
ヤンマー株式会社により出願された特許
991 - 1,000 / 3,810
油圧無段変速機付き自走式車両
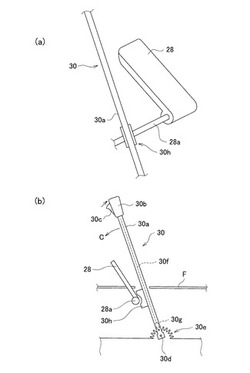
【課題】所望の位置でアクセルを保持することのできるクルーズコントロール機構を備える油圧無段変速機付き自走式車両を提供する。
【解決手段】HST(油圧無段変速機)1と、回動させることによってHST1の変速操作をする前進アクセルペダル(変速操作部材)28と、前進アクセルペダル28の回動位置を保持するクルーズコントロール機構30とを有するHST付きトラクタ(自走式車両)21において、クルーズコントロール機構30が摩擦部材30hを備え、摩擦部材30hによって前進アクセルペダル28の回動位置を保持する。
(もっと読む)
コンバイン

【課題】外側方へ刈取部を回動させて機体の前方を開放可能としたコンバインを提供すること。
【解決手段】機体フレームの前部に昇降シリンダ74を介して刈取部3を昇降自在に取り付けると共に、同刈取部3は外側部を上下方向の軸線廻りに回動自在に枢支して、同刈取部3を外側方へ回動させることで機体フレームの前方を開放可能としたコンバインにおいて、シリンダ支持体81の一側部は刈取部3の外側部と同軸的に上下方向の軸線廻りに回動自在に枢支すると共に、同シリンダ支持体81の他側部は機体フレームに固定・解除自在として、同シリンダ支持体81と刈取部3との間に昇降シリンダ74を介設している。
(もっと読む)
コンバインの排藁搬送装置
【課題】排藁搬送装置を楽に排藁搬送姿勢と排藁詰まり解除姿勢とに姿勢変更すること。
【解決手段】機体の後部に配設した排藁処理部に、脱穀処理した排藁を未刈側から既刈側に搬送する排藁搬送装置を設け、同排藁搬送装置には排藁の株元部を挟扼して搬送する挟扼搬送部と、排藁の穂先部を係止して搬送する係止搬送部を設けると共に、両搬送部は排藁搬送姿勢と排藁詰まり解除姿勢とに姿勢変更操作体を介して姿勢変更自在としたコンバインの排藁搬送装置において、姿勢変更操作体45は機体の後方から操作可能とした。作業者は圃場の既刈側である機体の後方に立って姿勢変更操作体45を操作することができる。この際、作業者は圃場の未刈穀稈を踏み倒さないようにして注意する必要性も煩雑さもないため、刈取作業の途中でも速やかに姿勢変更操作体45を操作することができて、楽に排藁詰まりを解除することができる。
(もっと読む)
コンバイン
【課題】位置調整装置41を大型化することなく分草杆43の左右方向の移動量を十分に確保することができるとともに、分草杆43の上下位置を変動させることなく分草杆43の左右位置を変更することができるコンバイン1の提供を目的とする。
【解決手段】機体の前部に設けられる刈取部3と、一側端が刈取部3の横外側に揺動自在に接続され、他側が機体フレーム9の後方向に延伸される分草杆43と、一側端が分草杆43に揺動自在に接続される支持杆42と、刈取部3または機体に配設され、支持杆42の他側端を、機体の前後方向に移動自在、かつ機体フレーム9の前後方向に揺動自在に支持する位置調整装置41と、を具備する。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、前記耕耘機構3を進行方向前側にして進行する際に接地して前記走行部2と共に前記機体1を支持する補助輪体40を昇降調節可能に取り付ける。
(もっと読む)
コンバイン
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
DC−DCコンバータ回路
【課題】迅速なモード切換処理を行うことができる上、従来よりも半導体素子の導通損を低減でき、これにより電力変換効率を向上させることができるDC−DCコンバータ回路を提供する。
【解決手段】DC−DCコンバータ回路10は、半導体スイッチS1,S2,S4〜S6と、ダイオードD3と、インダクタLとを備え、半導体スイッチS1,S2及びダイオードD3は、何れもインダクタLの一端に接続されており、半導体スイッチS4〜S6は、何れもインダクタLの他端に接続されており、半導体スイッチS1,S4のインダクタLの接続端とは反対側端に第1電圧源E1が接続され、半導体スイッチS2,S5のインダクタLの接続端とは反対側端に第2電圧源E2が接続され、ダイオードD3及び半導体スイッチS6のインダクタLの接続端とは反対側端に第1電圧源E1と第2電圧源E2との双方が接続される。
(もっと読む)
船舶のアウトドライブ装置
【課題】トローリング用の油圧回路を省スペースで儲け、しかもメンテナンスを容易にすることができるアウトドライブ装置を提供する。
【解決手段】推進用のプロペラ4と、プロペラの駆動を制御する油圧クラッチ8と、油圧クラッチからの駆動出力を前記プロペラに伝動する伝動機構と、油圧クラッチを作動する油圧回路と、油圧クラッチ、伝動機構、及び油圧回路の少なくとも一部を収容するハウジング32と、を備え、油圧回路は、プロペラの回転方向を切り換える切換弁と、油圧クラッチへの圧油を減圧し、トローリング走行を行うための減圧弁と、減圧弁へ導入される圧油用のフィルタと、油圧クラッチに対して圧油を供給する油圧ポンプと、を備えており、切換弁、減圧弁、及びフィルタが装着される基台10をさらに備え、この基台はハウジングに着脱自在に取り付けられている。
(もっと読む)
物体分別装置
【課題】物体を正確に第2搬送体にて搬送することが可能な物体分別装置を提供する。
【解決手段】トマト(物体)Cを搬送して分別する第1コンベア(第1搬送体)10と、搬送されるトマトCの位置を光学的に検出する位置検出手段11と、トマトCのグレードを測定するグレード測定手段12と、位置検出手段11で検出されたrトマトCの位置およびグレード測定手段12で測定されたトマトCのグレードに基づいて、トマトCを所望の位置で第1コンベア10から送り出す複数の送出ベルト13と、送り出されたトマトCを引き受けてさらに搬送する第2コンベア(第2搬送体)14とを備える選果機(物体分別装置)1において、グレードに応じてトマトCが送り込まれる複数の搬送レーンを第2コンベア14上に備え、複数の搬送レーンは、第2コンベア14をその長手方向に仕切板(仕切部材)16によって複数に区分して形成され、複数の搬送レーンの幅(W1〜W4)は、送り込まれる物体のグレードに応じてそれぞれ異なるようにする。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、地面に接地する起立姿勢と地面から離れる収容姿勢とに姿勢変更可能に構成された補助輪体40を取り付ける。補助輪体40は、上端側を回動支点として機体1に上下回動可能に取り付けられたスタンド部41と、スタンド部41の下端側に回転可能に設けられた補助輪42とを備える。
(もっと読む)
991 - 1,000 / 3,810
[ Back to top ]