
XYステージ
【課題】バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を、高精度に識別して測定可能な機能を備えるXYステージを実現する。
【解決手段】プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離づつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備える。
【解決手段】プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離づつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダに配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、使用に先立ってバーミラーの形状、スライダの走り、スライダの回転量(ヨーイング角)を測定する機能に関するものである。
【背景技術】
【0002】
プラテンと、その上面をX軸方向及びY軸方向にスライドして位置制御されるスライダを有する平面位置決め装置(XYステージ)の構造及びスライダ位置のフィードバック制御技術並びにスライダの回転抑制制御については、特許文献1に開示されている。
【0003】
プラテン上でのスライダの位置を、プラテンのX軸方向及びY軸方向に沿って夫々固定配置されたレーザ干渉計と、スライダに搭載されてこのレーザ干渉計の照射ビームを反射するY軸バーミラー及びX軸バーミラーとを用いて検出する平面位置決め装置は、特許文献2に開示されている。
【0004】
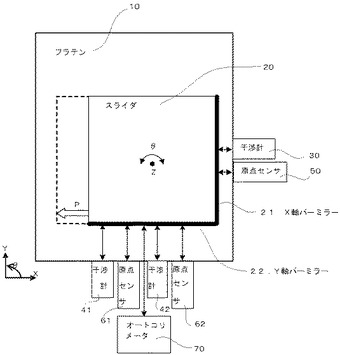
図6は、スライダに搭載されたX軸バーミラー及びY軸バーミラーを有する従来のXYステージの構成例を示す機能ブロック図である。プラテン10の上面をX軸方向及びY軸方向にスライドして位置制御されるスライダ20は、Y軸方向の一辺に固定されたX軸バーミラー21と、隣り合うX軸方向の一辺に固定されたY軸バーミラー22を有する。
【0005】
X軸バーミラー21と対峙するプラテン10の一辺近傍には、レーザ干渉計30が固定配置される。レーザ干渉計30は、X軸バーミラー21にレーザ光を照射して反射光との干渉でスライダ20のX軸方向距離を測定する。
【0006】
Y軸バーミラー22と対峙するプラテン10の一辺近傍には、所定距離を隔ててスライダ20のY軸方向距離を測定する2個のレーザ干渉計41及び42が固定配置されている。2個のレーザ干渉計41,42の距離測定値に基づいてスライダ20のZ軸方向の回転角θが計測される。
【0007】
レーザ干渉計30及び干渉計41,42は、X軸バーミラー21及びY軸バーミラー22との距離の変化をリアルタイムに測定し、サーボ制御系に位置フィードバックしている。スライダ20のθ方向変位は、レーザ干渉計41,42の計測値の差分より算出している。
【0008】
レーザ干渉計30に併設して原点センサ50が固定配置され、スライダ20のX軸方向の原点位置を計測する。レーザ干渉計41,42に併設して原点センサ61,62が固定配置され、スライダ20のY軸方向の原点位置を計測する。これら原点センサは、スライダ20の位置サーボ制御の前に、ステップモータモードで初期位置に移動するための位置センサである。
【0009】
Y軸バーミラー22が撓んでいると、スライダ20がZ軸回りにθ方向に回転する。その撓みが非常に大きい場合は、スライダ20がθ方向に大きく回転して、レーザ干渉計41,42への戻り光が減少し、レーザ干渉計による位置計測ができなくなる。
【0010】
この結果、サーボ制御が不能となり、生産途中で装置が異常停止する。更に2次被害として、装置自体の損傷を招く場合すらあり得る。これらは、ユーザにとっては大きな損失となるので、撓みが許容範囲内にあるかをチェックする必要がある。
【0011】
バーミラーの撓みを計測する手法としては、高精度の距離測定ができるオートコリメータ70を用いる方法がある。スライダ20をX,Y,θ軸サーボ制御を行っている状態で、X方向(矢印P)に動かし、その間のオートコリメータ70の測定値変化を観測する。Y軸バーミラー22が撓んでいなければ、測定値変化はない。
【0012】
【特許文献1】特開2000−65970号公報
