
フジノン株式会社により出願された特許
101 - 110 / 2,231
ズームレンズおよび撮像装置
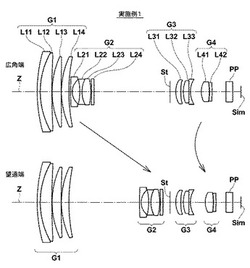
【課題】ズームレンズにおいて、小型で良好な光学性能を保持するとともに、低コスト化を図る。
【解決手段】ズームレンズは、物体側から順に、正の第1レンズ群G1、移動して変倍を行う負の第2レンズ群G2、絞り、正の第3レンズ群G3、変倍に伴う像面位置の補正および合焦を行う正の第4レンズ群G4を備える。第2レンズ群G2は少なくとも2枚の負レンズを含む。第2レンズ群G2の最も像側にはプラスチック非球面レンズが配される。該プラスチック非球面レンズの焦点距離をf2aとし、第2レンズ群G2の焦点距離をf2としたとき、条件式(1)を満たす。
2.4<|f2a/f2|<10.0 … (1)
(もっと読む)
斜方蒸着による複屈折素子製造方法

【課題】1枚の基板から、効率良く、安定した品質の複屈折素子を複数得る。
【解決手段】複屈折基板18は、ガラス基板上に複屈折性を示す斜方蒸着膜を設けたものであり、その大きさは複数の複屈折素子を切り出すことができる大きさとなっている。複屈折基板18の進相軸の方向は複屈折基板18内の位置によって異なり、複屈折基板18の中央及び左右各部において進相軸22C,22R,22Lのように放射状に分布する。このため、複屈折基板18から複屈折素子を切り出すときに、複屈折基板18内での各々の複屈折素子の向きが、複屈折基板18内で斜方蒸着膜の蒸着源に近い側から遠い側にかけて広がる放射状の向きとなるように、複屈折基板18を切断する。
(もっと読む)
光波干渉測定装置
【課題】凹面部と凸面部と軸外停留点部を有する被検面の形状を測定できるようにする。
【解決手段】被検面80の凹面部81を測定する場合には、球面波からなる測定光が一旦収束した後に発散しながら凹面部81に照射されるように、凸面部82を測定する場合には、球面波からなる測定光が収束しながら凸面部82に照射されるように、干渉光学系2に対する被検面80の測定光軸L方向の位置をサンプルステージ用いて変化させる。また、軸外停留点部83を測定する場合には、平面波からなる測定光が軸外停留点部83に照射されるようにする。
(もっと読む)
画像処理機能を有するカメラシステム
【課題】ハイビジョン信号を標準の解像度の処理回路で処理する場合でも処理速度の高速化及びコストパフォーマンスの最適化を計る。
【解決手段】光学系により結像された被写体像を撮像しハイビジョン信号を出力する撮像手段と、前記撮像手段から出力されたハイビジョン信号を、より画素数の少ない信号に変換する信号変換手段と、前記信号変換手段によって変換された信号を入力し、該入力信号を1フレーム分の画像データに展開する画像変換手段と、前記画像データに対して所定の画像処理を行う画像処理手段とを備えたことを特徴とする画像処理機能を有するカメラシステムを提供することにより前記課題を解決する。
(もっと読む)
オートフォーカス装置
【課題】AFシステムにおいてカメラマンがピントを合わせたい範囲にAF枠を容易に自動で設定する。
【解決手段】カメラの撮影画面内においてピントを合わせるフォーカス操作手段と、前記フォーカス操作手段によるピント合わせの結果を示す前記撮影画面内におけるベストピント状態の範囲を検出するベストピント範囲検出手段と、前記検出されたベストピント状態の範囲に対して、前記撮影画面のうちオートフォーカスによりピントを合わせる対象範囲であるAFエリアの範囲を示すAF枠の位置を自動で設定するAF枠自動設定手段と、を備えたことを特徴とするオートフォーカス装置を提供する。
(もっと読む)
AF枠自動追尾機能を備えたオートフォーカスシステム
【課題】オートフォーカスによるピント合わせの対象として人物の顔画像を追尾する場合に、顔検出処理による追尾と、パターンマッチング処理による追尾を併用し、より確実に顔の追尾を行えるようにしたAF枠自動追尾機能を備えたオートフォーカスシステムを提供する。
