
X線CT装置
【課題】精度を維持してCT画像の合成を行うことができ、試料を部分的に拡大して撮影する場合等においても、複数の3次元画像を高い精度のもとに合成して試料全体の3次元情報を正確に得ることのできるX線CT装置を提供する。
【解決手段】回転テーブル3上に試料Wを収容する筒状の枠体20を配置し、その枠体20には、回転テーブル3上への搭載状態で回転軸Rに略直交する方向に伸びる少なくとも1本の溝を21a,21b,21cを形成しておき、各部分撮影に際しては溝21a,21b,または21cのいずれかを含む領域を各撮影領域の重複領域に収まるようにすることで、各3次元画像の合成に際しては各溝21a,21b,または21cが合致するように画像を合成することによって、合成精度を向上させることを可能とする。
【解決手段】回転テーブル3上に試料Wを収容する筒状の枠体20を配置し、その枠体20には、回転テーブル3上への搭載状態で回転軸Rに略直交する方向に伸びる少なくとも1本の溝を21a,21b,21cを形成しておき、各部分撮影に際しては溝21a,21b,または21cのいずれかを含む領域を各撮影領域の重複領域に収まるようにすることで、各3次元画像の合成に際しては各溝21a,21b,または21cが合致するように画像を合成することによって、合成精度を向上させることを可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は産業用のX線CT装置に関する。
【背景技術】
【0002】
例えば工業製品や部品の全体の3次元形状を正確に把握して、製造上のさまざまなプロセスに利用しようとする試みが活発になってきいる。これは、現物の3次元情報をデジタル化して利用しようというもので、「現物融合型エンジニアリング」とも言われている。
【0003】
3次元形状を計測するには、接触式の3次元計測装置が従来から知られているが、測定ポイントが限定されるばかりでなく、内部形状を形成できない、時間が掛かる、などという問題がある。近年、光切断法やモアレ法などの光学式の形状測定が普及してきたが、全体の形状を撮るには画像合成が不可欠であり、また、内部形状が計測できないという問題もある。
【0004】
これに対し、CTスキャナーは内部形状を計測することができるという他の方式にはない大きな特徴があり、試料の表、裏、内部構造を含む完全な3次元データが一度のオペレーションで簡単に取得できるという手法は、現在のところX線CTが最も有力である(例えば特許文献1参照)。
【特許文献1】特開2004−226202号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、X線CTによりある程度の空間分解能を得ようとする場合には、試料を部分的に拡大して撮影することが有効である。また、検出器の大きさの制約を越えて大きなサイズの試料を計測する場合にも、試料を部分的に撮影することになる。このように試料の部分撮影により得られたX線投影データから、試料全体の3次元像を得るには、各部分的な撮影により得られるそれぞれの3次元画像を合成することになる。現状のX線CT装置においては、画像合成はサポートされていない。それぞれの部分的撮影によるデータを再構成して得られた画像のマッチングを取ることで合成することも可能であるが、総合的に精度を議論する場合には、その精度が試料の画像の形状的特徴の有無に起因してしまうという問題がある。
【0006】
本発明はこのような実情に鑑みてなされたもので、精度を維持してCT画像の合成を行うことができ、大きな試料で1回の撮影に収まらない場合や、試料を部分的に拡大して撮影する場合でも、複数の3次元画像を高い精度のもとに合成して試料全体の3次元情報を正確に得ることのできるX線CT装置の提供をその課題としている。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本発明のX線CT装置は、互いに対向配置されたX線発生装置とX線検出器の間に、試料を搭載してX線発生装置のX線焦点とX線検出器の中心とを結ぶ線に直交する回転軸を中心として回転する回転テーブルが設けられ、その回転テーブルの駆動により試料に回転を与えつつその微小回転角度ごとに取り込んだ試料のX線投影データを用いて、上記回転軸に直交する面に沿った試料の断層像を構築する再構成演算手段を備えたX線CT装置において、上記回転テーブル上で試料を収容する筒状の枠体を備え、その枠体は、試料を収容すべく上記回転テーブル上に配置された状態で、上記回転中心軸に略直交する方向に伸びる少なくとも1本の溝が形成されていることによって特徴づけられる(請求項1)。
【0008】
ここで、本発明においては、上記枠体のX線投影データに基づく画像情報から、撮影された試料の断層像の倍率を与える変換係数を算出する変換係数演算手段を備えた構成(請求項2)を好適に採用することができる。
