動することによる検査時間の短縮について説明する。
【0331】
すなわち、高速撮像を行うためにはX線の強度はできるだけ強い方がよい。しかしながら、X線強度を上げるために電子ビームの電流を大きくすると、ターゲットが電子ビームの衝突による熱損傷を受ける。そのため、電子ビームの電流を大きくした場合、熱損傷を受けるおそれのある温度に達するまでの短い時間しかターゲットに電子ビームを当てることができない。実施の形態4のX線検査装置では、以下に説明するように、"複数のX線検出器"と"焦点走査型X線源"を用いて、熱課題を解決してX線強度をあげることにより高速撮像を図るものである。
(複数のX線検出器と走査型X線源とを用いてCT撮像する場合の問題点)
以下では、実施の形態4のX線検出装置の構成および動作を説明するための前提として、複数のX線検出器と走査型X線源とを用いてCT撮像する場合の問題点について説明する。
【0332】
図34は、4つの検出器と走査型X線源を使用した撮像を行なうX線検査装置の構成を示す図である。なお、図1と同一部分には、同一符号を付すほか、図34では、説明に直接必要となる部分以外については、図示省略している。
【0333】
図34に示すX線検査装置900は、走査型X線源と、4つのX線検出器23.1〜23.4を用いて構成される。
【0334】
X線検出器23.1〜23.4は、検出器駆動機構22に固定されている。図34では16枚の撮像を想定しているため、検出器駆動機構22は撮像に伴って位置1から位置4まで回転する。
【0335】
検査対象中の視野は、検査対象位置制御機構により、X線検出器23.1〜23.4、X線源と独立にX−Y移動が可能である。図34の構成では、X線焦点を走査することで異なる角度から1つの視野へX線を照射することができるため、検査対象の移動をおこなわないで1つの視野の複数方向からの透視画像を撮像することができる。
【0336】
撮像時の動作としては、以下のようである。
1つのX線検出器23での撮像中は、X線焦点位置17は移動させない。4つのX線検出器23.1〜23.4で順次撮像し、そのときX線焦点17はそれぞれの検出器中心と視野中心を結ぶ直線とターゲットが交わる点に位置する。
【0337】
4つのX線検出器23.1〜23.4での撮像が終了すると、検出器駆動部22により、4つ同時に検出器位置を次の撮像位置へ移動させる。
【0338】
図35は、図34に示すX線検査装置900のCT撮像フローチャートである。
ここでも、検査全体のフローは、図12に示したものと同様であるので、図35では、図12のステップS310の1視野のCT撮像の部分を示す。
【0339】
したがって、図35は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0340】
また、図36は、図35に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0341】
以下、図35および図36を参照して、まず、1視野のCT撮像処理が開始されると(S800)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象をX−Y平面内で移動させる。さらに、演算部70は、X線検出器駆動機構22も、所定の位置(このときは、位置1)に移動させ、X線焦点17からX線を、X線検出器23.1に照射し、X線検出器23.1で撮像する(S802)。
【0342】
次に、演算部70は、X線焦点17から、X線をX線検出器23.2に照射し、X線検出器23.2で撮像する(S804)。
【0343】
次に、演算部70は、X線焦点17から、X線をX線検出器23.3に照射し、X線検出器23.3で撮像する(S806)。
【0344】
次に、演算部70は、X線焦点17から、X線をX線検出器23.4に照射し、X線検出器23.4で撮像する(S808)。
【0345】
続いて、演算部70は、X線検出器23.1〜23.4による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S810)。
【0346】
次に、演算部70は、撮像が規定枚数に達したかを判定する(S812)。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS814に移行する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S816)、処理をステップS312に移行させる。
【0347】
ステップS814では、演算部70は、X線検出器駆動機構22を、次の所定の位置(このときは、位置2)に移動させ、処理をステップS802に移行する。
【0348】
以下、ステップS812で、規定枚数に達したと判断するまで、ステップS802〜S810およびS814の処理を繰り返す。
【0349】
図36の1視野の複数方向撮像タイミングチャートを参照して、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は上述のとおりとする。
【0350】
このとき、検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回のメカ移動時間の合計であるから、式(21)で表される。
【0351】
Ti = MTv + (M−1)Tm …(21)
次に、1視野のCT撮像時間について説明する。
【0352】
1視野のCT撮像時間Tvは、S個のX線検出器を使用してN回の撮像を行い、N/S回の移動をおこなうため、式(22)で表される。この時、撮像画像のデータ転送は機械的な移動と同時に行うとした。
【0353】
Tv = NTs+(N/S-1)Tm …(22)
よって、図34に示す従来法で1視野を異なる角度から16枚撮像するために要する時間Tvは、Tv=16Ts+3Tmである。
【0354】
(実施の形態4のX線検査装置110の構成)
以下に説明するように、実施の形態4のX線検査装置110では、以下に説明する構成を有することで、撮像に要する時間を短縮する。
【0355】
すなわち、図34で説明したような焦点走査型X線源を使用した撮像方法は、X線検出器の機械的移動時間の短縮という点では効果があるものの、撮像の高速化という観点からは、以下のような改善の余地がある。
【0356】
i)走査型X線源は高速にX線焦点位置を移動させることができる。しかし、一つの対象領域を異なる角度から撮像するためには、X線検出器が1個では、十分にその特徴を生かせない。なぜなら、X線検出器の機械的移動にX線焦点移動よりもはるかに長い時間を要するためである。
【0357】
ii)一方で、X線検出器が複数の場合、走査型X線源で順番にX線検出器の撮像データを取得する方法は、撮像で使用しているX線検出器以外のX線検出器は稼動していないため、複数のX線検出器が効果的に高速化に寄与しているとはいえない。
【0358】
iii)X線強度を上げるためには、ターゲット電流を増やす必要があるが、ターゲットが熱損傷を受ける。そのため、大きなターゲット電流を使用する場合は、ターゲットの温度上昇がターゲットが損傷する温度に達する前に焦点を移動させる、すなわち、一点への照射時間を短くする必要がある。ただしこの場合、X線を放射している時間が短いため、X線検出器で画像データを得るには不十分な線量となる。
【0359】
実施の形態4のX線検査装置では、図34の構成から、以下のような点を変更する。
1)ターゲット電流を増やす。
【0360】
2)複数のX線検出器を同時に使用する。
3)ターゲット上の一箇所への電子ビーム照射時間を短くする。
【0361】
4)X線検出器の1回の露光時間中、対応したX線焦点位置へ複数回に分けて強い電子ビームを照射する。
【0362】
1つのX線焦点箇所へ複数回に分けてパルス的に電子ビームを照射することで、ターゲット上のX線ビームが照射される部分は、電子ビームが当たっていない時間中に放熱冷却することができる。そのため、一定時間の照射でターゲットが損傷する温度に達するほどに強い電子ビームでも、ターゲット温度が許容範囲の時間内に、次のX線焦点位置に移すことで使用できる。また、複数のX線検出器を同時に撮像に利用できるため、全体の撮像時間が短縮される。
【0363】
図37は、実施の形態4のX線検査装置110の構成を説明するためのブロック図である。
【0364】
図37を参照して、X線検査装置110では、4つのX線検出器23.1〜23.4は、円形のセンサベース22.6上に同一円周上で90度の角度ごとに固定されている。X線検出器駆動部22によりセンサベース22.6が所定角度ずつ回転することで、図34と同様に、位置1〜4に検出器配置が移動する。
【0365】
さらに、後に説明するように、4つのX線検出器23.1〜23.4は、同時にアクティブとなり、X線のセンシングを行なうために、X線の照射をX線焦点がそれぞれ対応する検出器方向のみに制限するために遮蔽体66を設置している。
【0366】
その他、図1と同一の構成部分には同一の符号を付して説明は繰り返さない。また、図37でも、図1の構成において、以後の説明に直接関連していない部分については、図示省略している。
【0367】
なお、図37では、4つのX線検出器が互いの位置関係を保ったまま同一円上を移動する系を想定しているが、それぞれの検出器を独立に位置制御できる機構を設けても良い。さらに、X線検出器23の枚数は4枚以上でも以下でもかまわない。同様に、X線焦点位置もX線検出器23の個数に応じて、4つ以上でも以下でもかまわない。
【0368】
以下、動作を説明する。
X線検出器23.1〜23.4が同時に一回の透視画像撮影を行う間に、X線焦点はそれぞれのX線検出器に対応した焦点位置a〜dで複数回静止する。
【0369】
X線検出器23での撮像が終了すると、X線検出器駆動部22により、4つ同時にX線検出器位置を次の撮像位置へ移動させる。
【0370】
図38は、X線検出器23として使用される検出器の構成を示す概念図である。
X線検出器23としては、図38(a)に示すようなフラットパネル検出器に代表される電荷蓄積型のX線検出器、または、図38(b)に示すようなイメージインテンシファイヤを使用することができる。X線検出器23は、入射したX線を種々の手法によって電子に変換し、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)デバイスに蓄積する機能によってX線の入射位置を記録する。
【0371】
電荷の蓄積時間がX線検出器の露光時間となるため、一度の露光時間中の照射線量が同じであれば、連続的に入射するX線でも、複数回パルス的に照射されたX線であっても同一の出力(画像データ)を取り出すことができる。この特性によって、X線検査装置110の検査手法が実現される。
【0372】
図39は、図37に示したX線検査装置110の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0373】
図39に示す動作例は、図37の構成を上から見たものであり、16枚のX線透視画像を異なる角度から撮像することを想定した動作例である。
【0374】
なお、遮蔽体66や、X線検出器駆動部22は図示省略している。
図39を参照して、1つの視野を撮像する際に、X線検出器23.1〜23.4が移動する位置をそれぞれA1〜A4、B1〜B4、C1〜C4、D1〜D4とする。また、X線検出器位置に対応したX線焦点位置をa1,a2,b1,b2,c1,c2,d1,d2等で表している。
【0375】
なお、X線検出器駆動部22が円形のセンサベースであるため、図39では、X線検出器23は、X線検出器駆動部22の回転軸に常に同じ方向を向いて移動している。しかし、たとえば、X線検出器駆動部22を2軸のロボットアーム等で構成し、画像再構成手法に反復的手法やトモシンセシスなどを用いる場合は、移動平面のXY軸に対して同じ向きを保ったままでも良い。
【0376】
図40は、図37に示したX線検査装置110の構成による1視野撮像のフローチャートである。
【0377】
なお、このフローチャートでの動作を説明する前提として、以下のことを確認しておく。
【0378】
1)再構成画像の生成には複数の異なる角度から撮像した視野のX線透視画像が必要である。
【0379】
2)視野はX線検出器回転移動の軸上に設置されている。
3)2つ以上のX線検出器23(この例では4個)を使用する。
【0380】
4)X線検出器はそれぞれの相対的な位置関係を保ったまま、円軌道上を移動する。
5)X線検出器は、撮像時には静止している。
【0381】
6)X線源には、高速にX線焦点移動が可能な走査型X線源を使用する。
7)X線源に対しては、位置を固定した遮蔽体66を設置している。
【0382】
図40を参照して、演算部70が、視野の再構成画像による検査が必要であると判断し、1視野のCT撮像を開始すると(S820)、演算部70からの命令に応じて、すべてのX線検出器23.1〜23.4が露光を開始する。それと同時に、演算部70からの命令に応じて、走査型X線源は、X線検出器23.1〜23.4の各位置に対応した複数箇所からパルス照射をおこなう。撮像(露光)が終了すると、演算部70は、X線源に照射を停止させる(S822)
続いて、演算部70からの命令に応じて、すべてのX線検出器23.1〜23.4はセンサベース22.6の回転軸を中心として、円軌道上で位置を移動する。このとき、X線検出器23は直前に取得した撮像データを円残部70を介してメモリ90へ転送し、電荷を放出することで、再度撮像が可能な状態となる(S824)。
【0383】
続いて、演算部70は、合計撮像枚数が規定枚数に達しているかを判断し、規定枚数に達するまで、ステップS822〜S824の処理を繰り返させる(S826)。
【0384】
演算部70が、規定枚数まで撮像が完了したと判断すると、撮像を終了し、画像の再構成プロセス(S312)に移行する。
【0385】
図41は、4つのX線検出器23.1〜23.4を使用した際の走査型X線源動作を説明するためのタイミングチャートである。
【0386】
図41においては、X線焦点位置を移動させる時間は、露光に要する時間と比較して無視できるほど短い。
【0387】
図41(a)に示すように、図34で説明した撮像方法を用いて、十分な情報量の透視画像一枚を取得するために必要な露光時間と、平衡温度に達したときに耐久可能なターゲット電流をそれぞれTs、Iとする。
【0388】
図41(b)に示すように、X線の強度はターゲット電流に比例するため、ターゲット電流Iを2倍にすると、画像取得に必要な時間Tsを1/2Tsにすることができる。しかし、強力な電子ビームを利用することは温度上昇によりターゲット損傷が生じるため、実際には、図41(b)に示すようにX線源を使用することはできない。ターゲットの温度は電子ビームを照射することで上昇し、一定時間の照射によって平衡状態に達する。このときの温度は照射する電子ビームの電流量に比例するため、この困難さが生じる。
【0389】
そこで、図41(c)に示すように、ターゲット温度が平衡に達するよりもはるかに短い時間間隔でX線焦点位置を移動させる。なお、図41において、aとは、現在のX線検出器23の位置に対応する焦点位置a1〜a4のうちの1つを意味する。他のb,c,d,についても同様である。図41(c)のようなパルス状に電子ビームを流すと、図41(b)の状態では、利用できない大電流を効果的に利用した撮像が可能となる。
【0390】
図41(c)のような電子ビームの駆動を行なう場合、X線が出ている瞬間の各X線焦点位置でのターゲット電流を2Iとすると、図41(a)の例で4TsかけてX線検出器23.1〜23.4で得られたのと同じ情報量の透視画像を撮像するために必要な露光時間は2Tsである。X線検出器23.1〜23.4の合計露光時間は図41(b)の例と同じになるが、ターゲットの損傷なしに撮像することができる。
【0391】
図42は、図37で示したX線検査装置110での1視野撮像のタイミングチャートである。
【0392】
図42に示すとおり、1視野の撮像時間は式(23)で表すことができる。撮像枚数Nは検出器の数の整数倍とする。
【0393】
Tv =(N/S)Tss + (N/S-1)Tss …(23)
なお、各記号の意味は以下のとおりである。
【0394】
N :撮像枚数(X線検出器の数の整数倍)
S :X線検出器の数
Tv:1つの視野を撮像する時間
Tm:メカ(ステージ・X線検出器)が移動する時間
Tss:S個のX線検出器の同時露光のための撮像(X線検出器の露光)時間
なお、撮像枚数Nについては、以後の説明のわかりやすさのためにX線検出器の数の整数倍としているが、必ずしも整数倍に限定されるわけではない。
【0395】
たとえば、画像の再構成に必要な透視画像の撮像枚数を16枚と仮定し、図37〜図41で説明した撮像方式を用いたとき、再構成に必要な枚数である16枚の画像を得るためにかかる時間は、4Tss+3Tmとなる。Tssは前述のとおり、X線の強度を上げることができるため4Ts>Tssとなる。よって、図34で説明した4つの検出器を使用した場合の(16Ts+3Tm)と比較して撮像時間を短縮することができる。
【0396】
図43は、走査型X線源の構造を示す概念図である。
図43(a)は、透過型ターゲット使用のX線源内部構成例であり、図43(b)は反射型ターゲットの例を示している。以下に説明するように、走査型X線源がこのような構造であることにより、実施の形態4のような動作が可能となる。
【0397】
走査型X線源では、電子銃から放出された電子ビームは、収束レンズによって電子ビームのスポット径が絞られる。また、電子ビームは、外部から制御される偏向器によって、X方向・Y方向へ曲げられ、X線ターゲット上の任意の位置に衝突する(ターゲットに衝突する電子ビームを一般にターゲット電流とよぶ)。
【0398】
このとき、X線ターゲットに衝突する電子ビームの運動エネルギーの99%は熱となり、約1%が制動X線となる。
【0399】
上述のとおり、X線ターゲットは、透過型(図43(a))と反射型(図43(b))とがある。透過型の場合、一般にベリリウムやアルミの上のタングステンが蒸着されたものである。
【0400】
なお、X線焦点移動中の露光を防ぐために、電子ビームの位置(X線焦点位置)を変更する際は、電子ビームを停止させてもよい。例えば、電子銃のグリッド電圧を制御することにより電子ビームのON/OFFを行う。
【0401】
[実施の形態5]
以上の説明では、検査対象の視野を変更する場合は、検査対象を検査対象位置制御機構により移動させるものとして説明してきた。
【0402】
ただし、走査型X線源を使用する場合は、一定範囲内であれば、X線焦点位置17とX線検出器23の相対的な位置関係の調整により、検査対象を移動させることなく、視野を変更することが可能である。
【0403】
この場合、1つの視野において画像再構成に必要な複数の画像を撮像する際のX線ターゲット上の焦点の軌跡の中心は、ターゲット中心から外れたものとなる。そこで、このようなCT撮像を、以下この明細書中では、「偏心CT撮像」と呼ぶことにする。
【0404】
実施の形態5におけるX線検査装置では、このような偏心CT撮像と実施の形態1の変形例で説明したようなX線検出器駆動部22とを組み合わせた構成とする。
【0405】
すなわち、一般には、CT画像再構成領域よりも検査領域が広いため、検査領域を複数の視野(1回のCT撮像での再構成領域)に分割する必要がある。通常、視野から視野への移動は検査対象をX−Yステージなどで機械的な移動させることで実現されている。実施の形態5のX線検査装置では、視野から視野への移動をX線焦点位置の電子的移動によるモーションレスで実現することでシステムの高速化を図る。
【0406】
そこで、走査型X線源を用いて、電気的制御によりX線焦点位置を移動させることで、機械的な移動をなくし高速に撮像位置を移動できる。複数のX線検出器23を予め定位置に配置することでX線検出器23の機械的移動時間を短縮する。視野移動をX線焦点位置の移動のみで行うことで、視野移動を高速にする。
【0407】
図44は、このような実施の形態5のX線検査装置120の構成を説明するためのブロック図である。
【0408】
ただし、X線検査装置120の構成は、以下に説明するようなX線検出器23の位置の移動およびX線焦点17の位置の移動の制御を除いては、図10で説明したX線検査装置100の構成と同様であるので、その構成についての説明は繰り返さない。なお、以下に説明するように、X線検出器23を自転させる構成は、本実施の形態においては必要ではなく、X線検出器23は、X−Y平面内で平行に移動するものとする。
【0409】
図45は、平行移動X線検出器を用いた撮像系の動作例を示す図である。
図45では、4つの視野をX線検出器23や検査対象の機械的な移動なしで再構成する例を示している。図45は、図44の構成を上から見たものであり、8枚の透視画像を等角度から撮像することを想定した動作例を示したものである。
【0410】
図45の動作例は、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、機械的な機構の高速化、保守性の向上を図ることができる。
【0411】
図45のような動作が可能であるためには、X線検出器23.1とX線検出器23.2が独立に動作できる範囲は分かれていることが必要である。
【0412】
また、図45においては、位置A1、B1はそれぞれX線検出器23.1とX線検出器23.2の初期位置とする。位置A1〜A4、B1〜B4はそれぞれ画像再構成に必要な透視画像を取得するX線検出器23.1とX線検出器23.2の位置とする。
【0413】
図45の例では、X線検出器23.1とX線検出器23.2とは、撮像系の原点を中心とした一定距離で移動する。その結果撮像系を上から見た場合、それぞれ半円の軌跡を持つ。ただし、X線検出器23の移動は円軌道に限られるものではない。
【0414】
図45において、位置a1−1,a2−1,b1−1,b2−1はX線ターゲット上の焦点位置17である。焦点位置a1−1は、視野1を撮像する際のX線検出器位置A1に対する焦点を示し、焦点位置a2−1は、視野2を撮像する際のX線検出器位置A1に対する焦点を示す。視野1を撮像する際には、X線検出器位置A1〜A4に応じて、焦点位置a1−1から、順次、焦点位置a1−2,a1−3,a1−4(図示せず)をターゲット上の図中の点線のような円の軌道上に位置させ、同様に、焦点位置a2−1についても同様に、X線検出器位置A1〜A4に応じて、焦点位置a2−1から、順次、焦点位置a2−2,a2−3,a2−4(図示せず)をターゲット上の図中の点線のような円の軌道上に位置させる。焦点位置b1−1は、視野1を撮像する際のX線検出器位置B1に対する焦点を示し、焦点位置b2−1は、視野2を撮像する際のX線検出器位置B1に対する焦点を示す。焦点位置b1−1および焦点位置b2−1も焦点位置a1−1,a2−1と同様に、X線検出器位置B1〜B4に応じて、ターゲット上で図中の点線のような円の軌道上の他の焦点位置に移動する。
【0415】
図45のようにX線検出器23およびX線焦点位置の移動を伴う検査の全体的なフローは、図12で示したものと同様である。
【0416】
ただし、実施の形態5のX線検査装置120では、2個目以降の視野については、視野の移動の時間が短縮される。なぜならば、1つの視野についての最後の撮像を始めると同時に、もう片方のX線検出器を次の視野の撮像位置に移動させておくためである。この時、ステージを移動させる必要がないようにX線焦点位置のみを変更することで対応する。つまり、図45の動作例で示したように視野によって、撮像される角度が異なるように撮像する。ただし、このような等間隔でない撮像を行うと再構成画像が劣化する可能性があるが、反復的手法を用いることで劣化を軽減することが可能である。
【0417】
図46は、図44および図45で説明した撮像系の1視野についての検査の処理のフローチャートである。
【0418】
図47は、図44および図45で説明した撮像系の1視野についての検査タイミングチャートである。
【0419】
以下、図46および図47を参照して、実施の形態5のX線検査装置120の1視野についての検査処理を説明する。
【0420】
まず、CT撮像を始める前に、視野(検査対象)、X線検出器23は所定の初期位置A1,B1にあるものとする。
【0421】
1視野についてのCT撮像が開始されると(S900)、最初に、演算部70は、X線検出器23.1にて検査対象を撮像させる(S902)。すなわち、演算部70は、X線焦点をX線検出器23.1に対応する位置a1−1に移動し撮像する。なお、X線焦点の移動は、電子的に行われるため露光時間やメカ移動時間と比べ無視できるほど高速である。撮像(検出器の露光)時間は予め設定しておいてもよいし、目視で任意の時間に設定することもできる。検査対象の撮像データは、X線源からX線を照射し、X線検出器を露光することで得られる。露光時間は、検査対象のサイズや、X線源の発生するX線の強度から予め決めておくことが可能である。
【0422】
次に、演算部70は、X線検出器23.1で撮像した画像データを演算部70に対して転送させる(S906)。画像取得制御機構30により、演算部70の使用するメモリ90に撮像データを転送する。
【0423】
このデータ転送と並行して、演算部70は、焦点位置b1−1でX線を照射しX線検出器23.2にて検査対象を撮像する(S904)と同時にX線検出器23.1を次の撮像位置に移動する(S906)。X線検出器23.2の撮像は上述したX線検出器23.1の撮像と同様に行う。なお、この時にX線検出器23.2で撮像するために、X線焦点17を移動させる必要があるが、他の処理と比較して高速である。X線検出器23.1の次の撮像位置(A2)は、検査前に決めておく必要がある。通常、X線検出器で撮像する位置はCADデータ等の設計情報から撮像枚数を決める時に、決めることができる。
【0424】
続いて、1視野についての撮像の規定枚数に達していない場合(S910)、演算部70は、X線検出器23.2で撮像した画像データを演算部70に転送する(S912)。このデータ転送と並行して、演算部70は、焦点位置a1−2でX線を照射しX線検出器23.1にて検査対象を撮像する(S910)と同時にX線検出器23.2を次の撮像位置(B2)に移動させる(S912)。同様に、次の撮像位置(B2)も、検査前に決めておく必要がある。
【0425】
以下同様にして、X線検出器23.2での撮像とX線検出器23.1からの撮像データの転送またはX線検出器23.1の次の撮像位置への移動とを並行して行い、あるいは、X線検出器23.1での撮像とX線検出器23.2からの撮像データの転送またはX線検出器23.2の次の撮像位置への移動とを並行して行うことを、撮像枚数が規定枚数に達するまで繰り返す。この点では、図14で説明した実施の形態1の動作と基本的には同様である。
【0426】
そして、規定枚数の撮像が完了すると(S908)、演算部70は、X線検出器23.2からの撮像データの転送とX線検出器23.2の次の撮像位置への移動を行って(S914)、1視野の撮像処理を終了して(S916)、処理をステップS312に移行させる。
【0427】
次に、図47での1視野のCT撮像に要する時間を見積もると以下のようである。
Tv=(N/S−1)Tm+STs
各処理の時間を下記のように定義する。
【0428】
Tm:メカ(X線検出器)が移動する時間
Ts:撮像(X線検出器の露光)時間
S個(例えば2個)のX線検出器23による1視野のCT撮像時間Tvは、N回の撮像時間と、N/S回のメカ移動時間の合計である。ただし、各処理のかかる時間により、Tvは変化する。以下では、一般的な撮像時間を考慮して、Tm>Ts>>Tf(X線焦点の移動時間)(X線焦点は他処理と比較して十分高速であるため無視できる)として計算を行う。
【0429】
さらに、X線検出器が2個の場合について説明する。
まず、X線検出器23.1で撮像するため、Tsの時間がかかる。次に、X線焦点を移動するため、Tfの時間がかかるが、同時にX線検出器23.1を次の撮像位置A2に移動する。X線検出器23.2は既に所定位置に配置されているため、移動時間は発生せずに撮像できるため、Tsの時間がかかる。X線検出器23.2で撮像後、X線検出器23.2を移動させる。次に、X線検出器23.1にて撮像を行うが、移動がまだ終了してない。移動が終了するのが、撮像開始からTs+Tm後となり、位置A2にてX線検出器23.1の撮像を行う。次に、X線検出器23.2の撮像を行うが移動が終了していないため、撮像の開始時間は、Ts+Tm後である。X線検出器23.2で最初に撮像を開始したのが、Ts後であるから、1周期の撮像時間はTmとなる。よって、1周期の撮像時間Tmが(N/2−1)回あり、X線検出器23.1の最初の撮像(A1)時間TsとX線焦点移動時間TfとX線検出器23.2の最後の撮像を加算すると、1視野のCT撮像時間が求まり、式(24)で表される。
