
X線治療装置
【課題】新しい技術により微細なX線ビームの発生を可能にして、MMRT(Microbeam Modulated Radiation Therapy)という迅速で精密なX線治療を可能にする。
【解決手段】本発明によるX線治療装置は、マーカセンサ3,4により、患部に対して既知の位置関係を保って患者に固定されるマーカのカウチ2に対する位置を検出し患部位置データを得る。カウチ操作ロボット6は、カウチ2の位置・姿勢を変更させることができる。治療用X線源(治療用X線発生装置1)は、X線治療ビームの形状、強度を制御可能であり、操作ロボット5は治療用X線発生装置1を支持して患部に向けて、治療用X線発生装置1の位置・姿勢を制御する。中央処理装置(CPU)8は、治療計画データに基づいて、マーカセンサ3,4の出力により特定された患部に対して必要なX線治療ビームの強さと方向と時間を演算して治療用X線発生装置1と操作ロボット5,6(線源,カウチ)に制御信号を送り動作させる。
【解決手段】本発明によるX線治療装置は、マーカセンサ3,4により、患部に対して既知の位置関係を保って患者に固定されるマーカのカウチ2に対する位置を検出し患部位置データを得る。カウチ操作ロボット6は、カウチ2の位置・姿勢を変更させることができる。治療用X線源(治療用X線発生装置1)は、X線治療ビームの形状、強度を制御可能であり、操作ロボット5は治療用X線発生装置1を支持して患部に向けて、治療用X線発生装置1の位置・姿勢を制御する。中央処理装置(CPU)8は、治療計画データに基づいて、マーカセンサ3,4の出力により特定された患部に対して必要なX線治療ビームの強さと方向と時間を演算して治療用X線発生装置1と操作ロボット5,6(線源,カウチ)に制御信号を送り動作させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、X線治療を行うにあたり、患者の呼吸等により患部が移動して患部以外にX線が及ぶことによる正常組織の損壊を防止することができるX線治療装置に関する。
さらに詳しく言えば、本発明は、MMRT(Microbeam Modulated Radiation Therapy)という新しい技術により微細なX線ビームの発生を可能にして、迅速で精密なX線治療を可能にするX線治療装置に関する。
【背景技術】
【0002】
X線治療装置を用いてX線治療を行う際に、患者の呼吸等により患部が移動することで患部以外にX線が及ぶことによる正常組織の損壊が問題になり、これらに関連して種々の提案が行われている。
特許文献1記載の放射線治療装置は、治療用X線を照射する放射線発生装置と、検査用X線を出射する2つの放射線源と、2つの検出器と、画像形成装置と、解析装置とを備えている。検査対象部の3次元画像から追尾対象部位の3次元位置および3次元形状を求め、これに合わせて出射口可変式コリメータの出射口の形状を制御装置によって変化させて、治療対象部位に応じて治療用放射線の照射野を追尾させるように構成されている。
この装置は出射口可変式コリメータの出射口の形状を変化させることによって、治療対象部位の移動に追従させるため、コリメータの形状設定が完了するまで放射線の照射は行えない。照射野に対する形状的精度は、コリメータの形状設定精度に依存し、高速性と高分解能は相反して同時にこれらを満足させられないという問題がある。
【0003】
特許文献2記載の発明は、患者の呼吸を照射のタイミングと同期がとりやすいように誘導し、効率よく放射線の照射を行うことができる放射線発生装置を用いて、患者の呼吸を治療装置や診断装置の運転に適した状態に誘導し、診断および治療を効率的に行うことができる放射線治療装置および放射線診断装置を提案している。しかし患者の動きにリアルタイムに追従した治療はできないという問題がある。
【0004】
特許文献3記載の放射線治療装置は、腫瘍近傍に少なくとも3個の腫瘍マーカを埋め込み、これらの腫瘍マーカを2方向からX線透視装置で撮像し、この撮像された透視像をデジタイズし、予め登録された腫瘍マーカのテンプレート画像との間で濃淡正規化相互相関法によるテンプレートマッチングを所定フレームの実時間レベルで実行し、デジタイズされた透視象上でもっとも相関度の高い3個の腫瘍マーカの2次元座標を求めている。そして、この2次元座標に基づき少なくとも3個の腫瘍マーカの3次元座標、アイソセンタ位置等を計算して、当初計画されたアイソセンタ位置等とのずれを補正し、体幹内部の腫瘍に選択的に大線量の照射を行い、健全細胞の被爆の低減を可能にしている。
しかしながら、連続照射の速度は、腫瘍マーカの位置認識とコリメータの設定時間で制約を受けるので、一層の高速化は難しい。また、腫瘍の縁端部に対する照射の場合、コリメータを使用しているため、微小な照射は難しく、健全細胞へのダメージは残る。
【0005】
特許文献4記載の動体追跡照射装置は、腫瘍近傍に埋め込まれた腫瘍マーカを第1の方向から撮像する第1のX線透視装置と、腫瘍マーカを第2の方向から第1のX線透視装置と同時に撮像する第2のX線透過装置と、画像入力部A,Bによってデジタイズされた画像情報に予め登録された腫瘍マーカのテンプレート画像を作用させた濃淡正規化相互相関法によるテンプレートマッチングを所定フレームレートの実時間レベルで実行し、前記腫瘍マーカの2次元座標を求める認識処理部A,Bと認識処理部で算出された2次元座標より腫瘍マーカの3次元座標を計算するCPUと腫瘍マーカの3次元座標によりライナックの治療ビーム照射を制御する照射制御部とを備えている。そして体幹部内の動き回る腫瘍に対しても選択的に大線量の照射を行い、健全細胞への被爆の低減を図っている。
しかしながら、特許文献3で検討したように連続照射の速度は、腫瘍マーカの位置認識とコリメータの設定時間で制約を受けるので、一層の高速化は難しい。また、腫瘍の縁端部に対する照射の場合、コリメータを使用しているため、微小な照射は難しく、健全細胞へのダメージは残る。
【0006】
特許文献5記載の治療中の患者の呼吸および他の移動を補償する装置は、内部標的領域に関する位置データを周期的に発生する第1検出装置と、1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、治療が外部センサから得た位置データに基づいて患者の標的領域の位置に向けてなされるように内部標的領域の位置と外部センサの位置との対応関係を創成すべく、内部標的領域および外部センサに関する位置データを受けるプロセッサとを有することを特徴としている。
しかしながら、連続照射の速度は、腫瘍マーカの位置認識とコリメータの設定時間で制約を受けるので、一層の高速化は難しい。
また、腫瘍の縁端部に対する照射の場合、コリメータを使用しているため、微小な照射は難しく、健全細胞へのダメージは残るという問題がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3790481号公報
【特許文献2】特許第3881199号公報
【特許文献3】特許第3748531号公報
【特許文献4】特許第3053389号公報
【特許文献5】特表2003−523220号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述した各装置は、解決されるべき次の課題を含んでいる。
・連続照射ができないため、治療に時間がかかり、患者の精神的・肉体的負担が大きくなる。
・X線治療の結果に対する検証(Verification)の精度が低い上に操作が煩雑であった。
・X線ビームの直径を小さくすることができないから患部周辺の健全細胞を損傷することなく、腫瘍等を完全に除去することは困難である。
・ガントリを用いるものが殆どでX線の照射方向に制限があり、任意の方向から最適な角度での照射が制限されている。
本発明の目的は、患者の治療対象部位の動きにリアルタイムに追従することができ、しかも高出力で細いX線(Microbeam)を用い、患部の健全な細胞へ悪影響を及ぼすことなく、患部の外形(治療対象腫瘍の形状)に沿って高速、高精度にX線治療を行うことができるX線治療装置を提供することにある。
【課題を解決するための手段】
【0009】
前記目的を達成するために本発明による請求項1記載のX線治療装置は、
カウチに仰臥した患者に、異なる位置からのX線ビームを患部で交差または患部に通過させて一回以上のX線照射治療をするX線治療装置であって、
患部に対して既知の位置関係を保って患者に固定されるマーカのカウチに対する位置を検出し患部位置データを得るマーカセンサと、
カウチの位置・姿勢を変更させるカウチ操作手段と、
X線治療ビームの形状、線量を制御可能な治療用X線源と、
前記治療用X線源より照射され、患部を透過したX線を検出する治療用X線センサと、
前記治療用X線源を支持して患部に向けて、前記治療用X線源の位置・姿勢を制御する線源操作手段と、
治療計画データに基づいて、前記マーカセンサの出力により特定された患部におけるX線治療ビームの形状、線量を演算して前記治療用X線源と前記各操作手段に制御信号を発生する中央処理装置と、から構成されている。
マーカは患部に対して既知の位置関係を保って患者に固定されるから、マーカを検出することによりカウチに対する患部の位置が明らかになり、治療用X線源を患部に向けて、適切な照射による治療が可能となる。
【0010】
本発明による請求項2記載のX線治療装置は、請求項1記載のX線治療装置において、