【0009】
また、本発明においては、当該X線CT装置が、上記回転テーブルを1回転させて得たX線投影データを用いて、試料の3次元情報を得ることのできるX線CT装置であって、1回の撮影後に上記X線発生装置とX線検出器の対と回転テーブルとを回転軸に沿った方向に相対移動させ、移動後の撮影範囲が先の撮影範囲とが回転軸方向に一部重複するように撮影する機能を備えるとともに、その各撮影範囲の重複部分に上記枠体の溝が含まれ、複数回の撮影により得られた各X線投影データを用いて再構成した各3次元断層像を結合して一つの3次元データを得るに当たり、上記溝の形状情報を利用する画像処理手段を備えた構成(請求項3)を採用することができる。
【0010】
本発明は、回転テーブル上の試料を筒状の枠体に収容した状態でCT撮影を行い、その枠体を含めたX線投影データを採取し、試料と枠体を併せた断層像を再構成演算により構築し、枠体の形状情報を用いて部分撮影時における画像の合成を高精度に行うとするものである。
【0011】
すなわち、試料は筒状の枠体内に収容した状態で回転テーブル上に搭載し、枠体には回転テーブル上に搭載した状態で回転軸に略直交する方向に伸びる溝を少なくとも1本形成しておく。CT撮影により得られる断層像は、試料と枠体を併せたものとなる。多数回のCT撮影による多数の断層像からなる3次元断層像を構築するに際して、枠体の溝が合致するように画像を合成することで、画像の合成精度を向上させることができる。
【0012】
あるいは請求項3に係る発明のように、1回のCT撮影で3次元断層像が得られるCT装置にあっては、1回の撮影後にX線発生装置とX線検出器の対と回転テーブルとを回転軸に沿う方向に相対的に移動させ、移動前後の撮影範囲が枠体の溝を含んだ領域で一部重複するようにする。これにより、各回の撮影により得られる各3次元断層像は、互いに隣接するものどうしにおいて枠体の同じ溝含むことになり、その溝が枠体の像において一致するように画像を合成することにより、画像の結合精度が向上する。
【0013】
また、請求項2に係る発明のように、枠体の形状(寸法)情報を用いることにより、得られた断層像が倍率を与える変換係数(ピクセル等量)を容易に算出することができる。
【発明の効果】
【0014】
本発明によれば、筒状の枠体内に試料を収容した状態で回転テーブルの上に搭載し、CT撮影により試料とともに枠体のX線投影データを取り込み、枠体には回転テーブルへの搭載状態においてその回転軸と略直交する方向に伸びる溝を形成しているため、試料を部分的に拡大したCT撮影を複数回行ったり、あるいはサイズの大きな試料を部分的にCT撮影し、それぞれの撮影により得られたX線投影データを用いて再構成されたそれぞれの3次元断層像を合成するに当たり、溝を含む枠体の画像情報を利用して合成することによって、その合成の精度が向上し、現物融合型エンジニアリングに十分に供することのできる3次元情報を得ることができる。
【0015】
また、枠体の溝を含む形状・寸法情報を用いることによって、試料の画像上の寸法と実寸法とを求めるために必要な画像の倍率の変換係数(ピクセル等量)を簡単な計算によって求めることができる。
【0016】
筒状の枠体は、回転テーブル上で試料を固定する役割を担い、その試料の固定は枠体内部に挿入するだけでよく、また、試料は枠体の内側に収容された状態で撮影に供されるため、試料とX線発生装置とが直接的に干渉することを防止することができるという利点もある。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照しつつ本発明の実施の形態について説明する。
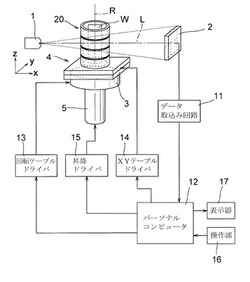
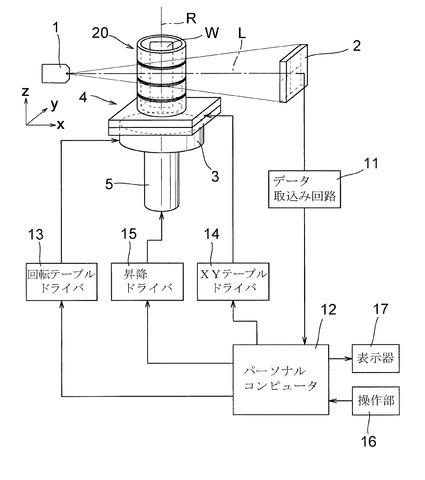
図1は本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成の要部を表すブロック図とを併記して示す図である。
【0018】
X線発生装置1に水平方向に対向してX線検出器2が配置されており、これらの間に回転テーブル3が設けられている。X線発生装置1は水平方向にコーンビーム状のX線を発生することができ、X線検出器2は例えばフラットパネルディテクタであって2次元のX線検出器である。
【0019】
回転テーブル3は、X線発生装置1からのX線の照射方向(X線光軸L方向、x軸方向とする)に直交する鉛直方向(z軸方向とする)の回転軸Rを中心として回転することができる。この回転テーブル3の上には、x,y軸方向に移動するXYテーブル4が配置されており、そのXYテーブル4の上に試料Wが載せられる。また、回転テーブル3はテーブル昇降機構5によってz軸方向に移動させることができる。
【0020】