【0430】
Tv=(N/2−1)Tm+2Ts …(24)
また、次の視野への移動時間は、X線検出器23.1が次の視野の撮像位置に移動する時間から、X線検出器23.2の撮像時間Tsを引いた時間となるため、式(25)で表される。
【0431】
Te=Tm−Ts …(25)
図48は、図44および図45で説明した撮像系の検査全体についての検査タイミングチャートである。
【0432】
図48では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は以下に示す。
【0433】
検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回の視野移動時間の合計であるから、式(26)で表される。
【0434】
Ti=MTv+(M−1)Te …(26)
ただし、記号に意味は以下の通りである。
【0435】
Ti:検査対象全体を撮像する時間
Tv:1つの視野を撮像する時間
Te:視野の移動時間
X線検査装置120では、視野の移動時間Teは、ほぼ、移動時間Tmと撮像時間Tsとの差となるため、移動時間が大幅に短縮される。
【0436】
[実施の形態5の変形例]
図49は、実施の形態5の変形例のX線検査装置122の構成を説明する図である。X線検査装置122は、直線移動型のX線検出器とX線源10として走査型X線源とを用いている。
【0437】
ただし、X線検査装置122の構成は、以下に説明するようなX線検出器23の位置の移動およびX線焦点17の位置の移動の制御を除いては、図15で説明したX線検査装置102の構成と同様であるので、その構成についての説明は繰り返さない。なお、以下に説明するように、X線検出器23を自転させる構成は本実施の形態の変形例においては、必要ではなく、X線検出器23は、X−Y平面内で平行に移動するものとする。
【0438】
図50は、X線検査装置122の平行移動X線検出器を用いた撮像系の動作例を示す図である。
【0439】
図50では、4つの視野をX線検出器23や検査対象の機械的な移動なしで再構成する例を示している。図50は、図49の構成を上から見たものであり、9のX線透視画像を異なる等間隔の距離から撮像することを想定した動作例を示している。
【0440】
X線検出器の位置A1〜A3、位置B1〜B3、位置C1〜C3はそれぞれ画像再構成に必要な透視画像を取得するX線検出器23.1、X線検出器23.2およびX線検出器23.3の位置である。位置の符号のうち1〜3の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA3の位置で撮像する。ただし、撮像する順番はこの通りでなくてもよい。
【0441】
なお、X線検出器の位置A1〜A3に対応する焦点のターゲット上の軌跡は、焦点軌跡1のような直線となり、X線検出器の位置B1〜B3に対応する焦点のターゲット上の軌跡は、焦点軌跡2のような直線となり、X線検出器の位置C1〜C3に対応する焦点のターゲット上の軌跡は、焦点軌跡3のような直線となる。
【0442】
このようなX線検出器の配置も、やはり、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。そして、この動作の場合、X線検出器23を自転する必要がないため、X線検出器駆動部22を簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0443】
図51は、図49および図50で説明した直線移動検出器を用いた撮像系の1視野についての検査の処理のフローチャートである。
【0444】
図52は、図49および図50で説明した撮像系の1視野についての検査タイミングチャートである。
【0445】
以下、図51および図52を参照して、実施の形態5の変形例のX線検査装置122の1視野についての検査処理を説明する。
【0446】
まず、CT撮像を始める前に、視野(検査対象)、X線検出器23は所定の初期位置A1,B1,C1にあるものとする。
【0447】
1視野についてのCT撮像が開始されると(S920)、最初に、演算部70は、X線検出器23.1にて検査対象を撮像させる(S922)。すなわち、演算部70は、X線焦点をX線検出器23.1に対応する位置a1−1に移動し撮像する。なお、X線焦点の移動は、電子的に行われるため露光時間やメカ移動時間と比べ無視できるほど高速である。撮像(検出器の露光)時間は予め設定しておいてもよいし、目視で任意の時間に設定することもできる。検査対象の撮像データは、X線源からX線を照射し、X線検出器を露光することで得られる。露光時間は、検査対象のサイズや、X線源の発生するX線の強度から予め決めておくことが可能である。
【0448】
次に、演算部70は、X線検出器23.1で撮像した画像データを演算部70に対して転送させる(S926)。画像取得制御機構30により、演算部70の使用するメモリ90に撮像データを転送する。
【0449】
このデータ転送と並行して、演算部70は、焦点位置b1−1でX線を照射しX線検出器23.2にて検査対象を撮像する(S924)と同時にX線検出器23.1を次の撮像位置(A2)に移動する(S926)。X線検出器23.2の撮像は上述したX線検出器23.1の撮像と同様に行う。なお、この時にX線検出器23.2で撮像するために、X線焦点17を移動させる必要があるが、他の処理と比較して高速である。X線検出器23.1の次の撮像位置(A2)は、検査前に決めておく必要がある。通常、X線検出器で撮像する位置はCADデータ等の設計情報から撮像枚数を決める時に、決めることができる。
【0450】
次に、演算部70は、X線検出器23.2で撮像した画像データを演算部70の使用するメモリ90に転送する(S930)。
【0451】
このデータ転送と並行して、演算部70は、焦点位置c1−1でX線を照射しX線検出器23.3にて検査対象を撮像する(S928)と同時にX線検出器23.2を次の撮像位置(B2)に移動する(S930)。X線検出器23.3の撮像も上述したX線検出器23.1の撮像と同様に行う。
【0452】
続いて、1視野についての撮像の規定枚数に達していない場合(S932)、演算部70は、X線検出器23.3で撮像した画像データを演算部70で使用するメモリ70に転送する(S936)。このデータ転送と並行して、演算部70は、焦点位置a1−2でX線を照射しX線検出器23.1にて検査対象を撮像する(S934)と同時にX線検出器23.3を次の撮像位置(C2)に移動させる(S936)。同様に、次の撮像位置(C2)も、検査前に決めておく必要がある。
【0453】
以下同様にして、X線検出器23.2での撮像とX線検出器23.1からの撮像データの転送またはX線検出器23.1の次の撮像位置への移動とを並行して行い、あるいは、X線検出器23.3での撮像とX線検出器23.2からの撮像データの転送またはX線検出器23.2の次の撮像位置への移動とを並行して行い、あるいは、X線検出器23.1での撮像とX線検出器23.3からの撮像データの転送またはX線検出器23.3の次の撮像位置への移動とを並行して行うことを、撮像枚数が規定枚数に達するまで繰り返す。この点では、図14で説明した実施の形態1の動作と基本的には同様である。
【0454】
そして、規定枚数の撮像が完了すると(S932)、演算部70は、X線検出器23.3からの撮像データの転送とX線検出器23.3の次の撮像位置への移動を行って(S938)、1視野の撮像処理を終了して(S940)、処理をステップS312に移行させる。
【0455】
次に、図52のように直線移動検出器を用いた撮像系での1視野のCT撮像に要する時間を見積もると以下のようである。
【0456】
なお、各処理の時間の定義は、上述のとおりである。
S個(例えば3個)のX線検出器による1視野のCT撮像時間Tvは、N回の撮像時間と、N/S回のメカ移動時間の合計である。ただし、各処理のかかる時間により、Tvは変化する。以下では、一般的な撮像時間を考慮して、2Ts>Tm>>Tf(X線焦点の移動は他処理と比較して十分高速である)として計算を行う。
【0457】
さらに、以下では、X線検出器が3個の場合について説明する。
まずX線検出器23.1で撮像するため、Tsの時間がかかる。次に、X線焦点を移動するため、Tfの時間がかかるが、同時にX線検出器23.1を次の撮像位置A2に移動する。X線検出器23.2は既に所定位置に配置されているため、移動時間は発生せずに撮像できるため、Tsの時間がかかる。X線検出器23.2で撮像後、X線検出器23.2を移動させる。次に、X線検出器23.3で撮像する。X線検出器23.3は既に所定位置に配置されているため、移動時間は発生せずに撮像できるため、Tsの時間がかかる。
【0458】
次に、X線検出器23.1にて撮像を行う。既に移動は完了しているため、1周期の撮像時間は、3Tsである。よって、1視野の撮像時間Tvは、以下の式で表される。
【0459】
Tv=NTs
また、次の視野への移動時間は、X線焦点の移動時間のみであるから、以下の式のようになる。
【0460】
Te=Tf
よって、通常の撮像よりも高速な撮像が可能となる。
【0461】
[実施の形態6]
部品が半田付けされたプリント基板をX線で検査する際、プリント基板にはBGAのような再構成画像による検査が必要な部品と、透視画像のみの検査で事足りる部品が混在しているため、次の二種類の方法で撮像が可能なX線検査装置が望ましい。
【0462】
1)検査用画像再構成のために、部品を異なる複数の方向から撮像できる。
2)検査物をX線源の真上に置いての透視画像撮像できる。
【0463】
しかし、解析的画像再構手法に適したX線検出器の配置は、検査対象の垂直軸から一定距離はなれた円軌道上であり、垂直方向の透視画像検査には向いていない。そのため、垂直方向の透視画像撮像と透視画像撮像の両方を可能にする装置は、X線検出器をX−Y移動で透視画像撮像位置へ移動させる機構を有するか、もしくは透視画像撮像専用のX線検出器を追加で配置する必要がある。
【0464】
ただし、X線検出器をX−Y移動で透視画像撮像位置へ移動させる機構を有する場合でも、このような移動機構は、機械的にはできるだけ単純な構成を有することが、移動精度、保守等の観点からは望ましい。また、透視画像撮像専用のX線検出器を設けるのでは、この検出器分のコストが余計に必要となってしまう。
【0465】
そこで、以下に説明するように、実施の形態6のX線検査装置では、以下のような構成を有する。
【0466】
i)直線上で、独立にX線検出器の位置を移動させることができる3つのX線検出器移動機構とX線検出器移動機構に対応した3つのX線検出器(検出器)を設置する。なお、X線検出器の個数としては、2個以上であればよい。なお、X線検出器の個数が奇数の場合には、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能であるという利点があるので、X線検出器が3つ以上の奇数個設けられていることがより望ましい。ただし、検出器の個数と移動機構の個数を最低限に抑えるという点で、コストの観点からは、3個が望ましい。
【0467】
ii)3つのX線検出器移動機構のうちの一つは、X線検出器をX線源および検査対象の真上に位置させることができる移動機構に設置する。
【0468】
上述のとおり、奇数個X線検出器を設けることにより、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能となる。これは、たとえば、後に説明するフローチャートに従って動作する場合に、再構成画像による検査が必要かを判断するための透視画像を撮影するのに好適である。
【0469】
iii)撮像の際、中央のX線検出器を露光している間に、露光していない両端のX線検出器を次の撮像位置へ移動させる。また、両端の2つのX線検出器を露光している間に、露光していない中央のX線検出器を次の撮像位置へ移動させる。
【0470】
iv)2つのX線検出器を同時に露光する際には、2つの検出器に対応する位置で露光時間に対して短い時間間隔でX線焦点を時分割照射(パルス照射)させる。
【0471】
v)画像の再構成の手法としては、反復的手法、またはトモシンセシスによる画像再構成をおこなうことで、円軌道上ではない(直線上の)撮像位置からの画像を再構成に用いる。
【0472】
以下、実施の形態6のX線検査装置の構成および動作について説明する。
図53は、実施の形態6のX線検査装置130の構成を説明する図である。X線検査装置130は、直線移動型のX線検出器とX線源10として走査型X線源とを用いている。1つの視野について撮像中の検査対象の移動は必要ない。
【0473】
さらに、後に説明するように、X線源10をパルス動作させるため、図21に示したのと同様な遮蔽体66が設けられる構成となっている。
【0474】
図21の場合と同様に、遮蔽体66は、十分にX線を遮蔽する材質、厚さで作成されており、鉛等が好ましい。X線検出器23は直線移動をするため、遮蔽体66の開口部は矩形(もしくはスリット)となる。遮蔽体66のサイズは、X線検出器23.1のための焦点位置からのX線が、X線検出器23.3に入らない程度の大きさである。また、遮蔽体66の開口部のサイズは、X線検出器23.1のための焦点位置からのX線が、X線検出器23.1に十分入る大きさであるが、X線検出器23.2へのX線は遮蔽される程度の大きさである。以上の遮蔽体66の大きさおよびその開口部の大きさ関係は、他のX線検出器23.2および23.3についても同様である。
【0475】
検査対象領域、拡大率、X線検出器のサイズに適したスリット状の遮蔽体66を設置することで、複数のX線検出器を同時に露光状態として複数の位置からX線を放射した場合でも、検査対象領域の特定の角度からのみのX線透視画像をX線焦点と検査対象を通る直線状に設置したX線検出器23で取得することができる。
【0476】
遮蔽体66に入射したX線は散乱線を発生させ、すべてのX線検出器23を同時露光・パルス撮像した際には撮像画像の劣化を誘発する可能性がある。たとえば、X線検出器23.1,23.2および23.3を同時露光した場合、X線検出器23.1に向けて照射したX線の散乱線は、X線検出器23.2での撮像に影響を与える可能性がある。そこで、後述するように、X線検出器23を、両端の2つのX線検出器23.1および23.3と中央のX線検出器23.2で露光時間をずらして動作させることで、撮像時間は同じでも、散乱線の影響を抑えた撮像が可能となる。
【0477】
ただし、X線検査装置130の構成は、以下に説明するようなX線検出器23の位置の移動、X線焦点17の位置の移動の制御およびX線源10のパルス動作の制御を除いては、図15で説明したX線検査装置102の構成と同様であるので、その構成についての説明は繰り返さない。なお、以下に説明するように、X線検出器23を自転させる構成は本実施の形態の変形例においては、必要ではなく、X線検出器23は、X−Y平面内で平行に移動するものとする。
【0478】
図54は、図53に示したX線検査装置130の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0479】
図54においては、X線検出器23.1,23.2および23.3は、それぞれレール上を直線的に移動できる機構を有する。
【0480】
X線源10は、上述のとおり、走査型X線源である。また、X線検出器23の撮像位置は、図54の配置に限定されるものではなく、さらに、撮像枚数は18枚に限定されるものではなく、検査可能な撮像枚数を指定すればよい。撮像枚数の指定は、CADデータ等の設計情報から計算してもよいし、作業者が目視で決めてもよい。
【0481】
図54において、位置A1〜A6、B1〜B6、C1〜C6は、それぞれ画像再構成に必要な透視画像を取得するX線検出器23.1,23.2および23.3の位置である。位置に付された1〜6の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA6の位置で撮像する。
【0482】
また、位置a1、a2、b1、b2、c1、c2はX線ターゲット上の焦点位置であり、X線検出器位置が、それぞれ、位置A1、A2、B1、B2、C1、C2にある時に対応する。
【0483】
なお、上述したとおり、本実施の形態では、両端のX線検出器23.1および23.3とは同期して移動する。真ん中のX線検出器23.2は独立で位置を移動する。
【0484】
図54に示す動作例では、X線検出器23は、自転をせず、X−Y平面内を平行に移動している。このような動作例は、上述のとおり、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。
【0485】
この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0486】
図55は、図53および図54で説明した直線移動検出器を用いた撮像系の検査の処理のフローチャートである。
【0487】
図56は、図53および図54で説明した撮像系による1視野についての撮像の検査タイミングチャートである。
【0488】
以下、図55および図56を参照して、実施の形態6の変形例のX線検査装置130の検査処理を説明する。
【0489】
図55を参照して、まず、検査を始める前に、演算部70の検査対象位置制御部80からの命令により、検査対象位置制御機構は、検査対象の検査部分(視野)をX線源10のX線ターゲットの中心を通る垂直軸上に位置させた状態とした上で、X線検出器23.2による撮像で検査を開始するものとする。すなわち、透視画像の撮像するために、検査対象をのせたステージを所定の位置に、X線検出器23.2を初期位置(B3とB4の中間位置)にそれぞれ移動する。また、X線検出器23.1と23.3とは、それぞれ初期位置A1とC1とに移動する。通常、検査においては、検査位置の特定のために光学カメラ(図示せず)が搭載されているため、光学カメラの画像をもとに位置を決めることが可能である。その他の方法として、検査対象のCADデータをもとに自動的に決めてもよいし、作業者が目視で行ってもよい。
【0490】
検査処理が開始されると(S1000)、演算部70は、検査の開始直後において、X線焦点の真上にX線検出器23.2を位置させて撮像をおこなう(S1002)。撮像された画像データは、演算部70の使用するメモリ70に転送され(S1004)、このようにして得られたX線透視画像から、演算部70の良否判定部78は、該当部分の画像再構成検査の必要性を判断する(S1006)。ここでも、必要性の判定(良否判定)の手法は、様々な手法が提案されており、すでに上述したため、ここでは詳細を繰り返さない。
【0491】
演算部70は、再構成画像による検査が必要ない場合には、全視野について検査が終了していると判断すると(S1036)、検査を終了させる(S1040)。
【0492】
一方、演算部70は、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行わせる。
【0493】
図55および図56を参照して、1視野についてのCT撮像においては、検査対象内の視野(再構成領域もしくは、上記の透視画像撮像範囲と同様の領域)を複数の方向から撮像する。
【0494】
演算部70は、X線焦点を両端のX線検出器23.1および23.3に対応する位置に時分割で移動してX線を照射し、X線検出器23.1および23.3で撮像する(S1010)。この撮像と並行して、演算部70は、X線検出器23.2を次の撮像位置(B1)に移動させる(S1020)。なお、この時点では、X線検出器23.2については、移動を行うのみで、撮像データの転送は行わない。
【0495】
続いて、演算部70は、X線検出器23.1および23.3による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S1012)。これと並行して、演算部70は、X線焦点をX線検出器23.2に対応する位置に移動してX線を照射し、X線検出器23.2で撮像する(S1022)。
【0496】
演算部70は、1視野についての規定枚数の撮像が終了していないと判断した場合は(S1030)、処理をステップS1010およびS1020に復帰させる。
【0497】
一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S1030)、処理をステップS1032に移行させる。
【0498】
なお、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、データ転送と同時に撮像枚数の判断を行うのが好ましい。なぜならば、データ転送には、たとえば、200ms程度の時間がかかるため、次の撮像位置への移動が遅くなる。そのため、撮像する度に遅延が発生することになってしまう。この遅延時間を短縮し高速化を図るために、データ転送と行うと同時に、規定枚数の判断と検査対象・X線検出器の移動を行うことが好ましい。
【0499】
次に、演算部70の3D画像再構成部76は、ステップS1032において、複数方向の撮像画像から再構成画像を生成する。
【0500】
続けて、演算部70の良否判定部78は、再構成画像による良否判定を行う(S1034)。ここでも、良否判定の方法は、上述のとおり、周知であるため検査項目に適した良否判定手法を用いればよく、ここでは詳細の説明は繰り返さない。
【0501】
さらに、演算部70は、全視野の検査を終了したか否かを判断し(S1036)、終了していない場合は、視野を次の位置に移動するとともにX線検出器23もそれぞれの初期位置に復帰させ(S1038)、処理を、ステップS1002に復帰させる。一方で、演算部70は、全視野について検査が終了していれば、本検査を終了させる(S1040)。
【0502】
なお、図12中では、透視画像と再構成画像で検査を行っているが、透視画像による検査を行わずに、再構成画像による検査のみを行うことも可能である。ただし、通常、再構成処理は比較的時間がかかるため、再構成画像による検査の前に、透視画像で良否判定をすることで全体の検査時間を短くすることができる。
【0503】
図56に示すように、X線検出器23.1と23.3とで同時露光し、その間にX線検出器23.2は画像再構成に必要な画像を取得できる撮像位置へ移動する。X線検出器23.1と23.3との撮像とX線検出器23.2の移動が完了すると、今度は、X線検出器23.2で撮像を開始し、X線検出器23.1と23.3とは次の撮像位置へ移動する。これらの動作を繰り返しおこなうことで、画像再構成に必要な異なる角度からの複数枚の透視画像を、X線源10の非稼動時間・撮像対象の移動なしに撮像できる。
【0504】
1視野の撮像時間Tvは、以下の式で表される。
Ts>Tmの場合: Tv=2/3NTs
Ts<Tmの場合: Tv=(N/3−1)(Ts+Tm)+2Ts
例として、18枚の撮像に要する時間は、Ts>Tmの場合は12Ts、 Ts<Tmの場合は7Ts+5Tmであり、撮像時間を大幅に高速化することができる。
【0505】
以上の構成により、実施の形態6のX線検査装置130では、以下のような効果の少なくとも1つまたはその組み合わせを奏することが可能である。
【0506】
1)X線検出器23がそれぞれ独立に動作し、X線検出器23中のX線源10の非稼働時間を削減することができる。
【0507】
2)ターゲット電流を大きくし、複数のX線検出器23を同時に露光することで、強いX線を効率的に利用することができる。
【0508】
3)X線検出器の動作を直線に限定することで、X線検出器23の移動機構を簡素化でき、移動を高速化することができる。
【0509】
4)同じ向きに移動する(平行に移動する)X線検出器23で撮影した矩形の画像を、反復的画像再構成アルゴリズムを用いて再構成することで、広範囲の再構成画像を得る。
【0510】
5)また、奇数個、たとえば、3個のX線検出器のうちの1つをX線源10の真上を通る構造にすることで、透視画像撮影、再構成画像撮影の両方に利用することができる。
【0511】
6)また、X線検出器23が3個の場合、中央のX線検出器と両端の2つのX線検出器でタイミングをずらして露光させることによって、中央撮像時の両端のX線検出器への散乱X線と、両端撮像時の中央のX線検出器への散乱X線による画像の劣化を回避することができる。同様の効果は、たとえば、X線検出器23が5個以上奇数個設けられている場合は、中央のX線検出器とこれと1つおきのX線検出器と、残りのX線検出器とで、タイミングをずらして露光させることによっても奏されうる。
【0512】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0513】
10 走査型X線源、11 ターゲット、12 偏向ヨーク、13 電子線収束コイル、14 高圧電源、15 真空ポンプ、19 電子銃、16 電子ビーム、17 X線焦点位置、18 X線、20 検査対象、22 センサベース、23 X線検出器、24 スライダ、25 X線モジュール、26 X線受光部、27 データケーブル、28 電源ケーブル、29 データ処理部、30 画像取得制御機構、32 回転角制御部、34 画像データ取得部、40 入力部、50 出力部、60 走査X線源制御機構、62 電子ビーム制御部、70 演算部、72 走査X線源制御部、74 画像取得制御部、76 3D画像再構成部、78 良否判定部、80 ステージ制御部、82 X線焦点位置計算部、84 撮像条件設定部、90 メモリ、92 X線焦点位置情報、94 撮像条件情報、100 X線検査装置。
【技術分野】
【0001】
本発明は、X線検査方法およびX線検査装置に関する。特に、X線照射を用いて対象物を検査するための撮影方法であって、X線検査方法、X線検査装置に適用しうる技術に関する。
【背景技術】
【0002】
近年、サブミクロンの微細加工技術によりLSI(Large-Scale Integration)の高集積化が進み、従来複数のパッケージに分かれていた機能をひとつのLSIに積め込むことができるようになった。従来のQFP(Quad Flat Package)やPGA(Pin Grid Array)では、ワンパッケージに必要な機能を組み込むことによるピン数の増加に対応できなくなったため、最近では、特に、BGA(Ball Grid Array)やCSP(Chip Size Package)パッケージのLSIが使用される。また、携帯電話機などの超小型化が必要なものでは、ピン数がそれほど必要なくてもBGAパッケージが使用されている。
【0003】
LSIのBGAやCSPパッケージは超小型化には大いに貢献する反面、半田部分等がアセンブリ後には外観からは目に見えないという特徴がある。そこで、BGAやCSPパッケージを実装したプリント基板等を検査する際は、検査対象品にX線を照射して得られた透視画像を分析することで、品質の良否判定が行なわれてきた。
【0004】
たとえば、特許文献1では、透過X線を検出するのにX線平面検出器を用いることで、鮮明なX線画像を得ることができるX線断層面検査装置が開示されている。
【0005】
また、特許文献2では、X線の照射角度を任意に選択して傾斜三次元X線CT(Computed Tomography)における画像の再構成を行なうための方法が開示されている。
【0006】
また、特許文献3では、平行X線検出装置で取得したX線画像に基づいて二次元的な検査を実施し、傾斜X線検出手段にて取得したX線画像に基づいて三次元的な検査を行なうことで、双方の検査を高速に行なうことができるX線検査装置が開示されている。ここでは、複数のX線画像に基づいて検査対象品の3次元画像を再構成する技術についても言及がある。再構成の手法としては、たとえば、「フィルタ補正逆投影法」が挙げられている。
【0007】
また、特許文献4では、X線断層撮影装置において、断層撮影を行なうためにX線源に、直線軌道、円軌道、渦巻軌道で動かす際に、1個のモータで駆動可能な機構が開示されている。ただし、X線源を移動させることになるため、X線源の重量が大きいことと、1個のモータにより駆動する設計となっており高速な移動は困難である。さらに、1個の撮像系において、回転・直線・渦巻移動の3種類の移動モードを実現するために、複雑な機構を有しており移動速度の向上には多くの機構の改良が必要なため、メカの高速化は困難である。
