
X線透視検査装置及びX線透視検査方法
【課題】 被検体の着目点高さが未知であっても、確実に視野ずれをなくすことにある。
【解決手段】 X線源1と、テーブル2に載置された被検体3の着目点の透過像を検出するX線検出器4と、X線検出器4を移動させる移動機構6と、テーブル2を平行移動させる移動機構8と、データ処理部5とを備え、このデータ処理部5は、着目点までの推定高さを入力する推定高さ入力手段17と、X線源とX線検出器との距離とX線源と着目点との距離との比である透過像の拡大率を設定する拡大率設定手段11,15aと、X線の光軸が所要傾斜角度となるようにX線検出器を制御する移動制御手段18と、拡大率と傾斜角度と推定高さをパラメータとし、テーブル2の移動位置を計算し、テーブルを移動制御する視野ずれ補正手段11,15bと、透過像上の着目点のずれ量に基づき、着目点の真の高さを求める高さ修正手段11,15cとを設けたX線透視検査装置である。
【解決手段】 X線源1と、テーブル2に載置された被検体3の着目点の透過像を検出するX線検出器4と、X線検出器4を移動させる移動機構6と、テーブル2を平行移動させる移動機構8と、データ処理部5とを備え、このデータ処理部5は、着目点までの推定高さを入力する推定高さ入力手段17と、X線源とX線検出器との距離とX線源と着目点との距離との比である透過像の拡大率を設定する拡大率設定手段11,15aと、X線の光軸が所要傾斜角度となるようにX線検出器を制御する移動制御手段18と、拡大率と傾斜角度と推定高さをパラメータとし、テーブル2の移動位置を計算し、テーブルを移動制御する視野ずれ補正手段11,15bと、透過像上の着目点のずれ量に基づき、着目点の真の高さを求める高さ修正手段11,15cとを設けたX線透視検査装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検体にX線を透過させて被検体内部を非破壊で検査するX線透視検査装置及びX線透視検査方法に係り、特に、電子部品を実装した基板等の板状の被検体を透視角度(傾斜角)を変えて検査するX線透視検査装置及びX線透視検査方法に関する。
【背景技術】
【0002】
電子部品を実装した基板等の被検体に対し、X線を照射し、そのX線透過像から被検体内部の状態を検査するX線透視検査装置は、既に提案されている(特許文献1)。
【0003】
この特許文献によるX線透視検査装置は、X線源とX線検出器とを同時に、あるいはX線検出器のみを旋回させ、X線光軸を、被検体載置用テーブル面の法線から傾斜させることにより、透視角度を変えて被検体を透視し、X線透過像を取得する。
【0004】
このようなX線透視検査装置は、X線検出器等を旋回させて透視角度を変えたとき、テーブルを自動的に水平方向にスライド移動させることにより、X線光軸が被検体の着目点からずれないようにしている。
【0005】
ところで、通常、被検体の着目点は、被検体自体が所要の厚みを持っていることから、テーブル面から所要の高さだけ高位置に存在する。その結果、着目点の高さに応じて、視野ずれ補正用のスライド移動の仕方が変わってくる。
【0006】
そこで、前述したX線透視検査装置では、操作者が予め着目点の高さを被検体の着目点の高さとして入力し、視野ずれが生じないように補正している。
【特許文献1】特開2001−281168号公報(図1参照)
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、以上のようなX線透視検査装置においては、透視角度を変えても、被検体の着目点がX線透過像の視野からずれないようにするためには、テーブル面からの被検体の着目点までの高さを知る必要があり、そのために操作者が被検体の厚み相当分の値を入力している。
【0008】
しかし、テーブル面から被検体の着目点までの高さは、正確には、検査装置が認識する基準面(例えば理想的なテーブル面)からの高さであり、基準面に対する被検体の載置高さが一定でなくなれば、入力された着目点の高さの正確性も疑わしくなる。基準面からの高さは、実際上、テーブル面のたわみ、テーブル面に接触する被検体の表面のたわみ、被検体の表面の凹凸等々の要因によって変化する。その結果、以上のような種々の変化要因がある限り、基準面から着目点までの高さを正確に把握することが難しい。よって、透過像上の着目点のずれによって、視野ずれが生じ易い状況にある。
【0009】
本発明は上記事情に鑑みてなされたもので、被検体の着目点の高さが未知であっても、X線光軸の傾斜時に透過像上の着目点のずれ量から真の高さを計算し修正し、確実に視野ずれをなくすことができるX線透視検査装置及びX線透視検査方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
(1) 上記課題を解決するために、本発明は、テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置であって、X線検出器を移動させる検出器移動機構と、テーブルを3方向に平行移動させるテーブル移動機構と、入力部及びX線検出器で検出された透過像を表示する表示部を有するデータ処理手段とを備え、
前記データ処理手段は、前記入力部より、基準の面から前記着目点までの推定高さを入力する推定高さ入力手段と、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定手段と、前記X線の光軸が基準の方向から所要の傾斜角度となるように前記検出器移動機構を介して前記X線検出器を移動制御する検出器移動制御手段と、前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブル移動機構を介して前記テーブルを移動制御する視野ずれ補正手段と、この視野ずれ補正手段の移動制御によって前記テーブルが移動したとき、前記推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正手段とを設け、この修正手段によって求めた前記着目点の真の高さに基づき、前記視野ずれ補正手段を再度実行する構成である。
【0011】
なお、前記着目点高さ修正手段としては、表示された透過像上のずれ量を伴った着目点を位置指定することにより、着目点の推定高さと位置指定信号とから真の高さを求めるものである。
【0012】
(2) また、本発明は、テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記被検体の着目点が前記表示された透過像の中央にくるように前記テーブルをテーブル面に沿った方向に移動制御する着目点調整ステップと、外部より、基準の面から前記着目点までの推定高さが入力され、かつ、前記テーブルをテーブル面に垂直に移動させたとき、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定ステップと、前記X線の光軸が基準の方向から所要の傾斜角度となるように前記X線検出器を移動制御する検出器移動ステップと、前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブルを移動制御する視野ずれ補正ステップと、この視野ずれ補正ステップの移動制御によって前記テーブルを移動させた後、前記着目点の推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正ステップと、この修正ステップによって求めた前記着目点の真の高さに基づき、前記視野ずれ補正ステップを再度実行し、前記透過像上の前記着目点のずれ量を無くするステップとを有するX線透視検査方法である。
【0013】
なお、前記着目点高さ修正ステップ及び透過像上の前記着目点のずれ量を無くするステップに代えて、外部より、変更された前記着目点の推定高さが入力されるごとに、前記着目点の推定高さのみを変更された値に変更して前記視野ずれ補正ステップを繰り返し実行し、前記透過像上の前記着目点のずれを無くするステップを有するものでもよい。
【発明の効果】
【0014】
本発明によれば、被検体の着目点の高さが未知であっても、X線光軸の傾斜時に透過像上の着目点のずれ量から真の高さを計算し修正するので、確実に視野ずれをなくすことができるX線透視検査装置及びX線透視検査方法を提供できる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施形態について図面を参照して説明する。
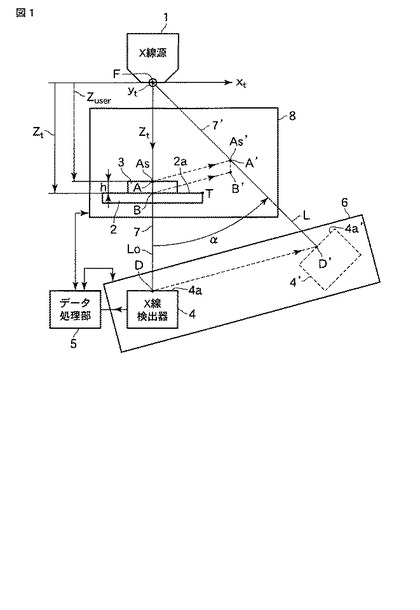
図1は本発明に係るX線透視検査装置の一実施の形態を示す概念的な構成図である。
【0016】
同図において、1はX線ビームを発生するX線管などのX線源であって、このX線源1のX線焦点Fから下方に向けて広範囲に発生されたX線ビームの一部は真下に配置されたテーブル2上の被検体3に向けて照射される。
【0017】
4はX線検出器であって、例えば縦横に配列された複数のX線検出素子を有する2次元アレイが採用され、前述するX線ビームの照射のもとに被検体3内部を透過してくるX線透過像を2次元分解能で検出し、データ処理部5に送る。X線検出器4は、データ処理部5からの移動制御指令を受けて動作する検出器移動機構6により、直線状あるいは円弧状に移動される。この移動中、X線検出器4は、検出面4aが常にX線焦点Fと向き合うように自転される。X線検出器4のD点は検出面4aの中心である。
【0018】
従って、X線ビームの照射範囲内で、X線検出器4を移動させるようにすれば、傾斜角度(透視角度)αを変えることができる。ここで、傾斜角度αとは、X線光軸(直線F−D)7とテーブル面2aの法線(基準の方向)とのなす角度である。
【0019】
一方、前記テーブル2は、データ処理部5からの移動制御指令を受けて動作するテーブル移動機構8により、テーブル面2aの向きを変えずに直交する3方向であるxt,yt,ztに平行移動するように位置設定される。xt,ytは互いに直交する水平方向、ztは垂直方向である。
【0020】
以下,xt,yt,ztは、テーブル2の各方向への移動量を表すものとする。また、テーブル面2a上の一点Tは、便宜上の移動基準を示す点であって、移動量xt,yt,ztは、X線焦点Fから計測されたT点の座標を表すように較正されているものとする。
【0021】
データ処理部5は、検出器移動機構6及びテーブル移動機構8に対して移動制御指令を出力するとともに、X線検出器4で検出されたX線透過像を表示する。
【0022】
すなわち、データ処理部5は、通常のコンピュータであって、具体的には図2に示すように、CPU(Central Processing Unit:中央演算ユニット)で構成されるデータ演算処理部11が設けられ、データ演算処理部11からバスライン12が導出されている。このバスライン12には、X線検出器4で検出された透過像データをデータ処理部5にて処理可能なデータに変換する検出器インターフェース13、メモリ14、ディスク15、表示出力インターフェース16、入力部17及び機構制御部18等が接続される。表示出力インターフェース16には表示部19が接続されている。その他、筐体、電源その他必要とする構成体等が設けられているが、発明の要旨とは直接関係ないことから省略する。
【0023】
データ演算処理部11は、検出器インターフェース13を介して、X線検出器4で検出された被検体3の透過像データ(ディジタルデータ)を取り込み、メモリ14あるいはディスク15に格納するとともに、当該透過像データを表示出力インターフェース16を介して表示部19に表示する。
【0024】
また、データ演算処理部11は、所定のプログラムにしたがって少なくとも拡大率設定、視野ずれ補正及び着目点高さ修正処理を実行し、必要に応じて検出器移動機構6及びテーブル移動機構8に移動制御指令を送出する。
【0025】
メモリ14は、データ演算処理部11が高速にランダムアクセスできる揮発性メモリである。
【0026】
ディスク15は、ランダムアクセスできず、かつ、アクセス速度が遅い副メモリである不揮発性メモリであるが、メモリ14よりも相当大きなメモリ容量を持っている。ここで、ランダムアクセスとは、任意の番地からデータを取り出すことを意味する。ディスク15には、少なくとも拡大率設定プログラム15a、視野ずれ補正プログラム15b及び着目点高さ修正プログラム15cが格納され、実行時には読み出され、メモリ14に格納される。