前記線源操作手段は、6軸または7軸ロボットアームのヘッドに前記治療用X線源を支持するものであることを特徴とする。
これにより、患部に向かう広い立体角内からのX線の治療が可能となる。
また、本発明による請求項3記載のX線治療装置は、請求項1記載のX線治療装置において、
前記線源操作手段は、前記治療用X線源を支持して前記カウチの移動と共同して自由にX線治療ビームの方向を決定するガントリであるかまたは環状回転構造であることを特徴とする。
【0011】
本発明による請求項4記載のX線治療装置は、請求項1記載のX線治療装置において、
前記治療用X線源は、1MV以上の高エネルギーX線を発生し、ビーム径が1mm〜10mm程度の細いX線ビームを出力するX線管を複数本束ねたX線管アレイにより構成されている。
これにより精密な治療ができる。
また、本発明による請求項5記載のX線治療装置は、請求項4記載のX線治療装置において、
前記治療用X線源のX線管の動作選択は治療計画データにしたがって行われることを特徴とするものである。
このような請求項4,5記載の構成によれば、従来マルチコリメータにより形成されていた治療用のX線ビームの(断面)形状の変更をX線管の各束の要素(1mm〜10mm程度の細いX線ビーム)の動作選択による組み合わせにより無限の形状にかつリアルタイムで変更することができ、複雑な患部の治療が可能になる。
このX線ビームの(断面)形状の設定や変更は、後述するように一連のX線照射治療中にリアルタイムで行われ、治療の質の向上と、治療時間の短縮に寄与している。
【0012】
本発明による請求項6記載のX線治療装置は、請求項1記載のX線治療装置において、
前記マーカセンサの検出対象であるマーカは人体に無害な重金属であり、前記マーカセンサはカウチに固定された患部に向けられる二つの低エネルギーX線発生装置とそれぞれに対応する画像センサであり、患部とマーカの像を出力することを特徴とするものである。
このX線治療装置によって、カウチとの関係で患部の位置が特定できる。
また、本発明による請求項7記載のX線治療装置は、請求項1記載のX線治療装置において、
前記二つの低エネルギーX線発生装置とそれぞれに対応する画像センサはガントリに設けられていることを特徴とするものである。
【0013】
本発明による請求項8記載のX線治療装置は、請求項1記載のX線治療装置において、
前記マーカセンサの検出対象は、患部と一定の位置関係をもち患部と同一の動きを示す電波発信機であり、前記マーカセンサは受信機であることを特徴とするものである。
【0014】
本発明による請求項9記載のX線治療装置は、請求項1記載のX線治療装置において、
X線照射治療は治療計画データに基づいて、複数回の一連の照射が行われるものであり、
低エネルギーX線を照射してマーカの位置を検出し予め治療計画で取得したマーカ及び患部の画像データと比較照合して確認し、
治療用高エネルギーX線を照射して、その透過X線を前記治療用X線センサで検出して確認し、必要に応じて治療計画データを修正して次期の照射を行うことを特徴とするものである。
この治療用X線センサは、治療後のX線治療検証(Verification)にも用いられる。
また、本発明による請求項10記載のX線治療装置は、請求項9記載のX線治療装置において、
前記X線治療装置は、X線治療ビームの形状、線量を前回までの治療用X線センサの画像データまたはマーカ及び患部の画像データのいずれかまたはそれらの組み合わせに基づいて修正することを特徴とするものである。
これにより、X線治療の要素を変更しながら一連の治療が実現でき、患者の負担を少なくした精密な治療が可能になる。
さらに、本発明による請求項11記載のX線治療装置は、請求項1記載のX線治療装置において、
高エネルギーX線を検出する治療用X線センサは、前記カウチに取り付けられていることを特徴とするものである。
【発明の効果】
【0015】
前記構成によれば、患者の治療対象部位の動きにリアルタイムに追従することができ、しかも高出力で細いX線(Microbeam)を用い、患部の健全な細胞へ悪影響を及ぼすことなく、患部の外形(治療対象腫瘍の形状)に沿って高速、高精度にX線治療(Microbeam Modulated Radiation Therapy)を行うことができるX線治療装置を提供できる。
【図面の簡単な説明】
【0016】
【図1A】本発明によるX線治療装置の実施形態を示す斜視図である。
【図1B】本発明によるX線治療装置の実施形態を示すブロック図である。
【図2A】本発明によるX線治療装置で用いるX線源の実施例を示すブロック図である。
【図2B】本発明によるX線治療装置で用いる前記X線源の動作を示す説明図である。
【図2C】前記X線源の電子ビームの偏向を説明するための説明図である。
【図2D】本発明によるX線治療装置で用いる他のX線源の実施例を示すブロック図(a)および、(a)のX線ターゲット管アレイのA−A視図(b)である。
【図2E】前記他のX線源の偏向電磁石の断面図である。
【図2F】前記他のX線源のX線ターゲットの照射野について説明する図である。
【図3A】動体追跡技術で用いられる線源とセンサ一組を取り出して示した斜視図である。
【図3B】動体追跡技術の動作を説明するための略図である。
【図4】本発明によるX線治療装置の線源の照射動作を説明するための波形図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の実施の形態を詳しく説明する。
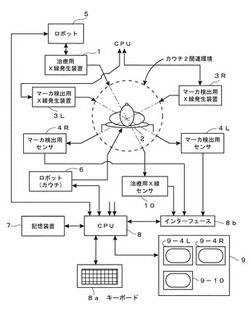
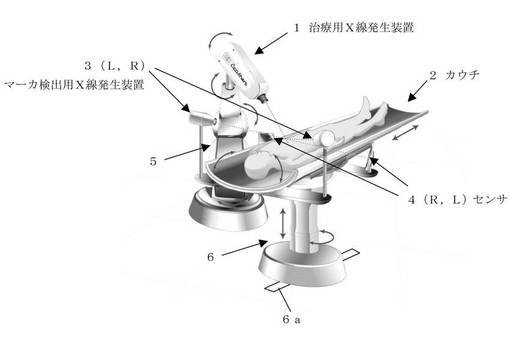
図1Aは、本発明によるX線治療装置の実施形態を示す斜視図であり、図1Bは前記装置のブロック図である。以下の実施の形態は、患部が腫瘍である場合について記述されている。
前記装置において基準点(物理学的な体)に対して患部と治療用X線源の放射方向と位置は調整され、異なる位置からのX線ビームが患部で交差または近接通過することにより、X線ビームのエネルギー密度の上昇により患部(腫瘍)の組織が破壊(治療)される。マーカmは患部に対して既知の位置関係を保って患者に固定される。
マーカセンサの検出対象であるマーカmは、人体に安全でX線の吸収が大きいAu、Ptなどの重金属である。
マーカセンサはカウチ2に固定されて患部に向けられる2つの低エネルギーX線発生装置(マーカ検出用低エネルギーX線発生装置3(L,R))とそれぞれに対応する画像センサ(マーカ検出用センサ4(L,R))を含んでいる。この2組のマーカセンサにより、マーカmのカウチ2に対する空間的位置とマーカmと既知な関係にある腫瘍の情報が得られる。この腫瘍の位置の特定については項を分けて(動体追跡技術)として後述する。
【0018】
カウチ2の位置はカウチ位置姿勢制御手段により変更させられる。
カウチ位置姿勢制御手段はカウチ2を支持して、カウチ2を基準平面(例えば本装置が設置された空間の水平面)に対して上下、この上下軸回りの回転、前記水平面に平行な軸回りの回転、前記軸方向に進退させることができる(図1A参照)。
カウチ2に対するマーカmの位置を検出するマーカセンサは当然カウチ2と一体に移動させられることにより、マーカmのカウチ2に対する3次元位置を特定する。
【0019】
治療用X線源(治療用X線発生装置1)は治療ビームの形状、強度が制御可能である。この装置の詳細な構成は項を分けて(X線源の第1の実施例,第2の実施例)として後述する。
操作ロボット5は治療用X線発生装置1を支持して、患部に向けて治療用X線発生装置1の位置、方向を制御する。操作ロボット5は6軸または7軸ロボットアームにより、治療用X線発生装置1を支持している。
操作ロボット5とは別の、カウチ2を操作するためのロボット6が設けられている。
このロボット6は操作ロボット5に対して床面における相対位置を調節(例えば6aの方向の移動)ができるように設けられており、その位置において垂直軸方向の上下移動、同軸回りの回転、カウチ2の中心軸回りの回転を可能にしている。
【0020】
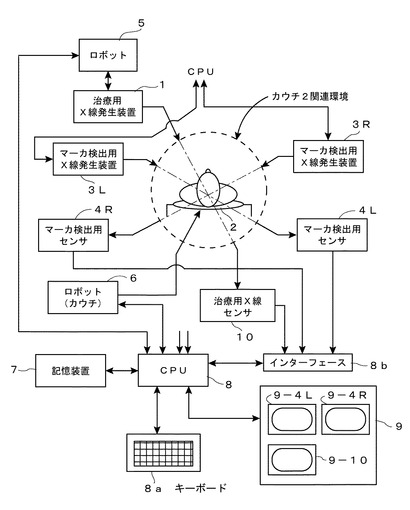
図1Bは、前述した実施形態をブロック図に示したものである。
治療用X線発生装置1は、ロボット5に支持されており、カウチ2側にフラットパネルを検出器として用いた治療用X線センサ10が設けられている。
治療用X線センサ10は、治療用X線の位置、強度、方向などの治療中の患部の照射状態を検出するためのセンサであり、治療用X線発生装置1が動作中に患部を透過して到達する透過X線を検出するためにカウチ2に関連して設けられ、ロボット6によりカウチ2とともに移動させられるか、または治療用X線発生装置1の移動に追従して移動するように更に他のロボット(図示せず)によりカウチ2の下側の空間でカウチ2に対しても移動できるように設けられている。また治療用X線発生装置1の出力を低下させてX線治療後の患部の状態を知るためのセンサとして使用することも可能である。
マーカセンサの一対のマーカ検出用X線発生装置3(L,R)の出力はマーカ検出用センサ4(L,R)に取り込まれインターフェース8bを介してCPU8に取り込まれ、表示装置9(マーカ検出用センサ4Lの出力は9−4L、4Rの出力は9−4Rに、治療用X線センサ10の出力は9−10)で表示されるとともに記憶装置7に蓄積される。
なお、8aはキーボード等の入力装置である。
【0021】