【0008】
さらに、一般の産業用X線透視装置においては、検査対象が微小な場合、できるだけ拡大されたX線透視像が得られることが望ましい。そのためには、X線の発生領域である焦点の大きさが極めて小さくなければならない。そこで、焦点寸法が数μmという透過型X線源であるマイクロフォーカスX線源が使用される。透視像の画質の向上のためにこのようなマイクロフォーカスX線源において、X線を発生させる電子ビーム電流(X線源電流)を大きくすると、ターゲットの電子衝突部(焦点)の発熱によりターゲットが局部的に溶融してしまうために、許容される限界値(許容負荷)が設定されることが一般的である。特許文献5には、このような許容負荷を増大させるために、陽極(ターゲット)が回転する円板であるマイクロフォーカスX線源が開示されている。
【0009】
一方、特許文献6には、X線源の寿命をのばすことと等を目的として、偏向用電磁コイルを用いて、間欠的に電子ビームをデフォーカスすることにより、パルス状のX線を発生することが可能なパルスX線源が開示されている。
【0010】
[X線CTの画像再構成手法]
上述したように、X線CTでは、対象物を透過した後、X線検出器で検出された観測値をもとに、少なくとも対象物の断面画像を再構成する。なお、対象物または対象物の一部について3次元的なX線の吸収率の分布が得られるので、結果的には、対象物または対象物の一部の任意の断面画像、すなわちX線検出器の受光面と交わる面についての画像を再構成することが可能である。このような再構成手法としては、「解析的手法」と「反復的手法」とが知られている。以下、そのような画像再構成手法について、簡単にまとめる。
【0011】
(X線の投影データの説明)
図57は、画像再構成手法を説明するための図である。X線画像再構成は、検査対象物の外部から照射したX線が、検査対象物によってどれだけ吸収(減衰)されたかを複数の角度から計測することにより、検査対象物内部のX線吸収係数の分布を求める手法である。
【0012】
なお、以下では、X線源としては、いわゆる走査型X線源を用いて測定が行なわれるものとして説明を行なう。
【0013】
図57を参照して、X線検出器Daに対応するX線焦点Faから発せられたX線は検査対象(図示していない)を透過してX線検出器Daの画素Paに到達する。X線が検査対象を透過することによって、X線量(X線強度)は検査対象を構成する部品等のそれぞれが有する固有のX線吸収係数に相当する分だけ減衰する。X線強度の減衰量は検出器画素Paの画素値として記録される。
【0014】
X線焦点Faから発せられるX線強度をIとし、X線焦点Faから検出器画素PaまでのX線が通過した経路をtとし、検査対象におけるX線吸収係数分布をf(x,y,z)とすると、検出器画素Paに到達したX線の強度Iaは以下の式(1)で表される。
【0015】
【数1】
【0016】
この式の両辺の対数をとると、経路tに沿ったX線吸収係数分布が以下の式(2)のように線積分値により表わされる。このX線吸収係数分布をX線検出器により計測した値を投影データと呼ぶ。すなわちX線検出器はX線減衰量分布(X線強度分布と置き換えてもよい)を検出する。
【0017】
【数2】
【0018】
(解析的手法(たとえば、FBP法:Filtered Back-Projection法:フィルタ補正逆投影法)の説明)
図57に示すように、解析的手法を用いるにあたっては、1つの検査対象物(あるいは検査対象物の1つの部分)に対して、X線検出器Daの配置とは異なる位置に配置されたX線検出器Dbに対して、焦点Fbから発せられて到達したX線強度Ibについての投影データを検出する。このような投影データを、実際には、1つの検査対象物(あるいは検査対象物の1つの部分)に対して、複数の配置について検出することで、これらの投影データから検査対象物の断面画像を再構成することになる。
【0019】
図58は、図57に示した検査対象物における視野FOV、視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。再構成画素Vの部分を透過したX線は、X線検出器Da、Db上に像を結ぶにあたり、(焦点から再構成画素Vまでの距離)対(焦点からX線検出器までの距離)の比に応じて拡大された像を結ぶことになる。
【0020】
Feldkampらは、この式(2)をもとに3次元画像再構成を行なうための再構成アルゴリズムを提案した。このアルゴリズム(いわゆるFeldkamp法)は非特許文献1に示されているように、公知技術であるのでここでは詳細に説明しない。以下では一般的な手法の一つであるフィルタ補正逆投影法について簡単に説明する。
【0021】
投影データから、X線が通過した経路tに沿って投影データを加算してX線吸収係数分布f(x,y,z)を求める操作を逆投影と呼ぶ。ただし、単純に投影データを加算すると撮像系の点広がり関数によりボケが生じるため、投影データにフィルタをかける。このフィルタにはたとえばShepp−Loganフィルタ等の高周波強調フィルタが用いられる。フィルタをかける方向は、X線の透過経路の方向に対し垂直方向が望ましいとされているが、Feldkamp法では投影データの透過経路の方向が全て同一と近似しフィルタリングを行っており、検査可能な画像を再構成することができる。
【0022】
以下に、本実施形態における画像再構成の手順を示す。まず、X線検出器Daの検出器画素Paの投影データpaをフィルタリングした値pa′を再構成画素Vの画素値vに加算する。さらに、X線検出器Dbの検出器画素Pbの投影データpbをフィルタリングした値pb′を再構成画素Vの画素値vに加算する。すると、v=pa′+pb′となる。この逆投影操作を全てのX線検出器もしくは一部のX線検出器に対して行なうことで、最終的な再構成画素Vの画素値vは以下の式(3)に従って表わされる。
【0023】
【数3】
【0024】
この操作を再構成領域(視野)FOV内の全ての再構成画素Vに対して行なうことにより、検査対象のX線吸収係数分布が求められて再構成画像データが得られる。
【0025】
図59は、このようなフィルタ補正逆投影法の処理手順を示すフローチャートである。
図59を参照して、解析的手法での処理が開始されると(S5002)、まず、複数撮像した投影データのうちから処理対象となる投影データの選択が行なわれる(S5004)。次に、選択された投影データにフィルタをかける処理を行う(S5006)。
【0026】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択し(S5008)、再構成画素Vに対応する検出器画素を求める(S5010)。
【0027】
続いて、再構成画素Vにフィルタリングした画素値を加算し(S5012)、全ての再構成画素について加算を行ったかが判断される(S5014)。全ての再構成画素について処理が終わっていなければ、処理はステップS5008に復帰し、終了していれば、処理は、ステップS5016に移行する。
【0028】
ステップS5016では、全ての投影データについて処理を行ったかが判断される。全ての投影データについて終了していなければ、処理はステップS5004に復帰する。一方、全ての投影データについて終了していれば、再構成画像生成が終了する(S5018)。
【0029】
(反復的手法(SART)の説明)
反復的手法では、検査対象のX線吸収係数分布f(x,y,z)と投影データln(I/Ia)とを方程式と見なし再構成する手法である。
【0030】
図60は、走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。一方、図61は、図60の概念図を上面から見た上面図である。
【0031】
以下に、図60および図61を参照して、反復的手法で再構成する手順について説明する。再構成画像の画素値を一列に並べたベクトルν(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν」と記す)と、投影データを一列に並べたベクトルp(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「p」と記す)を以下の式(4)および式(5)で表現する。
【0032】
以下では、たとえば、再構成画素Vの値をある値に仮定したときにX線焦点FaからのX線がX線検出器Da上に結ばれると計算される画像についての画素を中間投影画素Qaとし、実際にX線検出器Da上で観測された画素を検出器画素Paと呼ぶ。X線検出器Dbについても、それぞれ、中間投影画素Qb、検出器画素Pbと呼ぶ。
【0033】
反復的手法では、仮定された再構成画素ベクトルνとこれに対応する中間投影データベクトルqに対して、以下に説明するように、中間投影データベクトルqが、実際に測定された検出器画素値PaまたはPbを投影データと一致するとみなせるまで、仮定されたベクトルνを更新する反復演算により解νを求める。
【0034】
【数4】
【0035】
ただし、Jは再構成領域(視野)内の画素数、Iは投影データの画素数である。また、Tは転置を示す。νとpを関係付ける投影演算を以下の式(6)のI×J係数行列で表す。
【0036】
【数5】
【0037】
この時、反復的手法での画像再構成は、以下の式(7)線形方程式を解いてνを求める問題として定式化できる。
【0038】
【数6】
【0039】
つまり、vjがpiに対する寄与をwijとする。なお、Wは再構成画像の画素値νが投影データの画素値pに対してどの程度寄与するかを表しており、X線焦点とX線検出器の幾何学的位置から求めることができ、検出確率もしくは重みと呼ばれることもある。
【0040】
反復的手法には、方程式を代数的に解く手法や統計的な雑音を考慮した手法等が考案されているが、以下に一般的に用いられている代数的手法であるSART(Simultaneous Algebraic Reconstruction Technique)について説明する。詳細は、非特許文献2に記載されている。
【0041】
SARTでは、最初に、以下の式(8)で表される初期再構成画像ν0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「ν0」と記す)を仮定する。
【0042】
【数7】
【0043】
初期再構成画像ν0は全て0のデータでもよいし、CAD(Computer Aided Design)データ等から取得したデータを仮定してもよい。
【0044】
次に、投影演算Wを用いて以下の式(9)で表される中間投影データq0(ベクトルを表すために頭部に→つき:以下テキスト本文中では、「q0」と記す)を生成する。
【0045】
【数8】
【0046】
中間投影データq0の生成は、1つの投影データに対し行ってもよいし、複数の投影データに対し行ってもよい。以下は1つの投影データに対し行ったものとして説明する。
【0047】
生成した中間投影データq0とX線検出器から取得された投影データpを比較する。比較方法は差をとる方法と除する方法があるが、SARTでは差(p−q0)をとる。
【0048】
初期再構成画像ν0を更新する。更新に用いる式(反復式)は式(10)のようになる。
【0049】
【数9】
【0050】
なお、式(10)中の以下の式(11)および式(12)は、予め計算しておくことで更新の計算時間を短縮することができる。
【0051】
【数10】
【0052】
上記の計算により生成された再構成画像 を初期画像として代入し、同一の処理を複数
回反復させることで再構成画像データが得られる。
【0053】
図62は、反復的手法の処理を説明するためのフローチャートである。
図62を参照して、まず、反復的手法による処理が開始されると(S5102)、続いて、初期再構成画像の設定が行なわれる(S5104)。上述のとおり、初期再構成画像としては、たとえば、全てが0の値でもよい。次に、複数のX線検出器位置に対応する複数の投影データのうちから処理対象となる投影データを選択する(S5106)。
【0054】
中間投影データを生成する。中間投影データの生成方法は上述したとおりである。(S5108)。
【0055】
さらに、再構成視野FOVのうちの未処理の再構成画素Vを選択する(S5110)。
再構成画素に対応する検出器画素を求める(S5112)。
【0056】
反復式をもとに、再構成画素Vの値を更新する(S5114)。
次に、全ての再構成画素について更新を行ったかが判断され(S5116)、全ての再構成画素について処理が終わっていなければ、処理はステップS5110に復帰し、終了していれば、処理は、ステップS5118に移行する。
【0057】
ステップS5118では、全ての投影データについて処理を行ったかが判断される。全ての投影データについて終了していなければ、処理はステップS5106に復帰する。一方、全ての投影データについて終了していれば、処理はステップS5120に移行する。
【0058】
ステップS5120では、規定の反復回数だけ処理を行ったかが判断され、反復していなれば、処理はステップS5104に復帰して現在の再構成画素値を初期再構成画像として採用して処理を繰り返し、処理を規定回数だけ反復していれば、再構成画像生成が終了する(S5022)。
【0059】
以上のようにX線検出器により取得された投影データから、検査対象物の3次元画像を再構成できる。
【0060】
ただし、解析的手法では、フィルタリング処理をX線検出器の各画素に対して行う場合の計算の容易さ等の理由から、複数の投影データの各々を取得するために、X線検出器および焦点と対象物との相対位置を変更した場合でも、X線の焦点とX線検出器との相対的な配置は、一定の関係を維持することが望ましい。言い換えると、焦点からX線検出器を見たときには、見通される立体角内の対象物の視野に含まれる部分の角度・対象物内の位置等は変化しても、焦点とX線検出器との位置関係は、一定のままであることが望ましい。しかも、上記のような逆投影法を行なうにあたっては、アーチファクト等の低減のためには、複数の投影データは、対象物の視野に含まれる部分について、等角度ごとに取得されることが望ましい。
【0061】
これに対して、反復的手法では、このようなX線の焦点とX線検出器との相対的な配置に、このような制限はない。
【先行技術文献】
【特許文献】
【0062】
【特許文献1】特開2000−46760号公報
【特許文献2】特開2003−344316号公報
【特許文献3】特開2006−162335号公報
【特許文献4】特公平5−86218号公報
【特許文献5】特開2001−273860号公報
【特許文献6】特開2005−347174号公報
【非特許文献】
【0063】
【非特許文献1】L.A.Feldkamp,L.C.Davis and J.W.Kress,“Practical cone−beam algorithm”,Jounrnal of the Optical Society oFamerica.A, 612−619(1984)
【非特許文献2】A.H.Anderson and A.C.Kak,“SIMULTANEOUS ALGEBRAIC RECONSTRUCTIONTECHNIQUE(SART):A SUPERIOR IMPLEMENTATION OF THE ART ALGOITHM”,ULTRASONIC IMAGING 6, 81−94(1984)
【発明の概要】
【発明が解決しようとする課題】
【0064】
しかしながら、工場のインラインでの検査では、製品の全数検査を行なうことが必要となるために、製造効率の観点からは、X線検査に要する時間を短縮することが必要となる。
【0065】
また、上述した従来のX線検査に関するX線撮影技術では、再構成できる検査エリアの面積を大きくすると、撮像および3D化(再構成)演算に時間を要する。たとえば、上述したようなプリント基板等を検査するためには、その検査対象の全体ではなく、複数の特定の部分の画像を得られればよい場合が多い。このような場合において、検査対象について検査をしたい部分が飛び地状に配置されているときに、その全体を包含する面積(または体積)を検査対象としうるX線検出機を用意するのは、装置の大型化や演算負荷の増加等の観点から効率的でない。
【0066】
さらに、上述した従来のX線検査に関するX線撮影技術では、検査エリアを変更させるのに撮像系あるいは検査対象ワークを動かす必要があり、可動部分が増える。このことは、上述したX線検査に要する時間の問題だけでなく、駆動部分を製造するためのコストや、保守性、信頼性にも関係する。たとえば、上述したようなプリント基板等を検査する際には、検査の対象となる部分は、ステージに置かれているプリント基板の一部である場合が多い。しかも、このような場合、得られるX線像を拡大像とするために、X線検出器は、検査対象から比較的離れた位置を駆動されることになるものの、検査対象となる部分は、微小部分であるために、極めて高精度に撮像系の駆動を制御する必要が生じる。このため、撮像系の駆動機構については、できる限り少ない自由度で、必要な画像の撮像が行なえなければならない。
【0067】
本発明は、上記のような問題を解決するためになされたものであって、その目的は、検査対象物の所定の検査エリアを選択的に高速に検査することができるX線検査装置およびこのようなX線撮影方法を利用したX線検査方法を提供することである。
【0068】
この発明の他の目的は、可動部分を削減して、低コストで、保守性や信頼性に優れたX線検査装置およびこのようなX線撮影方法を利用したX線検査方法を提供することである。
【0069】
この発明のさらに他の目的は、検査対象物を移動させることなく、高速に検査対象物の複数の部分を検査することが可能なX線検査装置およびこのようなX線撮影方法を利用したX線検査方法を提供することである。
【課題を解決するための手段】
【0070】
本発明の1つの局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査装置であって、複数の検出面で撮像するための複数のX線検出器と、各X線検出器を独立に移動させる検出器駆動手段と、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するように対応させてX線を出力するX線出力手段と、X線検査装置の動作の制御を行う制御手段とを備え、制御手段は、各X線検出器の露光タイミングと、検出器駆動手段とを制御する画像取得制御手段と、X線出力手段を制御するためのX線出力制御手段と、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成する画像再構成処理手段とを含み、画像取得制御手段およびX線出力制御手段は、複数のX線検出器のうちの一部を複数の撮像位置のうちの第1の位置で露光させる処理と、一部とは異なる他の一部を複数の撮像位置のうちの第2の位置に移動させる処理とを並行して実行する。
【0071】
好ましくは、画像取得制御手段およびX線出力制御手段は、1つの対象物の検査対象領域について、画像データの再構成に対して予め設定された個数の撮像位置での撮像を複数回に分けて行うために、複数のX線検出器のうちの一部について第1の位置のうち今回撮像する撮像位置で露光させる処理および2回後の撮像に対応する撮像位置へ移動させる処理と、複数のX線検出器のうちの他の一部について第2の位置のうち次回の撮像に対応する撮像位置へ移動させる処理および次回の撮像位置で露光させる処理とを並行して交互に実行させる。
【0072】
好ましくは、検出器駆動手段は、複数のX線検出器を所定の1軸方向に沿って独立に移動させる1軸駆動手段を含む。
【0073】
好ましくは、1軸駆動手段は、複数のX線検出器を所定の平面内で平行に移動させる。
好ましくは、X線出力制御手段は、複数の検出面について、X線が検査対象領域を透過して各検出面に対して入射するようにX線の放射の起点位置の各々を設定する起点設定手段を含み、X線出力手段は、各起点位置にX線源のX線焦点位置を移動させて、X線を発生させる。
【0074】
好ましくは、X線出力手段は、撮像位置に配置されている複数のX線検出器のうち同時に露光状態となっている複数のX線検出器に対して、それぞれ対応する複数のX線焦点位置からX線を発生させ、X線出力手段からのX線が、同時に露光状態となっているX線検出器のそれぞれに対して、対応するX線焦点位置から検査対象領域を透過して各検出面に対して入射するX線は透過する一方、対応しないX線焦点位置からのX線は遮蔽する遮蔽部材とをさらに備える。
【0075】
好ましくは、X線出力手段は、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、X線出力制御手段は、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線出力手段を制御する。
【0076】
好ましくは、検出器駆動手段は、複数のX線検出器を所定の平面内で平行に移動させる平行駆動手段を含む。
【0077】
好ましくは、検出器駆動手段は、複数のX線検出器を所定の2軸方向に沿ってそれぞれ独立移動させる2軸駆動手段を含む。
【0078】
好ましくは、複数のX線検出器の検出面はそれぞれ矩形形状であり、検出器駆動手段は、複数のX線検出器の検出面の一方端が、各撮像位置においてX線出力手段に向かう方向と交わるように、複数のX線検出器を自転させる自転手段を含む。
【0079】
好ましくは、画像再構成処理手は、反復的手法により検査対象領域の画像データを再構成する。
【0080】
好ましくは、画像再構成処理手段は、解析的手法により検査対象領域の画像データを再構成する。
【0081】
この発明の他の局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査装置であって、複数の検出面で撮像するための複数のX線検出器と、各X線検出器を所定の1軸方向に沿って移動させる検出器駆動手段と、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するように対応させてX線を出力するX線出力手段と、X線検査装置の動作の制御を行う制御手段とを備え、制御手段は、各X線検出器の露光タイミングと、検出器駆動手段とを制御する画像取得制御手段と、X線出力手段を制御するためのX線出力制御手段と、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成する画像再構成処理手段とを含む。
【0082】
好ましくは、1軸駆動手段は、複数のX線検出器を所定の平面内で平行に移動させる。
好ましくは、X線出力制御手段は、複数の検出面について、X線が検査対象領域を透過して各検出面に対して入射するようにX線の放射の起点位置の各々を設定する起点設定手段を含み、X線出力手段は、各起点位置にX線源のX線焦点位置を移動させて、X線を発生させる。
【0083】
好ましくは、X線出力手段は、撮像位置に配置されている複数のX線検出器のうち同時に露光状態となっている複数のX線検出器に対して、それぞれ対応する複数のX線焦点位置からX線を発生させ、X線出力手段からのX線が、同時に露光状態となっているX線検出器のそれぞれに対して、対応するX線焦点位置から検査対象領域を透過して各検出面に対して入射するX線は透過する一方、対応しないX線焦点位置からのX線は遮蔽する遮蔽部材とをさらに備える。
【0084】
好ましくは、X線出力手段は、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、X線出力制御手段は、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線出力手段を制御する。
【0085】
好ましくは、画像再構成処理手段は、反復的手法により検査対象領域の画像データを再構成する。
【0086】
この発明のさらに他の局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面にそれぞれ対応するX線検出器で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査方法であって、各X線検出器を対応する撮像位置に独立に移動させるステップと、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するようにX線を出力するステップと、複数のX線検出器のうちの一部を複数の撮像位置のうちの第1の位置で露光させる処理と、一部とは異なる他の一部を複数の撮像位置のうちの第2の位置に移動させる処理とを並行して実行するステップと、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成するステップとを備える。
【0087】
好ましくは、並行して実行するステップは、1つの対象物の検査対象領域について、画像データの再構成に対して予め設定された個数の撮像位置での撮像を複数回に分けて行うために、複数のX線検出器のうちの一部について第1の位置のうち今回の撮像位置で露光させる処理および2回後の撮像に対応する撮像位置へ移動させる処理と、複数のX線検出器のうちの他の一部について第2の位置のうち次回の撮像に対応する撮像位置へ移動させる処理および次回の撮像位置で露光させる処理とを並行して交互に実行させるステップを含む。
【0088】
好ましくは、X線を出力するステップは、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線を出力するステップを含む。
【0089】
この発明のさらに他の局面に従うと、対象物の検査対象領域を透過したX線を複数の検出面にそれぞれ対応するX線検出器で受光することにより、検査対象領域の像の再構成処理を実行するためのX線検査方法であって、各X線検出器を所定の1軸方向に沿って対応する撮像位置に移動させるステップと、検査対象領域を透過したX線が、それぞれ複数の撮像位置に移動した複数のX線検出器に入射するようにX線を出力するステップと、複数の検出面で検出した、検査対象領域を透過したX線の強度分布のデータに基づき、検査対象領域の像データを再構成するステップとを備える。
【0090】
好ましくは、1つの対象物の検査対象領域について、画像データの再構成に対して予め設定された個数の撮像位置での撮像を複数回に分けて行うために、複数のX線検出器のうちの一部について今回の撮像位置で露光させる処理および2回後の撮像に対応する撮像位置へ移動させる処理と、複数のX線検出器のうちの他の一部について次回の撮像に対応する撮像位置へ移動させる処理および次回の撮像位置で露光させる処理とを並行して交互に実行させるステップをさらに備える。
【0091】
好ましくは、X線を出力するステップは、X線源の連続面であるターゲット面上に照射する電子ビームを偏向させることでX線源焦点位置を移動させ、同時に露光状態となっているX線検出器のそれぞれに対して、X線が時分割で入射するように、X線を出力するステップを含む。
【発明の効果】
【0092】
本発明に係るX線検査方法およびX線検査装置によれば、検査対象物の所定の検査エリアを選択的に高速に検査することができる。
【0093】
または、本発明に係るX線検査方法およびX線検査装置によれば、可動部分を削減して、低コストで、保守性や信頼性に優れたX線検査を実行することが可能である。
【0094】
または、本発明に係るX線検査方法およびX線検査装置によれば、高速に検査対象物の複数の部分を検査することが可能である。
【図面の簡単な説明】
【0095】
【図1】本発明に係るX線検査装置100の概略ブロック図である。
【図2】走査型X線源10の構成を示す断面図である。
【図3】第1の移動機構の例を示す概念図である。
【図4】第2の移動機構の例を示す概念図である。
【図5】第3の移動機構の例を示す概念図である。
【図6】図3〜図5のいずれかの移動機構を再構成画像検査のための検査全体のフローチャートである。
【図7】図6で説明したフローチャートに従う検査全体のタイミングチャートである。
【図8】図6で説明した1視野のCT撮像の処理を示すフローチャートである。
【図9】図8で説明した1視野のCT撮像の処理において、複数方向で撮像を行なう処理のタイミングチャートである。
【図10】実施の形態1のX線検査装置100の構成を説明するための図である。
【図11】図10に示したX線検査装置100の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図12】実施の形態1のX線検査装置100による再構成画像検査のための検査全体のフローチャートである。
【図13】図12に説明したステップS310の1視野のCT撮像のフローチャートである。