【0027】
拡大率設定プログラム15aは、X線源1と被検体3の着目点Aとの間の距離から決まる透過像の拡大率Mを設定する。視野ずれ補正プログラム15bは、当該拡大率MとX線源1の真下方向である垂直ライン(基準の方向)に対するX線光軸7の傾斜角度αと着目点の高さhとをパラメータとし、被検体3の着目点AがX線の光軸上に位置するように、テーブル2の移動位置を計算し、機構制御部18を通して移動制御指令をテーブル移動機構8に送出し、テーブル2を平行移動させることにより、視野ずれの補正を行う。
【0028】
着目点高さ修正プログラム15cは、X線の光軸7がX線管1の真下方向である垂直ラインから傾斜したときの透過像の上の着目点Aのずれ量に基づき、テーブル2からの着目点Aの修正された真の高さhを計算するプログラムである。
【0029】
表示出力インターフェース16は、例えば画像メモリや表示制御機能を有し、データ演算処理部11で取り込まれた被検体3の透過像データを画像メモリ等に格納し、表示制御機能に基づいて表示部19に表示する。
【0030】
入力部17は、操作者が必要なデータを入力したり、各種の制御指示を入力する機能を有するものであって、キーボード、マウス、トラックボール、ジョイスティック、タッチパッドなどが挙げられる。
【0031】
機構制御部18は、データ演算処理部11による演算結果に基づき、必要に応じて移動制御指令を出力し、検出器移動機構6及びテーブル移動機構8を移動制御する。
【0032】
次に、以上のように構成されたX線透視検査装置の作用について図3及び図4を参照して説明する。
【0033】
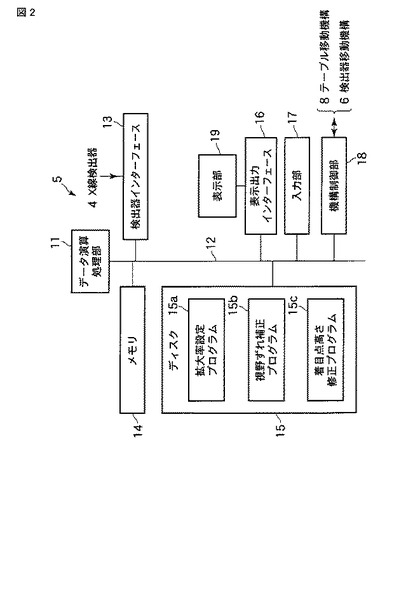
(1) 着目点Aの高さが既知の場合について(図3参照)。
【0034】
先ず、操作者は、X線検出器4の検出面4aの中心DがX線焦点Fの真下に位置するように設定し、垂直方向(α=0°)からの透過像を取得可能とした後、X線源1を励起し、当該X線源1からのX線ビームを被検体3に向けて照射する。この状態においては、X線検出器4で検出されたX線透過像がデータ処理部5の表示部19に表示される。
【0035】
操作者は、表示部19に表示されたリアルタイムな透過像を観察しながら、入力部17からxt,yt移動制御指令(xuser、yuser)を入力し、被検体3の着目点AがX線光軸7上に一致するようにテーブル移動機構8を移動させる。すなわち、着目点Aが透過像の中央に来るようにテーブル2を移動制御する(着目点調整ステップS1)。このとき、図1に示す点Bは着目点直下のテーブル面上の点である。
【0036】
引き続き、操作者は、入力部17からテーブル面2a(基準の面)から被検体3の着目点Aまでの既知高さhを入力設定した後、zt移動制御指令(zuser)を入力して画像の拡大、縮小の調整を行う。なお、このzt移動制御指令(zuser)は、入力部17のキーボードからの数値入力またはマウスなどを用いてカーソルを微小ステップずつ移動させるジョブ入力してもよい。
【0037】
ここで、入力部17から高さh及びzt移動制御指令(zuser)が入力されると、データ演算処理部11は、zt移動制御指令に従ってテーブル移動機構8を通してテーブル2の上下移動位置を設定する。ここで、zuserは、α=0°において、テーブル2の現在位置ztに対して、zuser=zt−hで定量される量であり、zuserはα=0°におけるX線焦点Fと着目点Aとの間の距離である。そして、データ演算処理部11は、拡大率設定プログラム15aに基づき、下記の演算式に基づいて透過像の拡大率(検査倍率)Mを算出して設定する(拡大率設定ステップS2)。
M=L0/zuser ……(1)
但し、L0は、α=0°におけるF−D間の距離である。ここで、拡大率MはX線源1(X線焦点F)とX線検出器4(検出面4aの中心D)との間の距離とX線源1(X線焦点F)と着目点Aとの間の距離との比である。
【0038】
なお、拡大率設定ステップS2では、ztとhとの入力から拡大率Mとzuserとを算出して設定したが、操作者がhとzuserとを入力し、ここから式(1)でMを算出して設定するようにしてもよい(拡大率設定ステップS2)。
【0039】
また、操作者がhとMとを入力し、拡大率設定プログラム15aが下式に基づいてztを求めた後、この求めたztに基づいてテーブル2を設定するようにしてもよい。
【0040】
zuser=L0/M …(1)’
zt(α=0°)=zuser+h …(1)”
この場合は、拡大率Mは操作者の入力した値に設定される(拡大率設定ステップS2)。この拡大率設定ステップS2においては、Mとzuserとは互いに従属で、どちらか一方が設定されれば他方は自動的に決まる関係にある。
【0041】
拡大率設定ステップS2に続き、操作者は、入力部17から検出器移動制御指令を入力し、あるいは傾斜角度αを直接入力し、検出器移動機構6を介してX線検出器4を移動させ、垂直ラインに対してX線光軸7の傾斜角度(透視角度)αを変える(検出器移動ステップS3)。このとき、データ演算処理部11は、αの値として、検出器移動位置から計算した値、あるいは操作者からの入力値をαの値とする。
【0042】
そして、X線検出器4が移動したとき、データ演算処理部11は、前述した傾斜角度α、拡大率M及び高さhを用いて、視野ずれ補正プログラム15bを実行し、下記の演算式に従ってテーブル移動量xt,yt,ztを求める。
xt=xuser+x(α,M)+x(h) ……(2)
yt=yuser+y(α,M)+y(h) ……(3)
zt=zuser+z(α,M)+z(h) ……(4)
上式において、
xuser,yuser,zuser:視野・拡大率設定項、
x(α,M),y(α,M),z(α,M):α,M視野ずれ補正項、
x(h)、y(h)、z(h):h視野ずれ補正項である。
【0043】
xuser,yuser,zuserは、視野・拡大率設定項であって、操作者が移動制御指令の下に適宜に直接的あるいは間接的に入力設定する値である。他の項の引数であるα,M,hは、同様に操作者が直接的あるいは間接的に設定する値である。α,M視野ずれ補正項とh視野ずれ補正項は視野ずれ補正プログラム15bがα,M,hの関数として自動的に決める項であって、図1に示す幾何においては、具体的には次のように決定される。
【0044】
x(α,M)=(L/M)・sinα ……(5)
y(α,M)=0(関係せず) ……(6)
z(α,M)=(L・conα−L0)/M …(7)
x(h)=0(関係せず) ……(8)
y(h)=0(関係せず) ……(9)
z(h)=h ……(10)
ここで、Lは傾斜角度α時のF−D間距離であって、一般にはαの関数である。
【0045】
データ演算処理部11は、前記式(2)〜式(4)に基づき、テーブル移動量xt,yt,ztを求めた後、機構制御部18からテーブル移動制御指令を出力し、テーブル移動機構8を介して前述したテーブル移動量xt,yt,ztに基づいてテーブル2を移動させることにより、視野ずれを補正する(視野ずれ補正ステップS4)。
【0046】
この視野ずれ補正ステップS4により、拡大率Mを一定に保ったまま、視野ずれを起こさずに傾斜角度αを変えることができる。
【0047】
さらに、データ演算処理部11は、操作者が設定する値に変更が有ったか否かを判定する(設定変更判定ステップS5)。変更が無かった場合には、終了指令が有ったか否かを判断し(終了ステップS8)、終了指令が有れば終了し、終了指令が無かった場合にはステップS5にもどる。
【0048】
ステップS5において、操作者が直接的または間接的に設定する値xuser,yuser,zuser,α,M,hの何れか1つ以上に変更があった場合(zuserとMは互いに従属)、データ演算処理部11は、ステップS1ないしステップS4の何れかに後退し、そこから再度同様の処理を繰り返す。
【0049】
どのステップに後退するかは変更されたパラメータに依存する。
【0050】
ステップS5では、少なくともxuser,yuserのどちらかが変更された場合は、着目点調整ステップS1に後退し、前述したように入力部17からxt,yt移動制御指令(xuser,yuser)を入力し、変更された被検体3の着目点Aが光軸7上に一致するようにテーブル2を移動させる(ステップS1)。この場合、一般に、αが0°でない状態でテーブル2の移動が行われる。
【0051】
ステップS1が終了した後、順次ステップS2,S3,S4を行い、ステップS5にもどる。但し、xuser,yuser以外の変更が無い場合にはステップS2,S3,S4では何も変更されない。
【0052】
ステップS5において、xuser,yuserに変更がなく、少なくともzuser(またはM)に変更があった場合にはステップS2に後退し、前述したように拡大率設定プログラム15aに基づき、前記式(1)によりMを計算し、設定し直す。Mが変更された場合には当該Mを設定値とするとともに、前記式(1)’でzuserを計算し直す。この場合、ステップS2では、一般にαが0°でない状態で設定される。
【0053】
ステップS2が終了した後、順次、ステップS3,S4を行ってステップS5にもどる。但し、αに変更がない場合、ステップS3では何も変更されない。
【0054】
ステップS5において、傾斜角度α、あるいは傾斜角度αと着目点高さhに変更があった場合、ステップS3に後退し、前述したように操作者によって検出器移動指令を入力し、検出器移動機構6を介してX線検出器4を移動させ、傾斜角度αを変える。そして、ステップS4、S5に進む。
【0055】
ステップS5において、着目点高さhのみに変更があった場合、ステップS4に移行し、前述したように視野ずれ補正プログラム15bに基づき、式(2)〜式(4)によりテーブル移動量xt,yt,ztを求め、テーブル移動機構8を介してテーブル2を移動させる。そして、ステップS4による処理終了後、ステップS5に移行する。
【0056】
以上のようにしてステップS5で変更があった場合には、変更内容に応じて前段のどれかのステップに後退し、各ステップを順次実行しながら再びステップS5にもどる。このループにおいては、変更内容に応じて後退するステップを変えているが、すべてステップS1にもどる流れであってもよい。この場合、変更に関係しないステップは何ら変更されずに空動作となるので、スキップするのと同様な処理となる。
【0057】
各ステップが関係する変更パラメータは、それぞれ
着目点調整ステップS1はxuser,yuser、
拡大率設定ステップS2はzuser,M 、
検出器移動ステップS3はα、
視野ずれ補正ステップS4はすべてのパラメータであり、この関係するパラメータ以外のパラメータに対しては各ステップとも空動作となる。
【0058】
また、ステップS5から後退し、再度ステップS5に進んでくるループでは、変更されなかったパラメータは常に一定に保たれる。例えばzuser(あるいはM)を変えなければ、拡大率は一定であり、また、xuser,yuser、hを変えなければ被検体3中の着目点は一定である。
【0059】
以上のように設定変更判定ステップS5にて設定変更があるたびに、前のステップに後退し、再度ステップS5に進んでくるループを繰り返してくるが、例えば変更を小刻みに少しずつ変更するループを繰り返せば、これら一連の移動制御は、計算時間が短いので、ほぼリアルタイムに位置変更し、連続的に視野ずれなしでX線透過像を取得することができる。
【0060】
従って、以上のような実施の形態によれば、被検体3の任意の座標位置及び任意の既知の高さに応じた着目点Aの透過像を、任意の拡大率M及び任意の傾斜角度αでもって視野ずれなく取得できる。
【0061】
よって、本発明によるX線透視検査装置は、操作者がα、M(またはzuser),hがどのような状態のときでも、xt,yt移動制御指令(xuser、yuser)を変更しつつ自由に視野変更でき、また、zt移動制御指令zuser(またはM),α、hを自由に変更しつつ視野ずれなしの状態に設定できる。
【0062】
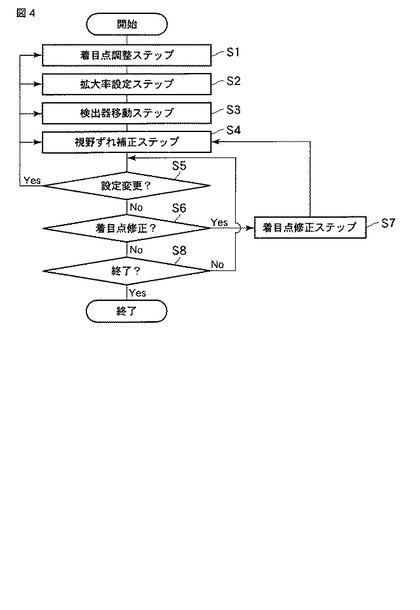
(2) 着目点Aの高さが未知の場合について(図4参照)。
【0063】
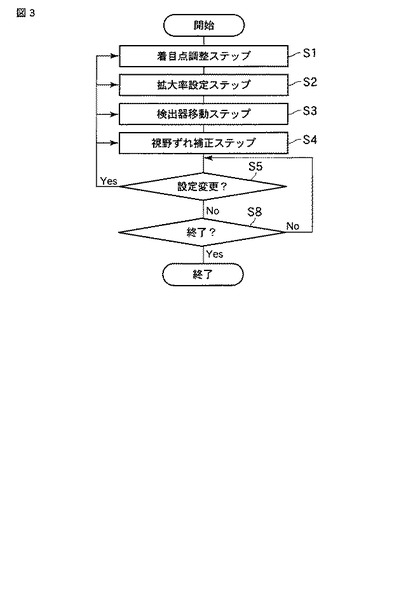
