
クラリオン株式会社により出願された特許
1 - 10 / 1,722
ワイパー装置及びカメラユニット
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
画像表示装置およびナビゲーション装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
駐車支援装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
車載カメラシステム及びその較正方法、及びその較正プログラム
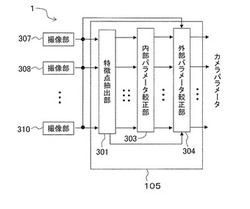
【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
ナビゲーション装置

【課題】充電に関するより分かり易い情報を提供することができる。
【解決手段】 ナビゲーション装置は、車両の充電を行う充電スポットに関する情報を記憶する記憶部と、出発地および目的地の入力を受け付ける入力受付部と、前記入力情報を用いて経路を探索する経路探索部と、目的地が車両の充電残量から特定される到達可能範囲にない場合に充電スポットを抽出する充電スポット抽出部と、目的地に到達するために必要な前記充電スポットでの充電量を算出する充電量算出部と、探索した前記経路とともに、抽出した前記充電スポットおよび該充電スポットでの充電量を表示する表示部と、を備える。
(もっと読む)
ディスク装置
【課題】長期に渡ってローディングローラーへの埃や砂塵の付着を防止することができるディスク装置を提供する。
【解決手段】ローディングローラー21に接触して該ローラー21の付着物を除去するクリーニング部材51と、除去された付着物が溜まる溜まり部となる底板部53とを備え、底板部53とローディングローラー21とを離間させた。
(もっと読む)
ナビゲーション装置
【課題】車線情報を最新の状態に保つための作業量及び車線情報量を低減するとともに、走行車線を正確に求めることのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、移動体の位置を推定する位置推定手段111と、推定された移動体の位置に対応する道路リンク候補点を特定する道路リンクマップマッチング手段121と、分岐周辺の車線情報記憶手段105から道路リンク候補点の前後に存在する各対象分岐の周辺の車線情報を取得する車線情報取得手段124と、取得した車線情報を用いて各対象分岐の周辺の道路リンクの位置誤差を算出する道路リンク位置誤差算出手段125と、取得した車線情報を用いて各対象分岐の周辺の車線間距離を算出する車線間距離算出手段126と、算出した位置誤差と車線間距離を用いて各対象分岐間の車線リンクを作成する分岐間車線リンク作成手段127とを備える。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
入力装置
【課題】ユーザの手の向きを特定する入力装置の提供。
【解決手段】入力装置1は、タッチパッド10と親指検出部21と人差し指検出部22と手方向特定部23と操作認識部24とを備える。タッチパッド10は、指の接触を検出する検出面を有する。親指検出部21は、タッチパッド10の検出面に1番目に接触した指の接触位置を親指の接触位置として検出する。人差し指検出部22は、タッチパッド10の検出面に2番目に接触した指の接触位置を人差し指の接触位置として検出する。手方向特定部23は、親指検出部21により検出された親指の位置と、人差し指検出部22により検出された人差し指の接触位置の軌跡に基づいて、タッチパッド10に対して入力を行う手の向きを特定する。操作認識部24は、手方向特定部23により特定された手の向きに基づいて、人差し指の接触位置の軌跡に対応した車載装置への入力操作を認識する。
(もっと読む)
車両用外界認識装置およびそれを用いた車両システム
【課題】自車挙動に応じて撮像タイミングを調整することにより、一定の処理周期の中で自車速に応じて効果的、効率的に物体の動きを観測する車両用外界認識装置を提供する。
【解決手段】車両用外界認識装置1000は、カメラ1010等の撮像装置から画像を取り込む画像取得部1011と、カメラから画像を取り込むタイミングを調整する撮像タイミング手段1031とを有し、撮像タイミング手段で設定された一定周期での画像取り込みと、その周期の間に不定期での画像取り込みを行う。自車挙動取得手段1021で自車速を取得し、取得された自車速に応じて不定期での画像取り込みのタイミングを調整し、取り込まれた画像を用いて前景と背景を分離し、前景から衝突の可能性がある物体を検出する。
(もっと読む)
1 - 10 / 1,722
[ Back to top ]