
X線透視による3次元観測方法およびX線透視装置
【課題】X線CT装置を用いることなく、X線透視を行うことにより、アルミダイキャスト部品のボイド等の欠陥をはじめとして、透視対象物内部の特異部位の3次元位置情報を正確に知ることができ、加えて3次元の概略形状を知ることのできるX線透視を用いた3次元観測方法と、その方法を用いたX線透視装置を提供する。
【解決手段】X線源1とX線検出器2の対と透視対象物Wとの相対位置を変化させ張ることにより、透視方向を少なくとも3方向に相違させた透視対象物Wの透視像を取得し、その各透視像上で特異部位の像を抽出し、各透視方向の透視像上で抽出された特異部位の像対応付けした後、各透視方向の透視像上の特異部位の像と、これらの各透視像を得たときのX線源1とX線検出器2の透視対象物Wに対する相対的な3次元位置情報を用いて、特異部位の3次元位置および/または3次元形状を算出し、表示する。
【解決手段】X線源1とX線検出器2の対と透視対象物Wとの相対位置を変化させ張ることにより、透視方向を少なくとも3方向に相違させた透視対象物Wの透視像を取得し、その各透視像上で特異部位の像を抽出し、各透視方向の透視像上で抽出された特異部位の像対応付けした後、各透視方向の透視像上の特異部位の像と、これらの各透視像を得たときのX線源1とX線検出器2の透視対象物Wに対する相対的な3次元位置情報を用いて、特異部位の3次元位置および/または3次元形状を算出し、表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品にX線を照射し、その透過X線をX線検出器で検出することによって物品のX線透視を行う手法を用いて、物品を3次元観察する方法と、その3次元観察方法を用いたX線透視装置に関し、特に、例えばアルミダイキャスト部品の内部に存在するボイド等の欠陥検査等に適した方法並びに装置に関する。
【背景技術】
【0002】
例えばアルミダイキャスト部品のボイド等の検査や観測には、X線透視装置が多用されている。X線透視装置は、一般に、互いに対向配置されたX線源とX線検出器の間に、対象物を搭載する試料ステージが設けられた構造をもち、X線源からのX線を対象物に照射し、その透過X線をX線検出器で検出し、その出力を用いて対象物のX線透視像を表示器に表示する。
【0003】
ここで、X線透視においては、対象物の内部構造を素早く可視化することができる点において優れているが、X線透視により得られる像には、X線が透過した全ての部位の情報が重なって表示されるため、例えばアルミダイキャスト部品のボイドの検査ないしは観測をするに当たり、透視像上に現れたボイドがX線透視方向にどのような深さで存在しているのかを特定することはできない。
【0004】
このようなX線透視装置を用いて、ボイド等の3次元位置を把握するには、例えば透視方向を複数に変更し、観察者が各方向からの透視像上でボイドの像を見て、大まかな3次元位置を想像するしかない。
【0005】
ここで、物品内部の構造等を3次元表示する手法としては、X線CT装置が存在するが、撮影や再構成演算に時間が掛かるため、迅速性を要求される検査等には使えないし、装置が高価なものとなる。
【0006】
また,X線透視を用いて物品内部を3次元表示する方法として、従来、X線ステレオ表示と称される手法が知られている(例えば特許文献1参照)。この特許文献1におけるX線ステレオ表示は、X線源とX線検出器の間に、透視対象物を搭載してX線光軸に対して傾斜可能なする傾斜テーブルを配置し、その傾斜テーブルを互いに異なる2つの傾斜角度に設定した状態でそれぞれ透視対象物のX線透視像を取得し、各傾斜角度におけるX線透視像を、観察者の視差に擬して重畳表示して赤青メガネで観察するアナグリフ立体表示や、裸眼立体視による交差法立体表示等を行う方法である。
【特許文献1】特開2006−220640号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、通常のX線透視装置を用いた透視においては、対象物内部のボイド等の欠陥が1個であれば、複数方向から透視した各X線透視像から、ボイドの3次元位置を観測者がある程度想像することができるが、ボイドが複数個存在すると、透視方向によってボイドの投影位置や形状が変わるので、例えば一つの透視方向からのX線透視像上で注目したボイドが他の透視方向からのX線透視像上でどのボイド像になるのか対応付けることが困難であり、その結果、ボイドの3次元位置を想像することは実質的に不可能である。
【0008】
また、X線透視によるステレオ表示においては、複数個のボイドが存在していても、ある程度の3次元的な位置の推定が可能であるが、各ボイド相互の前後関係は把握できるものの、正確な3次元位置情報や、ボイドの立体的な概略形状は把握することができないという問題がある。
【0009】
本発明はこのような実情に鑑みてなされたもので、X線CT装置を用いることなく、X線透視を行うことにより、アルミダイキャスト部品のボイド等の欠陥をはじとめして、透視対象物の内部に存在する特異部位の3次元位置情報を正確に知ることができ、また、その3次元形状の概略を知ることが可能なX線透視による3次元観測方法と、その方法を用いたX線透視装置の提供をその課題としている。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、本発明のX線透視による3次元観測方法は、X線源とX線検出器の間に透視対象物を配置し、その透視対象物に対するX線源とX線検出器の相対位置を変化させることにより、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得し、その各X線透視像上で、あらかじめ設定されている特異部位の像を抽出するとともに、各透視方向のX線透視像上で抽出された特異部位の像を対応付けした後、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を得たときのX線源とX線検出器の透視対象物に対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出することによって特徴づけられる(請求項1)。
【0011】
ここで、本発明においては、上記透視方向を相違させた少なくとも3方向からのX線透視像を取得する方法として、X線源とX線検出器を透視対象物に対して移動させ、その各移動位置においてX線透視像を取得する方法(請求項2)、あるいは、X線源とX線検出器に対して透視対象物を移動させ,その各移動位置においてX線透視像を取得する方法(請求項3)、もしくは、X線源とX線検出器の対を互いに異なる位置に3対以上設けることによって、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得する方法(請求項4)、のいずれかを採用することができる。
【0012】
一方、本発明のX線透視装置は、互いに対向配置されたX線源とX線検出器と、これらの間に配置され、透視対象物を搭載する試料ステージと、上記X線検出器の出力に基づく試料ステージ上の透視対象物のX線透過データを用いて、当該透視対象物のX線透視像を構築して表示器に表示する表示手段と、上記X線源、X線検出器、および試料ステージの相対位置を変化させることにより、試料ステージ上の透視対象物の透視方向を変化させる移動機構を備えたX線透視装置において、上記移動機構を駆動して上記試料ステージに対するX線源およびX線検出器の相対位置をあらかじめ設定されている位置に変化させることにより、透視方向を少なくとも3方向に相違させてX線透視像を取得し、記憶手段に記憶させる制御手段と、各透視方向のX線透視像から、あらかじめ設定されている特異部位の像を抽出する画像処理手段と、その各X線透視像上で抽出された特異部位の像を対応づけし、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を取得したときのX線源とX線検出器の試料ステージに対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出する演算手段を備えていることによって特徴づけられる(請求項5)。