次に、着目点Aの高さが未知の場合の処理手順について図4に示す。この処理手順は、着目点Aの高さが既知の場合の図3に示す処理手順に着目点修正判定ステップS6と着目点修正ステップS7を追加したものである。従って、図4において、図3と同じ処理を行うステップについては、図3と同じステップ番号を付して説明する。
【0064】
また、ステップS6において、着目点修正ありと判定されない限り、図4に示す着目点の高さが未知の場合の処理手順は図3に示す高さが既知の場合の処理手順と同じである。ただし、着目点Aの高さが未知の場合は、「着目点Aまでの既知高さh」の代わりに、「設定着目点Asまでの推定高さh」を入力する。
【0065】
先ず、操作者は、X線検出器4の検出面4aの中心DがX線焦点Fの真下に位置するように設定し、垂直方向(α=0°)からの透視像を取得可能とした後、X線源1を励起し、当該X線源1からのX線ビームを被検体3に向けて照射する。この状態においては、X線検出器4で検出されたX線透過像がデータ処理部5の表示部19に表示される。
【0066】
操作者は、表示部19に表示されたリアルタイムな透過像を観察しながら、入力部17からxt,yt移動制御指令(xuser、yuser)を入力し、着目点AがX線光軸7上に一致するようにテーブル移動機構8を移動させる。すなわち、着目点Aが透過像の中央に来るようにテーブル2を移動制御する(着目点調整ステップS1)。
【0067】
引き続き、操作者は、入力部17よりテーブル面2a(基準の面)から着目点Aまでの推定高さhを入力設定した後、zt移動制御指令(zuser)を入力する。
【0068】
ここで、入力部17から推定高さh及びzt移動制御指令(zuser)が入力されると、データ演算処理部11は、テーブル2の上下動位置を設定した後、拡大率設定プログラム15aに基づき、前述した式(1)に基づいて透過像の拡大率(検査倍率)Mを算出して設定する(拡大率設定ステップS2)。また、他の方法としては、操作者が入力した拡大率Mを設定し、式(1)’と式(1)”で計算されるztにテーブル2の上下動位置を設定する(ステップS2)。
【0069】
さらに、操作者は、入力部17から検出器移動制御指令を入力し、あるいは傾斜角度αを直接入力し、検出器移動機構6を介してX線検出器4を移動させ、X線光軸7の傾斜角度(透視角度)αを変える(検出器移動ステップS3)。
【0070】
そして、X線検出器4を移動させた後、前述した傾斜角度α、拡大率M及び高さhを用いて、視野ずれ補正プログラム15bを実行し、前述した式(2)〜式(4)に従ってテーブル移動量xt,yt,ztを求めた後、テーブル2を移動させる(視野ずれ補正ステップS4)。
【0071】
さらに、データ演算処理部11は、設定変更判定ステップS5にて、操作者が設定した値に変更があったか否かを判定する。変更がなかったと判定された場合には着目点修正判定ステップS6に進む。ここで、修正指令がなかった場合、終了判定ステップS8に進み、終了指令が有った場合には終了し、終了指令が無かった場合には設定変更判定ステップS5にもどる。
【0072】
この設定変更判定ステップS5において、操作者が直接的あるいは間接的に設定する値xuser、yuser、zuser、α、(M)、hの何れか1つ以上に変更があった場合(zuserとMは互いに従属)、データ演算処理部11は、着目点Aの高さhが既知の場合と同様にステップS1ないしステップS4の何れかに後退し、その後退ステップから再度処理を始める。
【0073】
高さhが既知の場合と同様に設定変更判定ステップS5で設定変更があるたびにステップを後退し、またステップS5にもどるループを繰り返すが、変更を小刻みに少しずつ変更(例えばジョブ入力)すれば、これら一連の移動制御は、計算時間が短いので、ほぼリアルタイムに位置変更し、連続的に視野ずれなしでX線透過像を取得することができる。
【0074】
従って、以上のような実施の形態によれば、推定高さhが真の高さhtrueに等しいなら、被検体3の任意の座標位置及び任意の未知の高さに応じた着目点Aの透過像を、任意の拡大率M及び任意の傾斜角度αでもって視野ずれなく取得できる。
【0075】
よって、本発明によるX線透視検査装置は、推定高さhが真の高さhtrueに等しいなら、操作者がα、M(またはzuser),hがどのような状態のときでも、xt,yt移動制御指令(xuser、yuser)を変更しつつ自由に視野変更でき、また、zt移動制御指令zuser(またはM),α、hを自由に変更しつつ視野ずれなしの状態に設定できる。
【0076】
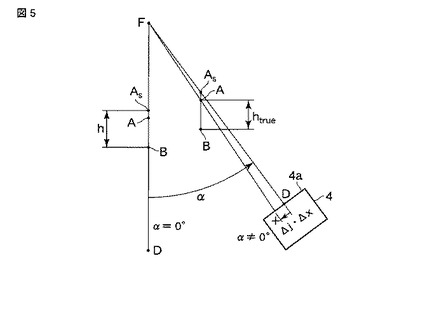
しかし、一般に、推定高さhは真の高さhtrueと異なるので、垂直透視の際に着目点Aを視野中央位置に合わせたとしても、テーブル2及びX線検出器4を移動させて傾斜させたとき、図5に示すように推定高さhに基づく設定着目点Asとテーブル面2aからの真の高さhtrueに基づく着目点Aとの間にずれ量が生じる。
【0077】
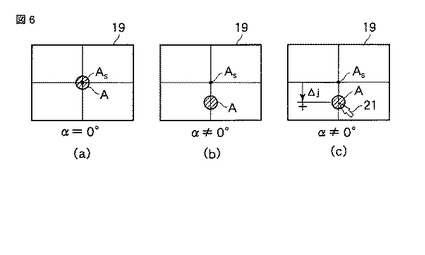
すなわち、設定着目点Asの推定高さをh(入力値)、被検体3中の実際の着目点Aの高さをhtrue(未知値)とすれば、2つの着目点AsとAとの間にずれが生じると、図6に示すような透過像が現れる。つまり、α=0°のとき、操作者が被検体3の設定着目点AsとX線光軸11とを一致するように合わせるので、図6(a)に示すように、着目点Aの透過像と推定高さhに基づく設定着目点Asとが視野中央(画面中央)に存在する。その後、αを増やしてα≠0°としたとき、図6(b)に示すように、着目点Aの透過像が視野中央からずれてくる。
【0078】
そこで、αを増やすほど着目点Aの透過像のずれが大きくなるので、操作者は、着目点Aの透過像が視野からはみ出す前の傾斜角度αにて、入力部17のマウスなどを用いて、図6(c)に示すように、着目点Aにカーソル21を合わせてダブルクリックし、位置指定データを入力する。
【0079】
なお、図4に示す処理手順において、着目点修正判定ステップS6を実行するとき、入力部17からの位置指定データΔj(画素単位)が入力されていると、データ演算処理部11は、修正要求有りと判定し(S6)、着目点修正ステップS7を実行する。
【0080】
データ演算処理部11は、着目点修正ステップS7において、入力部17から入力された指定位置Δj(画素単位)を用いて、着目点高さ修正プログラム15cを実行し、下記式に従って、推定高さhと着目点Aの透過像のずれ量Δjとに基づいて、テーブル面2aから着目点Aまでの真の高さhtrueを計算する(着目点高さ修正ステップS7)。
htrue=h−Δj・Δx/(M・sin(α)) ……(11)
ここで、Δxは検出面4a上の1画素サイズ(mm)である。
【0081】
引き続き、データ演算処理部11は、視野ずれ補正ステップS4に後退し、推定高さhのかわりに計算された着目点Aまでの真の高さhtrueを使用し、視野ずれ補正プログラム15bを用いて、視野ずれを補正する。すなわち、前記式(2)〜式(4)によるテーブル移動量xt,yt,ztを求める。そして、求めたテーブル移動量xt,yt,ztに従ってテーブル2を移動させる(S4)。
【0082】
ここで、視野ずれ補正ステップS4が終了すると、ステップS5に進み、設定変更判定ステップS5、着目点修正判定ステップS6、終了判定ステップS8を繰り返すループに入り、設定変更、着目点修正、終了の何れかの指令を待つ状態となる。
【0083】
αを増やすほど、着目点Aの透過像のずれが大きくなるので、αが大きいほどステップS7で真の高さhtrueが正確に求まる。
【0084】
そこで、操作者はαを増やすにつれ、逐次,着目点Aの透過像が視野からはみ出す前に着目点Aにカーソル21を合わせてダブりクリックし、着目点修正指令となる位置指定データを入力することで、着目点修正ステップS7にて順次大きなαとし、真の高さhtrueを正確にすることができる。
【0085】
これにより、高さhは基準の面からの真の高さhtrueとなったので、着目点Aの透過像を視野中央に合わせることができ、以降、拡大率Mや傾斜角度αを変更しても、視野ずれをなくすことができる。
【0086】
従って、以上のような実施の形態によれば、被検体3の着目点の高さが未知であって、かつ、X線源1のX線光軸が垂直方向(基準の方向)から傾斜したとき、透過像上の着目点のずれ量を入力するだけで、自動的に着目点の高さを求めて修正するので、確実に視野ずれを補正することができる。
【0087】
また、テーブル面2a(基準の面)から被検体3の着目点Aまでの真の高さhtrueが得られることにより、その後、拡大率Mや傾斜角度αを変更しても、視野ずれが生じることがなくなる。
【0088】
よって、本発明によるX線透視検査装置は、着目点Aの高さが未知の場合でも、真の高さhtrueが得られることにより、操作者がα,M(またはzuser)がどのような状態のときでも、xt,yt移動制御指令(xuser、yuser)を変更しつつ自由に視野変更でき、また、zt移動制御指令(zuserまたはM)、αを自由に変更しつつ視野ずれなしの状態に設定できる。
【0089】
(他の実施の形態)
(1) 上記実施の形態では、着目点の高さh、推定高さh、また、真の高さhtrueはテーブル面4aから測った高さとしている。これは必ずしもテーブル面4aを基準とする必要はなく、テーブル面に平行でテーブル2と一緒に移動する面であれば、任意の面を基準面として設定できる。
【0090】
また、傾斜角度αは、テーブル面4aの法線方向を基準として測っているが、これも必ずしも法線方向でなくても、基準の方向は任意に設定できる。
【0091】
(2) 上記実施の形態では、推定高さhに基づく設定着目点Asとテーブル面2aからの真の高さhtrueに基づく着目点Aとの間にずれが生じたとき、操作者が着目点Aにカーソル21を当てて位置指定入力すれば、データ処理部5は、当該着目点Aが画面中央の設定着目点Asに位置するようにテーブル2を移動させることにより、高さ修正を行う構成である。
【0092】
これに対し、操作者は、前述した操作の代わりに、例えば表示部19に表示される透過像を観察しながら、着目点Aの高さhを少しずつ変更し、視野ずれ補正ステップS4を実行して、前記式(2)〜式(4)に基づくテーブル移動量xt,yt,ztの計算処理を繰り返し実行することにより、着目点Aが画面中央に来るように制御してもよい。この場合には、若干時間がかかるが、着目点Aを画面中央に設定できると同時に着目点Aの高さhを真値に設定できる。
【0093】
(3) 上記実施の形態では、垂直方向からX線光軸を傾斜させるために、X線検出器4を移動させているが、例えばX線源1とX線検出器4とを両方を移動させるとか、あるいはX線源1のみを移動させる構成であってもよい。このような移動制御の場合には、テーブル2の移動量xt,yt,ztの具体的な計算式は、前述した式(5)〜式(10)とは異なったものとなる。
【0094】
(4) 上記実施の形態では、テーブル面2aから着目点Aまでの真の高さhtrueを式(11)を用いて計算しているが、この式(11)は近似式である。厳密解を得る場合には、
ε=arctan(Δj・Δx/L)
htrue=h−L・sin(ε)/(M・sin(α−ε)) ……(11)’
なる演算式を用いて、真の高さhtrueを求める。なお、(Δj・Δx/L)≪1のとき、式(11)’は式(11)で近似できるが、誤差を極力少なくする場合には、式(11)’を用いて求めるのが好ましい。
【0095】
(5) 上記実施の形態では、着目点高さ修正プログラム15cは、α=0°での着目点Aの透過像を起点とし、推定高さhと着目点Aの透過像のずれ量から着目点Aの真の高さhtrueを求めているが、例えば任意の傾斜角度αをずれの起点とすることもできる。
【0096】
この場合は、処理手順は図4と同じであるが、着目点高さ修正プログラム15cが変更される結果、図4のステップS1とステップS7の処理のみが異なる。以下、ステップS1,ステップS7の処理について説明する。
【0097】
ステップS1:操作者は入力部17からxt,yt移動制御指令(xuser、yuser)を入力し、被検体3の着目点Aが透過像の中央に来るようにテーブル2を移動制御することで、当該着目点AがX線光軸7上に一致するようにする。このとき、データ演算処理部11は、xuser,yuserが変更設定された後、このときの傾斜角度αをずれ起点の傾斜角度αaとする。
