
富士重工業株式会社により出願された特許
971 - 980 / 3,010
排気熱回収装置
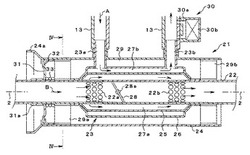
【課題】冷却水温が低い場合は、冷却水に排気熱を効率よく回収させて昇温を促進させると共に、排気熱が高温化した場合は冷却水の昇温を抑制する。
【解決手段】冷態始動時、排気切換弁28にて排気連通管22が閉塞されているため、排気ガスは排気バイパス通路27aへ導かれ、その外周に形成されている熱交換通路27bを流れる冷却水に排気熱が回収される。又、外筒管24内に形成されている断熱空間29が、排気切換弁28に連動して動作する外気遮断弁31にて遮断されているため、排気熱を効率よく回収することができる。そして、冷却水温が上昇すると、排気切換弁28と外気遮断弁31とが開弁し、排気ガスは排気連通管22を通り排出され、又、断熱空間29には外気が導入されるため、冷却水温の上昇が抑制される。
(もっと読む)
バキュームポンプ制御装置

【課題】バキュームポンプの作動頻度を低下させかつブレーキブースタによる倍力機能を確保したバキュームポンプ制御装置を提供する。
【解決手段】負圧式ブレーキブースタ4で用いられる負圧を生成するバキュームポンプ7を制御するバキュームポンプ制御装置10を、ドライバによる減速操作を検出する減速操作検出手段3を備え、減速操作制御手段によって検出された減速操作の開始と終了との少なくとも一方に応じて、バキュームポンプを所定期間にわたって作動させその後停止させる構成とする。
(もっと読む)
歯車対の設計装置、歯車対の設計プログラム、歯車対の設計方法、及び歯車対
【課題】実用に耐え得る良好な歯車対を歩留まり良く効率的に加工するための設計情報を容易に設定することができる歯車対の設計装置を提供する。
【解決手段】演算部6は、各歯面修正量の値の組み合わせからなる歯面修正量群Gを複数パターン設定し、基本諸元に各歯面修正量を付与した諸元を用いて歯面加工を行った際に加工誤差範囲内で製造され得る複数パターンの歯車対を歯面修正量群G毎にシミュレーションし各歯車対における各歯面の歯面誤差分布情報をそれぞれ演算する。歯面修正量群G毎に設定加工範囲内でシミュレーションされた全歯車対に対し、複数の噛み合い条件での各伝達誤差量Eを対応する各歯面誤差分布情報に基づいてそれぞれ演算し、最良の歯面修正量群を抽出する。その際、トルクTqに応じて発生する組付誤差量Dを噛み合いモデルでの各ギヤの変位量に基づき所定トルク毎に演算し、この組付誤差量Dを噛み合い条件として用いる。
(もっと読む)
エンジンの制御装置
【課題】エンジン始動時に点火時期と空気量とを適正に制御し、空燃比リーンによる運転状態の不安定化を招くことなく早期に触媒を活性化させる。
【解決手段】エンジンがクランキングされると、始動時のエンジン水温に基づいて決定される触媒昇温のための点火時期リタード量によるトルクダウンを補うための増量分を加算した目標空気量に制御される。そして、時刻t3でエンジン完爆と判定された後、エンジン回転数が目標アイドル回転数を超えて時刻t4で上昇が止まると、触媒昇温のための点火時期リタード制御が開始される。これにより、触媒昇温のための点火時期リタード制御の途中で空気量が大きく増加することがなく、空燃比リーンになることがない。更に、空燃比リーンによる不安定な挙動がなくなるため、触媒昇温のための点火時期リタード量を大きくすることができ、触媒を有効に昇温させて早期活性化を図ることができる。
(もっと読む)
可動ナット取付構造
【課題】内部へのアクセスが困難な中空構造体に可動ナットを容易に取り付けることができる可動ナット取付構造を提供する。
【解決手段】可動ナット取付構造を、閉断面を有し一体に形成された中空構造体11と、中空構造体の外表面11dと間隔を隔てて対向する保持面部210を有するナットプレート保持部材200と、中空構造体の外表面とナットプレート保持部材の保持面部との間に配置されたプレート部110及びナット部120を有し、中空構造体に対してネジ部の中心軸とほぼ直交する方向に相対変位可能とされたナットプレート100とを有する構成とする。
(もっと読む)
車両の停車監視装置、及び、車両の停車監視装置を備えた車両の停車保持制御装置。
