
川崎重工業株式会社により出願された特許
101 - 110 / 1,710
故障判定装置、故障判定方法および故障処理システム
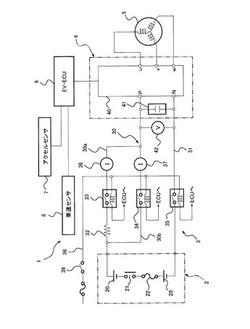
【課題】電動車両のような乗り物の電気回路に複数、設けたリレー等の短絡故障や開放故障をそれぞれ個別に判定可能とする。
【解決手段】例えば高圧電源ライン30の並列な第1および第2の電気経路30a,30bと高圧グラウンドライン31(第3の電気経路)とが閉ループを構成し、これら3つの電気経路にそれぞれリレー33〜35が配設されている。3つの電気経路のうちの2つの通電状態をそれぞれ個別に検出可能な通電検出手段を備える。3つの電気経路の通電状態が順次、変化するように各リレーを動作させ、通電検出手段によって検出される各電気経路の通電状態の変化に基づいて、各リレーの故障をそれぞれ個別に判定する。
(もっと読む)
タービン用ロータおよびその製造方法ならびにNi基超合金材と鋼材の接合方法および構造

【課題】Ni基超合金部分と鋼部分とを有するタービン用ロータおよびその製造方法であって、Ni基超合金部分と鋼部分との接合部分がタービン用ロータとして十分な機械的特性を備え得るものを提供する。また、上記タービン用ロータのために好適な、Ni基超合金材と鋼材の接合方法および構造を提供する。
【解決手段】タービン用ロータの製造方法が、析出硬化型Ni基超合金より成る第1のロータディスクと固溶強化型Ni基超合金より成る中間材とを電子ビーム溶接により接合するステップと、この接合体について前記析出硬化型Ni基超合金を時効硬化させるために適した第1の温度で時効硬化処理を行うステップと、中間材と鋼より成る第2のロータディスクとを電子ビーム溶接により接合するステップと、この接合体について鋼を焼なますために適した第2の温度で焼なまし処理を行うステップとを含む。
(もっと読む)
騎乗型車両の発進制御装置
【課題】 騎乗型車両を円滑に発進可能にする。
【解決手段】 車両1が発進前の状態であるとの条件を含む発進制御開始条件が成立するか否かを判定する開始条件判定部31と、発進制御時における走行動力発生源10の回転数の目標値を予め記憶する記憶部32と、開始条件判定部31により発進制御開始条件が成立したと判定されると、走行動力発生源10の回転数を目標値となるように制御する発進制御を実行する発進制御部34と、走行動力発生源10から駆動輪2bへの動力伝達経路15に介設されたクラッチ17の作動状態を判定するクラッチ状態判定部33と、を備え、発進制御部34は、クラッチ状態判定部33により判定されるクラッチ17の作動状態に応じて目標値を決定する。
(もっと読む)
スラグ溶融装置及びこれを備える流動床式ガス化溶融設備
【課題】 溶融炉の出滓口から排出される溶融スラグが水封槽で冷却されたときに発生する水蒸気によって、この溶融スラグが冷やされることを抑制して、出滓口が冷却されたスラグによって閉塞されることを防止すること。
【解決手段】 流動床式ガス化炉17で生成された生成物を溶融燃焼して溶融スラグ2を生成し、この生成した溶融スラグ2を出滓口31から排出する溶融炉18と、この溶融炉18に設けられ出滓口31に接続するスラグ排出シュート19と、スラグ排出シュート19の出口側を水封するように設けられ溶融スラグ2を冷却する水封槽21とを備えるスラグ溶融装置23において、溶融スラグ2が水封槽21で冷却されたときに発生する水蒸気の体積に相当する当該水蒸気を含むガス34を、スラグ排出シュート19から抜き出すためのガス抜き装置22を備える。
(もっと読む)
仮設橋の架設方法
【課題】災害時や有事において、河川や濠に迅速に橋を渡して車両等の通行を可能にするための仮設橋の架設方法を提供する。
【解決手段】作業側岸1側の支点チューブキャップ3にガスで膨張させる空気チューブ4、テンションスリング5、圧縮ストラット7を通し、先端部を対岸側の支点チューブキャップ3に接続して送り出しジャッキ6で圧縮ストラット7を送り出し、支点チューブキャップ3を対岸13に到達させて接地させ、空気ポンプ8により空気チューブ4を膨張させた後、支持体9の上面に床版パネル10を作業側岸1から順に並べて敷設し、最後に両端に踏掛け板11を設置して仮設橋を完成させる。