αa=xuser,yuser変更時点でのα ……(12)
ここで、初回のステップS1ではα=0°であるが、ステップS3にてX線検出器4の移動に伴って傾斜角度αが変更された後、ステップS5でxuser,yuserの変更要求があるとステップS1に戻るが、このときにはαは0°ではない。
【0098】
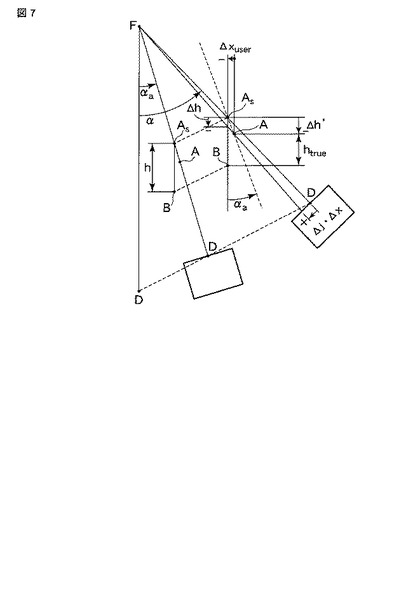
ステップS7:ここでは、データ演算処理部11は、着目点高さ修正プログラム15cを実行し、着目点Aの真の高さhtrue及びxuserの補正量Δxuserを求めるものであって、図7を参照して説明する。なお、同図において図5と同一符号の場合には図5と同じ意味・機能を有するものとする。
【0099】
今、ずれ起点の傾斜角度をαaとすると、この傾斜角度αaでは、着目点Aは、X線光軸上にあるが、一般にステップS2で入力される推定高さhから定まる設定着目点Asとは一致していない。
【0100】
これにより、傾斜角度をαに変更したとき、設定着目点Asは視野中央に来るように視野補正されるが、着目点Aはずれ量Δjを生じる。そこで、操作者は、前述した実施の形態と同じ要領で、入力部17のマウスなどを用いて、透過像上の着目点Aにカーソル21を合わせてダブリクリックし、ずれ量Δjを入力する。
【0101】
この入力されたずれ量Δjから図7を用いて幾何計算すれば、着目点Aの真の高さhtrue及びxuserの補正量Δxuserを求めることができる。
【0102】
具体的には、着目点高さ修正プログラム15cを用いて、下式に従って真の高さhtrue及び補正量Δxuserを求める。
ε=arctan(Δj・Δx/L)
Δh=−L・sin(ε)/(M・sin(α−ε))
Δh´=Δh・tan(α−ε)/{tan(α−ε)−tan(αa)}
htrue=h+Δh’ ……(11)”
Δxuser=Δh’・tan(αa) ……(13)
引き続き、データ演算処理部11は、推定高さhの代わりにhtrueを用い、xuserを補正量Δxuserだけ自動変更し、ステップS4に後退して視野ずれ補正プログラム15bに従って視野ずれを補正する。
【0103】
この実施の形態によれば、αa=0°で着目点調整を行う場合は上記実施の形態(他の実施の形態(4)を含む)と全く同様の作用・効果を奏する。これは、αa=0°の場合、式(11)”は式(11)’に一致し、式(13)はΔxuser=0と成ることより分る。
【0104】
さらに、この実施の形態によれば、任意の傾斜角度αaで着目点調整を行った場合でも、このとき調整された着目点Aの透過像を起点としたずれ量Δjを入力することにより、着目点高さを自動修正できる追加的な効果を奏する。
【0105】
(6) この実施の形態では、テーブル移動機構8としては、テーブル2を直交する3方向であるxt,yt,ztに平行移動させる機能(上記実施の形態)の他、テーブル面2aに沿った回転を行う機能を追加し、また、入力される移動制御指令xuser,yuserに従った着目点移動のみを行う専用機能を追加している。
【0106】
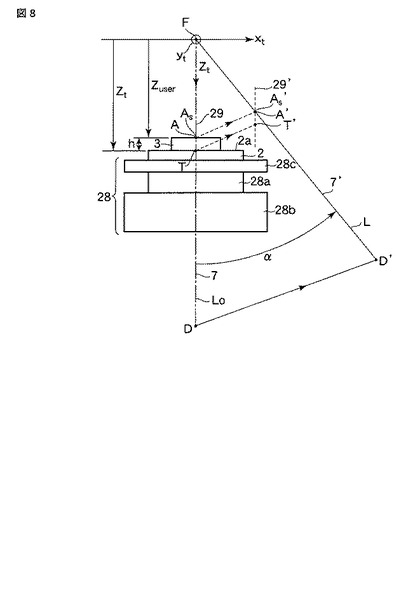
図8は本実施の形態における概念構成図である。なお、同図において、図1と同一符号を付した部分は図1と同じ意味・機能を有するものであり、また重複部分は一部省略記載している。特に本実施の形態においては、テーブル移動機構28とそのテーブル移動制御に関する部分が変更となる。
【0107】
テーブル移動機構28は、テーブル面2aの垂線である回転軸29に対し、テーブル2を回転角φ回転させる回転機構28aと、テーブル2を回転軸29とともにxt,yt,zt方向に移動させるxt−yt−zt機構28bと、回転軸29に対し、テーブル2をxt,yt方向に移動させるxuser−yuser機構28cとから成る。
【0108】
ここで、テーブル面2aと回転軸29の交点をTとすると、xt−yt−zt機構28bの移動量xt,yt,ztは、X線焦点Fから計測されたT点の座標を表すように較正されているものとする。また、傾斜角度α=0°において、回転軸29はX線光軸7に一致し、回転軸29上のT点から高さhの点に設定着目点Asが位置している。
【0109】
視野ずれ補正は点Asが視野中央からずれないように行われるので、回転軸29に対するテーブル面2aに沿った回転(傾斜方位φの変更)は常に視野中心の点Asを中心に行われる。
【0110】
そして、xuser−yuser機構28cは、データ演算処理部11から送られてくる入力部17から入力されたxt,yt移動制御指令xuser,yuserを受け取り、設定着目点Asの位置に所望の着目点Aを合わせるようにテーブル2を移動制御する。このときのテーブル移動量はxuser,yuserとする。
【0111】
前記データ処理部11の作用としては、他の実施の形態(5)と少し異なるので、その異なる部分のみを説明する。処理手順としては、図4と同じであるが、ステップS1とステップS4とステップS5の処理内容のみが若干異なる。
【0112】
ステップS1:操作者は入力部17からxuser,yuser,回転角φを入力し、着目点Aが透過像の中央に来るように調整する。このとき、データ演算処理部11は、xuser,yuser,φが変更設定された後、このときの傾斜角度αをずれ起点の傾斜角度αaとする。
αa=xuser,yuser又は回転角φ変更時点でのα ……(12)’
また、ここで、xuser,yuser,回転角φの設定変更については、xuser−yuser機構28c及び回転機構28aによって移動される。
【0113】
ステップS4:データ演算処理部11は、視野ずれ補正プログラム15bを実行するが、前記式(2),式(3)の代わりに、下記演算式に従ってテーブル移動量を求める。
xt=x(α,M)+x(h) ……(2)’
yt=y(α,M)+y(h) ……(3)’
その他は上記他の実施の形態(5)と同じである。
【0114】
ステップS5:上記他の実施の形態(5)に加え、回転角φの変更があった場合にはステップS1に後退する。
【0115】
この実施の形態によれば、他の実施の形態(5)の作用,効果に加え、任意時点で視野中心の設定着目点As中心に透過像の傾斜透視における回転角φ(傾斜方位)を変更することができる。また、この回転角φを変更したとき、ずれの起点の傾斜角度αaが変更されるので、回転角φを変更しても真の着目点の高さhtrueが正しく得られる。
【0116】
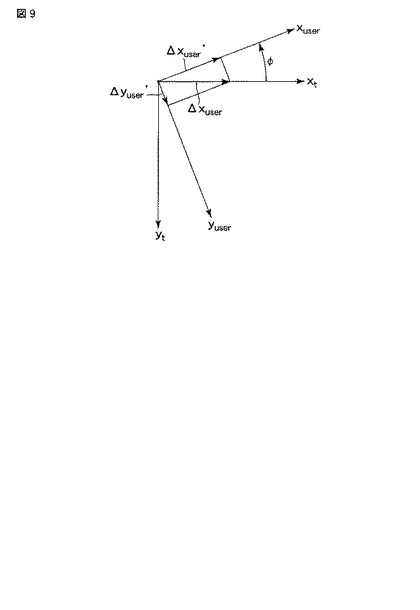
(7) 他の実施の形態(6)では、xuser−yuser機構28cは、回転角φが変化しても、着目点移動制御指令xuser及びyuserの方向がそれぞれxt,ytの方向から変化しないような機構としているが、回転角φの回転によって変化する機構であってもよい。
【0117】
すなわち、本実施の形態におけるデータ演算処理部11は、ステップS7でΔxuserを計算した後、xuserをΔxuserだけ自動変更する代わりに、図9に示すように、次の演算式に従って、
Δxuser’=Δxuser・cos(φ) (14)
Δyuser’=Δxuser・sin(φ) (15)
を計算した後、機構制御部18を介して移動制御指令をxuser−yuser機構28cに送出する。xuser−yuser機構28cは、xuserをΔxuser’だけ、yuserをΔyuser’だけテーブル2を自動変更する。
【0118】
この実施の形態によれば、他の実施の形態(6)と同様の効果を奏する他、被検体3の回転に合わせて着目点移動制御指令xuser,yuserの方向を回転できる。つまり、被検体4が回転しても、着目点移動制御指令を被検体基準の座標で行うことができる。
【0119】
その他、本発明は、上記実施の形態に限定されるものでなく、その要旨を逸脱しない範囲で種々変形して実施できる。
【図面の簡単な説明】
【0120】
【図1】本発明に係るX線透視検査装置の一実施の形態を説明する概念構成図。
【図2】図1に示すデータ処理部のハードウェア構成を示す図。
【図3】着目点の高さが既知の場合におけるX線透視検査方法の処理手順を説明する図。
【図4】着目点の高さが未知の場合におけるX線透視検査方法の処理手順を説明する図。
【図5】着目点の設定がずれている場合の幾何的な説明図。
【図6】着目点の設定がずれている場合の着目的の透過像を示す図。
【図7】他の実施の形態(5)における着目点がずれている場合の幾何的な説明図。
【図8】他の実施の形態(6)に係るX線透視検査装置の一部分を示す概念構成図。
【図9】他の実施の形態(7)における着目点調整移動軸の回転を示す幾何的な説明図。
【符号の説明】
【0121】
1…X線源、2…テーブル、2a…テーブル面、3…被検体、4…X線検出器、4a…検出面、5…データ処理部、6…検出器移動機構、7,7´…X線光軸、8…テーブル移動機構、11…データ演算処理部、13…検出器インターフェース、14…メモリ、15…ディスク、17…入力部、18…機構制御部、21…カーソル、28…テーブル移動機構、28a…回転機構、28b…xt−yt−zt機構、28c…xuser−yuser機構。
【技術分野】
【0001】
本発明は、被検体にX線を透過させて被検体内部を非破壊で検査するX線透視検査装置及びX線透視検査方法に係り、特に、電子部品を実装した基板等の板状の被検体を透視角度(傾斜角)を変えて検査するX線透視検査装置及びX線透視検査方法に関する。
【背景技術】
【0002】
電子部品を実装した基板等の被検体に対し、X線を照射し、そのX線透過像から被検体内部の状態を検査するX線透視検査装置は、既に提案されている(特許文献1)。
【0003】
この特許文献によるX線透視検査装置は、X線源とX線検出器とを同時に、あるいはX線検出器のみを旋回させ、X線光軸を、被検体載置用テーブル面の法線から傾斜させることにより、透視角度を変えて被検体を透視し、X線透過像を取得する。
【0004】
このようなX線透視検査装置は、X線検出器等を旋回させて透視角度を変えたとき、テーブルを自動的に水平方向にスライド移動させることにより、X線光軸が被検体の着目点からずれないようにしている。
【0005】
ところで、通常、被検体の着目点は、被検体自体が所要の厚みを持っていることから、テーブル面から所要の高さだけ高位置に存在する。その結果、着目点の高さに応じて、視野ずれ補正用のスライド移動の仕方が変わってくる。
【0006】
そこで、前述したX線透視検査装置では、操作者が予め着目点の高さを被検体の着目点の高さとして入力し、視野ずれが生じないように補正している。
【特許文献1】特開2001−281168号公報(図1参照)
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、以上のようなX線透視検査装置においては、透視角度を変えても、被検体の着目点がX線透過像の視野からずれないようにするためには、テーブル面からの被検体の着目点までの高さを知る必要があり、そのために操作者が被検体の厚み相当分の値を入力している。
【0008】
しかし、テーブル面から被検体の着目点までの高さは、正確には、検査装置が認識する基準面(例えば理想的なテーブル面)からの高さであり、基準面に対する被検体の載置高さが一定でなくなれば、入力された着目点の高さの正確性も疑わしくなる。基準面からの高さは、実際上、テーブル面のたわみ、テーブル面に接触する被検体の表面のたわみ、被検体の表面の凹凸等々の要因によって変化する。その結果、以上のような種々の変化要因がある限り、基準面から着目点までの高さを正確に把握することが難しい。よって、透過像上の着目点のずれによって、視野ずれが生じ易い状況にある。
【0009】
本発明は上記事情に鑑みてなされたもので、被検体の着目点の高さが未知であっても、X線光軸の傾斜時に透過像上の着目点のずれ量から真の高さを計算し修正し、確実に視野ずれをなくすことができるX線透視検査装置及びX線透視検査方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
(1) 上記課題を解決するために、本発明は、テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置であって、X線検出器を移動させる検出器移動機構と、テーブルを3方向に平行移動させるテーブル移動機構と、入力部及びX線検出器で検出された透過像を表示する表示部を有するデータ処理手段とを備え、
