
株式会社安川電機により出願された特許
11 - 20 / 2,482
リニアモータ
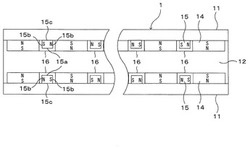
【課題】界磁の永久磁石をヨークに固定する際の永久磁石の破損を防止できるようにする。
【解決手段】磁気的空隙を介して対向配置される界磁1と電機子2を備え、界磁1を固定子、電機子2を可動子とするリニアモータ100であって、界磁1は、平板状の界磁ヨーク11と、界磁ヨーク11に交互に極性が異なるように直線状に並べて固定された複数の主極磁石14及び補極磁石15と、補極磁石15の磁気的空隙側の面15a、及び、2つの隣接する主極磁石14側の面15b,15bに設けられた補強部材16とを有する。
(もっと読む)
電子部品冷却ユニット、巻線切替器、回転電機

【課題】電子部品冷却ユニットの冷却面積を増大させて冷却性能を向上させる。
【解決手段】冷却水を循環させる水冷冷却室35が内部に形成された切替制御ユニットフレーム31と、切替制御ユニットフレーム31に備えられ、ダイオードモジュール32とIGBTモジュール33が搭載される少なくとも1つの上面壁35aと、切替制御ユニットフレーム31に備えられ、上面壁35aの周囲を取り囲む側面と、切替制御ユニットフレーム31の側面に互いに隣接して設けられ、水冷冷却室35に連通する供給口ノズル37と排出口ノズル38と、を有し、水冷冷却室35は、供給口ノズル37と排出口ノズル38を両端としたる略U字型形状であり、上面壁35aから見た流路幅が、切替制御ユニットフレーム31のノズル37,38側よりも開放口31a側の方が大きくなるように、形成されている。
(もっと読む)
回転子コア、回転子および回転電機
【課題】永久磁石の磁束漏れを低減すること。
【解決手段】実施形態にかかる回転子コアは、複数の磁石穴と、空洞部とを備える。磁石穴は、周方向に並んで形成され、永久磁石が挿入される。また、空洞部は、複数の磁石穴のうち、互いに隣接し、かつ、径方向に対する磁極の向きが逆向きの永久磁石がそれぞれ挿入される2つの磁石穴によって挟まれる領域に対して形成される。
(もっと読む)
開梱装置及び開梱済物品の製造方法
【課題】梱包材の切り屑が内容物に混入し難いように開梱することができる開梱装置を提供する。
【解決手段】梱包物を開梱して内容物を取り出す開梱装置であって、前記梱包物において、前記内容物が一次梱包材により梱包されて一次梱包物が形成され、前記一次梱包物が二次梱包材により梱包されて二次梱包物が形成され、前記二次梱包物における前記二次梱包材には切れ目が設けられており、ロボット10と、ロボット10が、前記二次梱包材の前記切れ目から前記一次梱包物を取り出し、さらに前記一次梱包物から前記内容物を取り出すように前記ロボット10を制御する制御部とを備える。
(もっと読む)
搬送ロボット
【課題】構造の簡略化を図るとともに装置にかかる製造コストおよび重量を抑えることができること。
【解決手段】搬送ロボットは、搬送物を保持する水平アームユニットと、一対の脚部ユニットとを備える。一対の脚部ユニットは、第1関節部が連結された第1リンクと、第2関節部に連結され、第3関節部を介して水平アームユニットが支持される第2リンクとをそれぞれ有する。また、一対の脚部ユニットに設けられる関節部の総数よりも少ない数の駆動源が関節部のいずれかに設けられるよう搬送ロボットを構成する。
(もっと読む)
回転電機
【課題】スラスト軸受を冷却可能とした回転電機を提供する。
【解決手段】主軸と、主軸のラジアル方向を軸支持するジャーナル軸受と、主軸のスラスト方向を軸支持するスラスト軸受と、主軸をジャーナル軸受およびスラスト軸受を介して支持するフレームと、を備え、スラスト軸受は、スラスト軸受を冷却するための冷却液を流す冷却液路が形成されている。また、主軸は、スラストフランジ部に対する負荷側を縮径させた縮径部が形成されており、縮径部側に配置された第2のスラスト軸受部に、主軸の縮径分に相当する拡幅部分を形成し、拡幅部分に冷却液路を形成するための冷却液路形成領域を形成している。
(もっと読む)
荷役装置及び荷役方法
【課題】同一のパレットに対して複数のロボットハンドをアクセスさせる構成を備えながら、ロボットハンド同士が接触しないように、かつ作業速度を向上させることができる荷役装置及び荷役方法を提供する。
【解決手段】パレット上の複数のアクセス位置に対して、ワークの荷役を行う荷役装置であって、前記パレット上の前記複数のアクセス位置に順次アクセスする複数のハンドと、前記複数のハンドのうちの第1のハンドのアクセス位置を管理する管理部と、前記第1のハンドの前記アクセス位置に応じて前記複数のハンドのうちの前記第1のハンドとは異なる第2のハンドの移動経路を決定する決定部とを備える。
(もっと読む)
電力変換装置
【課題】電力変換部が備える複数の電力変換器の各出力電圧に関する制御を効率的に行うことができる電力変換装置を提供すること。
【解決手段】実施形態の一態様に係る電力変換装置は、電力変換部と制御部とを備える。電力変換部は、同一周期の基準信号に基づいて電圧を出力し、基準信号の位相がそれぞれ基準信号の周期の1/2N(Nは、2以上の整数)周期分ずつずれたN個の電力変換器を有する。制御部は、基準信号の1/2周期を制御周期としてN個の電力変換器のそれぞれを制御し、N個の電力変換器の制御タイミングをそれぞれ基準信号の周期の1/2N周期分ずつずらした。
(もっと読む)
ロボットシステムおよび加工品の製造方法
【課題】スループットの向上を図ること。
【解決手段】上記した課題を解決するために、把持機構を含むロボットと、指示部とを備えるようにロボットシステムを構成する。上記のロボットは、被加工品の加工に用いる複数種類の供給材のうち1つを把持し、上記の指示部は、同一の被加工品の加工に複数の供給材を用いる場合に、前回の被加工品の加工の最後に把持した供給材を、次回の被加工品の加工の最初に用いる動作を上記のロボットへ指示する。
(もっと読む)
ロボット
【課題】適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】実施形態に係るロボットは、基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を有するロボットである。第2構造体は、板状の主構造部と、主構造部と所定の間隔をあけて対向するとともに、主構造部よりも板厚が薄い板状の補助構造部とを有する。第1構造体および第3構造体は、主構造部と補助構造部とで挟まれるように支持されており、軸受部材を介して主構造部および補助構造部とそれぞれ回転自在に接続される。
(もっと読む)
11 - 20 / 2,482
[ Back to top ]