この実施形態では事前に、またはマーカセンサ3,4により得られたデータにより策定された治療計画データに基づいて、中央処理装置(CPU)8は、マーカセンサの出力により特定された患部に対して必要なビームの強さと方向と時間を演算し、ロボット5の動作を指示または動作終了後に治療用X線発生装置1用のX線源を作動させる。
なお医者の位置には表示装置9が設けられ、治療の状態を観測できるようにしてある。
【0022】
腫瘍の近傍に埋め込まれた金属マーカmにマーカ検出用X線を照射して、腫瘍の動きを捉える。マーカ検出用X線発生装置3と照射されたX線を検出するマーカ検出用センサ4はカウチ2に2組設置される。マーカ検出用X線のエネルギーは、X線の照射をパルス状に10万発以上照射しても細胞に悪影響を与えないように、低いエネルギーレベルに設定する。照射されたマーカ検出用X線は、直交する2方向から照射されて患者を透過して、埋め込まれたマーカmの画像をカウチ2に設置されたフラットパネルなどのマーカ検出用センサ4に結ぶ。
カウチ2に関連して、前述した治療用X線センサ10も設置されていて、X線ビームの強度や照射位置と方向を検出する。このデータは、次の治療用X線照射の制御に使用されるが、その他に、治療後に治療計画通りの照射が実施されたか検証(Verification)するときの重要なデータとなる。これによって、治療後の検証が容易になり、医師の負担を軽減できる。
【0023】
(X線照射治療単位の説明)
治療用X線と腫瘍マーカ検出用X線の照射タイミングは、以下に説明する図の通りである。
図4の(A)は、治療用X線の照射タイミング図、図4の(B)はマーカ検出用X線の照射タイミング図である。
治療用X線(治療用X線発生装置1による)照射の間隙にマーカセンサのマーカ検出用X線発生装置3からのX線を照射してマーカの位置検出を行い、この検出結果に基づいて治療用X線を照射する。治療用X線照射は、200パルス/秒を10分間程度継続する。1パルスのマイクロビームX線のエネルギーは、健全な細胞にダメージを与えるレベルではない。
治療対象の腫瘍には、後述するように治療計画で定めた特定の方向(略全方位中から選択される)から約12万パルスのマイクロビームX線が集中するので、癌細胞を破壊するのに十分な線量分布を得ることができる。
【0024】
(治療計画に基づく治療)
本願発明のX線治療装置による治療は、本願発明装置のセンサによって得たデータ、他の検査装置等で得たデータを医師が総合判断して、策定された基本治療計画に基づいてなされる。基本治療計画は一連の照射における、X線ビームの方向、X線ビームの形状、X線ビームの強度を含んでいる。
(1)マーカ検出用X線発生装置3を起動して、低エネルギーX線を患部とマーカを含む領域に照射してマーカの位置を検出し、予め策定された基本治療計画で取得したマーカ及び患部の画像データと比較照合して確認する。
(2)治療用X線発生装置1を起動して、基本治療計画の定めるビーム形状、強度を備える治療用高エネルギーX線を患部に向けて照射する。
(3)前記照射は同時に治療用X線センサ10で検出され確認される。
(4)前記(3)の結果に基づき次の照射の要素(強度の増減、ビーム形状の変更)の一部を変更して、次の(1)→(2)を続行する。
【0025】
以上により、本発明によるX線治療装置は、X線治療ビームの形状、線量を前回までの治療用X線センサまたはマーカ及び患部の画像データのいずれかまたはそれらの組み合わせに基づいてリアルタイムで修正し、最適な治療を実施できる。
【0026】
本発明による装置で使用する特に治療用の線源はMMRT(Microbeam Modulated Radiation Therapy)という新しい技術に適合するように、本件発明者が開発したものであって平成19年12月13日に発明の名称「X線発生装置」(特願2007−322483)としてすでに出願されている。
以下このX線源を本発明による治療装置との関連で説明する。
【0027】
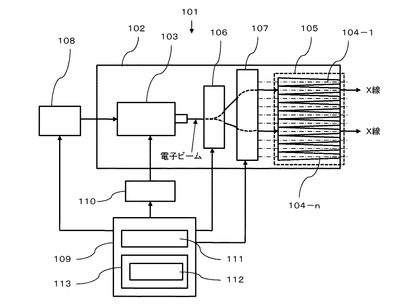
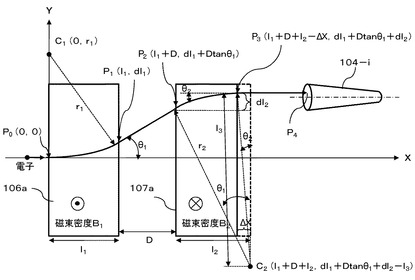
(X線源の第1の実施例)図2Aは、本発明によるX線治療装置で用いるX線源の実施例を示すブロック図、図2Bは、前記X線源の動作を示す説明図であり、図2Cは、前記X線源の電子ビームの偏向を説明するための説明図である。
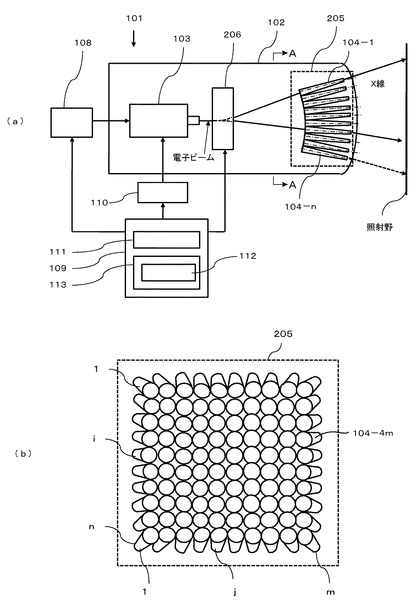
図2Aに示すように、X線発生装置101は、真空容器102の中に、高エネルギー電子ビームを照射する電子源(以下、電子銃という。)103と、電子銃103が照射した高エネルギー電子ビームを衝突させてX線ビームを放射する複数のX線ターゲット管104−1〜104−nを単列に並べて構成したX線ターゲット管アレイ105と、電子銃103が照射した高エネルギー電子ビームの進行方向を偏向する第1偏向電磁石106および第2偏向電磁石107とを備える。
【0028】
真空容器102の外部に、電子銃103に高エネルギーパルスを所定のタイミングで出力する電力源108と、電子銃103に高電圧のマイクロ波を供給するマイクロ波源110と、電力源108、マイクロ波源110、第1偏向電磁石106および第2偏向電磁石107を制御するコントローラ109とを備える。
【0029】
コントローラ109には、照射制御プログラム111、X線ターゲット管アレイ105の照射野の照射強度データ112から構成される治療野の照射強度データ113が格納される。照射野の照射強度データ112は、X線ターゲット管アレイ105を構成するX線ターゲット管104−1〜104−n毎に照射線量を定めたものである。
【0030】
照射制御プログラム111は、電子銃103から照射された高エネルギー電子ビームが単列に並んだX線ターゲット管104−1〜104−nに順番に入射するように高電圧マイクロ波源110の制御、第1偏向電磁石106および第2偏向電磁石107の励磁動作を制御し、さらに電力源108から出力される高エネルギーパルスの幅を制御する。
【0031】
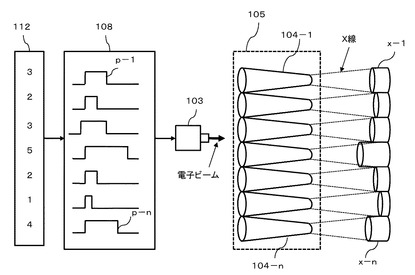
図2Bはこの実施例の照射野の照射強度データに対応してX線ターゲット管アレイの照射野が強度変調される様子を示している。図2Bに示すように、電力源108から所望の照射線量に対応する高エネルギーパルスp−1〜p−nが出力されると、電子銃103より順次、高エネルギーパルスp−1〜p−nに対応した電子ビームが照射され、X線ターゲット管アレイ105を構成するX線ターゲット管104−1〜104−nの内壁に衝突して、X線ビームx−1〜x−nを放射する。X線ビームx−1〜x−nは、照射野の照射強度データ112に基づいて強度変調されたものとなる。
【0032】
図2Aに示す第1偏向電磁石106および第2偏向電磁石107は、それぞれ平行平面の電磁石であって、第1偏向電磁石106は、高エネルギー電子ビームの進行方向をX線ターゲット管アレイ105の中の目標とするターゲット管の方向に曲げるように作用する。第2偏向電磁石107は、第1偏向電磁石で進行方向を曲げられた高エネルギー電子ビームを、目標とするX線ターゲット管の中心軸と平行になるように偏向する。
図2Cに偏向の状態を略図示してある。
【0033】
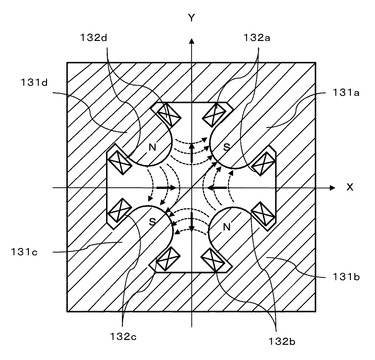
(X線源の第2の実施例)図2Dの(a)は本発明によるX線治療装置で用いる他のX線源の実施例を示すブロック図、図2Dの(b)は(a)のX線ターゲット管アレイのA−A視図であり、図2Eは4極電磁石の実施例を示す断面図である。
前述の第1の実施例と共通部分については、同じ番号で示す。この第2の実施例の特徴は、X線ターゲット管アレイ205が図2Dの(b)に示すようにX線ターゲット管104をマトリックス状に配列して構成され、このX線ターゲット管アレイ205に高エネルギー電子ビームをスキャンしながら照射すること、さらに、X線ターゲット管アレイ205の入口開口部面の形状を放射状にすることによって、4極電磁石206によって偏向された高エネルギー電子ビームがX線ターゲット管アレイ205の各X線ターゲット管104(i,j)の中心軸に対して並行に入射できるようにしたことである。この構成によって、例えば、出口開口部から50cm離れた位置でX線ターゲット管アレイ205の照射野を50mm×50mmのように放射状に形成することができる。この実施例に係るX線発生装置を実現するために、第1の実施例に係るX線発生装置において、高エネルギー電子ビームの進行方向を1次元的に偏向する第1偏向電磁石106と第2偏向電磁石107に替えて、2次元的な偏向が可能な4極電磁石206を配置する。
【0034】
図2Eは、高エネルギー電子ビームを2次元方向に偏向する4極電磁石を電子ビームの進行方向(Z軸方向)に垂直な面(X−Y軸面)で切断した断面図である。図2Eにおいて、4個の磁心131a〜131dとそれぞれの磁心に巻かれた励磁コイル132a〜132dで構成され、コイルに励磁電流を流すことで図中の点線矢印で示した方向に磁場が発生する。磁界の方向は、励磁電流の極性を反転することで、逆方向に設定することができる。
【0035】
図2Eにおいて、高エネルギー電子ビームがZ軸方向(紙面の表から裏へ)に入射してきた場合、ローレンツ力は実線矢印の方向に働く。したがって、励磁電流の大きさと極性を制御することによって、X−Y軸面の任意の方向に電子の進路を偏向することができる。
