
X線透視撮影装置
【課題】検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる汎用性の高いX線透視撮影装置を提供する。
【解決手段】待機位置と透視撮影位置を結ぶ予め定められた複数の経路の中から1の経路を選択する。(a)に示すルームレイアウトの場合に、待機位置P2から透視撮影位置Q1へC形アームを移動させたいときは、予め登録された経路R1ないしR4を選択すれば、待機位置P2から透視撮影位置Q1へC形アームを移動させることができる。また、(b)に示すルームレイアウトの場合に、待機位置P3から透視撮影位置Q7へC形アームを移動させたいときは、経路R11ないしR13を選択すれば、待機位置P3から透視撮影位置Q7へC形アームを移動させることができる。
【解決手段】待機位置と透視撮影位置を結ぶ予め定められた複数の経路の中から1の経路を選択する。(a)に示すルームレイアウトの場合に、待機位置P2から透視撮影位置Q1へC形アームを移動させたいときは、予め登録された経路R1ないしR4を選択すれば、待機位置P2から透視撮影位置Q1へC形アームを移動させることができる。また、(b)に示すルームレイアウトの場合に、待機位置P3から透視撮影位置Q7へC形アームを移動させたいときは、経路R11ないしR13を選択すれば、待機位置P3から透視撮影位置Q7へC形アームを移動させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、X線透視撮影装置に係り、特に、X線管とX線検出器とを対向支持する支持手段を透視撮影位置および待機位置との間で移動させる技術に関する。
【背景技術】
【0002】
従来、この種の装置として、X線管を懸垂保持する支持手段が天井面に対してx方向およびy方向に水平移動し、任意の停止位置で停止するものがある(例えば、特許文献1参照)。具体的には、この支持手段は、天井面に固定された固定レールと、この固定レールに取り付けられた可動レールに沿って天井面をx方向およびy方向方向に水平移動する。そして、支持手段を停止させる際は、各レールの所望の位置に配設されたセンサが起動すると、装置に取り付けられた制動機構が支持手段を停止させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−245726号公報(第10頁、図1,2,3)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような構成を有する従来例の場合には、次のような問題がある。
すなわち、従来の装置は、透視撮影中に支持手段が位置する透視撮影位置と透視撮影しない待機時間中に支持手段が位置する待機位置との間を移動させる際の経路が装置によって固定されている。すなわち、従来装置では、待機位置および透視撮影位置を結ぶ経路が1つしか設定されていない。その結果、ユーザーは、経路上に検査または治療用などで使用する機材が配設されると、待機位置から透視撮影位置まで装置を移動させることができなくなる。また、ある検査または治療において経路上を除いた位置に機材を配設したとしても、別の検査または治療においては検査室のルームレイアウトが変更されて、機材の位置も変更されることがあり、変更前の経路上に機材が位置してしまうことがある。また、検査室の広さ、機材の数、機材の種類、検査内容または治療内容などのユーザーの要望は、各々異なるのが常である。そうすると、装置を透視撮影位置と待機位置との間を移動させることができなくなるという問題があった。
【0005】
この発明は、このような事情に鑑みてなされたものであって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる汎用性の高いX線透視撮影装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、このような目的を達成するために、次のような構成をとる。
すなわち、請求項1に記載の発明は、被検体をX線透視撮影するX線透視撮影装置であって、X線管とX線検出器とを対向させて支持する支持手段と、前記支持手段をベッドに仰臥した被検体に対して回動および平行移動させる駆動手段と、透視撮影中に前記支持手段が位置する透視撮影位置と透視撮影しない待機時間中に前記支持手段が位置する待機位置とを結び、予め定められた複数の経路の中から1の経路を選択する選択手段と、前記選択手段によって選択された経路に沿って前記支持手段を回動および平行移動させる駆動制御手段を備えていることを特徴とするものである。
【0007】
[作用・効果]請求項1に記載の発明によれば、支持手段は、X線管とX線検出器とを対向させて支持し、駆動手段は、ベッドに仰臥した被検体に対して支持手段を回動および平行移動させる。駆動制御手段は、透視撮影中に支持手段が位置する透視撮影位置と透視撮影しない待機時間中に支持手段が位置する待機位置とを結び、予め定められた複数の経路の中から1の経路を選択する選択手段によって選択された経路に沿って支持手段を回動および平行移動させる。これにより、X線透視撮影用の検査室内において支持手段を回動および平行移動させる際に、予め定められた複数の経路の中から1の経路を選択し、その選択された経路に沿って支持手段を回動および平行移動させることがでる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、その検査室のルームレイアウトに合わせて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。また、検査室の広さ、機材の数、機材の種類、検査内容または治療内容など様々なユーザーの好みに対応できる汎用性の高いX線透視撮影装置を提供することができるので、ユーザーの要望にも応えることができる。
【0008】
また、この発明において、予め定められた複数の経路は、進行方向と支持手段の姿勢とが対応付けられた経路であることことが好ましい(請求項2記載の発明)。これにより、予め定められた複数の経路は、進行方向と支持手段の姿勢とが対応付けられているので、各ルームレイアウトごとにX線透視撮影による更に効率的な検査または治療を行うことができる。
【0009】
また、この発明において、前記透視撮影位置と前記待機位置とを結ぶ経路上に障害物が配置されている場合に、前記支持手段の姿勢は障害物との接触を回避するものであり、前記経路は前記障害物を迂回するものであることが好ましい(請求項3記載の発明)。これにより、透視撮影位置と待機位置とを結ぶ経路上に機材等の障害物が配置されている場合に、障害物との接触を回避する姿勢で支持手段を回動し、障害物を迂回する経路に沿って支持手段を平行移動させることができる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、検査室に配置される機材等の障害物の位置に応じて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0010】
また、この発明において、予め複数の前記経路を登録する登録手段を備え、前記選択手段は、前記登録手段によって予め登録された複数の経路の中から1の経路を選択することが好ましい(請求項4記載の発明)。これにより、ユーザー又は装置の製造業者が予め複数の経路を登録することによって、ユーザー又は装置の製造業者は、予め登録された複数の経路の中から1の経路を選択することができる。したがって、ユーザー又は装置の製造業者は、検査室の状況に応じて登録された複数の経路の中から所望の経路を選択することによって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0011】
また、この発明において、前記透視撮影位置および前記待機位置ごとに複数の経路が定められていることが好ましい(請求項5記載の発明)。これにより、複数の経路が透視撮影位置および待機位置ごとに定まっているので、透視撮影位置および待機位置の位置に合わせた可能な限り最短の経路に沿って支持手段を回動および平行移動させることができる。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができる。
【0012】
また、この発明において、複数の前記透視撮影位置の中から任意の位置を経由ポイントとして設定し、前記経由ポイントおよび前記待機位置ごとに複数の経路が定められていることが好ましい(請求項6記載の発明)。これにより、複数の透視撮影位置の中から任意の位置が経由ポイントとして定められ、経由ポイントおよび待機位置ごとに複数の経路が定められているので、透視撮影位置の数に対して設定される経路の数が少なくて済む。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができるとともに、経路の選択数を減らすことによって、操作し易くなる。
【0013】
また、この発明において、前記支持手段の姿勢は、前記透視撮影位置が前記ベッドの長手側および短手側のいずれであるかに合わせて変化されることが好ましい(請求項7記載の発明)。これにより、透視撮影位置がベッドの長手側および短手側のいずれであるかに合わせて支持手段の姿勢を変化させることによって、透視撮影位置がベッドの長手側および短手側のいずれである場合にも、透視撮影を開始し易い位置に合わせることができる。
【0014】
また、この発明において、前記支持手段の姿勢は、前記支持手段と前記X線管と前記X線検出器とを結んで形成される面を前記支持手段の進行方向に対して平行とすることが好ましい(請求項8記載の発明)。これにより、支持手段の姿勢が支持手段とX線管とX線検出器とを結んで形成される面を前記支持手段の進行方向に対して平行となることによって、支持手段とX線管とX線検出器とを結んで形成される面が支持手段の進行方向に対して直角となるときに比べて、進行方向に面する支持手段の面積が小さくなる。したがって、支持手段を細い経路に通すことができるので、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0015】
また、この発明において、複数の前記経路を各経路ごとに表示手段に表示させる表示制御手段を備えることが好ましい(請求項9記載の発明)。これにより、ユーザーは、複数の前記経路を各経路ごとに表示手段で目視により確認できるので、X線透視撮影による効率的な検査または治療を行うことができる。
【発明の効果】
【0016】
この発明に係るX線透視撮影装置によれば、透視撮影位置と待機位置とを結び、進行方向と支持手段の姿勢とが対応付けられた経路として予め定められた複数の経路の中から1の経路を選択手段が選択し、駆動制御手段がこの経路に沿って支持手段を駆動させるので、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、その検査室のルームレイアウトに合わせて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【図面の簡単な説明】
【0017】
【図1】実施例1のX線透視撮影装置の全体構成を示す概略図である。
【図2】(a)は実施例1の装置を側面から見た側面図であり、(b)は実施例1の装置を正面から見た正面図である。
【図3】実施例1の装置の制御ブロック図である。