【解決手段】AFによるピント合わせの対象として追尾する被写体がAF枠内となるようにユーザがAF枠を設定すると(S100)、自動追尾の処理が開始され、取り込まれた撮影画像の中から顔画像の検出が行われ(S110)、AF枠の近傍範囲に顔画像が検出されたか否かが判断され(S112)、顔画像が検出された場合には、その顔画像の位置に基づいてAF枠の位置が変更される(S118)。一方、その近傍範囲に顔画像が検出されなかった場合には、パターンマッチング処理が行われ(S114)、これによって検出された追尾対象の被写体の位置にAF枠の位置が変更される(S118)。
(もっと読む)
ズームレンズおよび撮像装置
【課題】ズームレンズにおいて、小型かつ広角に構成し、高い光学性能を保持する。
【解決手段】ズームレンズは、物体側から順に、正の屈折力を有する第1レンズ群G1と、負の屈折力を有する第2レンズ群G2と、正の屈折力を有する第3レンズ群G3と、正の屈折力を有する第4レンズ群G4とを備え、広角端から望遠端への変倍において、各レンズ群の間隔が変化する。第2レンズ群G2は、物体側から順に、負レンズL21、負レンズL22、少なくとも1面の非球面を有する正レンズL23からなる。下記条件式を満たす。
νp<23 (1)
νn−νp>17 (2)
Np≧1.9 (3)
ただし、
νp:第2レンズ群G2の正レンズL23のd線に対するアッベ数
νn:第2レンズ群G2に含まれる負レンズL21、L22のd線に対するアッベ数の平均
Np:第2レンズ群G2の正レンズL23のd線に対する屈折率
(もっと読む)
画像処理機能を有するカメラシステム
【課題】処理結果を表示させる画面の実映像からの遅れを低減させて使用者の違和感を少なくする。
【解決手段】光学系により結像された被写体像を撮像する撮像手段と、前記撮像手段から入力された撮影画像を1フレーム分の画像データに展開する画像変換手段と、前記画像データに対して所定の画像処理を行う画像処理手段と、前記画像処理結果を前記画像データに対して合成する画像合成手段と、前記画像処理結果が合成された画像データから表示用画像を生成する表示画像生成手段と、前記表示用画像を表示する画像表示手段と、を備え、前記画像合成手段は、前記画像データに対して1フレーム前の画像データに対して前記画像処理手段が行った画像処理結果を合成することを特徴とする画像処理機能を有するカメラシステムを提供する。
(もっと読む)
AF枠自動追尾機能を備えたオートフォーカスシステム
【課題】顔検出処理とパターンマッチング処理とを併用してオートフォーカス(AF)におけるAF枠の自動追尾を行う場合に、処理時間を増大させることなく移動の速い被写体でも追尾させることができるようにする。
【解決手段】AF枠の自動追尾の処理を行う画像処理ユニット18には、テレビカメラ10から取り込んだ撮影画像を、デコーダ36を介してパターンマッチング処理演算ボード32と顔検出処理演算ボード34とに取り込み、各々の演算ボードにおいて、パターンマッチング処理と顔検出処理が個別に行われるようになっている。画像処理ユニット18はメインボード30のCPU38により統括されており、CPU38は、パターンマッチング処理演算ボード32と顔検出処理演算ボード34の演算結果を使用してAF枠の位置、大きさ、形状を決定する。
(もっと読む)
AF枠自動追尾機能を備えたオートフォーカスシステム
【課題】AF枠内に人物の顔(顔画像)が含まれる場合に、顔画像の位置及び大きさに適合するようにAF枠を適切な範囲に自動で変更する。
【解決手段】ユーザが追尾対象とする人物の顔画像102を含むようにAF枠100を設定すると、その人物の顔画像102の位置及び大きさに適合するようにAF枠100の範囲が変更される。もし、ズーム操作などによって人物の顔画像102が縮小された場合にはAF枠もその顔画像102の変化に合わせて縮小される。
(もっと読む)
101 - 110 / 2,231
[ Back to top ]