前記したX線検出器2からの画素出力はデータ取り込み回路11を介してパーソナルコンピュータ12に取り込まれる。また、回転テーブル3は回転テーブルドライバ13からの駆動信号によって駆動制御され、XYテーブル4はXYテーブルドライブ14からの駆動信号によって駆動制御され、更にテーブル昇降機構5は昇降ドライバ15からの駆動信号によって駆動制御される。こられの各ドライバ13,14および15はパーソナルコンピュータ12の制御下に置かれている。パーソナルコンピュータ12には、マウスやキーボードあるいはジョイスティック等からなる操作部16が接続されており、この操作部16の操作によって回転テーブル3に回転を与え、XYテーブル4をx,y軸方向任意の向きに移動させ、更には回転テーブル3をz軸方向に昇降させることができる。なお、X線発生装置1は高圧発生装置(図示せず)から管電圧および管電流が供給される。
【0021】
CT撮影時の動作は、XYテーブル4上の試料Wをx,y,z軸方向所要位置に位置決めした状態で、X線発生装置1からX線を照射しつつ、回転テーブル3をあらかじめ設定されている微小角度ずつ回転させ、その各回転位置においてX線検出器2からの出力、つまりX線投影データをデータ取り込み回路11を介してパーソナルコンピュータ12に取り込み、各画素データを記憶する、という公知の動作である。
【0022】
CT撮影により取り込まれたX線投影データは、パーソナルコンピュータ12にインストールされているプログラムに従った公知の再構成演算により試料Wの3次元断層像の構築に供される。その断層像は表示器17に表示される。
【0023】
さて、この実施の形態の特徴は、XYテーブル4上に試料Wのみを載せるのではなく、試料Wは筒状の枠体20内に収容された状態でXYテーブル4上に載せられる点である。
【0024】
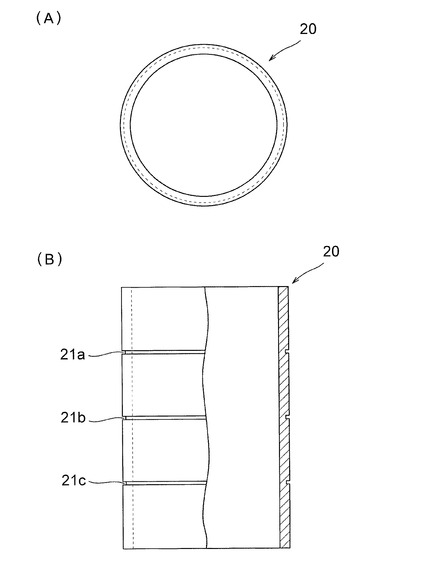
枠体20は、図2に平面図(A)および部分断面正面図(B)を示すように、円筒体であってその外周に3本の溝21a,21b,21cが形成された形状をしており、これらの各溝21a,21b,21cはそれぞれ円筒体の軸線に対して直交する方向に伸びてそれぞれ一周している。また、枠体20の両端面についても軸線に直交している。従って、この枠体20をXYテーブル4上に載せたときには、各溝21はXYテーブル4の上面に対して平行となり、ひいては回転テーブル3の回転軸Rに対して直交した状態となる。また、この例において、各溝21a,21b,21cの幅並びに深さはそれぞれ周方向に一定であり、かつ、各溝21a,21b,21cどうしも同一である。このような枠体20内に試料Wが収容された状態でXYテーブル4上に載せられる。この枠体20の材質は、X線の透過度がある程度良好な材質、例えばアクリル樹脂等を用いるのが適している。
【0025】
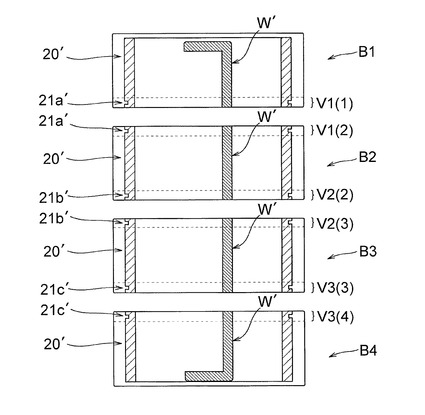
このような枠体20を用いてその内部に試料Wを収容し、部分CT撮影を行う。その際、図3に縦断面図を用いて例示するように、1回のCT撮影後に昇降機構5を駆動してz軸方向に回転テーブル3を移動させ、次のCT撮影を行う。このとき、各溝21a,21b,21cのいずれかが各回のCT撮影における撮影領域で重複する領域に含まれるように、昇降機構5を駆動制御する。この撮影動作を自動的に行う場合には、例えば操作部16から各溝21a,21b,21cのピッチと幅をあらかじめ入力することにより、溝の幅よりも規定寸法だけz軸方向に余裕を持たせて移動前後の撮影領域が重複するように昇降機構5を駆動制御すればよい。
【0026】
図3の例では、3本の溝21a,21b,21cを備えた枠体20を用いて、4回の部分撮影を行っている。各部分撮影により採取されたX線投影データには、試料Wとともに枠体20のX線投影データが含まれ、各回の部分撮影で得られたX線投影データを用いてそれぞれに3次元断層像を構築したとき、それぞれの部分撮影で得られる3次元データをブロックB1〜B4すると、その各ブロックB1〜B4には、試料Wの3次元データW′と、枠体20の3次元データ20′が含まれる。そして、これらの各ブロックB1〜B4では、互いに隣接するものどうしにおいてブロックの一部が重複したものとなる。具体的には、ブロックB1とB2ではV1(1)とV1(2)が重複し、B2とB3ではV2(2)とV2(3)が、B3とB4ではV3(3)とV3(4)が、それぞれ重複し、その各重複領域V1〜V3には、枠体20に形成されている溝21a,21b,21cの像21a′,21b′,21c′が含まれることになる。
【0027】
これらの各ブロックB1〜B4を結合して試料Wの全体の3次元データを得るときには、パーソナルコンピュータ12は以下の手法によって各ブロックどうしを結合する。
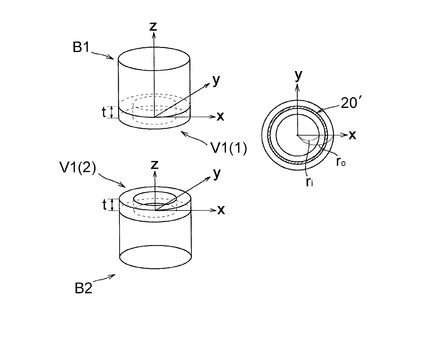