【図4】C形アームの経路の登録処理を説明するフローチャートである。
【図5】(a)は透視撮影位置と待機位置とを結ぶ経路を説明する模式図であり、(b)は別の経路を説明する模式図である。
【図6】(a)は透視撮影位置と待機位置とを結ぶ経路におけるC形アームの姿勢を説明する模式図であり、(b)は別の経路におけるC形アームの姿勢を説明する模式図である。
【図7】実施例1の装置の動作を説明するフローチャートである。
【図8】実施例1の装置の経路を表示する表示モニタの模式図である。
【図9】(a)は実施例2の装置において経由ポイントを介して透視撮影位置と待機位置とを結ぶ経路を説明する模式図であり、(b)は経由ポイントと透視撮影位置と待機位置との関係を説明する模式図である。
【図10】実施例2の装置の動作を説明するフローチャートである。
【実施例1】
【0018】
以下、図面を参照してこの発明の実施例1を説明する。
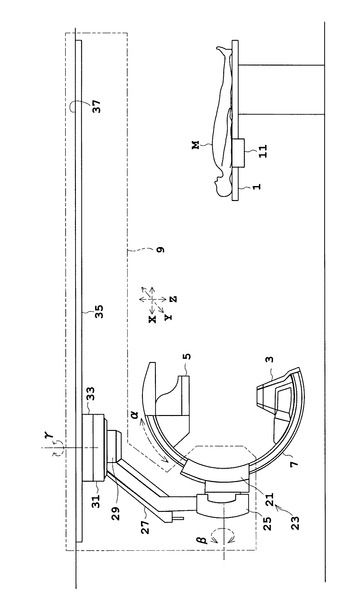
図1は、実施例1に係るX線透視撮影装置の全体構成を示す概略図であり、図2(a)は、実施例1の装置を側面から見た側面図であり、図2(b)は実施例1の装置を正面から見た正面図である。
【0019】
実施例1に係るX線透視撮影装置は、図1に示すように、ベッド1に仰向けに載置された被検体Mを挟んでX線管3とフラットパネル型二次元X線検出器5(以下、FPD5)とが対向配置されたC形アーム7と、C形アーム7を直交する3軸回りに回動させるとともに平行移動させるC形アーム駆動機構部9とを備えている。また、C形アーム駆動機構部9に駆動指令等を与える操作盤11がベッド1の側面に配設されている。なお、C形アーム7は本発明における支持手段に相当し、C形アーム駆動機構部9は本発明の駆動手段に相当する。
【0020】
C形アーム駆動機構部9は、C形アーム7がC形アーム保持部23に対してスライドする方向(水平なY軸周りの方向)であるα方向に回動させるスライド機構部21と、スライド機構部21を含むC形アーム保持部23と、C形アーム保持部23を支持するとともにC形アーム保持部23の支柱部27に対しての回転方向(Y軸に対して直交するX軸周りの方向)であるβ方向に回動させる回動機構部25と、回動機構部25の上端に配設される支柱部27と、支柱部27の上端に配設されて支柱部27を鉛直軸(Z軸)方向であるγ方向に回動させる旋回機構部29と、旋回機構部29が取り付けられた可動台31と、可動台31をy方向に平行移動させる可動レール33と、可動レール33をx方向に平行移動させる固定レール35とで構成されている。固定レール35は天井面37に敷設されている。なお、図示の都合上、図1では、y方向を示す矢印はx方向を示す矢印に対して斜め方向を向いているが、y方向はx方向に直交する方向である。
【0021】
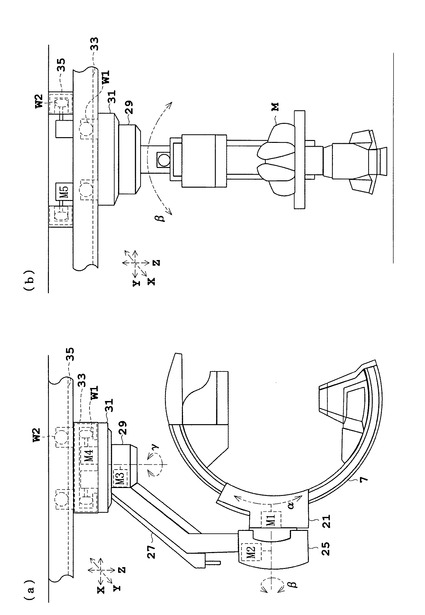
図2(a)に示すように、スライド機構部21の内部にはモータM1が配設され、モータM1を正逆方向に駆動することによってC形アーム7をα方向に回動させる。回動機構部25の内部にはモータM2が配設され、モータM2を正逆方向に駆動することによってC形アーム保持部23をβ方向に回動させる。旋回機構部29の内部にはモータM3が配設され、モータM3を駆動することによって支柱部27をγ方向に回動させる。可動レール33に面する可動台31の上面にはモータM4が配設され、モータM4の出力軸に取り付けられた車輪W1は、可動レール33の案内面に配設されている。モータM4を正逆方向に駆動することによって、可動台31はy方向に平行移動する。図2(b)に示すように、固定レール35に面する可動レール33の上面にはモータM5が配設され、モータM5の出力軸に取り付けられた車輪W2は、固定レール35の案内面に配設されている。モータM5を正逆方向に駆動することによって、可動レール33はx方向に平行移動する。
【0022】
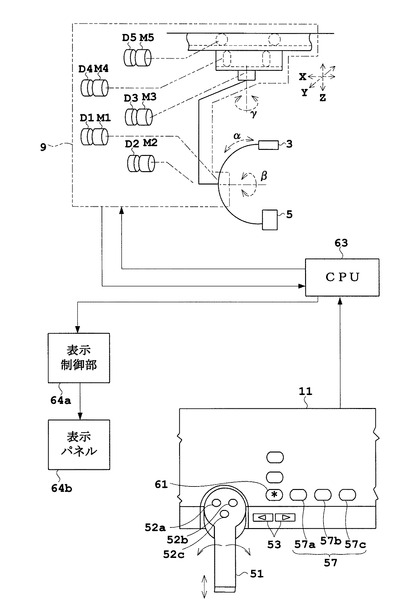
図3を参照して、C形アーム駆動機構部9の駆動制御について説明する。なお、図3は、実施例1の装置の操作盤の概略構成図を含む実施例1の装置の制御ブロック図である。
【0023】
操作盤11は、C形アーム7のα方向およびβ方向の回動およびxy方向の平行移動を入力する操作グリップ51と、C形アーム7のγ方向の回動を入力する旋回スイッチ53と、C形アーム7のxy方向の駆動量および進行方向とαβγ方向の姿勢とをC形アーム7の経路として記憶する複数個のメモリスイッチ57(例えば、メモリスイッチ57aないし57c)と、メモリスイッチ57aないし57cに記憶された経路に沿ってC形アーム7を回動および平行移動させるメモリ実行スイッチ61とを備えている。操作グリップ51には、スライド用スイッチ52aと回転用スイッチ52bと平行移動用スイッチ52cが配設されている。スライド用スイッチ52aまたは回転用スイッチ52bを押下しながらC形アーム7の設置位置に応じて操作グリップ51を上下又は回転させることにより、C形アーム7はα方向またはβ方向に回動する。また、平行移動用スイッチ52cを押下しながら操作グリップ51を上下又は回転させることにより、C形アーム7はx方向又はy方向に平行移動する。なお、メモリスイッチ57aないし57cはこの発明の選択手段に相当する。
【0024】
CPU63は、メモリスイッチ57aないし57cからの経路情報を入力して、C形アーム駆動機構部9によるC形アーム7のαβγ方向への回動およびxy方向への平行移動を制御する。また、表示制御部64aは、FPD5によって取得された被検体Mの画像情報を表示パネル64bに表示させる。また、表示制御部64aは、C形アーム7の経路を表示パネル64bに表示させることも可能である。なお、CPU63は、この発明の駆動制御手段に相当し、表示パネル64bと表示制御部64aは、この発明の表示手段と表示制御手段に相当する。
【0025】
α方向又はβ方向の回動制御について説明する。操作グリップ51の操作によってC形アーム7を回動させる場合、CPU63は、操作グリップ51の操作方向および操作量に応じてモータM1又はモータM2の回転方向および回転角度を算出し、目的回動情報としてモータM1又はモータM2に出力する。CPU63は、モータM1又はモータM2に取り付けられたロータリーエンコーダD1又はD2によって検出される実回動情報を入力し、実回動情報が目的回動情報と一致するように制御する。経路情報に基づいてC形アーム7を回動させる場合は、操作グリップ51を介さずに、α方向およびβ方向の経路情報に従ってモータM1およびモータM2を駆動する。
【0026】
γ方向の回動制御について説明する。左右の旋回スイッチ53のいずれが押下されたか、および旋回スイッチ53が押下された時間に応じてモータM3の回転方向および回転角度を算出し、目的回動情報としてモータM3に出力する。CPU63は、モータM3に取り付けられたロータリーエンコーダD3によって検出される実回動情報を入力し、実回動情報が目的回動情報と一致するように制御する。なお、経路情報に基づいてC形アーム7を回動させる場合は、旋回スイッチ53を介さずに、γ方向の経路情報に従ってモータM3を駆動する。
【0027】
x方向およびy方向の平行移動制御について説明する。平行移動用スイッチ52cが押下された状態での操作グリップ51の操作方向および操作時間に応じてモータM4,M5の回転方向および回転角度を算出し、目的回動情報としてモータM4,M5に出力する。CPU63は、モータM4,M5に取り付けられたロータリーエンコーダD4,D5によって検出される実回動情報を入力し、実回動情報が目的回動情報と一致するように制御する。なお、経路情報に基づいてC形アーム7を平行移動させる場合は、操作グリップ51を介さずに、xy方向の経路情報に従ってモータM4.M5を駆動する。
【0028】
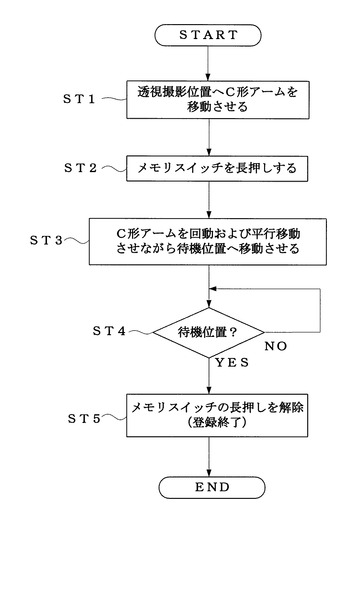
図4を参照して、C形アーム7を回動および平行移動させる経路をメモリスイッチ57に登録させる処理について説明する。なお、図4は、本実施例装置の経路の登録処理を説明するフローチャートである。
【0029】
ここで、経路とは、被検体Mを透視撮影中にC形アーム7が位置する透視撮影位置と被検体Mを透視撮影しない待機時間中にC形アーム7が位置する待機位置(一例として待機位置P2と呼ぶ)との間をC形アーム7が回動および平行移動する際のルートである。経路には、C形アーム7の進行方向と各位置におけるC形アーム7の姿勢が含まれる。なお、経路の登録処理は、装置の製造者によって行われることもあり、装置のユーザーによって行われることもある。装置の製造業者によって経路が登録される場合は、予め各メモリスイッチ57aないし57cに経路情報が記憶されている。ここでは、装置のユーザーが検査室のルームレイアウトごとに経路を登録する場合を例に挙げて説明する。
【0030】
ユーザーは、被検体Mを透視撮影中にC形アーム7が位置する透視撮影領域Q内の透視撮影位置(一例としてQ1と呼ぶ)にC形アーム7を移動させる(ステップST1)。具体的には、操作盤11の操作グリップ51と旋回スイッチ53と平行移動スイッチ55とを操作して、C形アーム7のxy方向およびαβγ方向の位置を決める。
【0031】
メモリスイッチ57のうち57a,57b,57cのいずれかのスイッチを長押する(ステップST2)。メモリスイッチ57の長押しによって経路の登録処理が開始される。
【0032】
ユーザーは、操作グリップ51と旋回スイッチ53と平行移動スイッチ55とを操作して、透視撮影位置Q1から待機位置P2までC形アーム7を回動および平行移動させる(ステップST3)。
【0033】
ユーザーは、C形アーム7が待機位置P2に到着した場合、操作盤11による操作を終了し、C形アーム7の回動および平行移動を停止する(ステップST4)。C形アーム7が待機位置P2に到着していない場合、待機位置P2に到着するまでC形アーム7を回動および平行移動させる。
【0034】
ユーザーは、C形アーム7の回動および平行移動を停止させると、メモリスイッチ57の長押しを解除する(ステップST5)。メモリスイッチ57の長押し解除によって経路の登録処理が終了され、C形アーム7を回動および平行移動させる際の、モータM1ないしM5の回転方向および回転角度がC形アーム7の経路を示す経路情報として選択されたメモリスイッチ57aないし57cのいずれかに登録される。このとき、C形アーム7のαβγの回動方向は、経路におけるC形アーム7の姿勢に相当し、C形アーム7のxyの平行移動方向は、経路における進行方向に相当する。なお、メモリスイッチ57の長押しによる経路の登録機能は、この発明の登録手段に相当する。
【0035】
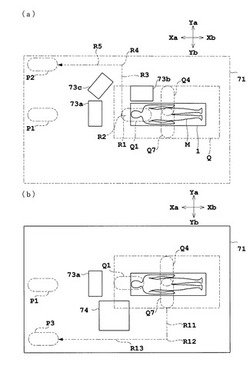
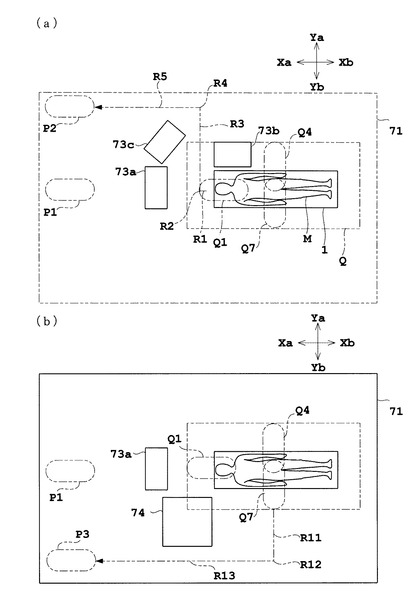
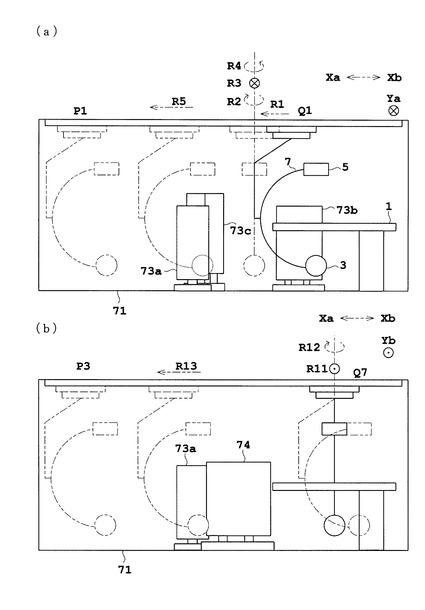
図5および図6を参照して、検査室71におけるC形アーム7の経路と、検査室71のルームレイアウトを変更するとともに透視撮影位置を変更した場合におけるC形アーム7の別の経路とについて説明する。なお、図5(a)は、実施例1の装置の経路を説明する模式図であり、図5(b)は、実施例1の装置の別の経路を説明する模式図である。図6(a)は、実施例1の装置が経路上で採る姿勢を説明する模式図であり、図6(b)は、実施例1の装置が別の経路上で採る姿勢を説明する模式図である。
