
セイコーエプソン株式会社により出願された特許
2,121 - 2,130 / 51,324
混合器、送信機及び通信システム
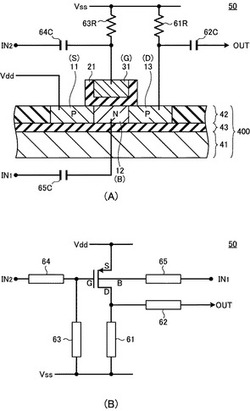
【課題】低電圧、低電流、或いは低電力といった条件下でも使用することが可能な混合器、送信機及び通信システムを提供する。
【解決手段】混合器は、交流的に接地された第1導電型の第1の半導体領域と、第1の信号入力端子に接続された第2導電型の第2の半導体領域であって、第1の半導体領域に接して位置する第2の半導体領域と、第1の信号出力端子に接続された第1導電型の第3の半導体領域であって、第1の半導体領域から離間し且つ第2の半導体領域に接して位置する第3の半導体領域と、第2の半導体領域上に位置する第1の絶縁膜と、第2の信号入力端子に接続された第1の導電体膜であって、第1の絶縁膜上に位置する第1の導電体膜と、を含む。
(もっと読む)
表示システム

【課題】利便性がよい表示システムを提供する。
【解決手段】表示システム1は、第1プロジェクター10及び第2プロジェクター11を含む投写部2と、互いに積層された液晶層と偏光板とを有する光学素子12、13を、液晶層の配置側が投写部2の光射出面に対向する第1状態と偏光板の配置側が投写部2の光射出面に対向する第2状態とで変更可能に、保持する保持部3と、第1状態で第1プロジェクター10から射出された光と第2プロジェクター11から射出された光とが時間的に交互に光学素子12、13を通るように液晶層を制御し、第2状態で第1プロジェクター10から射出されて光学素子12を通った光と第2プロジェクター11から射出されて光学素子13を通った光とが互いに直交する偏光になるように液晶層を制御する制御部5と、を備える。
(もっと読む)
振動片、振動子、発振器、電子機器
【課題】二次モードを抑制した振動片を実現する。
【解決手段】振動片10は、基部11と、基部11の基端部11aから延在された振動腕12,13と、振動腕12,13の第1主面10aと第2主面10bに、基端部11aから振動腕長さLaの約50%の範囲内に設けられる励振電極30,31,40,41と、励振電極30,31,40,41に接続され、かつ振動腕12,13の先端部に設けられた容量部32a,32b,42a,42bと、を有する。このことによって、二次モードのインピーダンスを増加させ、並列容量Cdを容量部32a,32b,42a,42bがない場合よりも大きくすることにより、二次モードの電気機械結合係数K2には影響を与えずに、一次モードのインピーダンスが高くなりすぎることを抑制し、安定した一次モードの励振を実現する。
(もっと読む)
カメラ、カメラ付きロボット
【課題】広角レンズ部と望遠レンズ部とを具備したカメラ、および、それを用いたカメラ付きロボットを提供する。
【解決手段】カメラ50は、広角レンズ(低倍率広角レンズ群1および高倍率広角レンズ群6)を有する第1レンズ部としての広角レンズ部と、前記広角レンズよりも高倍率の望遠レンズ(高倍率望遠レンズ群5)を有し撮影状態を制御可能な第2レンズ部としての望遠レンズ部20と、撮影対象物21からの入射光の光束の光軸11を、広角レンズ部10の光軸13の方向と望遠レンズ部20の光軸12の方向とに分割するハーフミラー2と、広角レンズ部10および望遠レンズ部20を経た入射光を撮像する撮像素子15,16とを含み、望遠レンズ部20の撮像素子16の手前には、光軸12が通過するレンズ41を概光軸12と直交するX−Y方向に動かす駆動部としてのX−Y駆動部40を備えている。
(もっと読む)
圧電アクチュエーター、及び、圧電アクチュエーターの駆動方法
【課題】エネルギー効率の改善及び構成の簡素化を図る。
【解決手段】圧電素子を有し、駆動信号が圧電素子に供給されることによって振動する振動体であって、長辺方向の長さと短辺方向の長さとの比が略n対1(nは2以上の整数)の矩形の平面形状の振動体と、振動体に設けられた当接部であって、振動体の振動に応じて被駆動体に当接する当接部と、を備え、振動体を第1周波数で矩形の長辺方向へ伸縮させる第1振動、及び、振動体を第1周波数とは異なる第2周波数で矩形の短辺方向へ伸縮させる第2振動、を駆動信号によって発生し、第1振動及び第2振動に基づいて、当接部を被駆動体に当接させて被駆動体を駆動する。