すなわち、ブロックB1とB2を結合する場合を例にとると、図4に示すように座標をとったとき、枠体20の像20′が半径ri の円の外で、半径ro の円の内側に収まるような円ri ,ro を考える。ブロックB1とB2の互いの重複領域V1(1)とV1(2)のz軸方向への厚みをtとすると、領域V1(1),V1(2)は、いずれも
{ri 2 <(x2 +y2 )<ro 2 、かつ、0<z<t}
と示すことかできる。このV1(1)とV1(2)をオーバーラップさせてブロックB1とB2を最も高い精度のもとに結合させる。
【0028】
V1(1)とV1(2)とのx,y,z軸方向への相対的なずらせ量をδx,δy,δzとしたとき、
【0029】
【数1】

【0030】
について、δx,δy,δzをそれぞれ、δxmin <δx<δxmax 、δymin <δy<δymax 、およびδzmin <δz<δzmax の範囲で変化させたとき、最大のSUMが得られるδx,δy,δzを求める。ここで、D1 (x,y,z)およびD2 (x,y,z)は、それぞれV1(1)およびV2(2)の座標(x,y,z)における画素の濃度値である。
【0031】
実際のピーク値は、図5にxを例にとってグラフで示すようなものとなるが、グラフを放物線で近似することで、サブピクセルオーダーでピーク値を与えるδx,δy,δzを求めることができる。よって、各ブロックB1〜B4を、サブピクセルオーダーのもとに結合することが可能となる。
【0032】
また、枠体20の外径寸法や内径寸法、あるいは各溝21a,21b,21cの幅寸法等の実寸法をあらかじめ入力しておくことにより、3次元断層像上で対応する寸法との比から、3次元断層像のピクセル等量を簡単に求めることができ、ひいては試料Wの内部構造の実寸法を知ることができる。
【0033】
また、枠体20は試料Wを保持する役割や、試料WとX線発生装置1とが直接的に衝突することを防止する役割をも担っており、試料Wは単に枠体20内に挿入するだけで実質的に回転テーブル3(XYテーブル4)上に保持された状態となり、作業性も良好なものとなる。
【0034】
なお、以上の実施の形態においては、コーンビーム状のX線を発生して一度のCT撮影により3次元情報を得ることのできるX線CT装置に本発明を適用した例を示したが、他のX線CT装置、例えばマルチスライスタイプのX線CT装置にも本発明を適用し得ることは勿論である。
【0035】
また、枠体20の形状としては、上記した実施の形態のように断面円形の円筒体を用いた例を示したが、断面形状については特に限定されるものではなく、角筒体や楕円筒体等を用いることも可能である。更に、溝の本数は1本以上あればよいことは言うまでもない。
【図面の簡単な説明】
【0036】
【図1】本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成の要部を表すブロック図とを併記して示す図である。
【図2】本発明の実施の形態に用いられる枠体の平面図(A)および部分断面正面図(B)である。
【図3】本発明の実施の形態により部分撮影を行う場合の撮影領域の分割の仕方の例を縦断面図を用いて示す説明図である。
【図4】本発明の実施の形態において各ブロックを結合して一体化する際の計算方法の例の説明図である。
【図5】図4を用いて説明した計算方法により求められるピーク値とピクセルとの関係を表すグラフである。
【符号の説明】
【0037】
1 X線発生装置
2 X線検出器
3 回転テーブル
4 XYテーブル
5 昇降機構
11 データ取り込み回路
12 パーソナルコンピュータ
13 回転テーブルドライバ
14 XYテーブルドライバ
15 昇降ドライバ
16 操作部
17 表示器
20 枠体
21a,21b,21c 溝
W 試料
【技術分野】
【0001】
本発明は産業用のX線CT装置に関する。
【背景技術】
【0002】
例えば工業製品や部品の全体の3次元形状を正確に把握して、製造上のさまざまなプロセスに利用しようとする試みが活発になってきいる。これは、現物の3次元情報をデジタル化して利用しようというもので、「現物融合型エンジニアリング」とも言われている。
【0003】
3次元形状を計測するには、接触式の3次元計測装置が従来から知られているが、測定ポイントが限定されるばかりでなく、内部形状を形成できない、時間が掛かる、などという問題がある。近年、光切断法やモアレ法などの光学式の形状測定が普及してきたが、全体の形状を撮るには画像合成が不可欠であり、また、内部形状が計測できないという問題もある。
【0004】
これに対し、CTスキャナーは内部形状を計測することができるという他の方式にはない大きな特徴があり、試料の表、裏、内部構造を含む完全な3次元データが一度のオペレーションで簡単に取得できるという手法は、現在のところX線CTが最も有力である(例えば特許文献1参照)。
