
富士重工業株式会社により出願された特許
201 - 210 / 3,010
車両用駆動装置
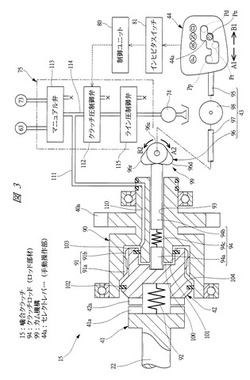
【課題】エンジン再始動に伴う前進クラッチの締結ショックを抑制しつつ、エンジン停止時においてもニュートラル制御を可能とする。
【解決手段】動力伝達径路に設けられる前進クラッチには、油圧が低下するエンジン停止時に滑り状態等に保持するためのスプリングが組み込まれる。これにより、エンジン再始動に伴う前進クラッチの締結ショックが抑制される。さらに、動力伝達径路にはセレクト操作に連動する噛合クラッチ15が設けられており、前進クラッチが滑り状態等に保持されていても噛合クラッチ15を用いてニュートラル制御が可能となる。この噛合クラッチ15を制御するクラッチロッド94には、セレクトレバー44aの動作がカム機構99を介して伝達される。これにより、セレクトレバー44aとクラッチロッド94とを連結した場合でも、噛合クラッチ15をDレンジとRレンジとの双方で締結することが可能となる。
(もっと読む)
環境認識装置および環境認識方法

【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
環境認識装置および環境認識方法
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
車両および車両の制御方法
【課題】蓄電装置からの電力を用いて走行駆動力を発生する車両において、蓄電装置の残容量で走行可能な距離を適切に推定する。
【解決手段】搭載した蓄電装置110の電力を用いて走行が可能な車両100は、ECU300において、蓄電装置110からの電力により走行している際に、予め定められた期間ごとの平均車速および平均駆動力から定まる平均動作点に基づいて基準電費を演算するステップ(S140)と、上記期間中における電力消費量および走行距離に基づいて実電費を演算するステップ(S120)と、基準電費および実電費に基づいて平滑化処理により予測電費を演算するステップ(S150,S160,S170)と、予測電費および蓄電装置110のSOCに基づいて、蓄電装置110に残っている電力により走行可能な走行可能距離RMDを演算するステップ(S180)を実行する。
(もっと読む)
環境認識装置および環境認識方法
【課題】夜間や雨等、光源が拡散し易い環境において、壁でないものを壁と誤判断することを抑制する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の、自車両に対する相対距離を含む位置情報を取得する位置情報取得部160と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が第1所定距離内に連なる複数の対象部位をグループ化して対象物とするグループ化部162と、対象物を構成する複数の対象部位が、自車両の進行方向に垂直な面に対して所定角度以上に傾斜する傾斜面を形成すると、壁の候補である壁候補と判断する候補判断部164と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が、第1所定距離より長い第2所定距離内に連なる複数の壁候補を、壁であると判断する壁判断部166と、を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の規則性に基づいて対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、水平距離の差分および高さの差分が第1所定範囲内にある、同一の特定物に対応すると仮決定された対象部位をグループ化して対象物とし(S304)、任意の対象物から、水平距離の差分、高さの差分、および、相対距離の差分が第2所定範囲内にある、同一の特定物に対応すると仮決定された対象物を順次検出し、対象物群を特定し(S306)、対象物群における対象物の数に応じて対象物群が特定物であるか否かを決定する(S308)。
(もっと読む)
環境認識装置および環境認識方法
【課題】画像が環境光の影響を受ける場合であっても、対象物の特定精度を維持する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、対象部位の高さを取得し、取得された輝度にホワイトバランスを施す場合のホワイトバランス補正値を導出し、ホワイトバランス補正値と、環境光の影響度合いを示す色補正強度とに基づく色補正値を、取得された輝度から減算して補正輝度を導出し、データ保持部154に保持された、輝度の範囲と特定物との対応付けに基づいて、対象部位の補正輝度とから、対象部位に対応する特定物を仮決定する。
(もっと読む)
環境認識装置および環境認識方法
【課題】応答遅延を伴うことなく、適切にホワイトバランス補正を実現する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、取得した輝度の中から道路面の輝度および参照部位の輝度を特定し、参照部位の輝度が第2所定値以上変化していない状態において道路面の輝度が第1所定値以上変化し、道路面の変化後の輝度が所定色でなければ、変化時点から、道路面の輝度が所定色に戻るまで、変化する前のホワイトバランス補正値を維持し、それ以外では、道路面の輝度が所定色として認識できるように、ホワイトバランス補正値を導出し、取得した輝度に、ホワイトバランス補正値によるホワイトバランス補正を施して補正輝度を導出し、データ保持部に保持された、輝度の範囲と特定物との対応付けに基づいて、対象部位の補正輝度から、対象部位に対応する特定物を仮決定する。
(もっと読む)
電動車両用充電装置
【課題】簡単な構成により車両誤発進時の破損及び通常使用時のコネクタ抜けを防止した電動車両用充電装置を提供する。
【解決手段】蓄電手段220を有する電動車両に外部の電源設備300から充電を行なう電動車両用充電装置240であって、一方の端部が電動車両に接続され、他方の端部が電源設備に接続され、電源設備から電動車両に電力を供給する給電ケーブル241と、給電ケーブルに設けられた第1のコネクタ242と、給電ケーブルの第1のコネクタよりも電動車両側に設けられた第2のコネクタ243,244とを備え、第1のコネクタは、給電ケーブルの張力による抜けを防止するロック機構を有し、第2のコネクタは、給電ケーブルの張力によって引き抜き可能である構成とする。
(もっと読む)
201 - 210 / 3,010
[ Back to top ]