【0036】
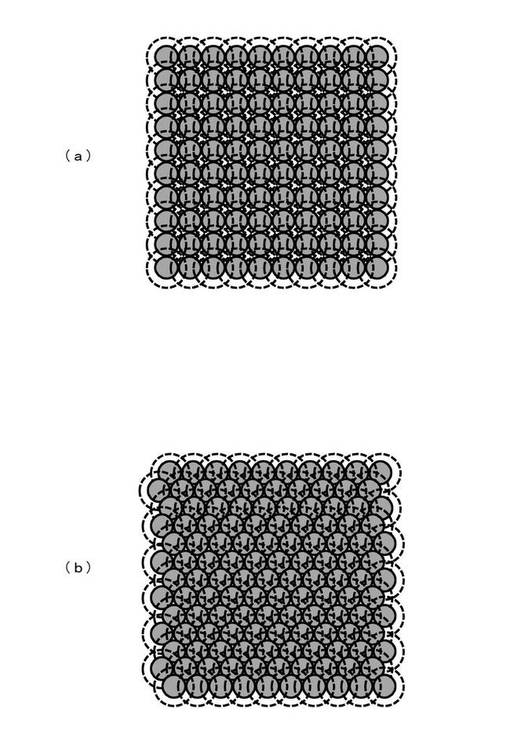
4極電磁石の磁界を通過した電子は、直進してX線ターゲット管アレイ205の入口開口部面に到達する。X線ターゲット管104(i,j)は図2Dの(b)に示すように、マトリックス状に配列されており、さらにその入口開口面は、偏向された後、直進してきた電子が、X線ターゲット管104(i,j)の中心軸に対して水平に入射するように放射状に配置されている。したがって、X線ターゲット管アレイ205から放射されるX線は放射状に照射され、図2Fに示すように面状の照射野を形成する。
【0037】
X線ターゲット管アレイ205の照射野を構成する各X線ターゲット管104(i,j)の照射野は、第1の実施例の場合と同様に1/2値幅が隣接するように形成される。第2の実施例においては、X線ターゲット管104(i,j)の照射はマトリックス状に隣接するので、その隣接の仕方として、図2Fの(a)に示すように照射野の1/2値幅が4か所で接する場合と図2Fの(b)に示すように6か所で接する場合などが考えられる。
【0038】
例えば、X線ターゲット管アレイ205の出口開口部から50cmの位置に50mm×50mmの照射野を形成する場合は、X線ターゲット管104の1/2値幅の直径を1mmとし、隣接するX線ターゲット管と4か所で接するような配置とする場合、X線ターゲット管アレイ205は、250本のX線ターゲット管で構成される。各X線ターゲット管104(i,j)の照射強度は、第1の実施例と同様に、予め設定された照射野の照射強度データ112に基づく。なお、本発明によればX線ターゲット管アレイ205を、従来の装置よりも、より患部に近接させることができるから、X線ターゲット管104の1/2値幅を10mm程度にしても良い。
【0039】
照射する場合のスキャンの方向としては、照射野の中心部から外側方向へ向かってスキャンする形態と照射野の外周から始めて、中心部へ向かってスキャンする形態及び一方の隅から他方の隅へ向かって行または列方向にスキャンする形態など、その使用状況に応じて選択することができる。
【0040】
以上説明したように、第2の実施例によれば、X線ターゲット管アレイを放射状に配列するので、その照射野を面状に広く形成することができる。従って、X線発生装置または患者を載せた治療台を移動させることなく、第1の実施例に係るX線源を用いたX線治療装置よりもさらに治療時間を短縮することができ、MMRTに好適なX線治療装置を提供することができる。
【0041】
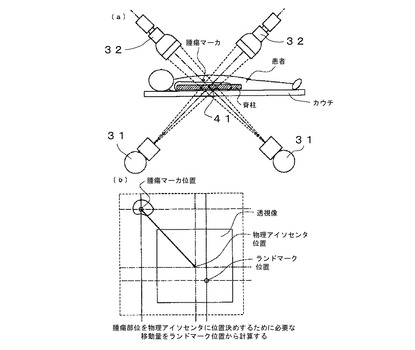
(動体追跡技術)体内に埋め込まれたマーカ等が呼吸その他の理由により移動する状態をリアルタイムで追跡する動体追跡技術は、特許第3053389号(北大方式)等に示されているように周知の技術である。本願発明ではこの周知技術に改良を施してカウチ2に対するマーカmの検出に利用する。
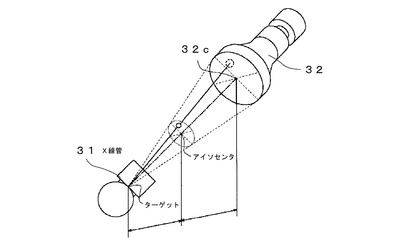
北大方式は図3Aに示すような、X線管31とイメージインテンシファイア32の対を図3Bの(a)に示すように2組使用する。これにより、基準の空間に対する腫瘍マーカと物理アイソセンタ41(腫瘍の中心)を、図3Bの(b)に示すように獲得する。
北大方式はこのようにマーカの追跡を行って、マーカの3次元座標(演算をして算出)があらかじめ与えられた範囲内にある時に照射する。
【0042】
北大方式以外の従来の動体追跡技術は、アイソセンタを基準点(腫瘍治療の基準点)として、動体(マーカと腫瘍)がアイソセンタからどれだけ移動したかを計測し、このデータを基に動体の移動を予測してX線を照射している。
【0043】
これに対して、本発明のX線治療装置の実施形態では、前述のように、カウチに設置されたマーカセンサで検出されたマーカの位置情報から腫瘍の位置に対してX線を照射し、同時にこの照射ビームの位置や方向に関する情報を検出して、次のマーカ位置情報と合わせて最適な照射条件を算出して照射する。即ち、本発明は、マーカmの動きを追尾しながら前述のように連続的に治療用X線を照射する。
これにより照射精度と照射スピードも向上させている。これによって、治療時間を短縮することができ、患者の負担を軽減することができる。ハードウエアとしてはセンサとして、イメージインテンシファイア32の代わりに固体撮像素子を用いるようにして、カウチと一体の移動を実現している。
【0044】
さらに他の動体追跡技術として、電波を利用することができる。
電波発信機として、ICタグを利用することができ、ICタグを患部近傍に複数個埋め込み、ICタグリーダに測位システムを組み込んだ受信機によって患部の位置を正確に認識することが可能となる。
【0045】
(変形例)
以上詳しく説明した実施形態、治療例につき、本発明の範囲内で種々の変形を施すことができる。
6軸または7軸ロボットアームの例を示したが、他の形式のロボットを利用することもできる。
ガントリまたは、環状回転構造も広い意味でロボットの一種と考えることができ、線源操作手段は最も広く解釈されるべきである。
治療用のX線発生装置でX線管を整列させて用いる例を示したが、他の形状の配列、たとえば渦巻き状等の配列も考えられる。
マーカとして人体に無害な重金属を用いる例およびICタグのような無線通信で情報をやりとりする例を示したが、他のアクティブな信号源の利用も考えられる。
治療用およびマーカ検出用にX線源を利用する例を示したが、他の線源を利用することもできる。
【産業上の利用可能性】
【0046】
病院等の医療施設で腫瘍等の治療に用いられる医療機械である。
【符号の説明】
【0047】
1 治療用X線発生装置
2 カウチ
3 マーカ検出用X線発生装置
4 マーカ検出用センサ
5 ロボット(線源)
6 ロボット(カウチ)
7 記憶装置
8 CPU
9 表示装置
10 治療用X線センサ
31 X線管
32 イメージインテンシファイア
32c イメージインテンシファイア中心
101 X線発生装置
102 真空容器
103 電子銃
104 X線ターゲット管
105,205 X線ターゲット管アレイ
106 第1偏向電磁石
107 第2偏向電磁石
108 電力源
109 コントローラ
110 マイクロ波源
206 4極電磁石
【技術分野】
【0001】
本発明は、X線治療を行うにあたり、患者の呼吸等により患部が移動して患部以外にX線が及ぶことによる正常組織の損壊を防止することができるX線治療装置に関する。
さらに詳しく言えば、本発明は、MMRT(Microbeam Modulated Radiation Therapy)という新しい技術により微細なX線ビームの発生を可能にして、迅速で精密なX線治療を可能にするX線治療装置に関する。
【背景技術】
【0002】
X線治療装置を用いてX線治療を行う際に、患者の呼吸等により患部が移動することで患部以外にX線が及ぶことによる正常組織の損壊が問題になり、これらに関連して種々の提案が行われている。
特許文献1記載の放射線治療装置は、治療用X線を照射する放射線発生装置と、検査用X線を出射する2つの放射線源と、2つの検出器と、画像形成装置と、解析装置とを備えている。検査対象部の3次元画像から追尾対象部位の3次元位置および3次元形状を求め、これに合わせて出射口可変式コリメータの出射口の形状を制御装置によって変化させて、治療対象部位に応じて治療用放射線の照射野を追尾させるように構成されている。
この装置は出射口可変式コリメータの出射口の形状を変化させることによって、治療対象部位の移動に追従させるため、コリメータの形状設定が完了するまで放射線の照射は行えない。照射野に対する形状的精度は、コリメータの形状設定精度に依存し、高速性と高分解能は相反して同時にこれらを満足させられないという問題がある。
【0003】
特許文献2記載の発明は、患者の呼吸を照射のタイミングと同期がとりやすいように誘導し、効率よく放射線の照射を行うことができる放射線発生装置を用いて、患者の呼吸を治療装置や診断装置の運転に適した状態に誘導し、診断および治療を効率的に行うことができる放射線治療装置および放射線診断装置を提案している。しかし患者の動きにリアルタイムに追従した治療はできないという問題がある。
【0004】
特許文献3記載の放射線治療装置は、腫瘍近傍に少なくとも3個の腫瘍マーカを埋め込み、これらの腫瘍マーカを2方向からX線透視装置で撮像し、この撮像された透視像をデジタイズし、予め登録された腫瘍マーカのテンプレート画像との間で濃淡正規化相互相関法によるテンプレートマッチングを所定フレームの実時間レベルで実行し、デジタイズされた透視象上でもっとも相関度の高い3個の腫瘍マーカの2次元座標を求めている。そして、この2次元座標に基づき少なくとも3個の腫瘍マーカの3次元座標、アイソセンタ位置等を計算して、当初計画されたアイソセンタ位置等とのずれを補正し、体幹内部の腫瘍に選択的に大線量の照射を行い、健全細胞の被爆の低減を可能にしている。
しかしながら、連続照射の速度は、腫瘍マーカの位置認識とコリメータの設定時間で制約を受けるので、一層の高速化は難しい。また、腫瘍の縁端部に対する照射の場合、コリメータを使用しているため、微小な照射は難しく、健全細胞へのダメージは残る。
【0005】
