
株式会社ダイヘンにより出願された特許
91 - 100 / 990
電力変換装置及び電力変換装置の制御方法
【課題】スイッチング周波数変調制御を適切に行い、変換効率の高効率化を図ることができる電力変換装置を提供する。
【解決手段】インバータ回路11のスイッチング周波数の算出に際し、コンバータ10の受動部品損失及びスイッチング損失を含み、入力電圧、入力電力、デッドタイムを変数としたスイッチング周波数fswに関する損失関数Gが用いられる。そして、その損失関数Gから算出されたスイッチング周波数fswにてインバータ回路11の制御(PFM制御)を行うことで、その時々でコンバータ10の損失が最小、即ち変換効率が高効率となるようなコンバータ10の動作が可能となる。
(もっと読む)
画像判別装置、画像特定装置、この画像特定装置を備えた作業工程管理システム、および、プログラム

【課題】画像の照合にかかる時間を可及的に短くし、かつ、適切に画像の照合をすることができる画像判別装置を提供する。
【解決手段】基準マスタ画像における特徴部位を指定する特徴指定部441と、マスタ画像において特徴部位を検出する特徴検出部442と、検出された特徴部位を基準マスタ画像における特徴部位に一致させるように、マスタ画像を変換する画像変換手段443と、撮像画像において特徴部位を検出する特徴検出部446と、検出された特徴部位を基準マスタ画像における特徴部位に一致させるように、撮像画像を変換する画像変換手段447と、変換後マスタ画像の指定色部分と変換後撮像画像の指定色部分とが一致するか否かを判別する判別部449とを備え、判別部449によって一致すると判別された場合に、撮像画像の被写体がマスタ画像の被写体と一致すると判別するようにした。
(もっと読む)
プラズマミグ溶接の監視方法
【課題】プラズマミグ溶接方法において、プラズマ電極1bと溶接ワイヤ1aとの間に発生する異常なアーク放電を防止する。
【解決手段】プラズマ電極1bと母材2との間にプラズマアーク3bを発生させる。溶接ワイヤ1aと母材2との間にミグアーク1aを発生させる。溶接を開始する前に、プラズマ電極1bの先端と母材2との距離であるトーチ高さLtを設定し、このトーチ高さLtの設定値及びプラズマ溶接電流の設定値Irを入力としてアーク特性関数によってプラズマ溶接電圧Vwpを推定し、このプラズマ溶接電圧Vwpの推定値とミグ溶接電圧の設定値Vrとの設定電圧差が基準電圧値よりも大きいときは異常なアーク放電が発生すると判別して警報を発する。警報が発せられたときは、溶接条件を見直すことで異常なアーク放電を防止することができる。
(もっと読む)
変流器を備えた電気機器及びこの電気機器に用いる変流器保護用短絡子
【課題】変流器が使用されないときに、その保護を図るために変流器の二次側を短絡する短絡子を備えた電気機器を提供する。
【解決手段】電気機器本体を変流器と共に収容したケース3に、変流器の二次コイルに接続されたコンタクトを有するレセプタクル4が取り付けられている。レセプタクル4の複数のコンタクトに接続される複数の短絡用接触子11a〜11gを備えた短絡子本体11を絶縁キャップ12内に収容した構造を有する短絡子10が設けられる。短絡子10の絶縁キャップ12は、レセプタクルのコンタクトを保持している絶縁支持物403に被さる形状を有し、レセプタクルボディ401にメタルキャップ20をネジ結合した際に、短絡子10の絶縁キャップ12がメタルキャップ20内に受け入れられて、短絡子本体11とメタルキャップ20との間を絶縁する。
(もっと読む)
高周波電源装置及びその制御方法
【課題】包絡線がステップ状のレベル変化を示すように変調された電圧波形を有する高周波電力を得る際に、レベル変化時にリンギングや波形鈍りが生じるのを防ぐことができる高周波電源装置の制御方法を提供する。
【解決手段】高周波電力の電圧波形の包絡線の波形がレベル変化を示すタイミングから設定された過渡期間が経過するまでの期間は、高周波信号発生・増幅部1をオープンループ制御することにより高周波電力の電圧波形の包絡線のレベルを目標レベルに一致させる制御を行ない、高周波電力の電圧波形の包絡線の波形がレベル変化を示すタイミングから過渡期間が経過した後のインターバル期間においては、高周波電力の電圧波形の包絡線レベルの検出値に基づいて、高周波信号発生・増幅部1をフィードバック制御することにより、高周波電力の電圧波形の包絡線のレベルを目標レベルとするように制御する。