前記データ処理手段は、前記入力部より、基準の面から前記着目点までの推定高さを入力する推定高さ入力手段と、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定手段と、前記X線の光軸が基準の方向から所要の傾斜角度となるように前記検出器移動機構を介して前記X線検出器を移動制御する検出器移動制御手段と、前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブル移動機構を介して前記テーブルを移動制御する視野ずれ補正手段と、この視野ずれ補正手段の移動制御によって前記テーブルが移動したとき、前記推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正手段とを設け、この修正手段によって求めた前記着目点の真の高さに基づき、前記視野ずれ補正手段を再度実行する構成である。
【0011】
なお、前記着目点高さ修正手段としては、表示された透過像上のずれ量を伴った着目点を位置指定することにより、着目点の推定高さと位置指定信号とから真の高さを求めるものである。
【0012】
(2) また、本発明は、テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記被検体の着目点が前記表示された透過像の中央にくるように前記テーブルをテーブル面に沿った方向に移動制御する着目点調整ステップと、外部より、基準の面から前記着目点までの推定高さが入力され、かつ、前記テーブルをテーブル面に垂直に移動させたとき、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定ステップと、前記X線の光軸が基準の方向から所要の傾斜角度となるように前記X線検出器を移動制御する検出器移動ステップと、前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブルを移動制御する視野ずれ補正ステップと、この視野ずれ補正ステップの移動制御によって前記テーブルを移動させた後、前記着目点の推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正ステップと、この修正ステップによって求めた前記着目点の真の高さに基づき、前記視野ずれ補正ステップを再度実行し、前記透過像上の前記着目点のずれ量を無くするステップとを有するX線透視検査方法である。
【0013】
なお、前記着目点高さ修正ステップ及び透過像上の前記着目点のずれ量を無くするステップに代えて、外部より、変更された前記着目点の推定高さが入力されるごとに、前記着目点の推定高さのみを変更された値に変更して前記視野ずれ補正ステップを繰り返し実行し、前記透過像上の前記着目点のずれを無くするステップを有するものでもよい。
【発明の効果】
【0014】
本発明によれば、被検体の着目点の高さが未知であっても、X線光軸の傾斜時に透過像上の着目点のずれ量から真の高さを計算し修正するので、確実に視野ずれをなくすことができるX線透視検査装置及びX線透視検査方法を提供できる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施形態について図面を参照して説明する。
図1は本発明に係るX線透視検査装置の一実施の形態を示す概念的な構成図である。
【0016】
同図において、1はX線ビームを発生するX線管などのX線源であって、このX線源1のX線焦点Fから下方に向けて広範囲に発生されたX線ビームの一部は真下に配置されたテーブル2上の被検体3に向けて照射される。
【0017】
4はX線検出器であって、例えば縦横に配列された複数のX線検出素子を有する2次元アレイが採用され、前述するX線ビームの照射のもとに被検体3内部を透過してくるX線透過像を2次元分解能で検出し、データ処理部5に送る。X線検出器4は、データ処理部5からの移動制御指令を受けて動作する検出器移動機構6により、直線状あるいは円弧状に移動される。この移動中、X線検出器4は、検出面4aが常にX線焦点Fと向き合うように自転される。X線検出器4のD点は検出面4aの中心である。
【0018】
従って、X線ビームの照射範囲内で、X線検出器4を移動させるようにすれば、傾斜角度(透視角度)αを変えることができる。ここで、傾斜角度αとは、X線光軸(直線F−D)7とテーブル面2aの法線(基準の方向)とのなす角度である。
【0019】
一方、前記テーブル2は、データ処理部5からの移動制御指令を受けて動作するテーブル移動機構8により、テーブル面2aの向きを変えずに直交する3方向であるxt,yt,ztに平行移動するように位置設定される。xt,ytは互いに直交する水平方向、ztは垂直方向である。
【0020】
以下,xt,yt,ztは、テーブル2の各方向への移動量を表すものとする。また、テーブル面2a上の一点Tは、便宜上の移動基準を示す点であって、移動量xt,yt,ztは、X線焦点Fから計測されたT点の座標を表すように較正されているものとする。
【0021】
データ処理部5は、検出器移動機構6及びテーブル移動機構8に対して移動制御指令を出力するとともに、X線検出器4で検出されたX線透過像を表示する。
【0022】
すなわち、データ処理部5は、通常のコンピュータであって、具体的には図2に示すように、CPU(Central Processing Unit:中央演算ユニット)で構成されるデータ演算処理部11が設けられ、データ演算処理部11からバスライン12が導出されている。このバスライン12には、X線検出器4で検出された透過像データをデータ処理部5にて処理可能なデータに変換する検出器インターフェース13、メモリ14、ディスク15、表示出力インターフェース16、入力部17及び機構制御部18等が接続される。表示出力インターフェース16には表示部19が接続されている。その他、筐体、電源その他必要とする構成体等が設けられているが、発明の要旨とは直接関係ないことから省略する。
【0023】
データ演算処理部11は、検出器インターフェース13を介して、X線検出器4で検出された被検体3の透過像データ(ディジタルデータ)を取り込み、メモリ14あるいはディスク15に格納するとともに、当該透過像データを表示出力インターフェース16を介して表示部19に表示する。
【0024】
また、データ演算処理部11は、所定のプログラムにしたがって少なくとも拡大率設定、視野ずれ補正及び着目点高さ修正処理を実行し、必要に応じて検出器移動機構6及びテーブル移動機構8に移動制御指令を送出する。
【0025】
メモリ14は、データ演算処理部11が高速にランダムアクセスできる揮発性メモリである。
【0026】
ディスク15は、ランダムアクセスできず、かつ、アクセス速度が遅い副メモリである不揮発性メモリであるが、メモリ14よりも相当大きなメモリ容量を持っている。ここで、ランダムアクセスとは、任意の番地からデータを取り出すことを意味する。ディスク15には、少なくとも拡大率設定プログラム15a、視野ずれ補正プログラム15b及び着目点高さ修正プログラム15cが格納され、実行時には読み出され、メモリ14に格納される。
【0027】
拡大率設定プログラム15aは、X線源1と被検体3の着目点Aとの間の距離から決まる透過像の拡大率Mを設定する。視野ずれ補正プログラム15bは、当該拡大率MとX線源1の真下方向である垂直ライン(基準の方向)に対するX線光軸7の傾斜角度αと着目点の高さhとをパラメータとし、被検体3の着目点AがX線の光軸上に位置するように、テーブル2の移動位置を計算し、機構制御部18を通して移動制御指令をテーブル移動機構8に送出し、テーブル2を平行移動させることにより、視野ずれの補正を行う。
【0028】
着目点高さ修正プログラム15cは、X線の光軸7がX線管1の真下方向である垂直ラインから傾斜したときの透過像の上の着目点Aのずれ量に基づき、テーブル2からの着目点Aの修正された真の高さhを計算するプログラムである。
【0029】
表示出力インターフェース16は、例えば画像メモリや表示制御機能を有し、データ演算処理部11で取り込まれた被検体3の透過像データを画像メモリ等に格納し、表示制御機能に基づいて表示部19に表示する。
【0030】
入力部17は、操作者が必要なデータを入力したり、各種の制御指示を入力する機能を有するものであって、キーボード、マウス、トラックボール、ジョイスティック、タッチパッドなどが挙げられる。
【0031】
機構制御部18は、データ演算処理部11による演算結果に基づき、必要に応じて移動制御指令を出力し、検出器移動機構6及びテーブル移動機構8を移動制御する。
【0032】
次に、以上のように構成されたX線透視検査装置の作用について図3及び図4を参照して説明する。
【0033】
(1) 着目点Aの高さが既知の場合について(図3参照)。
【0034】
先ず、操作者は、X線検出器4の検出面4aの中心DがX線焦点Fの真下に位置するように設定し、垂直方向(α=0°)からの透過像を取得可能とした後、X線源1を励起し、当該X線源1からのX線ビームを被検体3に向けて照射する。この状態においては、X線検出器4で検出されたX線透過像がデータ処理部5の表示部19に表示される。
【0035】
操作者は、表示部19に表示されたリアルタイムな透過像を観察しながら、入力部17からxt,yt移動制御指令(xuser、yuser)を入力し、被検体3の着目点AがX線光軸7上に一致するようにテーブル移動機構8を移動させる。すなわち、着目点Aが透過像の中央に来るようにテーブル2を移動制御する(着目点調整ステップS1)。このとき、図1に示す点Bは着目点直下のテーブル面上の点である。
【0036】
引き続き、操作者は、入力部17からテーブル面2a(基準の面)から被検体3の着目点Aまでの既知高さhを入力設定した後、zt移動制御指令(zuser)を入力して画像の拡大、縮小の調整を行う。なお、このzt移動制御指令(zuser)は、入力部17のキーボードからの数値入力またはマウスなどを用いてカーソルを微小ステップずつ移動させるジョブ入力してもよい。
【0037】
ここで、入力部17から高さh及びzt移動制御指令(zuser)が入力されると、データ演算処理部11は、zt移動制御指令に従ってテーブル移動機構8を通してテーブル2の上下移動位置を設定する。ここで、zuserは、α=0°において、テーブル2の現在位置ztに対して、zuser=zt−hで定量される量であり、zuserはα=0°におけるX線焦点Fと着目点Aとの間の距離である。そして、データ演算処理部11は、拡大率設定プログラム15aに基づき、下記の演算式に基づいて透過像の拡大率(検査倍率)Mを算出して設定する(拡大率設定ステップS2)。
M=L0/zuser ……(1)
但し、L0は、α=0°におけるF−D間の距離である。ここで、拡大率MはX線源1(X線焦点F)とX線検出器4(検出面4aの中心D)との間の距離とX線源1(X線焦点F)と着目点Aとの間の距離との比である。
【0038】
なお、拡大率設定ステップS2では、ztとhとの入力から拡大率Mとzuserとを算出して設定したが、操作者がhとzuserとを入力し、ここから式(1)でMを算出して設定するようにしてもよい(拡大率設定ステップS2)。
【0039】
また、操作者がhとMとを入力し、拡大率設定プログラム15aが下式に基づいてztを求めた後、この求めたztに基づいてテーブル2を設定するようにしてもよい。
【0040】
zuser=L0/M …(1)’
zt(α=0°)=zuser+h …(1)”
この場合は、拡大率Mは操作者の入力した値に設定される(拡大率設定ステップS2)。この拡大率設定ステップS2においては、Mとzuserとは互いに従属で、どちらか一方が設定されれば他方は自動的に決まる関係にある。
【0041】
拡大率設定ステップS2に続き、操作者は、入力部17から検出器移動制御指令を入力し、あるいは傾斜角度αを直接入力し、検出器移動機構6を介してX線検出器4を移動させ、垂直ラインに対してX線光軸7の傾斜角度(透視角度)αを変える(検出器移動ステップS3)。このとき、データ演算処理部11は、αの値として、検出器移動位置から計算した値、あるいは操作者からの入力値をαの値とする。