【0036】
なお、実施例1の装置が配設される検査室71を4つの方向で表す。図5(a)に示すように、ベッド1の長手方向で被検体Mの脚部から頭部へ向かう方向をXa方向とし、その反対方向をXbとする。また、ベッド1の短手方向でベッド1に仰向けに載置された被検体Mの右手から左手へ向かう方向をYaとし、その反対方向をYbとする。
【0037】
図5(a)に示すように、C形アーム7は、被検体Mの頭部に対してXa方向寄りに設定されている透視撮影位置Q1に配設されており、X線管3とFPD5が被検体Mの頭部付近を挟んだ姿勢で配設されている。透視撮影位置Q1と最寄りの待機位置P1とを結ぶ直線上には機材73aが配設されているので、C形アーム7を透視撮影位置Q1からXa方向に移動させることはできない。また、C形アーム7をそのままの姿勢でYa方向に移動させると、機材73bに接触するので、透視撮影位置Q1からそのままの姿勢でYa方向に移動させることもできない。そこで、C形アーム7をXa方向に少し平行移動させて(経路R1)、図6(a)に示すように、透視撮影位置Q1においてC形アーム7のγ方向の姿勢を時計回りに90度回転させ(経路R2)、Ya方向に移動させる(経路R3)。C形アーム7は検査室71のYa方向側の壁面付近でXa方向に進路を変えるが、そのままの姿勢では機材73cに接触する。そこで、図6(a)に示すように、C形アーム7のγ方向の姿勢を反時計回りに90度回転させ(経路R4)、Xa方向に移動させる(経路R5)。C形アーム7は、経路R5上にある待機位置P2で停止される。この経路R1ないしR5に関する情報は、図3に示すメモリスイッチ57aに登録される。なお、機材73a,73b,73cはこの発明における障害物に相当する。
【0038】
なお、透視撮影位置がQ1ではなく、被検体Mの左手側に近い透視撮影位置Q5や被検体Mの右手側に近い透視撮影位置Q7である場合、透視撮影位置Q5又はQ7に位置するC形アーム7は透視撮影位置Q1に移動してから、透視撮影位置Q1から待機位置P2まで前述の経路に沿って移動する。このとき、透視撮影位置Q1は、経由ポイントとして機能する。
【0039】
次に、検査室71のルームレイアウトおよび透視撮影位置を変更した場合について説明する。図5(b)に示すように、C形アーム7は、被検体Mの右脚部に対してYb方向寄りに設定されている透視撮影位置Q7に配設されており、X線管3とFPD5が被検体Mの右脚部付近を挟んだ姿勢で配設されている。C形アーム7をYb方向に移動させ、検査室71のYb方向側の壁面に沿ってそのままの姿勢でXa方向に移動させようとすると、機材74に接触する。そこで、図6(b)に示すように、透視撮影位置Q7からC形アーム7をYb方向に移動させ(経路R11)、Yb方向側の壁面付近でC形アーム7のγ方向の姿勢を時計回りに90度回転させて(経路R12)、機材74の脇を通ってXa方向に移動させる(経路R13)。そして、C形アーム7を待機位置P3で停止させる。この経路R11ないしR13に関する情報は、図3に示すメモリスイッチ57cに登録される。
【0040】
なお、透視撮影位置がQ7ではなく透視撮影位置Q1又はQ5である場合、透視撮影位置Q1又はQ5に位置するC形アーム7は透視撮影位置Q7に移動してから、透視撮影位置Q7から待機位置P3まで前述の経路に沿って移動する。このとき、透視撮影位置Q7は、経由ポイントとして機能する。
【0041】
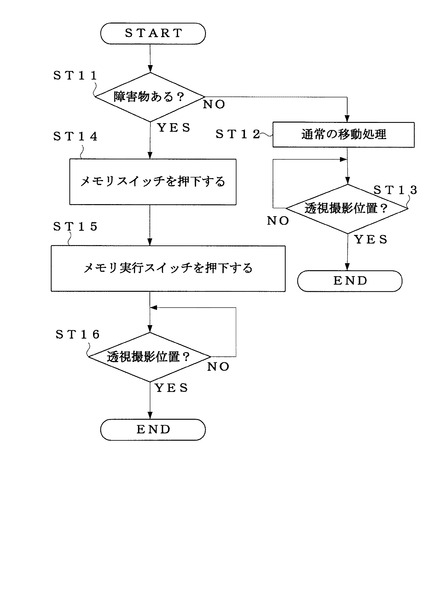
図7を参照して、登録された経路に沿って待機位置から透視撮影位置までC形アーム7を回動および平行移動させる駆動制御について説明する。待機位置と透視撮影位置と検査室71のルームレイアウトは、図5および図6を参照する。なお、図7は、実施例1の装置の動作を説明するフローチャートである。
【0042】
待機位置と透視撮影位置とを結ぶ直線上に機材があるか否か確認する(ステップST11)。仮に、待機位置P1と透視撮影位置Q1とを結ぶ直線上に機材73aがない場合、C形アーム7をそのまま待機位置P1から透視撮影位置Q1まで移動させ(ステップST12)、透視撮影位置Q1でC形アーム7を停止させる(ステップST13)。
【0043】
図5(a)の検査室71のルームレイアウトにおいて、待機位置がP2で透視撮影位置がQ1である場合、機材73aないし73cが配設されているので、これらの機材を避ける図3に示すメモリスイッチ57aを選択して押下する(ステップST14)。メモリ実行スイッチ61を押下して、メモリスイッチ57aに登録された経路R1ないしR5をR5から順番に実行する(ステップST15)。具体的には、待機位置P2で待機しているC形アーム7は、経路R5に沿ってXb方向に平行移動され、経路R4の地点でγ方向の姿勢を時計回りに90度回動され、経路R3に沿ってYb方向に平行移動され、経路R2の地点でγ方向の姿勢を反時計回りに90度回動され、経路R1に沿ってXb方向に平行移動され、透視撮影領域Q1で停止される(ステップST16)。
【0044】
図5(b)の検査室71のルームレイアウトにおいて待機位置がP3で透視撮影位置がQ7である場合は、機材73aおよび74が配設されているので、これらの機材を避ける図3に示すメモリスイッチ57cを選択して押下する(ステップST14)。メモリスイッチ57cおよびメモリ実行スイッチ61を押下して、メモリスイッチ57cに登録された経路R11ないしR13をR13から順番に実行する(ステップST15)。具体的には、待機位置P3で待機しているC形アーム7は、経路R13に沿ってXb方向に平行移動され、経路R12の地点でγ方向の反時計回りに90度回動され、経路R11に沿ってYa方向に平行移動され、透視撮影位置Q3で停止される(ステップST16)。
【0045】
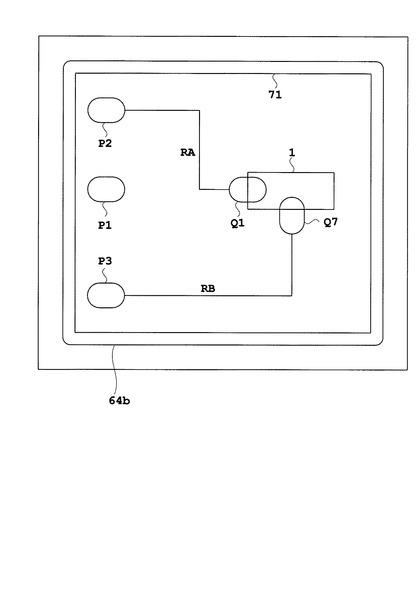
図8を参照して、上述した経路を表示モニタ64bに表示させる構成について説明する。なお、図8は、実施例1の装置の経路を表示する表示モニタの模式図である。
【0046】
表示モニタ64bには、検査室71を示す枠、ベッド1、待機位置P1ないしP3、透視撮影位置Q1,Q7、および経路を示す情報が表示されている。上述の経路R1ないしR5は、待機位置P2と透視撮影位置Q1とを結ぶ経路RAとして表示パネル64b上に表示されている。また、上述の経路R11ないしR13は、待機位置P3と透視撮影位置Q7とを結ぶ経路RBとして表示されている。表示パネル64b上の経路RAは、メモリスイッチ57aに記憶されている経路に対応し、経路RBはメモリスイッチ57cに記憶されている経路に対応する。
【0047】
実施例1記載の発明によれば、検査室71内においてC形アーム7を回動および平行移動させる際に、透視撮影位置と待機位置とを結ぶ予め定められた複数の経路、例えば経路R1ないしR5と経路R11ないし13の中から1の経路を選択し、その選択された経路に沿ってC形アーム7を回動および平行移動させることがでるので、図5(a)(b)に示すような検査室71の状況に応じて経路を選択できる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、その検査室のルームレイアウトに合わせて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。また、検査室の広さ、機材の数、機材の種類、検査内容または治療内容など様々なユーザーの好みに対応できる汎用性の高いX線透視撮影装置を提供することができるので、ユーザーの要望にも応えることができる。
【0048】
実施例1記載の発明によれば、例えば図5(a)に示すように検査室71内に機材73aないし73cが配置されている場合に、機材73bおよび73cとの接触を回避する経路R2およびR4に示す姿勢でC形アーム7を回動し、機材73aないし73cを迂回する経路R1,R3,R5に沿ってC形アーム7を平行移動させることができる。また、例えば図5(b)に示すように検査室71内に機材73aおよび74が配設されている場合に、機材73aおよび74との接触を回避する経路R12に示す姿勢でC形アーム7を回動し、機材73aおよび74を迂回する経路R11およびR13に沿って、C形アーム7を平行移動させることができる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、検査室に配置される機材等の障害物の位置に応じて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0049】
実施例1記載の発明によれば、検査室71のルームレイアウトに応じてユーザーが経路R1ないしR5をメモリスイッチ57aに登録し、経路R11ないしR13をメモリスイッチ57cに登録することによって、ユーザーは、予め登録された経路R1ないしR5または経路R11ないしR13のうちいずれかの経路を選択することができる。したがって、ユーザー又は装置の製造業者は、検査室の状況に応じて登録された複数の経路の中から所望の経路を選択することによって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0050】
実施例1記載の発明によれば、透視撮影位置Q1および待機位置P2の場合の経路をR1ないしR5と定め、透視撮影位置Q7および待機位置P3の場合の経路をP11ないしR13と定めているので、透視撮影位置および待機位置の位置に合わせた可能な限り最短の経路に沿ってC形アーム7を回動および平行移動させることができる。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができる。
【0051】
実施例1記載の発明によれば、透視撮影位置がベッド1の短手側の透視撮影位置Q1である場合にはC形アーム7のγ方向の姿勢を経路R2およびR4の地点で90度ずつ変化させ、透視撮影位置がベッド1の長手側の透視撮影位置Q7である場合にはC形アーム7のγ方向の姿勢をR12の地点で90度変化させることによって、透視撮影位置がベッド1の長手側および短手側のいずれである場合にも、透視撮影を開始し易い位置に合わせることができる。
【0052】
実施例1記載の発明によれば、C形アーム7の姿勢は、図5(a)に示すルームレイアウトにおいては経路R1,R3,R5や、図5(b)に示すルームレイアウトにおいては経路R11,R13に示すように、C形アーム7とX線管3とFPD5とを結んで形成される面をC形アーム7の進行方向に対して平行とする。したがって、C形アーム7が進行中に通る面積が小さくなる。したがって、C形アーム7を細い経路に通すことができるので、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0053】
実施例1記載の発明によれば、メモリスイッチ57aおよび57cに記憶された経路R1ないしR5、R11ないしR13を経路RAおよびRBとして表示パネル64bに表示させる表示制御部64aを備える。したがって、ユーザーは、メモリスイッチ57aおよび57cに対応する経路RAおよびRBを表示パネル64bで目視により確認できるので、X線透視撮影による効率的な検査または治療を行うことができる。
