
株式会社ダイヘンにより出願された特許
881 - 890 / 990
スポット溶接ロボット制御装置
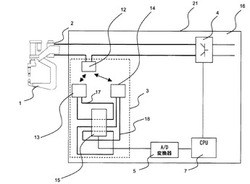
【課題】作業に応じた的確な加圧力の付与を可能にするロボット制御装置を提供する。
【解決手段】ロボット制御装置21は、サーボモータ2により溶接電極を駆動するスポット溶接ガン1を含むロボット溶接システムを制御する。この装置21は、サーボモータ2に流れる電流を電流検出器3が検出し、ロボット制御CPU7が、この検出値に応じて、サーボモータ2に流す電流を調整し、溶接電極を被溶接物へ押し付ける加圧力を制御する。電流検出器3は、ホール素子15と、このホール素子15を挿通させる回数を互いに異にした複数の配線17、18と、これら複数の配線17、18のいずれか1つを選択可能にされた切替手段12、13、14とを含む。
(もっと読む)
ヒューズストライカの突出力伝達機構及びそれを用いた路上設置形変圧器装置

【課題】突出力伝達機構に伝達力を増加させるための付勢機構を設けることなく、ストライカの突出力で突出力伝達機構と、三相開閉器の三相分を同時に開閉させる開閉駆動機構とを共に動作させるようにしたヒューズストライカの突出力伝達機構を提供することにある。【解決手段】電力ヒューズが三相分からなり、ヒューズ52a〜52cの溶断により外部に突出するストライカ52a1〜52c1の突出力を利用して三相開閉器51を開路させるように動作する第1及び第2の突出力伝達機構100Aa〜100Ac,100Bを備える。第1の突出力伝達機構は突出力により動作するようにヒューズに対応して構成される。第2の突出力伝達機構は第1の突出力伝達機構のいずれかの動作を受けて動作するように構成される。第2の突出力伝達機構が動作したときに、突出力を伝達させて三相開閉器の三相分を同時に開閉させる開閉駆動機構69と第2の突出力伝達機構との間に通常状態で隙間gが設けられている。 (もっと読む)
ロボット教示装置及び方法
【課題】 ロボットの教示の際のアーム同士の特異姿勢の発生を回避する。
【解決手段】 複数のアーム、関節及び駆動源を備えるマニピュレータ装置10と走行装置20とを備えるロボット1の教示装置30において、教示点入力手段37と、入力教示点に基づく複数の移動目標位置T1ごとにマニピュレータ装置の先端部14を位置決めする際に、第二の関節13bが屈曲状態を維持した状態での走行装置の走行方向及び走行距離を求める走行距離算出手段と、当該求められた走行方向及び走行距離を反映させてロボットの制御データを生成するデータ生成手段とを備えている。
(もっと読む)
ロボットシステム
【課題】ロボットシステムによる作業時間を短縮し、作業効率を向上させる。
【解決手段】複数のロボット2,3と、各ロボット2,3の駆動制御を行う制御装置4と、を備えるロボットシステム1において、制御装置4は、作業情報記憶手段43と、補間演算周期記憶手段43と、解析手段45と、補間点位置演算手段46と、補間点位置情報記憶手段43,48と、駆動制御手段49と、判断手段47と、を備え、駆動制御手段49は、判断手段47により、一のロボット2の移動開始位置から数えてn番目(nは自然数)における補間点位置と他のいずれかのロボット3の移動開始位置から数えてn番目(nは自然数)における補間点位置との間隔が所定間隔未満であると判断された場合に、n番目(nは自然数)における補間点位置情報43dの各ロボット2,3への送信を停止させる。
(もっと読む)
非消耗電極アーク溶接の電流制御方法
【課題】 溶加ワイヤ4を使用して手動で行う非消耗電極アーク溶接において、溶接の進行に伴う母材温度の上昇に対応して溶接品質を均一にするために、溶接速度及び溶加ワイヤ4の送給速度を手動で調整しながら溶接電流Iwを自動的に適正値に修正することができるようにすること。
【解決手段】 本発明は、溶加ワイヤ4を手動で溶融池2に送給しながら行う非消耗電極アーク溶接の電流制御方法において、前記溶加ワイヤ4と母材2との間のワイヤ電圧Vwを検出し、このワイヤ電圧Vwによって前記溶加ワイヤ4の送給速度Fwを算出し、この溶加ワイヤ4の送給速度Fwに応じて溶接電流値Iwを自動的に変化させる、ことを特徴とする非消耗電極アーク溶接の電流制御方法である。
(もっと読む)
溶接用ロボット