特許文献4記載の動体追跡照射装置は、腫瘍近傍に埋め込まれた腫瘍マーカを第1の方向から撮像する第1のX線透視装置と、腫瘍マーカを第2の方向から第1のX線透視装置と同時に撮像する第2のX線透過装置と、画像入力部A,Bによってデジタイズされた画像情報に予め登録された腫瘍マーカのテンプレート画像を作用させた濃淡正規化相互相関法によるテンプレートマッチングを所定フレームレートの実時間レベルで実行し、前記腫瘍マーカの2次元座標を求める認識処理部A,Bと認識処理部で算出された2次元座標より腫瘍マーカの3次元座標を計算するCPUと腫瘍マーカの3次元座標によりライナックの治療ビーム照射を制御する照射制御部とを備えている。そして体幹部内の動き回る腫瘍に対しても選択的に大線量の照射を行い、健全細胞への被爆の低減を図っている。
しかしながら、特許文献3で検討したように連続照射の速度は、腫瘍マーカの位置認識とコリメータの設定時間で制約を受けるので、一層の高速化は難しい。また、腫瘍の縁端部に対する照射の場合、コリメータを使用しているため、微小な照射は難しく、健全細胞へのダメージは残る。
【0006】
特許文献5記載の治療中の患者の呼吸および他の移動を補償する装置は、内部標的領域に関する位置データを周期的に発生する第1検出装置と、1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、治療が外部センサから得た位置データに基づいて患者の標的領域の位置に向けてなされるように内部標的領域の位置と外部センサの位置との対応関係を創成すべく、内部標的領域および外部センサに関する位置データを受けるプロセッサとを有することを特徴としている。
しかしながら、連続照射の速度は、腫瘍マーカの位置認識とコリメータの設定時間で制約を受けるので、一層の高速化は難しい。
また、腫瘍の縁端部に対する照射の場合、コリメータを使用しているため、微小な照射は難しく、健全細胞へのダメージは残るという問題がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3790481号公報
【特許文献2】特許第3881199号公報
【特許文献3】特許第3748531号公報
【特許文献4】特許第3053389号公報
【特許文献5】特表2003−523220号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述した各装置は、解決されるべき次の課題を含んでいる。
・連続照射ができないため、治療に時間がかかり、患者の精神的・肉体的負担が大きくなる。
・X線治療の結果に対する検証(Verification)の精度が低い上に操作が煩雑であった。
・X線ビームの直径を小さくすることができないから患部周辺の健全細胞を損傷することなく、腫瘍等を完全に除去することは困難である。
・ガントリを用いるものが殆どでX線の照射方向に制限があり、任意の方向から最適な角度での照射が制限されている。
本発明の目的は、患者の治療対象部位の動きにリアルタイムに追従することができ、しかも高出力で細いX線(Microbeam)を用い、患部の健全な細胞へ悪影響を及ぼすことなく、患部の外形(治療対象腫瘍の形状)に沿って高速、高精度にX線治療を行うことができるX線治療装置を提供することにある。
【課題を解決するための手段】
【0009】
前記目的を達成するために本発明による請求項1記載のX線治療装置は、
カウチに仰臥した患者に、異なる位置からのX線ビームを患部で交差または患部に通過させて一回以上のX線照射治療をするX線治療装置であって、
患部に対して既知の位置関係を保って患者に固定されるマーカのカウチに対する位置を検出し患部位置データを得るマーカセンサと、
カウチの位置・姿勢を変更させるカウチ操作手段と、
X線治療ビームの形状、線量を制御可能な治療用X線源と、
前記治療用X線源より照射され、患部を透過したX線を検出する治療用X線センサと、
前記治療用X線源を支持して患部に向けて、前記治療用X線源の位置・姿勢を制御する線源操作手段と、
治療計画データに基づいて、前記マーカセンサの出力により特定された患部におけるX線治療ビームの形状、線量を演算して前記治療用X線源と前記各操作手段に制御信号を発生する中央処理装置と、から構成されている。
マーカは患部に対して既知の位置関係を保って患者に固定されるから、マーカを検出することによりカウチに対する患部の位置が明らかになり、治療用X線源を患部に向けて、適切な照射による治療が可能となる。
【0010】
本発明による請求項2記載のX線治療装置は、請求項1記載のX線治療装置において、
前記線源操作手段は、6軸または7軸ロボットアームのヘッドに前記治療用X線源を支持するものであることを特徴とする。
これにより、患部に向かう広い立体角内からのX線の治療が可能となる。
また、本発明による請求項3記載のX線治療装置は、請求項1記載のX線治療装置において、
前記線源操作手段は、前記治療用X線源を支持して前記カウチの移動と共同して自由にX線治療ビームの方向を決定するガントリであるかまたは環状回転構造であることを特徴とする。
【0011】
本発明による請求項4記載のX線治療装置は、請求項1記載のX線治療装置において、
前記治療用X線源は、1MV以上の高エネルギーX線を発生し、ビーム径が1mm〜10mm程度の細いX線ビームを出力するX線管を複数本束ねたX線管アレイにより構成されている。
これにより精密な治療ができる。
また、本発明による請求項5記載のX線治療装置は、請求項4記載のX線治療装置において、
前記治療用X線源のX線管の動作選択は治療計画データにしたがって行われることを特徴とするものである。
このような請求項4,5記載の構成によれば、従来マルチコリメータにより形成されていた治療用のX線ビームの(断面)形状の変更をX線管の各束の要素(1mm〜10mm程度の細いX線ビーム)の動作選択による組み合わせにより無限の形状にかつリアルタイムで変更することができ、複雑な患部の治療が可能になる。
このX線ビームの(断面)形状の設定や変更は、後述するように一連のX線照射治療中にリアルタイムで行われ、治療の質の向上と、治療時間の短縮に寄与している。
【0012】
本発明による請求項6記載のX線治療装置は、請求項1記載のX線治療装置において、
前記マーカセンサの検出対象であるマーカは人体に無害な重金属であり、前記マーカセンサはカウチに固定された患部に向けられる二つの低エネルギーX線発生装置とそれぞれに対応する画像センサであり、患部とマーカの像を出力することを特徴とするものである。
このX線治療装置によって、カウチとの関係で患部の位置が特定できる。
また、本発明による請求項7記載のX線治療装置は、請求項1記載のX線治療装置において、
前記二つの低エネルギーX線発生装置とそれぞれに対応する画像センサはガントリに設けられていることを特徴とするものである。
【0013】
本発明による請求項8記載のX線治療装置は、請求項1記載のX線治療装置において、
前記マーカセンサの検出対象は、患部と一定の位置関係をもち患部と同一の動きを示す電波発信機であり、前記マーカセンサは受信機であることを特徴とするものである。
【0014】
本発明による請求項9記載のX線治療装置は、請求項1記載のX線治療装置において、
X線照射治療は治療計画データに基づいて、複数回の一連の照射が行われるものであり、
低エネルギーX線を照射してマーカの位置を検出し予め治療計画で取得したマーカ及び患部の画像データと比較照合して確認し、
治療用高エネルギーX線を照射して、その透過X線を前記治療用X線センサで検出して確認し、必要に応じて治療計画データを修正して次期の照射を行うことを特徴とするものである。
この治療用X線センサは、治療後のX線治療検証(Verification)にも用いられる。
また、本発明による請求項10記載のX線治療装置は、請求項9記載のX線治療装置において、
前記X線治療装置は、X線治療ビームの形状、線量を前回までの治療用X線センサの画像データまたはマーカ及び患部の画像データのいずれかまたはそれらの組み合わせに基づいて修正することを特徴とするものである。
これにより、X線治療の要素を変更しながら一連の治療が実現でき、患者の負担を少なくした精密な治療が可能になる。
さらに、本発明による請求項11記載のX線治療装置は、請求項1記載のX線治療装置において、
高エネルギーX線を検出する治療用X線センサは、前記カウチに取り付けられていることを特徴とするものである。
【発明の効果】
【0015】
前記構成によれば、患者の治療対象部位の動きにリアルタイムに追従することができ、しかも高出力で細いX線(Microbeam)を用い、患部の健全な細胞へ悪影響を及ぼすことなく、患部の外形(治療対象腫瘍の形状)に沿って高速、高精度にX線治療(Microbeam Modulated Radiation Therapy)を行うことができるX線治療装置を提供できる。
【図面の簡単な説明】
【0016】
【図1A】本発明によるX線治療装置の実施形態を示す斜視図である。
【図1B】本発明によるX線治療装置の実施形態を示すブロック図である。
【図2A】本発明によるX線治療装置で用いるX線源の実施例を示すブロック図である。
【図2B】本発明によるX線治療装置で用いる前記X線源の動作を示す説明図である。
【図2C】前記X線源の電子ビームの偏向を説明するための説明図である。
【図2D】本発明によるX線治療装置で用いる他のX線源の実施例を示すブロック図(a)および、(a)のX線ターゲット管アレイのA−A視図(b)である。
【図2E】前記他のX線源の偏向電磁石の断面図である。
【図2F】前記他のX線源のX線ターゲットの照射野について説明する図である。
