
株式会社安川電機により出願された特許
31 - 40 / 2,482
交流直流変換器
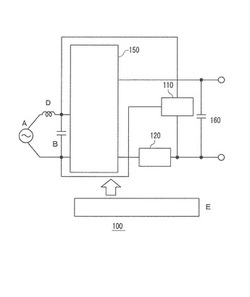
【課題】回路を流れる電流の経路にある半導体素子の数を減らすことにより、導通損失を低減する交流直流変換器を提供する。
【解決手段】
本発明に係る交流直流変換器は、交流電源から出力された交流電圧を直流電圧に変換する交流直流変換器であって、前記交流電圧を整流して前記直流電圧を出力する整流手段と、リアクトルと、キャパシタと、前記交流電源に接続されたスイッチング整流手段とを備え、前記スイッチング整流手段のスイッチングにより、前記キャパシタの端子間に直流電圧を出力する。
(もっと読む)
ロボット装置、ロボットシステムおよび被加工物の製造方法

【課題】保持対象物取り出し工程に要する時間を短縮することが可能なロボット装置を提供する。
【解決手段】このロボット装置(ロボットシステム100)は、ワーク201を保持するためのハンド部15を含むロボットアーム11と、ロボットアーム11に取り付けられ、ロボットアーム11によりワーク201を搬送しながら、ハンド部15に保持されたワーク201の保持状態を検出するための保持状態検出用カメラ3とを備える。
(もっと読む)
ロボットシステムおよび被加工物の製造方法
【課題】保持対象物の配置状態を検出する際のハレーション(ぼやけ)を抑制することが可能なロボットシステムを提供する。
【解決手段】このロボットシステム100は、内部に複数のワーク201が配置され、網状に形成されている仮置き部4a、4b、4cおよび4dと、網状に形成されている仮置き部4a、4b、4cおよび4dの内部に配置された複数のワーク201の配置状態を検出するための配置状態検出部3と、配置状態検出部3により検出された複数のワーク201の配置状態に基づいて、ワーク201を保持するハンド部15を含むロボットアーム11とを備える。
(もっと読む)
ロボットシステム
【課題】メンテナンス作業にかかる時間を低減することができること。
【解決手段】ロボットシステムは、ロボットと、制御部とを備える。ロボットは、所定の方向へ作動する複数の可動部および可動部へ接続されるリンクを有し、制御部は、ロボットの可動部の作動を制御する。また、所定の可動部を停止させた状態で、所定の可動部以外の可動部を作動させることによって所定の可動部に装填される着脱可能な部材を移載するようロボットシステムを構成する。
(もっと読む)
ギヤユニットおよびロボット
【課題】同軸のインナー軸およびアウター軸に、それぞれ独立して動力を直接伝達可能としたコンパクトなギヤユニットを提供する。
【解決手段】同心二軸の出力軸を構成する同軸のインナー軸(2)およびアウター軸(3)と、それぞれ出力軸と直交する方向に延在し、インナー軸(2)に連動連結する第1の入力軸(4)およびアウター軸(3)に連動連結する第2の入力軸(5)とを備える。インナー軸(2)に取り付けられたインナーギヤ(6)と、アウター軸(3)に取り付けられたアウターギヤ(7)とを、互いに対向状態に配置する。そして、第1の入力軸(4)と第2の入力軸(5)とを、出力軸の軸方向に互いに所定距離(L)だけ離隔して配置し、インナーギヤ(6)に第1の入力軸(4)の第1入力ギヤ(8)を噛合させる一方、アウターギヤ(7)には第2の入力軸(5)の第2入力ギヤ(9)を噛合させる。
(もっと読む)
ハンドおよび基板搬送装置
【課題】効率よく基板を除電できること。
【解決手段】上記の課題を解決するために、複数のフォークと、生成部であるところのイオナイザと、噴出部であるところの噴出孔とを備えるようにハンドおよびかかるハンドを備える基板搬送装置を構成する。上記の複数のフォークは、基板を載置する。上記のイオナイザは、上記のフォークの内部に設けられ、イオン化した気体を生成する。上記の噴出孔は、上記のイオナイザによって生成されたイオン化した気体を噴出する。
(もっと読む)
ギヤユニットおよびロボット
【課題】出力方向が互いに反対向きで、かつ同軸のインナー軸およびアウター軸に、それぞれ独立して動力を直接伝達可能で、しかもコンパクトなギヤユニットを提供する。
【解決手段】同心二軸の出力軸により構成され、出力方向を互いに反対向きとした同軸のインナー軸およびアウター軸と、それぞれ出力軸と直交する方向に延在し、インナー軸に連動連結する第1の入力軸およびアウター軸に連動連結する第2の入力軸とを備える。また、インナー軸の中途に取り付けられたインナーギヤと、アウター軸の基端に取り付けられたアウターギヤとを、互いに対向状態に配置する。そして、第1の入力軸と第2の入力軸とを、出力軸の軸方向に互いに所定距離だけ離隔して配置し、インナーギヤに第1の入力軸の第1入力ギヤを噛合させる一方、アウターギヤには第2の入力軸の第2入力ギヤを噛合させる。
(もっと読む)
ハンドおよびロボット
【課題】部材の摩耗を抑えてメンテナンスの手間を軽減すること。
【解決手段】上記した課題を解決するために、基部であるプレートと、かかるプレートに配置され、半導体ウェハなどの基板の周縁部にそれぞれ接してかかる基板を把持する支持部であるところの把持爪を複数個備えたハンドおよびロボットにおいて、かかる把持爪の少なくとも1つは、基板の周縁部の当接を受けながら基板の周縁部に沿って回転するようにハンドおよびロボットを構成する。
(もっと読む)
搬送ロボットおよび基板処理装置
【課題】アーム部の昇降範囲を大きくしつつ、最低限必要な高さ位置までアーム部を降下可能とした搬送ロボットおよび基板処理装置を提供する。
【解決手段】アーム部(12)を水平方向に回転自在に支持し、所定の基台設置フレーム(23)に設置される基台部(13)と、基台部(13)内に立設した縦軸に沿ってアーム部(12)を、基台部(13)の上方に規定されたアーム部昇降範囲(α)内で昇降させる昇降機構(7)とを備える。基台部(13)は、基台設置フレーム(23)に形成された基台収容凹部(25)内に、底壁(131)から所定高さ(h)に設定された基台固定用フランジ(8)までを埋没させた状態で固定されている。
(もっと読む)
回転電機
【課題】軸受の軌道輪と転動体との接触部の面圧上昇を可及的に抑制可能とし、寿命の短命化を防止することの可能な回転電機を提供する。
【解決手段】枠体に軸受を介して回転自在に支持された回転軸と、回転軸に取付けられており、回転軸と一体的に回転する回転子と、枠体に、回転子と対向して取付けられた固定子とを備えている。さらに、軸受に対し、回転軸の軸方向にスライド自在とした支持部材を介して回転軸の軸方向に圧力を付与する予圧装置を備えている。
(もっと読む)
31 - 40 / 2,482
[ Back to top ]