【図14】図13に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図15】実施の形態1の変形例のX線検査装置102の構成を説明する図である。
【図16】図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図17】図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図である。
【図18】図16または図17のように、X線検出器23を移動させて検査する際の検査のフローチャートである。
【図19】図18に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図20】実施の形態2のX線検査装置104の構成を説明する図である。
【図21】遮蔽体66の上面図である。
【図22】図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図23】図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図である。
【図24】図22または図23のように、X線検出器23を移動させて検査する際の検査のフローチャートを示す図である。
【図25】図24に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図26】解析的手法を用いて、画像再構成を行なうために、1つの視野についてのCT撮像により検査領域とできる領域を説明するための概念図である。
【図27】視野(検査対象)が回転する従来の撮像系のタイミングチャートである。
【図28】1視野のCT撮像時間について説明する図である。
【図29】実施の形態3のX線検査装置106の構成を説明する図である。
【図30】図29に示したX線検査装置106の構成において、X線検出器23と検査対象の視野との移動軌跡を上面図である。
【図31】平行移動検出器を用いた撮像系のCT撮像フローチャートである。
【図32】平行移動X線検出器を用いた撮像系の検査領域を示す概念図である。
【図33】平行移動X線検出器を用いた撮像系のタイミングチャートである。
【図34】4つの検出器と走査型X線源を使用した撮像を行なうX線検査装置の構成を示す図である。
【図35】図34に示すX線検査装置900のCT撮像フローチャートである。
【図36】図35に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【図37】実施の形態4のX線検査装置110の構成を説明するためのブロック図である。
【図38】X線検出器23として使用される検出器の構成を示す概念図である。
【図39】図37に示したX線検査装置110の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図40】図37に示したX線検査装置110の構成による1視野撮像のフローチャートである。
【図41】4つのX線検出器23.1〜23.4を使用した際の走査型X線源動作を説明するためのタイミングチャートである。
【図42】図37で示したX線検査装置110での1視野撮像のタイミングチャートである。
【図43】走査型X線源の構造を示す概念図である。
【図44】実施の形態5のX線検査装置120の構成を説明するためのブロック図である。
【図45】平行移動X線検出器を用いた撮像系の動作例を示す図である。
【図46】図44および図45で説明した撮像系の1視野についての検査の処理のフローチャートである。
【図47】図44および図45で説明した撮像系の1視野についての検査タイミングチャートである。
【図48】図44および図45で説明した撮像系の検査全体についての検査タイミングチャートである。
【図49】実施の形態5の変形例のX線検査装置122の構成を説明する図である。
【図50】X線検査装置122の平行移動X線検出器を用いた撮像系の動作例を示す図である。
【図51】図49および図50で説明した直線移動検出器を用いた撮像系の1視野についての検査の処理のフローチャートである。
【図52】図49および図50で説明した撮像系の1視野についての検査タイミングチャートである。
【図53】実施の形態6のX線検査装置130の構成を説明する図である。
【図54】図53に示したX線検査装置130の構成において、X線検出器23と走査型X線源との移動軌跡を上面図である。
【図55】図53および図54で説明した直線移動検出器を用いた撮像系の検査の処理のフローチャートである。
【図56】図53および図54で説明した撮像系による1視野についての撮像の検査タイミングチャートである。
【図57】画像再構成手法を説明するための図である。
【図58】視野FOVのうちの再構成の演算対象の再構成画素V、X線焦点Fa、FbならびにX線検出器Da、Dbの配置を上面から見た図である。
【図59】フィルタ補正逆投影法の処理手順を示すフローチャートである。
【図60】走査型X線源を用いた場合の反復的手法での処理の概念を示す概念図である。
【図61】図60の概念図を上面から見た上面図である。
【図62】反復的手法の処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0096】
以下、図面を参照しつつ本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについては詳細な説明は繰り返さない。
【0097】
[実施の形態1]
(1.本発明の構成)
図1は、本発明に係るX線検査装置100の概略ブロック図である。
【0098】
図1を参照して、本発明に係るX線検査装置100について説明する。ただし、以下で記載されている構成、寸法、形状、その他の相対配置などは、特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
【0099】
X線検査装置100は、中心軸を軸21としてX線を出力する走査型X線源10と、複数のX線検出器23.1〜23.Nが取り付けられ、後に説明するように、各X線検出器23.1〜23.Nを指定された位置に駆動するためのX線検出器駆動部22とを備える。また、走査型X線源10とX線検出器23.1〜23.Nとの間には検査対象20が配置される。さらに、X線検査装置100は、X線検出器駆動部22による各X線検出器23.1〜23.Nの駆動やX線検出器23.1〜23.Nからの画像データの取得を制御するための画像取得制御機構30と、ユーザからの指示入力等を受け付けるための入力部40と、測定結果等を外部に出力するための出力部50とを備える。また、X線検査装置100は、走査X線源制御機構60と、演算部70と、メモリ90とをさらに備える。このような構成において、演算部70は、メモリ90に格納された図示しないプログラムを実行して各部を制御し、また、所定の演算処理を実施する。
【0100】
走査型X線源10は、走査X線源制御機構60によって制御され、検査対象20に対しX線を照射する。
【0101】
図2は、走査型X線源10の構成を示す断面図である。
図2を参照して、走査型X線源10においては、電子ビーム制御部62によって制御された電子銃19から、タングステンなどのターゲット11に対し電子ビーム16が照射される。そして、電子ビーム16がターゲットに衝突した場所(X線焦点位置17)からX線18が発生し、放射(出力)される。なお、電子ビーム系は、真空容器9の中に収められている。真空容器9の内部は、真空ポンプ15によって真空に保たれており、電子銃19から高圧電源14によって加速された電子ビーム16が発射される。
【0102】
走査型X線源10においては、電子ビーム16は、電子線収束コイル13により収束された後、偏向ヨーク12によって電子ビーム16を偏向することにより、電子ビーム16がターゲット11に衝突する場所を任意に変更することができる。たとえば、偏向ヨーク12によって偏向された電子ビーム16aはターゲット11に衝突し、X線焦点位置17aからX線18aが出力される。また、同様に、偏向ヨーク12によって偏向された電子ビーム16bはターゲット11に衝突し、X線焦点位置17bからX線18bが出力される。なお、特に断らない場合は、本願発明において、走査型X線源10は透過型である。また、後に説明するように、検査対象物の検査対象部分に応じて設定されるX線の放射の起点となるべき位置(以下、「X線の放射の起点位置」と呼ぶ)からX線を発生させるにあたり、その位置の設定の自由度を高めることができるよう、リング状ではなく、連続面のターゲットであることが望ましい。また、以下の説明では、特に位置を区別して記載しない場合は、総称として、単にX線焦点位置17と示す。
【0103】
なお、X線焦点位置を、上述したX線の放射の各起点位置に移動させるには、たとえば、X線源自体の位置を、その都度、機械的に移動させることも可能である。ただし、図2に示すような構成であれば、X線焦点位置を、X線の放射の起点位置に移動させるにあたり、一定の範囲内であれば、X線源を機械的に移動させることを必要とせず、保守性や信頼性に優れたX線検査装置を実現できる。なお、後に説明するように、X線源を複数個設けておき、起点位置に応じて、切り替えて使用することも可能である。
【0104】
言い換えると、「X線の放射の起点位置」とは、撮像に使用するX線検出器23.i(iは、1〜Nのうちの特定された1つ)の空間的な位置と、検査対象20の検査対象部の空間的な位置とが特定されれば、特定されうる空間的な位置のことを意味し、X線焦点位置とは、実際にX線が出力されるターゲット上の位置を意味する。したがって、「X線の放射の起点位置」にX線焦点位置をもってくるためには、走査型X線源による電子ビームの走査によることも可能であるし、あるいは、X線源そのものを機械的に移動させてもよい。
【0105】
図1に戻って、走査X線源制御機構60は、電子ビームの出力を制御する電子ビーム制御部62を含む。電子ビーム制御部62は、演算部70から、X線焦点位置、X線エネルギー(管電圧、管電流)の指定をうける。X線エネルギーは、検査対象の構成によって異なる。
【0106】
検査対象20は、走査型X線源10とX線検出器23(以下、「X線検出器23.1〜23.N」を総称するときは、「X線検出器23」と呼ぶ)との間に配置される。検査対象20の位置の移動にあたっては、X−Y−Zステージで任意の位置に移動するようにしてもよいし、ベルトコンベアのように一方向に移動することにより検査のための位置に配置するようにしてもよい。なお、検査対象がプリント実装基板のように小さい場合、上述のように、走査型X線源10とX線検出器23とは固定で検査対象を移動させることとしてもよいものの、ガラス基板など検査対象が大面積で、検査対象側を任意に移動させることが困難な場合は、走査型X線源10とX線検出器23との相対的な位置は固定したまま、走査型X線源10およびX線検出器23を移動させてもよい。
【0107】
X線検出器23は、走査型X線源10から出力され、検査対象20を透過したX線を検出して画像化する2次元X線検出器である。たとえば、CCD(Charge Coupled Device)カメラ、I.I.(Image Intensifier)管などである。本願発明では、X線検出器駆動部22に複数のX線検出器を配置することから、スペース効率のよいFPD(フラットパネルディテクタ)が望ましい。また、インライン検査で使うことができるように高感度であることが望ましく、CdTeを使った直接変換方式のFPDであることが特に望ましい。
【0108】
X線検出器駆動部22の構成の詳細については、後述する。
画像取得制御機構30は、演算部70より指定された位置にX線検出器23を移動させるようにX線検出器駆動部22を制御するための検出器駆動制御部32と、演算部70から指定されたX線検出器23の画像データを取得するための画像データ取得部34とを含む。なお、演算部70から画像データを取得するものとして同時に指定されるX線検出器は、後に説明するように撮像の状況により、1個の場合と複数とがありうる。
【0109】
X線検出器駆動部22により駆動されたX線検出器23の位置は位置センサ(図示しない)によって知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0110】
また、X線検出器駆動部22は、拡大率を調整するために上下に昇降できることが望ましい。この場合、X線検出器駆動部22の上下方向の位置をセンサ(図示しない)により知ることができ、検出器駆動制御部32を介して演算部70に取り込むことができる。
【0111】
入力部40は、ユーザの入力を受け付けるための操作入力機器である。
出力部50は、演算部70で構成されたX線画像等を表示するためのディスプレイである。
【0112】
すなわち、ユーザは、入力部40を介して様々な入力を実行することができ、演算部70の処理によって得られる種々の演算結果が出力部50に表示される。出力部50に表示される画像は、ユーザによる目視の良否判定のために出力されてもよいし、あるいは、後で説明する良否判定部78の良否判定結果として出力されてもよい。
【0113】
演算部70は、走査X線源制御部72と、画像取得制御部74と、3D画像再構成部76と、良否判定部78と、検査対象位置制御部80と、X線焦点位置計算部82と、撮像条件設定部84とを含む。
【0114】
走査X線源制御部72は、X線焦点位置、X線エネルギーを決定し、走査X線源制御機構60に指令を送る。
【0115】
画像取得制御部74は、X線検出器駆動部22により指定位置まで駆動されるX線検出器23のうち、画像を取得するX線検出器23を決定し、画像取得制御機構30に指令を送る。また、画像取得制御機構30から、画像データを取得する。
【0116】
3D画像再構成部76は、画像取得制御部74により取得された複数の画像データから3次元データを再構成する。
【0117】
良否判定部78は、3D画像再構成部76により再構成された3Dの画像データあるいは、透視データをもとに検査対象の良否を判定する。たとえば、半田ボールの形状を認識し、当該形状が予め定められた許容範囲内であるか否かを判定する等により良否判定を行なう。なお、良否判定を行なうアルゴリズム、あるいは、アルゴリズムへの入力情報は、検査対象によって異なるため撮像条件情報94から入手する。
【0118】
検査対称位置制御部80は、検査対象20を移動させる機構(図示しない)、たとえば、ステージを制御する。
【0119】
X線焦点位置計算部82は、検査対象物20のある検査エリアを検査する際に、その検査エリアに対するX線焦点位置や照射角などを計算する。なお、詳細は後述する。
【0120】
撮像条件設定部84は、検査対象20に応じて、走査型X線源10からX線を出力する際の条件を設定する。たとえば、X線源に対する印加電圧、撮像時間等である。
【0121】
メモリ90は、X線焦点位置計算部82によって計算されたX線焦点位置が格納されるX線焦点位置情報92と、撮像条件設定部84によって設定された撮像条件や、良否判定を行なうアルゴリズムに関する情報などが格納される撮像条件情報94の他、上述した演算部70が実行する各機能を実現するためのプログラムとを含む。なお、メモリ90は、データを蓄積することができればよく、RAM(Random Access Memory)やEEPROM(Electrically Erasable and Programmable Read-Only Memory)やHDD(Hard Disc Drive)等の記憶装置により構成される。
【0122】
(X線検出器駆動部22の構成1:検出器独立移動のための構成)
X線検査装置100においては、(X線検出器数)<<(再構成に必要な撮像枚数)である。これは、通常は、FPDに要するコストの観点から、必要な撮像枚数分の検出器を一度に設けるのが現実的ではないからである。したがって、X線検出器数をこえる撮像を行う時点で、(X線検出器)/(X線源(X線源))/(検査対象をのせたステージ)を機械的に移動させる必要があり、このような機械的な移動中は撮像処理を行うことができない。
【0123】
以下に説明するように実施の形態1に係るX線検査装置100は、システム全体の高速化に寄与しないこの空き時間の削減を可能とする。
【0124】
(機械的な移動による撮像処理時間のロスの問題点)
以下では、実施の形態1に係るX線検査装置100の構成および動作を説明する前提として、他のX線検査装置として想定可能な構成において、撮像系または検査対象の機械的な移動を可能とする移動機構部分の構成の概略とその問題点について、説明しておく。
【0125】
図3は、第1の移動機構の例を示す概念図である。図3においては、X線源(X線源)とX線検出器が固定で、視野が機械的に移動(回転)することで、再構成に必要な複数の撮像枚数を得る。
【0126】
図4は、第2の移動機構の例を示す概念図である。図4においては、X線検出器を機械的にX−Y面内で平行移動し、かつθ方向に回転するとともに、視野(検査対象の検査部分)もX−Y面内で平行移動することで再構成に必要な複数の撮像枚数を得る。
【0127】
図5は、第3の移動機構の例を示す概念図である。図5においては、X線検出器を機械的にθ方向に回転するとともに、視野(検査対象の検査部分)もX−Y面内で平行移動することで再構成に必要な複数の撮像枚数を得る。
【0128】
以下に詳しく説明するように、上記図3〜図5のいずれの場合も複数の撮像データを得るためには、撮像系または検査対象の機械的な移動が発生し、この移動中は撮像を行うことができないため、この移動時間がシステムの高速化を妨げる。
【0129】
図6は、図3〜図5のいずれかの移動機構を再構成画像検査のための検査全体のフローチャートを示す図である。
【0130】
図6を参照して、まず、処理が開始されると(S100)、検査対象の検査部分(視野)を撮像可能な位置に移動する(S102)。すなわち、透視画像の撮像するために、検査対象をのせたステージとX線検出器を所定の位置に移動する。
【0131】
その上で、透視画像の撮像を行い(S104)、透視画像を検査して、取得した透視画像から検査対象の視野(透視画像で撮像されている範囲)の良否判定を行う(S106)。
【0132】
続いて、再構成画像による検査が必要か否かを判断する(S108)。
再構成画像による検査が必要ない場合には、検査は終了する(S118)。
【0133】
一方、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行う(S110)。CT撮像においては、検査対象内の視野(再構成領域もしくは、上記の透視画像撮像範囲と同様の領域)を複数の方向から撮像する。
【0134】
次に、複数方向の撮像画像から再構成画像を生成する(S112)。続けて、再構成画像による良否判定を行う(S114)。
【0135】
さらに、全視野の検査を終了したか否かが判断され(S116)、終了していない場合は、処理は、ステップS102に復帰する。一方で、全視野について検査が終了していれば、本検査は終了する(S118)。
【0136】
図7は、図6で説明したフローチャートに従う検査全体のタイミングチャートである。
以下の説明では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は以下に示す。
【0137】
このとき、検査対象全体を撮像する時間をTiとし、1つの視野を撮像する時間をTvとし、機械的な移動(ステージ・X線検出器等の移動)に要する時間をTmとし、撮像(X線検出器の露光)時間をTsとする。
【0138】
図7に示すように、検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回の機械的な移動時間Te(視野の移動時間)の合計であるから、以下の式(13)で表される。
【0139】
Ti = MTv + (M−1)Te …(13)
図8は、図6で説明した1視野のCT撮像の処理を示すフローチャートである。
【0140】
図8を参照して、1視野のCT撮像が開始されると(S200)、まず、撮像系および/または検査対象を現在の視野についての撮像位置に移動する(S202)。撮像位置は、CADデータ等の設計情報から自動的に算出することができる。検査対象はステージに乗っているため、ステージの移動または回転とともに視野を移動することが可能である。
【0141】
次に、検査対象の視野部分を撮像する(S204)。検査対象の撮像データは、X線源からX線を照射し、X線検出器を露光することで得られる。露光時間は、検査対象のサイズや、X線源の発生するX線の強度から予め決めておくことが可能である。
【0142】
続いて、X線検出器で撮像した画像データを演算部に転送する(S206)。すなわち、撮像画像データを再構成するために、再構成処理を行う演算部に転送する。
【0143】
さらに、続いて、規定枚数撮像したかが判断される(S208)。規定枚数は検査をする前にCADデータ等の設計情報から決めてもよいし、作業者が目視により判断してもよい。規定枚数に達した場合は、CT撮像を終了し(S210)、画像再構成処理(図6のS112)を行う。一方、規定枚数に達していない場合は、処理はステップS202に復帰して、次の撮像位置から視野を撮像するために、再び、撮像系および/または検査対象を移動する。
【0144】
図9は、図8で説明した1視野のCT撮像の処理において、複数方向で撮像を行なう処理のタイミングチャートである。
【0145】
ここでは、たとえば、図5に示すような構成において、1つの円回転機構に取り付けられたX線検出器がS個存在し、これが検出器回転機構により一体的に回転するものとする。ただし、1回の撮像では、1つのX線検出器ごとに撮像が行なわれるものとする。
【0146】
このとき、図9に示すように、X線検出器による1視野のCT撮像時間Tvは、N回の撮像時間Ts(図中、S1,S2,…,SNで示す)と、必要な機械的な移動時間の合計であるから、たとえば、以下の式(14)で表される。
【0147】
検出器がS枚の場合 : Tv = NTs+(N/S-1)Tm
検出器が1枚の場合 : Tv = NTs+(N-1)Tm …(14)
なお、この時、撮像画像のデータ転送は機械的な移動と同時に行うとした。たとえば、1つの検出器を用いて16枚撮像したい場合は、Tv=16Ts+15Tmとなる。
【0148】
(実施の形態1のX線検査装置100の構成および動作)
以下、実施の形態1のX線検査装置100の構成および動作について説明する。
【0149】
実施の形態1のX線検査装置100では、以下に説明するように、視野は、(撮像時に)機械的に移動しない。従って、複数の角度の撮像データを得るためには、X線焦点位置とX線検出器位置を変える必要がある。
【0150】
X線焦点位置の高速移動には、走査型X線源を用いる。なお、後に変形例で説明するように、複数の焦点固定型X線源を用いてもよい。X線検出器23の位置移動については、下記の構成を用いる。
【0151】
1)X線検出器23を少なくとも2つ以上設け、かつ、独立に移動可能なようにX線検出器駆動部22を構成する。
【0152】
2)X線検出器23.1での撮像中に、他のX線検出器23.2を撮像準備のために所定の位置に移動させる。
【0153】
以上により、撮像を行う際には、X線検出器23.2が所定の位置に移動済であるので、X線焦点位置を高速に移動させることにより、機械的な移動の無駄時間を削減することが可能となる。
【0154】
図10は、実施の形態1のX線検査装置100の構成を説明するための図である。なお、図1と同一部分には、同一符号を付しており、かつ、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0155】
図10を参照して、X線検出器駆動部22は、X線検出器23.1および23.2をそれぞれ、XYθの自由度で駆動可能なXYθ動作機構となっており、X線源10としては、走査型X線源が用いられている。
【0156】
図10にしめした構成では、検査対象の位置を動かすために、検査対象位置駆動機構(たとえば、X−Yステージ)と、検査対象位置制御部80とが設けられている。
【0157】
また、図10においては、2つの独立に移動可能なX線検出器を使用しているが、X線検出器が2つ以上設けられていてもよい。
【0158】
X線検出器23.1とX線検出器23.2は、独立にX-Y-θ動作が可能である。なお、後に説明するように、X線検出器23の駆動の仕方によって、θ回転の機構は必ずしも設けられていなくてもかまわない。
【0159】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、X線検出器23の移動・回転を行う。ただし、このようなX−Y方向の移動またはX−Y平面内でのθ回転を可能とする構成であり、X線検出器23の移動に対して同様の機能を持つものであれば、これ以外の機構を用いることも可能である。
【0160】
また、検査対象の視野は、演算部70内の検査対象位置制御部80に制御される検査対象位置駆動機構により、上記X線検出器23.1または23.2とは独立にX−Y動作が可能である。さらに、上述のとおり、X線源10の走査型X線源は、X線焦点位置17をX線ターゲット上の任意の位置へ高速に移動させることが可能である。
【0161】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査X線源制御機構60に命令を送り、後に説明するような検査処理のためのフローチャートで示されるプログラムを実行する。また、入力部40からの入力によって検査装置の動作を制御し、各部の状態、または検査結果を出力部50より出力することができる。
【0162】
検査対象位置制御機構は、アクチュエータと検査対象を固定する機構とを備え、検査対象位置制御部80からの命令によって検査対象を移動させる。
【0163】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と回転軸を持った検出器支持部22.2とを備え、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。
【0164】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0165】
X線源10は、走査X線源制御機構60を通した演算部70からの命令に従って、電子線を発生させ、電子線収束コイル13および偏向ヨーク12とによってターゲット上の指定された位置に電子線を収束させ、X線焦点17を高速に移動させる。
【0166】
図11は、図10に示したX線検査装置100の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0167】
図11(a)に示す動作例1は、図10に示した構成を上から見たものであり、16枚のX線透視画像を等角度から撮像することを想定した動作例1を示すものである。動作例1はFeldkampらよる方法に代表される解析的手法を用いるのに適している。それは、上述したように、通常、解析的手法では投影データにフィルタリング処理を行うが、フィルタリング方向はX線の透過経路の方向に対し垂直方向が望ましいとされている。そのため、解析的手法を用いるためには、X線検出器をX線の透過経路に対し垂直、つまりX線検出器を視野に向かって撮像するのが好ましいからである。
【0168】
図11(b)に動作例2は、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、X線検出器駆動部22の機構の高速化、保守性の向上を図ることができる。
【0169】
図11に示した動作例(移動軌跡)について、さらに詳しく説明すると、以下のとおりである。
【0170】
X線検出器23.1とX線検出器23.2とが独立に動作できる範囲は分かれている。
図11中の位置A1,B1はそれぞれX線検出器23.1および23.2の初期位置とする。位置A1〜A8、位置B1〜B8はそれぞれ画像再構成に必要な透視画像を取得するX線検出器23.1および23.2の位置とする。
【0171】
図11に示した動作例では、X線検出器23.1および23.2は、撮像系の原点を中心とした一定距離で移動する。その結果、撮像系を上から見た場合、それぞれ半円の軌跡を持つ。
【0172】
位置a1、a2、a3、b1、b2はX線ターゲット上の焦点位置であり、それぞれX線検出器位置A1、A2、A3、B1、B2と視野を結ぶ直線状に位置している。
【0173】
