
株式会社IHIにより出願された特許
4,901 - 4,910 / 5,014
ダイオキシン類及び臭素系ダイオキシン類の低減化方法
【課題】ダイオキシン類及び臭素系ダイオキシン類を比較的簡単な方法により効果的に低減する。
【解決手段】排ガスを急冷することによりダイオキシン類の生成を抑制し集塵装置7で排ガス中のダイオキシン類を含む飛灰を除去するようにしているダイオキシン類の低減化方法であって、集塵装置7入口の排ガス温度を160℃〜180℃に保持することでダイオキシン類の生成を抑制する。
(もっと読む)
ロータリージョイント、導波管およびその製造方法

【課題】 10MW以上の大電力で周波数10GHz以上のマイクロ波を伝送する場合でも、導波管内での放電を有効に防止でき、これにより安定したマイクロ波の伝送が可能な高周波伝送用ロータリージョイントを提供する。
【解決手段】 内部に高周波伝送用の中空の導波路12b,14bを有し同軸の軸心を中心に互いに回転可能に接続される一対の導波管12,14を備えた回転導波管であって、導波管12の円筒部内周面に沿って軸方向に周期的に現れる高電場位置Aに、前記円筒部内周面の構成物質よりも導電率の低い物質の被膜10が形成されている。
(もっと読む)
低質油の燃焼装置及び方法
【課題】 高炭素比燃料のような低質油を燃料として用い、カーボンの発生と堆積を抑制することができる低質油の燃焼装置及び方法を提供する。
【解決手段】 空気2を所定の低圧に圧縮する低圧圧縮機12と、圧縮された低圧空気3a,3bを所定の高圧に圧縮する高圧圧縮機14と、圧縮された高圧空気4を用いて低質油1を燃焼させる燃焼器16とを備える。更に、低圧圧縮機12と高圧圧縮機14の間に、燃焼器16における高圧空気4の温度が、低質油1の燃焼時にカーボンの発生及び堆積を抑制する所定の温度域(250℃以上、300℃以下)になるように、圧縮された低圧空気3aを冷却する中間冷却器18を備える。
(もっと読む)
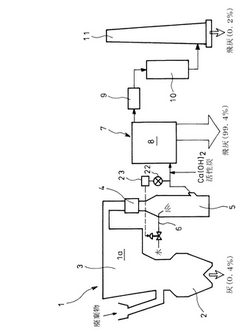
薬液計量投入装置
【課題】機械的要素のみの構成により作業に要する作業者の手間を削減できるようにする。
【解決手段】薬液貯蔵タンク7から薬液1を吐出する薬液吐出口2に開閉レバー4を備えた開閉弁3を設ける。薬液吐出口2の下方位置に、内部に貯留される薬液1が所定量に達すると回転軸9を支点として転倒動作する計量容器5を設ける。計量容器5の上端部に、計量容器5の転倒動作に伴って開閉弁3の開閉レバー4を閉操作するための弁閉ストライカ6を設ける。支持部材11の間に、空の計量容器5の下端部を受けるストッパ13を設ける。作業者が開閉弁3の開閉レバー4を開操作すると、薬液吐出口2から計量容器5内へ受けられて貯留される薬液1が所定量に達した時点で計量容器5が転倒することにより、弁閉ストライカ6にて開閉レバー4を閉操作させて以降の薬液供給を停止させると共に、計量容器5内に貯留された所定量の薬液1を排出して自動投入させる。
(もっと読む)
回転体及びそのコーティング方法
動翼等の回転体と、cBN等の硬質材を含む放電電極とを加工液中又は気中にて、回転体の先端部と放電電極との間に放電用電源によりパルス状の放電を発生させることによって放電電極を溶融し、その一部を回転体の先端部に付着させ、cBN等の硬質材を含むアブレイシブ性被膜を形成する。 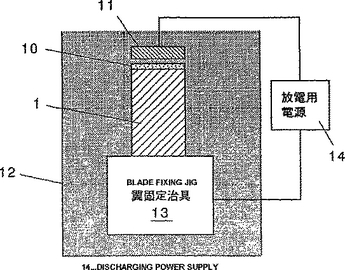 (もっと読む)
(もっと読む)
物体識別方法および装置
【課題】 砲弾のX線透視画像からその特徴量(特徴情報)を精度良く求めて砲弾の種別を精度良く識別することのできる物体識別方法および装置を提供する。