【0042】
そして、X線検出器4が移動したとき、データ演算処理部11は、前述した傾斜角度α、拡大率M及び高さhを用いて、視野ずれ補正プログラム15bを実行し、下記の演算式に従ってテーブル移動量xt,yt,ztを求める。
xt=xuser+x(α,M)+x(h) ……(2)
yt=yuser+y(α,M)+y(h) ……(3)
zt=zuser+z(α,M)+z(h) ……(4)
上式において、
xuser,yuser,zuser:視野・拡大率設定項、
x(α,M),y(α,M),z(α,M):α,M視野ずれ補正項、
x(h)、y(h)、z(h):h視野ずれ補正項である。
【0043】
xuser,yuser,zuserは、視野・拡大率設定項であって、操作者が移動制御指令の下に適宜に直接的あるいは間接的に入力設定する値である。他の項の引数であるα,M,hは、同様に操作者が直接的あるいは間接的に設定する値である。α,M視野ずれ補正項とh視野ずれ補正項は視野ずれ補正プログラム15bがα,M,hの関数として自動的に決める項であって、図1に示す幾何においては、具体的には次のように決定される。
【0044】
x(α,M)=(L/M)・sinα ……(5)
y(α,M)=0(関係せず) ……(6)
z(α,M)=(L・conα−L0)/M …(7)
x(h)=0(関係せず) ……(8)
y(h)=0(関係せず) ……(9)
z(h)=h ……(10)
ここで、Lは傾斜角度α時のF−D間距離であって、一般にはαの関数である。
【0045】
データ演算処理部11は、前記式(2)〜式(4)に基づき、テーブル移動量xt,yt,ztを求めた後、機構制御部18からテーブル移動制御指令を出力し、テーブル移動機構8を介して前述したテーブル移動量xt,yt,ztに基づいてテーブル2を移動させることにより、視野ずれを補正する(視野ずれ補正ステップS4)。
【0046】
この視野ずれ補正ステップS4により、拡大率Mを一定に保ったまま、視野ずれを起こさずに傾斜角度αを変えることができる。
【0047】
さらに、データ演算処理部11は、操作者が設定する値に変更が有ったか否かを判定する(設定変更判定ステップS5)。変更が無かった場合には、終了指令が有ったか否かを判断し(終了ステップS8)、終了指令が有れば終了し、終了指令が無かった場合にはステップS5にもどる。
【0048】
ステップS5において、操作者が直接的または間接的に設定する値xuser,yuser,zuser,α,M,hの何れか1つ以上に変更があった場合(zuserとMは互いに従属)、データ演算処理部11は、ステップS1ないしステップS4の何れかに後退し、そこから再度同様の処理を繰り返す。
【0049】
どのステップに後退するかは変更されたパラメータに依存する。
【0050】
ステップS5では、少なくともxuser,yuserのどちらかが変更された場合は、着目点調整ステップS1に後退し、前述したように入力部17からxt,yt移動制御指令(xuser,yuser)を入力し、変更された被検体3の着目点Aが光軸7上に一致するようにテーブル2を移動させる(ステップS1)。この場合、一般に、αが0°でない状態でテーブル2の移動が行われる。
【0051】
ステップS1が終了した後、順次ステップS2,S3,S4を行い、ステップS5にもどる。但し、xuser,yuser以外の変更が無い場合にはステップS2,S3,S4では何も変更されない。
【0052】
ステップS5において、xuser,yuserに変更がなく、少なくともzuser(またはM)に変更があった場合にはステップS2に後退し、前述したように拡大率設定プログラム15aに基づき、前記式(1)によりMを計算し、設定し直す。Mが変更された場合には当該Mを設定値とするとともに、前記式(1)’でzuserを計算し直す。この場合、ステップS2では、一般にαが0°でない状態で設定される。
【0053】
ステップS2が終了した後、順次、ステップS3,S4を行ってステップS5にもどる。但し、αに変更がない場合、ステップS3では何も変更されない。
【0054】
ステップS5において、傾斜角度α、あるいは傾斜角度αと着目点高さhに変更があった場合、ステップS3に後退し、前述したように操作者によって検出器移動指令を入力し、検出器移動機構6を介してX線検出器4を移動させ、傾斜角度αを変える。そして、ステップS4、S5に進む。
【0055】
ステップS5において、着目点高さhのみに変更があった場合、ステップS4に移行し、前述したように視野ずれ補正プログラム15bに基づき、式(2)〜式(4)によりテーブル移動量xt,yt,ztを求め、テーブル移動機構8を介してテーブル2を移動させる。そして、ステップS4による処理終了後、ステップS5に移行する。
【0056】
以上のようにしてステップS5で変更があった場合には、変更内容に応じて前段のどれかのステップに後退し、各ステップを順次実行しながら再びステップS5にもどる。このループにおいては、変更内容に応じて後退するステップを変えているが、すべてステップS1にもどる流れであってもよい。この場合、変更に関係しないステップは何ら変更されずに空動作となるので、スキップするのと同様な処理となる。
【0057】
各ステップが関係する変更パラメータは、それぞれ
着目点調整ステップS1はxuser,yuser、
拡大率設定ステップS2はzuser,M 、
検出器移動ステップS3はα、
視野ずれ補正ステップS4はすべてのパラメータであり、この関係するパラメータ以外のパラメータに対しては各ステップとも空動作となる。
【0058】
また、ステップS5から後退し、再度ステップS5に進んでくるループでは、変更されなかったパラメータは常に一定に保たれる。例えばzuser(あるいはM)を変えなければ、拡大率は一定であり、また、xuser,yuser、hを変えなければ被検体3中の着目点は一定である。
【0059】
以上のように設定変更判定ステップS5にて設定変更があるたびに、前のステップに後退し、再度ステップS5に進んでくるループを繰り返してくるが、例えば変更を小刻みに少しずつ変更するループを繰り返せば、これら一連の移動制御は、計算時間が短いので、ほぼリアルタイムに位置変更し、連続的に視野ずれなしでX線透過像を取得することができる。
【0060】
従って、以上のような実施の形態によれば、被検体3の任意の座標位置及び任意の既知の高さに応じた着目点Aの透過像を、任意の拡大率M及び任意の傾斜角度αでもって視野ずれなく取得できる。
【0061】
よって、本発明によるX線透視検査装置は、操作者がα、M(またはzuser),hがどのような状態のときでも、xt,yt移動制御指令(xuser、yuser)を変更しつつ自由に視野変更でき、また、zt移動制御指令zuser(またはM),α、hを自由に変更しつつ視野ずれなしの状態に設定できる。
【0062】
(2) 着目点Aの高さが未知の場合について(図4参照)。
【0063】
次に、着目点Aの高さが未知の場合の処理手順について図4に示す。この処理手順は、着目点Aの高さが既知の場合の図3に示す処理手順に着目点修正判定ステップS6と着目点修正ステップS7を追加したものである。従って、図4において、図3と同じ処理を行うステップについては、図3と同じステップ番号を付して説明する。
【0064】
また、ステップS6において、着目点修正ありと判定されない限り、図4に示す着目点の高さが未知の場合の処理手順は図3に示す高さが既知の場合の処理手順と同じである。ただし、着目点Aの高さが未知の場合は、「着目点Aまでの既知高さh」の代わりに、「設定着目点Asまでの推定高さh」を入力する。
【0065】
先ず、操作者は、X線検出器4の検出面4aの中心DがX線焦点Fの真下に位置するように設定し、垂直方向(α=0°)からの透視像を取得可能とした後、X線源1を励起し、当該X線源1からのX線ビームを被検体3に向けて照射する。この状態においては、X線検出器4で検出されたX線透過像がデータ処理部5の表示部19に表示される。
【0066】
操作者は、表示部19に表示されたリアルタイムな透過像を観察しながら、入力部17からxt,yt移動制御指令(xuser、yuser)を入力し、着目点AがX線光軸7上に一致するようにテーブル移動機構8を移動させる。すなわち、着目点Aが透過像の中央に来るようにテーブル2を移動制御する(着目点調整ステップS1)。
【0067】
引き続き、操作者は、入力部17よりテーブル面2a(基準の面)から着目点Aまでの推定高さhを入力設定した後、zt移動制御指令(zuser)を入力する。
【0068】
ここで、入力部17から推定高さh及びzt移動制御指令(zuser)が入力されると、データ演算処理部11は、テーブル2の上下動位置を設定した後、拡大率設定プログラム15aに基づき、前述した式(1)に基づいて透過像の拡大率(検査倍率)Mを算出して設定する(拡大率設定ステップS2)。また、他の方法としては、操作者が入力した拡大率Mを設定し、式(1)’と式(1)”で計算されるztにテーブル2の上下動位置を設定する(ステップS2)。
【0069】
さらに、操作者は、入力部17から検出器移動制御指令を入力し、あるいは傾斜角度αを直接入力し、検出器移動機構6を介してX線検出器4を移動させ、X線光軸7の傾斜角度(透視角度)αを変える(検出器移動ステップS3)。
【0070】
そして、X線検出器4を移動させた後、前述した傾斜角度α、拡大率M及び高さhを用いて、視野ずれ補正プログラム15bを実行し、前述した式(2)〜式(4)に従ってテーブル移動量xt,yt,ztを求めた後、テーブル2を移動させる(視野ずれ補正ステップS4)。
【0071】
さらに、データ演算処理部11は、設定変更判定ステップS5にて、操作者が設定した値に変更があったか否かを判定する。変更がなかったと判定された場合には着目点修正判定ステップS6に進む。ここで、修正指令がなかった場合、終了判定ステップS8に進み、終了指令が有った場合には終了し、終了指令が無かった場合には設定変更判定ステップS5にもどる。
【0072】
この設定変更判定ステップS5において、操作者が直接的あるいは間接的に設定する値xuser、yuser、zuser、α、(M)、hの何れか1つ以上に変更があった場合(zuserとMは互いに従属)、データ演算処理部11は、着目点Aの高さhが既知の場合と同様にステップS1ないしステップS4の何れかに後退し、その後退ステップから再度処理を始める。
【0073】
高さhが既知の場合と同様に設定変更判定ステップS5で設定変更があるたびにステップを後退し、またステップS5にもどるループを繰り返すが、変更を小刻みに少しずつ変更(例えばジョブ入力)すれば、これら一連の移動制御は、計算時間が短いので、ほぼリアルタイムに位置変更し、連続的に視野ずれなしでX線透過像を取得することができる。
【0074】
従って、以上のような実施の形態によれば、推定高さhが真の高さhtrueに等しいなら、被検体3の任意の座標位置及び任意の未知の高さに応じた着目点Aの透過像を、任意の拡大率M及び任意の傾斜角度αでもって視野ずれなく取得できる。
【0075】
よって、本発明によるX線透視検査装置は、推定高さhが真の高さhtrueに等しいなら、操作者がα、M(またはzuser),hがどのような状態のときでも、xt,yt移動制御指令(xuser、yuser)を変更しつつ自由に視野変更でき、また、zt移動制御指令zuser(またはM),α、hを自由に変更しつつ視野ずれなしの状態に設定できる。
【0076】
しかし、一般に、推定高さhは真の高さhtrueと異なるので、垂直透視の際に着目点Aを視野中央位置に合わせたとしても、テーブル2及びX線検出器4を移動させて傾斜させたとき、図5に示すように推定高さhに基づく設定着目点Asとテーブル面2aからの真の高さhtrueに基づく着目点Aとの間にずれ量が生じる。
【0077】
すなわち、設定着目点Asの推定高さをh(入力値)、被検体3中の実際の着目点Aの高さをhtrue(未知値)とすれば、2つの着目点AsとAとの間にずれが生じると、図6に示すような透過像が現れる。つまり、α=0°のとき、操作者が被検体3の設定着目点AsとX線光軸11とを一致するように合わせるので、図6(a)に示すように、着目点Aの透過像と推定高さhに基づく設定着目点Asとが視野中央(画面中央)に存在する。その後、αを増やしてα≠0°としたとき、図6(b)に示すように、着目点Aの透過像が視野中央からずれてくる。
