
東芝機械株式会社により出願された特許
61 - 70 / 843
部分中空動力伝達軸の製造方法および部分中空動力伝達軸の製造方法により製造された部分中空動力伝達軸と部分中空動力伝達軸の製造方法により製造された部分中空動力伝達軸を有する油圧装置
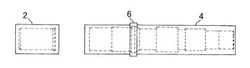
【課題】動力伝達軸に負荷されているトルクを精度良くコンパクトで、コストを抑えて測定することを可能とさせるために、動力伝達軸の一部の肉厚の偏差を低減して中空化する製造方法を提供し、この方法で提供される部分中空動力伝達軸を提供し、さらに、その部分中空動力伝達軸を用いた油圧装置を提供する。
【解決手段】中厚である円筒形状の第1軸素材と、第1軸素材と同径の円筒形状であってその端面から一定の位置にその径より大きなランドを備える中厚の第2軸素材とからなり、前記第2軸素材の端部である中空軸部の内側に前記第2軸素材の半径より小径の円筒状窪みを設け、ランド端部を基準面としてこの基準面と前記窪み底部との距離が一定となるように前記円筒状窪みを刻設し、前記第1素材の端部と前記第2軸素材の前記窪みを有する端面とを摩擦圧接して接合することで形成する。
(もっと読む)
油圧電気ハイブリッドモータ

【課題】油圧モータと電動機と減速機を一軸上に並べて配置し動力合成機構を不要としたことでコストの上昇および取付スペースの増大を回避し、また、油圧モータ及び電動機共に最適な回転速度で駆動することができる油圧電気ハイブリッドモータを提供する。
【解決手段】油圧モータと電動機と減速機とを一軸上に配列し、前記油圧モータと前記減速機との間に前記電動機を配置される。
(もっと読む)
樹脂成形装置
【課題】樹脂成形装置において、ノズルまたはダイあるいはTダイの吐出口の開口面での溶融樹脂の固化を防ぐ。
【解決手段】本発明の樹脂成形装置は、射出装置からノズルまたはダイあるいはTダイを介して金型上に溶融樹脂を吐出し、次いで型締めを行うことにより樹脂製品を成形する樹脂成形装置において、吐出口2の開口面の溶融樹脂を保温または加熱するための赤外線ヒータ4を、吐出口2に向けて吐出口2の斜め前方に配置したことを特徴とする。また、赤外線ヒータを使用して吐出口2の開口面の溶融樹脂を保温または加熱する代わりに、吐出口2を閉鎖するためのシャッタ8を設け、このシャッタ8をヒータ9で加熱しても良い。
(もっと読む)
成形品成形装置および成形品成形方法
【課題】第1の型と第2の型とを用いて成形品を成形する成形品成形装置において、従来よりも短いタクトタイムで精度の高い成形品を得る。
【解決手段】下型M1と上型M2とを用いて成形品W1を成形する成形品成形装置1において、下型型設置体9と下型設置体9に対して相対的に移動位置決め自在である上型設置体11とを備えた成形品成形部3と、成形品W1における、第1パターンW3と第2パターンW4との間の位置ずれ量を測定する位置ずれ量測定部5と、成形品成形部3で成形品W1を成形しているときに、成形品W1の測定を位置ずれ量測定部5で行い、この測定結果に応じて上型設置体11の相対的な位置を補正し成形品成形部3で次の成形品W3の成形をする。
(もっと読む)
塗装用ロボットシステム
【課題】複数の塗装工程を一台のロボットで行えるようにし、装置全体の設置面積を縮小することが可能な塗装用ロボットシステムを提供する。
【解決手段】塗装用ロボットシステム10は、ロボットアーム21を有するロボット20と、ロボット20のロボットアーム21の先端21aに取り付けられた支持部材30と、支持部材30に、回動軸J1、J2を中心に回動自在に取り付けられたスプレーユニット40A、40Bとを備えている。各スプレーユニット40A、40Bは、塗料を塗布する複数のスプレーガン51A−53A、51B−53Bを有している。複数のスプレーガン51A−53A、51B−53Bは、それぞれ前記回動軸J1、J2を中心に一体となって回動し、使用するスプレーガン51A−53A、51B−53Bを切り替え可能となっている。
