
株式会社小松製作所により出願された特許
1,681 - 1,686 / 1,686
端末の自動立上げシステム
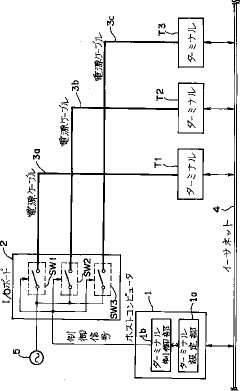
【目的】複数のターミナルの電源投入/切断を無人化する。
【構成】ホストコンピュータ1は、ターミナル設定部1aおよびターミナル制御部1bを有し、I/Oボード2に接続している。ターミナル設定部1aは、複数のターミナルの中から電源投入および電源切断を行うターミナルの指定を行う。ターミナル制御部1bは、ターミナル設定部1aに設定されている情報を基に、I/Oボード2に制御信号を出力し、I/Oボード2を制御する。I/Oボード2は、スイッチSW1〜SW3を有し、スイッチSW1〜SW3を「オン」(電源投入)または「オフ」(電源切断)にする。
(もっと読む)
拡大シールド装置

【目的】地盤条件に限定されることなく円滑な掘進が可能で、且つ施工の自由度が高い、開放型の拡大シールド装置を提供する。
【構成】その前面に、除去すべき既設の覆工3aの径L3より大なる径L4をなす開放部5sを形成した外殻5の内周に沿って、覆工3aの周囲の地盤2を掘削する地盤掘削手段12を回転駆動自在な形で輪状に設け、地盤掘削手段12に、インペラープレート17Pに列状に装着された形の複数の刃17A(17B)を支持する刃支持面16aを、前側から後側に向けて縮径する形で設ける。地盤2の掘削ズリは開放部5sから、刃支持面16aと覆工3aの外周が形成するズリ出し空間33を介して外殻5内に搬送集積される。
(もっと読む)
曲げ機械の制御装置
鋼板移送装置
岩盤掘削機
【目的】 硬質岩盤の自由断面掘削が可能な岩盤掘削機を提供する。
【構成】 自走自在な走行部2の前部に、パラレルリンク機構4を介してカッタヘッド5を任意な方向へ揺動自在に設けると共に、上記走行部2に、掘削時走行部2を固定するグリッパ部12を設けたもので、カッタヘッド本体5aを回転させながらパラレルリンク機構4によりカッタヘッド5を揺動させることにより、硬質岩盤の自由断面掘削が容易に行える。
(もっと読む)
作業ロボツトのツール先端位置ずれ補正装置
【目的】作業ロボットのツール先端位置のずれを高速で補正することにより作業効率の向上を図る。
【構成】イメージセンサ4の撮像結果からシーケンサ12でツール先端2aの目標経路からのずれが目標経路に対して垂直な1次元的なものとして求められる。そして、ツール2を揺動させる揺動量が上記ずれに比例した量として求められる。しかして、この揺動量に応じてモータ14が駆動され、ツール先端2aが同様に1次元的に移動して目標経路上に位置決めされる。
(もっと読む)
1,681 - 1,686 / 1,686
[ Back to top ]