【実施例2】
【0054】
次に、図面を参照してこの発明の実施例2を説明する。
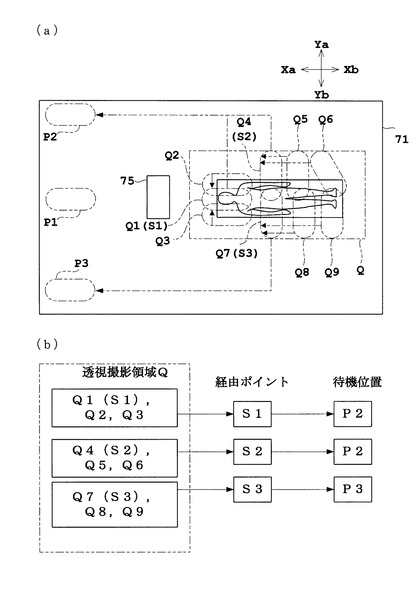
実施例2に係るX線透視撮影装置は、図9に示すように、複数の透視撮影位置に応じて複数の経由ポイントが設定されている点において実施例1と異なる。その他の構成については実施例1と同様のものは、重複記載を避けるため説明を省略する。なお、図9(a)は経由ポイントを介して透視撮影位置と待機位置とを結ぶ経路を説明する模式図であり、図9(b)は経由ポイントと透視撮影位置と待機位置との関係を説明する模式図である。
【0055】
図9(a)に示すように、ベッド1の周囲で透視撮影可能な領域である透視撮影領域内には、被検体Mの頭部に近い透視撮影位置Q1,Q2,Q3と、被検体Mの左手側に近い透視撮影位置Q4,Q5,Q6と、被検体Mの右手側に近い透視撮影位置Q7,Q8,Q9とが設けられている。透視撮影位置Q1は、ベッド1の短手側の中心部に位置し、経由ポイントS1として設定されている。透視撮影位置Q4は、ベッド1の長手側の中心部に位置し、経由ポイントS2として設定され、透視撮影位置Q8は、ベッド1の長手側で経由ポイントS2の対向位置に経由ポイントS3として設定されている。経由ポイントS1ないしS3におけるC形アームの姿勢は、X線管3とFPD5とが鉛直軸上に並ぶ姿勢である。
【0056】
設定された経由ポイントS1,S2,S3および待機位置P1,P2,P3ごとに検査室71のルームレイアウトに応じた経路を登録する。検査室71には、透視撮影位置Q1と最寄りの待機位置P1とを結ぶ直線上に機材75が配設されているので、経由ポイントS1から機材75を迂回して待機位置P2と結ばれる経路が登録される。また、経由ポイントS2からXa方向に直線上の経路にも機材75が配設されているので、経由ポイントS2から機材75を迂回して待機位置P2と結ばれる経路が登録される。また、経由ポイントS3からXa方向に直線状の経路にも機材75が配設されているので、経由ポイントS3から機材75を迂回して待機位置P3と結ばれる経路が登録される。各経路の登録については、上述の説明と同様であるので、重複記載を避けるため説明を省略する。
【0057】
透視撮影位置Q1ないしQ9と経由ポイントS1ないしS3と待機位置P1ないしP3との関係について、図9(b)を参照して説明する。透視撮影位置がQ1ないしQ3である場合、C形アーム7は最寄りの経由ポイントS1を経由して、機材75を迂回する経路に沿って待機位置P2まで移動する。この経由ポイントS1を経由する経路は、図3に示すメモリスイッチ57aに登録されている。透視撮影位置がQ4ないしQ6である場合、C形アーム7は最寄りの経由ポイントS2を経由して、機材75を迂回する経路に沿って待機位置P2まで移動する。この経由ポイントS2を経由する経路は、図3に示すメモリスイッチ57bに登録されている。透視撮影位置がQ7ないしQ9である場合、C形アーム7は最寄りの経由ポイントS3を経由して、機材75を迂回する経路に沿って待機位置P3まで移動する。この経由ポイントS3を経由する経路は、図3に示すメモリスイッチ57cに登録されている。なお、透視撮影位置Q1,Q4,Q7は経由ポイントS1,S2,S3とそれぞれ同じ位置なので、実質的な平行移動距離は0である。
【0058】
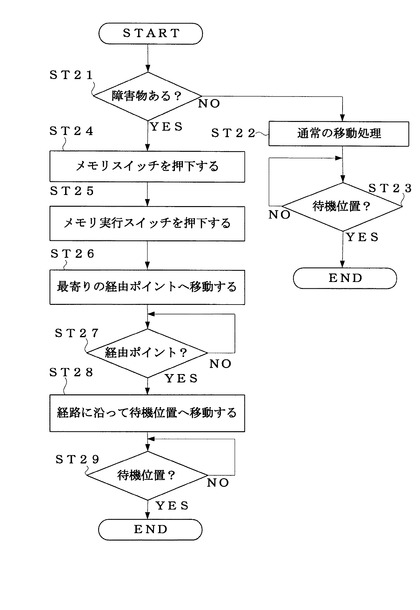
次に、図10を参照して、登録された経路に沿って経由ポイントを経由して透視撮影位置から待機位置までC形アーム7を回動および平行移動させる駆動制御について説明する。待機位置と透視撮影位置と検査室71のルームレイアウトは、図9を参照する。なお、図10は、実施例2の装置の動作を説明するフローチャートである。
【0059】
経由ポイントS1ないしS3からXa方向に直線上に機材があるか否か確認する(ステップST21)。仮に、機材75がない場合、透視撮影位置Q1ないしQ9から各経由ポイントS1ないしS3を介して待機位置P1ないしP3まで直線的にC形アーム7を移動させ(ステップST22)、C形アーム7を待機位置P1ないしP3で停止させる(ステップST23)。
【0060】
図9に示すように、経由ポイントS1ないしS3からXa方向に直線上に機材75がある場合について説明する。C形アーム7を透視撮影位置Q5から待機位置P2まで移動する際には、経由ポイントS2を経由するので、ユーザーは、メモリスイッチ57bを選択し(ステップST24)、メモリ実行スイッチ61を押下して、メモリスイッチ57bに記憶された経路情報を実行する(ステップST25)。
【0061】
メモリスイッチ57bとメモリ実行スイッチ61を押下すると、C形アーム7は、透視撮影位置Q5から最寄りの経由ポイントS2に移動する(ステップST26)。CPU63は、C形アーム7が経由ポイントS2に到達するまでC形アーム7を移動させ続ける(ステップST27)。C形アーム7が経由ポイントS2に達すると、メモリスイッチ57bに登録された経路に沿ってC形アーム7を回動および平行移動される(ステップST28)。待機位置P1ないしP3に到達するまでC形アーム7を回動および平行移動させ続け、待機位置P1ないしP3に到達すればC形アーム7の回動および平行移動を停止させる(ステップST29)。
【0062】
図9において、C形アーム7を透視撮影位置Q6から待機位置P2まで移動させる際も同様に、経由ポイントS2を経由するので、ユーザーは、メモリスイッチ57bを押下し、メモリ実行スイッチ61を押下する。これにより、C形アーム7は透視撮影位置Q9から経由ポイントS2を経由した後、上記と同様にメモリスイッチ57bに登録された経路に沿って経由ポイントS2から待機位置P2まで移動する。なお、C形アームが経由ポイントS2と同じ透視撮影位置Q4にある場合は、透視撮影位置Q4から経由ポイントS2への移動はなく、メモリスイッチ57bに登録された経路に沿って経由ポイントS2から待機位置P2まで移動する動作を開始する。
【0063】
実施例2記載の発明によれば、複数の透視撮影位置Q1ないしQ9の中から近接する透視撮影位置Q1ないしQ3、Q4ないしQ5、Q6ないしQ9ごとに、最寄りの位置S1ないしS3が経由ポイントして定められる。経由ポイントS1およびS2と待機位置P2とを結ぶ経路と、経由ポイントS3および待機位置P3を結ぶ経路が定められ、各経由ポイントおよび待機位置ごとに複数の経路が定められているので、透視撮影位置の数に対して設定される経路の数が少なくて済む。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができるとともに、経路の選択数を減らすことによって、操作し易くなる。
【0064】
この発明は、上記実施形態に限られることはなく、下記のように変形実施することができる。
【0065】
(1)上述した各実施例では、C形アーム7の経路は、進行方向とC形アーム7の姿勢とが対応付けられていると述べたが、進行方向と姿勢とが対応付けられていない経路であってもよい。この場合、C形アーム7の経路は、C形アーム7の進行方向を定めるものとなる。
【0066】
(2)上述した各実施例では、待機位置をP1ないしP3とし、透視撮影位置をQ1ないしQ9のいずれかとしたが、これに限定されず、検査室71のルームレイアウトおよび透視撮影の部位や方向等によって設定できる。また、待機位置を特定の位置に設定せずに、検査室71のXa方向の壁側のように大まかに設定しても良い。
【0067】
(3)上述した各実施例では、進行方向とC形アーム7の姿勢とが対応付けられた経路として、経路R2,R4,R12に示すようなγ方向の姿勢を挙げたが、これに限定されず、α方向やβ方向の姿勢であってもよい。例えば、X線管3とFPD5とが鉛直軸上に位置する姿勢において、α方向またはβ方向に90度回動させれば、X線管3とFPD5とを結ぶ水平軸から床面までの間にスペースが生まれる。このスペースに収まるような高さの機材であれば、C形アームをα方向またはβ方向に90度回動させた姿勢で経路上の進行方向と対応付けてもよい。
【0068】
(4)上述した各実施例では、予め定められた複数の経路として、経路R1ないしR4とR11ないしR13とを挙げたが、これに限定されず、複数の透視撮影位置および複数の待機位置ごとにさらに複数の経路を定めても良い。また、複数の経路を登録するメモリスイッチ57は、メモリスイッチ57aないし57cに限定されず、より多くの経路の数に応じた数のメモリスイッチ57を設けてもよい。
【0069】
(5)上述した実施例1では、メモリスイッチ57a,57cに記憶された経路に沿ってC形アーム7を待機位置P2,P3から透視撮影位置Q1,Q7まで移動させたが、反対に透視撮影位置Q1,Q7から待機位置P2,P3まで移動させてもよい。この場合、C形アーム7は、経路R1ないしR5、R11ないし13の順番に移動される。
【0070】
(6)上述した実施例2では、メモリスイッチ57bに記憶された経路に沿ってC形アーム7を透視撮影位置Q5,Q6から待機位置P2まで移動させたが、反対に待機位置P2から透視撮影位置Q5,Q6まで移動させてもよい。この場合、実施例1のように待機位置P2と透視撮影位置Q5,Q6とをそれぞれ結ぶ経路がメモリスイッチ57に設定されていればよい。
【符号の説明】
【0071】
1 … ベッド
71 … 検査室
73a〜73c … 機材
M … 被検体
P1〜P3 … 待機位置
Q1,Q2,Q7 … 透視撮影位置
R1〜R4 … 経路
R11〜R13 … 経路
【技術分野】
【0001】
この発明は、X線透視撮影装置に係り、特に、X線管とX線検出器とを対向支持する支持手段を透視撮影位置および待機位置との間で移動させる技術に関する。
【背景技術】
【0002】
従来、この種の装置として、X線管を懸垂保持する支持手段が天井面に対してx方向およびy方向に水平移動し、任意の停止位置で停止するものがある(例えば、特許文献1参照)。具体的には、この支持手段は、天井面に固定された固定レールと、この固定レールに取り付けられた可動レールに沿って天井面をx方向およびy方向方向に水平移動する。そして、支持手段を停止させる際は、各レールの所望の位置に配設されたセンサが起動すると、装置に取り付けられた制動機構が支持手段を停止させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−245726号公報(第10頁、図1,2,3)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような構成を有する従来例の場合には、次のような問題がある。
すなわち、従来の装置は、透視撮影中に支持手段が位置する透視撮影位置と透視撮影しない待機時間中に支持手段が位置する待機位置との間を移動させる際の経路が装置によって固定されている。すなわち、従来装置では、待機位置および透視撮影位置を結ぶ経路が1つしか設定されていない。その結果、ユーザーは、経路上に検査または治療用などで使用する機材が配設されると、待機位置から透視撮影位置まで装置を移動させることができなくなる。また、ある検査または治療において経路上を除いた位置に機材を配設したとしても、別の検査または治療においては検査室のルームレイアウトが変更されて、機材の位置も変更されることがあり、変更前の経路上に機材が位置してしまうことがある。また、検査室の広さ、機材の数、機材の種類、検査内容または治療内容などのユーザーの要望は、各々異なるのが常である。そうすると、装置を透視撮影位置と待機位置との間を移動させることができなくなるという問題があった。