(もっと読む)
射出装置と成形機および射出装置の制御方法
【課題】一方のボールねじ側に設けた力検出器と他方のボールねじ側に設けたダミー部材とを有する射出装置において、射出圧力等を正確に制御可能な射出装置を提供する。
【解決手段】射出装置13は、射出部の一例であるバレル41を支持する固定側フレーム40と、押出し部材の一例であるスクリュー42を回転可能に支持する移動側フレーム43と、一対のボールねじと、これらボールねじを回転させるサーボモータを有する射出用駆動機構とを備えている。第1のボールねじと移動側フレーム43との間に、ロードセル等の力検出器が設けられている。第2のボールねじと移動側フレーム43との間にダミー部材81が設けられている。制御部14は、力検出器の出力に基いて第1の射出用駆動機構を制御するとともに、力検出器の出力と、力検出器およびダミー部材81のそれぞれのばね定数を考慮した演算とに基いて、第2の射出用駆動機構を制御する。
(もっと読む)
転写装置および転写方法
【課題】型が光を透過しない材質で構成され、また、被成型品にアライメントマークが設けられていなくても、被成型品の正確な位置に微細な転写パターンを転写できる転写装置を提供する。
【解決手段】型Mを保持し、被成型品Wに接近・離反する方向に移動位置決め自在な型保持体9と;被成型品Wを保持し、型保持体9の接近・離反方向に交差する方向に移動位置決め自在な被成型品保持体5と;型Mと被成型品Wとの間に挿入される第1の位置と、型Mと被成型品Wとから離れた第2の位置との間を移動自在な検出子15で被成型品Wの縁の位置を検出して、型Mに対する被成型品Wの位置ずれ量を検出する位置ずれ量検出手段11と;第1の位置に検出子15を位置させて被成型品Wの位置ずれ量を検出し、この位置ずれ量を、型保持体9を移動することによって補正し、型Mを被成型品Wに接触させて転写を行うように制御する制御手段51とを有する。
(もっと読む)
工具、産業用機械及び加工方法
【課題】発泡スチロール等のワークを好適に加工できる工具を提供する。
【解決手段】機械本体の主軸17に着脱可能な工具5は、発電機29から供給される電力によって発熱し、ワークを熱切断するヒータ31と、ヒータ31の温度を目標温度に制御する温度制御部33とを有する。
(もっと読む)
敷ブロック配置回収プログラム、このプログラムを用いた加工方法および工作機械
【課題】敷ブロックの配置および回収を簡単なプログラムによって行うことができる敷ブロック配置回収プログラム、加工方法、および、工作機械を提供。
【解決手段】ブロック格納エリアに配置されたブロックをテーブル上に配置するための敷ブロック配置プログラム87と、テーブル上に配置された敷ブロックをブロック格納エリアに回収するための敷ブロック回収プログラム88とを備る。敷ブロック配置プログラムは、ブロック格納エリアに配置された敷ブロックをテーブル上に配置する複数の動作ステップを有し、これらの動作ステップを設定された順番にコンピュータに実行させる。敷ブロック回収プログラムは、前記複数の動作ステップを、敷ブロック配置プログラムの実行順序とは逆の順序で、かつ、敷ブロック配置プログラムの動作方向とは逆の動作方向へ動作するようコンピュータに実行させる。
(もっと読む)
ワーク切削ラインの表示方法
【課題】半導体ウェハのようなワークでの切削ラインの位置を直観的に認識し易くし、切削ラインの位置の確認を混乱せずに確実に行えるようにする。
【解決手段】第1カメラ22で撮影したワーク全体を映し出す広範囲画像および第2カメラ24で撮影した前記ワークの一部を拡大して映し出す高倍率画像であって工作機械の制御軸座標との対応関係が既知の画像を画像処理装置28により生成し、工作機械の制御装置に記憶しているワークの切削位置データに基づいて画像処理装置により切削ラインの描画データを生成し、ワークの広範囲画像および高倍率画像に切削ラインを重ね合わせてディスプレイ装置30に表示する。
(もっと読む)
61 - 70 / 843
[ Back to top ]