【課題】車両の停車状態と移動状態を精度良く検出して車両の実際の挙動に合致した自然でスムーズな制御を可能とする。
【解決手段】車速センサ2からの車速信号に基づいて、単位時間当たりの車速パルスが設定値以下となって車両が停車したか否か判定し、この判定の結果、車両が停車したと判断した場合は、その時から車速パルス信号の総和ΣPを算出し、該車速パルス信号の総和ΣPが予め設定した判定値Cp以内の場合は車両が停車状態と判定する一方、判定値Cpを越える場合は車両が移動状態と判定する。こうして判定される車両の移動状態及び停車状態を基に、予め設定した作動条件が成立して、且つ、車両停車状態と判定された場合に車両停車保持をスタートさせて所定の制動力を発生させる。一方、車両の停車保持中に車両移動状態を判定した場合は、停車保持制御のフェールセーフ制御へと移行する。
(もっと読む)
シミュレーション装置、シミュレーション方法およびシミュレーションプログラム
【課題】車体に付着した塗料の垂れを予測する。
【解決手段】複数の要素に分割される数値計算モデルに基づいて、節点毎にこれに隣接する節点が設定される(ステップS3)。隣接する節点間における傾斜角αが重力方向を基準として演算される(ステップS8)。節点間の傾斜角αと車体に作用する温度とに基づいて、各節点における塗料流出量Voutおよび塗料流入量Vinが演算される(ステップS9,10)。続いて、初期付着量V0、塗料流出量Voutおよび塗料流入量Vinに基づいて、各節点における所定時間後の塗料付着量Vt+1が演算される(ステップS11)。そして、これらのステップを繰り返して実行することにより、温度変化に伴う塗料の粘度変化を考慮しながら、車体に付着した塗料の垂れを予測することが可能となる。
(もっと読む)
清掃ロボットの自律走行システム
【課題】予め記憶された走行経路情報を変更することなく、清掃不要エリアへの進入が未然に防止できる清掃ロボットの自律走行システムを提供する。
【解決手段】清掃ロボット10による清掃途中において、清掃ロボット10に配設した光検出センサにより予め配設された既存の照明灯による所定照度以上の光検出に基づいて清掃不要エリアAを判断し、隣接する清掃エリアにおける走行経路に変更して走行して清掃する。清掃不要エリアにおける業務等が清掃する清掃ロボットに影響されることなく、業務に支障をもたらすことがない。また、清掃不要エリアにおける人と清掃ロボット10との接触等が回避でき、安全性が向上する。
(もっと読む)
自動変速機の制御装置
【課題】変速開始点において推定した供給圧が実際の圧力よりも低い場合は、変速開始点で検出した入力トルクと供給圧とのデータの蓄積を行わないようにして、目標供給圧の信頼性を高める。
【解決手段】供給圧推定部40は変速開始点での変速機の変速状態と目標供給圧Pcとに基づき摩擦締結要素に供給されている供給圧Piを推定する。サンプルデータ記憶部41は変速開始点での入力トルクTiと供給圧Piとを記憶し順次更新する。目標供給圧算出部44は入力トルクTiに基づいて設定した基本供給圧Poを、サンプルデータ記憶部41に記憶されている入力トルクTiと供給圧Piとに基づいて設定した補正定数ac,bcで補正して目標供給圧Pcを設定する。データ更新判定処理部42は変速開始点以降の減速比εの変化が予め設定した判定値SL1,SL2の一方を超えた場合、今回の入力トルクTiと供給圧Piの蓄積を中止する。
(もっと読む)
自律走行車の走行システム
【課題】設置費用の低減及び設置作業の簡素化ができる自律走行車の走行システムを提供する。
【解決手段】第1磁石21を保持する第1ホルダと第2磁石22を保持する第2ホルダが一体形成された走行経路杭1を走行経路基準線Waと直交する状態で間隔を有して連続的に地中に埋設する。自律走行車に設けた一対の第1磁気センサ45及び第2磁気センサ46により第1磁石21及び第2磁石22の磁気検知を行い、その結果に基づいて操舵制御手段で操舵し、走行経路基準線Waに沿って走行する。そのため、埋設される走行経路杭1の間隔が比較的大きく離間して配置しても自律走行車の走行が抑制される。これにより埋設される走行経路杭1を削減でき、走行経路杭の設置費用の低減及び設置作業の簡素化が可能になる。
(もっと読む)
971 - 980 / 3,010
[ Back to top ]