
マツダ株式会社により出願された特許
6,071 - 6,080 / 6,115
車両用サスペンション装置
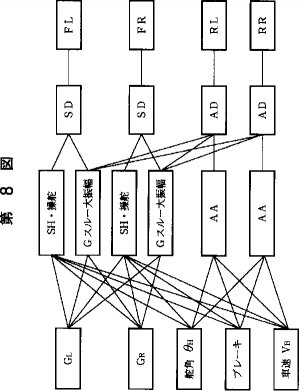
【目的】 コストの低廉価とサスペンション特性制御の両立を高い次元で確保した車両用サスペンション装置を提案する。
【構成】 減衰力をアクチュエータにより変更することのできる可変ダンパを備えた車両用サスペンション装置において、車両の前輪の可変ダンパを駆動するための高速型アクチュエータ(1FL,1FR)と、後輪の可変ダンパを駆動するための低速型アクチュエータ(1RL,1RR)と、前記高速型アクチュエータを車体姿勢信号をフィードバックして制御する一方で、低速型アクチュエータを車速信号VBをフィードフォワードして制御する。
(もっと読む)
車両用サスペンション装置
トロイダル型無段変速機
自動車の走行制御装置

【目的】 車速制御と車間距離制御との間で制御の切換えが繰り返されるのを防止し、前後加減速度の発生を防止して乗り心地の向上を図る。
【構成】 所定の目標車速で定速走行するよう車速を制御する車速制御部と、自車と先行車との車間距離を車間距離検出装置で検出し上記車間距離が所定の目標車間距離となるよう制御する車間距離制御部とを備え、上記車間距離制御部による制御中に自車または先行車の車速が上記車速制御部による制御の目標車速より高くなったとき車速制御部による制御に切換える。更に、先行車の車速VSPが車速制御の目標車速VSPO付近で変動する状況を判断する判断手段31と、上記状況の時車速制御と車間距離制御との間の切換えを規制する規制手段32とを設ける。該規制手段32は、車速制御に切換えた後再度車間距離制御に切換えることを所定時間Tt 禁止する。
(もっと読む)
自動車の特性変更装置及び方法
車両の障害物検知装置
【目的】旋回時に、走行路の極力先方まで障害物検知を可能としつつ、旋回内側にある建物等を走行路上にある障害物として誤って検知するのを防止する。
【構成】旋回内側へレ−ダの検知エリアを拡大することを前提としつつ、ブラインドカ−ブの際にはこの検知エリアの拡大が禁止あるいはオ−プンカ−ブの場合に比して拡大幅が小さくされる。また、左右一対のレ−ダ2L、2Rを備えているときは、旋回時には旋回外側にあるレ−ダのみによって障害物検知を行なう。レ−ダを左右移動式として、旋回時には旋回外側端にレ−ダが位置される。
(もっと読む)
エンジンのバルブタイミング制御装置
【目的】 動弁の開閉タイミングないしはリフト量を変えることができる簡素でかつコンパクトな構造のエンジンのバルブタイミング制御装置を提供する。
【構成】 夫々カムシャフト3の後端部と圧接係合して一体回転することができる第1,第2回転部材17,20が設けられている。ここで、第1回転部材17と第2回転部材20とは螺合部25で螺合し、これによって両回転部材17,20間に回転位相差が生じたときには、両回転部材17,20が前後方向に相対変位し、カムシャフト3が前後方向に移動する。そして、第1,第2ストッパ27,29で第1,第2回転部材17,20の回転を停止させるだけでカムシャフト3を前後方向に移動させてバルブタイミングを変えることができ、バルブタイミング制御装置7が簡素化される。
(もっと読む)
機械式過給機付エンジンの動弁装置
【目的】 吸気遅閉じの機械式過給機付エンジンに最適な動弁装置を得る。
【構成】 吸気遅閉じとした機械式過給機付エンジンにおいて、DOHC式動弁装置の吸気側タペットを機械式タペット13とし、排気側タペットをHLA機構を備えた油圧式タペット14とする。バルブタイミングは過給域で吸気遅閉じを実行するよう可変とする。また、始動域を含む全運転領域で吸気遅閉じを行うよう固定バルブタイミングとしてもよい。
【効果】 ポンピングロスの低減と有効膨張比増大等による耐ノック性の向上を達成しつつ、吸気側スプリング荷重の増大を抑えて駆動抵抗を減らし、排気側の衝撃荷重を抑えて衝撃による音や摩耗を防止するようにできる。また、駆動抵抗の増大を抑えるだけでなく冷間時に吸気遅閉じが過大になるのを防止して、始動時を含め全運転領域で吸気遅閉じを可能とすることができる。
(もっと読む)
エンジンの空燃比制御装置
【目的】 エレキスロットル弁を備えたリーンバーンエンジンに対して、ゾーン切り替え時のトルクショックの発生を有効に防止することができる手段を提供する。
【構成】 エンジンCEにおいては、コントロールユニットCによって、リッチ/リーンのゾーン切り替えが行われるようになっている。ここで、リーンゾーンからリッチゾーンへの切り替えは、吸気負圧が所定の境界吸気負圧以上となったときに行われ、リーンゾーンが可及的に広げられて燃費性能とエミッション性能とが高められ、かつ吸気充填効率が飽和する領域近傍でゾーン切り替えが行われるのが防止され、ゾーン切り替え時のトルクショックが防止される。リッチゾーンからリーンゾーンへの切り替えは図示平均有効圧に基づいて行われ、切り替え時のサイクリングが防止される。
(もっと読む)
車両の操舵装置
【目的】 前輪の操舵時に適正ヨーレイトを発生させて運転性の向上を図ると共に、前輪又は後輪の操舵を安定して行い、車両の安定性を良好に確保する。
【構成】 車輪の横滑り角に対する車輪のコーナリングフォースの変化が比例的である設定線形領域では、車両に制御目標ヨーレイトを発生させる状態フィードバック制御を行う。一方、コーナリングフォースの変化が比例しない設定非線形領域では、この設定非線形領域で後輪の操舵制御が安定な第2の制御則に基いて後輪を操舵制御する。設定線形領域の幅は、車両の運転状態、特に車速、車両に作用する横加速度、車輪の推定横滑り角、後輪又は前輪のコーナリングフォース、車重等に応じて変更される。従って、設定線形領域の幅を適切に設定しつつ、設定線形領域では狙い通りの車両の運転特性が得られると共に、設定非線形領域では車両の安定性を良好に確保できる。
(もっと読む)
6,071 - 6,080 / 6,115
[ Back to top ]