【図3A】動体追跡技術で用いられる線源とセンサ一組を取り出して示した斜視図である。
【図3B】動体追跡技術の動作を説明するための略図である。
【図4】本発明によるX線治療装置の線源の照射動作を説明するための波形図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の実施の形態を詳しく説明する。
図1Aは、本発明によるX線治療装置の実施形態を示す斜視図であり、図1Bは前記装置のブロック図である。以下の実施の形態は、患部が腫瘍である場合について記述されている。
前記装置において基準点(物理学的な体)に対して患部と治療用X線源の放射方向と位置は調整され、異なる位置からのX線ビームが患部で交差または近接通過することにより、X線ビームのエネルギー密度の上昇により患部(腫瘍)の組織が破壊(治療)される。マーカmは患部に対して既知の位置関係を保って患者に固定される。
マーカセンサの検出対象であるマーカmは、人体に安全でX線の吸収が大きいAu、Ptなどの重金属である。
マーカセンサはカウチ2に固定されて患部に向けられる2つの低エネルギーX線発生装置(マーカ検出用低エネルギーX線発生装置3(L,R))とそれぞれに対応する画像センサ(マーカ検出用センサ4(L,R))を含んでいる。この2組のマーカセンサにより、マーカmのカウチ2に対する空間的位置とマーカmと既知な関係にある腫瘍の情報が得られる。この腫瘍の位置の特定については項を分けて(動体追跡技術)として後述する。
【0018】
カウチ2の位置はカウチ位置姿勢制御手段により変更させられる。
カウチ位置姿勢制御手段はカウチ2を支持して、カウチ2を基準平面(例えば本装置が設置された空間の水平面)に対して上下、この上下軸回りの回転、前記水平面に平行な軸回りの回転、前記軸方向に進退させることができる(図1A参照)。
カウチ2に対するマーカmの位置を検出するマーカセンサは当然カウチ2と一体に移動させられることにより、マーカmのカウチ2に対する3次元位置を特定する。
【0019】
治療用X線源(治療用X線発生装置1)は治療ビームの形状、強度が制御可能である。この装置の詳細な構成は項を分けて(X線源の第1の実施例,第2の実施例)として後述する。
操作ロボット5は治療用X線発生装置1を支持して、患部に向けて治療用X線発生装置1の位置、方向を制御する。操作ロボット5は6軸または7軸ロボットアームにより、治療用X線発生装置1を支持している。
操作ロボット5とは別の、カウチ2を操作するためのロボット6が設けられている。
このロボット6は操作ロボット5に対して床面における相対位置を調節(例えば6aの方向の移動)ができるように設けられており、その位置において垂直軸方向の上下移動、同軸回りの回転、カウチ2の中心軸回りの回転を可能にしている。
【0020】
図1Bは、前述した実施形態をブロック図に示したものである。
治療用X線発生装置1は、ロボット5に支持されており、カウチ2側にフラットパネルを検出器として用いた治療用X線センサ10が設けられている。
治療用X線センサ10は、治療用X線の位置、強度、方向などの治療中の患部の照射状態を検出するためのセンサであり、治療用X線発生装置1が動作中に患部を透過して到達する透過X線を検出するためにカウチ2に関連して設けられ、ロボット6によりカウチ2とともに移動させられるか、または治療用X線発生装置1の移動に追従して移動するように更に他のロボット(図示せず)によりカウチ2の下側の空間でカウチ2に対しても移動できるように設けられている。また治療用X線発生装置1の出力を低下させてX線治療後の患部の状態を知るためのセンサとして使用することも可能である。
マーカセンサの一対のマーカ検出用X線発生装置3(L,R)の出力はマーカ検出用センサ4(L,R)に取り込まれインターフェース8bを介してCPU8に取り込まれ、表示装置9(マーカ検出用センサ4Lの出力は9−4L、4Rの出力は9−4Rに、治療用X線センサ10の出力は9−10)で表示されるとともに記憶装置7に蓄積される。
なお、8aはキーボード等の入力装置である。
【0021】
この実施形態では事前に、またはマーカセンサ3,4により得られたデータにより策定された治療計画データに基づいて、中央処理装置(CPU)8は、マーカセンサの出力により特定された患部に対して必要なビームの強さと方向と時間を演算し、ロボット5の動作を指示または動作終了後に治療用X線発生装置1用のX線源を作動させる。
なお医者の位置には表示装置9が設けられ、治療の状態を観測できるようにしてある。
【0022】
腫瘍の近傍に埋め込まれた金属マーカmにマーカ検出用X線を照射して、腫瘍の動きを捉える。マーカ検出用X線発生装置3と照射されたX線を検出するマーカ検出用センサ4はカウチ2に2組設置される。マーカ検出用X線のエネルギーは、X線の照射をパルス状に10万発以上照射しても細胞に悪影響を与えないように、低いエネルギーレベルに設定する。照射されたマーカ検出用X線は、直交する2方向から照射されて患者を透過して、埋め込まれたマーカmの画像をカウチ2に設置されたフラットパネルなどのマーカ検出用センサ4に結ぶ。
カウチ2に関連して、前述した治療用X線センサ10も設置されていて、X線ビームの強度や照射位置と方向を検出する。このデータは、次の治療用X線照射の制御に使用されるが、その他に、治療後に治療計画通りの照射が実施されたか検証(Verification)するときの重要なデータとなる。これによって、治療後の検証が容易になり、医師の負担を軽減できる。
【0023】
(X線照射治療単位の説明)
治療用X線と腫瘍マーカ検出用X線の照射タイミングは、以下に説明する図の通りである。
図4の(A)は、治療用X線の照射タイミング図、図4の(B)はマーカ検出用X線の照射タイミング図である。
治療用X線(治療用X線発生装置1による)照射の間隙にマーカセンサのマーカ検出用X線発生装置3からのX線を照射してマーカの位置検出を行い、この検出結果に基づいて治療用X線を照射する。治療用X線照射は、200パルス/秒を10分間程度継続する。1パルスのマイクロビームX線のエネルギーは、健全な細胞にダメージを与えるレベルではない。
治療対象の腫瘍には、後述するように治療計画で定めた特定の方向(略全方位中から選択される)から約12万パルスのマイクロビームX線が集中するので、癌細胞を破壊するのに十分な線量分布を得ることができる。
【0024】
(治療計画に基づく治療)
本願発明のX線治療装置による治療は、本願発明装置のセンサによって得たデータ、他の検査装置等で得たデータを医師が総合判断して、策定された基本治療計画に基づいてなされる。基本治療計画は一連の照射における、X線ビームの方向、X線ビームの形状、X線ビームの強度を含んでいる。
(1)マーカ検出用X線発生装置3を起動して、低エネルギーX線を患部とマーカを含む領域に照射してマーカの位置を検出し、予め策定された基本治療計画で取得したマーカ及び患部の画像データと比較照合して確認する。
(2)治療用X線発生装置1を起動して、基本治療計画の定めるビーム形状、強度を備える治療用高エネルギーX線を患部に向けて照射する。
(3)前記照射は同時に治療用X線センサ10で検出され確認される。
(4)前記(3)の結果に基づき次の照射の要素(強度の増減、ビーム形状の変更)の一部を変更して、次の(1)→(2)を続行する。
【0025】
以上により、本発明によるX線治療装置は、X線治療ビームの形状、線量を前回までの治療用X線センサまたはマーカ及び患部の画像データのいずれかまたはそれらの組み合わせに基づいてリアルタイムで修正し、最適な治療を実施できる。
【0026】
本発明による装置で使用する特に治療用の線源はMMRT(Microbeam Modulated Radiation Therapy)という新しい技術に適合するように、本件発明者が開発したものであって平成19年12月13日に発明の名称「X線発生装置」(特願2007−322483)としてすでに出願されている。
以下このX線源を本発明による治療装置との関連で説明する。
【0027】
(X線源の第1の実施例)図2Aは、本発明によるX線治療装置で用いるX線源の実施例を示すブロック図、図2Bは、前記X線源の動作を示す説明図であり、図2Cは、前記X線源の電子ビームの偏向を説明するための説明図である。
図2Aに示すように、X線発生装置101は、真空容器102の中に、高エネルギー電子ビームを照射する電子源(以下、電子銃という。)103と、電子銃103が照射した高エネルギー電子ビームを衝突させてX線ビームを放射する複数のX線ターゲット管104−1〜104−nを単列に並べて構成したX線ターゲット管アレイ105と、電子銃103が照射した高エネルギー電子ビームの進行方向を偏向する第1偏向電磁石106および第2偏向電磁石107とを備える。
【0028】
真空容器102の外部に、電子銃103に高エネルギーパルスを所定のタイミングで出力する電力源108と、電子銃103に高電圧のマイクロ波を供給するマイクロ波源110と、電力源108、マイクロ波源110、第1偏向電磁石106および第2偏向電磁石107を制御するコントローラ109とを備える。
【0029】
コントローラ109には、照射制御プログラム111、X線ターゲット管アレイ105の照射野の照射強度データ112から構成される治療野の照射強度データ113が格納される。照射野の照射強度データ112は、X線ターゲット管アレイ105を構成するX線ターゲット管104−1〜104−n毎に照射線量を定めたものである。