撮像を開始するとき、X線検出器23.1および23.2はそれぞれ位置A1、B1で静止しているものとする。
【0174】
i)X線焦点位置a1からX線を発生させ、X線検出器23.1(位置A1)で撮像を行なう。
【0175】
ii)次いでX線焦点位置b1からX線を発生させ、X線検出器23.2(位置B1)で撮像を開始する。位置B1での撮像中に、X線検出器23.1があらかじめ決められた位置A2に移動を開始する。
【0176】
iii)X線検出器23.2(位置B1)での撮像とX線検出器23.1の移動が完了すると、直ちにX線の焦点位置を位置a2に移動させ、X線検出器23.1(位置A2)で撮像をおこなう。この撮像中に、X線検出器23.2はあらかじめ決められた位置B2へ移動する。
【0177】
以上を繰り返すことで、X線検出器の移動時間に伴うX線源の休止時間を削減して画像再構成に必要な撮像枚数を得ることができる。
【0178】
図12は、実施の形態1のX線検査装置100による再構成画像検査のための検査全体のフローチャートを示す図である。
【0179】
図12を参照して、まず、処理が開始されると(S300)、演算部70の検査対象位置制御部80からの命令により、検査対象位置制御機構は、検査対象の検査部分(視野)を撮像可能な位置に移動する(S302)。すなわち、透視画像を撮像するために、検査対象をのせたステージとX線検出器を所定の位置に移動する。通常、検査においては、検査位置の特定のために光学カメラ(図示せず)が搭載されているため、光学カメラの画像をもとに位置を決めることが可能である。その他の方法として、検査対象のCADデータをもとに自動的に決めてもよいし、作業者が目視で行ってもよい。
【0180】
その上で、まずは、透視画像の撮像を行い(S304)、演算部70の良否判定部78は、透視画像を検査して、取得した透視画像から検査対象の視野(透視画像で撮像されている範囲)の良否判定を行う(S306)。良否判定手法は、様々な手法が提案されており、公知のためここでは詳細を記述しない。例えば、もっとも基本的な検査としては、透視画像を一定の値で2値化し、CADデータ等の設計情報と比較し、透視画像上の所定の位置に部品があるかないかを面積により判断する。
【0181】
続いて、演算部70は、再構成画像による検査が必要か否かを判断する(S308)。判断の基準は、CADデータ等の設計情報をもとに予め設定しておくことができるし、透視画像の良否判定結果から判断することも可能である。例えば、実装基板の検査において、片面にのみ部品が実装されている場合、透視画像で良否判定することが可能なため再構成画像による良否判定を行う必要がない場合もある。
【0182】
演算部70は、再構成画像による検査が必要ない場合には、検査を終了させる(S318)。
【0183】
一方、演算部70は、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行わせる(S310)。CT撮像においては、検査対象内の視野(再構成領域もしくは、上記の透視画像撮像範囲と同様の領域)を複数の方向から撮像する。CT撮像の詳しい説明は、後述する。
【0184】
次に、演算部70の3D画像再構成部76は、複数方向の撮像画像から再構成画像を生成する(S312)。再構成処理は、様々な方法が提案されており、たとえば、上述したFeldkamp法を用いることができる。
【0185】
続けて、演算部70の良否判定部78は、再構成画像による良否判定を行う(S314)。良否判定の方法は、3次元データを直接用いる方法や2次元データ(断層画像)、1次元データ(プロファイル)を用いる等の方法が考えられる。これらの良否判定手法は周知であるため検査項目に適した良否判定手法を用いればよく、ここでは詳細の説明は繰り返さない。以下に、良否判定の1例について説明する。まず、3次元再構成画像に一定の値で2値化する。CADデータ等の設計情報から、再構成画像内で部品(たとえば、BGAの半田ボール)のある位置を特定する。2値化画像から部品のある位置に隣接した画素の体積を計算し、部品のあるなしを判断することができる。
【0186】
さらに、演算部70は、全視野の検査を終了したか否かを判断し(S316)、終了していない場合は、処理を、ステップS102に復帰させる。一方で、演算部70は、全視野について検査が終了していれば、本検査を終了させる(S318)。
【0187】
なお、図12中では、透視画像と再構成画像で検査を行っているが、透視画像による検査を行わずに、再構成画像による検査のみを行うことも可能である。ただし、通常、再構成処理は比較的時間がかかるため、再構成画像による検査の前に、透視画像で良否判定をすることで全体の検査時間を短くすることができる。
【0188】
図13は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0189】
また、図14は、図13に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0190】
なお、図13において、フローチャートが3つに分岐した部分については、左の行はX線源の動作、中央の行はX線検出器23.1の動作、右の行はX線検出器23.2の動作を表しており、横方向に並んだ処理は同時におこなわれていることを表す。
【0191】
以下、図13および図14を参照して、まず、1視野のCT撮像処理が開始されると(S400)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象を移動させる。さらに、演算部70は、X線検出器23も、初期位置に、移動しておく。X線検出器23の位置や検査対象の位置は、X線検出器駆動部22や検査対象位置駆動機構(たとえば、X−Yステージ)に搭載されているエンコーダを用いて設定してもよいし、汎用的な検出器(レーザー変位計等)を用いて、設定してもよい。
【0192】
続いて、演算部70は、X線焦点をX線検出器23.1に対応する位置に移動してX線を照射し(S402)、X線検出器23.1で撮像する(S412)。X線焦点位置の設定は上記の方法でよい。撮像時間(検出器の露光時間)は予め設定しておいてもよいし、ユーザが目視により所望の時間に設定することもできる。並行して、演算部70は、X線検出器23.2を次の撮像位置に移動させるとともに、X線検出器23.1による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S422)。
【0193】
次に、演算部70は、X線焦点をX線検出器23.2に対応する位置に移動してX線を照射し(S404)、X線検出器23.2で撮像する(S424)。並行して、演算部70は、X線検出器23.1を次の撮像位置に移動させるとともに、X線検出器23.2による撮像データを、3D画像再構成部78での再構成処理のために、メモリ90に転送する(S414)。
【0194】
続いて、演算部70は、撮像が規定枚数に達したかを判定する(S430)。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS402,412,422に復帰する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S432)、処理をステップS312に移行させる。
【0195】
なお、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、データ転送と同時に撮像枚数の判断を行うのが好ましい。なぜならば、データ転送には、たとえば、200ms程度の時間がかかるため、次の撮像位置への移動が遅くなる。そのため、撮像する度に遅延が発生することになってしまう。この遅延時間を短縮し高速化を図るために、データ転送と行うと同時に、規定枚数の判断と検査対象・X線検出器の移動を行うことが好ましい。
【0196】
さらに、図14に示すように、実施の形態1の撮像方式を用いた場合、1視野の撮像時間は、以下の式(15)および式(16)で表すことができる。
【0197】
Ts > Tm の場合: Tv = NTs …(15)
Ts < Tm の場合: Tv = Ts +(N - 1)Tm …(16)
なお、各記号の意味は以下のとおりである
N :撮像枚数(X線検出器の数の整数倍)
Tv:1つの視野を撮像する時間
Tm:移動機構(ステージ・X線検出器)が移動する時間
Ts:撮像(X線検出器の露光)時間
なお、撮像枚数Nについては、以後の説明のわかりやすさのためにX線検出器の数の整数倍としているが、必ずしも整数倍に限定されるわけではない。
【0198】
図14では、Ts < Tm の場合を示している。
画像の再構成に必要な透視画像の撮像枚数を16枚と仮定し、実施の形態1の撮像方式を用いたとき、再構成に必要な枚数=16枚の画像を得るためにかかる時間は、Ts>Tmの場合には16Ts、Ts<tmの場合にはTs+15Tmとなり、どちらの場合でも、図9で説明した方式を用いて1つの検出器を使用した場合の(16Ts+15Tm)と比較して撮像時間を短縮することが可能である。
【0199】
なお、X線源のX線の強度が向上、X線検出器の高感度化が進展すると、撮像に必要なX線検出器の露光時間が短くなる。従って、あるX線検出器撮像中に、別のX線検出器を所定の撮像位置に移動させるためには、高速なメカ機構が必要となり、場合によっては、あるX線検出器の撮像が終わっても、X線検出器の移動が完了していない場合がある。
【0200】
しかし、いずれにしても、あるX線検出器撮像処理中に、別のX線検出器を所定の撮像位置に移動処理または当該移動させるX線検出器の撮像データの転送処理を並行して行うことで、全体としての処理時間を短縮できる。また、このような並行処理を1視野分の処理全体で繰り返し実行することで、1視野分の処理時間を短縮できる。
【0201】
[実施の形態1の変形例]
図15は、実施の形態1の変形例のX線検査装置102の構成を説明する図である。X線検査装置102は、直線移動型のX線検出器とX線源10として走査型X線源とを用いている。
【0202】
すなわち、X線検査装置102において、3つのX線検出器23.1,23.2および23.3は、それぞれ独立にY移動およびθ回転可能である。図15では、X線検出器支持部22.3が自転可能、かつ、レール状をY方向に移動可能なX線検出器駆動部22の動作機構を示している。ただし、同様の機能を持つものであれば、図15に示す以外の機構でも問題ない。また、後に説明するように、自転機構は必須ではない。
【0203】
X線源10である走査型X線源は、X線焦点位置をX線ターゲット上の任意の位置へ高速に移動させることができる。
【0204】
その他、図1、図10と同一部分には、同一符号を付している。また、図15においても、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0205】
図15においては、3つの独立に移動可能なX線検出器を使用しているが、X線検出器の個数としては、2個以上であればよい。なお、X線検出器の個数が奇数の場合には、以下に説明する利点があるので、X線検出器が3つ以上の奇数個設けられていることがより望ましい。すなわち、奇数個X線検出器を設けることにより、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能となる。これは、たとえば、図12で説明したフローチャートに従って動作する場合に、透視画像を撮影するのに好適である。ただし、検出器の個数と移動機構の個数を最低限に抑えるという点で、コストの観点からは、3個が望ましい。
【0206】
図15に示した構成においては、X線検出器駆動部22は、レール状をY方向にX線検出器を移動可能であり自転軸について自転可能な検出器支持部22.3を備え、X線検出器23の移動・回転を行う。
【0207】
また、図10に示した構成と同様に、検査対象の視野は、演算部70内の検査対象位置制御部80に制御される検査対象位置駆動機構(検査対象が乗っているX−Yステージ等)により、検査対象の視野は、上記X線検出器23.1,23.2および23.3とは独立にX−Y動作が可能である。さらに、上述のとおり、X線源10の走査型X線源は、X線焦点位置17をX線ターゲット上の任意の位置へ高速に移動させることが可能である。
【0208】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査X線源制御機構60に命令を送り、後に説明するような検査処理のためのフローチャートで示されるプログラムを実行する。また、入力部40からの入力によって検査装置の動作を制御し、各部の状態、または検査結果を出力部50より出力することができる。
【0209】
検査対象位置制御機構は、アクチュエータと検査対象を固定する機構とを備え、検査対象位置制御部80からの命令によって検査対象を移動させる。
【0210】
X線検出器駆動部22は、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。
【0211】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0212】
X線源10は、走査X線源制御機構60を通した演算部70からの命令に従って、電子線を発生させ、電子線収束コイル13および偏向ヨーク12とによってターゲット上の指定された位置に電子線を収束させ、X線焦点17を高速に移動させる。
【0213】
図16は、図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0214】
図16に示す動作例1は、図15の構成を上から見たものであり、18枚のX線透視画像を異なる角度から撮像することを想定した動作例である。
【0215】
図16においては、上述のとおり、X線検出器23.1,23.2および23.3は、それぞれレール上を直線的に移動できる機構を有する。さらに、X線検出器23.1,23.2および23.3は、それぞれX線検出器の中心を中心として自転することができる回転機構を有する。
【0216】
X線源10は、走査型X線源である。また、X線検出器23の撮像位置は、図16の配置に限定されるものではなく、等間隔の角度になるようにしてもよい。さらに、撮像枚数は18枚に限定されるものではなく、検査可能な撮像枚数を指定すればよい。撮像枚数の指定は、CADデータ等の設計情報から計算してもよいし、作業者が目視で決めてもよい。
【0217】
図16において、位置A1〜A6、B1〜B6、C1〜C6は、それぞれ画像再構成に必要な透視画像を取得するX線検出器23.1,23.2および23.3の位置である。位置に付された1〜6の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA6の位置で撮像する。
【0218】
また、位置a1、a2、b1、b2、c1、c2はX線ターゲット上の焦点位置であり、X線検出器位置が、それぞれ、位置A1、A2、B1、B2、C1、C2にある時に対応する。
【0219】
図16の動作例1はFeldkampの方法に代表される解析的手法を用いるのに適している。図11(a)の場合と同様に、通常、解析的手法では投影データにフィルタリング処理を行うが、フィルタリング方向はX線の透過経路の方向に対し垂直方向が望ましいとされている。そのため、解析的手法を用いるためには、X線検出器をX線の透過経路に対し垂直、つまりX線検出器を視野に向かって撮像するのが好ましいからである。
【0220】
図17は、図15に示したX線検査装置102の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図として示す図である。
【0221】
図17に示す動作例2では、X線検出器23は、自転をせず、X−Y平面内を平行に移動している。このような動作例2は、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。
【0222】
この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0223】
図18は、図16または図17のように、X線検出器23を移動させて検査する際の検査のフローチャートを示す図である。
【0224】
検査全体のフローは、図12に示したものと同様であるので、図18では、図12のステップS310の1視野のCT撮像の部分を示す。
【0225】
図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。なお、図18フローチャートの4つに分岐した部分について、一番左の行はX線源の動作、中央左よりの行はX線検出器23.1の動作、中央右よりの行はX線検出器23.2の動作、一番右の行はX線検出器23.3の動作を表しており、横方向に並んだ処理は同時におこなわれていることをあらわす。
【0226】
また、図19は、図18に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0227】
以下、図18および図19を参照して、まず、1視野のCT撮像処理が開始されると(S500)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象を移動させる。さらに、演算部70は、X線検出器23も、初期位置に、移動しておく。X線検出器23の位置や検査対象の位置の位置は、X線検出器駆動部22や検査対象位置駆動機構(たとえば、X−Yステージ)に搭載されているエンコーダを用いて設定してもよいし、汎用的な検出器(レーザー変位計等)を用いて、設定してもよい。
【0228】
したがって、図19のタイミングチャートにおいては、X線検出器23.1,23.2および23.3は、それぞれ、初期位置A1,B1,C1にある状態からスタートするものとする。
【0229】
続いて、演算部70は、X線焦点をX線検出器23.1に対応する位置に移動してX線を照射し(S502)、X線検出器23.1で撮像する(S512)。X線焦点位置の設定は上記の方法でよい。撮像時間(X線検出器の露光時間)の設定は、実施の形態1と同様である。
【0230】
次に、演算部70は、X線焦点をX線検出器23.1を3回後に撮像する位置まで移動させるとともに、X線検出器23.1による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S514)。
【0231】
並行して、演算部70は、X線焦点をX線検出器23.2に対応する位置に移動してX線を照射し(S504)、X線検出器23.2で撮像する(S524)。次に、演算部70は、X線焦点をX線検出器23.2をさらに3回後に撮像する位置まで移動させるとともに、X線検出器23.2による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S526)。
【0232】
並行して、演算部70は、X線焦点をX線検出器23.3に対応する位置に移動してX線を照射し(S506)、X線検出器23.3で撮像する(S534)。
【0233】
演算部70は、撮像が規定枚数に達しているか否かを判断し(S540)、達していなければ、処理をステップS532に復帰させる。
【0234】
次に、演算部70は、X線焦点をX線検出器23.3をさらに3回後に撮像する位置まで移動させるとともに、X線検出器23.3による撮像データを、3D画像再構成部78での再構成処理のために、メモリ90に転送する(S532)。
【0235】
以下、同様にして、規定枚数の撮像が終了するまで、処理が繰り返される。
さらに、最後に、X線検出器23.3での撮像が終了すると、X線検出器23.3による撮像データを、3D画像再構成部78での再構成処理のために、メモリ90に転送する(S514)。
【0236】
演算部70は、撮像した枚数が、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S542)、処理をステップS312に移行させる。
【0237】
なお、図18のフローチャート上では、フローの説明の便宜上、演算部70は、データ転送後に規定枚数撮像したかの判断を行っているように記載しているが、実際には、データ転送と同時に撮像枚数の判断を行っている。
【0238】
また、図19のタイミングチャートに示されるように、撮像時間と検出器の移動にかかる時間をそれぞれTs、Tmとすると、以下のようになる。
【0239】
2Ts=>Tmの時 : Tv=NTs
2Ts<Tmの時 : Tv=(N/3−1)(Ts+Tm)+3Ts
なお、各記号の意味は以下のとおりである
N :撮像枚数(X線検出器の数の整数倍)
Tv:1つの視野を撮像する時間
Tm:移動機構(ステージ・X線検出器)が移動する時間
Ts:撮像(X線検出器の露光)時間
なお、撮像枚数Nについては、以後の説明のわかりやすさのためにX線検出器の数の整数倍としているが、必ずしも整数倍に限定されるわけではない。
【0240】
ここで、画像の再構成に必要な透視画像の撮像枚数を18枚と仮定し、図15に示したX線検査装置102の撮像方式(3つのX線検出器を交互に使用)を用いたとき、再構成に必要な枚数の18枚の画像を得るためにかかる時間は、2Ts>Tmの場合には18Ts、2Ts<tmの場合には8ts+5tmとなり、どちらの場合でも、1つの検出器を使用した場合の(16Ts+15Tm)と比較して撮像時間を短縮することが可能である。さらに、図9に示した方式において、3つのX線検出器を用いた場合のTv = NTs+(N/S-1)Tm= 18Ts+5Tm よりも高速である。
【0241】
実施の形態1の変形例では、実施の形態1と同様に、撮像時間の短縮にあたり、大きく重いX線源ではなく、比較的に高速に移動可能な、X線検出器と検査対象とを移動させる。さらに、各構成要素の移動を直線という簡素な機械的機構にすることで、X線検出器が所定位置まで移動する距離が短くなる上、移動速度が大きくなるため、機械的な移動時間が短縮され、高速な検査を実現することが可能となる。
【0242】
[実施の形態2]
実施の形態1の変形例のX線検査装置102は、直線移動型のX線検出器とX線源10として走査型X線源とを用いる構成であった。
【0243】
実施の形態2のX線検査装置104は、X線源10として走査型X線源の代わりに、複数の固定焦点型のX線源を用いる。
【0244】
図20は、このような実施の形態2のX線検査装置104の構成を説明する図である。
X線検査装置104では、X線検出器23が、X線検出器23.1〜23.3の3個設けられていることに対応して、X線源10として3個の固定焦点型のX線源が設けられている。
【0245】
そして、これら3個の固定焦点型のX線源から同時に検査対象の同一視野に対してX線が照射される。この際に、1つのX線検出器に対してX線を入射させるべきX線源からのX線が他のX線検出器に入射することがないように、遮蔽体66が設けられるとともに、X線源の制御のためには、走査X線源制御機構60の代わりに、X線源制御機構64が設けられている。X線源制御機構64は、電子ビームの偏向制御を行なわず、代わりに、3つのX線源を同時に制御する点で、走査型X線源制御機構60と異なる。
【0246】
なお、図15のX線検査装置102の場合と同様に、X線検出器が5つ以上の奇数個設けられていてもよい。奇数個X線検出器を設けることにより、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能となる。これは、たとえば、図12で説明したフローチャートに従って動作する場合に、透視画像を撮影するのに好適である。
【0247】
X線検出器23.1〜23.3を駆動する機構については、基本的には、図15で説明した実施の形態1の変形例のX線検査装置102と同様である。ただし、X線検査装置104では、以下に説明するように、X線検出器23.1〜23.3の移動の態様が、図15で説明したX線検査装置102とは異なる。
【0248】
もっとも、実施の形態2のX線検査装置104でも、実施の形態1の変形例のX線検査装置102と同様に、各構成要素の移動を直線という簡素な機械的機構にすることで、X線検出器が所定位置まで移動する距離が短くなる上、移動速度が大きくなるため、機械的な移動時間が短縮され、高速な検査を実現することが可能となる。
【0249】
図21は、遮蔽体66の上面図である。上述したように、X線検出器23が3個設けられていることに対応して、3つの開口部が設けられ、かつ、3つのX線源が同時に動作した場合に、1つのX線検出器に対してX線を入射させるべきX線源からのX線が、他のX線検出器に入射することがない位置に設置される。
【0250】
遮蔽体66は十分にX線を遮蔽する材質、厚さで作成されており、鉛等が好ましい。X線検出器は直線移動のため、遮蔽体の開口部は矩形(もしくはスリット)となる。また、遮蔽体66のサイズは、X線源CAのX線がX線検出器CCに入らない程度の大きさである。
【0251】
遮蔽体66の開口部のサイズは、X線源CAのX線がX線検出器23.1に十分入る大きさであるが、X線検出器23.2へのX線は遮蔽される程度の大きさである。
【0252】
図22は、図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0253】
図22に示す動作例1は、図20の構成を上から見たものであり、18枚のX線透視画像を異なる角度から撮像することを想定した動作例である。
【0254】
図22においては、上述のとおり、X線検出器23.1,23.2および23.3は、それぞれレール上を直線的に移動できる機構を有する。さらに、X線検出器23.1,23.2および23.3は、それぞれX線検出器の中心を中心として自転することができる回転機構を有する。
【0255】
上述のとおり、X線源10は、走査型X線源でなく、複数、たとえば3個の固定焦点のX線源からなる撮像系である。
【0256】
図15のX線検査装置102とは異なり、X線検出器23.1,23.2および23.3は、一体的に直線動作を行う。
【0257】
3つのX線源からのX線により、X線検出器23.1,23.2および23.3によって同時撮像された後は、X線検出器23.1,23.2および23.3が一体となって、次の撮像位置に直線移動を行う。また、再構成領域が同じになるように、X線検出器23.1,23.2および23.3と同期させて検査対象を位置T1から位置T6まで移動する。
【0258】
さらに、撮像枚数は18枚に限定されるものではなく、検査可能な撮像枚数を指定すればよい。撮像枚数の指定は、CADデータ等の設計情報から計算してもよいし、作業者が目視で決めてもよい。
【0259】
図22において、位置A1〜A6、B1〜B6、C1〜C6は、それぞれ画像再構成に必要な透視画像を取得するX線検出器23.1,23.2および23.3の位置である。位置に付された1〜6の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA6の位置で撮像する。
【0260】
また、位置Sa、Sb、ScはX線源CA、CB、CCそれぞれの焦点位置である。
図22の動作例1も、実施の形態1と同様の理由で、Feldkampの方法に代表される解析的手法を用いるのに適している。
【0261】
図23は、図20に示したX線検査装置104の構成において、X線検出器23と走査型X線源との他の移動軌跡を上面図として示す図である。
【0262】
図23に示す動作例2では、X線検出器23は、自転をせず、X−Y平面内を平行に移動している。このような動作例2は、実施の形態1と同様の理由で、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。
【0263】
この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0264】
なお、ここで、X線焦点の位置とX線検出器の位置関係について説明しておく。
CT再構成する視野の中心を原点とした時、視野の中心からX線焦点までの距離をLf、視野の中心からX線検出器の中心までの距離をLsとすると、以下の関係式が成り立つ。
【0265】
Ls = - Lf × (M - 1)
符号が負なのは、向きが反対であることを表す。ただし、Mは拡大率を示し、拡大率は以下の式で表される。
【0266】
M = Hs / Ho
ただし、HsはX線焦点からX線検出器までの高さ、HoはX線焦点から視野の中心までの高さを表す。この関係自体は、他の実施の形態でも同様に成り立つ。
【0267】
図24は、図22または図23のように、X線検出器23を移動させて検査する際の検査のフローチャートを示す図である。
