
セイコーエプソン株式会社により出願された特許
901 - 910 / 51,324
発振回路、発振器、電子機器及び発振回路の起動方法
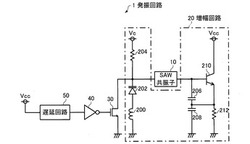
【課題】インダクタンス素子に起因して発生する起動時の異常発振を効率的に抑えることが可能な発振回路、発振器、電子機器及び発振回路の起動方法を提供すること。
【解決手段】発振回路1は、共振子(SAW共振子10)と、増幅回路20と、スイッチング素子(NMOSスイッチ30)と、を含む。増幅回路20は、共振子の一端から他端への帰還経路、当該帰還経路に設けられている第1のインダクタンス素子(伸長コイル200)、当該帰還経路に設けられ、第1のインダクタンス素子と直列に設けられている可変容量素子(可変容量ダイオード202)、を有している。スイッチング素子は、第1のインダクタンス素子と可変容量素子とを含む回路部に対して並列に設けられている。
(もっと読む)
電動機、電動機の製造方法及びコイルユニットの製造方法

【課題】低損失の電動機を実現する。
【解決手段】電動機10は、回転子20と、回転子20を空隙を有して内挿する円筒形状のコイルユニット50と、コイルユニット50を内挿する円筒形状のバックヨーク40と、を有し、コイルユニット50は、半径方向に第1層コイル60と第2層コイル70の2層構造を有し、外周側の第1層コイル60は、複数の扁平に巻回された空芯の個片のコイル61〜66の一つ一つが円周方向に所与の間隙を有して整列配置されており、内周側の第2層コイル70は、第1層コイル60と同数の扁平に巻回された空芯の個片のコイル71〜76の一つ一つが円周方向に所与の間隙を有し、第1層コイル60とは1/2ピッチ位相をずらして配置されており、第1層コイル60と第2層コイル70とが、軟磁性粉と樹脂との混合材80によってインサートモールドされている。
(もっと読む)
MCG測定値のノイズ除去
【課題】ノイズアーティファクトが低減されている心磁図(MCG)システムが、最初に、磁場センサーユニットによって取得される低分解能測定値の高分解能画像表現を作成することを提供する。
【解決手段】高分解能画像表現は、理想的な、ノイズのない高分解能画像のライブラリーを使用してトレーニングされているPCAモデル22を使用することによって作成される。次いで、ビオ・サバールの法則が使用されて、高分解能画像表現を所与として電流インパルスの3Dモデルが作成される。3D電流インパルスモデルから、3D電流インパルスモデルを観測する理論的センサーユニットを使用して得られていたであろうような、理想的なセンサーユニット測定値が合成される。
(もっと読む)
ロボット及びロボットの制御方法
【課題】慣性センサーの出力には基準電位のドリフトやノイズなどの誤差が含まれており、このような情報を利用して制御を行うと正しく制御を行えない可能性や安定性を損なうという課題がある。
【解決手段】アーム21を回動させるアーム駆動機構23と、アーム駆動機構23の回動角度を検出して角度情報を出力する角度センサー34と、アーム21に取り付けられており、アーム21に作用する角速度を検出して角速度情報を出力する角速度センサー32と、アーム21の回動動作を規定する制御指令値を出力する制御指令発生部301と、角速度情報のゲインを漸次変化させて調整するゲイン調整部302と、制御指令値、角度情報、及びゲインを調整された角速度情報に基づいてアーム21の動作を制御するアーム動作制御部303と、を備える。
(もっと読む)
ロボット制御装置、及びロボットシステム
【課題】ロボットシステムの駆動を制御する制御プログラムの開発に際して各種装置の接続の態様や各種装置の設定の簡素化を図ることの可能なロボット制御装置、及び該ロボット制御装置を備えるロボットシステムを提供する。