(もっと読む)
TIG溶接トーチ
【課題】TIGトーチにおいて、部品交換作業を容易とする。
【解決手段】コレットボディ14とフロントコレット16とが連結されていることから、(a)に示されるように、トーチボディ12からコレットボディ14を取り外すことで、フロントコレット16も一体にトーチボディ12から抜き取られる。又、タングステン電極18をセットする際にも、コレットボディ14にタングステン電極18を挿入することで、コレットボディ14に連結されたフロントコレット16へと、タングステン電極18が円滑に案内される。又、コレットボディ14とフロントコレット16とが、相対回転可能に連結されていることから、コレットボディ14とフロントコレット16との一体物をトーチボディ12の内径部12a、12cに挿入し、コレットボディ14を回転させて、トーチボディ12にねじ止めを行うことが可能となる。
(もっと読む)
溶接ロボットシステム
【課題】非接触式センサの溶接部位検出器を使用せずにギャップ長を算出することができる溶接ロボットシステムを提供する。
【解決手段】本発明の溶接ロボットシステムは、スポット溶接ロボットSRの上部電極基準位置算出回路4が、スポット溶接を行う前に上部電極1aを下部電極1bに接触させたときの上部電極基準位置を算出し、ギャップ長検出時上部電極位置算出回路5が、下部電極1bの上に母材Wを置いてスポット溶接を行うときに、上部電極1aを母材Wに接触させたときのギャップ長検出時上部電極位置を算出し、ギャップ長算出回路10が板厚と上部電極基準位置とギャップ長検出時上部電極位置とからギャップ長GLを算出し、スポット溶接を行う。アーク溶接ロボットARがギャップ長GLに対応して溶接条件を変更してアーク溶接を行う。仮付けと同時にギャップ長GLを算出することができる。
(もっと読む)
ポジショナ
【課題】
集電手段に接続された溶接用ケーブルに無理な力が加わることがないとともに、溶接用ケーブルに集電ブラシが引っ張られて集電ブラシの動作の阻害及び集電ブラシと集電リングの接触面積が小さくなることを抑制できるポジショナを提供する。
【解決手段】
ポジショナは、支持ベースに設けられた収納室12に外部電源接続用の溶接用ケーブル50を収納し、収納された溶接用ケーブル50の集電装置30側を非拘束の遊びがある状態にして、集電装置30側端部を収納室12から外部に導出するとともにブスバー40に設けられた接続片に接続する。
(もっと読む)
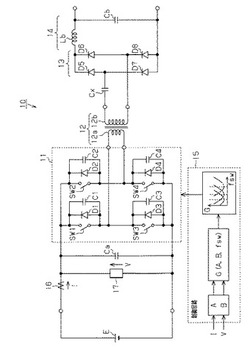
電力変換装置
【課題】回路素子の動作損失を低減し、変換効率の高効率化を図ることができる電力変換装置を提供する。
【解決手段】絶縁トランス12の二次側の整流回路13の後段に、平滑リアクトルLb、平滑コンデンサCbを有するフィルタ回路14が備えられるDC−DCコンバータ10において、絶縁トランス12の二次側コイル12bと整流回路13との間に共振コンデンサCxが直列に接続される。一次側のインバータ回路11は、スイッチング素子SW1,SW2のハーフブリッジ回路よりなり、フィルタ回路14の平滑リアクトルLbと共振コンデンサCxとの共振周波数に応じたスイッチング周波数にてスイッチング動作が行われる。
(もっと読む)
系統連系インバータ装置
【課題】系統連系インバータ装置でMPPT制御から連系点電圧抑制制御に切り換えた後、MPPT制御に戻すとき、最大電力点電圧への追尾時間のロスを低減する。
【解決手段】コントローラ4はインバータ装置3をMPPT制御で制御する第1の電圧指令値生成部401と、連系点電圧抑制制御で制御する第2の電圧指令値生成部402と、MPPT制御と連系点電圧抑制制御とを切り換える電圧指令値切換部403を備える。電圧指令値切換部403がMPPT制御から連系点電圧抑制制御に切り換えると、第2の電圧指令値生成部402は太陽電池2の出力電圧を上昇させる制御から当該出力電圧を低下させる制御に切り換え、太陽電池2の最大電力点を探索する。第2の電圧指令値生成部402は太陽電池2の出力電圧が最大電力点の電圧になると、連系点電圧抑制制御を終了し、第1の電圧指令値生成部401はMPPT制御を開始する。
(もっと読む)
91 - 100 / 990
[ Back to top ]