【0005】
この発明は、このような事情に鑑みてなされたものであって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる汎用性の高いX線透視撮影装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、このような目的を達成するために、次のような構成をとる。
すなわち、請求項1に記載の発明は、被検体をX線透視撮影するX線透視撮影装置であって、X線管とX線検出器とを対向させて支持する支持手段と、前記支持手段をベッドに仰臥した被検体に対して回動および平行移動させる駆動手段と、透視撮影中に前記支持手段が位置する透視撮影位置と透視撮影しない待機時間中に前記支持手段が位置する待機位置とを結び、予め定められた複数の経路の中から1の経路を選択する選択手段と、前記選択手段によって選択された経路に沿って前記支持手段を回動および平行移動させる駆動制御手段を備えていることを特徴とするものである。
【0007】
[作用・効果]請求項1に記載の発明によれば、支持手段は、X線管とX線検出器とを対向させて支持し、駆動手段は、ベッドに仰臥した被検体に対して支持手段を回動および平行移動させる。駆動制御手段は、透視撮影中に支持手段が位置する透視撮影位置と透視撮影しない待機時間中に支持手段が位置する待機位置とを結び、予め定められた複数の経路の中から1の経路を選択する選択手段によって選択された経路に沿って支持手段を回動および平行移動させる。これにより、X線透視撮影用の検査室内において支持手段を回動および平行移動させる際に、予め定められた複数の経路の中から1の経路を選択し、その選択された経路に沿って支持手段を回動および平行移動させることがでる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、その検査室のルームレイアウトに合わせて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。また、検査室の広さ、機材の数、機材の種類、検査内容または治療内容など様々なユーザーの好みに対応できる汎用性の高いX線透視撮影装置を提供することができるので、ユーザーの要望にも応えることができる。
【0008】
また、この発明において、予め定められた複数の経路は、進行方向と支持手段の姿勢とが対応付けられた経路であることことが好ましい(請求項2記載の発明)。これにより、予め定められた複数の経路は、進行方向と支持手段の姿勢とが対応付けられているので、各ルームレイアウトごとにX線透視撮影による更に効率的な検査または治療を行うことができる。
【0009】
また、この発明において、前記透視撮影位置と前記待機位置とを結ぶ経路上に障害物が配置されている場合に、前記支持手段の姿勢は障害物との接触を回避するものであり、前記経路は前記障害物を迂回するものであることが好ましい(請求項3記載の発明)。これにより、透視撮影位置と待機位置とを結ぶ経路上に機材等の障害物が配置されている場合に、障害物との接触を回避する姿勢で支持手段を回動し、障害物を迂回する経路に沿って支持手段を平行移動させることができる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、検査室に配置される機材等の障害物の位置に応じて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0010】
また、この発明において、予め複数の前記経路を登録する登録手段を備え、前記選択手段は、前記登録手段によって予め登録された複数の経路の中から1の経路を選択することが好ましい(請求項4記載の発明)。これにより、ユーザー又は装置の製造業者が予め複数の経路を登録することによって、ユーザー又は装置の製造業者は、予め登録された複数の経路の中から1の経路を選択することができる。したがって、ユーザー又は装置の製造業者は、検査室の状況に応じて登録された複数の経路の中から所望の経路を選択することによって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0011】
また、この発明において、前記透視撮影位置および前記待機位置ごとに複数の経路が定められていることが好ましい(請求項5記載の発明)。これにより、複数の経路が透視撮影位置および待機位置ごとに定まっているので、透視撮影位置および待機位置の位置に合わせた可能な限り最短の経路に沿って支持手段を回動および平行移動させることができる。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができる。
【0012】
また、この発明において、複数の前記透視撮影位置の中から任意の位置を経由ポイントとして設定し、前記経由ポイントおよび前記待機位置ごとに複数の経路が定められていることが好ましい(請求項6記載の発明)。これにより、複数の透視撮影位置の中から任意の位置が経由ポイントとして定められ、経由ポイントおよび待機位置ごとに複数の経路が定められているので、透視撮影位置の数に対して設定される経路の数が少なくて済む。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができるとともに、経路の選択数を減らすことによって、操作し易くなる。
【0013】
また、この発明において、前記支持手段の姿勢は、前記透視撮影位置が前記ベッドの長手側および短手側のいずれであるかに合わせて変化されることが好ましい(請求項7記載の発明)。これにより、透視撮影位置がベッドの長手側および短手側のいずれであるかに合わせて支持手段の姿勢を変化させることによって、透視撮影位置がベッドの長手側および短手側のいずれである場合にも、透視撮影を開始し易い位置に合わせることができる。
【0014】
また、この発明において、前記支持手段の姿勢は、前記支持手段と前記X線管と前記X線検出器とを結んで形成される面を前記支持手段の進行方向に対して平行とすることが好ましい(請求項8記載の発明)。これにより、支持手段の姿勢が支持手段とX線管とX線検出器とを結んで形成される面を前記支持手段の進行方向に対して平行となることによって、支持手段とX線管とX線検出器とを結んで形成される面が支持手段の進行方向に対して直角となるときに比べて、進行方向に面する支持手段の面積が小さくなる。したがって、支持手段を細い経路に通すことができるので、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0015】
また、この発明において、複数の前記経路を各経路ごとに表示手段に表示させる表示制御手段を備えることが好ましい(請求項9記載の発明)。これにより、ユーザーは、複数の前記経路を各経路ごとに表示手段で目視により確認できるので、X線透視撮影による効率的な検査または治療を行うことができる。
【発明の効果】
【0016】
この発明に係るX線透視撮影装置によれば、透視撮影位置と待機位置とを結び、進行方向と支持手段の姿勢とが対応付けられた経路として予め定められた複数の経路の中から1の経路を選択手段が選択し、駆動制御手段がこの経路に沿って支持手段を駆動させるので、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、その検査室のルームレイアウトに合わせて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【図面の簡単な説明】
【0017】
【図1】実施例1のX線透視撮影装置の全体構成を示す概略図である。
【図2】(a)は実施例1の装置を側面から見た側面図であり、(b)は実施例1の装置を正面から見た正面図である。
【図3】実施例1の装置の制御ブロック図である。
【図4】C形アームの経路の登録処理を説明するフローチャートである。
【図5】(a)は透視撮影位置と待機位置とを結ぶ経路を説明する模式図であり、(b)は別の経路を説明する模式図である。
【図6】(a)は透視撮影位置と待機位置とを結ぶ経路におけるC形アームの姿勢を説明する模式図であり、(b)は別の経路におけるC形アームの姿勢を説明する模式図である。
【図7】実施例1の装置の動作を説明するフローチャートである。
【図8】実施例1の装置の経路を表示する表示モニタの模式図である。
【図9】(a)は実施例2の装置において経由ポイントを介して透視撮影位置と待機位置とを結ぶ経路を説明する模式図であり、(b)は経由ポイントと透視撮影位置と待機位置との関係を説明する模式図である。
【図10】実施例2の装置の動作を説明するフローチャートである。
【実施例1】
【0018】
以下、図面を参照してこの発明の実施例1を説明する。
図1は、実施例1に係るX線透視撮影装置の全体構成を示す概略図であり、図2(a)は、実施例1の装置を側面から見た側面図であり、図2(b)は実施例1の装置を正面から見た正面図である。
【0019】
実施例1に係るX線透視撮影装置は、図1に示すように、ベッド1に仰向けに載置された被検体Mを挟んでX線管3とフラットパネル型二次元X線検出器5(以下、FPD5)とが対向配置されたC形アーム7と、C形アーム7を直交する3軸回りに回動させるとともに平行移動させるC形アーム駆動機構部9とを備えている。また、C形アーム駆動機構部9に駆動指令等を与える操作盤11がベッド1の側面に配設されている。なお、C形アーム7は本発明における支持手段に相当し、C形アーム駆動機構部9は本発明の駆動手段に相当する。
【0020】
C形アーム駆動機構部9は、C形アーム7がC形アーム保持部23に対してスライドする方向(水平なY軸周りの方向)であるα方向に回動させるスライド機構部21と、スライド機構部21を含むC形アーム保持部23と、C形アーム保持部23を支持するとともにC形アーム保持部23の支柱部27に対しての回転方向(Y軸に対して直交するX軸周りの方向)であるβ方向に回動させる回動機構部25と、回動機構部25の上端に配設される支柱部27と、支柱部27の上端に配設されて支柱部27を鉛直軸(Z軸)方向であるγ方向に回動させる旋回機構部29と、旋回機構部29が取り付けられた可動台31と、可動台31をy方向に平行移動させる可動レール33と、可動レール33をx方向に平行移動させる固定レール35とで構成されている。固定レール35は天井面37に敷設されている。なお、図示の都合上、図1では、y方向を示す矢印はx方向を示す矢印に対して斜め方向を向いているが、y方向はx方向に直交する方向である。
【0021】