【特許文献2】特開2005−9952号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
従来の手法では、次のような問題がある。
(1)スライダの動きが非直線的な動作(うねり状の動作)となった場合には、正確なバーミラー形状を把握することができない。
【0014】
(2)撓みの測定値は、バーミラーの形状、スライダの走り、スライダのヨーイング角の情報が混在した値であり、これらを個別に把握し正確なバーミラー形状を特定することができない。
【0015】
(3)バーミラーの変形は、XYステージにおいてμmオーダーでの位置検出と位置決め制御を困難とするが、従来の手法ではバーミラーの変形を高精度で事前に評価して品質を保証することが困難である。
【0016】
本発明は上述した問題点を解決するためになされたものであり、バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を、高精度に識別して測定可能な機能を備えるXYステージの実現を目的としている。
【課題を解決するための手段】
【0017】
このような課題を達成するために、本発明は次の通りの構成になっている。
(1)プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダに配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離ずつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備えることを特徴とするXYステージ。
【0018】
(2)前記バーミラー形状演算装置は、前記3個の距離計の測定値を取得し、3点測量法に基づいて前記距離計の配置外の前記バーミラーの形状を補間演算することを特徴とする(1)に記載のXYステージ。
【0019】
(3)前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との平均値によりスライダの走りを演算することを特徴とする(1)または(2)に記載のXYステージ。
【0020】
(4)前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との差を前記距離計の間隔で除した値によりスライダのヨーイング角を演算することを特徴とする(1)乃至(3)のいずれかに記載のXYステージ。
【発明の効果】
【0021】
本発明の構成によれば、次のような効果を期待することができる。
(1)スライダの動きが非直線的な動作(うねり状の動作)となった場合でも、正確なバーミラー形状を把握することができる。
【0022】
(2)バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を個別に把握し正確なバーミラー形状を特定することができる。
【0023】
(3)バーミラーの変形をμmオーダーで評価することが可能であり、出荷時のバーミラー品質保証が容易となる。
【発明を実施するための最良の形態】
【0024】
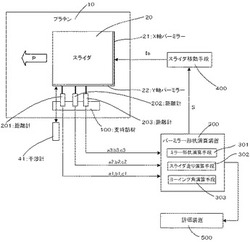
以下、本発明を図面により詳細に説明する。図1は、本発明を適用したXYステージの一実施形態を示す機能ブロック図である。図6で説明した従来のXYステージと同一要素には同一符号を付して説明を省略する。
【0025】
図1の実施形態は、Y軸バーミラー22の形状測定の構成を示しているが、X軸バーミラー21の形状測定の場合にも同様な構成をとればよい。Y軸バーミラー22に近接して固定配置された支持部材100に、3個の距離計201,202,203がX軸方向に間隔Isで等間隔に固定配置され、夫々基準位置からY軸方向のバーミラー22までの距離を測定している。
【0026】
これら3個の距離計201,202,203としては、接触型または非接触型で分解能が0.1μm程度の市販の電気マイクロメータを使用することができる。3個の距離計は、3点を同時に測定し、測定基準を設けるため、平面度の高い基準面(μmオーダー)で距離測定値のゼロセットを行なう。
【0027】
バーミラー形状演算装置300は、スライダ移動手段400に移動指令Sを与え、初期位置からX軸P方向に、距離計の配置間隔Isづつ2回移動操作させる。この移動操作は、図6で説明した原点センサ50を利用したパルスモータモードによるX軸方向の操作手段を利用することができる。
