
オムロン株式会社により出願された特許
1,001 - 1,010 / 3,542
記録装置および記録装置の制御方法
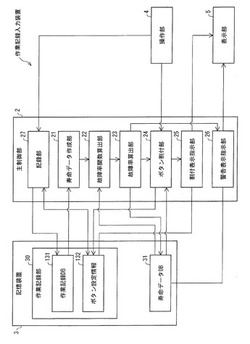
【課題】効率よく作業記録を入力することができる記録装置を提供する。
【解決手段】本発明の作業記録入力装置1は、製造ラインの正常な稼動状態を維持するために製造ラインにおける各設備に対して行った作業内容データを入力する操作部4を備え、操作部4により入力された作業内容データを記録する。作業記録入力装置1は、設備に故障が生じる割合である故障率を算出する故障率関数算出部22および故障率算出部23と、上記作業内容情報の入力を支援する支援情報を出力する割付表示指示部25とを備え、割付表示指示部25は、故障率関数算出部22および故障率算出部23によって算出された故障率が高い故障に関する作業内容データの入力を支援するボタン設定情報132を優先して出力する。
(もっと読む)
光学式計測装置

【課題】表面の一部に傾斜面あるいは曲面が存在する計測対象物体、あるいは傾いた計測対象物体に対して高精度な計測を可能とする光学式計測装置を提供する。
【解決手段】遮光部212は、拡散反射光57の受光中心軸56に対する入射角度範囲を規定するように構成される。すなわち開口212aの径によって、拡散反射光57が遮光部212の開口212aを通過するときに拡散反射光57の進行方向と受光中心軸56とがなす最大角度θが規定される。また、投光部202は、計測対象物体5の表面5Aで正反射された投光ビーム(すなわち反射光ビーム56)のうちレンズ部211により集光される成分について、受光中心軸56上での集光位置Pが受光中心軸56上における遮光部212の範囲内に含まれるように投光ビーム53を投光する。
(もっと読む)
カウント装置
【課題】 カウント入力回路への被カウント信号配線は変更することなく、その被カウント信号をカウントするカウンタを変更したり、あるいは1のカウンタ入力回路へ供給される被カウント信号を、複数のカウンタへ並列に供給することを可能とする。
【解決手段】 入力回路(11−1〜4)の各出力端とカウンタ(13−1〜4)の各入力端との間には分配切替回路(12)が介在され、分配切替回路は、入力回路の各出力端のそれぞれに接続される入力側端子(IN0〜IN1)と、カウンタの各入力端のそれぞれに接続される出力側端子(OUT1〜OUT4)とを有し、かつ入力側端子のそれぞれと出力側端子のそれぞれとの間における導通又は非導通は、任意に設定可能とされる。
(もっと読む)
車両走行路の特徴情報の生成方法および生成装置、ならびに生成処理用のプログラム
【課題】車両走行路を表す3次元情報を処理することによって、車両走行路の具体的な特徴を精度良く表した情報を生成する。
【解決手段】鉄道用軌道を含む所定広さのエリアを対象として生成されたオルソ画像をベクトル化エンジン2において処理することにより、軌道の位置および方向ならびに勾配の変化を表す3次元ベクトルを連ねた3次元ベクトル鎖11を生成する。軌道プロファイル生成エンジン3は、この3次元ベクトル鎖11の提供を受けて、各ベクトルにつき、そのベクトルが左右いずれのカーブに対応するかを特定し、さらにカーブ半径を求める処理や、カーブ半径から直線/曲線の属性を特定する処理などを実行する。さらに特定されたカーブの向きや属性に基づき、3次元ベクトル鎖11を複数の区間に分割し、各区間における軌道の特徴を表す情報を集合させた軌道プロファイル13を生成する。
(もっと読む)
鉄道用軌道の経路情報の生成方法および生成装置、ならびに生成処理用のプログラム
【課題】鉄道軌道を表す連続性の高い特徴を抽出して、鉄道用軌道の経路を精度良く表す情報を生成する。
【解決手段】鉄道用軌道を含む所定広さのエリアを対象として生成されたオルソ画像に、画像中のレール21,22間の画素数より小さく、枕木23間の画素数より大きく、かつ周囲より暗い部位をレール21,22間の間隔の1/2より小さな幅をもって各方向に膨張させる大きさの最小値フィルタ100を適用する。これにより、各レール21,22の幅が広がって、線状領域L1,L2が生成される。また各枕木23が線状領域L1,L2の間で一体化されることにより、線状領域L3が生成される。さらに、この変換後の画像から線状領域L1,L2,L3が幅方向に沿って並ぶ特徴パターンを抽出し、その特徴パターンから長手方向に沿うラインを生成する。さらにこのラインの位置および方向の変化を数値化することによって、鉄道用軌道の経路を表す情報を生成する。