図2(a)に示すように、スライド機構部21の内部にはモータM1が配設され、モータM1を正逆方向に駆動することによってC形アーム7をα方向に回動させる。回動機構部25の内部にはモータM2が配設され、モータM2を正逆方向に駆動することによってC形アーム保持部23をβ方向に回動させる。旋回機構部29の内部にはモータM3が配設され、モータM3を駆動することによって支柱部27をγ方向に回動させる。可動レール33に面する可動台31の上面にはモータM4が配設され、モータM4の出力軸に取り付けられた車輪W1は、可動レール33の案内面に配設されている。モータM4を正逆方向に駆動することによって、可動台31はy方向に平行移動する。図2(b)に示すように、固定レール35に面する可動レール33の上面にはモータM5が配設され、モータM5の出力軸に取り付けられた車輪W2は、固定レール35の案内面に配設されている。モータM5を正逆方向に駆動することによって、可動レール33はx方向に平行移動する。
【0022】
図3を参照して、C形アーム駆動機構部9の駆動制御について説明する。なお、図3は、実施例1の装置の操作盤の概略構成図を含む実施例1の装置の制御ブロック図である。
【0023】
操作盤11は、C形アーム7のα方向およびβ方向の回動およびxy方向の平行移動を入力する操作グリップ51と、C形アーム7のγ方向の回動を入力する旋回スイッチ53と、C形アーム7のxy方向の駆動量および進行方向とαβγ方向の姿勢とをC形アーム7の経路として記憶する複数個のメモリスイッチ57(例えば、メモリスイッチ57aないし57c)と、メモリスイッチ57aないし57cに記憶された経路に沿ってC形アーム7を回動および平行移動させるメモリ実行スイッチ61とを備えている。操作グリップ51には、スライド用スイッチ52aと回転用スイッチ52bと平行移動用スイッチ52cが配設されている。スライド用スイッチ52aまたは回転用スイッチ52bを押下しながらC形アーム7の設置位置に応じて操作グリップ51を上下又は回転させることにより、C形アーム7はα方向またはβ方向に回動する。また、平行移動用スイッチ52cを押下しながら操作グリップ51を上下又は回転させることにより、C形アーム7はx方向又はy方向に平行移動する。なお、メモリスイッチ57aないし57cはこの発明の選択手段に相当する。
【0024】
CPU63は、メモリスイッチ57aないし57cからの経路情報を入力して、C形アーム駆動機構部9によるC形アーム7のαβγ方向への回動およびxy方向への平行移動を制御する。また、表示制御部64aは、FPD5によって取得された被検体Mの画像情報を表示パネル64bに表示させる。また、表示制御部64aは、C形アーム7の経路を表示パネル64bに表示させることも可能である。なお、CPU63は、この発明の駆動制御手段に相当し、表示パネル64bと表示制御部64aは、この発明の表示手段と表示制御手段に相当する。
【0025】
α方向又はβ方向の回動制御について説明する。操作グリップ51の操作によってC形アーム7を回動させる場合、CPU63は、操作グリップ51の操作方向および操作量に応じてモータM1又はモータM2の回転方向および回転角度を算出し、目的回動情報としてモータM1又はモータM2に出力する。CPU63は、モータM1又はモータM2に取り付けられたロータリーエンコーダD1又はD2によって検出される実回動情報を入力し、実回動情報が目的回動情報と一致するように制御する。経路情報に基づいてC形アーム7を回動させる場合は、操作グリップ51を介さずに、α方向およびβ方向の経路情報に従ってモータM1およびモータM2を駆動する。
【0026】
γ方向の回動制御について説明する。左右の旋回スイッチ53のいずれが押下されたか、および旋回スイッチ53が押下された時間に応じてモータM3の回転方向および回転角度を算出し、目的回動情報としてモータM3に出力する。CPU63は、モータM3に取り付けられたロータリーエンコーダD3によって検出される実回動情報を入力し、実回動情報が目的回動情報と一致するように制御する。なお、経路情報に基づいてC形アーム7を回動させる場合は、旋回スイッチ53を介さずに、γ方向の経路情報に従ってモータM3を駆動する。
【0027】
x方向およびy方向の平行移動制御について説明する。平行移動用スイッチ52cが押下された状態での操作グリップ51の操作方向および操作時間に応じてモータM4,M5の回転方向および回転角度を算出し、目的回動情報としてモータM4,M5に出力する。CPU63は、モータM4,M5に取り付けられたロータリーエンコーダD4,D5によって検出される実回動情報を入力し、実回動情報が目的回動情報と一致するように制御する。なお、経路情報に基づいてC形アーム7を平行移動させる場合は、操作グリップ51を介さずに、xy方向の経路情報に従ってモータM4.M5を駆動する。
【0028】
図4を参照して、C形アーム7を回動および平行移動させる経路をメモリスイッチ57に登録させる処理について説明する。なお、図4は、本実施例装置の経路の登録処理を説明するフローチャートである。
【0029】
ここで、経路とは、被検体Mを透視撮影中にC形アーム7が位置する透視撮影位置と被検体Mを透視撮影しない待機時間中にC形アーム7が位置する待機位置(一例として待機位置P2と呼ぶ)との間をC形アーム7が回動および平行移動する際のルートである。経路には、C形アーム7の進行方向と各位置におけるC形アーム7の姿勢が含まれる。なお、経路の登録処理は、装置の製造者によって行われることもあり、装置のユーザーによって行われることもある。装置の製造業者によって経路が登録される場合は、予め各メモリスイッチ57aないし57cに経路情報が記憶されている。ここでは、装置のユーザーが検査室のルームレイアウトごとに経路を登録する場合を例に挙げて説明する。
【0030】
ユーザーは、被検体Mを透視撮影中にC形アーム7が位置する透視撮影領域Q内の透視撮影位置(一例としてQ1と呼ぶ)にC形アーム7を移動させる(ステップST1)。具体的には、操作盤11の操作グリップ51と旋回スイッチ53と平行移動スイッチ55とを操作して、C形アーム7のxy方向およびαβγ方向の位置を決める。
【0031】
メモリスイッチ57のうち57a,57b,57cのいずれかのスイッチを長押する(ステップST2)。メモリスイッチ57の長押しによって経路の登録処理が開始される。
【0032】
ユーザーは、操作グリップ51と旋回スイッチ53と平行移動スイッチ55とを操作して、透視撮影位置Q1から待機位置P2までC形アーム7を回動および平行移動させる(ステップST3)。
【0033】
ユーザーは、C形アーム7が待機位置P2に到着した場合、操作盤11による操作を終了し、C形アーム7の回動および平行移動を停止する(ステップST4)。C形アーム7が待機位置P2に到着していない場合、待機位置P2に到着するまでC形アーム7を回動および平行移動させる。
【0034】
ユーザーは、C形アーム7の回動および平行移動を停止させると、メモリスイッチ57の長押しを解除する(ステップST5)。メモリスイッチ57の長押し解除によって経路の登録処理が終了され、C形アーム7を回動および平行移動させる際の、モータM1ないしM5の回転方向および回転角度がC形アーム7の経路を示す経路情報として選択されたメモリスイッチ57aないし57cのいずれかに登録される。このとき、C形アーム7のαβγの回動方向は、経路におけるC形アーム7の姿勢に相当し、C形アーム7のxyの平行移動方向は、経路における進行方向に相当する。なお、メモリスイッチ57の長押しによる経路の登録機能は、この発明の登録手段に相当する。
【0035】
図5および図6を参照して、検査室71におけるC形アーム7の経路と、検査室71のルームレイアウトを変更するとともに透視撮影位置を変更した場合におけるC形アーム7の別の経路とについて説明する。なお、図5(a)は、実施例1の装置の経路を説明する模式図であり、図5(b)は、実施例1の装置の別の経路を説明する模式図である。図6(a)は、実施例1の装置が経路上で採る姿勢を説明する模式図であり、図6(b)は、実施例1の装置が別の経路上で採る姿勢を説明する模式図である。
【0036】
なお、実施例1の装置が配設される検査室71を4つの方向で表す。図5(a)に示すように、ベッド1の長手方向で被検体Mの脚部から頭部へ向かう方向をXa方向とし、その反対方向をXbとする。また、ベッド1の短手方向でベッド1に仰向けに載置された被検体Mの右手から左手へ向かう方向をYaとし、その反対方向をYbとする。
【0037】
図5(a)に示すように、C形アーム7は、被検体Mの頭部に対してXa方向寄りに設定されている透視撮影位置Q1に配設されており、X線管3とFPD5が被検体Mの頭部付近を挟んだ姿勢で配設されている。透視撮影位置Q1と最寄りの待機位置P1とを結ぶ直線上には機材73aが配設されているので、C形アーム7を透視撮影位置Q1からXa方向に移動させることはできない。また、C形アーム7をそのままの姿勢でYa方向に移動させると、機材73bに接触するので、透視撮影位置Q1からそのままの姿勢でYa方向に移動させることもできない。そこで、C形アーム7をXa方向に少し平行移動させて(経路R1)、図6(a)に示すように、透視撮影位置Q1においてC形アーム7のγ方向の姿勢を時計回りに90度回転させ(経路R2)、Ya方向に移動させる(経路R3)。C形アーム7は検査室71のYa方向側の壁面付近でXa方向に進路を変えるが、そのままの姿勢では機材73cに接触する。そこで、図6(a)に示すように、C形アーム7のγ方向の姿勢を反時計回りに90度回転させ(経路R4)、Xa方向に移動させる(経路R5)。C形アーム7は、経路R5上にある待機位置P2で停止される。この経路R1ないしR5に関する情報は、図3に示すメモリスイッチ57aに登録される。なお、機材73a,73b,73cはこの発明における障害物に相当する。
【0038】
なお、透視撮影位置がQ1ではなく、被検体Mの左手側に近い透視撮影位置Q5や被検体Mの右手側に近い透視撮影位置Q7である場合、透視撮影位置Q5又はQ7に位置するC形アーム7は透視撮影位置Q1に移動してから、透視撮影位置Q1から待機位置P2まで前述の経路に沿って移動する。このとき、透視撮影位置Q1は、経由ポイントとして機能する。
【0039】
次に、検査室71のルームレイアウトおよび透視撮影位置を変更した場合について説明する。図5(b)に示すように、C形アーム7は、被検体Mの右脚部に対してYb方向寄りに設定されている透視撮影位置Q7に配設されており、X線管3とFPD5が被検体Mの右脚部付近を挟んだ姿勢で配設されている。C形アーム7をYb方向に移動させ、検査室71のYb方向側の壁面に沿ってそのままの姿勢でXa方向に移動させようとすると、機材74に接触する。そこで、図6(b)に示すように、透視撮影位置Q7からC形アーム7をYb方向に移動させ(経路R11)、Yb方向側の壁面付近でC形アーム7のγ方向の姿勢を時計回りに90度回転させて(経路R12)、機材74の脇を通ってXa方向に移動させる(経路R13)。そして、C形アーム7を待機位置P3で停止させる。この経路R11ないしR13に関する情報は、図3に示すメモリスイッチ57cに登録される。
【0040】
なお、透視撮影位置がQ7ではなく透視撮影位置Q1又はQ5である場合、透視撮影位置Q1又はQ5に位置するC形アーム7は透視撮影位置Q7に移動してから、透視撮影位置Q7から待機位置P3まで前述の経路に沿って移動する。このとき、透視撮影位置Q7は、経由ポイントとして機能する。
【0041】
図7を参照して、登録された経路に沿って待機位置から透視撮影位置までC形アーム7を回動および平行移動させる駆動制御について説明する。待機位置と透視撮影位置と検査室71のルームレイアウトは、図5および図6を参照する。なお、図7は、実施例1の装置の動作を説明するフローチャートである。