【0030】
照射制御プログラム111は、電子銃103から照射された高エネルギー電子ビームが単列に並んだX線ターゲット管104−1〜104−nに順番に入射するように高電圧マイクロ波源110の制御、第1偏向電磁石106および第2偏向電磁石107の励磁動作を制御し、さらに電力源108から出力される高エネルギーパルスの幅を制御する。
【0031】
図2Bはこの実施例の照射野の照射強度データに対応してX線ターゲット管アレイの照射野が強度変調される様子を示している。図2Bに示すように、電力源108から所望の照射線量に対応する高エネルギーパルスp−1〜p−nが出力されると、電子銃103より順次、高エネルギーパルスp−1〜p−nに対応した電子ビームが照射され、X線ターゲット管アレイ105を構成するX線ターゲット管104−1〜104−nの内壁に衝突して、X線ビームx−1〜x−nを放射する。X線ビームx−1〜x−nは、照射野の照射強度データ112に基づいて強度変調されたものとなる。
【0032】
図2Aに示す第1偏向電磁石106および第2偏向電磁石107は、それぞれ平行平面の電磁石であって、第1偏向電磁石106は、高エネルギー電子ビームの進行方向をX線ターゲット管アレイ105の中の目標とするターゲット管の方向に曲げるように作用する。第2偏向電磁石107は、第1偏向電磁石で進行方向を曲げられた高エネルギー電子ビームを、目標とするX線ターゲット管の中心軸と平行になるように偏向する。
図2Cに偏向の状態を略図示してある。
【0033】
(X線源の第2の実施例)図2Dの(a)は本発明によるX線治療装置で用いる他のX線源の実施例を示すブロック図、図2Dの(b)は(a)のX線ターゲット管アレイのA−A視図であり、図2Eは4極電磁石の実施例を示す断面図である。
前述の第1の実施例と共通部分については、同じ番号で示す。この第2の実施例の特徴は、X線ターゲット管アレイ205が図2Dの(b)に示すようにX線ターゲット管104をマトリックス状に配列して構成され、このX線ターゲット管アレイ205に高エネルギー電子ビームをスキャンしながら照射すること、さらに、X線ターゲット管アレイ205の入口開口部面の形状を放射状にすることによって、4極電磁石206によって偏向された高エネルギー電子ビームがX線ターゲット管アレイ205の各X線ターゲット管104(i,j)の中心軸に対して並行に入射できるようにしたことである。この構成によって、例えば、出口開口部から50cm離れた位置でX線ターゲット管アレイ205の照射野を50mm×50mmのように放射状に形成することができる。この実施例に係るX線発生装置を実現するために、第1の実施例に係るX線発生装置において、高エネルギー電子ビームの進行方向を1次元的に偏向する第1偏向電磁石106と第2偏向電磁石107に替えて、2次元的な偏向が可能な4極電磁石206を配置する。
【0034】
図2Eは、高エネルギー電子ビームを2次元方向に偏向する4極電磁石を電子ビームの進行方向(Z軸方向)に垂直な面(X−Y軸面)で切断した断面図である。図2Eにおいて、4個の磁心131a〜131dとそれぞれの磁心に巻かれた励磁コイル132a〜132dで構成され、コイルに励磁電流を流すことで図中の点線矢印で示した方向に磁場が発生する。磁界の方向は、励磁電流の極性を反転することで、逆方向に設定することができる。
【0035】
図2Eにおいて、高エネルギー電子ビームがZ軸方向(紙面の表から裏へ)に入射してきた場合、ローレンツ力は実線矢印の方向に働く。したがって、励磁電流の大きさと極性を制御することによって、X−Y軸面の任意の方向に電子の進路を偏向することができる。
【0036】
4極電磁石の磁界を通過した電子は、直進してX線ターゲット管アレイ205の入口開口部面に到達する。X線ターゲット管104(i,j)は図2Dの(b)に示すように、マトリックス状に配列されており、さらにその入口開口面は、偏向された後、直進してきた電子が、X線ターゲット管104(i,j)の中心軸に対して水平に入射するように放射状に配置されている。したがって、X線ターゲット管アレイ205から放射されるX線は放射状に照射され、図2Fに示すように面状の照射野を形成する。
【0037】
X線ターゲット管アレイ205の照射野を構成する各X線ターゲット管104(i,j)の照射野は、第1の実施例の場合と同様に1/2値幅が隣接するように形成される。第2の実施例においては、X線ターゲット管104(i,j)の照射はマトリックス状に隣接するので、その隣接の仕方として、図2Fの(a)に示すように照射野の1/2値幅が4か所で接する場合と図2Fの(b)に示すように6か所で接する場合などが考えられる。
【0038】
例えば、X線ターゲット管アレイ205の出口開口部から50cmの位置に50mm×50mmの照射野を形成する場合は、X線ターゲット管104の1/2値幅の直径を1mmとし、隣接するX線ターゲット管と4か所で接するような配置とする場合、X線ターゲット管アレイ205は、250本のX線ターゲット管で構成される。各X線ターゲット管104(i,j)の照射強度は、第1の実施例と同様に、予め設定された照射野の照射強度データ112に基づく。なお、本発明によればX線ターゲット管アレイ205を、従来の装置よりも、より患部に近接させることができるから、X線ターゲット管104の1/2値幅を10mm程度にしても良い。
【0039】
照射する場合のスキャンの方向としては、照射野の中心部から外側方向へ向かってスキャンする形態と照射野の外周から始めて、中心部へ向かってスキャンする形態及び一方の隅から他方の隅へ向かって行または列方向にスキャンする形態など、その使用状況に応じて選択することができる。
【0040】
以上説明したように、第2の実施例によれば、X線ターゲット管アレイを放射状に配列するので、その照射野を面状に広く形成することができる。従って、X線発生装置または患者を載せた治療台を移動させることなく、第1の実施例に係るX線源を用いたX線治療装置よりもさらに治療時間を短縮することができ、MMRTに好適なX線治療装置を提供することができる。
【0041】
(動体追跡技術)体内に埋め込まれたマーカ等が呼吸その他の理由により移動する状態をリアルタイムで追跡する動体追跡技術は、特許第3053389号(北大方式)等に示されているように周知の技術である。本願発明ではこの周知技術に改良を施してカウチ2に対するマーカmの検出に利用する。
北大方式は図3Aに示すような、X線管31とイメージインテンシファイア32の対を図3Bの(a)に示すように2組使用する。これにより、基準の空間に対する腫瘍マーカと物理アイソセンタ41(腫瘍の中心)を、図3Bの(b)に示すように獲得する。
北大方式はこのようにマーカの追跡を行って、マーカの3次元座標(演算をして算出)があらかじめ与えられた範囲内にある時に照射する。
【0042】
北大方式以外の従来の動体追跡技術は、アイソセンタを基準点(腫瘍治療の基準点)として、動体(マーカと腫瘍)がアイソセンタからどれだけ移動したかを計測し、このデータを基に動体の移動を予測してX線を照射している。
【0043】
これに対して、本発明のX線治療装置の実施形態では、前述のように、カウチに設置されたマーカセンサで検出されたマーカの位置情報から腫瘍の位置に対してX線を照射し、同時にこの照射ビームの位置や方向に関する情報を検出して、次のマーカ位置情報と合わせて最適な照射条件を算出して照射する。即ち、本発明は、マーカmの動きを追尾しながら前述のように連続的に治療用X線を照射する。
これにより照射精度と照射スピードも向上させている。これによって、治療時間を短縮することができ、患者の負担を軽減することができる。ハードウエアとしてはセンサとして、イメージインテンシファイア32の代わりに固体撮像素子を用いるようにして、カウチと一体の移動を実現している。
【0044】
さらに他の動体追跡技術として、電波を利用することができる。
電波発信機として、ICタグを利用することができ、ICタグを患部近傍に複数個埋め込み、ICタグリーダに測位システムを組み込んだ受信機によって患部の位置を正確に認識することが可能となる。
【0045】
(変形例)
以上詳しく説明した実施形態、治療例につき、本発明の範囲内で種々の変形を施すことができる。
6軸または7軸ロボットアームの例を示したが、他の形式のロボットを利用することもできる。
ガントリまたは、環状回転構造も広い意味でロボットの一種と考えることができ、線源操作手段は最も広く解釈されるべきである。
治療用のX線発生装置でX線管を整列させて用いる例を示したが、他の形状の配列、たとえば渦巻き状等の配列も考えられる。
マーカとして人体に無害な重金属を用いる例およびICタグのような無線通信で情報をやりとりする例を示したが、他のアクティブな信号源の利用も考えられる。
治療用およびマーカ検出用にX線源を利用する例を示したが、他の線源を利用することもできる。
【産業上の利用可能性】
【0046】
病院等の医療施設で腫瘍等の治療に用いられる医療機械である。
【符号の説明】
【0047】
1 治療用X線発生装置
2 カウチ
3 マーカ検出用X線発生装置
4 マーカ検出用センサ
5 ロボット(線源)
6 ロボット(カウチ)
7 記憶装置
8 CPU
9 表示装置
10 治療用X線センサ
31 X線管
32 イメージインテンシファイア
32c イメージインテンシファイア中心
101 X線発生装置