【0028】
バーミラー形状演算装置300は、3個の距離計201,202,203の初期位置での測定1回目の測定値a1,a2,a3、スライダ20をIs移動させた測定2回目の測定値b1,b2,b3、スライダ20を更にIs移動させた測定3回目の測定値c1,c2,c3を取得する。
【0029】
バーミラー形状演算装置300は、3回の測定で取得した測定値を演算するミラー形状演算手段301、スライダ走り演算手段302、ヨーイング角演算手段303よりなる。これら演算手段による演算結果が評価装置500に出力され、所定の閾値と比較されてバーミラーの品質が評価される。
【0030】
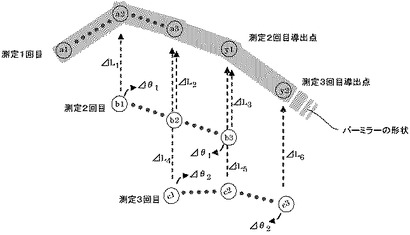
図2は、本発明によるバーミラー形状の測定手法を説明するイメージ図である。本図では、スライダ20を2回(n=2)移動させ、3回目までの測定が行われた状態を示している。バーミラーの形状は、測定1回目の実測値値a1,a2,a3並びに測定2回目のデータに基づく導出点y1及び、測定3回目のデータに基づく導出点y2で特定される。
【0031】
測定2回目の測定値b1と測定1回目の測定値a1との差をΔL1、b2とa3との差をΔL2、b3とy1との差をΔL3で示す。測定3回目の測定値c1と測定1回目の測定値a3との差をΔL4、c2とy1との差をΔL5、c3とy2との差をΔL6で示す。
【0032】
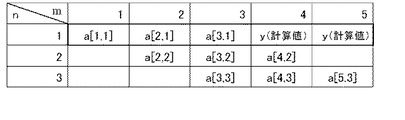
図3は、測定点と測定回数に基づいて演算される形状の座標を示す表である。測定点番号をm、測定回数をnとすれば、形状の導出に必要な各座標は、a[m,n]と表すことができる。これは、周知の3点測量法の手法である。
【0033】
行列式として考えれば、ΔL1,ΔL2,ΔL3は、式(1),(2),(3)で表記される。
【0034】

【0035】
【0036】
【0037】
ΔL3は、式(3)で明らかなように、ΔL2にΔL1とΔL2との差を加算する補間演算を実行して導出点y1を推定している。バーミラーの形状把握として必要な座標は、式(4)で導出することができる。導出点y2も同様な手法で推定している。
【0038】
【0039】
スライダの走りは、ΔL1とΔL2の平均値を与える式(5)で演算することができる。
【0040】
【0041】
ヨーイング角Δθは、ΔL1とΔL2との差を距離計間隔Isで除した式(6)で近似演算することができる。
【0042】
【0043】
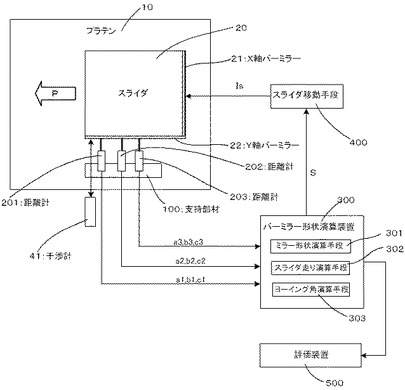
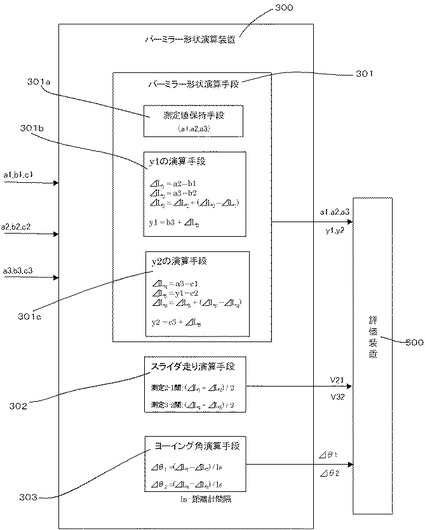
図4は、本発明を適用したバーミラー形状測定装置300の一実施形態を示す機能ブロック図である。バーミラー形状演算手段301は、実測された測定値保持手段301a、y1の演算手段301b、y2の演算手段301cよりなる。これらによる保持データa1,a2,a3及び演算データy1,y2が、バーミラーの形状情報として評価装置500に出力される。
【0044】
スライダ走り演算手段302は、式(5)に従い、測定1回目と測定2回目の走りV21及び測定2回目と測定3回目の走りV32を演算して評価装置500に出力する。ヨーイング角演算手段303は、式(6)に従い、測定2回目のヨーイング角Δθ1及びΔθ2を演算して評価装置500に出力する。
【0045】
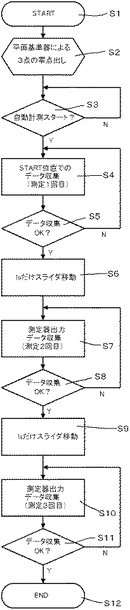
図5は、本発明によるバーミラー形状の測定手法の手順を示すフローチャートである。ステップS1でスタートし、ステップS2で平面基準器による3点のゼロ点出し、すなわちゼロセットを実行する。
【0046】
ステップS3のチェックで自動計測がスタートすると、ステップS4でスタート位置での測定1回目のデータ収集を実行する。ステップS5でのデータ収集チェックでOKであればステップS6でスライダをIs移動させる。
【0047】
以下同様な手順でステップS7及びS8で測定2回目のデータ収集を実行し、ステップS9でスライダをIs移動させ、ステップS10及びS11で測定3回目のデータ収集を実行し、ステップS12で終了する。
【0048】
実施形態では、バーミラー形状測定装置300は、バーミラーの形状、スライダの走り、スライダのヨーイング角の3者を演算して出力しているが、これら演算の実行は必要に応じて選択的であってもよい。