【0042】
待機位置と透視撮影位置とを結ぶ直線上に機材があるか否か確認する(ステップST11)。仮に、待機位置P1と透視撮影位置Q1とを結ぶ直線上に機材73aがない場合、C形アーム7をそのまま待機位置P1から透視撮影位置Q1まで移動させ(ステップST12)、透視撮影位置Q1でC形アーム7を停止させる(ステップST13)。
【0043】
図5(a)の検査室71のルームレイアウトにおいて、待機位置がP2で透視撮影位置がQ1である場合、機材73aないし73cが配設されているので、これらの機材を避ける図3に示すメモリスイッチ57aを選択して押下する(ステップST14)。メモリ実行スイッチ61を押下して、メモリスイッチ57aに登録された経路R1ないしR5をR5から順番に実行する(ステップST15)。具体的には、待機位置P2で待機しているC形アーム7は、経路R5に沿ってXb方向に平行移動され、経路R4の地点でγ方向の姿勢を時計回りに90度回動され、経路R3に沿ってYb方向に平行移動され、経路R2の地点でγ方向の姿勢を反時計回りに90度回動され、経路R1に沿ってXb方向に平行移動され、透視撮影領域Q1で停止される(ステップST16)。
【0044】
図5(b)の検査室71のルームレイアウトにおいて待機位置がP3で透視撮影位置がQ7である場合は、機材73aおよび74が配設されているので、これらの機材を避ける図3に示すメモリスイッチ57cを選択して押下する(ステップST14)。メモリスイッチ57cおよびメモリ実行スイッチ61を押下して、メモリスイッチ57cに登録された経路R11ないしR13をR13から順番に実行する(ステップST15)。具体的には、待機位置P3で待機しているC形アーム7は、経路R13に沿ってXb方向に平行移動され、経路R12の地点でγ方向の反時計回りに90度回動され、経路R11に沿ってYa方向に平行移動され、透視撮影位置Q3で停止される(ステップST16)。
【0045】
図8を参照して、上述した経路を表示モニタ64bに表示させる構成について説明する。なお、図8は、実施例1の装置の経路を表示する表示モニタの模式図である。
【0046】
表示モニタ64bには、検査室71を示す枠、ベッド1、待機位置P1ないしP3、透視撮影位置Q1,Q7、および経路を示す情報が表示されている。上述の経路R1ないしR5は、待機位置P2と透視撮影位置Q1とを結ぶ経路RAとして表示パネル64b上に表示されている。また、上述の経路R11ないしR13は、待機位置P3と透視撮影位置Q7とを結ぶ経路RBとして表示されている。表示パネル64b上の経路RAは、メモリスイッチ57aに記憶されている経路に対応し、経路RBはメモリスイッチ57cに記憶されている経路に対応する。
【0047】
実施例1記載の発明によれば、検査室71内においてC形アーム7を回動および平行移動させる際に、透視撮影位置と待機位置とを結ぶ予め定められた複数の経路、例えば経路R1ないしR5と経路R11ないし13の中から1の経路を選択し、その選択された経路に沿ってC形アーム7を回動および平行移動させることがでるので、図5(a)(b)に示すような検査室71の状況に応じて経路を選択できる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、その検査室のルームレイアウトに合わせて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。また、検査室の広さ、機材の数、機材の種類、検査内容または治療内容など様々なユーザーの好みに対応できる汎用性の高いX線透視撮影装置を提供することができるので、ユーザーの要望にも応えることができる。
【0048】
実施例1記載の発明によれば、例えば図5(a)に示すように検査室71内に機材73aないし73cが配置されている場合に、機材73bおよび73cとの接触を回避する経路R2およびR4に示す姿勢でC形アーム7を回動し、機材73aないし73cを迂回する経路R1,R3,R5に沿ってC形アーム7を平行移動させることができる。また、例えば図5(b)に示すように検査室71内に機材73aおよび74が配設されている場合に、機材73aおよび74との接触を回避する経路R12に示す姿勢でC形アーム7を回動し、機材73aおよび74を迂回する経路R11およびR13に沿って、C形アーム7を平行移動させることができる。したがって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、検査室に配置される機材等の障害物の位置に応じて経路を選択することによって、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0049】
実施例1記載の発明によれば、検査室71のルームレイアウトに応じてユーザーが経路R1ないしR5をメモリスイッチ57aに登録し、経路R11ないしR13をメモリスイッチ57cに登録することによって、ユーザーは、予め登録された経路R1ないしR5または経路R11ないしR13のうちいずれかの経路を選択することができる。したがって、ユーザー又は装置の製造業者は、検査室の状況に応じて登録された複数の経路の中から所望の経路を選択することによって、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0050】
実施例1記載の発明によれば、透視撮影位置Q1および待機位置P2の場合の経路をR1ないしR5と定め、透視撮影位置Q7および待機位置P3の場合の経路をP11ないしR13と定めているので、透視撮影位置および待機位置の位置に合わせた可能な限り最短の経路に沿ってC形アーム7を回動および平行移動させることができる。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができる。
【0051】
実施例1記載の発明によれば、透視撮影位置がベッド1の短手側の透視撮影位置Q1である場合にはC形アーム7のγ方向の姿勢を経路R2およびR4の地点で90度ずつ変化させ、透視撮影位置がベッド1の長手側の透視撮影位置Q7である場合にはC形アーム7のγ方向の姿勢をR12の地点で90度変化させることによって、透視撮影位置がベッド1の長手側および短手側のいずれである場合にも、透視撮影を開始し易い位置に合わせることができる。
【0052】
実施例1記載の発明によれば、C形アーム7の姿勢は、図5(a)に示すルームレイアウトにおいては経路R1,R3,R5や、図5(b)に示すルームレイアウトにおいては経路R11,R13に示すように、C形アーム7とX線管3とFPD5とを結んで形成される面をC形アーム7の進行方向に対して平行とする。したがって、C形アーム7が進行中に通る面積が小さくなる。したがって、C形アーム7を細い経路に通すことができるので、検査室のルームレイアウトが検査または治療に応じて変更されるような検査室においても、各ルームレイアウトごとにX線透視撮影による効率的な検査または治療を行うことができる。
【0053】
実施例1記載の発明によれば、メモリスイッチ57aおよび57cに記憶された経路R1ないしR5、R11ないしR13を経路RAおよびRBとして表示パネル64bに表示させる表示制御部64aを備える。したがって、ユーザーは、メモリスイッチ57aおよび57cに対応する経路RAおよびRBを表示パネル64bで目視により確認できるので、X線透視撮影による効率的な検査または治療を行うことができる。
【実施例2】
【0054】
次に、図面を参照してこの発明の実施例2を説明する。
実施例2に係るX線透視撮影装置は、図9に示すように、複数の透視撮影位置に応じて複数の経由ポイントが設定されている点において実施例1と異なる。その他の構成については実施例1と同様のものは、重複記載を避けるため説明を省略する。なお、図9(a)は経由ポイントを介して透視撮影位置と待機位置とを結ぶ経路を説明する模式図であり、図9(b)は経由ポイントと透視撮影位置と待機位置との関係を説明する模式図である。
【0055】
図9(a)に示すように、ベッド1の周囲で透視撮影可能な領域である透視撮影領域内には、被検体Mの頭部に近い透視撮影位置Q1,Q2,Q3と、被検体Mの左手側に近い透視撮影位置Q4,Q5,Q6と、被検体Mの右手側に近い透視撮影位置Q7,Q8,Q9とが設けられている。透視撮影位置Q1は、ベッド1の短手側の中心部に位置し、経由ポイントS1として設定されている。透視撮影位置Q4は、ベッド1の長手側の中心部に位置し、経由ポイントS2として設定され、透視撮影位置Q8は、ベッド1の長手側で経由ポイントS2の対向位置に経由ポイントS3として設定されている。経由ポイントS1ないしS3におけるC形アームの姿勢は、X線管3とFPD5とが鉛直軸上に並ぶ姿勢である。
【0056】
設定された経由ポイントS1,S2,S3および待機位置P1,P2,P3ごとに検査室71のルームレイアウトに応じた経路を登録する。検査室71には、透視撮影位置Q1と最寄りの待機位置P1とを結ぶ直線上に機材75が配設されているので、経由ポイントS1から機材75を迂回して待機位置P2と結ばれる経路が登録される。また、経由ポイントS2からXa方向に直線上の経路にも機材75が配設されているので、経由ポイントS2から機材75を迂回して待機位置P2と結ばれる経路が登録される。また、経由ポイントS3からXa方向に直線状の経路にも機材75が配設されているので、経由ポイントS3から機材75を迂回して待機位置P3と結ばれる経路が登録される。各経路の登録については、上述の説明と同様であるので、重複記載を避けるため説明を省略する。
【0057】
透視撮影位置Q1ないしQ9と経由ポイントS1ないしS3と待機位置P1ないしP3との関係について、図9(b)を参照して説明する。透視撮影位置がQ1ないしQ3である場合、C形アーム7は最寄りの経由ポイントS1を経由して、機材75を迂回する経路に沿って待機位置P2まで移動する。この経由ポイントS1を経由する経路は、図3に示すメモリスイッチ57aに登録されている。透視撮影位置がQ4ないしQ6である場合、C形アーム7は最寄りの経由ポイントS2を経由して、機材75を迂回する経路に沿って待機位置P2まで移動する。この経由ポイントS2を経由する経路は、図3に示すメモリスイッチ57bに登録されている。透視撮影位置がQ7ないしQ9である場合、C形アーム7は最寄りの経由ポイントS3を経由して、機材75を迂回する経路に沿って待機位置P3まで移動する。この経由ポイントS3を経由する経路は、図3に示すメモリスイッチ57cに登録されている。なお、透視撮影位置Q1,Q4,Q7は経由ポイントS1,S2,S3とそれぞれ同じ位置なので、実質的な平行移動距離は0である。
【0058】
次に、図10を参照して、登録された経路に沿って経由ポイントを経由して透視撮影位置から待機位置までC形アーム7を回動および平行移動させる駆動制御について説明する。待機位置と透視撮影位置と検査室71のルームレイアウトは、図9を参照する。なお、図10は、実施例2の装置の動作を説明するフローチャートである。
【0059】
経由ポイントS1ないしS3からXa方向に直線上に機材があるか否か確認する(ステップST21)。仮に、機材75がない場合、透視撮影位置Q1ないしQ9から各経由ポイントS1ないしS3を介して待機位置P1ないしP3まで直線的にC形アーム7を移動させ(ステップST22)、C形アーム7を待機位置P1ないしP3で停止させる(ステップST23)。
