
株式会社小松製作所により出願された特許
1,671 - 1,680 / 1,686
セグメントの位置合せ方法
エンジンのバルブ機構の制御装置及びその制御方法
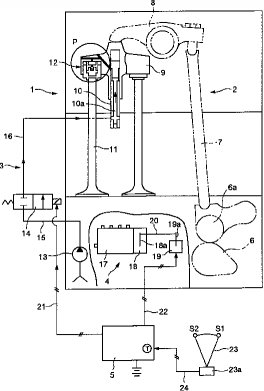
【課題】 高出力化によるディーゼルエンジンの始動時及び高速時の諸特性の問題を改善する。高出力エンジンで問題となる始動不良、始動直後に排出される、通常強い刺激臭を伴う白煙の問題を解消し、かつ、高速時には高出力化による筒内圧力の抑制、燃焼温度低下によるNOX 等排出ガス特性の改善、損失馬力低減による燃料消費率を改善する。
【解決手段】 エンジンのバルブ機構の吸気弁とクロスヘッドとの間に吸気弁作動角可変装置を設け、始動時にはバルブ機構への圧油の供給を停止して、吸気弁のリフト及び作動角を小さくて有効圧縮比を上げ、高速時にはバルブ機構へ圧油を供給して、吸気弁のリフト及び遅閉作動角を大きくして、有効圧縮比を下げ、始動時と高速時との2段階の制御で、吸気弁の作動角及び有効圧縮比を可変にする。
(もっと読む)
油圧ショベルのセンタフレーム旋回支持装置

【課題】 従来のセンタフレ−ムの上面板に円環状の取付部材に施される脚長の長い溶接および、上面板(厚板)の曲げ加工を廃止し、製作コストが安価で、しかも耐久性のあるセンタフレ−ム旋回支持装置を提供する。
【解決手段】 油圧ショベル20のセンタフレーム2の旋回支持装置であって、センタフレーム2Aの上面板41と4つの脚部上面板42を固着し、このセンタフレーム2の中央上面板41と旋回フレーム1との間に旋回装置のインナレース4Aを着脱自在に取着したものである。
(もっと読む)
溶接ロボット
【目的】 操作性に優れ、教示精度がよく、かつ溶接作業に先立って高精度にワークの位置検出を行うことができ、これにより、教示装置で教示された点で結ぶ溶接作業線に沿って正確に溶接を行うことができるようにする。
【構成】 所定の自由度を有するアーム部材の先端に指示具を装着し、この指示具でワーク上の溶接線を指示することによりロボットアームの動作を教示するようにした教示装置と、溶接線を検出する検出装着とを溶接ロボットのロボットアームの先端部に装着し、前記検出装置からの検出からの検出信号を受けて、教示装置からの信号による教示動作を補正する制御手段を設けた構成となっている。
(もっと読む)
土圧式シールド掘進機の排土用スクリュウコンベヤ装置
【目的】 スクリュウ羽根の耐摩耗性を向上させた排土用スクリュウコンベヤ装置を提供する。
【構成】 シールド本体1の前部に設けられたカッタヘッド2により掘削した土砂を、シールド本体1前部のチャンバ1a内へ取込んだ後、スクリュウコンベヤ4によりチャンバ1a内より搬出するようにした土圧式シールド掘進機において、上記スクリュウコンベヤ4のスクリュウ羽根4b外周面に、円周方向に所定のピッチpで多数の超硬チップ8を取付けたもので、超硬チップ8によりスクリュウ羽根4bの耐摩耗性が向上するため、長期間安定した土砂の搬送が可能である。
(もっと読む)
拡大シールド装置
【目的】鉄筋コンクリート製の既設管の解体及び拡大敷設替えに際し、該既設管の躯体内部の鉄筋を確実に破砕する。
【構成】カッタヘッド10の掘削面10gを外周から中央部に向かって窪むように形成し、該カッタヘッド10の中心に突出させる形で、その外周に破砕突起25を設けた内筒23を、破砕コアとして設ける。カッタヘッド10と内筒23との間に解体物移送空隙26を筒状に設け、該解体物移送空隙26に対向した案内部10dに鋸刃101を設けておく。老朽管3の真中に仮設した鉄管6の内部に流路FLを確保した状態で、該鉄管6を包囲するようにシールド装置7を配置させ、シールド掘進動作によって老朽管3の躯体31を圧壊し、躯体片や鉄筋等を掘削面10gに沿って解体物移送空隙26に移送し、ここで確実に破砕処理する。
(もっと読む)
拡大シールド装置及び工法
先導管推進装置の掘進方法
【目的】 最適掘進速度を自動設定及びその自動補正を行うに好適な先導管推進装置の掘進方法を提供する。
【構成】 先導管を土中で掘進させる先導管推進装置の掘進方法において、(1)予め、各種施工条件Fと、これらに対応する先導管の各最適掘進速度指標Vとの関係Rを定めておき、(2) 掘進の際し、予め、実際施工条件Faを前記関係Rに当てはめて該実際施工条件Faに対応する先導管の実際最適掘進速度指標Vaを求め、(3) 掘進時は、該実際最適掘進速度指標Vaを目標として前記先導管を土中で掘進させることとした。また予め設定された最適掘進速度指標Vaを目標として先導管を土中で掘進させる先導管推進装置の掘進方法において、(1) 掘削土圧変化ΔPを求め、(2) この掘削土圧変化ΔPによって前記最適掘進速度指標Vaを補正し、(3) この補正値Vaoを目標として前記先導管を土中で掘進させることとした。ここで、掘削土圧変化ΔPは、掘削トルク変化ΔTでもよい。
(もっと読む)
産業車両のバケットレベラ装置
産業車両のバケット角制御装置
1,671 - 1,680 / 1,686
[ Back to top ]