【特許文献1】特開2004−226202号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、X線CTによりある程度の空間分解能を得ようとする場合には、試料を部分的に拡大して撮影することが有効である。また、検出器の大きさの制約を越えて大きなサイズの試料を計測する場合にも、試料を部分的に撮影することになる。このように試料の部分撮影により得られたX線投影データから、試料全体の3次元像を得るには、各部分的な撮影により得られるそれぞれの3次元画像を合成することになる。現状のX線CT装置においては、画像合成はサポートされていない。それぞれの部分的撮影によるデータを再構成して得られた画像のマッチングを取ることで合成することも可能であるが、総合的に精度を議論する場合には、その精度が試料の画像の形状的特徴の有無に起因してしまうという問題がある。
【0006】
本発明はこのような実情に鑑みてなされたもので、精度を維持してCT画像の合成を行うことができ、大きな試料で1回の撮影に収まらない場合や、試料を部分的に拡大して撮影する場合でも、複数の3次元画像を高い精度のもとに合成して試料全体の3次元情報を正確に得ることのできるX線CT装置の提供をその課題としている。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本発明のX線CT装置は、互いに対向配置されたX線発生装置とX線検出器の間に、試料を搭載してX線発生装置のX線焦点とX線検出器の中心とを結ぶ線に直交する回転軸を中心として回転する回転テーブルが設けられ、その回転テーブルの駆動により試料に回転を与えつつその微小回転角度ごとに取り込んだ試料のX線投影データを用いて、上記回転軸に直交する面に沿った試料の断層像を構築する再構成演算手段を備えたX線CT装置において、上記回転テーブル上で試料を収容する筒状の枠体を備え、その枠体は、試料を収容すべく上記回転テーブル上に配置された状態で、上記回転中心軸に略直交する方向に伸びる少なくとも1本の溝が形成されていることによって特徴づけられる(請求項1)。
【0008】
ここで、本発明においては、上記枠体のX線投影データに基づく画像情報から、撮影された試料の断層像の倍率を与える変換係数を算出する変換係数演算手段を備えた構成(請求項2)を好適に採用することができる。
【0009】
また、本発明においては、当該X線CT装置が、上記回転テーブルを1回転させて得たX線投影データを用いて、試料の3次元情報を得ることのできるX線CT装置であって、1回の撮影後に上記X線発生装置とX線検出器の対と回転テーブルとを回転軸に沿った方向に相対移動させ、移動後の撮影範囲が先の撮影範囲とが回転軸方向に一部重複するように撮影する機能を備えるとともに、その各撮影範囲の重複部分に上記枠体の溝が含まれ、複数回の撮影により得られた各X線投影データを用いて再構成した各3次元断層像を結合して一つの3次元データを得るに当たり、上記溝の形状情報を利用する画像処理手段を備えた構成(請求項3)を採用することができる。
【0010】
本発明は、回転テーブル上の試料を筒状の枠体に収容した状態でCT撮影を行い、その枠体を含めたX線投影データを採取し、試料と枠体を併せた断層像を再構成演算により構築し、枠体の形状情報を用いて部分撮影時における画像の合成を高精度に行うとするものである。
【0011】
すなわち、試料は筒状の枠体内に収容した状態で回転テーブル上に搭載し、枠体には回転テーブル上に搭載した状態で回転軸に略直交する方向に伸びる溝を少なくとも1本形成しておく。CT撮影により得られる断層像は、試料と枠体を併せたものとなる。多数回のCT撮影による多数の断層像からなる3次元断層像を構築するに際して、枠体の溝が合致するように画像を合成することで、画像の合成精度を向上させることができる。
【0012】
あるいは請求項3に係る発明のように、1回のCT撮影で3次元断層像が得られるCT装置にあっては、1回の撮影後にX線発生装置とX線検出器の対と回転テーブルとを回転軸に沿う方向に相対的に移動させ、移動前後の撮影範囲が枠体の溝を含んだ領域で一部重複するようにする。これにより、各回の撮影により得られる各3次元断層像は、互いに隣接するものどうしにおいて枠体の同じ溝含むことになり、その溝が枠体の像において一致するように画像を合成することにより、画像の結合精度が向上する。
【0013】
また、請求項2に係る発明のように、枠体の形状(寸法)情報を用いることにより、得られた断層像が倍率を与える変換係数(ピクセル等量)を容易に算出することができる。
【発明の効果】
【0014】