【0060】
図9に示すように、経由ポイントS1ないしS3からXa方向に直線上に機材75がある場合について説明する。C形アーム7を透視撮影位置Q5から待機位置P2まで移動する際には、経由ポイントS2を経由するので、ユーザーは、メモリスイッチ57bを選択し(ステップST24)、メモリ実行スイッチ61を押下して、メモリスイッチ57bに記憶された経路情報を実行する(ステップST25)。
【0061】
メモリスイッチ57bとメモリ実行スイッチ61を押下すると、C形アーム7は、透視撮影位置Q5から最寄りの経由ポイントS2に移動する(ステップST26)。CPU63は、C形アーム7が経由ポイントS2に到達するまでC形アーム7を移動させ続ける(ステップST27)。C形アーム7が経由ポイントS2に達すると、メモリスイッチ57bに登録された経路に沿ってC形アーム7を回動および平行移動される(ステップST28)。待機位置P1ないしP3に到達するまでC形アーム7を回動および平行移動させ続け、待機位置P1ないしP3に到達すればC形アーム7の回動および平行移動を停止させる(ステップST29)。
【0062】
図9において、C形アーム7を透視撮影位置Q6から待機位置P2まで移動させる際も同様に、経由ポイントS2を経由するので、ユーザーは、メモリスイッチ57bを押下し、メモリ実行スイッチ61を押下する。これにより、C形アーム7は透視撮影位置Q9から経由ポイントS2を経由した後、上記と同様にメモリスイッチ57bに登録された経路に沿って経由ポイントS2から待機位置P2まで移動する。なお、C形アームが経由ポイントS2と同じ透視撮影位置Q4にある場合は、透視撮影位置Q4から経由ポイントS2への移動はなく、メモリスイッチ57bに登録された経路に沿って経由ポイントS2から待機位置P2まで移動する動作を開始する。
【0063】
実施例2記載の発明によれば、複数の透視撮影位置Q1ないしQ9の中から近接する透視撮影位置Q1ないしQ3、Q4ないしQ5、Q6ないしQ9ごとに、最寄りの位置S1ないしS3が経由ポイントして定められる。経由ポイントS1およびS2と待機位置P2とを結ぶ経路と、経由ポイントS3および待機位置P3を結ぶ経路が定められ、各経由ポイントおよび待機位置ごとに複数の経路が定められているので、透視撮影位置の数に対して設定される経路の数が少なくて済む。したがって、検査室の状況に応じて経路を選択できることによって、透視撮影位置および待機位置との間の移動時間を短縮することができるとともに、経路の選択数を減らすことによって、操作し易くなる。
【0064】
この発明は、上記実施形態に限られることはなく、下記のように変形実施することができる。
【0065】
(1)上述した各実施例では、C形アーム7の経路は、進行方向とC形アーム7の姿勢とが対応付けられていると述べたが、進行方向と姿勢とが対応付けられていない経路であってもよい。この場合、C形アーム7の経路は、C形アーム7の進行方向を定めるものとなる。
【0066】
(2)上述した各実施例では、待機位置をP1ないしP3とし、透視撮影位置をQ1ないしQ9のいずれかとしたが、これに限定されず、検査室71のルームレイアウトおよび透視撮影の部位や方向等によって設定できる。また、待機位置を特定の位置に設定せずに、検査室71のXa方向の壁側のように大まかに設定しても良い。
【0067】
(3)上述した各実施例では、進行方向とC形アーム7の姿勢とが対応付けられた経路として、経路R2,R4,R12に示すようなγ方向の姿勢を挙げたが、これに限定されず、α方向やβ方向の姿勢であってもよい。例えば、X線管3とFPD5とが鉛直軸上に位置する姿勢において、α方向またはβ方向に90度回動させれば、X線管3とFPD5とを結ぶ水平軸から床面までの間にスペースが生まれる。このスペースに収まるような高さの機材であれば、C形アームをα方向またはβ方向に90度回動させた姿勢で経路上の進行方向と対応付けてもよい。
【0068】
(4)上述した各実施例では、予め定められた複数の経路として、経路R1ないしR4とR11ないしR13とを挙げたが、これに限定されず、複数の透視撮影位置および複数の待機位置ごとにさらに複数の経路を定めても良い。また、複数の経路を登録するメモリスイッチ57は、メモリスイッチ57aないし57cに限定されず、より多くの経路の数に応じた数のメモリスイッチ57を設けてもよい。
【0069】
(5)上述した実施例1では、メモリスイッチ57a,57cに記憶された経路に沿ってC形アーム7を待機位置P2,P3から透視撮影位置Q1,Q7まで移動させたが、反対に透視撮影位置Q1,Q7から待機位置P2,P3まで移動させてもよい。この場合、C形アーム7は、経路R1ないしR5、R11ないし13の順番に移動される。
【0070】
(6)上述した実施例2では、メモリスイッチ57bに記憶された経路に沿ってC形アーム7を透視撮影位置Q5,Q6から待機位置P2まで移動させたが、反対に待機位置P2から透視撮影位置Q5,Q6まで移動させてもよい。この場合、実施例1のように待機位置P2と透視撮影位置Q5,Q6とをそれぞれ結ぶ経路がメモリスイッチ57に設定されていればよい。
【符号の説明】
【0071】
1 … ベッド
71 … 検査室
73a〜73c … 機材
M … 被検体
P1〜P3 … 待機位置
Q1,Q2,Q7 … 透視撮影位置
R1〜R4 … 経路
R11〜R13 … 経路
【特許請求の範囲】
【請求項1】
被検体をX線透視撮影するX線透視撮影装置であって、X線管とX線検出器とを対向させて支持する支持手段と、前記支持手段をベッドに仰臥した被検体に対して回動および平行移動させる駆動手段と、透視撮影中に前記支持手段が位置する透視撮影位置と透視撮影しない待機時間中に前記支持手段が位置する待機位置とを結び、予め定められた複数の経路の中から1の経路を選択する選択手段と、前記選択手段によって選択された経路に沿って前記支持手段を回動および平行移動させる駆動制御手段を備えていることを特徴とするX線透視撮影装置。
【請求項2】
請求項1記載のX線透視撮影装置において、予め定められた複数の経路は、進行方向と支持手段の姿勢とが対応付けられた経路であることを特徴とするX線透視撮影装置。
【請求項3】
請求項1または2記載のX線透視撮影装置において、前記透視撮影位置と前記待機位置とを結ぶ経路上に障害物が配置されている場合に、前記支持手段の姿勢は障害物との接触を回避するものであり、前記経路は前記障害物を迂回するものであることを特徴とするX線透視撮影装置。
【請求項4】
請求項1または3のいずれかに記載のX線透視撮影装置において、予め複数の前記経路を登録する登録手段を備え、前記選択手段は、前記登録手段によって予め登録された複数の経路の中から1の経路を選択することを特徴とするX線透視撮影装置。
【請求項5】
請求項1ないし4のいずれかに記載のX線透視撮影装置において、前記透視撮影位置および前記待機位置ごとに複数の経路が定められていることを特徴とするX線透視撮影装置。
【請求項6】
請求項1ないし5のいずれかに記載のX線透視撮影装置において、複数の前記透視撮影位置の中から任意の位置を経由ポイントして設定し、前記経由ポイントおよび前記待機位置ごとに複数の経路が定められていることを特徴とするX線透視撮影装置。
【請求項7】
請求項1ないし6のいずれかに記載のX線透視撮影装置において、前記支持手段の姿勢は、前記透視撮影位置が前記ベッドの長手側および短手側のいずれであるかに合わせて変化されることを特徴とするX線透視撮影装置。
【請求項8】
請求項1ないし7のいずれかに記載のX線透視撮影装置において、前記支持手段の姿勢は、前記支持手段と前記X線管と前記X線検出器とを結んで形成される面を前記支持手段の進行方向に対して平行とすることを特徴とするX線透視撮影装置。
【請求項9】
請求項1ないし8のいずれかに記載のX線透視撮影装置において、複数の前記経路を各経路ごとに表示手段に表示させる表示制御手段を備えることを特徴とするX線透視撮影装置。
【請求項1】
被検体をX線透視撮影するX線透視撮影装置であって、X線管とX線検出器とを対向させて支持する支持手段と、前記支持手段をベッドに仰臥した被検体に対して回動および平行移動させる駆動手段と、透視撮影中に前記支持手段が位置する透視撮影位置と透視撮影しない待機時間中に前記支持手段が位置する待機位置とを結び、予め定められた複数の経路の中から1の経路を選択する選択手段と、前記選択手段によって選択された経路に沿って前記支持手段を回動および平行移動させる駆動制御手段を備えていることを特徴とするX線透視撮影装置。
【請求項2】
請求項1記載のX線透視撮影装置において、予め定められた複数の経路は、進行方向と支持手段の姿勢とが対応付けられた経路であることを特徴とするX線透視撮影装置。
【請求項3】
請求項1または2記載のX線透視撮影装置において、前記透視撮影位置と前記待機位置とを結ぶ経路上に障害物が配置されている場合に、前記支持手段の姿勢は障害物との接触を回避するものであり、前記経路は前記障害物を迂回するものであることを特徴とするX線透視撮影装置。
【請求項4】
請求項1または3のいずれかに記載のX線透視撮影装置において、予め複数の前記経路を登録する登録手段を備え、前記選択手段は、前記登録手段によって予め登録された複数の経路の中から1の経路を選択することを特徴とするX線透視撮影装置。
【請求項5】
請求項1ないし4のいずれかに記載のX線透視撮影装置において、前記透視撮影位置および前記待機位置ごとに複数の経路が定められていることを特徴とするX線透視撮影装置。
【請求項6】
請求項1ないし5のいずれかに記載のX線透視撮影装置において、複数の前記透視撮影位置の中から任意の位置を経由ポイントして設定し、前記経由ポイントおよび前記待機位置ごとに複数の経路が定められていることを特徴とするX線透視撮影装置。
【請求項7】
請求項1ないし6のいずれかに記載のX線透視撮影装置において、前記支持手段の姿勢は、前記透視撮影位置が前記ベッドの長手側および短手側のいずれであるかに合わせて変化されることを特徴とするX線透視撮影装置。
【請求項8】
請求項1ないし7のいずれかに記載のX線透視撮影装置において、前記支持手段の姿勢は、前記支持手段と前記X線管と前記X線検出器とを結んで形成される面を前記支持手段の進行方向に対して平行とすることを特徴とするX線透視撮影装置。
【請求項9】
請求項1ないし8のいずれかに記載のX線透視撮影装置において、複数の前記経路を各経路ごとに表示手段に表示させる表示制御手段を備えることを特徴とするX線透視撮影装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−81489(P2013−81489A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2010−34553(P2010−34553)
【出願日】平成22年2月19日(2010.2.19)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成22年2月19日(2010.2.19)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]