【0013】
また、本発明のX線透視装置においては、上記各透視方向からのX線透視像を同時に、もしくは選択的に個別に表示するとともに、その各X線透視像のうち、任意の一つのX線透視像上で特異部位の像を指定することにより、他の透視方向からのX線透視像上に、指定された特異部位の像を指し示すマークを表示器に表示する表示制御手段を備えている構成(請求項6)を採用することができる。
【0014】
また、本発明のX線透視装置においては、上記に代えて、透視対象物のサーフェースモデルを表示するとともに、そのサーフェースモデルに重ね合わせて、上記演算手段により演算された特異部位の3次元位置および/または3次元形状を表示する表示制御手段を備えている構成(請求項7)を採用することもできる。
【0015】
本発明は、透視対象物を互いに異なる少なくとも3方向から透視することにより、透視対象物内部に存在するボイド等の特異部位の像を3方向から撮影し、各透視時における透視対象物に対するX線源とX線検出器の位置3次元位置情報から、特異部位の3次元位置情報および/または3次元形状を求めることで、課題を解決しようとするものである。
【0016】
すなわち、各透視方向からのX線透視像から特異部位の像を抽出し、各X線透視像上での特異部位の像を対応づけする。特異部位が複数個あっても、後述する図8に示す手法等を用いることによって各特異部位ごとの対応づけが可能である。対応づけされた特異部位の像の透視方向が互いに異なる3方向からのX線透視像上での位置情報と、各X線透視像を取得したときの透視対象物に対するX線源とX線検出器の3次元位置情報を用いることで、後述する図9に例示する手法等を用いることで、特異部位の3次元位置情報を求めることができ、また、特異部位の概略の3次元形状を求めることができる。
【0017】
本発明のX線透視装置において、演算手段により求められた特異部位の3次元位置情報を表示する手法としては、特に限定されることなく、例えは請求項6に係る発明のように、互いに異なる透視方向からのX線透視像を同時もしくは選択的に表示し、一つのX線透視像上で特異部位の像を指示することにより、他の透視方向からのX線透視像上で対応する特異部位の像を指し示すマークを表示する方法を採用することができ、この方法によれば、透視対象物内に複数のボイド等の特異部位が存在していても、オペレータは3つのX線透視像上で特定の特異部位の位置を知ることができ、透視対象物上の特異部位の実空間上での位置を感覚的に把握しやすい。なお、本発明においては、算出された特異部位の3次元座標の数値表示を併用することを妨げない。
【0018】
また、演算手段により求められた特異部位の2次元位置情報を表示する他の手法としては、請求項7に係る発明のように、例えば3DCADデータ等のサーフェースモデルに、特異部位の像を重ね合わせて表示する方法を採用することができ、この場合、多数の特異部位が存在していても、オペレータは一目で各特異部位の透視対象物上での位置を把握することができる。
【発明の効果】
【0019】
本発明によれば、透視方向を少なくとも3方向に相違させて透視対象物を透視してX線透視像を取得することにより、透視対象物の内部に存在する欠陥等の特異部位の3次元位置情報、あるいは概略の3次元形状を知ることができ、X線CT装置を用いる場合に比して、その所要時間を大幅に短縮化することができる。特に、生産ラインにおける欠陥検査等においては、X線CT装置を用いる場合には抜き取り検査しかできなかったが、本発明方法ないしは装置の採用により、全数の検査が可能となる。
【発明を実施するための最良の形態】
【0020】
以下、図面を参照しつつ本発明の実施の形態について説明する。
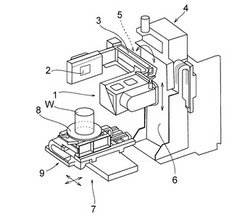
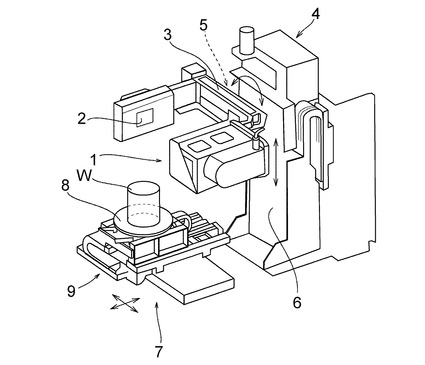
図1は本発明の実施の形態の外観図であり、図2はその全体のシステム構成を表すブロック図である。
【0021】
図1に示すように、X線源1とX線検出器2は互いに対向した状態で共通の支持アーム3に支持されている。支持アーム3はコラム4に対して傾動機構5およびZステージ6を介して支承されており、傾動機構5の駆動により、X線源1とX線検出器2は対向状態を維持しつつ水平軸の回りに傾動(旋回)するとともに、Zステージ6の駆動によって、X線源1とX線検出器2の対は同じく対向状態を維持しつつ、傾動機構5とともに鉛直方向(z軸方向)に移動する。
【0022】
X線源1はコーンビーム状のX線を発生し、X線検出器2は例えばFPD(フラットパネルディテクタ)等の2次元X線検出器である。
【0023】
コラム4に隣接して試料ステージ7が配置されている。試料ステージ7は透視対象物Wを搭載して鉛直の回転軸の回りに回転する回転テーブル8と、その回転テーブル8を水平面上で互いに直交する2軸方向に移動させるXYテーブル9を主体として構成されている。透視対象物WのX線透視を行うに当たっては、回転テーブル8上に搭載されている透視対象物WがX線源1とX線検出器2の間に位置するように支持アーム3をz軸方向移動させるとともに、XYテーブル9をX線光軸に直交するy軸方向に位置決めして透視領域を定める。また、その透視倍率はXYテーブル9をX線光軸方向に移動させることによって変化させることができる。
【0024】
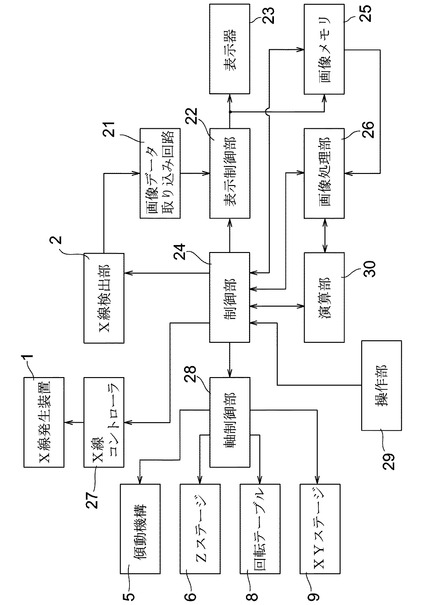
図2に示すように、X線検出器の出力は画像データ取り込み回路21を介して表示制御部22に取り込まれ、透視対象物WのX線透視像が構築されて実質的にリアルタイムで表示器23に表示される。表示制御部22により構築されて表示器23に表示されるX線透視像は、後述するタイミングで供給される制御部24からの指令の発生時に画像メモリ25にも転送されて記憶される。
【0025】
画像メモリ25に記憶されたX線透視像は、制御部24からの指令により画像処理部26に送られ、この画像処理部26では、後述するように透視対象物WののX線透視像上で、あらかじめ設定されている特異部位、例えばボイドをはじめとする欠陥等、の像を抽出する。
【0026】
制御部24は、上記した表示制御部22、画像メモリ25、画像処理部26のほか、X線源1の管電流や管電圧をコントロールするX線コントローラ27や、前記した傾動機構5、Zステージ6、回転テーブル8およびXYテーブル9をのアクチュエータに対して駆動制御信号を供給する軸制御部28をも制御下に置いている。
【0027】
また、制御部24には、ジョイスティックやマウス、キーボード等からなる操作部29が接続されており、この操作部29の操作により、軸制御部28を介して上記した傾動機構5、Zステージ6、回転テーブル8およびXYテーブル9に駆動制御信号を供給してこれらを随意に駆動することができる。また、この操作部29の操作により、後述する動作に必要な各種設定値等を設定することができる。そして、制御部24には演算部30が接続されており、この演算部30は、画像処理部26により処理された画像データを用いて以下に示す演算を行い、特異部位の3次元位置情報や概略の3次元形状を算出する。なお、この演算部30や制御部24、画像処理部26、表示制御部22等は実際にはコンピュータとその周辺機器によって構成され、コンピュータにインストールされているプログラムの実行により動作するのであるが、図2では、説明の便宜上、インストールされているプログラムが有する主要な機能ごとのブロック図で表している。