【0268】
ここでも、検査全体のフローは、図12に示したものと同様であるので、図24では、図12のステップS310の1視野のCT撮像の部分を示す。
【0269】
したがって、図24は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0270】
また、図25は、図24に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0271】
以下、図24および図25を参照して、まず、1視野のCT撮像処理が開始されると(S600)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象をX−Y平面内で移動させる。さらに、演算部70は、X線検出器23.1,23.2および23.3も、初期位置に、直線移動させる(S602)。
【0272】
続いて、演算部70は、X線焦点Fa、Fb、FcからX線を、X線検出器23.1,23.2および23.3のそれぞれに同時に照射し、X線検出器23.1,23.2および23.3で同時に撮像する(S604)。撮像時間(X線検出器の露光時間)は予め設定しておいてもよいし、ユーザが目視により所望の時間に設定することもできる。
【0273】
続いて、演算部70は、X線検出器23.1,23.2および23.3を次の撮像位置に移動させるとともに、X線検出器23.1,23.2および23.3による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S606)。
【0274】
次に、演算部70は、撮像が規定枚数に達したかを判定する(S608)。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS602に復帰する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S610)、処理をステップS312に移行させる。
【0275】
なお、ここでも、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、実施の形態1と同様の理由で、データ転送と同時に撮像枚数の判断を行うのが好ましい。
【0276】
さらに、図25に示すように、実施の形態2の撮像方式を用いた場合の、1視野の撮像時間についてさらに説明する。
【0277】
一般的には、以下の式が成り立つ。
Tv=(N/S)Ts+(N/S―1)Tt
記号の定義は以下に示す。
【0278】
Tv:1つの視野を撮像する時間
Tm:同一視野内で撮像位置(ステージ・X線検出器)を移動する時間
Ts:撮像(X線検出器の露光)時間
Tt:撮像データ転送時間
また、X線検出器を直線移動させることにより、X線検出器の移動時間は短縮され、視野の移動距離はX線検出器の移動と比べ大変短い(拡大率に反比例するため通常10分の1程度)ため、Tm < Ttとする。
【0279】
以下の説明では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像として18枚の撮像を行うとする。
【0280】
1視野のCT撮像時間については、マルチX線源の場合、一度の撮像で同時に3枚の撮像画像を取得することができる。そのため、1視野のCT撮像時間Tvは、6回の撮像を行い、5回の撮像データ転送時間の合計であるから、以下の式(17)で表される。この時、撮像画像のデータ転送は、X線検出器23および検査対象の機械的な移動と同時に行うとした。
【0281】
Tv = 6Ts + 5Tt …(17)
したがって、上述した1つの検出器を使用した場合の(16Ts+15Tm)と比較して撮像時間を短縮することが可能である。
【0282】
なお、X線源のX線の強度が向上、X線検出器の高感度化が進展すると、撮像に必要なX線検出器の露光時間が短くなるので、CT手法としては、Feldkampの方法ではなく、反復的手法が好ましい点については、同様である。
【0283】
[実施の形態3]
以上の説明では、実施の形態1または実施の形態2において、X線検出器駆動部22の構成により、主として、1つの視野についてのCT撮像におけるX線検出器23と検査対象の移動時間の観点から、検査時間を短縮できる効果について説明した。
【0284】
次に、実施の形態3では、同一の検査対象の複数の視野(検査部分)に対して、検査を順次行なう場合の検査時間の短縮について説明する。
【0285】
(視野(検査対象)またはX線検出器が回転して撮像する場合の問題点)
解析的手法を使った撮像系を考えた場合、X線検出器の向きは、再構成のためのフィルタ処理の関係から再構成領域の中心とする円軌道に沿ったものが好ましい。
【0286】
そのため、複数角度からの撮像のためのX線検出器の移動については、i)再構成部分を中心とした円軌道で移動する、ii)X−Y−θステージで移動する等が考えられる。このため、機構が複雑となり、X線検出器やステージの移動の高速化にあたってはコストが相対的に高くなる傾向にある。
【0287】
さらに、検査に用いる断層画像は矩形であることが好ましい。なぜならば、検査アルゴリズムは画像が矩形であることを前提として設計されているためである。さらに、検査対象は1度のCT撮像で得られる再構成領域(視野)より広いため、視野分割を行って複数視野をつなぎ合わせて広い領域とするため、矩形の視野をつなぎ合わせることで効率よく検査対象を包含できるためである。
【0288】
図26は、解析的手法を用いて、画像再構成を行なうために、視野(検査対象)またはX線検出器が回転して撮像した場合において、1つの視野についてのCT撮像により検査領域とできる領域を説明するための概念図である。
【0289】
解析的手法を使って再構成を行うと再構成像のある断面において、検査で使える領域は円となる。これは、たとえば、解析的アルゴリズムでは、上述したような逆投影とよばれる手法をもちいるために、各撮像位置においてX線検出器で検出された画像を逆投影すると、有効に逆投影される領域が円となるからである。このとき、解析的手法で得られた円形の再構成領域から矩形部分を切り取ると、1つの視野面積が小さくなり、広い検査領域を検査するのに時間を要する。
【0290】
再構成領域(視野)の形状は、矩形のX線検出器で撮像された画像が重なる部分である。視野(検査対象)が回転する撮像系では、矩形が複数の角度から重なるため円形となる。検査アルゴリズムを適用できる領域が矩形のため、再構成領域が円形であると、円内部の矩形部分のみが検査可能であり、一度に検査できる範囲は円に内接する矩形となる。
【0291】
たとえば、X線検出器で撮像できる視野の断面の1辺の長さを2Lとすると、再構成される領域は半径がLの円となる。この円に内接する正方形は、1辺の長さが√2Lの正方形となる。この正方形が検査できる領域である。よって、従来の撮像系における検査可能な領域の面積は、2L2となる。
【0292】
そのため、従来の撮像系で再構成した画像はX線検出器で撮像した画像データの一部のみを利用していることとなる。そのため、1つの視野の大きさが小さくなり、多くの数の視野を撮像する必要がある。
【0293】
さらに、インライン検査のための高速化という観点では、CT撮像の撮像枚数は少ないほど高速化が図れる。しかし、解析的手法では、少ない撮像枚数の場合、アーチファクト等の多くのノイズが発生し、検査に使用する画像としては不適切であるという問題がある。
【0294】
ここで、たとえば、図3に示したようなX線検出器とX線源の配置で、すなわち、X線源とX線検出器が固定で、視野が機械的に移動(回転)することで、再構成に必要な複数の撮像枚数を得る場合には、検査全体に要する時間を検討すると以下のようになる。
【0295】
図27は、視野(検査対象)が回転する従来の撮像系のタイミングチャートである。
なお、検査全体のフローは、たとえば、図6で説明したものと同様である。
【0296】
以下の説明では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号については、上述した定義と同様である。
【0297】
検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回のメカ移動時間の合計であるから、数式 1で表される。
【0298】
Ti = M(Tv + Te) …(18)
次に、図28は、1視野のCT撮像時間について説明する図である。図28を参照すると、1視野のCT撮像時間Tvは、N回の撮像を行い、N回のメカ移動時間の合計であるから、以下の式(19)で表される。この時、撮像画像のデータ転送はメカ移動と同時に行うとした。
【0299】
Tv = NTs + (N − 1)Tm …(19)
(実施の形態3のX線検査装置106の構成)
以下に説明するように、実施の形態3のX線検査装置106では、まず第1に、X線検出器23を平行配置した上で、反復的手法を用いることにより、X線検出器の円軌道の制約を外し、高速化を図る。第2に、X線検査装置106では、X線検出器23を平行配置した上で、反復的手法を用いることにより、有効矩形領域を大きくし、視野分割数を少なくすることでシステムの高速化を図る。第3には、反復的手法を用いることにより、少ない撮像枚数からでも高精度な再構成画像を生成することで、システムの高速化を図るものである。
【0300】
すなわち、X線検査装置106では、X線検出器23は1個以上で、検査対象の各検査領域(視野)として必要とされる矩形領域に平行配置される。X線検出器23は、X線検出器の検出面と同一平面内を平行移動する。画像再構成のための再構成手法は反復的手法を使用するというものである。
【0301】
ここで、X線源10としてのX線源は、走査型X線源でなくともよい。固定焦点X線源1個でもよいし、複数のX線源でもかまわない。
【0302】
図29は、このような実施の形態3のX線検査装置106の構成を説明する図である。
なお、図1と同一部分には、同一符号を付しており、かつ、X線焦点位置の制御、X線検出器位置の制御、検査対象位置の制御等に直接関係のある部分のうち説明に必要な部分を抜き出して記載している。
【0303】
図29を参照して、X線検出器駆動部22は、X線検出器23.1を、X−Y平面内で平行駆動可能なロボットアームを備えている。なお、図29の例では、X線源10としては、固定焦点型X線源が用いられている。
【0304】
図29にしめした構成では、検査対象の位置をX線検出器23.1とは独立にX−Y平面内で動かすために、検査対象位置駆動機構(たとえば、X−Yステージ)と、検査対象位置制御部80とが設けられている。
【0305】
X線検出器駆動部22は、直交タイプの2軸のロボットアーム22.1と検出器支持部22.2とを備え、検出器駆動制御部32を通して、演算部70からの命令によってX線検出器23を指定された位置に移動させる。また、検出器駆動制御部32は、その時点でのX線検出器23の位置情報を演算部70に送る。ただし、このようなX−Y方向の移動を可能とする構成であり、X線検出器23の移動に対して同様の機能を持つものであれば、これ以外の機構を用いることも可能である。
【0306】
演算部70は、検出器駆動制御部32、画像データ取得部(X線検出器コントローラ)34、走査X線源制御機構60に命令を送り、後に説明するような検査処理のためのプログラムを実行する。
【0307】
検査対象位置制御機構は、アクチュエータと検査対象を固定する機構とを備え、検査対象位置制御部80からの命令によって検査対象を移動させる。
【0308】
演算部70は、検出器駆動制御部32を通した命令により指示されるタイミングでX線透視画像の取得と撮像データの転送を行う。
【0309】
図30は、図29に示したX線検査装置106の構成において、X線検出器23と検査対象の視野との移動軌跡を上面図として示す図である。
【0310】
図30に示す動作例1は、図29に示した構成を上から見たものであり、16枚のX線透視画像を等角度から撮像することを想定した動作例を示すものである。この動作例は、上述のとおり、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。これは、反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。
【0311】
この動作の場合、X線検出器23を自転する必要がないため、X線検出器駆動部22の構成を簡略化でき、メカ機構の高速化、保守性の向上を図ることもできる。
【0312】
X線検出器23.1は、X線源の焦点17を原点とした一定距離で移動する。その結果撮像系を上から見た場合、X線検出器23.1の中心の軌跡は円となる。
【0313】
図30中で、位置T1、T2は視野の位置であり、それぞれX線検出器位置S1、S2に対応している。
【0314】
図31は、平行移動検出器を用いた撮像系のCT撮像フローチャートである。
ここでも、検査全体のフローは、図12に示したものと同様であるので、図31では、図12のステップS310の1視野のCT撮像の部分を示す。
【0315】
したがって、図31は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0316】
まず、1視野のCT撮像処理が開始されると(S700)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象をX−Y平面内で移動させる。さらに、演算部70は、X線検出器23.1も、初期位置に、移動させる(S702)。撮像位置は、CADデータ等の設計情報から自動的に算出することができる。検査対象はステージに乗っているため、ステージの移動とともに視野を移動することが可能である。
【0317】
続いて、演算部70は、X線焦点17からX線を、X線検出器23.1に照射し、X線検出器23.1で撮像する(S704)。撮像時間(X線検出器の露光時間)は予め設定しておいてもよいし、ユーザが目視により所望の時間に設定することもできる。
【0318】
続いて、演算部70は、X線検出器23.1を次の撮像位置に移動させるとともに、X線検出器23.1による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S706)。
【0319】
次に、演算部70は、撮像が規定枚数に達したかを判定する(S708)。規定枚数は検査をする前にCADデータ等の設計情報から決めてもよいし、作業者が目視により判断してもよい。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS702に復帰する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S710)、処理をステップS312に移行させる。
【0320】
なお、ここでも、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、実施の形態1と同様の理由で、データ転送と同時に撮像枚数の判断を行うのが好ましい。
【0321】
図32は、平行移動X線検出器を用いた撮像系の検査領域を示す概念図である。
再構成領域(視野)の形状は、矩形のX線検出器で撮像された画像が重なる部分である。図26の撮像系では、矩形が複数の角度から重なるため円形となるが、図32では、X線検出器が全て同一方向を向いているため、重なる部分は矩形となる。
【0322】
再構成領域が円形の場合、検査アルゴリズムを適用できる領域が矩形のため、円内部の矩形部分のみが使用可能であり、一度に検査できる範囲が小さい。一方、図32に示す場合、再構成領域は矩形のため、再構成領域内の検査可能な範囲が比較的広い。そのため、総撮像枚数を少なくすることができることから、検査時間を短縮することが可能となる。さらに、矩形を隙間なく並べるのは、円形を隙間なく並べるよりも数が少ない。つまり、総撮像枚数が少なくなるため、検査時間を短縮することが可能となる。
【0323】
X線検出器で撮像できる視野の断面の1辺の長さを2Lとすると、再構成される領域は1辺の長さが2Lの成功形となる。よって、図32のように検査領域が配置される場合、検査可能な領域の面積は4L2となる。図26の撮像系における検査可能な領域の面積は2L2であったから、1視野において従来の撮像系よりも2倍の面積の領域を検査することが可能である。つまり、視野の分割個数を半分にすることができる。
【0324】
上記の効果は、X線検出器が平行移動すれば、直線移動であっても、複数のX線検出器であってもよい。もちろん、X線源が固定焦点X線源であっても、走査型X線源であってもよい。
【0325】
図33は、平行移動X線検出器を用いた撮像系のタイミングチャートである。
以下の説明では、撮像系において検査対象をM個の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は上述のとおりである。
【0326】
図29のX線検査装置106では、図26で説明したような撮像系に対し、視野の分割個数を半分にすることができるため、視野の数はM/2となる。
【0327】
検査対象全体のCT撮像時間Tiは、M/2個の視野を撮像し、M/2回の機械的移動時間の合計であるから、式(20)で表される。
【0328】
Ti = M/2(Tv + Te) …(20)
以上説明したとおり、実施の形態3のX線検査装置では、CT再構成に用いる撮像する際に、X線検出器の移動する範囲が同一平面内で撮像され、X線検出器の向きは同一方向とされる。そして、X線検出器および検査対象(ステージ)の移動モードをX−Yの2軸に限定することにより、移動手段の機構を簡素化し、移動速度の高速化が図られる。さらに、X線検出器と検査対象を相対的に平行移動させることで、CT再構成される視野を矩形にし、自動検査に有効な範囲を広げることにより、自動検査システムの高速化が図られる。
【0329】
[実施の形態4]
以上説明した実施の形態1〜3では、X線検出器23または検査対象を機械的に移動させる時間による検査時間のロスを低減することが可能なX線検査装置について説明した。
【0330】
実施の形態4では、X線源をパルス駆動することによる検査時間の短縮について説明する。
【0331】
すなわち、高速撮像を行うためにはX線の強度はできるだけ強い方がよい。しかしながら、X線強度を上げるために電子ビームの電流を大きくすると、ターゲットが電子ビームの衝突による熱損傷を受ける。そのため、電子ビームの電流を大きくした場合、熱損傷を受けるおそれのある温度に達するまでの短い時間しかターゲットに電子ビームを当てることができない。実施の形態4のX線検査装置では、以下に説明するように、"複数のX線検出器"と"焦点走査型X線源"を用いて、熱課題を解決してX線強度をあげることにより高速撮像を図るものである。
(複数のX線検出器と走査型X線源とを用いてCT撮像する場合の問題点)
以下では、実施の形態4のX線検出装置の構成および動作を説明するための前提として、複数のX線検出器と走査型X線源とを用いてCT撮像する場合の問題点について説明する。
【0332】
図34は、4つの検出器と走査型X線源を使用した撮像を行なうX線検査装置の構成を示す図である。なお、図1と同一部分には、同一符号を付すほか、図34では、説明に直接必要となる部分以外については、図示省略している。
【0333】
図34に示すX線検査装置900は、走査型X線源と、4つのX線検出器23.1〜23.4を用いて構成される。
【0334】
X線検出器23.1〜23.4は、検出器駆動機構22に固定されている。図34では16枚の撮像を想定しているため、検出器駆動機構22は撮像に伴って位置1から位置4まで回転する。
【0335】
検査対象中の視野は、検査対象位置制御機構により、X線検出器23.1〜23.4、X線源と独立にX−Y移動が可能である。図34の構成では、X線焦点を走査することで異なる角度から1つの視野へX線を照射することができるため、検査対象の移動をおこなわないで1つの視野の複数方向からの透視画像を撮像することができる。
【0336】
撮像時の動作としては、以下のようである。
1つのX線検出器23での撮像中は、X線焦点位置17は移動させない。4つのX線検出器23.1〜23.4で順次撮像し、そのときX線焦点17はそれぞれの検出器中心と視野中心を結ぶ直線とターゲットが交わる点に位置する。
【0337】
4つのX線検出器23.1〜23.4での撮像が終了すると、検出器駆動部22により、4つ同時に検出器位置を次の撮像位置へ移動させる。
【0338】
図35は、図34に示すX線検査装置900のCT撮像フローチャートである。
ここでも、検査全体のフローは、図12に示したものと同様であるので、図35では、図12のステップS310の1視野のCT撮像の部分を示す。
【0339】
したがって、図35は、図12に説明したステップS310の1視野のCT撮像のフローチャートを示す図である。
【0340】
また、図36は、図35に示した検査フローにおいて、検査時間に沿ったX線検出器とX線焦点位置の動作を示すタイミングチャートである。
【0341】
以下、図35および図36を参照して、まず、1視野のCT撮像処理が開始されると(S800)、演算部70は、検査したい視野を適切な位置に移動させるために検査対象をX−Y平面内で移動させる。さらに、演算部70は、X線検出器駆動機構22も、所定の位置(このときは、位置1)に移動させ、X線焦点17からX線を、X線検出器23.1に照射し、X線検出器23.1で撮像する(S802)。
【0342】
次に、演算部70は、X線焦点17から、X線をX線検出器23.2に照射し、X線検出器23.2で撮像する(S804)。
【0343】
次に、演算部70は、X線焦点17から、X線をX線検出器23.3に照射し、X線検出器23.3で撮像する(S806)。
【0344】
次に、演算部70は、X線焦点17から、X線をX線検出器23.4に照射し、X線検出器23.4で撮像する(S808)。
【0345】
続いて、演算部70は、X線検出器23.1〜23.4による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S810)。
【0346】
次に、演算部70は、撮像が規定枚数に達したかを判定する(S812)。画像再構成のための規定枚数に達していなければ、演算部70は、処理をステップS814に移行する。一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S816)、処理をステップS312に移行させる。
【0347】
ステップS814では、演算部70は、X線検出器駆動機構22を、次の所定の位置(このときは、位置2)に移動させ、処理をステップS802に移行する。
【0348】
以下、ステップS812で、規定枚数に達したと判断するまで、ステップS802〜S810およびS814の処理を繰り返す。
【0349】
図36の1視野の複数方向撮像タイミングチャートを参照して、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は上述のとおりとする。
【0350】
このとき、検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回のメカ移動時間の合計であるから、式(21)で表される。
【0351】
Ti = MTv + (M−1)Tm …(21)
次に、1視野のCT撮像時間について説明する。
【0352】
1視野のCT撮像時間Tvは、S個のX線検出器を使用してN回の撮像を行い、N/S回の移動をおこなうため、式(22)で表される。この時、撮像画像のデータ転送は機械的な移動と同時に行うとした。
【0353】
Tv = NTs+(N/S-1)Tm …(22)
よって、図34に示す従来法で1視野を異なる角度から16枚撮像するために要する時間Tvは、Tv=16Ts+3Tmである。
【0354】
(実施の形態4のX線検査装置110の構成)
以下に説明するように、実施の形態4のX線検査装置110では、以下に説明する構成を有することで、撮像に要する時間を短縮する。
【0355】
すなわち、図34で説明したような焦点走査型X線源を使用した撮像方法は、X線検出器の機械的移動時間の短縮という点では効果があるものの、撮像の高速化という観点からは、以下のような改善の余地がある。
【0356】
i)走査型X線源は高速にX線焦点位置を移動させることができる。しかし、一つの対象領域を異なる角度から撮像するためには、X線検出器が1個では、十分にその特徴を生かせない。なぜなら、X線検出器の機械的移動にX線焦点移動よりもはるかに長い時間を要するためである。
【0357】
ii)一方で、X線検出器が複数の場合、走査型X線源で順番にX線検出器の撮像データを取得する方法は、撮像で使用しているX線検出器以外のX線検出器は稼動していないため、複数のX線検出器が効果的に高速化に寄与しているとはいえない。
【0358】
iii)X線強度を上げるためには、ターゲット電流を増やす必要があるが、ターゲットが熱損傷を受ける。そのため、大きなターゲット電流を使用する場合は、ターゲットの温度上昇がターゲットが損傷する温度に達する前に焦点を移動させる、すなわち、一点への照射時間を短くする必要がある。ただしこの場合、X線を放射している時間が短いため、X線検出器で画像データを得るには不十分な線量となる。
【0359】
実施の形態4のX線検査装置では、図34の構成から、以下のような点を変更する。
1)ターゲット電流を増やす。
【0360】
2)複数のX線検出器を同時に使用する。
3)ターゲット上の一箇所への電子ビーム照射時間を短くする。
【0361】
4)X線検出器の1回の露光時間中、対応したX線焦点位置へ複数回に分けて強い電子ビームを照射する。
【0362】
1つのX線焦点箇所へ複数回に分けてパルス的に電子ビームを照射することで、ターゲット上のX線ビームが照射される部分は、電子ビームが当たっていない時間中に放熱冷却することができる。そのため、一定時間の照射でターゲットが損傷する温度に達するほどに強い電子ビームでも、ターゲット温度が許容範囲の時間内に、次のX線焦点位置に移すことで使用できる。また、複数のX線検出器を同時に撮像に利用できるため、全体の撮像時間が短縮される。
【0363】
図37は、実施の形態4のX線検査装置110の構成を説明するためのブロック図である。
【0364】
図37を参照して、X線検査装置110では、4つのX線検出器23.1〜23.4は、円形のセンサベース22.6上に同一円周上で90度の角度ごとに固定されている。X線検出器駆動部22によりセンサベース22.6が所定角度ずつ回転することで、図34と同様に、位置1〜4に検出器配置が移動する。
【0365】
さらに、後に説明するように、4つのX線検出器23.1〜23.4は、同時にアクティブとなり、X線のセンシングを行なうために、X線の照射をX線焦点がそれぞれ対応する検出器方向のみに制限するために遮蔽体66を設置している。
【0366】
その他、図1と同一の構成部分には同一の符号を付して説明は繰り返さない。また、図37でも、図1の構成において、以後の説明に直接関連していない部分については、図示省略している。
【0367】
なお、図37では、4つのX線検出器が互いの位置関係を保ったまま同一円上を移動する系を想定しているが、それぞれの検出器を独立に位置制御できる機構を設けても良い。さらに、X線検出器23の枚数は4枚以上でも以下でもかまわない。同様に、X線焦点位置もX線検出器23の個数に応じて、4つ以上でも以下でもかまわない。
【0368】
以下、動作を説明する。
X線検出器23.1〜23.4が同時に一回の透視画像撮影を行う間に、X線焦点はそれぞれのX線検出器に対応した焦点位置a〜dで複数回静止する。
【0369】
X線検出器23での撮像が終了すると、X線検出器駆動部22により、4つ同時にX線検出器位置を次の撮像位置へ移動させる。
【0370】
図38は、X線検出器23として使用される検出器の構成を示す概念図である。
X線検出器23としては、図38(a)に示すようなフラットパネル検出器に代表される電荷蓄積型のX線検出器、または、図38(b)に示すようなイメージインテンシファイヤを使用することができる。X線検出器23は、入射したX線を種々の手法によって電子に変換し、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)デバイスに蓄積する機能によってX線の入射位置を記録する。
【0371】