【0078】
そこで、αを増やすほど着目点Aの透過像のずれが大きくなるので、操作者は、着目点Aの透過像が視野からはみ出す前の傾斜角度αにて、入力部17のマウスなどを用いて、図6(c)に示すように、着目点Aにカーソル21を合わせてダブルクリックし、位置指定データを入力する。
【0079】
なお、図4に示す処理手順において、着目点修正判定ステップS6を実行するとき、入力部17からの位置指定データΔj(画素単位)が入力されていると、データ演算処理部11は、修正要求有りと判定し(S6)、着目点修正ステップS7を実行する。
【0080】
データ演算処理部11は、着目点修正ステップS7において、入力部17から入力された指定位置Δj(画素単位)を用いて、着目点高さ修正プログラム15cを実行し、下記式に従って、推定高さhと着目点Aの透過像のずれ量Δjとに基づいて、テーブル面2aから着目点Aまでの真の高さhtrueを計算する(着目点高さ修正ステップS7)。
htrue=h−Δj・Δx/(M・sin(α)) ……(11)
ここで、Δxは検出面4a上の1画素サイズ(mm)である。
【0081】
引き続き、データ演算処理部11は、視野ずれ補正ステップS4に後退し、推定高さhのかわりに計算された着目点Aまでの真の高さhtrueを使用し、視野ずれ補正プログラム15bを用いて、視野ずれを補正する。すなわち、前記式(2)〜式(4)によるテーブル移動量xt,yt,ztを求める。そして、求めたテーブル移動量xt,yt,ztに従ってテーブル2を移動させる(S4)。
【0082】
ここで、視野ずれ補正ステップS4が終了すると、ステップS5に進み、設定変更判定ステップS5、着目点修正判定ステップS6、終了判定ステップS8を繰り返すループに入り、設定変更、着目点修正、終了の何れかの指令を待つ状態となる。
【0083】
αを増やすほど、着目点Aの透過像のずれが大きくなるので、αが大きいほどステップS7で真の高さhtrueが正確に求まる。
【0084】
そこで、操作者はαを増やすにつれ、逐次,着目点Aの透過像が視野からはみ出す前に着目点Aにカーソル21を合わせてダブりクリックし、着目点修正指令となる位置指定データを入力することで、着目点修正ステップS7にて順次大きなαとし、真の高さhtrueを正確にすることができる。
【0085】
これにより、高さhは基準の面からの真の高さhtrueとなったので、着目点Aの透過像を視野中央に合わせることができ、以降、拡大率Mや傾斜角度αを変更しても、視野ずれをなくすことができる。
【0086】
従って、以上のような実施の形態によれば、被検体3の着目点の高さが未知であって、かつ、X線源1のX線光軸が垂直方向(基準の方向)から傾斜したとき、透過像上の着目点のずれ量を入力するだけで、自動的に着目点の高さを求めて修正するので、確実に視野ずれを補正することができる。
【0087】
また、テーブル面2a(基準の面)から被検体3の着目点Aまでの真の高さhtrueが得られることにより、その後、拡大率Mや傾斜角度αを変更しても、視野ずれが生じることがなくなる。
【0088】
よって、本発明によるX線透視検査装置は、着目点Aの高さが未知の場合でも、真の高さhtrueが得られることにより、操作者がα,M(またはzuser)がどのような状態のときでも、xt,yt移動制御指令(xuser、yuser)を変更しつつ自由に視野変更でき、また、zt移動制御指令(zuserまたはM)、αを自由に変更しつつ視野ずれなしの状態に設定できる。
【0089】
(他の実施の形態)
(1) 上記実施の形態では、着目点の高さh、推定高さh、また、真の高さhtrueはテーブル面4aから測った高さとしている。これは必ずしもテーブル面4aを基準とする必要はなく、テーブル面に平行でテーブル2と一緒に移動する面であれば、任意の面を基準面として設定できる。
【0090】
また、傾斜角度αは、テーブル面4aの法線方向を基準として測っているが、これも必ずしも法線方向でなくても、基準の方向は任意に設定できる。
【0091】
(2) 上記実施の形態では、推定高さhに基づく設定着目点Asとテーブル面2aからの真の高さhtrueに基づく着目点Aとの間にずれが生じたとき、操作者が着目点Aにカーソル21を当てて位置指定入力すれば、データ処理部5は、当該着目点Aが画面中央の設定着目点Asに位置するようにテーブル2を移動させることにより、高さ修正を行う構成である。
【0092】
これに対し、操作者は、前述した操作の代わりに、例えば表示部19に表示される透過像を観察しながら、着目点Aの高さhを少しずつ変更し、視野ずれ補正ステップS4を実行して、前記式(2)〜式(4)に基づくテーブル移動量xt,yt,ztの計算処理を繰り返し実行することにより、着目点Aが画面中央に来るように制御してもよい。この場合には、若干時間がかかるが、着目点Aを画面中央に設定できると同時に着目点Aの高さhを真値に設定できる。
【0093】
(3) 上記実施の形態では、垂直方向からX線光軸を傾斜させるために、X線検出器4を移動させているが、例えばX線源1とX線検出器4とを両方を移動させるとか、あるいはX線源1のみを移動させる構成であってもよい。このような移動制御の場合には、テーブル2の移動量xt,yt,ztの具体的な計算式は、前述した式(5)〜式(10)とは異なったものとなる。
【0094】
(4) 上記実施の形態では、テーブル面2aから着目点Aまでの真の高さhtrueを式(11)を用いて計算しているが、この式(11)は近似式である。厳密解を得る場合には、
ε=arctan(Δj・Δx/L)
htrue=h−L・sin(ε)/(M・sin(α−ε)) ……(11)’
なる演算式を用いて、真の高さhtrueを求める。なお、(Δj・Δx/L)≪1のとき、式(11)’は式(11)で近似できるが、誤差を極力少なくする場合には、式(11)’を用いて求めるのが好ましい。
【0095】
(5) 上記実施の形態では、着目点高さ修正プログラム15cは、α=0°での着目点Aの透過像を起点とし、推定高さhと着目点Aの透過像のずれ量から着目点Aの真の高さhtrueを求めているが、例えば任意の傾斜角度αをずれの起点とすることもできる。
【0096】
この場合は、処理手順は図4と同じであるが、着目点高さ修正プログラム15cが変更される結果、図4のステップS1とステップS7の処理のみが異なる。以下、ステップS1,ステップS7の処理について説明する。
【0097】
ステップS1:操作者は入力部17からxt,yt移動制御指令(xuser、yuser)を入力し、被検体3の着目点Aが透過像の中央に来るようにテーブル2を移動制御することで、当該着目点AがX線光軸7上に一致するようにする。このとき、データ演算処理部11は、xuser,yuserが変更設定された後、このときの傾斜角度αをずれ起点の傾斜角度αaとする。
αa=xuser,yuser変更時点でのα ……(12)
ここで、初回のステップS1ではα=0°であるが、ステップS3にてX線検出器4の移動に伴って傾斜角度αが変更された後、ステップS5でxuser,yuserの変更要求があるとステップS1に戻るが、このときにはαは0°ではない。
【0098】
ステップS7:ここでは、データ演算処理部11は、着目点高さ修正プログラム15cを実行し、着目点Aの真の高さhtrue及びxuserの補正量Δxuserを求めるものであって、図7を参照して説明する。なお、同図において図5と同一符号の場合には図5と同じ意味・機能を有するものとする。
【0099】
今、ずれ起点の傾斜角度をαaとすると、この傾斜角度αaでは、着目点Aは、X線光軸上にあるが、一般にステップS2で入力される推定高さhから定まる設定着目点Asとは一致していない。
【0100】
これにより、傾斜角度をαに変更したとき、設定着目点Asは視野中央に来るように視野補正されるが、着目点Aはずれ量Δjを生じる。そこで、操作者は、前述した実施の形態と同じ要領で、入力部17のマウスなどを用いて、透過像上の着目点Aにカーソル21を合わせてダブリクリックし、ずれ量Δjを入力する。
【0101】
この入力されたずれ量Δjから図7を用いて幾何計算すれば、着目点Aの真の高さhtrue及びxuserの補正量Δxuserを求めることができる。
【0102】
具体的には、着目点高さ修正プログラム15cを用いて、下式に従って真の高さhtrue及び補正量Δxuserを求める。
ε=arctan(Δj・Δx/L)
Δh=−L・sin(ε)/(M・sin(α−ε))
Δh´=Δh・tan(α−ε)/{tan(α−ε)−tan(αa)}
htrue=h+Δh’ ……(11)”
Δxuser=Δh’・tan(αa) ……(13)
引き続き、データ演算処理部11は、推定高さhの代わりにhtrueを用い、xuserを補正量Δxuserだけ自動変更し、ステップS4に後退して視野ずれ補正プログラム15bに従って視野ずれを補正する。
【0103】
この実施の形態によれば、αa=0°で着目点調整を行う場合は上記実施の形態(他の実施の形態(4)を含む)と全く同様の作用・効果を奏する。これは、αa=0°の場合、式(11)”は式(11)’に一致し、式(13)はΔxuser=0と成ることより分る。
【0104】
さらに、この実施の形態によれば、任意の傾斜角度αaで着目点調整を行った場合でも、このとき調整された着目点Aの透過像を起点としたずれ量Δjを入力することにより、着目点高さを自動修正できる追加的な効果を奏する。
【0105】
(6) この実施の形態では、テーブル移動機構8としては、テーブル2を直交する3方向であるxt,yt,ztに平行移動させる機能(上記実施の形態)の他、テーブル面2aに沿った回転を行う機能を追加し、また、入力される移動制御指令xuser,yuserに従った着目点移動のみを行う専用機能を追加している。
【0106】
図8は本実施の形態における概念構成図である。なお、同図において、図1と同一符号を付した部分は図1と同じ意味・機能を有するものであり、また重複部分は一部省略記載している。特に本実施の形態においては、テーブル移動機構28とそのテーブル移動制御に関する部分が変更となる。
【0107】
テーブル移動機構28は、テーブル面2aの垂線である回転軸29に対し、テーブル2を回転角φ回転させる回転機構28aと、テーブル2を回転軸29とともにxt,yt,zt方向に移動させるxt−yt−zt機構28bと、回転軸29に対し、テーブル2をxt,yt方向に移動させるxuser−yuser機構28cとから成る。
【0108】
ここで、テーブル面2aと回転軸29の交点をTとすると、xt−yt−zt機構28bの移動量xt,yt,ztは、X線焦点Fから計測されたT点の座標を表すように較正されているものとする。また、傾斜角度α=0°において、回転軸29はX線光軸7に一致し、回転軸29上のT点から高さhの点に設定着目点Asが位置している。
【0109】
視野ずれ補正は点Asが視野中央からずれないように行われるので、回転軸29に対するテーブル面2aに沿った回転(傾斜方位φの変更)は常に視野中心の点Asを中心に行われる。
【0110】
そして、xuser−yuser機構28cは、データ演算処理部11から送られてくる入力部17から入力されたxt,yt移動制御指令xuser,yuserを受け取り、設定着目点Asの位置に所望の着目点Aを合わせるようにテーブル2を移動制御する。このときのテーブル移動量はxuser,yuserとする。
【0111】
前記データ処理部11の作用としては、他の実施の形態(5)と少し異なるので、その異なる部分のみを説明する。処理手順としては、図4と同じであるが、ステップS1とステップS4とステップS5の処理内容のみが若干異なる。
【0112】
ステップS1:操作者は入力部17からxuser,yuser,回転角φを入力し、着目点Aが透過像の中央に来るように調整する。このとき、データ演算処理部11は、xuser,yuser,φが変更設定された後、このときの傾斜角度αをずれ起点の傾斜角度αaとする。
αa=xuser,yuser又は回転角φ変更時点でのα ……(12)’
また、ここで、xuser,yuser,回転角φの設定変更については、xuser−yuser機構28c及び回転機構28aによって移動される。
【0113】