【0028】
次に、以上の構成からなる本発明の実施の形態の動作を、アルミダイキャスト部品内部のボイドの検査を行う場合を例にとって述べる。
【0029】
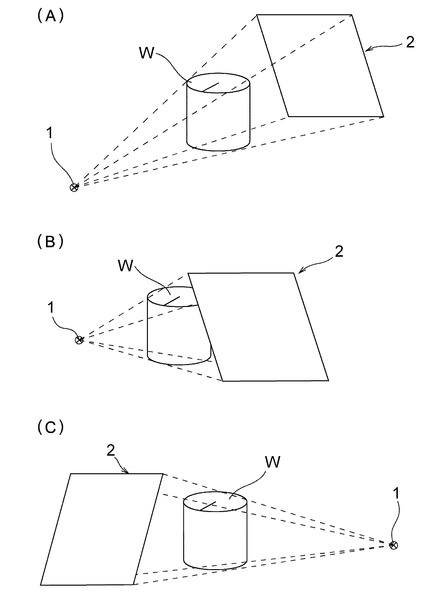
まず、透視対象物Wを回転テーブル8の上に載せ、操作部29を操作してZステージ6、回転テーブル8、XYテーブル9等を駆動し、透視対象物Wの全体もしくは所要領域のX線透視像が得られるように位置決めし、その状態を含めて合計3方向の透視方向を設定する。透視方向を3方向に変化させる手法としては、この実施の形態においては、傾動機構5ないしはZステージ6を駆動してX線源1とX線検出器2の対を移動させるか、あるいは、試料ステージ7の回転テーブル8を駆動して透視対象物Wを回転させることによって行うことができる。図3(A),(B)および(C)に3方向の透視方向の概念を、透視対象物Wを中心として表した図で示す。
【0030】
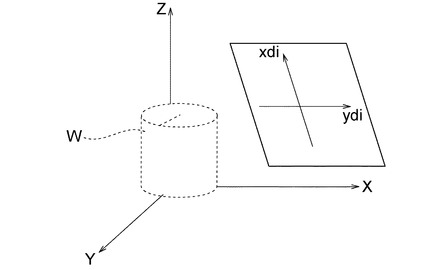
また、透視対象物Wを中心とした座標系を想定して空間座標を設定する。図4にその例を示す。なお、透視対象物Wを回転させて透視方向を変化させる場合には、観測される透視対象物Wが回転するに連れて実空間座標系が回転することになるので、実空間座標系の原点は回転テーブル9の回転中心軸上に設定しておくと便利である。
【0031】
図4の実空間座標系を説明すると、X線検出器2のキャリブレーションデータ、つまりX線検出器2の中心位置の実空間座標は[表1]に示す通りであり、X線検出器2の横方向1画素分の実空間変位量(寸法)および同じく縦方向1画素分の実空間変位量(寸法)はそれぞれ[表2]および[表3]に示す通りである。ここで、記号の末尾に付されている数字1,2,3は、透視方向を表している。
【0032】
【表1】

【0033】
【表2】
【0034】
【表3】
また、X線源1(焦点)の位置は下記の[表4]に示す通りであり、この位置から円錐形状にX線が放射される。
【0035】
【表4】
また、以下の演算においては、i=1,2,3を透視方向とし、xdi,ydiをX線検出器2上の2次元座標とする(X線検出器2の中心がxdi=0,ydi=0とする)。
【0036】
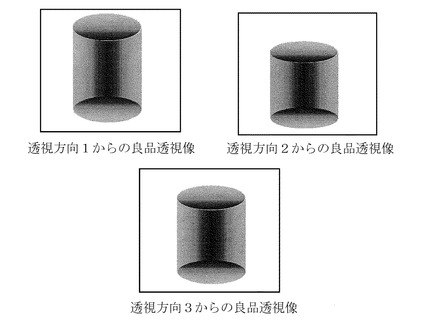
実際の検査作業に先立ち、透視対象物Wのボイドを抽出しやすいように、図5に例示するようにボイドの存在しない良品の透視画像をあらかじめ設定されている各透視方向1〜3ごとに透視撮影し、その各透視像を画像メモリ25に記憶しておく。
【0037】
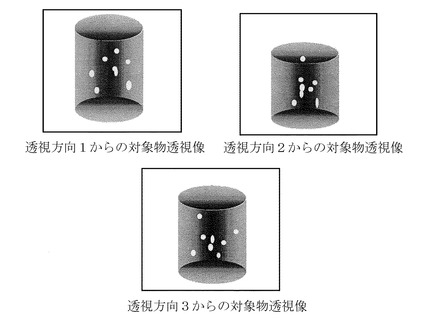
実際の検査作業においては、透視対象物Wを良品の撮影時と同じ位置・同じ姿勢で回転テーブル8上に載せて操作部29から指令を与えることにより、制御部24から軸制御部28を経由してX線源1とX線検出器2の対、もしくは試料ステージ7に駆動制御信号を供給し、良品の撮影時と同様にあらかじめ設定されている透視方向1〜3から透視撮影する。各透視方向から透視撮影するごとに、その透視像は画像メモリ25に記憶される。透視対象物Wにボイドが存在する場合には、図6に例示するような透視像が得られる。
【0038】
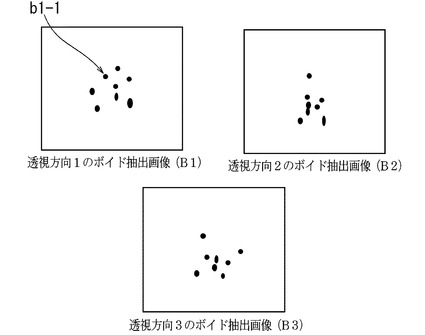
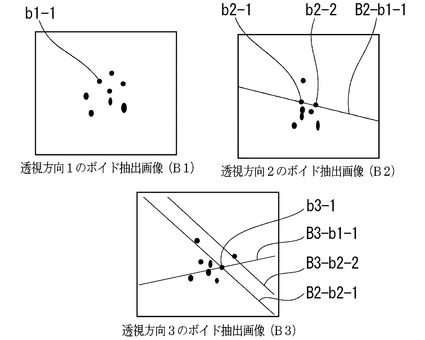
次に、各透視方向1〜3からの対象物Wの透視像と、先に記憶している良品の該当方向からの透視像とが画像処理部26において比較され、ボイドの像が抽出される。この抽出処理の方法は特に限定されるものではないが、例えば同じ方向からの良品の透視像と対象物の透視像を減算し、その絶対値をとり、あらかじめ設定したしきい値との大小関係によって2値化することにより、図7に示すようなボイド抽出画像が各透視方向ごとに得られる。この図7において黒い部分がボイドと認識される。
【0039】
画像処理部26においては、次に、以下に示すように各ボイド抽出画像B1〜B3から、黒い部分(ボイドに対応する像)の重心を求める。すなわち、図7の透視方向1からのボイド抽出画像(B1)中における黒い部分、例えばb1−1に着目し、その重心の実空間位置を求める。ここで、黒い塊の抽出は画像処理で一般的なラベリング手法などで行うものとするが、特に限定されるものではない。画像B1におけるb1−1の重心の空間座標は簡単に求めることができる。例えば、透視方向1のX線検出器2上の2次元座標で、その重心位置がX線検出器2の中心からx方向にNx画素目、y方向にNy画素目に位置していたとすると、b1−1の実空間座標は以下の式(1)で表される。
【0040】
【数1】
【0041】
次に、以上の重心の実空間位置と透視方向1におけるX線源1の位置とを結ぶ直線を求める。この直線上にあるものは、透視方向1において、b1−1の重心に結像することになる。ちなみに、この直線の方程式は2点を通る直線方程式により簡単に求まる。
【0042】
【数2】
【0043】
次に、以上の直線を、透視方向2におけるX線検出器2で観測したと仮定した線を、透視方向2におけるX線検出器2上の2次元座標系(透視方向2からのボイド抽出画像上)に引く。これが図8の透視方向2のボイド抽出画像(B2)に示される視軸線B2−b1−1である。なお、B2−b1−1は、透視方向2のX線検出器2の有感面と、前記式(2)で表される直線と透視方向2のX線源1の位置により決まる面との交線であるので、一意に決めることができる。
【0044】
図8の透視方向2のボイド抽出画像(B2)によれば、視軸線B2−b1−1のライン上に2つの黒い塊がある。b2−1,b2−2のどちらかがb1−1に対応するボイド像であるわけである。どちから不明であるので、透視方向2のX線検出器2上のb2−1,b2−2の重心を求め、前記したb1−1の視軸線B1−b1−1を引いた要領と同様に、透視方向3におけるX線検出器2上の2次元座標系に視軸線B3−b2−1,B3−b2−2を引く。また、式(2)の直線を透視方向3のX線検出器2上の2次元座標系に引く。図8の透視方向3のボイド抽出画像(B3)にこれらの視軸線が表されている。
【0045】
この図8の透視方向3のボイド抽出画像(B3)によれば、視軸線B3−b1−1と視軸線B3−b2−1の交点には、黒い塊が存在し、視軸線B3−b1−1と視軸線B3−b2−2の交点には黒い塊が存在しないことがわかる。視軸線の交点に黒い塊が存在することにより、ボイド抽出画像B1のボイド像b1−1に対応するボイド像は、ボイド抽出画像B2のボイド像b2−1、ボイド抽出画像B3のボイド像b3−1であることが判明する。
【0046】
以上の処理を、ボイド抽出画像B1上の各黒い塊について実施することにより、各透視方向におけるボイド抽出画像において、各ボイド像どうしの対応付けを行うことができる。
【0047】
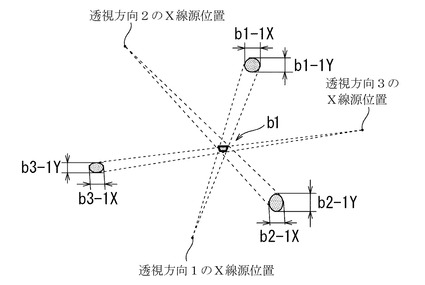
次に、上記のように対応付けられたボイド像b1−1,b2−1,b3−1を用いて、実空間上でのボイド位置を特定するとともに、そのボイドのおおよその3次元形状を求める。
【0048】