【0049】
実施形態では、Y軸バーミラー22の形状測定について説明したが、スライダ20がX軸バーミラー21を備える場合には、同様な手法によりX軸バーミラー21の評価を実行することができる。
【図面の簡単な説明】
【0050】
【図1】本発明を適用したXYステージの一実施形態を示す機能ブロック図である。
【図2】本発明によるバーミラー形状の測定手法を説明するイメージ図である。
【図3】測定点と測定回数に基づいて演算される形状の座標を示す表である。
【図4】本発明を適用したバーミラー形状測定装置の一実施形態を示す機能ブロック図である。
【図5】本発明によるバーミラー形状の測定手法の手順を示すフローチャートである。
【図6】従来のXYステージの構成例を示す機能ブロック図である。
【符号の説明】
【0051】
10 プラテン
20 スライダ
21 X軸バーミラー
22 Y軸バーミラー
41 干渉計
100 支持部材
201,202,203 距離計
300 バーミラー形状演算装置
301 ミラー形状演算手段
302 スライダ走り演算手段
303 ヨーイング角演算手段
400 スライダ移動手段
500 評価装置
【技術分野】
【0001】
本発明は、プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダに配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、使用に先立ってバーミラーの形状、スライダの走り、スライダの回転量(ヨーイング角)を測定する機能に関するものである。
【背景技術】
【0002】
プラテンと、その上面をX軸方向及びY軸方向にスライドして位置制御されるスライダを有する平面位置決め装置(XYステージ)の構造及びスライダ位置のフィードバック制御技術並びにスライダの回転抑制制御については、特許文献1に開示されている。
【0003】
プラテン上でのスライダの位置を、プラテンのX軸方向及びY軸方向に沿って夫々固定配置されたレーザ干渉計と、スライダに搭載されてこのレーザ干渉計の照射ビームを反射するY軸バーミラー及びX軸バーミラーとを用いて検出する平面位置決め装置は、特許文献2に開示されている。
【0004】
図6は、スライダに搭載されたX軸バーミラー及びY軸バーミラーを有する従来のXYステージの構成例を示す機能ブロック図である。プラテン10の上面をX軸方向及びY軸方向にスライドして位置制御されるスライダ20は、Y軸方向の一辺に固定されたX軸バーミラー21と、隣り合うX軸方向の一辺に固定されたY軸バーミラー22を有する。
【0005】
X軸バーミラー21と対峙するプラテン10の一辺近傍には、レーザ干渉計30が固定配置される。レーザ干渉計30は、X軸バーミラー21にレーザ光を照射して反射光との干渉でスライダ20のX軸方向距離を測定する。
【0006】
Y軸バーミラー22と対峙するプラテン10の一辺近傍には、所定距離を隔ててスライダ20のY軸方向距離を測定する2個のレーザ干渉計41及び42が固定配置されている。2個のレーザ干渉計41,42の距離測定値に基づいてスライダ20のZ軸方向の回転角θが計測される。
【0007】
レーザ干渉計30及び干渉計41,42は、X軸バーミラー21及びY軸バーミラー22との距離の変化をリアルタイムに測定し、サーボ制御系に位置フィードバックしている。スライダ20のθ方向変位は、レーザ干渉計41,42の計測値の差分より算出している。
【0008】
レーザ干渉計30に併設して原点センサ50が固定配置され、スライダ20のX軸方向の原点位置を計測する。レーザ干渉計41,42に併設して原点センサ61,62が固定配置され、スライダ20のY軸方向の原点位置を計測する。これら原点センサは、スライダ20の位置サーボ制御の前に、ステップモータモードで初期位置に移動するための位置センサである。
【0009】
Y軸バーミラー22が撓んでいると、スライダ20がZ軸回りにθ方向に回転する。その撓みが非常に大きい場合は、スライダ20がθ方向に大きく回転して、レーザ干渉計41,42への戻り光が減少し、レーザ干渉計による位置計測ができなくなる。
【0010】
この結果、サーボ制御が不能となり、生産途中で装置が異常停止する。更に2次被害として、装置自体の損傷を招く場合すらあり得る。これらは、ユーザにとっては大きな損失となるので、撓みが許容範囲内にあるかをチェックする必要がある。