102 真空容器
103 電子銃
104 X線ターゲット管
105,205 X線ターゲット管アレイ
106 第1偏向電磁石
107 第2偏向電磁石
108 電力源
109 コントローラ
110 マイクロ波源
206 4極電磁石
【特許請求の範囲】
【請求項1】
カウチに仰臥した患者に、異なる位置からのX線ビームを患部で交差または患部に通過させて一回以上のX線照射治療をするX線治療装置であって、
患部に対して既知の位置関係を保って患者に固定されるマーカのカウチに対する位置を検出し患部位置データを得るマーカセンサと、
カウチの位置・姿勢を変更させるカウチ操作手段と、
X線治療ビームの形状、線量を制御可能な治療用X線源と、
前記治療用X線源より照射され、患部を透過したX線を検出する治療用X線センサと、
前記治療用X線源を支持して患部に向けて、前記治療用X線源の位置・姿勢を制御する線源操作手段と、
治療計画データに基づいて、前記マーカセンサの出力により特定された患部におけるX線治療ビームの形状、線量を演算して前記治療用X線源と前記各操作手段に制御信号を発生する中央処理装置と、
から構成したX線治療装置。
【請求項2】
請求項1記載のX線治療装置において、
前記線源操作手段は、6軸または7軸ロボットアームのヘッドに前記治療用X線源を支持するものであることを特徴とするX線治療装置。
【請求項3】
請求項1記載のX線治療装置において、
前記線源操作手段は、前記治療用X線源を支持して前記カウチの移動と共同して自由にX線治療ビームの方向を決定するガントリであるかまたは環状回転構造であることを特徴とするX線治療装置。
【請求項4】
請求項1記載のX線治療装置において、
前記治療用X線源は、1MV以上の高エネルギーX線を発生し、ビーム径が1mm〜10mmの細いX線ビームを出力するX線管を複数本束ねたX線管アレイにより構成されているX線治療装置。
【請求項5】
請求項4記載のX線治療装置において、
前記治療用X線源のX線管の動作選択は治療計画データにしたがって行われることを特徴とするX線治療装置。
【請求項6】
請求項1記載のX線治療装置において、
前記マーカセンサの検出対象であるマーカは人体に無害な重金属であり、前記マーカセンサはカウチに固定された患部に向けられる二つの低エネルギーX線発生装置とそれぞれに対応する画像センサであり、患部とマーカの像を出力することを特徴とするX線治療装置。
【請求項7】
請求項1記載のX線治療装置において、
前記二つの低エネルギーX線発生装置とそれぞれに対応する画像センサはガントリに設けられていることを特徴とするX線治療装置。
【請求項8】
請求項1記載のX線治療装置において、
前記マーカセンサの検出対象は、患部と一定の位置関係をもち患部と同一の動きを示す電波発信機であり、前記マーカセンサは受信機であることを特徴とするX線治療装置。
【請求項9】
請求項1記載のX線治療装置において、
X線照射治療は治療計画データに基づいて、複数回の一連の照射が行われるものであり、
低エネルギーX線を照射してマーカの位置を検出し予め治療計画で取得したマーカ及び患部の画像データと比較照合して確認し、
治療用高エネルギーX線を照射して、その透過X線を前記治療用X線センサで検出して確認し、必要に応じて治療計画データを修正して次期の照射を行うことを特徴とするX線治療装置。
【請求項10】
請求項9記載のX線治療装置において、
前記X線治療装置は、X線治療ビームの形状、線量を前回までの治療用X線センサの画像データまたはマーカ及び患部の画像データのいずれかまたはそれらの組み合わせに基づいて修正することを特徴とするX線治療装置。
【請求項11】
請求項1記載のX線治療装置において、
高エネルギーX線を検出する治療用X線センサは、前記カウチに取り付けられていることを特徴とするX線治療装置。
【請求項1】
カウチに仰臥した患者に、異なる位置からのX線ビームを患部で交差または患部に通過させて一回以上のX線照射治療をするX線治療装置であって、
患部に対して既知の位置関係を保って患者に固定されるマーカのカウチに対する位置を検出し患部位置データを得るマーカセンサと、
カウチの位置・姿勢を変更させるカウチ操作手段と、
X線治療ビームの形状、線量を制御可能な治療用X線源と、
前記治療用X線源より照射され、患部を透過したX線を検出する治療用X線センサと、
前記治療用X線源を支持して患部に向けて、前記治療用X線源の位置・姿勢を制御する線源操作手段と、
治療計画データに基づいて、前記マーカセンサの出力により特定された患部におけるX線治療ビームの形状、線量を演算して前記治療用X線源と前記各操作手段に制御信号を発生する中央処理装置と、
から構成したX線治療装置。
【請求項2】
請求項1記載のX線治療装置において、
前記線源操作手段は、6軸または7軸ロボットアームのヘッドに前記治療用X線源を支持するものであることを特徴とするX線治療装置。
【請求項3】
請求項1記載のX線治療装置において、
前記線源操作手段は、前記治療用X線源を支持して前記カウチの移動と共同して自由にX線治療ビームの方向を決定するガントリであるかまたは環状回転構造であることを特徴とするX線治療装置。
【請求項4】
請求項1記載のX線治療装置において、
前記治療用X線源は、1MV以上の高エネルギーX線を発生し、ビーム径が1mm〜10mmの細いX線ビームを出力するX線管を複数本束ねたX線管アレイにより構成されているX線治療装置。
【請求項5】
請求項4記載のX線治療装置において、
前記治療用X線源のX線管の動作選択は治療計画データにしたがって行われることを特徴とするX線治療装置。
【請求項6】
請求項1記載のX線治療装置において、
前記マーカセンサの検出対象であるマーカは人体に無害な重金属であり、前記マーカセンサはカウチに固定された患部に向けられる二つの低エネルギーX線発生装置とそれぞれに対応する画像センサであり、患部とマーカの像を出力することを特徴とするX線治療装置。
【請求項7】
請求項1記載のX線治療装置において、
前記二つの低エネルギーX線発生装置とそれぞれに対応する画像センサはガントリに設けられていることを特徴とするX線治療装置。
【請求項8】
請求項1記載のX線治療装置において、
前記マーカセンサの検出対象は、患部と一定の位置関係をもち患部と同一の動きを示す電波発信機であり、前記マーカセンサは受信機であることを特徴とするX線治療装置。
【請求項9】
請求項1記載のX線治療装置において、
X線照射治療は治療計画データに基づいて、複数回の一連の照射が行われるものであり、
低エネルギーX線を照射してマーカの位置を検出し予め治療計画で取得したマーカ及び患部の画像データと比較照合して確認し、
治療用高エネルギーX線を照射して、その透過X線を前記治療用X線センサで検出して確認し、必要に応じて治療計画データを修正して次期の照射を行うことを特徴とするX線治療装置。
【請求項10】
請求項9記載のX線治療装置において、
前記X線治療装置は、X線治療ビームの形状、線量を前回までの治療用X線センサの画像データまたはマーカ及び患部の画像データのいずれかまたはそれらの組み合わせに基づいて修正することを特徴とするX線治療装置。
【請求項11】
請求項1記載のX線治療装置において、
高エネルギーX線を検出する治療用X線センサは、前記カウチに取り付けられていることを特徴とするX線治療装置。
【図1B】


【図2A】
【図2B】
【図2C】
【図2D】
【図2E】
【図3A】
【図3B】
【図4】

【図1A】
【図2F】
【図2A】
【図2B】
【図2C】
【図2D】
【図2E】
【図3A】
【図3B】
【図4】
【図1A】
【図2F】
【公開番号】特開2010−227142(P2010−227142A)
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願番号】特願2009−75008(P2009−75008)
【出願日】平成21年3月25日(2009.3.25)
【特許番号】特許第4418888号(P4418888)
【特許公報発行日】平成22年2月24日(2010.2.24)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成19年度〜平成21年度、独立行政法人新エネルギー・産業技術総合開発機構、「基礎研究から臨床研究への橋渡し促進技術開発/X線マイクロビーム加速器による次世代ミニマムリスク型放射線治療システムの研究開発」委託契約、産業技術力強化第19条の適用を受ける特許出願
【出願人】(506118216)株式会社アキュセラ (5)
【Fターム(参考)】
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願日】平成21年3月25日(2009.3.25)
【特許番号】特許第4418888号(P4418888)
【特許公報発行日】平成22年2月24日(2010.2.24)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成19年度〜平成21年度、独立行政法人新エネルギー・産業技術総合開発機構、「基礎研究から臨床研究への橋渡し促進技術開発/X線マイクロビーム加速器による次世代ミニマムリスク型放射線治療システムの研究開発」委託契約、産業技術力強化第19条の適用を受ける特許出願
【出願人】(506118216)株式会社アキュセラ (5)
【Fターム(参考)】
[ Back to top ]