図9にその手法の説明図を示す。図8の各透視方向からのボイド抽出画像B1,B2,B3をラベリングしたデータよりb1−1,b2−1,b3−1の縦横のサイズを算出する。そのサイズをそれぞれb1−1X,b1−1Y、b2−1X,b2−1Y、b3−1X,b3−1Yとする。このサイズと重心位置をもとに、b1−1,b2−1,b3−1の近似楕円を底面とし、それぞれのX線源1を頂点とする楕円錐を実空間座標系において算出する。そして、これらの3つの楕円錐が重なった部分を実空間上のボイドと近似し、b1とする。これによって透視方向1〜3においてb1−1,b2−1,b3−1として現れたボイドb1の実空間座標と、3次元近似形状が求められたことになる。
【0049】
同様のことを各黒塊について対応付けを行ったうえで実行し、それぞれのボイドの実空間の位置と近似外形を求める。
【0050】
以上の手順により、複数のボイドの実空間上の位置と近似外形を求めることができ、その求めた結果の表示については、以下のものを採用することができる。
【0051】
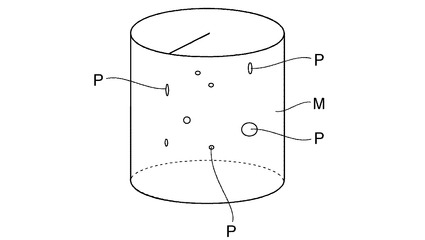
その一つは、例えば3DCADシステムと類似のシステムを装置に持たせるか、あるいは3DCADシステムとリンクさせ、図10に例示するように、検査物のサーフェースモデルMと重ね合わせて、ボイドの近似外形図Pを表示器23に表示する。ここで言うサーフェースモデルとは、立体的な物品の輪郭を表す線画(ワイヤフレームモデル)に、面のデータを付け加えた立体表現方法に基づく3次元モデルである。
【0052】
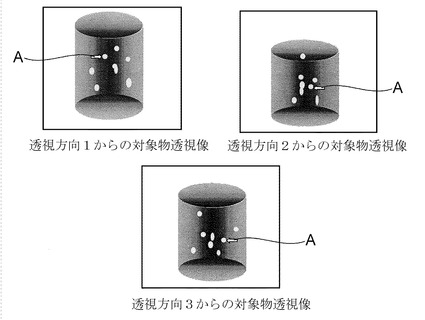
また、他の一つは、図11に例示するように、各透視方向1〜3からの対象物Wの透視像を個々に表示し、そのうちの一つの透視像上、例えば透視方向1の対象物透視像上でb1−1のボイド像をクリックすることにより、他の各対象物透視像上における対応するボイド像も含めて、矢印A等を透視像上に重畳表示する方法も採用することができる。この各透視方向からの対象物透視像は、表示器23に同時に表示してもよいし、操作部29の操作により表示器23に選択的に呼び出して表示してもよい。また、いずれの表示方法を採用するにしても、各ボイドの3次元位置情報を数値で表示することを併用することが好ましい。
【0053】
ここで、以上の実施の形態において、例えばボイド像の抽出方法やその重心位置を求める方法としては、前記した方法のほか、他の公知の方法、例えばラインプロファイルを2次微分してそのピーク位置を求める等、を適宜に採用し得ることは勿論である。
【0054】
また、以上の実施の形態においては、透視方向を3方向に変化させる方法として、X線源1とX線検出器2の対と、透視対象物Wとの相対位置を変化させる方法を採用したが、3対のX線源とX線検出器を設け、一つの透視対象物Wに対してこれらの各対のX線源とX線検出器の対で透視する方法も採用することができる。
【0055】
更に、以上の説明においては、透視方向を3方向としたが、それよりも多い方向から透視を行い、その各透視方向からの透視像のうち、よりボイドが明確に現れている任意の3つの透視像を用いて、上記した説明と同等の方法によってボイドの位置や近似外形を求めてもよく、この方法の採用により、精度をより向上させることができる。
【0056】
また、以上はアルミダイキャスト部品内に存在するボイドを特異部位として、その検査を行う場合を例にとって説明したが、本発明はこれに限定されることなく、透視対象物は任意の物品とすることができ、その内部の特異部位としては、他の欠陥や特定の構造部位等とし得ることは勿論である。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態の外観図である。
【図2】本発明の実施の形態の全体のシステム構成を表すブロック図である。
【図3】本発明の実施の形態における3方向の透視方向を、透視対象物Wを中心として示す概念図である。
【図4】本発明の実施の形態で用いる空間座標の例の説明図である。
【図5】本発明の実施の形態であらかじめ撮影される、良品の3つの透視方向からのX線透視像の例の説明図である。
【図6】ボイドが存在する透視対象物Wの3つの透視方向からのX線透視像の例の説明図である。
【図7】図6の各方向からのX線透視像から、ボイドを抽出した画像の例の説明図である。
【図8】本発明の実施の形態において、図6の各画像上のボイド像を対応づけする手法の説明図である。
【図9】本発明の実施の形態において、対応付けられたボイド像b1−1,b2−1,b3−1を用いて、実空間上でのボイド位置を特定するとともに、そのボイドのおおよその3次元形状を求める手法の説明図である。
【図10】本発明の実施の形態において透視対象物W内に存在するボイドの3次元位置と概略の3次元形状をサーフェースモデルを用いて表示する例の説明図である。
【図11】本発明の実施の形態におけるボイドの位置の他の表示方法の説明図で、3方向からの対象物透視像上で、対応するボイド像を指示する表示方法の例の説明図である。
【符号の説明】
【0058】
1 X線源
2 X線検出器
3 支持アーム
4 コラム
5 傾動機構
6 Zステージ¥
7 試料ステージ
8 回転テーブル
9 XYテーブル
21 画像データ取り込み回路
22 表示制御部
23 表示器
24 制御部
25 画像メモリ
26 画像処理部
27 X線コントローラ
28 軸制御部
29 操作部
30 演算部
W 透視対象物
【技術分野】
【0001】
本発明は、物品にX線を照射し、その透過X線をX線検出器で検出することによって物品のX線透視を行う手法を用いて、物品を3次元観察する方法と、その3次元観察方法を用いたX線透視装置に関し、特に、例えばアルミダイキャスト部品の内部に存在するボイド等の欠陥検査等に適した方法並びに装置に関する。
【背景技術】
【0002】
例えばアルミダイキャスト部品のボイド等の検査や観測には、X線透視装置が多用されている。X線透視装置は、一般に、互いに対向配置されたX線源とX線検出器の間に、対象物を搭載する試料ステージが設けられた構造をもち、X線源からのX線を対象物に照射し、その透過X線をX線検出器で検出し、その出力を用いて対象物のX線透視像を表示器に表示する。
【0003】
ここで、X線透視においては、対象物の内部構造を素早く可視化することができる点において優れているが、X線透視により得られる像には、X線が透過した全ての部位の情報が重なって表示されるため、例えばアルミダイキャスト部品のボイドの検査ないしは観測をするに当たり、透視像上に現れたボイドがX線透視方向にどのような深さで存在しているのかを特定することはできない。
【0004】
このようなX線透視装置を用いて、ボイド等の3次元位置を把握するには、例えば透視方向を複数に変更し、観察者が各方向からの透視像上でボイドの像を見て、大まかな3次元位置を想像するしかない。
【0005】
ここで、物品内部の構造等を3次元表示する手法としては、X線CT装置が存在するが、撮影や再構成演算に時間が掛かるため、迅速性を要求される検査等には使えないし、装置が高価なものとなる。
【0006】
また,X線透視を用いて物品内部を3次元表示する方法として、従来、X線ステレオ表示と称される手法が知られている(例えば特許文献1参照)。この特許文献1におけるX線ステレオ表示は、X線源とX線検出器の間に、透視対象物を搭載してX線光軸に対して傾斜可能なする傾斜テーブルを配置し、その傾斜テーブルを互いに異なる2つの傾斜角度に設定した状態でそれぞれ透視対象物のX線透視像を取得し、各傾斜角度におけるX線透視像を、観察者の視差に擬して重畳表示して赤青メガネで観察するアナグリフ立体表示や、裸眼立体視による交差法立体表示等を行う方法である。
