
株式会社ダイヘンにより出願された特許
811 - 820 / 990
レーザトーチ
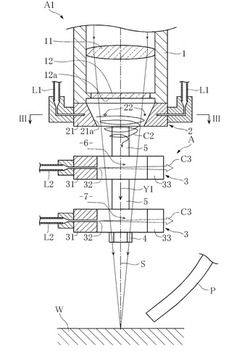
【課題】レーザ加工により発生したスパッタやヒュームなどの飛散物の保護ガラスへの付着を適切に防止することができるレーザトーチを提供すること。
【解決手段】筒状のレーザトーチ本体1と、レーザトーチ本体1の内部に配置された集光レンズ11と、レーザトーチ本体1における集光レンズ11より先端側に設けられた保護ガラス12とを備え、集光レンズ11によって集光されたレーザ光を保護ガラス12を通して被加工物Wに照射するレーザトーチA1であって、レーザトーチ本体1には、保護ガラス12の外側に近接した位置において、被加工物方向Y1への気流を発生させる第1の気流発生手段2と、第1の気流発生手段2よりも被加工物W側の位置において、レーザ光を横断する方向への気流を発生させる第2の気流発生手段3とが付設されている。
(もっと読む)
スタッド溶接装置

【課題】駆動主軸の軸方向動を阻害することなく、この駆動主軸300の軸周りの回転を適正に規制し、長期間安定した溶接作業が可能なスタッド溶接装置を提供する。
【解決手段】本体ハウジング200と、この本体ハウジング200内に所定の行程を軸方向移動可能に保持された駆動主軸300と、この駆動主軸300の先端側に連結固定され、スタッド保持チャック450が取り付けられるチャックアダプタ400と、このチャックアダプタ400に接続された給電ケーブル370と、を備えたスタッド溶接装置であって、上記駆動主軸300には、その側方に延出するガイド突起340が設けられ、このガイド突起340には、所定の回転軸心周りに自由回転する回転体362が支持されている一方、上記本体ハウジング200には、上記回転体362が接触転動するガイドスロット270が形成されている。
(もっと読む)
溶接電源のロック制御方法。
【課題】 溶接電源に複数のロックモードを有し、ロック設定用キースイッチの操作によって所望のロックモードを選択することができるようにすること。
【解決手段】 溶接電源は第1ロックモード及び第2ロックモードを有し、溶接電源に設けられたロック設定部によって第1ロックモードを選択すると、溶接電源のフロントパネル及び溶接電源外部からの複数の指令信号の中から溶接起動・停止指令信号、溶接ワイヤを送給させるインチング指令信号及びシールドガスを放流させるガスチェック指令信号の入力を許可しその他の指令信号の入力を禁止してロックし、ロック設定部によって第2ロックモードを選択すると指令信号の中から溶接起動・停止指令信号、インチング指令信号、ガスチェック指令信号、出力電流指令信号及び出力電圧指令信号の入力を許可し、その他の指令信号の入力を禁止してロックすることを特徴とする溶接電源のロック制御方法。
(もっと読む)
レーザ溶接システム
【課題】溶接品質を確保して、レーザ溶接システムのランニングコストを著しく向上させることができるレーザ溶接システムを提供する。
【解決手段】レーザトーチから照射されるレーザ光の入熱量を測定するときのレーザ発振器の出力の設定値を設定するレーザ出力設定部と、レーザ光の入熱量を測定するレーザ入熱量測定器と、溶接開始前にレーザトーチからレーザ入熱量測定器にレーザ光を照射して、このレーザ入熱量測定器の測定値とレーザ出力設定部の設定値との差に基づいて入熱量の低下比率を算出し、レーザトーチから照射されるレーザ光のエネルギが減衰して入熱量の低下比率が所定値以上のとき、以後の溶接を行わず、入熱量の低下比率が所定値以下のとき、レーザ発振器の設定値を補正して、レーザ入熱量測定器の測定値を補正前のレーザ発振器の設定値に修正して溶接を行うレーザ入熱量制御部とを備えたレーザ溶接システム。
(もっと読む)
燃料電池コージェネレーションシステムの温水温度制御方法
【課題】燃料電池8によって電気及び高温排気ガス9を発生し、この高温排気ガス9は熱交換器10に供給し、この熱交換器10に冷水12を供給して温水16に変化させて給湯する燃料電池コージェネレーションシステムの温水温度制御方法において、上記の高温排気ガス9の温度Tiが変化しても上記の温水16の温度を所定値に精密に制御する。
【解決手段】本発明は、高温排気ガス9の保有熱量Qcを算出し,この高温排気ガス保有熱量Qc及び温水温度設定値Tr及び冷水温度Twに基づいて冷水12の流量設定値frを算出し,冷水12の流量fがこの冷水流量設定値frと略等しくなるように調節して温水温度を所定値に制御する。
