
株式会社IHIにより出願された特許
4,841 - 4,850 / 5,014
分岐用シールド掘進機の発進方法
【課題】 全長が既設トンネルの幅より長く、既設トンネル内で発進方向に向けて予め組立てるスペースがない分岐用シールド掘進機であっても、テールシールを容易に組立てる。
【解決手段】 既設トンネル1内でテールシール21の組立を行う分岐用シールド掘進機の発進方法において、分岐用シールド掘進機2の推力を受圧する反力受部材15をセグメント組付位置20よりも径方向内側に位置するように配置して分岐用シールド掘進機2のテールシール21の組立スペース22を確保しつつ、その反力受部材15から反力をとって分岐用シールド掘進機2を発進させるようにする。
(もっと読む)
分岐用シールドの発進口取付方法

【課題】 発進位置の芯合わせを精度よく行うことができ、止水性を確保できる分岐用シールドの発進口取付方法を提供する。
【解決手段】 既設トンネル1の発進坑口9から分岐用シールド2を発進させるべく取り付ける分岐用シールドの発進口取付方法において、分岐用シールド2のカッタ6とフード7に合体した状態でこれらを覆う発進口エントランス5を組み立てると共にこれらを上記発進坑口9となる壁10に当て、その状態で発進口エントランス5を既設トンネル1に仮付けし、カッタ6とフード7を後退させ、発進口エントランス5を既設トンネル1に溶接固定する。
(もっと読む)
Ni基単結晶超合金
成分が重量比で、Al:5.0重量%以上7.0重量%以下、Ta:4.0重量%以上10.0重量%以下、Mo:1.1重量%以上4.5重量%以下、W:4.0重量%以上10.0重量%以下、Re:3.1重量%以上8.0重量%以下、Hf:0重量%以上0.50重量%以下、Cr:2.0重量%以上5.0重量%以下、Co:0重量%以上9.9重量%以下、Ru:4.1重量%以上14.0重量%以下を含有し、残部がNiと不可避的不純物からなる組成を有するNi基単結晶超合金を採用することにより、高温下でのTCP相の析出を防止して強度の向上を図ることが可能なNi基単結晶超合金を提供する。 (もっと読む)
ボイラ負荷変化時先行制御方法及び装置
【課題】最終値が不明な負荷変化時にも適切なボイラ入力加速指令を出力して対応でき、燃料や給水等の制御の安定化を図り得るボイラ負荷変化時先行制御方法及び装置を提供する。
【解決手段】負荷上昇指令40又は負荷降下指令41が入力された時点から時間をカウントし、負荷上昇指令40又は負荷降下指令41の継続時間46に応じて予め設定されたボイラ入力加速指令25を出力するBIR回路26を備えることにより、ボイラの負荷変化時に対応するための先行制御系統23を構成する。
(もっと読む)
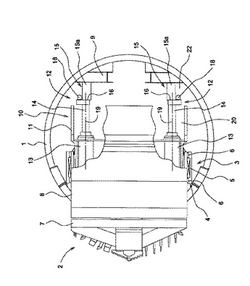
シールド掘進機の発進フード
【課題】 発進フードをシールド掘進機の外周に被嵌した状態で既設トンネル内を搬送する際に、発進フードの内周面に取り付けたシールの潰れ・損傷を防止し、発進フードに対する掘進機の同芯性が確保できる発進フードを提供する。
【解決手段】 シールド掘進機(分割片1)の外周部にスライド可能に被嵌された状態で既設トンネル3内を搬送される発進フード本体4xと、該発進フード本体4xの内周面に設けられ、該内周面と上記外周部との間を止水すべく周方向に沿ってリング状に形成されたシール6と、該シール6を挟むようにして上記内周面に設けられ、上記外周部を上記内周面から浮かせて支持するための隆起部8とを備えたもの。
(もっと読む)
浚渫搬送装置
【課題】 軟らかい堆砂から圧密された固い堆砂まで、効率良くかつ高い混砂比率で浚渫でき、回収した堆砂を離れた処理場まで直接搬送することができ、動力源が少なく、構造がシンプルで信頼性が高く、巨礫・流木も処理できる浚渫搬送装置を提供する。