ステップS4:データ演算処理部11は、視野ずれ補正プログラム15bを実行するが、前記式(2),式(3)の代わりに、下記演算式に従ってテーブル移動量を求める。
xt=x(α,M)+x(h) ……(2)’
yt=y(α,M)+y(h) ……(3)’
その他は上記他の実施の形態(5)と同じである。
【0114】
ステップS5:上記他の実施の形態(5)に加え、回転角φの変更があった場合にはステップS1に後退する。
【0115】
この実施の形態によれば、他の実施の形態(5)の作用,効果に加え、任意時点で視野中心の設定着目点As中心に透過像の傾斜透視における回転角φ(傾斜方位)を変更することができる。また、この回転角φを変更したとき、ずれの起点の傾斜角度αaが変更されるので、回転角φを変更しても真の着目点の高さhtrueが正しく得られる。
【0116】
(7) 他の実施の形態(6)では、xuser−yuser機構28cは、回転角φが変化しても、着目点移動制御指令xuser及びyuserの方向がそれぞれxt,ytの方向から変化しないような機構としているが、回転角φの回転によって変化する機構であってもよい。
【0117】
すなわち、本実施の形態におけるデータ演算処理部11は、ステップS7でΔxuserを計算した後、xuserをΔxuserだけ自動変更する代わりに、図9に示すように、次の演算式に従って、
Δxuser’=Δxuser・cos(φ) (14)
Δyuser’=Δxuser・sin(φ) (15)
を計算した後、機構制御部18を介して移動制御指令をxuser−yuser機構28cに送出する。xuser−yuser機構28cは、xuserをΔxuser’だけ、yuserをΔyuser’だけテーブル2を自動変更する。
【0118】
この実施の形態によれば、他の実施の形態(6)と同様の効果を奏する他、被検体3の回転に合わせて着目点移動制御指令xuser,yuserの方向を回転できる。つまり、被検体4が回転しても、着目点移動制御指令を被検体基準の座標で行うことができる。
【0119】
その他、本発明は、上記実施の形態に限定されるものでなく、その要旨を逸脱しない範囲で種々変形して実施できる。
【図面の簡単な説明】
【0120】
【図1】本発明に係るX線透視検査装置の一実施の形態を説明する概念構成図。
【図2】図1に示すデータ処理部のハードウェア構成を示す図。
【図3】着目点の高さが既知の場合におけるX線透視検査方法の処理手順を説明する図。
【図4】着目点の高さが未知の場合におけるX線透視検査方法の処理手順を説明する図。
【図5】着目点の設定がずれている場合の幾何的な説明図。
【図6】着目点の設定がずれている場合の着目的の透過像を示す図。
【図7】他の実施の形態(5)における着目点がずれている場合の幾何的な説明図。
【図8】他の実施の形態(6)に係るX線透視検査装置の一部分を示す概念構成図。
【図9】他の実施の形態(7)における着目点調整移動軸の回転を示す幾何的な説明図。
【符号の説明】
【0121】
1…X線源、2…テーブル、2a…テーブル面、3…被検体、4…X線検出器、4a…検出面、5…データ処理部、6…検出器移動機構、7,7´…X線光軸、8…テーブル移動機構、11…データ演算処理部、13…検出器インターフェース、14…メモリ、15…ディスク、17…入力部、18…機構制御部、21…カーソル、28…テーブル移動機構、28a…回転機構、28b…xt−yt−zt機構、28c…xuser−yuser機構。
【特許請求の範囲】
【請求項1】
テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記X線検出器を移動させる検出器移動機構と、
前記テーブルを3方向に平行移動させるテーブル移動機構と、
入力部及び前記X線検出器で検出された透過像を表示する表示部を有するデータ処理手段とを備え、
前記データ処理手段は、
前記入力部より、基準の面から前記着目点までの推定高さを入力する推定高さ入力手段と、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定手段と、前記X線の光軸が基準の方向から所要の傾斜角度となるように前記検出器移動機構を介して前記X線検出器を移動制御する検出器移動制御手段と、前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブル移動機構を介して前記テーブルを移動制御する視野ずれ補正手段と、この視野ずれ補正手段の移動制御によって前記テーブルが移動したとき、前記推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正手段とを設け、
この修正手段によって求めた前記着目点の真の高さに基づき、前記視野ずれ補正手段を再度実行することを特徴とするX線透視検査装置。
【請求項2】
前記着目点高さ修正手段は、表示された透過像上のずれ量を伴った着目点を位置指定することにより、着目点の推定高さと位置指定信号とから真の高さを求めることを特徴とする請求項1に記載のX線透視検査装置。
【請求項3】
テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記被検体の着目点が前記表示された透過像の中央にくるように前記テーブルをテーブル面に沿った方向に移動制御する着目点調整ステップと、
外部より、基準の面から前記着目点までの推定高さが入力され、かつ、前記テーブルをテーブル面に垂直に移動させたとき、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定ステップと、
前記X線の光軸が基準の方向から所要の傾斜角度となるように前記X線検出器を移動制御する検出器移動ステップと、
前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブルを移動制御する視野ずれ補正ステップと、
この視野ずれ補正ステップの移動制御によって前記テーブルを移動させた後、前記着目点の推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正ステップと、
この修正ステップによって求めた前記着目点の真の高さに基づき、前記視野ずれ補正ステップを再度実行し、前記透過像上の前記着目点のずれ量を無くするステップとを有することを特徴とするX線透視検査方法。
【請求項4】
テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記被検体の着目点が前記表示された透過像の中央にくるように前記テーブルをテーブル面に沿った方向に移動制御する着目点調整ステップと、
外部より、基準の面から前記着目点までの推定高さが入力され、かつ、前記テーブルをテーブル面に垂直に移動させたとき、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定ステップと、
前記X線の光軸が基準の方向から所要の傾斜角度となるように前記X線検出器を移動制御する検出器移動ステップと、
前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブルを移動制御する視野ずれ補正ステップと、
外部より、変更された前記着目点の推定高さが入力されるごとに、前記着目点の推定高さのみを変更された値に変更して前記視野ずれ補正ステップを繰り返し実行し、前記透過像上の前記着目点のずれを無くするステップとを有することを特徴とするX線透視検査方法。
【請求項1】
テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記X線検出器を移動させる検出器移動機構と、
前記テーブルを3方向に平行移動させるテーブル移動機構と、
入力部及び前記X線検出器で検出された透過像を表示する表示部を有するデータ処理手段とを備え、
前記データ処理手段は、
前記入力部より、基準の面から前記着目点までの推定高さを入力する推定高さ入力手段と、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定手段と、前記X線の光軸が基準の方向から所要の傾斜角度となるように前記検出器移動機構を介して前記X線検出器を移動制御する検出器移動制御手段と、前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブル移動機構を介して前記テーブルを移動制御する視野ずれ補正手段と、この視野ずれ補正手段の移動制御によって前記テーブルが移動したとき、前記推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正手段とを設け、
この修正手段によって求めた前記着目点の真の高さに基づき、前記視野ずれ補正手段を再度実行することを特徴とするX線透視検査装置。
【請求項2】
前記着目点高さ修正手段は、表示された透過像上のずれ量を伴った着目点を位置指定することにより、着目点の推定高さと位置指定信号とから真の高さを求めることを特徴とする請求項1に記載のX線透視検査装置。
【請求項3】
テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記被検体の着目点が前記表示された透過像の中央にくるように前記テーブルをテーブル面に沿った方向に移動制御する着目点調整ステップと、
外部より、基準の面から前記着目点までの推定高さが入力され、かつ、前記テーブルをテーブル面に垂直に移動させたとき、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定ステップと、
前記X線の光軸が基準の方向から所要の傾斜角度となるように前記X線検出器を移動制御する検出器移動ステップと、
前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブルを移動制御する視野ずれ補正ステップと、
この視野ずれ補正ステップの移動制御によって前記テーブルを移動させた後、前記着目点の推定高さによる前記透過像上の前記着目点のずれ量に基づき、前記基準の面から前記着目点までの修正された真の高さを求める着目点高さ修正ステップと、
この修正ステップによって求めた前記着目点の真の高さに基づき、前記視野ずれ補正ステップを再度実行し、前記透過像上の前記着目点のずれ量を無くするステップとを有することを特徴とするX線透視検査方法。
【請求項4】
テーブル上に載置される被検体に対してX線源からのX線を照射し、この被検体の着目点の透過像をX線検出器で検出し表示するX線透視検査装置において、
前記被検体の着目点が前記表示された透過像の中央にくるように前記テーブルをテーブル面に沿った方向に移動制御する着目点調整ステップと、
外部より、基準の面から前記着目点までの推定高さが入力され、かつ、前記テーブルをテーブル面に垂直に移動させたとき、前記X線源と前記X線検出器との間の距離と前記X線源と前記着目点との間の距離との比である透過像の拡大率を設定する拡大率設定ステップと、
前記X線の光軸が基準の方向から所要の傾斜角度となるように前記X線検出器を移動制御する検出器移動ステップと、
前記設定された拡大率と前記X線の光軸の傾斜角度と前記着目点の推定高さとをパラメータとし、当該着目点が前記X線の光軸上に位置するように、前記テーブルの移動位置を計算し、前記テーブルを移動制御する視野ずれ補正ステップと、
外部より、変更された前記着目点の推定高さが入力されるごとに、前記着目点の推定高さのみを変更された値に変更して前記視野ずれ補正ステップを繰り返し実行し、前記透過像上の前記着目点のずれを無くするステップとを有することを特徴とするX線透視検査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−233068(P2008−233068A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2007−258953(P2007−258953)
【出願日】平成19年10月2日(2007.10.2)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成19年10月2日(2007.10.2)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
[ Back to top ]