(もっと読む)
複合材構造体の埋込光ファイバ修理方法と修理構造及び接続構造
【課題】 複合材に埋め込まれた埋込光ファイバが損傷した場合、その損傷した埋込光ファイバを代替光ファイバに置換えて、もとの埋め込まれた光ファイバ全体を修復できる複合材構造体の埋込光ファイバ修理方法を提供すること。
【解決手段】 複合材の内部に埋め込んだ埋込光ファイバ10を有する複合材構造体1の埋込光ファイバ修理方法として、前記埋込光ファイバ10の損傷部分を含む複合材の一部分を一体的に除去して開口部3を形成し、前記開口部3に露出する埋込光ファイバ10の端面を複合材端面と一体的に研磨し、前記研磨した埋込光ファイバの芯と代替光ファイバの芯とが連続するように位置調整して両端面を突き合わせ、該埋込光ファイバの端面と代替光ファイバの端面とを接続する。
(もっと読む)
ロボット及びその教示方法
【課題】エンドエフェクタやターゲットの変形を引き起こすことなく、また、パーティクルの発生を防止できる自動教示方法を提供すること。
【解決手段】ロボット制御手段40は、アーム駆動手段を制御してロボットアーム28の先端部を移動させて、手首軸に取り付けられた接触部材50を教示ターゲット51に接触させ、接触部材50と教示ターゲット51との接触により手首軸が角変位を開始した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出して教示点の位置を決定する。
(もっと読む)
リリーフ弁
【課題】流入口の液圧が急激に上昇するような状態となった場合において、流入口の圧液を、従来よりも低い液圧から逃がすことができて、その低い液圧の状態から流入口の液圧の上昇を開始させることによって、流入口に大きなサージ圧力が発生することを防止することができるようにすること。
【解決手段】 弾性部材によって前方に押圧されて流入口2aと流出口1aとを遮断するプランジャ3が、流入口2aの圧力上昇に伴い弾性部材の弾性力に抗して後退移動して、流入口2aと流出口1aとを連通させると共に、弾性部材の後端を前方に押圧するピストン4が、流入口1aの圧力上昇に伴い前進移動することにより弾性部材を圧縮してリリ−フ圧力を調整するリリーフ弁R1において、弾性部材は、互いに直列に配置された第1弾性部材5aと第2弾性部材5bとを備え、第2弾性部材5bは、第1弾性部材5aよりも弾性定数が小さい構成。
(もっと読む)
ふく進測定装置、ふく進測定システム及びふく進測定方法
【課題】簡素な構成でふく進量測定の作業効率や測定精度等を向上させる。
【解決手段】ふく進測定装置4は、鉄道のレール6R,6L上を走行する車両5に搭載され、車両走行中に、レール6R,6Lから側方に離れた位置で地面と一体的に設けられた基準マーカ2R,2Lと、レール6R,6Lと一体的に設けられたレールマーカ3R,3Lとを撮影するラインセンサ11R,11L,12R,12Lと、ラインセンサ11R,11L,12R,12Lで撮影された画像上において基準マーカ2R,2L及びレールマーカ3R,3Lを検出する画像処理部と、画像処理部で検出された情報から基準マーカ及びレールマーカのレール長手方向の位置を算出する位置算出部と、位置算出部で算出された各位置からレール6R,6Lのふく進量を算出するふく進量算出部と、を備えている。
(もっと読む)
燃料噴射装置
【課題】パイロット燃焼領域とメイン燃焼領域とが大きく離れることなく、低出力時におけるパイロット噴射弁の燃焼効率や着火性・保炎性を向上させることのできる燃料噴射装置を提供する。
【解決手段】燃焼室4内に拡散燃焼領域A1を形成するように燃料を噴霧するパイロット噴射弁6と、パイロット噴射弁6を囲むようにこのパイロット噴射弁6と同軸状に設けられ、燃焼室4内に予混合燃焼領域A2を形成するように燃料と空気の予混合気を供給するメイン噴射弁8とを備え、パイロット噴射弁6は、中心軸上で軸方向に直進する空気ジェットを噴出させる中心ノズル20と、その径方向外側に位置して流入する空気にパイロット噴射弁6の軸心回りの旋回を与える内側スワーラ30と、中心ノズル20と内側スワーラ30の間から中心ノズル20内の空気流に燃料を噴射するパイロット燃料噴射部22aとを有する。
(もっと読む)
101 - 110 / 1,710
[ Back to top ]