
セイコーエプソン株式会社により出願された特許
1,971 - 1,980 / 51,324
処理装置及び処理方法
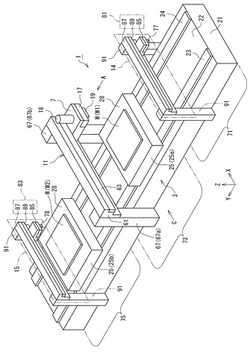
【課題】従来の処理装置では、処理効率を向上させることが困難である。
【解決手段】ワークWを支持する2つのワークテーブル25と、ワークテーブル25のそれぞれを、2つのワークテーブル25間で共通する経路である共通経路を含む移動経路で案内するガイドレール23及びガイドレール24と、前記共通経路において、ワークテーブル25のそれぞれに支持されたワークWに対向した状態で、対向するワークWに対して描画処理を施す吐出ヘッド19と、前記共通経路においてワークテーブル25のそれぞれが吐出ヘッド19に対向し得る領域である処理領域73の外側に設けられ、ワークテーブル25に支持されたワークWの高さ位置を、処理領域73の外側で検出する第1検出装置14及び第2検出装置15と、吐出ヘッド19とワークWとの間の隙間量を調整する昇降モーター18と、を有する、ことを特徴とする処理装置。
(もっと読む)
回転動力源制御方法および回転動力源制御装置、並びにロボット

【課題】アームが運動中に、当該アームと何らかの障害物とが衝突したことを検知した場合に、モーターと、アームと、接続部とを破損させることなく、アームの動作を停止させることができる回転動力源の制御方法および制御装置を提供する。
【解決手段】動力部の回転動力が伝達され運動する第1回転軸と、動力部の回転動力を取り出す回転軸となる第2回転軸と、第1回転軸と、第2回転軸とを接続し、第2回転軸の運動を第1回転軸に伝達する接続部と、第1回転軸の第1角速度を検出する第1角速度検出部と、第2回転軸の第2角速度を検出する第2角速度検出部と、第1角速度と、第2角速度とに基づいて、第1回転軸と、第2回転軸との間に生じる捻れ角速度の演算をする捻れ角速度演算部と、捻れ角速度を所定の範囲内に制御する制御部とを備える。
(もっと読む)
水平多関節ロボット
【課題】アーム内部のベルトにかかっている張力を容易にチェックできる水平多関節ロボットを提供する。
【解決手段】第2腕部9を移動するロボット1であって、第2腕部9の構造を維持するアーム基台9eと、アーム基台9eに設置され第4プーリー30と第4プーリー30を駆動する第4モーター28とを有する第2の駆動部50と、
第2の駆動部50に駆動される第3プーリー27を有する被駆動部51と、
第4プーリー30と第3プーリー27とに設置され動力を伝達する上下用ベルト31と、を有し、アーム基台9eは凹部9cを有し、上下用ベルト31は凹部9cから露出する場所に位置する。
(もっと読む)
水平多関節ロボット
【課題】アームの美観を好適にするときにも生産性良く水平多関節ロボットを製造できるアームの構造を提供する。
【解決手段】第2アーム5を移動するロボット1であって、第2アーム5は、機構部28が搭載されるアーム基台10と、アーム基台10に設置され機構部28と接続する接続部材32が挿通される孔部30a、孔部30bを有する接続板30と、接続板30を露出させる第1開口部34aを有しアーム基台10の側面10dを覆うカバー部34と、を備える。
(もっと読む)
水平多関節ロボット
【課題】放熱に優れた昇圧器の取り付け構造を有する水平多関節ロボットを提供する。
【解決手段】基台20に回動可能に連結される第1アーム30と、第1アーム30に回動可能に連結される第2アーム40と、を有する水平多関節ロボット10であって、第2アーム40に設けられたモーターM4と、モーターM4を制動させる電磁ブレーキ43と、第2アーム40に設けられ、電磁ブレーキ43に供給される電圧を昇圧する昇圧器70と、第2アーム40に固定された支持部材75と、を備え、昇圧器70が支持部材75に固定されている。
(もっと読む)
水平多関節ロボット
【課題】アームの回動範囲を規制し、ロボット自身およびツールの破損を防止する。
【解決手段】第1アーム30に形成され、第2アーム40の回動範囲を規制する第1突起部32と、第2アーム40に形成され、第1突起部32と当接可能な第2突起部42と、第1アーム30に形成され、平面視で第2突起部42の移動軌道上であり、第1突起部32から離れた位置に形成された第1ネジ穴35aおよび第2ネジ穴35bと、を備え、第1突起部32は第1アーム30と一体に形成され、第2突起部42は第2アーム40と一体に形成されている。
(もっと読む)
水平多関節ロボット、および水平多関節ロボットのキャリブレーション方法
【課題】簡略な方法で、かつ正確にキャリブレーションを実行することができる水平多関節ロボット、および水平多関節ロボットのキャリブレーション方法を提供する。
【解決手段】水平多関節ロボットは、基台と、前記基台に回動可能に連結される第1アームと、前記第1アームに回動可能に連結される第2アームと、前記第1アームを前記基台に対して水平方向に回動する第1駆動部と、前記第2アームを前記基台に対して水平方向に回動する第2駆動部と、を備え、前記第1アームの前記基台との連結部には、前記第1アームと一体成型され前記第1アームの回動方向に第1の幅を有した第1のマークが設けられ、前記基台の前記第1アームとの連結部には、前記基台と一体成型され前記第1の幅と同じ幅の第2のマークが設けられ、前記第1アームが前記基台に対して所定の位置に回動すると、前記第1のマークと前記第2のマークとが対向するように配置されている。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、コストを増加させずに、ケーブルの耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、フレームあるいはアームカバーと一体構造を有するケーブル保持部を提供し、ケーブルが固定される端部はアームの回動中心軸と平行とする。
(もっと読む)
画像記録装置、画像記録方法
【課題】ライン画像を副走査方向に複数並べて形成する画像記録技術において、ライン画像の副走査方向への幅を高精度に制御して、ライン画像間での隙間の発生を抑制する。
【解決手段】主走査方向に記録ヘッドを移動させつつ記録ヘッドから液体を噴射させることで、記録媒体の支持部材で支持される所定の印刷領域に対して、主走査方向に延びる1ライン分のライン画像を副走査方向に複数並べて形成する画像記録処理を実行する制御部と、記録媒体にエネルギーを与えて表面改質処理を行うことで、当該表面改質処理の以後に画像記録処理が実行される印刷領域の表面を改質する表面改質部と、記録ヘッドを主走査方向に移動させつつ記録ヘッドから液体を噴射させて記録媒体にマークを形成するとともに、マークの副走査方向への幅を検出した結果に基づいて表面改質処理でのエネルギーを調整する調整処理を実行する調整部とを備える。
(もっと読む)
画像記録装置、画像記録方法
【課題】主走査方向に移動する記録ヘッドから記録媒体へ液体を噴射してライン画像を形成する主走査を複数回行って、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録技術において、ライン画像間における隙間の発生を抑制する。
【解決手段】記録媒体の表面を改質する表面改質処理を実行する表面改質機と、記録媒体に形成されたマークの副走査方向への変位を検出する検出部と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する表面改質制御部とを備え、表面改質制御部が表面改質処理を実行すると判断した場合は、表面改質機は、後続ライン画像の形成に先立って表面改質処理を実行し、画像記録制御部は、表面改質処理が実行された記録媒体に対して後続ライン画像を形成する。
(もっと読む)
1,971 - 1,980 / 51,324
[ Back to top ]