【解決手段】ロボットまたは該ロボットの周りの対象物を撮像する画像処理装置54の処理結果に基づいて産業用ロボット51の動きを制御するロボット制御装置10であって、外部コンピューターとしての開発用コンピューター53と通信を行う第1通信部と、ネットワークを介して画像処理装置54に接続される第2通信部と、第1通信部が受信するオープンコマンドにより第2通信部の通信ポートをオープンし、ネットワーク上のサーバーを介して画像処理装置54との通信を第2通信部に開始させるコマンド処理部11aとを有する。
(もっと読む)
ロボット制御装置、及びロボットシステム
【課題】ロボットシステムの駆動を制御する制御プログラムの開発に際して各種装置の接続の態様や各種装置の設定の簡素化を図ることの可能なロボット制御装置、及び該ロボット制御装置を備えるロボットシステムを提供する。
【解決手段】ロボットまたは該ロボットの周りの対象物を撮像する画像処理装置54の処理結果に基づいて産業用ロボット51の動きを制御するロボット制御装置10であって、開発用コンピューター53と通信を行う第1通信部と、前記画像処理装置54と通信を行う第2通信部と、前記第2通信部を介して、前記画像処理装置が送信する画像処理データを受信するごとに該第2通信部から画像処理データを格納して、複数回の受信分の画像処理データ群を蓄えるデータバッファー19と、前記第1通信部の受信する受信要求コマンドを受けてデータバッファー19の蓄えた画像処理データ群を第1通信部に送信させるコマンド処理部11aとを有する。
(もっと読む)
画像処理装置、画像処理方法、及び液体吐出装置
【課題】プリンターなど液体吐出装置用の画像処理装置であって、液体を吐出する各ノズルの特性に起因する不具合を適正に補正することができ、また、そのための情報を容易に生成することのできる画像処理装置等を提供する。
【解決手段】画像データに従ってノズルから液体を吐出する液体吐出装置用の画像処理装置が、前記ノズルに対して前記画像データを補正する第一種類の被吐出媒体について予め生成された補正情報に基づいて、前記画像データを補正するノズル特性補正部を有し、前記ノズル特性補正部は、前記画像データの同じ値に対して吐出される前記液体の被吐出媒体上の面積が前記第一種類の被吐出媒体よりも大きい第二種類の前記被吐出媒体に対して前記液体を吐出する場合に、前記補正情報を用いる。
(もっと読む)
印刷物の製造方法、印刷装置
【課題】布や紙等の記録媒体に対して容易に画像を形成する印刷物の製造方法を提供する。
【解決手段】記録媒体に対して、前記記録媒体の目を塞ぐ補助層を形成する補助層形成工程と、前記補助層に対応する領域から空気を吸引して、前記記録媒体を所定の位置で固定する記録媒体固定工程と、固定された前記記録媒体に対して画像を形成する画像形成工程と、を含む。
(もっと読む)
印刷装置、印刷方法及び印刷プログラム
【課題】顔料ブラックインクと染料ブラックインクとを重ねて印刷するときに、良好な画質を得ることができる印刷装置、印刷方法及び印刷プログラムを提供する。
【解決手段】インクを吐出するノズル列の形成されたヘッド41と、媒体を搬送する搬送部と、を備え、ヘッド41のノズル列は、顔料ブラックインクを吐出するノズル列Kp1とノズル列Kp2、及び染料ブラックインクを吐出するノズル列Kdを含み、ノズル列Kp1は、ノズル列Kp2及びノズル列Kd列と媒体の搬送方向においてずれて配置されている。
(もっと読む)
画像処理装置、画像処理方法、及び液体吐出装置
【課題】液体吐出装置用の画像処理装置であって、液体を吐出するノズルが高密度に配置されている場合にノズル毎の補正処理を適正に行うことのできる画像処理装置等を提供する。
【解決手段】画像データに従って複数のノズルから被吐出媒体に液体を吐出する液体吐出装置用の画像処理装置が、予め定められた補正値に従って前記画像データを補正し、前記各ノズルからのインク吐出量を調整する補正処理を実行し、前記補正値は、2以上の所定数の前記ノズル毎に、1つの値が設定される。
(もっと読む)
901 - 910 / 51,324
[ Back to top ]