本発明によれば、筒状の枠体内に試料を収容した状態で回転テーブルの上に搭載し、CT撮影により試料とともに枠体のX線投影データを取り込み、枠体には回転テーブルへの搭載状態においてその回転軸と略直交する方向に伸びる溝を形成しているため、試料を部分的に拡大したCT撮影を複数回行ったり、あるいはサイズの大きな試料を部分的にCT撮影し、それぞれの撮影により得られたX線投影データを用いて再構成されたそれぞれの3次元断層像を合成するに当たり、溝を含む枠体の画像情報を利用して合成することによって、その合成の精度が向上し、現物融合型エンジニアリングに十分に供することのできる3次元情報を得ることができる。
【0015】
また、枠体の溝を含む形状・寸法情報を用いることによって、試料の画像上の寸法と実寸法とを求めるために必要な画像の倍率の変換係数(ピクセル等量)を簡単な計算によって求めることができる。
【0016】
筒状の枠体は、回転テーブル上で試料を固定する役割を担い、その試料の固定は枠体内部に挿入するだけでよく、また、試料は枠体の内側に収容された状態で撮影に供されるため、試料とX線発生装置とが直接的に干渉することを防止することができるという利点もある。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照しつつ本発明の実施の形態について説明する。
図1は本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成の要部を表すブロック図とを併記して示す図である。
【0018】
X線発生装置1に水平方向に対向してX線検出器2が配置されており、これらの間に回転テーブル3が設けられている。X線発生装置1は水平方向にコーンビーム状のX線を発生することができ、X線検出器2は例えばフラットパネルディテクタであって2次元のX線検出器である。
【0019】
回転テーブル3は、X線発生装置1からのX線の照射方向(X線光軸L方向、x軸方向とする)に直交する鉛直方向(z軸方向とする)の回転軸Rを中心として回転することができる。この回転テーブル3の上には、x,y軸方向に移動するXYテーブル4が配置されており、そのXYテーブル4の上に試料Wが載せられる。また、回転テーブル3はテーブル昇降機構5によってz軸方向に移動させることができる。
【0020】
前記したX線検出器2からの画素出力はデータ取り込み回路11を介してパーソナルコンピュータ12に取り込まれる。また、回転テーブル3は回転テーブルドライバ13からの駆動信号によって駆動制御され、XYテーブル4はXYテーブルドライブ14からの駆動信号によって駆動制御され、更にテーブル昇降機構5は昇降ドライバ15からの駆動信号によって駆動制御される。こられの各ドライバ13,14および15はパーソナルコンピュータ12の制御下に置かれている。パーソナルコンピュータ12には、マウスやキーボードあるいはジョイスティック等からなる操作部16が接続されており、この操作部16の操作によって回転テーブル3に回転を与え、XYテーブル4をx,y軸方向任意の向きに移動させ、更には回転テーブル3をz軸方向に昇降させることができる。なお、X線発生装置1は高圧発生装置(図示せず)から管電圧および管電流が供給される。
【0021】
CT撮影時の動作は、XYテーブル4上の試料Wをx,y,z軸方向所要位置に位置決めした状態で、X線発生装置1からX線を照射しつつ、回転テーブル3をあらかじめ設定されている微小角度ずつ回転させ、その各回転位置においてX線検出器2からの出力、つまりX線投影データをデータ取り込み回路11を介してパーソナルコンピュータ12に取り込み、各画素データを記憶する、という公知の動作である。
【0022】
CT撮影により取り込まれたX線投影データは、パーソナルコンピュータ12にインストールされているプログラムに従った公知の再構成演算により試料Wの3次元断層像の構築に供される。その断層像は表示器17に表示される。
【0023】
さて、この実施の形態の特徴は、XYテーブル4上に試料Wのみを載せるのではなく、試料Wは筒状の枠体20内に収容された状態でXYテーブル4上に載せられる点である。
【0024】
枠体20は、図2に平面図(A)および部分断面正面図(B)を示すように、円筒体であってその外周に3本の溝21a,21b,21cが形成された形状をしており、これらの各溝21a,21b,21cはそれぞれ円筒体の軸線に対して直交する方向に伸びてそれぞれ一周している。また、枠体20の両端面についても軸線に直交している。従って、この枠体20をXYテーブル4上に載せたときには、各溝21はXYテーブル4の上面に対して平行となり、ひいては回転テーブル3の回転軸Rに対して直交した状態となる。また、この例において、各溝21a,21b,21cの幅並びに深さはそれぞれ周方向に一定であり、かつ、各溝21a,21b,21cどうしも同一である。このような枠体20内に試料Wが収容された状態でXYテーブル4上に載せられる。この枠体20の材質は、X線の透過度がある程度良好な材質、例えばアクリル樹脂等を用いるのが適している。
