
ヤンマー株式会社により出願された特許
2,801 - 2,810 / 3,810
オーガ制御装置
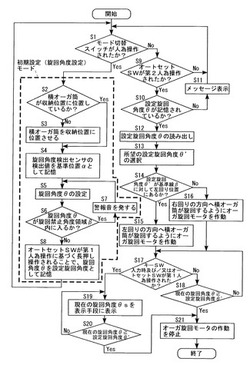
【課題】オーガ機構の所望旋回位置への移動操作を作業性良く行うことのできるオーガ制御装置を提供する
【解決手段】旋回用アクチュエータ134によってオーガ機構15を旋回軸線回りに旋回させるように構成されたコンバイン201のオーガ制御装置は、制御装置100と、オーガ機構15の旋回角度θを設定する旋回角度設定手段20と、オーガ機構15の旋回角度θsを検出する旋回角度検出手段40とを備え、制御装置100は、旋回角度設定手段20による旋回角度θを設定旋回角度として記憶し、該設定旋回角度θ及び旋回位置検出手段40による検出値θsに基づき、オーガ機構15が該設定旋回角度θに位置するように旋回用アクチュエータ134を作動させる。
(もっと読む)
籾摺選別機の集塵装置

【課題】作業環境を向上させた籾摺選別機を提供する。
【解決手段】シャッタ板を開閉させてフィード籾を籾摺部11に供給制御する籾ホッパ2と、籾摺によって得られた籾殻を機外に排出させる吸引ファン13とを備え、籾ホッパ2近傍に吸引口26を備えるものである。加えて、吸引口26は、吸引ファン13にダクト27を介して連通させ、シャッタ板の開閉と、吸引口26の開閉とを連動させる。
(もっと読む)
コンバイン
【課題】排出オーガの収納時に発生する無駄な時間を省き、速やかに作業に復帰することを可能とし、穀粒搬送作業を潤滑に進めることのできるコンバインを提供する。
【解決手段】縦排出オーガ15aと横排出オーガ15bから構成される穀粒排出オーガ15と、該穀粒排出オーガ15を旋回させる旋回装置34と、前記穀粒排出オーガ15を昇降させる昇降装置30とを備えたコンバインにおいて、前記横排出オーガ15bの旋回角度と仰角を測定するための測定手段35及び37を備え、排出位置を検知するとともに、排出位置から予め設定した機体干渉を避ける位置までの水平方向と垂直方向の距離を演算し、旋回装置34と昇降装置30を同時に駆動して機体干渉を避ける位置まで到達するように前記旋回34装置及び昇降装置30を制御した。
(もっと読む)
成分分析装置
【課題】被検体の成分を精緻に測定することのできる成分分析装置を提供する。
【解決手段】赤外線の拡散反射光C・Dから変換される測定スペクトルを調べることによって、被検体2の成分分析を行なう成分分析装置1であって、照射光を投射する投光部6と拡散反射光を検知する検知手段13との間の測定光路に、上下方向の透過孔3aを有する載置台3と、該載置台3の下方から被検体2下面へと照射光Bを投光する照射用非軸放物面鏡8と、該被検体2下面にて反射した拡散反射光Cを受光する反射用非軸放物面鏡9とを具備した。
(もっと読む)
作業車両の作業機昇降装置
【課題】リンク機構などを介することなく昇降レバーなどを運転席近傍に配置することを可能とする作業車両の作業機昇降装置を提供する。
【解決手段】作業機1を油圧シリンダ6により機体に対して昇降可能に備え、該油圧シリンダ6を伸縮操作する昇降操作手段71を運転席19近傍に配置する作業車両において、運転席19側方に設けた機体の後輪3上方を覆うフェンダー80の下部に、前記油圧シリンダ6への送油を切り換える昇降メイン切換バルブ52と油圧シリンダ6からドレンする送油量を調節する油圧バルブ60を一体的に設けた昇降バルブユニット47を配置した。
(もっと読む)
作業機
【課題】メモリを追加することなく複数の言語で情報を表示し得る作業機の提供。
【解決手段】作業機であるコンバインは、表示コントローラ110、コラムコントローラ130、エンジンコントローラ150、走行コントローラ170、脱穀コントローラ190の各コントローラと、これらを相互に接続するCAN通信バス100とを備えている。表示コントローラ110が備えるEEPROM112には、制御プログラムの他、情報を日本語により表示するための日本語表示データ、情報を画像により表示するための共通画像データを格納する。一方、他のコントローラ(130〜190)には、制御プログラムの他に他言語用の表示データを格納する。
(もっと読む)
掘削作業機のブーム
【課題】掘削作業機の作業機を構成するブームの部品コスト及び製造工数を削減する。
【解決手段】クローラー式走行装置の上部中央に左右旋回可能に支持される上部旋回体に装着した作業機のブーム15において、該ブーム15を、一体成形にて鋳造されるブーム支点部16と、ブームシリンダーロッド支点部18と、アーム支点部19と、前記ブーム支点部16と前記ブームシリンダーロッド支点部18とを連設する第一汎用角型管61と、前記ブームシリンダーロッド支点部18と前記アーム支点部19とを連設する第二汎用角型管62から構成した。
(もっと読む)
排出オーガ操作装置の配置構造
【課題】従来、グレンタンクから穀粒を取り出す排出オーガを、収納位置から排出位置に移動させるための手動操作レバー等の操作装置は、運転席の後側に配置されており、排出オーガの操作レバーがどこにあるか判らないことがあった。そこで、初心者でも排出オーガの操作レバーを容易に認識できるようにしようとする。
【解決手段】 運転席21側部にアームレスト38を備えるコンバイン1であって、グレンタンク13内の穀粒を外部に取り出す排出オーガ18を操作する手段39を、アームレスト38に回動自在に設けた。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの自動旋回に係る旋回指令手段をシンプルで操作が容易なものとし、かつ、穀粒排出オーガの自動旋回に係る誤操作を防止するコンバインを提供する。
【解決手段】穀粒排出オーガが停止する作業位置は、旋回セット操作スイッチ153を一回押す毎に、収納位置からの旋回量が最も小さい作業位置から順に大きい作業位置へ変更され、旋回セット操作スイッチ153を作業位置の数よりも一回多く押すと穀粒排出オーガ15の旋回が停止し、さらに旋回セット操作スイッチ153を一回押すと再び穀粒排出オーガ15が停止する作業位置が収納位置からの旋回量が最も小さい作業位置に変更される。
(もっと読む)
回転装置及びコンバイン用穀稈掻き込み装置
【課題】スプロケットを2つ割り構造にした穀稈掻き込み装置において、スプロケットを、軽量で強度が高くてしかも組み立てが容易な形態と成す。
【解決手段】スプロケット14は略半円状の2つのユニット23から成っており、外周板23aと側板23bとを有する断面L形に形成されている。ユニット23の一端部には、外周板23aと側板23bを板厚分だけ段落ちさせた突出部25が形成されており、一方のユニット23の突出部25と他方のユニット23の端部とを互いに重ね合わせ、その状態でボルトで掻き込みホイールに締結されている。プーリ16同士が端部において重なり合っているためリング状の形態保持性に優れており、かつ、スプロケット14(ユニット23)は断面L字形であるため軽量ながら強度が高い。
(もっと読む)
2,801 - 2,810 / 3,810
[ Back to top ]