(もっと読む)
生体センサーおよび生体情報検出装置
【課題】発光素子24と受光素子26とを備える生体センサーにおいて微弱な光成分を精度良く検出する。
【解決手段】光透過性を有する基板22と、被験体に対し、基板22を介して光を照射する発光素子24と、被験体からの光を、基板22を介して受光して、当該受光に応じた信号を出力する受光素子26と、を備え、基板22のうち、発光素子24および受光素子26との対向面に反射防止性を持たせる。反射防止性を持たせるために、基板22の対向面には例えば反射防止フィルム30を貼付する構成としても良い。
(もっと読む)
スイング分析装置、スイング分析プログラム、および記録媒体
【課題】ユーザーがスイング動作の開始や終了のタイミングを指示する必要がなく、比較的小さい計算負荷でスイングデータの抽出を行うことが可能なスイング分析装置、スイング分析プログラム、およびスイング分析プログラムを記録した記録媒体を提供すること。
【解決手段】スイング分析装置1は、少なくとも、モーション10、データ取得部22、動作検出部24、スイングデータ判定部26を含む。データ取得部22は、モーションセンサー10の検出データを取得する。動作検出部24は、取得した検出データを用いてスイングの動作の検出を行い、スイングの動作が検出されたデータをスイング候補データとして抽出する。スイングデータ判定部26は、スイングに関連付けられる判定条件に基づき、スイング候補データから真のスイングデータを選択する。
(もっと読む)
スイング分析装置、スイング分析プログラム、および記録媒体
【課題】取り扱いが容易であり、スイングのリズムをより詳細に検出するとともに動きの小さいスイングのリズムも検出可能なスイング分析装置、スイング分析プログラム、およびスイング分析プログラムを記録した記録媒体を提供すること。
【解決手段】スイング分析装置1は、少なくとも、角速度センサー10、データ取得部22、動作検出部24を含む。角速度センサー10は、スイングにより複数軸の回りに発生する角速度を検出する。データ取得部22は、角速度センサー10の検出データを取得する。動作検出部24は、スイングの各動作の少なくとも1つを検出する。特に、動作検出部24は、取得した検出データを用いて、複数軸の各々の軸に発生する角速度の大きさの和を計算する角速度計算部240を含む。
(もっと読む)
テープ切断装置、これを備えたテープ印刷装置およびステッピングモーターの制御方法
【課題】導入された切断負荷の異なる複数種の処理テープに対し、簡単且つ適切に切断動作を行うことができる。
【解決手段】切断負荷の異なる複数種の印刷テープTに対し、個々に切断を行うハーフカッター62と、ハーフカッター62を動作させるステッピングモーターであるカッターモーター63と、複数種の印刷テープTの種別を検出するテープ識別センサー37と、カッターモーター63を制御する制御部200と、を備え、制御部200は、テープ識別センサー37の検出結果に基づいて、カッターモーター63に印加する駆動パルスの周期を可変する変調手段を有している。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】マーカーを設定した画像を用いてビジュアルサーボを行うことができるロボット制御システム及びロボットシステム等の提供。
【解決手段】ロボット制御システム10は、参照画像と撮像画像とに基づきビジュアルサーボを行う処理部110と、制御信号に基づきロボット30を制御するロボット制御部120と、参照画像とマーカーとを記憶する記憶部130とを含む。記憶部130は、ワーク40又はロボット30のハンド330の領域にマーカーが設定されたマーカー付き参照画像を、参照画像として記憶する。処理部110は、ワーク40又はロボット30のハンド330の領域にマーカーが設定されたマーカー付き撮像画像を、撮像画像に基づいて生成し、マーカー付き参照画像とマーカー付き撮像画像とに基づきビジュアルサーボを行って、制御信号を生成し、制御信号をロボット制御部120に出力する。
(もっと読む)
2,121 - 2,130 / 51,324
[ Back to top ]