(もっと読む)
ロボット制御装置
【課題】作業者が教示点の位置・姿勢を修正するための手動操作を行う際に、安価かつ簡単な構成で、位置・姿勢情報を修正することができるとともに、作業者への負担を軽減することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボット制御装置3は、教示点の位置・姿勢を修正するための手動操作によるロボット4の動作速度を制御する動作速度制御部8と、手動操作に従って、ロボット4の動作を制御する動作制御部6とを備えている。動作速度制御部8は、ロボット本体のリンク上および作業ツール上に予め設定された特徴点と、特徴点の位置座標を表現するために設定された基準点との接近距離を算出するとともに、接近距離に基づいて、動作速度を決定する。動作制御部6は、決定された動作速度により、ロボット4を動作させる。
(もっと読む)
消耗電極パルスアーク溶接の出力制御方法
【課題】ピーク期間中のピーク電流の通電とベース期間中のベース電流の通電とを1パルス周期として溶接電流を通電して溶接する消耗電極パルスアーク溶接において、アーク長の変動を抑制する。
【解決手段】本発明は、第n回目のパルス周期の開始時点から平均溶接電流値Iavを刻々と算出し、ピーク電圧値Vpを検出し、このピーク電圧値Vpを入力として予め定めた外部特性L3によって平均溶接電流設定値を算出し、ピーク期間に続くベース期間中に平均溶接電流値Iavと平均溶接電流設定値とが等しくなった時点で第n回目のパルス周期を終了し、続けて第n+1回目のパルス周期を開始する消耗電極パルスアーク溶接の出力制御方法である。
(もっと読む)
アーク溶接ロボットの制御方法
【課題】教示された溶接長を一定に維持することができるアーク溶接ロボットの制御方法を提供する。
【解決手段】溶接開始点及び溶接終了点を入力として溶接終了点に到達させるのに必要な複数の計画補間点を算出し、溶接トーチをこの計画補間点へと移動を開始させる補間点計画ステップと、溶接状態を監視する計測器から入力される溶接速度変更指令に基づいて計画補間点及び溶接終了点を溶接線前後方向にシフトさせるための修正補間点及び修正溶接終了点を溶接中刻々と算出し、前記溶接トーチを修正補間点及び修正溶接終了点に移動させる補間点修正ステップと、溶接トーチが修正溶接終了点に到達するまでに溶接終了点に到達したかを判定し、到達した場合は移動を停止して溶接を終了し、到達しなかった場合には修正溶接終了点及び溶接終了点を入力として補間点計画ステップに戻る溶接終了判定ステップと、を有する。
(もっと読む)
変圧器用タンク
【課題】タンク内に生じるデッドスペースを必要最小限とし、タンクの小形化および変圧器の軽量化を図る。
【解決手段】変圧器用タンク3が、上端にフランジ部を有し、容量および外形寸法の大きい第1の単相変圧器本体1を収納する有底筒状の下部タンク外箱3Aと、両端が開口して上端及び下端にフランジ部13及び14を有し、容量および外形寸法の小さい第2の単相変圧器本体2を収納する筒状の上部タンク外箱3Bとに上下に2分割され、前記上部タンク外箱3Bの横断面寸法が前記下部タンク外箱3Aの横断面寸法よりも小さく設定されていて、前記下部タンク外箱3Aのフランジ部12と前記上部タンク外箱3Bの下端のフランジ部14とが連結されている。
(もっと読む)
レーザ照射アーク溶接ヘッド
【課題】治具と干渉することが減少され、狭隘な溶接箇所を溶接することができ、操作性を著しく向上させることができるレーザ照射アーク溶接ヘッドを提供する。
【解決手段】レーザ光を被溶接物の溶接箇所に照射するレーザトーチ12と、溶接箇所に消耗電極ガスシールドアーク溶接を行う溶接トーチ5と、レーザトーチ12内に設けられて光ファイバ11によって伝送されたレーザ光を平行光に変換する1枚又は複数枚のコリメートレンズ13と平行光に変換されたレーザ光を被溶接物へ集光する1枚又は複数枚の集光レンズ15とからなる集光レンズ光学系とを備え、集光レンズ光学系のうちレーザトーチ先端に設けられた1枚のレンズが固定され、その他のレンズのうち被溶接物上に照射されるレーザ光のスポット径によって予め選択された1枚又は複数枚のレンズを光軸に沿って移動させるレンズスライド機構とを備えたレーザ照射アーク溶接ヘッド。
(もっと読む)
811 - 820 / 990
[ Back to top ]