【0011】
バーミラーの撓みを計測する手法としては、高精度の距離測定ができるオートコリメータ70を用いる方法がある。スライダ20をX,Y,θ軸サーボ制御を行っている状態で、X方向(矢印P)に動かし、その間のオートコリメータ70の測定値変化を観測する。Y軸バーミラー22が撓んでいなければ、測定値変化はない。
【0012】
【特許文献1】特開2000−65970号公報
【特許文献2】特開2005−9952号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
従来の手法では、次のような問題がある。
(1)スライダの動きが非直線的な動作(うねり状の動作)となった場合には、正確なバーミラー形状を把握することができない。
【0014】
(2)撓みの測定値は、バーミラーの形状、スライダの走り、スライダのヨーイング角の情報が混在した値であり、これらを個別に把握し正確なバーミラー形状を特定することができない。
【0015】
(3)バーミラーの変形は、XYステージにおいてμmオーダーでの位置検出と位置決め制御を困難とするが、従来の手法ではバーミラーの変形を高精度で事前に評価して品質を保証することが困難である。
【0016】
本発明は上述した問題点を解決するためになされたものであり、バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を、高精度に識別して測定可能な機能を備えるXYステージの実現を目的としている。
【課題を解決するための手段】
【0017】
このような課題を達成するために、本発明は次の通りの構成になっている。
(1)プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダに配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離ずつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備えることを特徴とするXYステージ。
【0018】
(2)前記バーミラー形状演算装置は、前記3個の距離計の測定値を取得し、3点測量法に基づいて前記距離計の配置外の前記バーミラーの形状を補間演算することを特徴とする(1)に記載のXYステージ。
【0019】
(3)前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との平均値によりスライダの走りを演算することを特徴とする(1)または(2)に記載のXYステージ。
【0020】
(4)前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との差を前記距離計の間隔で除した値によりスライダのヨーイング角を演算することを特徴とする(1)乃至(3)のいずれかに記載のXYステージ。
【発明の効果】
【0021】
本発明の構成によれば、次のような効果を期待することができる。
(1)スライダの動きが非直線的な動作(うねり状の動作)となった場合でも、正確なバーミラー形状を把握することができる。
【0022】
(2)バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を個別に把握し正確なバーミラー形状を特定することができる。
【0023】
(3)バーミラーの変形をμmオーダーで評価することが可能であり、出荷時のバーミラー品質保証が容易となる。
【発明を実施するための最良の形態】
【0024】
以下、本発明を図面により詳細に説明する。図1は、本発明を適用したXYステージの一実施形態を示す機能ブロック図である。図6で説明した従来のXYステージと同一要素には同一符号を付して説明を省略する。
【0025】
図1の実施形態は、Y軸バーミラー22の形状測定の構成を示しているが、X軸バーミラー21の形状測定の場合にも同様な構成をとればよい。Y軸バーミラー22に近接して固定配置された支持部材100に、3個の距離計201,202,203がX軸方向に間隔Isで等間隔に固定配置され、夫々基準位置からY軸方向のバーミラー22までの距離を測定している。
【0026】
これら3個の距離計201,202,203としては、接触型または非接触型で分解能が0.1μm程度の市販の電気マイクロメータを使用することができる。3個の距離計は、3点を同時に測定し、測定基準を設けるため、平面度の高い基準面(μmオーダー)で距離測定値のゼロセットを行なう。