【解決手段】 多関節アーム10c,10dとその先端に取り付けられたバケット11とを有し、台船9上に移動可能に載置されたバックフォー10と、多関節アームの先端アームに取り付けられた排砂ポンプ12と、排砂ポンプの吸引口とバケットに設けた吸入口とを連通する可撓性の吸引パイプ14と、排砂ポンプの吐出口と離れた処理場とを連通する可撓性の搬送パイプ16とを備える。排砂ポンプ12は、エジェクタポンプであり、エジェクタポンプに噴射する高圧水1を供給する高圧水供給装置18を台船上に備える。
(もっと読む)
圧延機の形状制御装置
【課題】 接触幅xが圧延材端部が接する回転ロータの幅Bの1/2より小さい場合でも、圧延中に圧延された板の平坦度を全幅に亘って精密に測定でき、かつ測定結果に対応して圧延用ワークロールのロール径を全幅に亘って精密に制御できる圧延機の形状制御装置を提供する。
【解決手段】 圧延機40で圧延された圧延板1の幅方向の形状精度を所定ピッチBの測定位置で測定する形状測定ローラ50と、上下のワークロール42の幅方向に前記ピッチBで配置され各ワークロールの所定の冷却位置にクーラントを噴射する複数の噴射ノズル62を有する冷却装置60と、形状測定ローラで測定された形状精度に基づく各噴射ノズルのクーラント量を制御する制御装置70とを備え、形状測定ローラの測定位置と噴射ノズルの冷却位置が、常に圧延板の幅方向同一位置に対応するように、接触幅xが回転ロータの幅Bの1/2より小さい場合に、回転ロータ及び支持軸と噴射ノズルの両方を幅方向にピッチBの略1/2移動する。
(もっと読む)
シールド機のカッタ及び分岐シールド用カッタ
【課題】 高強度壁を良好にかつ安価に掘削できるシールド機のカッタを提供する。
【解決手段】 カッタフレーム7の前面に、そのカッタフレーム7の回転中心から外周にかけて多段に円周方向に沿ってシャンク材16、17を設けると共に、そのシャンク材16、17の両端に超硬チップ18、19を設けて先行ビット12、13を形成したシールド機のカッタ5において、カッタフレーム7の回転中心側に位置した先行ビット12のシャンク材16を、その先行ビットの回転軌跡の曲率に合わせて屈曲させ、カッタフレーム7の外周側に位置した先行ビット13のシャンク材17の厚さを超硬チップ19の切削幅より薄く形成したものである。
(もっと読む)
軌道追従制御方法および装置
【課題】 移動体を目標軌道に安定に追従させるに必要な制御指令を適切に得て、その軌道追従性能を高めることのできる軌道追従制御方法を提供する。
【解決手段】 目標軌道上の目標位置に対する前記移動体の前後方向のずれ量xeと前記移動体の横方向のずれ量yeとをそれぞれ求めると共に、前記目標軌道上での目標姿勢に対する前記移動体の向きずれ角φeをそれぞれ求め、上記向きのずれ角φeに応じて前記移動体の目標移動速度ud,γdと前記ずれ量xe,yeとから前記移動体に対する前後方向速度指令値ur、横方向速度指令値νr、および旋回速度指令値γrをそれぞれ計算する。そしてこれらの各速度指令値ur,νr,γrに従って前記移動体の進行速度、横行速度、および旋回速度をそれぞれ制御する。
(もっと読む)
ヨーレイト推定方法
【課題】 高価なヨーレイトセンサを用いることなく、例えば軌道追従制御に必要・十分なヨーレイトを簡易に、しかも適切に得ることのできるヨーレイト推定方法を提供する。
【解決手段】 左右に対をなす前輪および後輪を備えて上記前輪および/または後輪を操舵して走行駆動される4輪型の車両における旋回動作時のヨーレイトを求めるに際し、前記車両の旋回時における前記前輪および/または後輪を操舵角を検出すると共に、前記車両の走行速度を検出し、前記左右に対をなす前輪および後輪をそれぞれ前記車両の中心線上における前輪および後輪に置き換えた等価モデルにおける前記車両の操舵角を前記前輪および/または後輪の操舵角から求め、上記等価モデルにおける前記車両の操舵角から幾何学的に求められる前記車両の旋回半径Roと前記車両の走行速度Vとから前記車両の旋回速度γを推定する。
(もっと読む)
4,841 - 4,850 / 5,014
[ Back to top ]