【特許文献1】特開2006−220640号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、通常のX線透視装置を用いた透視においては、対象物内部のボイド等の欠陥が1個であれば、複数方向から透視した各X線透視像から、ボイドの3次元位置を観測者がある程度想像することができるが、ボイドが複数個存在すると、透視方向によってボイドの投影位置や形状が変わるので、例えば一つの透視方向からのX線透視像上で注目したボイドが他の透視方向からのX線透視像上でどのボイド像になるのか対応付けることが困難であり、その結果、ボイドの3次元位置を想像することは実質的に不可能である。
【0008】
また、X線透視によるステレオ表示においては、複数個のボイドが存在していても、ある程度の3次元的な位置の推定が可能であるが、各ボイド相互の前後関係は把握できるものの、正確な3次元位置情報や、ボイドの立体的な概略形状は把握することができないという問題がある。
【0009】
本発明はこのような実情に鑑みてなされたもので、X線CT装置を用いることなく、X線透視を行うことにより、アルミダイキャスト部品のボイド等の欠陥をはじとめして、透視対象物の内部に存在する特異部位の3次元位置情報を正確に知ることができ、また、その3次元形状の概略を知ることが可能なX線透視による3次元観測方法と、その方法を用いたX線透視装置の提供をその課題としている。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、本発明のX線透視による3次元観測方法は、X線源とX線検出器の間に透視対象物を配置し、その透視対象物に対するX線源とX線検出器の相対位置を変化させることにより、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得し、その各X線透視像上で、あらかじめ設定されている特異部位の像を抽出するとともに、各透視方向のX線透視像上で抽出された特異部位の像を対応付けした後、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を得たときのX線源とX線検出器の透視対象物に対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出することによって特徴づけられる(請求項1)。
【0011】
ここで、本発明においては、上記透視方向を相違させた少なくとも3方向からのX線透視像を取得する方法として、X線源とX線検出器を透視対象物に対して移動させ、その各移動位置においてX線透視像を取得する方法(請求項2)、あるいは、X線源とX線検出器に対して透視対象物を移動させ,その各移動位置においてX線透視像を取得する方法(請求項3)、もしくは、X線源とX線検出器の対を互いに異なる位置に3対以上設けることによって、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得する方法(請求項4)、のいずれかを採用することができる。
【0012】
一方、本発明のX線透視装置は、互いに対向配置されたX線源とX線検出器と、これらの間に配置され、透視対象物を搭載する試料ステージと、上記X線検出器の出力に基づく試料ステージ上の透視対象物のX線透過データを用いて、当該透視対象物のX線透視像を構築して表示器に表示する表示手段と、上記X線源、X線検出器、および試料ステージの相対位置を変化させることにより、試料ステージ上の透視対象物の透視方向を変化させる移動機構を備えたX線透視装置において、上記移動機構を駆動して上記試料ステージに対するX線源およびX線検出器の相対位置をあらかじめ設定されている位置に変化させることにより、透視方向を少なくとも3方向に相違させてX線透視像を取得し、記憶手段に記憶させる制御手段と、各透視方向のX線透視像から、あらかじめ設定されている特異部位の像を抽出する画像処理手段と、その各X線透視像上で抽出された特異部位の像を対応づけし、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を取得したときのX線源とX線検出器の試料ステージに対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出する演算手段を備えていることによって特徴づけられる(請求項5)。
【0013】
また、本発明のX線透視装置においては、上記各透視方向からのX線透視像を同時に、もしくは選択的に個別に表示するとともに、その各X線透視像のうち、任意の一つのX線透視像上で特異部位の像を指定することにより、他の透視方向からのX線透視像上に、指定された特異部位の像を指し示すマークを表示器に表示する表示制御手段を備えている構成(請求項6)を採用することができる。
【0014】
また、本発明のX線透視装置においては、上記に代えて、透視対象物のサーフェースモデルを表示するとともに、そのサーフェースモデルに重ね合わせて、上記演算手段により演算された特異部位の3次元位置および/または3次元形状を表示する表示制御手段を備えている構成(請求項7)を採用することもできる。
【0015】
本発明は、透視対象物を互いに異なる少なくとも3方向から透視することにより、透視対象物内部に存在するボイド等の特異部位の像を3方向から撮影し、各透視時における透視対象物に対するX線源とX線検出器の位置3次元位置情報から、特異部位の3次元位置情報および/または3次元形状を求めることで、課題を解決しようとするものである。
【0016】
すなわち、各透視方向からのX線透視像から特異部位の像を抽出し、各X線透視像上での特異部位の像を対応づけする。特異部位が複数個あっても、後述する図8に示す手法等を用いることによって各特異部位ごとの対応づけが可能である。対応づけされた特異部位の像の透視方向が互いに異なる3方向からのX線透視像上での位置情報と、各X線透視像を取得したときの透視対象物に対するX線源とX線検出器の3次元位置情報を用いることで、後述する図9に例示する手法等を用いることで、特異部位の3次元位置情報を求めることができ、また、特異部位の概略の3次元形状を求めることができる。
【0017】
本発明のX線透視装置において、演算手段により求められた特異部位の3次元位置情報を表示する手法としては、特に限定されることなく、例えは請求項6に係る発明のように、互いに異なる透視方向からのX線透視像を同時もしくは選択的に表示し、一つのX線透視像上で特異部位の像を指示することにより、他の透視方向からのX線透視像上で対応する特異部位の像を指し示すマークを表示する方法を採用することができ、この方法によれば、透視対象物内に複数のボイド等の特異部位が存在していても、オペレータは3つのX線透視像上で特定の特異部位の位置を知ることができ、透視対象物上の特異部位の実空間上での位置を感覚的に把握しやすい。なお、本発明においては、算出された特異部位の3次元座標の数値表示を併用することを妨げない。
【0018】
また、演算手段により求められた特異部位の2次元位置情報を表示する他の手法としては、請求項7に係る発明のように、例えば3DCADデータ等のサーフェースモデルに、特異部位の像を重ね合わせて表示する方法を採用することができ、この場合、多数の特異部位が存在していても、オペレータは一目で各特異部位の透視対象物上での位置を把握することができる。
【発明の効果】
【0019】
本発明によれば、透視方向を少なくとも3方向に相違させて透視対象物を透視してX線透視像を取得することにより、透視対象物の内部に存在する欠陥等の特異部位の3次元位置情報、あるいは概略の3次元形状を知ることができ、X線CT装置を用いる場合に比して、その所要時間を大幅に短縮化することができる。特に、生産ラインにおける欠陥検査等においては、X線CT装置を用いる場合には抜き取り検査しかできなかったが、本発明方法ないしは装置の採用により、全数の検査が可能となる。