電荷の蓄積時間がX線検出器の露光時間となるため、一度の露光時間中の照射線量が同じであれば、連続的に入射するX線でも、複数回パルス的に照射されたX線であっても同一の出力(画像データ)を取り出すことができる。この特性によって、X線検査装置110の検査手法が実現される。
【0372】
図39は、図37に示したX線検査装置110の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0373】
図39に示す動作例は、図37の構成を上から見たものであり、16枚のX線透視画像を異なる角度から撮像することを想定した動作例である。
【0374】
なお、遮蔽体66や、X線検出器駆動部22は図示省略している。
図39を参照して、1つの視野を撮像する際に、X線検出器23.1〜23.4が移動する位置をそれぞれA1〜A4、B1〜B4、C1〜C4、D1〜D4とする。また、X線検出器位置に対応したX線焦点位置をa1,a2,b1,b2,c1,c2,d1,d2等で表している。
【0375】
なお、X線検出器駆動部22が円形のセンサベースであるため、図39では、X線検出器23は、X線検出器駆動部22の回転軸に常に同じ方向を向いて移動している。しかし、たとえば、X線検出器駆動部22を2軸のロボットアーム等で構成し、画像再構成手法に反復的手法やトモシンセシスなどを用いる場合は、移動平面のXY軸に対して同じ向きを保ったままでも良い。
【0376】
図40は、図37に示したX線検査装置110の構成による1視野撮像のフローチャートである。
【0377】
なお、このフローチャートでの動作を説明する前提として、以下のことを確認しておく。
【0378】
1)再構成画像の生成には複数の異なる角度から撮像した視野のX線透視画像が必要である。
【0379】
2)視野はX線検出器回転移動の軸上に設置されている。
3)2つ以上のX線検出器23(この例では4個)を使用する。
【0380】
4)X線検出器はそれぞれの相対的な位置関係を保ったまま、円軌道上を移動する。
5)X線検出器は、撮像時には静止している。
【0381】
6)X線源には、高速にX線焦点移動が可能な走査型X線源を使用する。
7)X線源に対しては、位置を固定した遮蔽体66を設置している。
【0382】
図40を参照して、演算部70が、視野の再構成画像による検査が必要であると判断し、1視野のCT撮像を開始すると(S820)、演算部70からの命令に応じて、すべてのX線検出器23.1〜23.4が露光を開始する。それと同時に、演算部70からの命令に応じて、走査型X線源は、X線検出器23.1〜23.4の各位置に対応した複数箇所からパルス照射をおこなう。撮像(露光)が終了すると、演算部70は、X線源に照射を停止させる(S822)
続いて、演算部70からの命令に応じて、すべてのX線検出器23.1〜23.4はセンサベース22.6の回転軸を中心として、円軌道上で位置を移動する。このとき、X線検出器23は直前に取得した撮像データを円残部70を介してメモリ90へ転送し、電荷を放出することで、再度撮像が可能な状態となる(S824)。
【0383】
続いて、演算部70は、合計撮像枚数が規定枚数に達しているかを判断し、規定枚数に達するまで、ステップS822〜S824の処理を繰り返させる(S826)。
【0384】
演算部70が、規定枚数まで撮像が完了したと判断すると、撮像を終了し、画像の再構成プロセス(S312)に移行する。
【0385】
図41は、4つのX線検出器23.1〜23.4を使用した際の走査型X線源動作を説明するためのタイミングチャートである。
【0386】
図41においては、X線焦点位置を移動させる時間は、露光に要する時間と比較して無視できるほど短い。
【0387】
図41(a)に示すように、図34で説明した撮像方法を用いて、十分な情報量の透視画像一枚を取得するために必要な露光時間と、平衡温度に達したときに耐久可能なターゲット電流をそれぞれTs、Iとする。
【0388】
図41(b)に示すように、X線の強度はターゲット電流に比例するため、ターゲット電流Iを2倍にすると、画像取得に必要な時間Tsを1/2Tsにすることができる。しかし、強力な電子ビームを利用することは温度上昇によりターゲット損傷が生じるため、実際には、図41(b)に示すようにX線源を使用することはできない。ターゲットの温度は電子ビームを照射することで上昇し、一定時間の照射によって平衡状態に達する。このときの温度は照射する電子ビームの電流量に比例するため、この困難さが生じる。
【0389】
そこで、図41(c)に示すように、ターゲット温度が平衡に達するよりもはるかに短い時間間隔でX線焦点位置を移動させる。なお、図41において、aとは、現在のX線検出器23の位置に対応する焦点位置a1〜a4のうちの1つを意味する。他のb,c,d,についても同様である。図41(c)のようなパルス状に電子ビームを流すと、図41(b)の状態では、利用できない大電流を効果的に利用した撮像が可能となる。
【0390】
図41(c)のような電子ビームの駆動を行なう場合、X線が出ている瞬間の各X線焦点位置でのターゲット電流を2Iとすると、図41(a)の例で4TsかけてX線検出器23.1〜23.4で得られたのと同じ情報量の透視画像を撮像するために必要な露光時間は2Tsである。X線検出器23.1〜23.4の合計露光時間は図41(b)の例と同じになるが、ターゲットの損傷なしに撮像することができる。
【0391】
図42は、図37で示したX線検査装置110での1視野撮像のタイミングチャートである。
【0392】
図42に示すとおり、1視野の撮像時間は式(23)で表すことができる。撮像枚数Nは検出器の数の整数倍とする。
【0393】
Tv =(N/S)Tss + (N/S-1)Tss …(23)
なお、各記号の意味は以下のとおりである。
【0394】
N :撮像枚数(X線検出器の数の整数倍)
S :X線検出器の数
Tv:1つの視野を撮像する時間
Tm:メカ(ステージ・X線検出器)が移動する時間
Tss:S個のX線検出器の同時露光のための撮像(X線検出器の露光)時間
なお、撮像枚数Nについては、以後の説明のわかりやすさのためにX線検出器の数の整数倍としているが、必ずしも整数倍に限定されるわけではない。
【0395】
たとえば、画像の再構成に必要な透視画像の撮像枚数を16枚と仮定し、図37〜図41で説明した撮像方式を用いたとき、再構成に必要な枚数である16枚の画像を得るためにかかる時間は、4Tss+3Tmとなる。Tssは前述のとおり、X線の強度を上げることができるため4Ts>Tssとなる。よって、図34で説明した4つの検出器を使用した場合の(16Ts+3Tm)と比較して撮像時間を短縮することができる。
【0396】
図43は、走査型X線源の構造を示す概念図である。
図43(a)は、透過型ターゲット使用のX線源内部構成例であり、図43(b)は反射型ターゲットの例を示している。以下に説明するように、走査型X線源がこのような構造であることにより、実施の形態4のような動作が可能となる。
【0397】
走査型X線源では、電子銃から放出された電子ビームは、収束レンズによって電子ビームのスポット径が絞られる。また、電子ビームは、外部から制御される偏向器によって、X方向・Y方向へ曲げられ、X線ターゲット上の任意の位置に衝突する(ターゲットに衝突する電子ビームを一般にターゲット電流とよぶ)。
【0398】
このとき、X線ターゲットに衝突する電子ビームの運動エネルギーの99%は熱となり、約1%が制動X線となる。
【0399】
上述のとおり、X線ターゲットは、透過型(図43(a))と反射型(図43(b))とがある。透過型の場合、一般にベリリウムやアルミの上のタングステンが蒸着されたものである。
【0400】
なお、X線焦点移動中の露光を防ぐために、電子ビームの位置(X線焦点位置)を変更する際は、電子ビームを停止させてもよい。例えば、電子銃のグリッド電圧を制御することにより電子ビームのON/OFFを行う。
【0401】
[実施の形態5]
以上の説明では、検査対象の視野を変更する場合は、検査対象を検査対象位置制御機構により移動させるものとして説明してきた。
【0402】
ただし、走査型X線源を使用する場合は、一定範囲内であれば、X線焦点位置17とX線検出器23の相対的な位置関係の調整により、検査対象を移動させることなく、視野を変更することが可能である。
【0403】
この場合、1つの視野において画像再構成に必要な複数の画像を撮像する際のX線ターゲット上の焦点の軌跡の中心は、ターゲット中心から外れたものとなる。そこで、このようなCT撮像を、以下この明細書中では、「偏心CT撮像」と呼ぶことにする。
【0404】
実施の形態5におけるX線検査装置では、このような偏心CT撮像と実施の形態1の変形例で説明したようなX線検出器駆動部22とを組み合わせた構成とする。
【0405】
すなわち、一般には、CT画像再構成領域よりも検査領域が広いため、検査領域を複数の視野(1回のCT撮像での再構成領域)に分割する必要がある。通常、視野から視野への移動は検査対象をX−Yステージなどで機械的な移動させることで実現されている。実施の形態5のX線検査装置では、視野から視野への移動をX線焦点位置の電子的移動によるモーションレスで実現することでシステムの高速化を図る。
【0406】
そこで、走査型X線源を用いて、電気的制御によりX線焦点位置を移動させることで、機械的な移動をなくし高速に撮像位置を移動できる。複数のX線検出器23を予め定位置に配置することでX線検出器23の機械的移動時間を短縮する。視野移動をX線焦点位置の移動のみで行うことで、視野移動を高速にする。
【0407】
図44は、このような実施の形態5のX線検査装置120の構成を説明するためのブロック図である。
【0408】
ただし、X線検査装置120の構成は、以下に説明するようなX線検出器23の位置の移動およびX線焦点17の位置の移動の制御を除いては、図10で説明したX線検査装置100の構成と同様であるので、その構成についての説明は繰り返さない。なお、以下に説明するように、X線検出器23を自転させる構成は、本実施の形態においては必要ではなく、X線検出器23は、X−Y平面内で平行に移動するものとする。
【0409】
図45は、平行移動X線検出器を用いた撮像系の動作例を示す図である。
図45では、4つの視野をX線検出器23や検査対象の機械的な移動なしで再構成する例を示している。図45は、図44の構成を上から見たものであり、8枚の透視画像を等角度から撮像することを想定した動作例を示したものである。
【0410】
図45の動作例は、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、機械的な機構の高速化、保守性の向上を図ることができる。
【0411】
図45のような動作が可能であるためには、X線検出器23.1とX線検出器23.2が独立に動作できる範囲は分かれていることが必要である。
【0412】
また、図45においては、位置A1、B1はそれぞれX線検出器23.1とX線検出器23.2の初期位置とする。位置A1〜A4、B1〜B4はそれぞれ画像再構成に必要な透視画像を取得するX線検出器23.1とX線検出器23.2の位置とする。
【0413】
図45の例では、X線検出器23.1とX線検出器23.2とは、撮像系の原点を中心とした一定距離で移動する。その結果撮像系を上から見た場合、それぞれ半円の軌跡を持つ。ただし、X線検出器23の移動は円軌道に限られるものではない。
【0414】
図45において、位置a1−1,a2−1,b1−1,b2−1はX線ターゲット上の焦点位置17である。焦点位置a1−1は、視野1を撮像する際のX線検出器位置A1に対する焦点を示し、焦点位置a2−1は、視野2を撮像する際のX線検出器位置A1に対する焦点を示す。視野1を撮像する際には、X線検出器位置A1〜A4に応じて、焦点位置a1−1から、順次、焦点位置a1−2,a1−3,a1−4(図示せず)をターゲット上の図中の点線のような円の軌道上に位置させ、同様に、焦点位置a2−1についても同様に、X線検出器位置A1〜A4に応じて、焦点位置a2−1から、順次、焦点位置a2−2,a2−3,a2−4(図示せず)をターゲット上の図中の点線のような円の軌道上に位置させる。焦点位置b1−1は、視野1を撮像する際のX線検出器位置B1に対する焦点を示し、焦点位置b2−1は、視野2を撮像する際のX線検出器位置B1に対する焦点を示す。焦点位置b1−1および焦点位置b2−1も焦点位置a1−1,a2−1と同様に、X線検出器位置B1〜B4に応じて、ターゲット上で図中の点線のような円の軌道上の他の焦点位置に移動する。
【0415】
図45のようにX線検出器23およびX線焦点位置の移動を伴う検査の全体的なフローは、図12で示したものと同様である。
【0416】
ただし、実施の形態5のX線検査装置120では、2個目以降の視野については、視野の移動の時間が短縮される。なぜならば、1つの視野についての最後の撮像を始めると同時に、もう片方のX線検出器を次の視野の撮像位置に移動させておくためである。この時、ステージを移動させる必要がないようにX線焦点位置のみを変更することで対応する。つまり、図45の動作例で示したように視野によって、撮像される角度が異なるように撮像する。ただし、このような等間隔でない撮像を行うと再構成画像が劣化する可能性があるが、反復的手法を用いることで劣化を軽減することが可能である。
【0417】
図46は、図44および図45で説明した撮像系の1視野についての検査の処理のフローチャートである。
【0418】
図47は、図44および図45で説明した撮像系の1視野についての検査タイミングチャートである。
【0419】
以下、図46および図47を参照して、実施の形態5のX線検査装置120の1視野についての検査処理を説明する。
【0420】
まず、CT撮像を始める前に、視野(検査対象)、X線検出器23は所定の初期位置A1,B1にあるものとする。
【0421】
1視野についてのCT撮像が開始されると(S900)、最初に、演算部70は、X線検出器23.1にて検査対象を撮像させる(S902)。すなわち、演算部70は、X線焦点をX線検出器23.1に対応する位置a1−1に移動し撮像する。なお、X線焦点の移動は、電子的に行われるため露光時間やメカ移動時間と比べ無視できるほど高速である。撮像(検出器の露光)時間は予め設定しておいてもよいし、目視で任意の時間に設定することもできる。検査対象の撮像データは、X線源からX線を照射し、X線検出器を露光することで得られる。露光時間は、検査対象のサイズや、X線源の発生するX線の強度から予め決めておくことが可能である。
【0422】
次に、演算部70は、X線検出器23.1で撮像した画像データを演算部70に対して転送させる(S906)。画像取得制御機構30により、演算部70の使用するメモリ90に撮像データを転送する。
【0423】
このデータ転送と並行して、演算部70は、焦点位置b1−1でX線を照射しX線検出器23.2にて検査対象を撮像する(S904)と同時にX線検出器23.1を次の撮像位置に移動する(S906)。X線検出器23.2の撮像は上述したX線検出器23.1の撮像と同様に行う。なお、この時にX線検出器23.2で撮像するために、X線焦点17を移動させる必要があるが、他の処理と比較して高速である。X線検出器23.1の次の撮像位置(A2)は、検査前に決めておく必要がある。通常、X線検出器で撮像する位置はCADデータ等の設計情報から撮像枚数を決める時に、決めることができる。
【0424】
続いて、1視野についての撮像の規定枚数に達していない場合(S910)、演算部70は、X線検出器23.2で撮像した画像データを演算部70に転送する(S912)。このデータ転送と並行して、演算部70は、焦点位置a1−2でX線を照射しX線検出器23.1にて検査対象を撮像する(S910)と同時にX線検出器23.2を次の撮像位置(B2)に移動させる(S912)。同様に、次の撮像位置(B2)も、検査前に決めておく必要がある。
【0425】
以下同様にして、X線検出器23.2での撮像とX線検出器23.1からの撮像データの転送またはX線検出器23.1の次の撮像位置への移動とを並行して行い、あるいは、X線検出器23.1での撮像とX線検出器23.2からの撮像データの転送またはX線検出器23.2の次の撮像位置への移動とを並行して行うことを、撮像枚数が規定枚数に達するまで繰り返す。この点では、図14で説明した実施の形態1の動作と基本的には同様である。
【0426】
そして、規定枚数の撮像が完了すると(S908)、演算部70は、X線検出器23.2からの撮像データの転送とX線検出器23.2の次の撮像位置への移動を行って(S914)、1視野の撮像処理を終了して(S916)、処理をステップS312に移行させる。
【0427】
次に、図47での1視野のCT撮像に要する時間を見積もると以下のようである。
Tv=(N/S−1)Tm+STs
各処理の時間を下記のように定義する。
【0428】
Tm:メカ(X線検出器)が移動する時間
Ts:撮像(X線検出器の露光)時間
S個(例えば2個)のX線検出器23による1視野のCT撮像時間Tvは、N回の撮像時間と、N/S回のメカ移動時間の合計である。ただし、各処理のかかる時間により、Tvは変化する。以下では、一般的な撮像時間を考慮して、Tm>Ts>>Tf(X線焦点の移動時間)(X線焦点は他処理と比較して十分高速であるため無視できる)として計算を行う。
【0429】
さらに、X線検出器が2個の場合について説明する。
まず、X線検出器23.1で撮像するため、Tsの時間がかかる。次に、X線焦点を移動するため、Tfの時間がかかるが、同時にX線検出器23.1を次の撮像位置A2に移動する。X線検出器23.2は既に所定位置に配置されているため、移動時間は発生せずに撮像できるため、Tsの時間がかかる。X線検出器23.2で撮像後、X線検出器23.2を移動させる。次に、X線検出器23.1にて撮像を行うが、移動がまだ終了してない。移動が終了するのが、撮像開始からTs+Tm後となり、位置A2にてX線検出器23.1の撮像を行う。次に、X線検出器23.2の撮像を行うが移動が終了していないため、撮像の開始時間は、Ts+Tm後である。X線検出器23.2で最初に撮像を開始したのが、Ts後であるから、1周期の撮像時間はTmとなる。よって、1周期の撮像時間Tmが(N/2−1)回あり、X線検出器23.1の最初の撮像(A1)時間TsとX線焦点移動時間TfとX線検出器23.2の最後の撮像を加算すると、1視野のCT撮像時間が求まり、式(24)で表される。
【0430】
Tv=(N/2−1)Tm+2Ts …(24)
また、次の視野への移動時間は、X線検出器23.1が次の視野の撮像位置に移動する時間から、X線検出器23.2の撮像時間Tsを引いた時間となるため、式(25)で表される。
【0431】
Te=Tm−Ts …(25)
図48は、図44および図45で説明した撮像系の検査全体についての検査タイミングチャートである。
【0432】
図48では、検査対象をM個(例えば、4個)の視野に分割し、CT撮像としてN枚の撮像を行うとする。記号の定義は以下に示す。
【0433】
検査対象全体のCT撮像時間Tiは、M個の視野を撮像し、(M−1)回の視野移動時間の合計であるから、式(26)で表される。
【0434】
Ti=MTv+(M−1)Te …(26)
ただし、記号に意味は以下の通りである。
【0435】
Ti:検査対象全体を撮像する時間
Tv:1つの視野を撮像する時間
Te:視野の移動時間
X線検査装置120では、視野の移動時間Teは、ほぼ、移動時間Tmと撮像時間Tsとの差となるため、移動時間が大幅に短縮される。
【0436】
[実施の形態5の変形例]
図49は、実施の形態5の変形例のX線検査装置122の構成を説明する図である。X線検査装置122は、直線移動型のX線検出器とX線源10として走査型X線源とを用いている。
【0437】
ただし、X線検査装置122の構成は、以下に説明するようなX線検出器23の位置の移動およびX線焦点17の位置の移動の制御を除いては、図15で説明したX線検査装置102の構成と同様であるので、その構成についての説明は繰り返さない。なお、以下に説明するように、X線検出器23を自転させる構成は本実施の形態の変形例においては、必要ではなく、X線検出器23は、X−Y平面内で平行に移動するものとする。
【0438】
図50は、X線検査装置122の平行移動X線検出器を用いた撮像系の動作例を示す図である。
【0439】
図50では、4つの視野をX線検出器23や検査対象の機械的な移動なしで再構成する例を示している。図50は、図49の構成を上から見たものであり、9のX線透視画像を異なる等間隔の距離から撮像することを想定した動作例を示している。
【0440】
X線検出器の位置A1〜A3、位置B1〜B3、位置C1〜C3はそれぞれ画像再構成に必要な透視画像を取得するX線検出器23.1、X線検出器23.2およびX線検出器23.3の位置である。位置の符号のうち1〜3の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA3の位置で撮像する。ただし、撮像する順番はこの通りでなくてもよい。
【0441】
なお、X線検出器の位置A1〜A3に対応する焦点のターゲット上の軌跡は、焦点軌跡1のような直線となり、X線検出器の位置B1〜B3に対応する焦点のターゲット上の軌跡は、焦点軌跡2のような直線となり、X線検出器の位置C1〜C3に対応する焦点のターゲット上の軌跡は、焦点軌跡3のような直線となる。
【0442】
このようなX線検出器の配置も、やはり、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。そして、この動作の場合、X線検出器23を自転する必要がないため、X線検出器駆動部22を簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0443】
図51は、図49および図50で説明した直線移動検出器を用いた撮像系の1視野についての検査の処理のフローチャートである。
【0444】
図52は、図49および図50で説明した撮像系の1視野についての検査タイミングチャートである。
【0445】
以下、図51および図52を参照して、実施の形態5の変形例のX線検査装置122の1視野についての検査処理を説明する。
【0446】
まず、CT撮像を始める前に、視野(検査対象)、X線検出器23は所定の初期位置A1,B1,C1にあるものとする。
【0447】
1視野についてのCT撮像が開始されると(S920)、最初に、演算部70は、X線検出器23.1にて検査対象を撮像させる(S922)。すなわち、演算部70は、X線焦点をX線検出器23.1に対応する位置a1−1に移動し撮像する。なお、X線焦点の移動は、電子的に行われるため露光時間やメカ移動時間と比べ無視できるほど高速である。撮像(検出器の露光)時間は予め設定しておいてもよいし、目視で任意の時間に設定することもできる。検査対象の撮像データは、X線源からX線を照射し、X線検出器を露光することで得られる。露光時間は、検査対象のサイズや、X線源の発生するX線の強度から予め決めておくことが可能である。
【0448】
次に、演算部70は、X線検出器23.1で撮像した画像データを演算部70に対して転送させる(S926)。画像取得制御機構30により、演算部70の使用するメモリ90に撮像データを転送する。
【0449】
このデータ転送と並行して、演算部70は、焦点位置b1−1でX線を照射しX線検出器23.2にて検査対象を撮像する(S924)と同時にX線検出器23.1を次の撮像位置(A2)に移動する(S926)。X線検出器23.2の撮像は上述したX線検出器23.1の撮像と同様に行う。なお、この時にX線検出器23.2で撮像するために、X線焦点17を移動させる必要があるが、他の処理と比較して高速である。X線検出器23.1の次の撮像位置(A2)は、検査前に決めておく必要がある。通常、X線検出器で撮像する位置はCADデータ等の設計情報から撮像枚数を決める時に、決めることができる。
【0450】
次に、演算部70は、X線検出器23.2で撮像した画像データを演算部70の使用するメモリ90に転送する(S930)。
【0451】
このデータ転送と並行して、演算部70は、焦点位置c1−1でX線を照射しX線検出器23.3にて検査対象を撮像する(S928)と同時にX線検出器23.2を次の撮像位置(B2)に移動する(S930)。X線検出器23.3の撮像も上述したX線検出器23.1の撮像と同様に行う。
【0452】
続いて、1視野についての撮像の規定枚数に達していない場合(S932)、演算部70は、X線検出器23.3で撮像した画像データを演算部70で使用するメモリ70に転送する(S936)。このデータ転送と並行して、演算部70は、焦点位置a1−2でX線を照射しX線検出器23.1にて検査対象を撮像する(S934)と同時にX線検出器23.3を次の撮像位置(C2)に移動させる(S936)。同様に、次の撮像位置(C2)も、検査前に決めておく必要がある。
【0453】
以下同様にして、X線検出器23.2での撮像とX線検出器23.1からの撮像データの転送またはX線検出器23.1の次の撮像位置への移動とを並行して行い、あるいは、X線検出器23.3での撮像とX線検出器23.2からの撮像データの転送またはX線検出器23.2の次の撮像位置への移動とを並行して行い、あるいは、X線検出器23.1での撮像とX線検出器23.3からの撮像データの転送またはX線検出器23.3の次の撮像位置への移動とを並行して行うことを、撮像枚数が規定枚数に達するまで繰り返す。この点では、図14で説明した実施の形態1の動作と基本的には同様である。
【0454】
そして、規定枚数の撮像が完了すると(S932)、演算部70は、X線検出器23.3からの撮像データの転送とX線検出器23.3の次の撮像位置への移動を行って(S938)、1視野の撮像処理を終了して(S940)、処理をステップS312に移行させる。
【0455】
次に、図52のように直線移動検出器を用いた撮像系での1視野のCT撮像に要する時間を見積もると以下のようである。
【0456】
なお、各処理の時間の定義は、上述のとおりである。
S個(例えば3個)のX線検出器による1視野のCT撮像時間Tvは、N回の撮像時間と、N/S回のメカ移動時間の合計である。ただし、各処理のかかる時間により、Tvは変化する。以下では、一般的な撮像時間を考慮して、2Ts>Tm>>Tf(X線焦点の移動は他処理と比較して十分高速である)として計算を行う。
【0457】
さらに、以下では、X線検出器が3個の場合について説明する。
まずX線検出器23.1で撮像するため、Tsの時間がかかる。次に、X線焦点を移動するため、Tfの時間がかかるが、同時にX線検出器23.1を次の撮像位置A2に移動する。X線検出器23.2は既に所定位置に配置されているため、移動時間は発生せずに撮像できるため、Tsの時間がかかる。X線検出器23.2で撮像後、X線検出器23.2を移動させる。次に、X線検出器23.3で撮像する。X線検出器23.3は既に所定位置に配置されているため、移動時間は発生せずに撮像できるため、Tsの時間がかかる。
【0458】
次に、X線検出器23.1にて撮像を行う。既に移動は完了しているため、1周期の撮像時間は、3Tsである。よって、1視野の撮像時間Tvは、以下の式で表される。
【0459】
Tv=NTs
また、次の視野への移動時間は、X線焦点の移動時間のみであるから、以下の式のようになる。
【0460】
Te=Tf
よって、通常の撮像よりも高速な撮像が可能となる。
【0461】
[実施の形態6]
部品が半田付けされたプリント基板をX線で検査する際、プリント基板にはBGAのような再構成画像による検査が必要な部品と、透視画像のみの検査で事足りる部品が混在しているため、次の二種類の方法で撮像が可能なX線検査装置が望ましい。
【0462】
1)検査用画像再構成のために、部品を異なる複数の方向から撮像できる。
2)検査物をX線源の真上に置いての透視画像撮像できる。
【0463】
しかし、解析的画像再構手法に適したX線検出器の配置は、検査対象の垂直軸から一定距離はなれた円軌道上であり、垂直方向の透視画像検査には向いていない。そのため、垂直方向の透視画像撮像と透視画像撮像の両方を可能にする装置は、X線検出器をX−Y移動で透視画像撮像位置へ移動させる機構を有するか、もしくは透視画像撮像専用のX線検出器を追加で配置する必要がある。
【0464】
ただし、X線検出器をX−Y移動で透視画像撮像位置へ移動させる機構を有する場合でも、このような移動機構は、機械的にはできるだけ単純な構成を有することが、移動精度、保守等の観点からは望ましい。また、透視画像撮像専用のX線検出器を設けるのでは、この検出器分のコストが余計に必要となってしまう。