【課題】一線式パワーケーブルに外力が掛かり、パワー導体部がねじれても、ワイヤの突出し長さが変動することがない溶接用ロボットを提供する。
【解決手段】上アームと、手首部と、手首部に取り付けたトーチと、上アームの後端部に取り付けたワイヤ送給機と、コイルライナと、コイルライナが軸芯部を挿通するパワー導体部とを備え、パワー導体部の後端部をワイヤ送給機のワイヤ送出部に取り付けパワー導体部が上アーム及び胴体に形成したケーブル挿通孔を通過して胴体の長手方向に延びてパワー導体部の先端部をトーチに取り付け、コイルライナの後端部をパワー導体部の後端部に挿入して固定しその先端部をトーチの後端部のライナ挿通孔に挿入する溶接用ロボットにおいて、トーチの後端部のライナ挿通孔にコイルライナの先端部を固定するライナ固定手段を備えた溶接用ロボット。
(もっと読む)
インバータ電源装置
【課題】フォワード・コンバータ方式のインバータ電源装置において、主素子のターンオン及びターンオフにおいて損失が発生し、電源装置の小型化の妨げになっていた。
【解決手段】直流電源回路と1次巻線、2次巻線及び1次帰還巻線を設けた変換器と1次巻線の端子に接続した主素子と主素子のエミッタと1次帰還巻線の端子間とに設けた帰還ダイオードと負荷の電圧のフィードバック信号に応じて生成しかつ所定のデッドタイムを有する制御信号を出力するパルス幅変調制御回路と直流電源回路の−側と主素子のエミッタ間とに設けた電力開閉用素子と直流電源回路の+側と電力開閉用素子のコレクタ間とに設けた補助コンデンサと電力開閉用素子に並列に設けた充電用抵抗器と制御信号に応じて電力開閉用素子を制御する電力開閉用駆動回路と制御信号がオンすると主素子を導通しオフすると所定時間後に遮断させる主素子駆動回路とを備えたインバータ電源装置である。
(もっと読む)
電源システムの運転方法
【課題】直流電源に容量の異なる複数台のインバータ装置を並列接続し、直流電源からの電源出力電力値Pに基づいて電力変換効率が高くなるように起動台数を決定する。
【解決手段】本発明は,複数台のインバータ装置が定格入力電力値Pmのm台の大容量インバータ装置及び定格入力電力値Pnのn台の小容量インバータ装置からなり、電源出力電力値Pに基づいて、P≦Pn・nのときはn台の小容量インバータ装置のみから起動台数を決定し、Pn・n<P≦Pm・mのときはm台の大容量インバータ装置のみから起動台数を決定し、P>Pm・mのときは大容量インバータ装置をm台起動しかつn台の小容量インバータ装置から起動台数を決定する電源システムの運転方法である。
(もっと読む)
産業用ロボットの制御方法
【課題】ワークが特徴部位を持たない平面または曲面であってもレーザセンサによって移動目標位置及び目標姿勢を算出することができ、教示位置及び姿勢を補正することができる産業用ロボットを提供する。
【解決手段】現在位置と教示位置との間を予め複数の移動目標位置に分割して、ロボットのツール先端点を前記移動目標位置に順次移動させながら前記教示位置に到達させる産業用ロボットの制御方法において、前記移動目標位置を、前記ツール制御点の進行方向を決めるベクトルである基準方向ベクトルと、前記進行方向の前方に配置されたレーザセンサによって前記基準方向ベクトルの方向にあって前記ツール制御点の現在位置から先行した位置において検出されたワーク表面からの高さ方向距離と、に基づいて算出する。ツールの目標姿勢は、ワーク表面からの高さ方向距離を求める基準軸に基づく予め定められた姿勢である。
(もっと読む)
消耗電極アーク溶接終了制御方法
【課題】消耗電極アーク溶接の溶接終了時におけるスパッタ発生を抑制する。
【解決手段】本発明は、溶接電源に溶接終了指令が入力されると、送給モータに停止指令を出力し、溶接ワイヤが停止したときのワイヤ燃上り高さが略所望値になるように溶接電源の出力をアンチスチック制御する消耗電極アーク溶接終了制御方法において、同図(A)に示す溶接終了指令Stが入力された後の同図(G)に示す最初の短絡発生を検出して同図(C)に示す送給モータに停止指令を出力し、続いてこの短絡期間中に溶滴のくびれ現象を検出して溶接電流Iwを急減させて低い値に維持してアークを再発生させ、アーク長が略一定の低い状態でアークが再発生すると(tb)、前記アンチスチック制御を行いワイヤ燃上り高さを所望値にする消耗電極アーク溶接終了制御方法である。
(もっと読む)
881 - 890 / 990
[ Back to top ]