【0027】
バーミラー形状演算装置300は、スライダ移動手段400に移動指令Sを与え、初期位置からX軸P方向に、距離計の配置間隔Isづつ2回移動操作させる。この移動操作は、図6で説明した原点センサ50を利用したパルスモータモードによるX軸方向の操作手段を利用することができる。
【0028】
バーミラー形状演算装置300は、3個の距離計201,202,203の初期位置での測定1回目の測定値a1,a2,a3、スライダ20をIs移動させた測定2回目の測定値b1,b2,b3、スライダ20を更にIs移動させた測定3回目の測定値c1,c2,c3を取得する。
【0029】
バーミラー形状演算装置300は、3回の測定で取得した測定値を演算するミラー形状演算手段301、スライダ走り演算手段302、ヨーイング角演算手段303よりなる。これら演算手段による演算結果が評価装置500に出力され、所定の閾値と比較されてバーミラーの品質が評価される。
【0030】
図2は、本発明によるバーミラー形状の測定手法を説明するイメージ図である。本図では、スライダ20を2回(n=2)移動させ、3回目までの測定が行われた状態を示している。バーミラーの形状は、測定1回目の実測値値a1,a2,a3並びに測定2回目のデータに基づく導出点y1及び、測定3回目のデータに基づく導出点y2で特定される。
【0031】
測定2回目の測定値b1と測定1回目の測定値a1との差をΔL1、b2とa3との差をΔL2、b3とy1との差をΔL3で示す。測定3回目の測定値c1と測定1回目の測定値a3との差をΔL4、c2とy1との差をΔL5、c3とy2との差をΔL6で示す。
【0032】
図3は、測定点と測定回数に基づいて演算される形状の座標を示す表である。測定点番号をm、測定回数をnとすれば、形状の導出に必要な各座標は、a[m,n]と表すことができる。これは、周知の3点測量法の手法である。
【0033】
行列式として考えれば、ΔL1,ΔL2,ΔL3は、式(1),(2),(3)で表記される。
【0034】
【0035】
【0036】
【0037】
ΔL3は、式(3)で明らかなように、ΔL2にΔL1とΔL2との差を加算する補間演算を実行して導出点y1を推定している。バーミラーの形状把握として必要な座標は、式(4)で導出することができる。導出点y2も同様な手法で推定している。
【0038】
【0039】
スライダの走りは、ΔL1とΔL2の平均値を与える式(5)で演算することができる。
【0040】
【0041】
ヨーイング角Δθは、ΔL1とΔL2との差を距離計間隔Isで除した式(6)で近似演算することができる。
【0042】
【0043】
図4は、本発明を適用したバーミラー形状測定装置300の一実施形態を示す機能ブロック図である。バーミラー形状演算手段301は、実測された測定値保持手段301a、y1の演算手段301b、y2の演算手段301cよりなる。これらによる保持データa1,a2,a3及び演算データy1,y2が、バーミラーの形状情報として評価装置500に出力される。
【0044】
スライダ走り演算手段302は、式(5)に従い、測定1回目と測定2回目の走りV21及び測定2回目と測定3回目の走りV32を演算して評価装置500に出力する。ヨーイング角演算手段303は、式(6)に従い、測定2回目のヨーイング角Δθ1及びΔθ2を演算して評価装置500に出力する。
【0045】
図5は、本発明によるバーミラー形状の測定手法の手順を示すフローチャートである。ステップS1でスタートし、ステップS2で平面基準器による3点のゼロ点出し、すなわちゼロセットを実行する。
【0046】
ステップS3のチェックで自動計測がスタートすると、ステップS4でスタート位置での測定1回目のデータ収集を実行する。ステップS5でのデータ収集チェックでOKであればステップS6でスライダをIs移動させる。
【0047】
以下同様な手順でステップS7及びS8で測定2回目のデータ収集を実行し、ステップS9でスライダをIs移動させ、ステップS10及びS11で測定3回目のデータ収集を実行し、ステップS12で終了する。
【0048】
実施形態では、バーミラー形状測定装置300は、バーミラーの形状、スライダの走り、スライダのヨーイング角の3者を演算して出力しているが、これら演算の実行は必要に応じて選択的であってもよい。
【0049】