【発明を実施するための最良の形態】
【0020】
以下、図面を参照しつつ本発明の実施の形態について説明する。
図1は本発明の実施の形態の外観図であり、図2はその全体のシステム構成を表すブロック図である。
【0021】
図1に示すように、X線源1とX線検出器2は互いに対向した状態で共通の支持アーム3に支持されている。支持アーム3はコラム4に対して傾動機構5およびZステージ6を介して支承されており、傾動機構5の駆動により、X線源1とX線検出器2は対向状態を維持しつつ水平軸の回りに傾動(旋回)するとともに、Zステージ6の駆動によって、X線源1とX線検出器2の対は同じく対向状態を維持しつつ、傾動機構5とともに鉛直方向(z軸方向)に移動する。
【0022】
X線源1はコーンビーム状のX線を発生し、X線検出器2は例えばFPD(フラットパネルディテクタ)等の2次元X線検出器である。
【0023】
コラム4に隣接して試料ステージ7が配置されている。試料ステージ7は透視対象物Wを搭載して鉛直の回転軸の回りに回転する回転テーブル8と、その回転テーブル8を水平面上で互いに直交する2軸方向に移動させるXYテーブル9を主体として構成されている。透視対象物WのX線透視を行うに当たっては、回転テーブル8上に搭載されている透視対象物WがX線源1とX線検出器2の間に位置するように支持アーム3をz軸方向移動させるとともに、XYテーブル9をX線光軸に直交するy軸方向に位置決めして透視領域を定める。また、その透視倍率はXYテーブル9をX線光軸方向に移動させることによって変化させることができる。
【0024】
図2に示すように、X線検出器の出力は画像データ取り込み回路21を介して表示制御部22に取り込まれ、透視対象物WのX線透視像が構築されて実質的にリアルタイムで表示器23に表示される。表示制御部22により構築されて表示器23に表示されるX線透視像は、後述するタイミングで供給される制御部24からの指令の発生時に画像メモリ25にも転送されて記憶される。
【0025】
画像メモリ25に記憶されたX線透視像は、制御部24からの指令により画像処理部26に送られ、この画像処理部26では、後述するように透視対象物WののX線透視像上で、あらかじめ設定されている特異部位、例えばボイドをはじめとする欠陥等、の像を抽出する。
【0026】
制御部24は、上記した表示制御部22、画像メモリ25、画像処理部26のほか、X線源1の管電流や管電圧をコントロールするX線コントローラ27や、前記した傾動機構5、Zステージ6、回転テーブル8およびXYテーブル9をのアクチュエータに対して駆動制御信号を供給する軸制御部28をも制御下に置いている。
【0027】
また、制御部24には、ジョイスティックやマウス、キーボード等からなる操作部29が接続されており、この操作部29の操作により、軸制御部28を介して上記した傾動機構5、Zステージ6、回転テーブル8およびXYテーブル9に駆動制御信号を供給してこれらを随意に駆動することができる。また、この操作部29の操作により、後述する動作に必要な各種設定値等を設定することができる。そして、制御部24には演算部30が接続されており、この演算部30は、画像処理部26により処理された画像データを用いて以下に示す演算を行い、特異部位の3次元位置情報や概略の3次元形状を算出する。なお、この演算部30や制御部24、画像処理部26、表示制御部22等は実際にはコンピュータとその周辺機器によって構成され、コンピュータにインストールされているプログラムの実行により動作するのであるが、図2では、説明の便宜上、インストールされているプログラムが有する主要な機能ごとのブロック図で表している。
【0028】
次に、以上の構成からなる本発明の実施の形態の動作を、アルミダイキャスト部品内部のボイドの検査を行う場合を例にとって述べる。
【0029】
まず、透視対象物Wを回転テーブル8の上に載せ、操作部29を操作してZステージ6、回転テーブル8、XYテーブル9等を駆動し、透視対象物Wの全体もしくは所要領域のX線透視像が得られるように位置決めし、その状態を含めて合計3方向の透視方向を設定する。透視方向を3方向に変化させる手法としては、この実施の形態においては、傾動機構5ないしはZステージ6を駆動してX線源1とX線検出器2の対を移動させるか、あるいは、試料ステージ7の回転テーブル8を駆動して透視対象物Wを回転させることによって行うことができる。図3(A),(B)および(C)に3方向の透視方向の概念を、透視対象物Wを中心として表した図で示す。
【0030】
また、透視対象物Wを中心とした座標系を想定して空間座標を設定する。図4にその例を示す。なお、透視対象物Wを回転させて透視方向を変化させる場合には、観測される透視対象物Wが回転するに連れて実空間座標系が回転することになるので、実空間座標系の原点は回転テーブル9の回転中心軸上に設定しておくと便利である。
【0031】
図4の実空間座標系を説明すると、X線検出器2のキャリブレーションデータ、つまりX線検出器2の中心位置の実空間座標は[表1]に示す通りであり、X線検出器2の横方向1画素分の実空間変位量(寸法)および同じく縦方向1画素分の実空間変位量(寸法)はそれぞれ[表2]および[表3]に示す通りである。ここで、記号の末尾に付されている数字1,2,3は、透視方向を表している。
【0032】
【表1】
【0033】
【表2】
【0034】
【表3】
また、X線源1(焦点)の位置は下記の[表4]に示す通りであり、この位置から円錐形状にX線が放射される。
【0035】
【表4】
また、以下の演算においては、i=1,2,3を透視方向とし、xdi,ydiをX線検出器2上の2次元座標とする(X線検出器2の中心がxdi=0,ydi=0とする)。
【0036】
実際の検査作業に先立ち、透視対象物Wのボイドを抽出しやすいように、図5に例示するようにボイドの存在しない良品の透視画像をあらかじめ設定されている各透視方向1〜3ごとに透視撮影し、その各透視像を画像メモリ25に記憶しておく。
【0037】
実際の検査作業においては、透視対象物Wを良品の撮影時と同じ位置・同じ姿勢で回転テーブル8上に載せて操作部29から指令を与えることにより、制御部24から軸制御部28を経由してX線源1とX線検出器2の対、もしくは試料ステージ7に駆動制御信号を供給し、良品の撮影時と同様にあらかじめ設定されている透視方向1〜3から透視撮影する。各透視方向から透視撮影するごとに、その透視像は画像メモリ25に記憶される。透視対象物Wにボイドが存在する場合には、図6に例示するような透視像が得られる。
【0038】
次に、各透視方向1〜3からの対象物Wの透視像と、先に記憶している良品の該当方向からの透視像とが画像処理部26において比較され、ボイドの像が抽出される。この抽出処理の方法は特に限定されるものではないが、例えば同じ方向からの良品の透視像と対象物の透視像を減算し、その絶対値をとり、あらかじめ設定したしきい値との大小関係によって2値化することにより、図7に示すようなボイド抽出画像が各透視方向ごとに得られる。この図7において黒い部分がボイドと認識される。
【0039】
画像処理部26においては、次に、以下に示すように各ボイド抽出画像B1〜B3から、黒い部分(ボイドに対応する像)の重心を求める。すなわち、図7の透視方向1からのボイド抽出画像(B1)中における黒い部分、例えばb1−1に着目し、その重心の実空間位置を求める。ここで、黒い塊の抽出は画像処理で一般的なラベリング手法などで行うものとするが、特に限定されるものではない。画像B1におけるb1−1の重心の空間座標は簡単に求めることができる。例えば、透視方向1のX線検出器2上の2次元座標で、その重心位置がX線検出器2の中心からx方向にNx画素目、y方向にNy画素目に位置していたとすると、b1−1の実空間座標は以下の式(1)で表される。