【0025】
このような枠体20を用いてその内部に試料Wを収容し、部分CT撮影を行う。その際、図3に縦断面図を用いて例示するように、1回のCT撮影後に昇降機構5を駆動してz軸方向に回転テーブル3を移動させ、次のCT撮影を行う。このとき、各溝21a,21b,21cのいずれかが各回のCT撮影における撮影領域で重複する領域に含まれるように、昇降機構5を駆動制御する。この撮影動作を自動的に行う場合には、例えば操作部16から各溝21a,21b,21cのピッチと幅をあらかじめ入力することにより、溝の幅よりも規定寸法だけz軸方向に余裕を持たせて移動前後の撮影領域が重複するように昇降機構5を駆動制御すればよい。
【0026】
図3の例では、3本の溝21a,21b,21cを備えた枠体20を用いて、4回の部分撮影を行っている。各部分撮影により採取されたX線投影データには、試料Wとともに枠体20のX線投影データが含まれ、各回の部分撮影で得られたX線投影データを用いてそれぞれに3次元断層像を構築したとき、それぞれの部分撮影で得られる3次元データをブロックB1〜B4すると、その各ブロックB1〜B4には、試料Wの3次元データW′と、枠体20の3次元データ20′が含まれる。そして、これらの各ブロックB1〜B4では、互いに隣接するものどうしにおいてブロックの一部が重複したものとなる。具体的には、ブロックB1とB2ではV1(1)とV1(2)が重複し、B2とB3ではV2(2)とV2(3)が、B3とB4ではV3(3)とV3(4)が、それぞれ重複し、その各重複領域V1〜V3には、枠体20に形成されている溝21a,21b,21cの像21a′,21b′,21c′が含まれることになる。
【0027】
これらの各ブロックB1〜B4を結合して試料Wの全体の3次元データを得るときには、パーソナルコンピュータ12は以下の手法によって各ブロックどうしを結合する。
すなわち、ブロックB1とB2を結合する場合を例にとると、図4に示すように座標をとったとき、枠体20の像20′が半径ri の円の外で、半径ro の円の内側に収まるような円ri ,ro を考える。ブロックB1とB2の互いの重複領域V1(1)とV1(2)のz軸方向への厚みをtとすると、領域V1(1),V1(2)は、いずれも
{ri 2 <(x2 +y2 )<ro 2 、かつ、0<z<t}
と示すことかできる。このV1(1)とV1(2)をオーバーラップさせてブロックB1とB2を最も高い精度のもとに結合させる。
【0028】
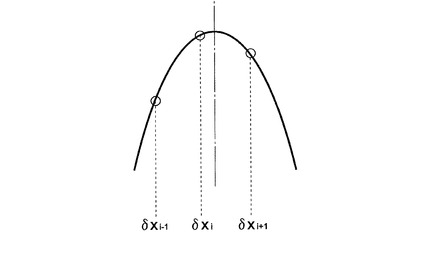
V1(1)とV1(2)とのx,y,z軸方向への相対的なずらせ量をδx,δy,δzとしたとき、
【0029】
【数1】
【0030】
について、δx,δy,δzをそれぞれ、δxmin <δx<δxmax 、δymin <δy<δymax 、およびδzmin <δz<δzmax の範囲で変化させたとき、最大のSUMが得られるδx,δy,δzを求める。ここで、D1 (x,y,z)およびD2 (x,y,z)は、それぞれV1(1)およびV2(2)の座標(x,y,z)における画素の濃度値である。
【0031】
実際のピーク値は、図5にxを例にとってグラフで示すようなものとなるが、グラフを放物線で近似することで、サブピクセルオーダーでピーク値を与えるδx,δy,δzを求めることができる。よって、各ブロックB1〜B4を、サブピクセルオーダーのもとに結合することが可能となる。
【0032】
また、枠体20の外径寸法や内径寸法、あるいは各溝21a,21b,21cの幅寸法等の実寸法をあらかじめ入力しておくことにより、3次元断層像上で対応する寸法との比から、3次元断層像のピクセル等量を簡単に求めることができ、ひいては試料Wの内部構造の実寸法を知ることができる。
【0033】
また、枠体20は試料Wを保持する役割や、試料WとX線発生装置1とが直接的に衝突することを防止する役割をも担っており、試料Wは単に枠体20内に挿入するだけで実質的に回転テーブル3(XYテーブル4)上に保持された状態となり、作業性も良好なものとなる。
【0034】
なお、以上の実施の形態においては、コーンビーム状のX線を発生して一度のCT撮影により3次元情報を得ることのできるX線CT装置に本発明を適用した例を示したが、他のX線CT装置、例えばマルチスライスタイプのX線CT装置にも本発明を適用し得ることは勿論である。
【0035】
また、枠体20の形状としては、上記した実施の形態のように断面円形の円筒体を用いた例を示したが、断面形状については特に限定されるものではなく、角筒体や楕円筒体等を用いることも可能である。更に、溝の本数は1本以上あればよいことは言うまでもない。
【図面の簡単な説明】
【0036】
【図1】本発明の実施の形態の構成図で、機械的構成を表す模式図とシステム構成の要部を表すブロック図とを併記して示す図である。