(もっと読む)
基板の欠陥検査装置
【課題】 AOI装置にて挙げられた欠陥候補の真偽判定のための手間と時間を可及的に軽減することができる基板の欠陥検査装置を提供すること。
【解決手段】 ユーザは、ガイド表示として表示された各欠陥候補に関する特徴情報に基づいて1の欠陥候補を選択し、その欠陥候補の実画像を前記画像表示器の画面上において観察することで、当該選択された欠陥候補が疑似欠陥か真の欠陥かを判別できるようにされており、さらにAOI装置により生成保存される特徴情報には、当該欠陥候補のそれぞれの画像を含む局部領域画像が含まれており、かつ欠陥候補表示手段は、各欠陥候補毎に、その欠陥候補に対応する前記局部領域画像を画像表示器の画面上に表示する。
(もっと読む)
制御システム
【課題】エンジン始動時における車両の各部の状態を示すデータを確実に保持出来る制御システムを提供する。
【解決手段】制御部1は、始動開始信号STに基づいて、駆動制御装置3,6へのクランキング信号CRの出力、電源装置16の制御による車両200の各部への電力供給、計時装置31による計時開始を行う。駆動制御装置3,6は、電力供給に基づいて、周辺装置21,24の制御を開始し、検出部23,26にて、始動開始装置11のON操作時における各周辺装置の状態を検出する。そして、検出結果であるデータを、一時記憶部4,7に記憶した後、クランキング信号CRに基づいて、各一時記憶部に記憶されたデータを、記憶部5,8内の所定の記憶領域に記憶する。計時装置31による計時時間が、予め設定された所定時間を超えると、制御部1は、始動制御装置2へクランキング信号CRを出力し、原動装置12が作動する。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】容量をできるだけ少なくして精度の良い3次元モデルを作成する。
【解決手段】3次元認識の対象とするワークの実物モデルWMに対し、ステレオカメラによる3次元計測を複数の方向から実行する。つぎに、各計測により復元された3次元情報のうちの所定数([12][3][6][9]の各計測ポイントの3次元情報)を位置合わせして統合することにより、仮の3次元モデルを作成する。さらに、統合されなかった3次元情報を対象に、仮の3次元モデルによる認識処理を実行し、その認識結果が正しくないと判定された3次元情報(計測ポイント[10]の情報)を仮の3次元モデルに位置合わせしてから統合する。最終的に、正しく認識されなかった3次元情報のすべてが追加された3次元モデルを本登録する。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】実物モデルとカメラとの位置関係を任意に変更して3次元計測を行い、各計測により復元された3次元情報を位置合わせして統合する方法でも、精度の良い3次元モデルを作成できるようにする。
【解決手段】3次元認識の対象とするワークの実物モデルWMの所定箇所に、向きを一意に特定できる形状の多角形のマークMを取り付ける。そして、このマークMが各カメラ11,12,13の視野に含まれる状態が維持されるように実物モデルWMの姿勢を変更して3次元計測を行う処理を、複数回実行する。さらに、毎回の計測により復元された3次元情報のうちの2以上の所定数を選択し、これらを位置合わせして統合した後、統合された3次元情報からマークMに対応する情報を削除または無効化し、その処理後の3次元情報を3次元モデルに設定する。
(もっと読む)
車両認証制御装置
【課題】 部品(好ましくはステアリングロックユニット)を交換した際のID登録作業の簡便化を図った車両認証制御装置を提供する。
【解決手段】 第1判定手段(4)は携帯機(7)の第1識別情報と認証装置(1)の第2識別情報とを照合してそれらの組み合わせが正当なものであるか否かを判定する。第2判定手段(4)は認証装置とは異なる部品(2)の第3識別情報と認証装置の第2識別情報とを照合してそれらの組み合わせが正当なものであるか否かを判定しまた部品に第3識別情報が登録されていない場合は部品が未使用品であると判定する。登録手段(4)は部品が未使用品である場合に第2識別情報を第3識別情報として部品に登録する。
(もっと読む)
1,001 - 1,010 / 3,542
[ Back to top ]