【0040】
【数1】
【0041】
次に、以上の重心の実空間位置と透視方向1におけるX線源1の位置とを結ぶ直線を求める。この直線上にあるものは、透視方向1において、b1−1の重心に結像することになる。ちなみに、この直線の方程式は2点を通る直線方程式により簡単に求まる。
【0042】
【数2】
【0043】
次に、以上の直線を、透視方向2におけるX線検出器2で観測したと仮定した線を、透視方向2におけるX線検出器2上の2次元座標系(透視方向2からのボイド抽出画像上)に引く。これが図8の透視方向2のボイド抽出画像(B2)に示される視軸線B2−b1−1である。なお、B2−b1−1は、透視方向2のX線検出器2の有感面と、前記式(2)で表される直線と透視方向2のX線源1の位置により決まる面との交線であるので、一意に決めることができる。
【0044】
図8の透視方向2のボイド抽出画像(B2)によれば、視軸線B2−b1−1のライン上に2つの黒い塊がある。b2−1,b2−2のどちらかがb1−1に対応するボイド像であるわけである。どちから不明であるので、透視方向2のX線検出器2上のb2−1,b2−2の重心を求め、前記したb1−1の視軸線B1−b1−1を引いた要領と同様に、透視方向3におけるX線検出器2上の2次元座標系に視軸線B3−b2−1,B3−b2−2を引く。また、式(2)の直線を透視方向3のX線検出器2上の2次元座標系に引く。図8の透視方向3のボイド抽出画像(B3)にこれらの視軸線が表されている。
【0045】
この図8の透視方向3のボイド抽出画像(B3)によれば、視軸線B3−b1−1と視軸線B3−b2−1の交点には、黒い塊が存在し、視軸線B3−b1−1と視軸線B3−b2−2の交点には黒い塊が存在しないことがわかる。視軸線の交点に黒い塊が存在することにより、ボイド抽出画像B1のボイド像b1−1に対応するボイド像は、ボイド抽出画像B2のボイド像b2−1、ボイド抽出画像B3のボイド像b3−1であることが判明する。
【0046】
以上の処理を、ボイド抽出画像B1上の各黒い塊について実施することにより、各透視方向におけるボイド抽出画像において、各ボイド像どうしの対応付けを行うことができる。
【0047】
次に、上記のように対応付けられたボイド像b1−1,b2−1,b3−1を用いて、実空間上でのボイド位置を特定するとともに、そのボイドのおおよその3次元形状を求める。
【0048】
図9にその手法の説明図を示す。図8の各透視方向からのボイド抽出画像B1,B2,B3をラベリングしたデータよりb1−1,b2−1,b3−1の縦横のサイズを算出する。そのサイズをそれぞれb1−1X,b1−1Y、b2−1X,b2−1Y、b3−1X,b3−1Yとする。このサイズと重心位置をもとに、b1−1,b2−1,b3−1の近似楕円を底面とし、それぞれのX線源1を頂点とする楕円錐を実空間座標系において算出する。そして、これらの3つの楕円錐が重なった部分を実空間上のボイドと近似し、b1とする。これによって透視方向1〜3においてb1−1,b2−1,b3−1として現れたボイドb1の実空間座標と、3次元近似形状が求められたことになる。
【0049】
同様のことを各黒塊について対応付けを行ったうえで実行し、それぞれのボイドの実空間の位置と近似外形を求める。
【0050】
以上の手順により、複数のボイドの実空間上の位置と近似外形を求めることができ、その求めた結果の表示については、以下のものを採用することができる。
【0051】
その一つは、例えば3DCADシステムと類似のシステムを装置に持たせるか、あるいは3DCADシステムとリンクさせ、図10に例示するように、検査物のサーフェースモデルMと重ね合わせて、ボイドの近似外形図Pを表示器23に表示する。ここで言うサーフェースモデルとは、立体的な物品の輪郭を表す線画(ワイヤフレームモデル)に、面のデータを付け加えた立体表現方法に基づく3次元モデルである。
【0052】
また、他の一つは、図11に例示するように、各透視方向1〜3からの対象物Wの透視像を個々に表示し、そのうちの一つの透視像上、例えば透視方向1の対象物透視像上でb1−1のボイド像をクリックすることにより、他の各対象物透視像上における対応するボイド像も含めて、矢印A等を透視像上に重畳表示する方法も採用することができる。この各透視方向からの対象物透視像は、表示器23に同時に表示してもよいし、操作部29の操作により表示器23に選択的に呼び出して表示してもよい。また、いずれの表示方法を採用するにしても、各ボイドの3次元位置情報を数値で表示することを併用することが好ましい。
【0053】
ここで、以上の実施の形態において、例えばボイド像の抽出方法やその重心位置を求める方法としては、前記した方法のほか、他の公知の方法、例えばラインプロファイルを2次微分してそのピーク位置を求める等、を適宜に採用し得ることは勿論である。
【0054】
また、以上の実施の形態においては、透視方向を3方向に変化させる方法として、X線源1とX線検出器2の対と、透視対象物Wとの相対位置を変化させる方法を採用したが、3対のX線源とX線検出器を設け、一つの透視対象物Wに対してこれらの各対のX線源とX線検出器の対で透視する方法も採用することができる。
【0055】
更に、以上の説明においては、透視方向を3方向としたが、それよりも多い方向から透視を行い、その各透視方向からの透視像のうち、よりボイドが明確に現れている任意の3つの透視像を用いて、上記した説明と同等の方法によってボイドの位置や近似外形を求めてもよく、この方法の採用により、精度をより向上させることができる。
【0056】
また、以上はアルミダイキャスト部品内に存在するボイドを特異部位として、その検査を行う場合を例にとって説明したが、本発明はこれに限定されることなく、透視対象物は任意の物品とすることができ、その内部の特異部位としては、他の欠陥や特定の構造部位等とし得ることは勿論である。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態の外観図である。
【図2】本発明の実施の形態の全体のシステム構成を表すブロック図である。
【図3】本発明の実施の形態における3方向の透視方向を、透視対象物Wを中心として示す概念図である。
【図4】本発明の実施の形態で用いる空間座標の例の説明図である。
【図5】本発明の実施の形態であらかじめ撮影される、良品の3つの透視方向からのX線透視像の例の説明図である。
【図6】ボイドが存在する透視対象物Wの3つの透視方向からのX線透視像の例の説明図である。
【図7】図6の各方向からのX線透視像から、ボイドを抽出した画像の例の説明図である。
【図8】本発明の実施の形態において、図6の各画像上のボイド像を対応づけする手法の説明図である。
【図9】本発明の実施の形態において、対応付けられたボイド像b1−1,b2−1,b3−1を用いて、実空間上でのボイド位置を特定するとともに、そのボイドのおおよその3次元形状を求める手法の説明図である。
【図10】本発明の実施の形態において透視対象物W内に存在するボイドの3次元位置と概略の3次元形状をサーフェースモデルを用いて表示する例の説明図である。
【図11】本発明の実施の形態におけるボイドの位置の他の表示方法の説明図で、3方向からの対象物透視像上で、対応するボイド像を指示する表示方法の例の説明図である。
【符号の説明】
【0058】
1 X線源
2 X線検出器
3 支持アーム
4 コラム
5 傾動機構
6 Zステージ¥
7 試料ステージ