実施形態では、Y軸バーミラー22の形状測定について説明したが、スライダ20がX軸バーミラー21を備える場合には、同様な手法によりX軸バーミラー21の評価を実行することができる。
【図面の簡単な説明】
【0050】
【図1】本発明を適用したXYステージの一実施形態を示す機能ブロック図である。
【図2】本発明によるバーミラー形状の測定手法を説明するイメージ図である。
【図3】測定点と測定回数に基づいて演算される形状の座標を示す表である。
【図4】本発明を適用したバーミラー形状測定装置の一実施形態を示す機能ブロック図である。
【図5】本発明によるバーミラー形状の測定手法の手順を示すフローチャートである。
【図6】従来のXYステージの構成例を示す機能ブロック図である。
【符号の説明】
【0051】
10 プラテン
20 スライダ
21 X軸バーミラー
22 Y軸バーミラー
41 干渉計
100 支持部材
201,202,203 距離計
300 バーミラー形状演算装置
301 ミラー形状演算手段
302 スライダ走り演算手段
303 ヨーイング角演算手段
400 スライダ移動手段
500 評価装置
【特許請求の範囲】
【請求項1】
プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダに配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離ずつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備えることを特徴とするXYステージ。
【請求項2】
前記バーミラー形状演算装置は、前記3個の距離計の測定値を取得し、3点測量法に基づいて前記距離計の配置外の前記バーミラーの形状を補間演算することを特徴とする請求項1に記載のXYステージ。
【請求項3】
前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との平均値によりスライダの走りを演算することを特徴とする請求項1または2に記載のXYステージ。
【請求項4】
前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との差を前記距離計の間隔で除した値によりスライダのヨーイング角を演算することを特徴とする請求項1乃至3のいずれかに記載のXYステージ。
【請求項1】
プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダに配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離ずつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備えることを特徴とするXYステージ。
【請求項2】
前記バーミラー形状演算装置は、前記3個の距離計の測定値を取得し、3点測量法に基づいて前記距離計の配置外の前記バーミラーの形状を補間演算することを特徴とする請求項1に記載のXYステージ。
【請求項3】
前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との平均値によりスライダの走りを演算することを特徴とする請求項1または2に記載のXYステージ。
【請求項4】
前記バーミラー形状演算装置は、前回測定時の距離測定値と今回測定時の距離測定値との差を前記距離計の間隔で除した値によりスライダのヨーイング角を演算することを特徴とする請求項1乃至3のいずれかに記載のXYステージ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−128258(P2009−128258A)
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願番号】特願2007−305168(P2007−305168)
【出願日】平成19年11月27日(2007.11.27)
【出願人】(000006507)横河電機株式会社 (4,443)
【Fターム(参考)】
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願日】平成19年11月27日(2007.11.27)
【出願人】(000006507)横河電機株式会社 (4,443)
【Fターム(参考)】
[ Back to top ]