【図2】本発明の実施の形態に用いられる枠体の平面図(A)および部分断面正面図(B)である。
【図3】本発明の実施の形態により部分撮影を行う場合の撮影領域の分割の仕方の例を縦断面図を用いて示す説明図である。
【図4】本発明の実施の形態において各ブロックを結合して一体化する際の計算方法の例の説明図である。
【図5】図4を用いて説明した計算方法により求められるピーク値とピクセルとの関係を表すグラフである。
【符号の説明】
【0037】
1 X線発生装置
2 X線検出器
3 回転テーブル
4 XYテーブル
5 昇降機構
11 データ取り込み回路
12 パーソナルコンピュータ
13 回転テーブルドライバ
14 XYテーブルドライバ
15 昇降ドライバ
16 操作部
17 表示器
20 枠体
21a,21b,21c 溝
W 試料
【特許請求の範囲】
【請求項1】
互いに対向配置されたX線発生装置とX線検出器の間に、試料を搭載してX線発生装置のX線焦点とX線検出器の中心とを結ぶ線に直交する回転軸を中心として回転する回転テーブルが設けられ、その回転テーブルの駆動により試料に回転を与えつつその微小回転角度ごとに取り込んだ試料のX線投影データを用いて、上記回転軸に直交する面に沿った試料の断層像を構築する再構成演算手段を備えたX線CT装置において、
上記回転テーブル上で試料を収容する筒状の枠体を備え、その枠体は、試料を収容すべく上記回転テーブル上に配置された状態で、上記回転中心軸に略直交する方向に伸びる少なくとも1本の溝が形成されていることを特徴とするX線CT装置。
【請求項2】
上記枠体のX線投影データに基づく画像情報から、撮影された試料の断層像の倍率を与える変換係数を算出する変換係数演算手段を備えていることを特徴とする請求項1に記載のX線CT装置。
【請求項3】
当該X線CT装置が、上記回転テーブルを1回転させて得たX線投影データを用いて、試料の3次元情報を得ることのできるX線CT装置であって、1回の撮影後に上記X線発生装置とX線検出器の対と回転テーブルとを回転軸に沿った方向に相対移動させ、移動後の撮影範囲が先の撮影範囲とが回転軸方向に一部重複するように撮影する機能を備えるとともに、その各撮影範囲の重複部分に上記枠体の溝が含まれ、複数回の撮影により得られた各X線投影データを用いて再構成した各3次元断層像を結合して一つの3次元断層像を得るに当たり、上記溝の形状情報を利用する画像処理手段を備えていることを特徴とする請求項1または2に記載のX線CT装置。
【請求項1】
互いに対向配置されたX線発生装置とX線検出器の間に、試料を搭載してX線発生装置のX線焦点とX線検出器の中心とを結ぶ線に直交する回転軸を中心として回転する回転テーブルが設けられ、その回転テーブルの駆動により試料に回転を与えつつその微小回転角度ごとに取り込んだ試料のX線投影データを用いて、上記回転軸に直交する面に沿った試料の断層像を構築する再構成演算手段を備えたX線CT装置において、
上記回転テーブル上で試料を収容する筒状の枠体を備え、その枠体は、試料を収容すべく上記回転テーブル上に配置された状態で、上記回転中心軸に略直交する方向に伸びる少なくとも1本の溝が形成されていることを特徴とするX線CT装置。
【請求項2】
上記枠体のX線投影データに基づく画像情報から、撮影された試料の断層像の倍率を与える変換係数を算出する変換係数演算手段を備えていることを特徴とする請求項1に記載のX線CT装置。
【請求項3】
当該X線CT装置が、上記回転テーブルを1回転させて得たX線投影データを用いて、試料の3次元情報を得ることのできるX線CT装置であって、1回の撮影後に上記X線発生装置とX線検出器の対と回転テーブルとを回転軸に沿った方向に相対移動させ、移動後の撮影範囲が先の撮影範囲とが回転軸方向に一部重複するように撮影する機能を備えるとともに、その各撮影範囲の重複部分に上記枠体の溝が含まれ、複数回の撮影により得られた各X線投影データを用いて再構成した各3次元断層像を結合して一つの3次元断層像を得るに当たり、上記溝の形状情報を利用する画像処理手段を備えていることを特徴とする請求項1または2に記載のX線CT装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−163254(P2007−163254A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−358869(P2005−358869)
【出願日】平成17年12月13日(2005.12.13)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月13日(2005.12.13)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]