8 回転テーブル
9 XYテーブル
21 画像データ取り込み回路
22 表示制御部
23 表示器
24 制御部
25 画像メモリ
26 画像処理部
27 X線コントローラ
28 軸制御部
29 操作部
30 演算部
W 透視対象物
【特許請求の範囲】
【請求項1】
X線源とX線検出器の間に透視対象物を配置し、その透視対象物に対するX線源とX線検出器の相対位置を変化させることにより、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得し、その各X線透視像上で、あらかじめ設定されている特異部位の像を抽出するとともに、各透視方向のX線透視像上で抽出された特異部位の像を対応付けした後、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を得たときのX線源とX線検出器の透視対象物に対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出することを特徴とするX線透視による3次元観測方法。
【請求項2】
上記透視方向を、X線源とX線検出器を透視対象物に対して移動させることによって相違させることを特徴とする請求項1に記載のX線透視による3次元観測方法。
【請求項3】
上記透視方向を、X線源とX線検出器に対して透視対象物を移動させることによって相違させることを特徴とする請求項1に記載のX線透視による3次元観測方法。
【請求項4】
X線源とX線検出器の対を互いに異なる位置に3対以上設けることによって、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得することを特徴とする請求項1に記載のX線透視による3次元観測方法
【請求項5】
互いに対向配置されたX線源とX線検出器と、これらの間に配置され、透視対象物を搭載する試料ステージと、上記X線検出器の出力に基づく試料ステージ上の透視対象物のX線透過データを用いて、当該透視対象物のX線透視像を構築して表示器に表示する表示手段と、上記X線源、X線検出器、および試料ステージの相対位置を変化させることにより、試料ステージ上の透視対象物の透視方向を変化させる移動機構を備えたX線透視装置において、
上記移動機構を駆動して上記試料ステージに対するX線源およびX線検出器の相対位置をあらかじめ設定されている位置に変化させることにより、透視方向を少なくとも3方向に相違させてX線透視像を取得し、記憶手段に記憶させる制御手段と、各透視方向のX線透視像から、あらかじめ設定されている特異部位の像を抽出する画像処理手段と、その各X線透視像上で抽出された特異部位の像を対応づけし、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を取得したときのX線源とX線検出器の試料ステージに対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出する演算手段を備えていることを特徴とするX線透視装置。
【請求項6】
上記各透視方向からのX線透視像を同時に、もしくは選択的に個別に表示するとともに、その各X線透視像のうち、任意の一つのX線透視像上で特異部位の像を指定することにより、他の透視方向からのX線透視像上に、指定された特異部位の像を指し示すマークを表示器に表示する表示制御手段を備えていることを特徴とする請求項4に記載のX線透視装置。
【請求項7】
透視対象物のサーフェースモデルを表示するとともに、そのサーフェースモデルに重ね合わせて、上記演算手段により演算された特異部位の3次元位置および/または3次元形状を表示する表示制御手段を備えていることを特徴とする請求項5に記載のX線透視装置。
【請求項1】
X線源とX線検出器の間に透視対象物を配置し、その透視対象物に対するX線源とX線検出器の相対位置を変化させることにより、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得し、その各X線透視像上で、あらかじめ設定されている特異部位の像を抽出するとともに、各透視方向のX線透視像上で抽出された特異部位の像を対応付けした後、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を得たときのX線源とX線検出器の透視対象物に対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出することを特徴とするX線透視による3次元観測方法。
【請求項2】
上記透視方向を、X線源とX線検出器を透視対象物に対して移動させることによって相違させることを特徴とする請求項1に記載のX線透視による3次元観測方法。
【請求項3】
上記透視方向を、X線源とX線検出器に対して透視対象物を移動させることによって相違させることを特徴とする請求項1に記載のX線透視による3次元観測方法。
【請求項4】
X線源とX線検出器の対を互いに異なる位置に3対以上設けることによって、透視方向を少なくとも3方向に相違させた透視対象物のX線透視像を取得することを特徴とする請求項1に記載のX線透視による3次元観測方法
【請求項5】
互いに対向配置されたX線源とX線検出器と、これらの間に配置され、透視対象物を搭載する試料ステージと、上記X線検出器の出力に基づく試料ステージ上の透視対象物のX線透過データを用いて、当該透視対象物のX線透視像を構築して表示器に表示する表示手段と、上記X線源、X線検出器、および試料ステージの相対位置を変化させることにより、試料ステージ上の透視対象物の透視方向を変化させる移動機構を備えたX線透視装置において、
上記移動機構を駆動して上記試料ステージに対するX線源およびX線検出器の相対位置をあらかじめ設定されている位置に変化させることにより、透視方向を少なくとも3方向に相違させてX線透視像を取得し、記憶手段に記憶させる制御手段と、各透視方向のX線透視像から、あらかじめ設定されている特異部位の像を抽出する画像処理手段と、その各X線透視像上で抽出された特異部位の像を対応づけし、各透視方向のX線透視像上の特異部位の像と、これらの各X線透視像を取得したときのX線源とX線検出器の試料ステージに対する相対的な3次元位置情報とを用い、特異部位の3次元位置および/または3次元形状を算出する演算手段を備えていることを特徴とするX線透視装置。
【請求項6】
上記各透視方向からのX線透視像を同時に、もしくは選択的に個別に表示するとともに、その各X線透視像のうち、任意の一つのX線透視像上で特異部位の像を指定することにより、他の透視方向からのX線透視像上に、指定された特異部位の像を指し示すマークを表示器に表示する表示制御手段を備えていることを特徴とする請求項4に記載のX線透視装置。
【請求項7】
透視対象物のサーフェースモデルを表示するとともに、そのサーフェースモデルに重ね合わせて、上記演算手段により演算された特異部位の3次元位置および/または3次元形状を表示する表示制御手段を備えていることを特徴とする請求項5に記載のX線透視装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−174972(P2009−174972A)
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−13296(P2008−13296)
【出願日】平成20年1月24日(2008.1.24)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成20年1月24日(2008.1.24)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]