【0465】
そこで、以下に説明するように、実施の形態6のX線検査装置では、以下のような構成を有する。
【0466】
i)直線上で、独立にX線検出器の位置を移動させることができる3つのX線検出器移動機構とX線検出器移動機構に対応した3つのX線検出器(検出器)を設置する。なお、X線検出器の個数としては、2個以上であればよい。なお、X線検出器の個数が奇数の場合には、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能であるという利点があるので、X線検出器が3つ以上の奇数個設けられていることがより望ましい。ただし、検出器の個数と移動機構の個数を最低限に抑えるという点で、コストの観点からは、3個が望ましい。
【0467】
ii)3つのX線検出器移動機構のうちの一つは、X線検出器をX線源および検査対象の真上に位置させることができる移動機構に設置する。
【0468】
上述のとおり、奇数個X線検出器を設けることにより、真ん中のレール上を移動するX線検出器で、検査対象を真上から撮像することが可能となる。これは、たとえば、後に説明するフローチャートに従って動作する場合に、再構成画像による検査が必要かを判断するための透視画像を撮影するのに好適である。
【0469】
iii)撮像の際、中央のX線検出器を露光している間に、露光していない両端のX線検出器を次の撮像位置へ移動させる。また、両端の2つのX線検出器を露光している間に、露光していない中央のX線検出器を次の撮像位置へ移動させる。
【0470】
iv)2つのX線検出器を同時に露光する際には、2つの検出器に対応する位置で露光時間に対して短い時間間隔でX線焦点を時分割照射(パルス照射)させる。
【0471】
v)画像の再構成の手法としては、反復的手法、またはトモシンセシスによる画像再構成をおこなうことで、円軌道上ではない(直線上の)撮像位置からの画像を再構成に用いる。
【0472】
以下、実施の形態6のX線検査装置の構成および動作について説明する。
図53は、実施の形態6のX線検査装置130の構成を説明する図である。X線検査装置130は、直線移動型のX線検出器とX線源10として走査型X線源とを用いている。1つの視野について撮像中の検査対象の移動は必要ない。
【0473】
さらに、後に説明するように、X線源10をパルス動作させるため、図21に示したのと同様な遮蔽体66が設けられる構成となっている。
【0474】
図21の場合と同様に、遮蔽体66は、十分にX線を遮蔽する材質、厚さで作成されており、鉛等が好ましい。X線検出器23は直線移動をするため、遮蔽体66の開口部は矩形(もしくはスリット)となる。遮蔽体66のサイズは、X線検出器23.1のための焦点位置からのX線が、X線検出器23.3に入らない程度の大きさである。また、遮蔽体66の開口部のサイズは、X線検出器23.1のための焦点位置からのX線が、X線検出器23.1に十分入る大きさであるが、X線検出器23.2へのX線は遮蔽される程度の大きさである。以上の遮蔽体66の大きさおよびその開口部の大きさ関係は、他のX線検出器23.2および23.3についても同様である。
【0475】
検査対象領域、拡大率、X線検出器のサイズに適したスリット状の遮蔽体66を設置することで、複数のX線検出器を同時に露光状態として複数の位置からX線を放射した場合でも、検査対象領域の特定の角度からのみのX線透視画像をX線焦点と検査対象を通る直線状に設置したX線検出器23で取得することができる。
【0476】
遮蔽体66に入射したX線は散乱線を発生させ、すべてのX線検出器23を同時露光・パルス撮像した際には撮像画像の劣化を誘発する可能性がある。たとえば、X線検出器23.1,23.2および23.3を同時露光した場合、X線検出器23.1に向けて照射したX線の散乱線は、X線検出器23.2での撮像に影響を与える可能性がある。そこで、後述するように、X線検出器23を、両端の2つのX線検出器23.1および23.3と中央のX線検出器23.2で露光時間をずらして動作させることで、撮像時間は同じでも、散乱線の影響を抑えた撮像が可能となる。
【0477】
ただし、X線検査装置130の構成は、以下に説明するようなX線検出器23の位置の移動、X線焦点17の位置の移動の制御およびX線源10のパルス動作の制御を除いては、図15で説明したX線検査装置102の構成と同様であるので、その構成についての説明は繰り返さない。なお、以下に説明するように、X線検出器23を自転させる構成は本実施の形態の変形例においては、必要ではなく、X線検出器23は、X−Y平面内で平行に移動するものとする。
【0478】
図54は、図53に示したX線検査装置130の構成において、X線検出器23と走査型X線源との移動軌跡を上面図として示す図である。
【0479】
図54においては、X線検出器23.1,23.2および23.3は、それぞれレール上を直線的に移動できる機構を有する。
【0480】
X線源10は、上述のとおり、走査型X線源である。また、X線検出器23の撮像位置は、図54の配置に限定されるものではなく、さらに、撮像枚数は18枚に限定されるものではなく、検査可能な撮像枚数を指定すればよい。撮像枚数の指定は、CADデータ等の設計情報から計算してもよいし、作業者が目視で決めてもよい。
【0481】
図54において、位置A1〜A6、B1〜B6、C1〜C6は、それぞれ画像再構成に必要な透視画像を取得するX線検出器23.1,23.2および23.3の位置である。位置に付された1〜6の番号は撮像する順番を意味しており、最初はA1の位置で撮像し、最後にA6の位置で撮像する。
【0482】
また、位置a1、a2、b1、b2、c1、c2はX線ターゲット上の焦点位置であり、X線検出器位置が、それぞれ、位置A1、A2、B1、B2、C1、C2にある時に対応する。
【0483】
なお、上述したとおり、本実施の形態では、両端のX線検出器23.1および23.3とは同期して移動する。真ん中のX線検出器23.2は独立で位置を移動する。
【0484】
図54に示す動作例では、X線検出器23は、自転をせず、X−Y平面内を平行に移動している。このような動作例は、上述のとおり、反復的手法やトモシンセシス等の再構成手法を用いるのに適している。反復的手法やトモシンセシスはX線検出器の向きに関係なく再構成を行うことができるためである。
【0485】
この動作の場合、X線検出器を自転する必要がないため、X線検出器駆動機構をさらに簡略化でき、メカ機構の高速化、保守性の向上を図ることができる。
【0486】
図55は、図53および図54で説明した直線移動検出器を用いた撮像系の検査の処理のフローチャートである。
【0487】
図56は、図53および図54で説明した撮像系による1視野についての撮像の検査タイミングチャートである。
【0488】
以下、図55および図56を参照して、実施の形態6の変形例のX線検査装置130の検査処理を説明する。
【0489】
図55を参照して、まず、検査を始める前に、演算部70の検査対象位置制御部80からの命令により、検査対象位置制御機構は、検査対象の検査部分(視野)をX線源10のX線ターゲットの中心を通る垂直軸上に位置させた状態とした上で、X線検出器23.2による撮像で検査を開始するものとする。すなわち、透視画像の撮像するために、検査対象をのせたステージを所定の位置に、X線検出器23.2を初期位置(B3とB4の中間位置)にそれぞれ移動する。また、X線検出器23.1と23.3とは、それぞれ初期位置A1とC1とに移動する。通常、検査においては、検査位置の特定のために光学カメラ(図示せず)が搭載されているため、光学カメラの画像をもとに位置を決めることが可能である。その他の方法として、検査対象のCADデータをもとに自動的に決めてもよいし、作業者が目視で行ってもよい。
【0490】
検査処理が開始されると(S1000)、演算部70は、検査の開始直後において、X線焦点の真上にX線検出器23.2を位置させて撮像をおこなう(S1002)。撮像された画像データは、演算部70の使用するメモリ70に転送され(S1004)、このようにして得られたX線透視画像から、演算部70の良否判定部78は、該当部分の画像再構成検査の必要性を判断する(S1006)。ここでも、必要性の判定(良否判定)の手法は、様々な手法が提案されており、すでに上述したため、ここでは詳細を繰り返さない。
【0491】
演算部70は、再構成画像による検査が必要ない場合には、全視野について検査が終了していると判断すると(S1036)、検査を終了させる(S1040)。
【0492】
一方、演算部70は、再構成画像による検査が必要な場合は、続いて、1つの視野についてのCT撮像を行わせる。
【0493】
図55および図56を参照して、1視野についてのCT撮像においては、検査対象内の視野(再構成領域もしくは、上記の透視画像撮像範囲と同様の領域)を複数の方向から撮像する。
【0494】
演算部70は、X線焦点を両端のX線検出器23.1および23.3に対応する位置に時分割で移動してX線を照射し、X線検出器23.1および23.3で撮像する(S1010)。この撮像と並行して、演算部70は、X線検出器23.2を次の撮像位置(B1)に移動させる(S1020)。なお、この時点では、X線検出器23.2については、移動を行うのみで、撮像データの転送は行わない。
【0495】
続いて、演算部70は、X線検出器23.1および23.3による撮像データを、3D画像再構成部78での再構成処理のために、たとえば、メモリ90に転送する(S1012)。これと並行して、演算部70は、X線焦点をX線検出器23.2に対応する位置に移動してX線を照射し、X線検出器23.2で撮像する(S1022)。
【0496】
演算部70は、1視野についての規定枚数の撮像が終了していないと判断した場合は(S1030)、処理をステップS1010およびS1020に復帰させる。
【0497】
一方、規定枚数に達していれば、演算部70は、1視野のCT撮像処理を終了し(S1030)、処理をステップS1032に移行させる。
【0498】
なお、フローチャート上では、データ転送後に規定枚数撮像したかの判断を行っているが、データ転送と同時に撮像枚数の判断を行うのが好ましい。なぜならば、データ転送には、たとえば、200ms程度の時間がかかるため、次の撮像位置への移動が遅くなる。そのため、撮像する度に遅延が発生することになってしまう。この遅延時間を短縮し高速化を図るために、データ転送と行うと同時に、規定枚数の判断と検査対象・X線検出器の移動を行うことが好ましい。
【0499】
次に、演算部70の3D画像再構成部76は、ステップS1032において、複数方向の撮像画像から再構成画像を生成する。
【0500】
続けて、演算部70の良否判定部78は、再構成画像による良否判定を行う(S1034)。ここでも、良否判定の方法は、上述のとおり、周知であるため検査項目に適した良否判定手法を用いればよく、ここでは詳細の説明は繰り返さない。
【0501】
さらに、演算部70は、全視野の検査を終了したか否かを判断し(S1036)、終了していない場合は、視野を次の位置に移動するとともにX線検出器23もそれぞれの初期位置に復帰させ(S1038)、処理を、ステップS1002に復帰させる。一方で、演算部70は、全視野について検査が終了していれば、本検査を終了させる(S1040)。
【0502】
なお、図12中では、透視画像と再構成画像で検査を行っているが、透視画像による検査を行わずに、再構成画像による検査のみを行うことも可能である。ただし、通常、再構成処理は比較的時間がかかるため、再構成画像による検査の前に、透視画像で良否判定をすることで全体の検査時間を短くすることができる。
【0503】
図56に示すように、X線検出器23.1と23.3とで同時露光し、その間にX線検出器23.2は画像再構成に必要な画像を取得できる撮像位置へ移動する。X線検出器23.1と23.3との撮像とX線検出器23.2の移動が完了すると、今度は、X線検出器23.2で撮像を開始し、X線検出器23.1と23.3とは次の撮像位置へ移動する。これらの動作を繰り返しおこなうことで、画像再構成に必要な異なる角度からの複数枚の透視画像を、X線源10の非稼動時間・撮像対象の移動なしに撮像できる。
【0504】
1視野の撮像時間Tvは、以下の式で表される。
Ts>Tmの場合: Tv=2/3NTs
Ts<Tmの場合: Tv=(N/3−1)(Ts+Tm)+2Ts
例として、18枚の撮像に要する時間は、Ts>Tmの場合は12Ts、 Ts<Tmの場合は7Ts+5Tmであり、撮像時間を大幅に高速化することができる。
【0505】
以上の構成により、実施の形態6のX線検査装置130では、以下のような効果の少なくとも1つまたはその組み合わせを奏することが可能である。
【0506】
1)X線検出器23がそれぞれ独立に動作し、X線検出器23中のX線源10の非稼働時間を削減することができる。
【0507】
2)ターゲット電流を大きくし、複数のX線検出器23を同時に露光することで、強いX線を効率的に利用することができる。
【0508】
3)X線検出器の動作を直線に限定することで、X線検出器23の移動機構を簡素化でき、移動を高速化することができる。
【0509】
4)同じ向きに移動する(平行に移動する)X線検出器23で撮影した矩形の画像を、反復的画像再構成アルゴリズムを用いて再構成することで、広範囲の再構成画像を得る。
【0510】
5)また、奇数個、たとえば、3個のX線検出器のうちの1つをX線源10の真上を通る構造にすることで、透視画像撮影、再構成画像撮影の両方に利用することができる。
【0511】
6)また、X線検出器23が3個の場合、中央のX線検出器と両端の2つのX線検出器でタイミングをずらして露光させることによって、中央撮像時の両端のX線検出器への散乱X線と、両端撮像時の中央のX線検出器への散乱X線による画像の劣化を回避することができる。同様の効果は、たとえば、X線検出器23が5個以上奇数個設けられている場合は、中央のX線検出器とこれと1つおきのX線検出器と、残りのX線検出器とで、タイミングをずらして露光させることによっても奏されうる。
【0512】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0513】
10 走査型X線源、11 ターゲット、12 偏向ヨーク、13 電子線収束コイル、14 高圧電源、15 真空ポンプ、19 電子銃、16 電子ビーム、17 X線焦点位置、18 X線、20 検査対象、22 センサベース、23 X線検出器、24 スライダ、25 X線モジュール、26 X線受光部、27 データケーブル、28 電源ケーブル、29 データ処理部、30 画像取得制御機構、32 回転角制御部、34 画像データ取得部、40 入力部、50 出力部、60 走査X線源制御機構、62 電子ビーム制御部、70 演算部、72 走査X線源制御部、74 画像取得制御部、76 3D画像再構成部、78 良否判定部、80 ステージ制御部、82 X線焦点位置計算部、84 撮像条件設定部、90 メモリ、92 X線焦点位置情報、94 撮像条件情報、100 X線検査装置。
【特許請求の範囲】
【請求項1】
対象物の検査対象領域を透過したX線を、同一平面上の複数の検出面で受光することにより、前記検査対象領域の像の再構成処理を実行するためのX線検査装置であって、
前記対象物を移動するための対象物移動機構と、
X線を出力するX線源と、
矩形の視野により、前記複数の検出面でX線を受光して撮像するための矩形のX線検出器と、
前記X線検出器を移動するための移動手段と、
前記X線検査装置の動作を制御するための制御手段とを備え、
前記制御手段は、
前記移動手段に対して、前記複数の検出面における前記X線検出器の矩形の各辺がいずれの検出面において平行かつ前記平面内で共通の方向を向くように前記X線検出器を平行移動させる制御を行う、移動制御手段と、
各前記検出面に応じた照射角度でX線が前記検査対象領域を透過して前記X線検出器に入射するように前記X線源を制御するためのX線源制御手段とを含む、X線検査装置。
【請求項2】
前記制御手段は、
各位置において前記X線検出器と前記X線源との間に前記対象物を位置づけるために、前記同一平面と平行な平面内で前記対象物を移動するように前記対象物移動機構を制御する移動機構制御手段をさらに含む、請求項1に記載のX線検査装置。
【請求項3】
前記移動手段は、前記X線検出器の移動による軌跡が円となるように、前記X線検出器を移動させる、請求項1に記載のX線検査装置。
【請求項4】
前記移動手段は、前記X線検出器が自転することなく予め定められた向きを維持するように、前記X線検出器を移動させる、請求項1または2に記載のX線検査装置。
【請求項5】
前記移動手段は、前記X線源の焦点から撮像位置における前記X線検出器までの距離が一定となるように、前記X線検出器を移動させる、請求項1から3のいずれか1項に記載のX線検査装置。
【請求項6】
前記X線源は、焦点固定型X線源を含む、請求項1から5のいずれか1項に記載のX線検査装置。
【請求項7】
前記X線検出器は、1つ以上のX線検出器を含む、請求項1から6のいずれか1項に記載のX線検査装置。
【請求項8】
対象物の検査対象領域を透過したX線を同一平面上の複数の検出面で受光することにより前記検査対象領域の像の再構成処理を実行するX線検査装置によるX線検査方法であって、
前記対象物を移動するステップと、
X線を出力するステップと、
前記X線検査装置の動作を制御するステップと、
矩形のX線検出器により、前記検出面でX線を受光して撮像するステップとを備え、
前記制御するステップは、
前記複数の検出面におけるX線検出器の矩形の各辺がいずれの検出面においても平行かつ、前記平面内で共通の方向を向くようにX線検出器を平行移動させるステップと、
各前記検出面において前記X線検出器と前記X線源との間に前記対象物を位置付けるために、前記同一平面と平行な平面内で前記対象物を移動するステップと、
各前記検出面に応じた照射角度でX線が前記検査対象領域を透過して前記X線検出器に入射するように前記X線源を制御するステップとを含む、X線検査方法。
【請求項1】
対象物の検査対象領域を透過したX線を、同一平面上の複数の検出面で受光することにより、前記検査対象領域の像の再構成処理を実行するためのX線検査装置であって、
前記対象物を移動するための対象物移動機構と、
X線を出力するX線源と、
矩形の視野により、前記複数の検出面でX線を受光して撮像するための矩形のX線検出器と、
前記X線検出器を移動するための移動手段と、
前記X線検査装置の動作を制御するための制御手段とを備え、
前記制御手段は、
前記移動手段に対して、前記複数の検出面における前記X線検出器の矩形の各辺がいずれの検出面において平行かつ前記平面内で共通の方向を向くように前記X線検出器を平行移動させる制御を行う、移動制御手段と、
各前記検出面に応じた照射角度でX線が前記検査対象領域を透過して前記X線検出器に入射するように前記X線源を制御するためのX線源制御手段とを含む、X線検査装置。
【請求項2】
前記制御手段は、
各位置において前記X線検出器と前記X線源との間に前記対象物を位置づけるために、前記同一平面と平行な平面内で前記対象物を移動するように前記対象物移動機構を制御する移動機構制御手段をさらに含む、請求項1に記載のX線検査装置。
【請求項3】
前記移動手段は、前記X線検出器の移動による軌跡が円となるように、前記X線検出器を移動させる、請求項1に記載のX線検査装置。
【請求項4】
前記移動手段は、前記X線検出器が自転することなく予め定められた向きを維持するように、前記X線検出器を移動させる、請求項1または2に記載のX線検査装置。
【請求項5】
前記移動手段は、前記X線源の焦点から撮像位置における前記X線検出器までの距離が一定となるように、前記X線検出器を移動させる、請求項1から3のいずれか1項に記載のX線検査装置。
【請求項6】
前記X線源は、焦点固定型X線源を含む、請求項1から5のいずれか1項に記載のX線検査装置。
【請求項7】
前記X線検出器は、1つ以上のX線検出器を含む、請求項1から6のいずれか1項に記載のX線検査装置。
【請求項8】
対象物の検査対象領域を透過したX線を同一平面上の複数の検出面で受光することにより前記検査対象領域の像の再構成処理を実行するX線検査装置によるX線検査方法であって、
前記対象物を移動するステップと、
X線を出力するステップと、
前記X線検査装置の動作を制御するステップと、
矩形のX線検出器により、前記検出面でX線を受光して撮像するステップとを備え、
前記制御するステップは、
前記複数の検出面におけるX線検出器の矩形の各辺がいずれの検出面においても平行かつ、前記平面内で共通の方向を向くようにX線検出器を平行移動させるステップと、
各前記検出面において前記X線検出器と前記X線源との間に前記対象物を位置付けるために、前記同一平面と平行な平面内で前記対象物を移動するステップと、
各前記検出面に応じた照射角度でX線が前記検査対象領域を透過して前記X線検出器に入射するように前記X線源を制御するステップとを含む、X線検査方法。
【図1】

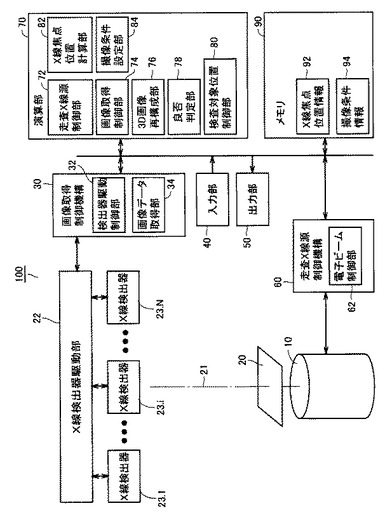
【図2】
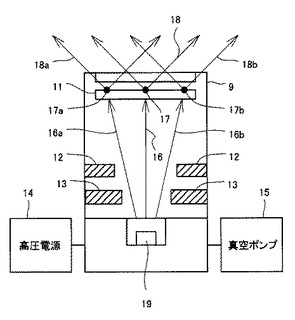
【図3】
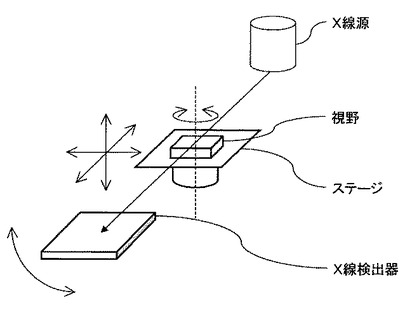
【図4】
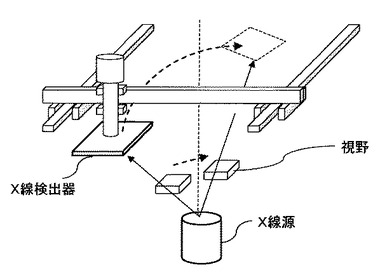
【図5】
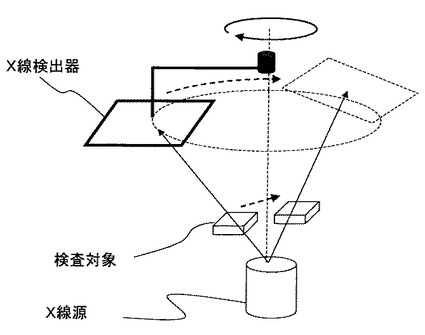
【図6】
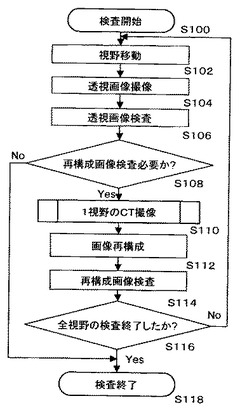
【図7】
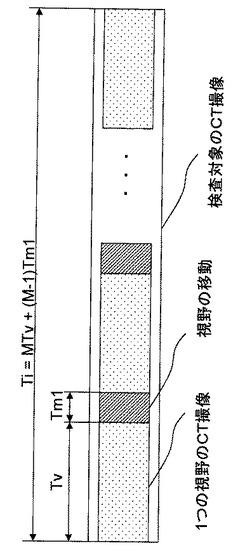
【図8】
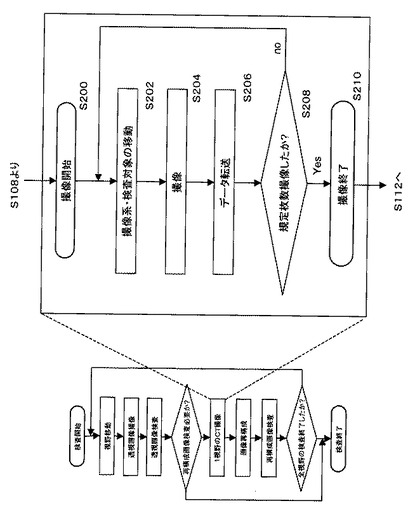
【図9】
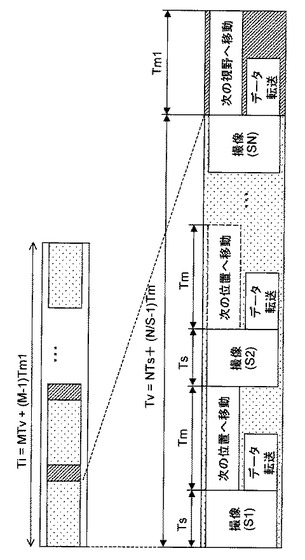
【図10】
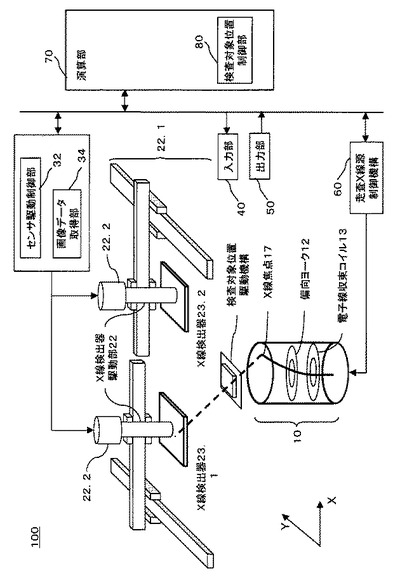
【図11】
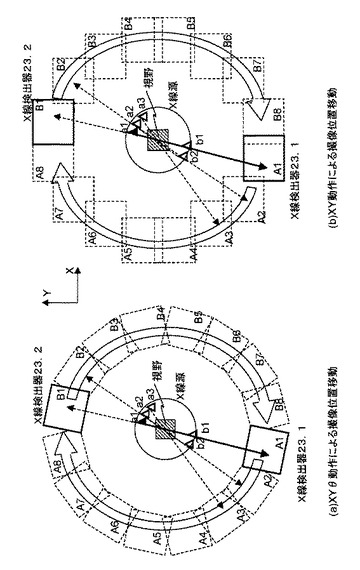
【図12】

【図13】
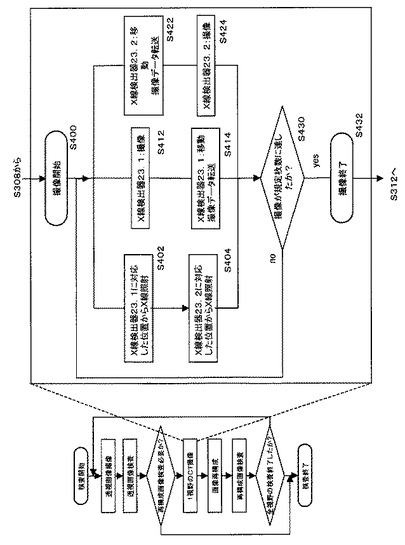
【図14】
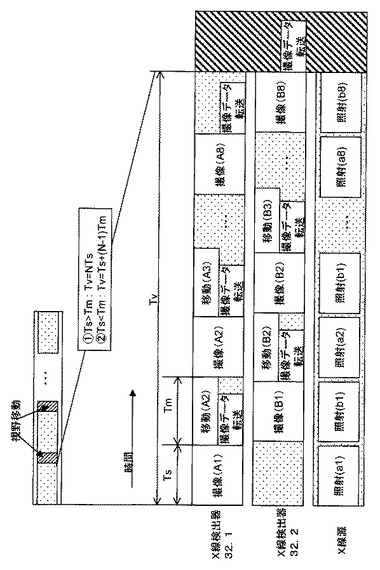
【図15】
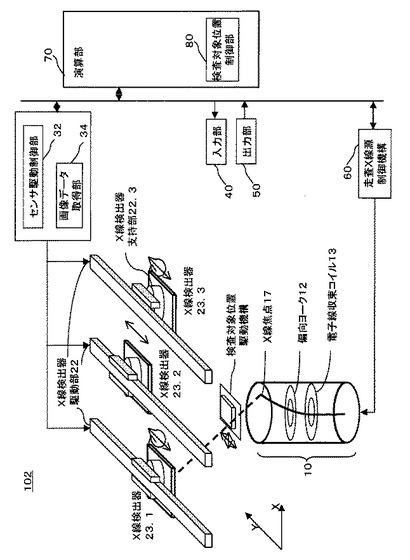
【図16】
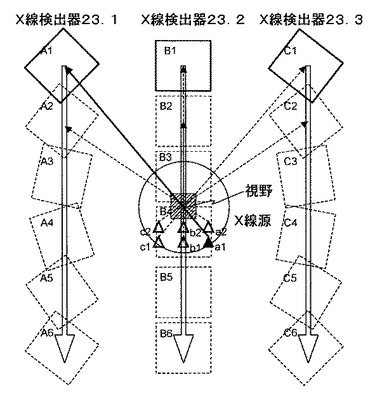
【図17】
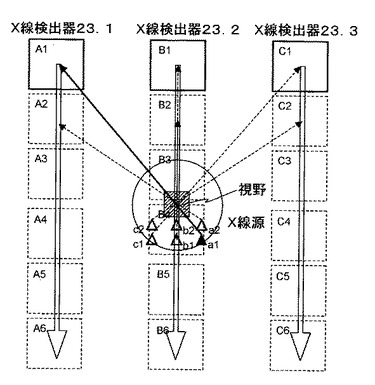
【図18】
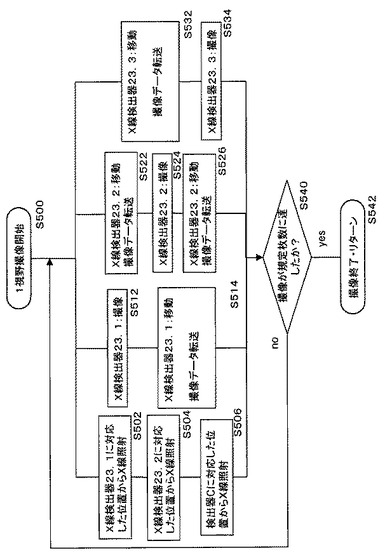
【図19】
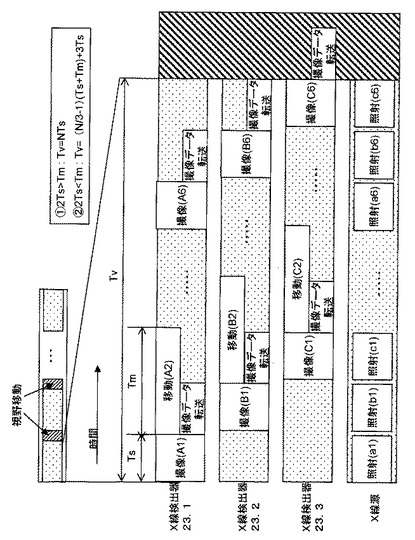
【図20】
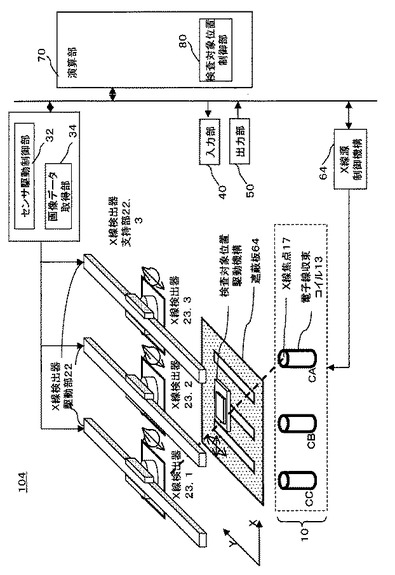
【図21】
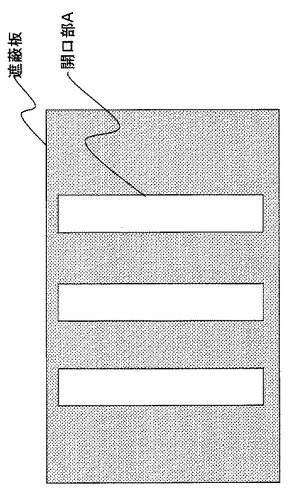
【図22】
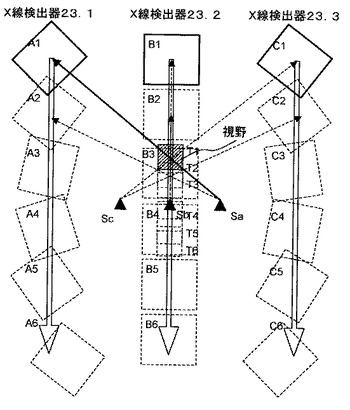
【図23】
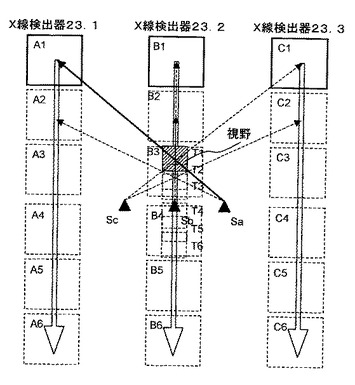
【図24】
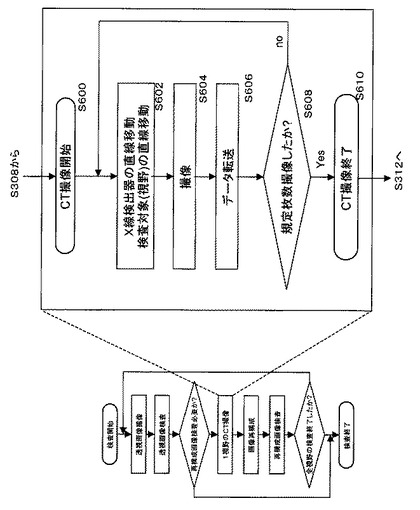
【図25】
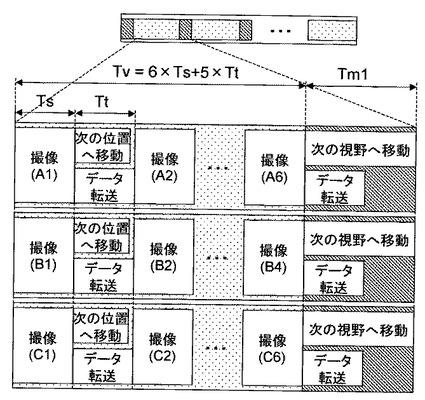
【図26】
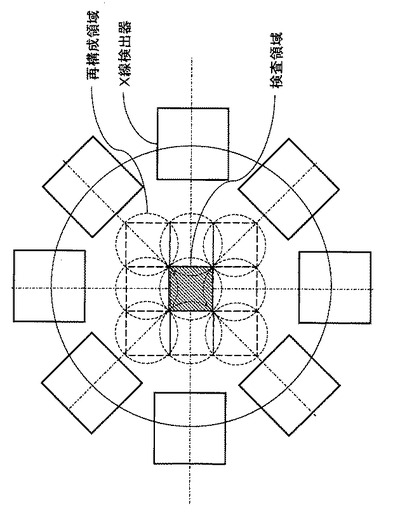
【図27】
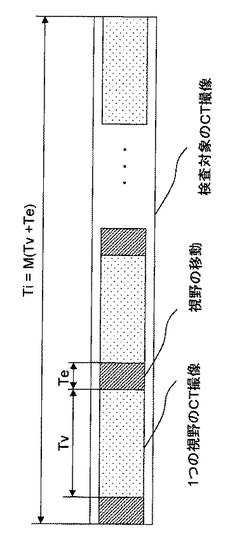
【図28】
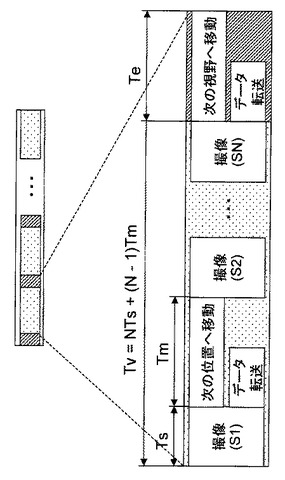
【図29】
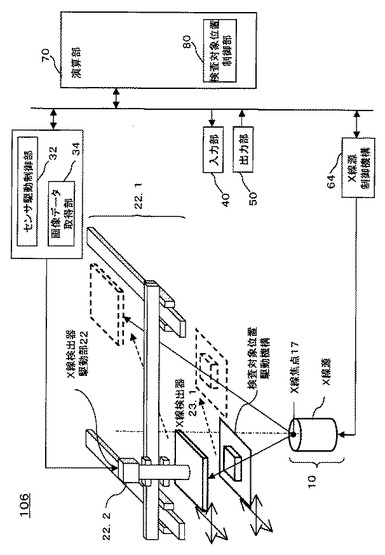
【図30】
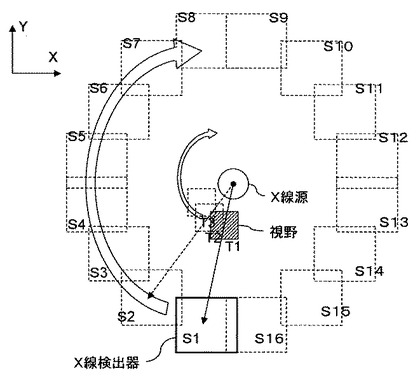
【図31】
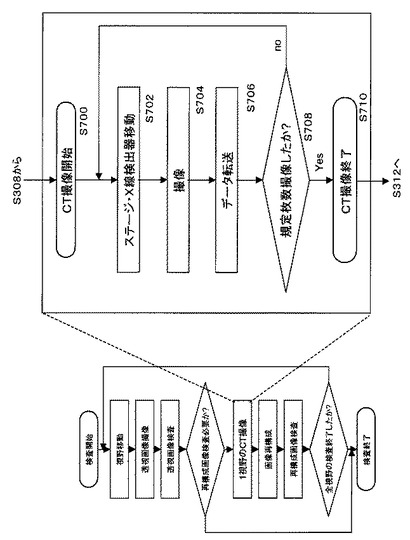
【図32】
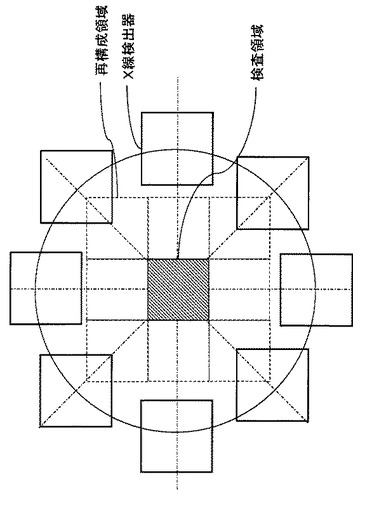
【図33】
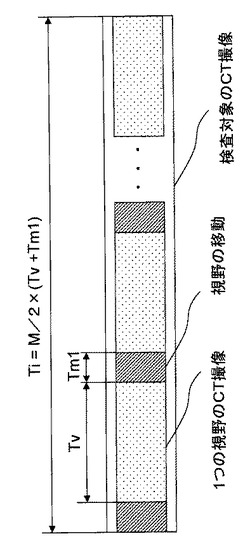
【図34】
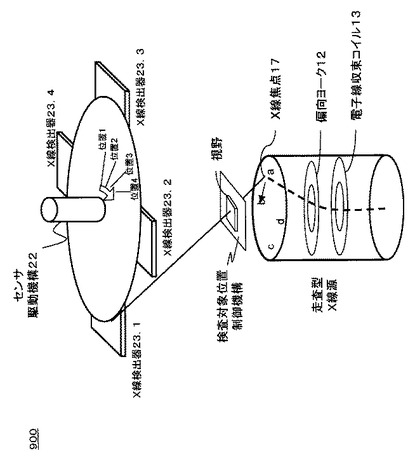
【図35】
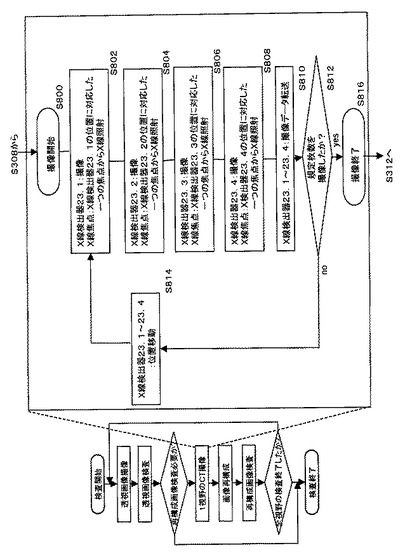
【図36】
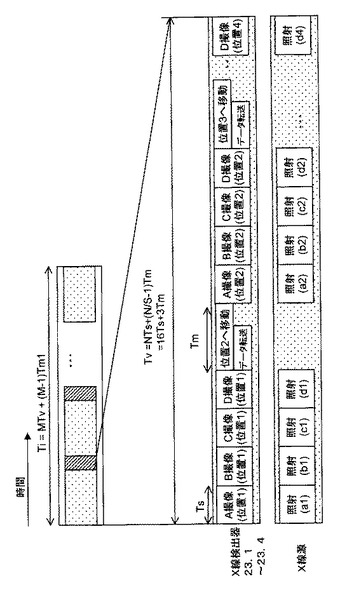
【図37】
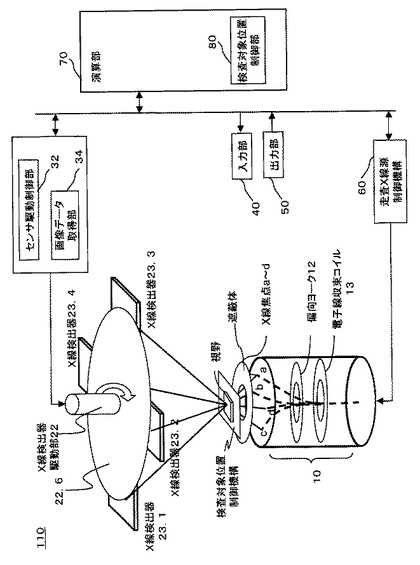
【図38】
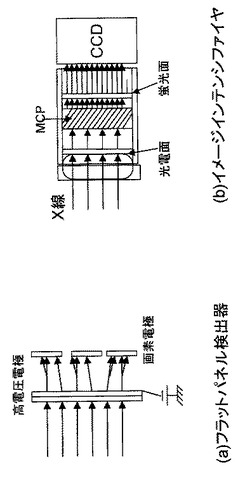
【図39】
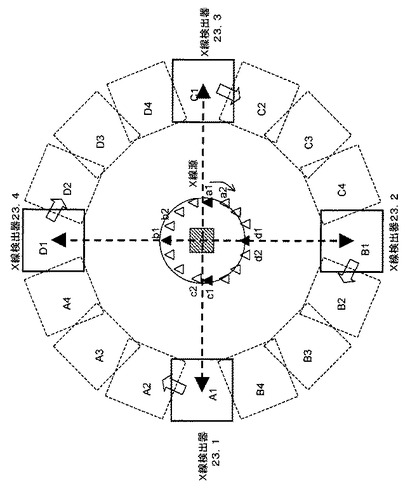
【図40】
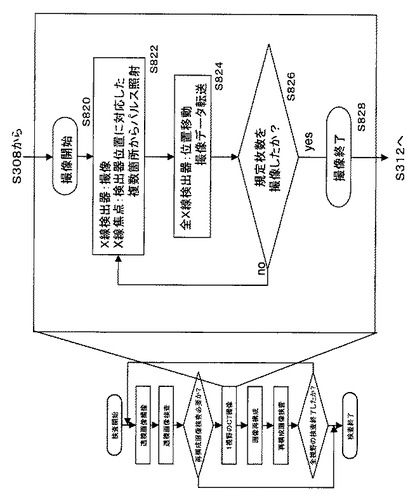
【図41】
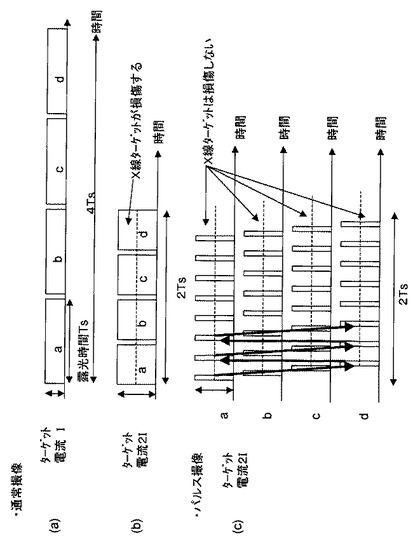
【図42】
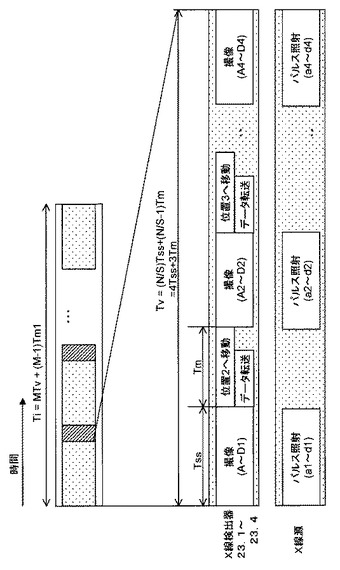
【図43】
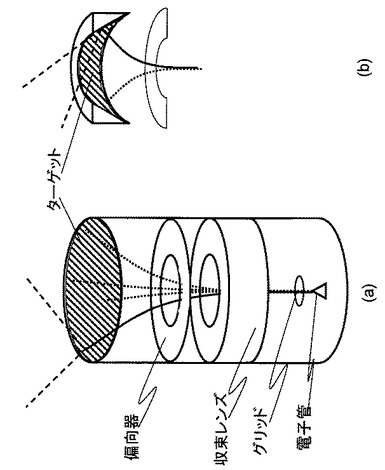
【図44】
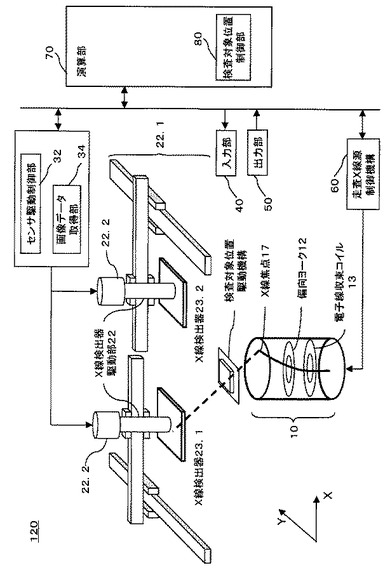
【図45】
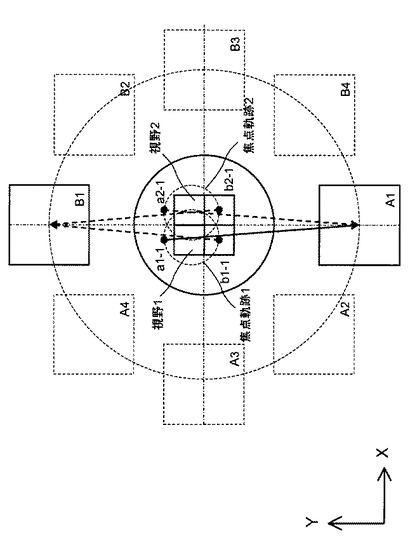
【図46】
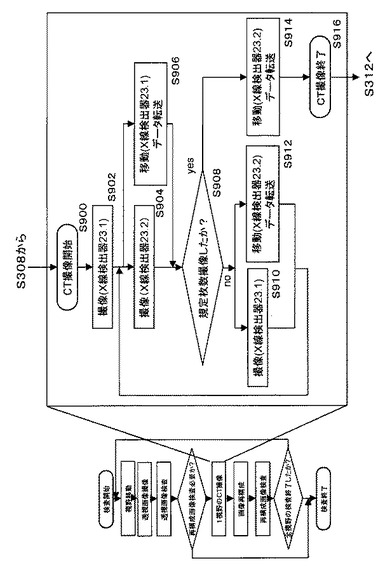
【図47】
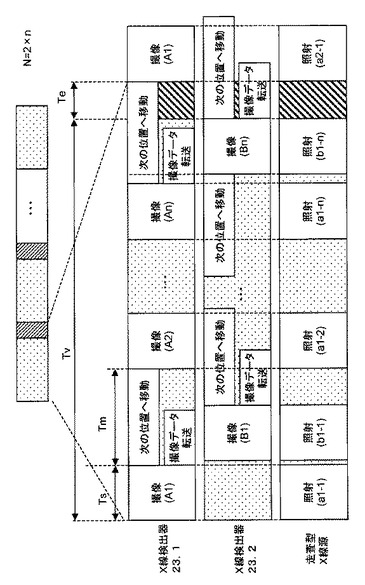
【図48】
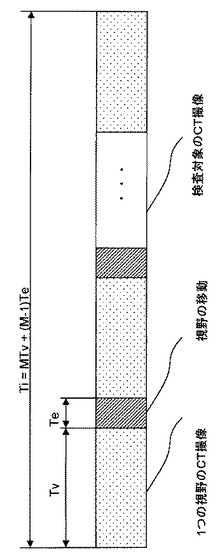
【図49】
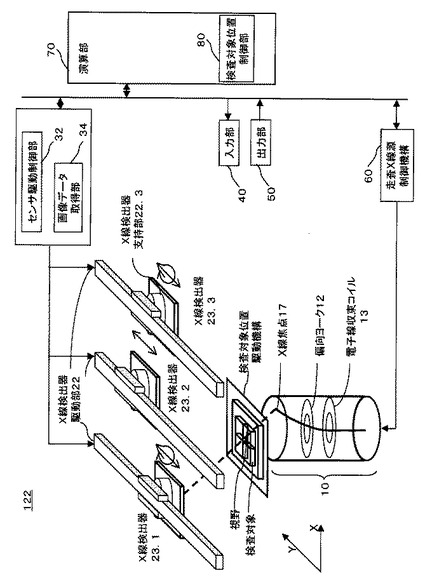
【図50】
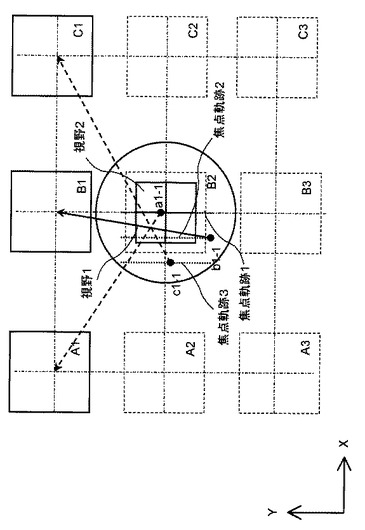
【図51】
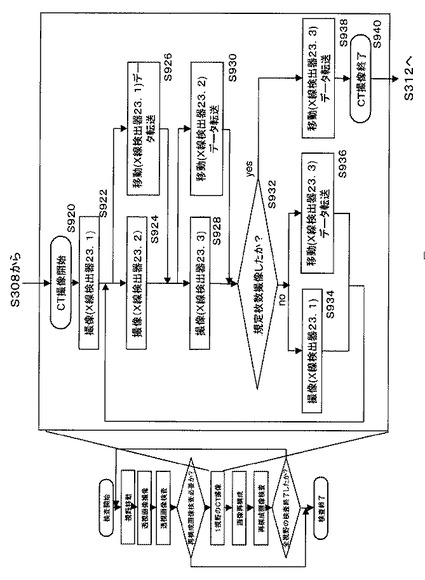
【図52】
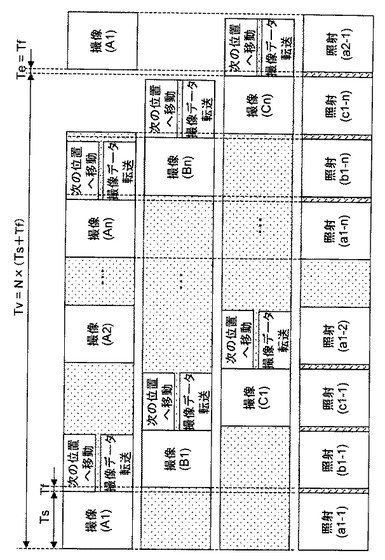
【図53】
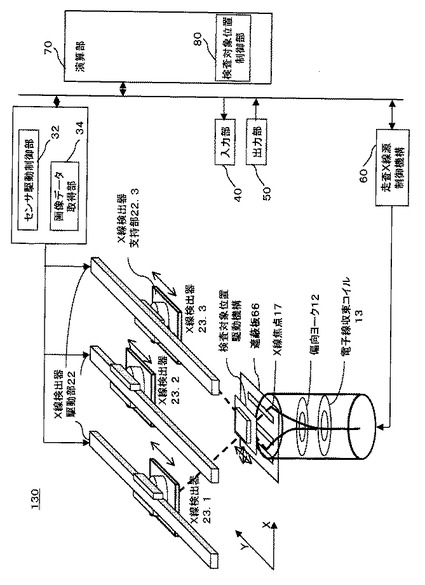
【図54】
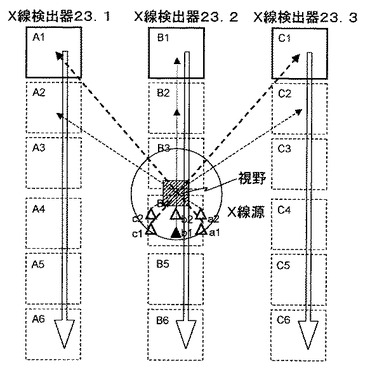
【図55】
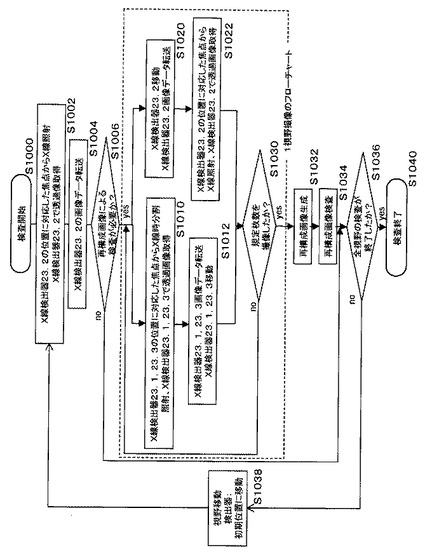
【図56】
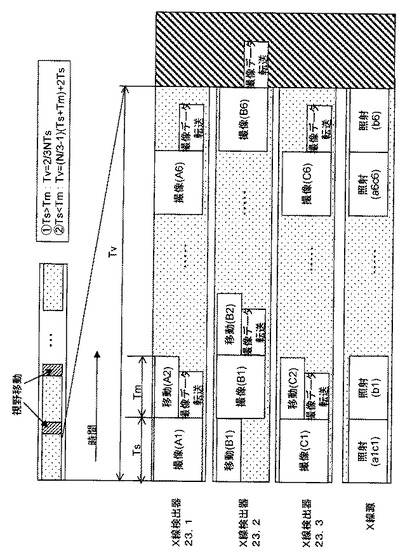
【図57】
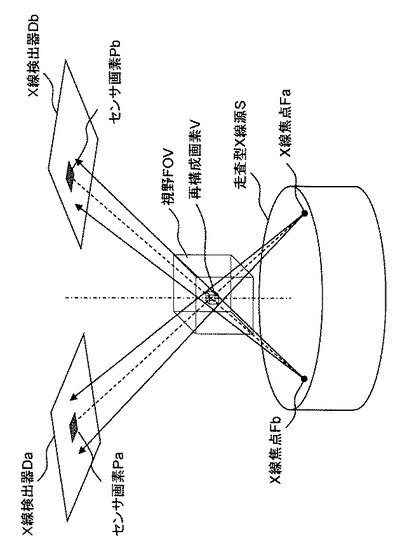
【図58】
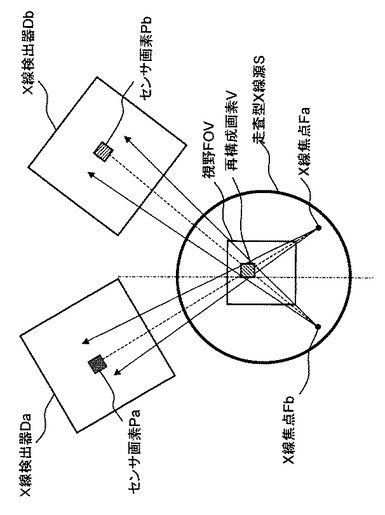
【図59】
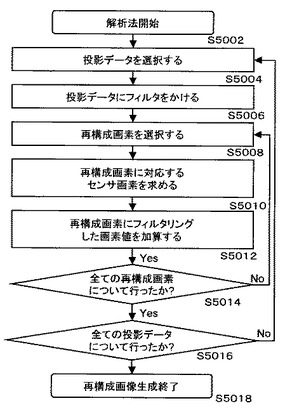
【図60】
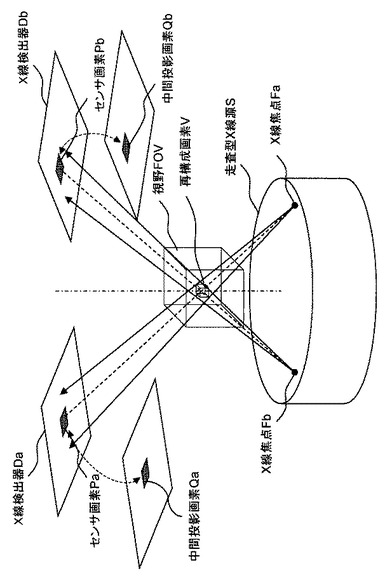
【図61】
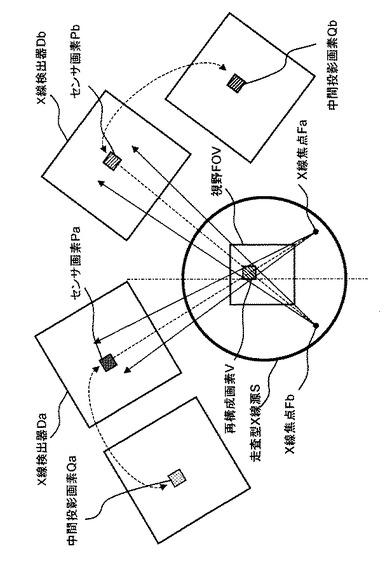
【図62】
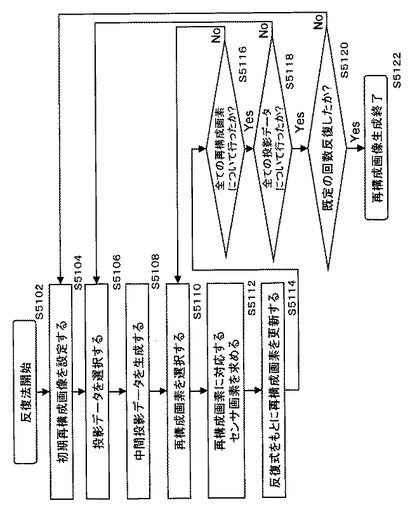
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【公開番号】特開2010−133982(P2010−133982A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2010−57524(P2010−57524)
【出願日】平成22年3月15日(2010.3.15)
【分割の表示】特願2007−337572(P2007−337572)の分割
【原出願日】平成19年12月27日(2007.12.27)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成22年3月15日(2010.3.15)
【分割の表示】特願2007−337572(P2007−337572)の分割
【原出願日】平成19年12月27日(2007.12.27)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]