【解決手段】 砲弾における損壊し易い部品部分の画像成分をX線透視画像から除去した後、前記X線透視画像の輝度ヒストグラムに従って前記砲弾の外形や構造を検出する為の閾値を決定し、この閾値に基づいてX線透視画像から抽出された画像成分から前記砲弾の特徴量を検出してその種別を判定する。特に肉厚の砲弾底部を基準として砲弾の特徴量を検出する。
(もっと読む)
粉砕分級装置
【課題】 粉砕と分級を単一の装置で行うことができ、粗粒子の再循環を内部で行うことができ、粉砕時に一旦分散した粒子を再凝集させることなく分級でき、粉砕し旋回流に同伴された粒子をその旋回流内で分級することができ、これにより分級性能を高め、動力損失を低減することができる粉砕分級装置を提供する。
【解決手段】 外部から回転駆動され鉛直軸を中心に回転する回転軸12と、円筒形の回転ロータ14aとこれを囲む円筒形の固定ライナ14bとを有しその間隙で粉体1を粉砕する粉砕機14と、粉砕機の粉体出口側に位置し粉砕後の粉体を微粒子4と粗粒子5に分級する分級機16と、粉砕機に粉体1を供給する粉体供給ダクト20と、分級機で分級された粗粒子5を粉体供給ダクトに再循環させる再循環装置22とを備える。
(もっと読む)
可搬式自動加工装置
【課題】 既設構造物などに対して持ち運んで自動加工を行うことが出来るとともに、必要な精度を確保することができる可搬式自動加工装置を提供すること。
【解決手段】 加工基準点Oとこれから一定位置O’に加工用ロボット11を設置し、これを制御手段13に予め入力したプログラムで制御して加工を行うことで、可搬式の加工用ロボット11を用いて現場で自動加工を行うようにする。
容易にできるようにしている。
これにより、複雑な形状のスカラップ孔Fであっても自動加工することができ、高精度に加工でき、作業者の負担を大幅に軽減できるとともに、切削油などを使用することで、工具の寿命を延長し、効率良く短時間に加工することができる。
(もっと読む)
溶接部可視化方法及び装置
【課題】板厚差のある被溶接材同士の突合せ溶接部であっても、影の影響を受けることなく観察できるようにする。
【解決手段】板厚差のある被溶接材10a,10b同士を突合せ配置した開先部11の真上となる垂直面内に、溶接部12を撮影するためのCCDカメラ13を、観測対象法線14より所要角度傾斜させて設ける。開先部11真上の垂直面内に、フラッシュランプ15を、観測対象法線14を対称軸とするCCDカメラ13と対称な角度配置より±10°〜20°ずれた角度配置で設ける。開先部11の真上に配置してあるフラッシュランプ15より照明光を照射することにより、被溶接材10a,10b同士の突合せ溶接部12に影が発生する虞を解消させる。フラッシュランプ15より溶接部12へ照射する高輝度照明光の正反射成分がCCDカメラ13へ強く入射しないようにして、画像処理に適した輝度の溶接部12画像を得るようにさせる。
(もっと読む)
小型飛行装置
【課題】突風中の飛行においても高度な飛行性能を達成できるようにする。
【解決手段】胴体1の前部左右位置と後部左右位置の4個所に、翼駆動用モータ3を、前後方向の垂直面内で上下方向角度変更可能に設ける。翼駆動用モータ3の出力軸3aに、胴体1外方に延びる駆動ロッド9と、柔軟性を有する連結ロッド11及び翼本体10からなる羽ばたき翼2a,2b,2c,2dをそれぞれ取り付ける。羽ばたき翼2a,2b,2c,2dを翼駆動用モータ3と共に垂直方向上向きに配して羽ばたき作動させることにより下向きの後流を発生させ、その反力により、垂直上昇、降下、ホバリングを行わせる。羽ばたき翼2a,2b,2c,2dを所要迎角で配置して羽ばたき作動させることにより後斜め下向きの後流を発生させ、その反力で、揚力と推進力を得て前進飛行させる。更に、左右の推進力のバランスを変化させることで左右へ旋回させる。
(もっと読む)
4,901 - 4,910 / 5,014
[ Back to top ]