
ヤマハ発動機株式会社により出願された特許
21 - 30 / 3,045
小型船舶
【課題】多様な機器の操作が可能であると共に、操作部材の部品点数の増加を抑えて省スペース化を図ることができる小型船舶を提供する。
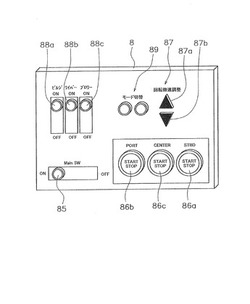
【解決手段】小型船舶は、複数の機器と、コントローラと、ディスプレイ装置とを備える。コントローラは、複数の機器を制御する。ディスプレイ装置8は、コントローラと通信を行い、タッチパネル機能を有し、機器を操作するためのソフトウェアキーを表示する。ソフトウェアキーは、メインスイッチ85と、第1始動/停止スイッチ86aと、第2始動/停止スイッチ86bと、第3始動/停止スイッチ86cとを含む。
(もっと読む)
小型船舶

【課題】本発明の課題は、航行中の船上であっても乗員同士が快適に会話することができる小型船舶を提供することにある。
【解決手段】小型船舶は、複数の機器と、コントローラとを備える。コントローラは、複数の機器を制御する。コントローラは、マイクおよびスピーカーをそれぞれ含む複数のヘッドセットと特定の無線通信規格により通信可能である。コントローラは、一つのヘッドセットのマイクに入力された音声情報を他のヘッドセットのスピーカーから出力させる。
(もっと読む)
鋳造用塩中子の製造方法
【課題】ナトリウムを含む混合塩を溶融させてダイカスト法により成形する鋳造用塩中子の実用的な強度が、より安定して得られるようにする。
【解決手段】ステップS101で、混合塩を加熱して溶湯を作製する。次に、ステップS102で、中子成形用の型を0.52×Tmより高く0.7×Tmより低い温度の範囲に加熱する。なお、Tmは、混合塩の液相線温度を絶対温度(K)で表したものである。次に、ステップS103で、上述したように加熱した型に上記溶湯を圧入する。次に、ステップS104で、型の内部で溶湯を凝固させて鋳造用塩中子を成型する。次に、ステップS105で、凝固させた鋳造用塩中子を型より取り出した直後に、120〜270℃の範囲の温度で加熱する。
(もっと読む)
リニアコンベア及びその駆動制御方法
【課題】少ないデータ収集量で精度良く搬送台車を位置決めする。
【解決手段】リニアコンベアは、複数の電磁石26を含み、電磁石26毎に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8を備える複数のスライダ4と、各電磁石26の通電制御を個別に行う複数のモータコントローラCとを備える。各モータコントローラCは、共通の測定治具を用いて予め測定された各スライダ4の移動誤差に基づいて定められた各スライダ4の位置補正用データが記憶されるデータ記憶部74を備えており、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石26への通電制御を行う。
(もっと読む)
船舶推進装置
【課題】構造を簡素化できるハイブリッド式の船舶推進装置を提供すること。
【解決手段】船舶推進装置1は、プロペラ軸線A2まわりに回転可能なプロペラ5と、プロペラ軸線A2まわりにプロペラ5を取り囲むダクト26とを含む。プロペラ5は、複数の羽根30と、プロペラ軸線A2まわりに複数の羽根30を取り囲む筒状のリム31とを含む。船舶推進装置1は、ダクト26に対してプロペラ5を回転させる内燃機関と、リム31を回転させることにより、ダクト26に対してプロペラ5を回転させる電動モータ7とを含む。
(もっと読む)
自動二輪車
【課題】エンジンユニットの出力軸を中心として揺動可能なスイングアームを備えつつ、歯付きベルトを好適に保護することができる自動二輪車を提供する。
【解決手段】自動二輪車は、出力軸と同軸の揺動軸(37、39)回りに揺動可能なスイングアーム21と、スイングアーム21に支持される後輪23と、出力軸に取り付けられるドライブプーリ51と、後輪23と一体に回転可能なドリブンプーリ61と、ドライブプーリ51およびドリブンプーリ61に巻かれる歯付きベルト65と、歯付きベルト65を保護するベルトカバー27と、を備え、スイングアーム21は歯付きベルト65と交差しており、ベルトカバー27は歯付きベルト65の一側方に位置し、歯付きベルト65と後輪23とを隔てる内壁部W1と、上壁部W2と、底壁部と、を含む。
(もっと読む)
リニアコンベア
【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
船舶推進装置
【課題】推進効率の低下を抑制でき、高トルクを出力できる電動式の船舶推進装置を提供すること。
【解決手段】船舶推進装置は、ブラケットと、ブラケットに対してステアリング軸線A1まわりに回転可能なダクト12と、ダクト12によって取り囲まれており、ダクト12に対してプロペラ軸線A2まわりに回転可能にダクト12に保持されたプロペラ6と、複数の羽根15を取り囲む筒状のリム16をダクト12に対して回転させることにより、プロペラ6を回転させる電動モータ7とを含む。
(もっと読む)
リニアモータおよびリニア搬送装置
【課題】比較的長いストローク範囲でのスライダの位置検出機能を維持しつつ、取り扱いを容易ならしめる。
【解決手段】本発明に係るリニアモータは、モータ本体部102に対し、当該移動経路に沿うX方向におけるモータ本体部102の寸法内に収まるように取り付けられたセンサ基板112A〜112Dを備えている。センサ基板112A〜112Dは、スライダ30を検出して位置検出信号を出力する位置検出手段SA1、SA2、SB1、SB2と、原点位置信号を出力する原点位置センサSZと、X方向の両側に隣接して連設された位置検出手段SA1から出力される位置検出信号と位置検出手段SA2から出力される位置検出信号、および位置検出手段SB1から出力される位置検出信号と位置検出手段SB2から出力される位置検出信号をそれぞれ足し合わせ可能な位置検出信号合算部S8とを備えている。
(もっと読む)
小型船舶
【課題】機器のネットワークシステムの配備が容易であると共に、操作性を向上させることができる小型船舶を提供する。
【解決手段】複数の機器と、中央コントローラ7と、ディスプレイ装置8とを備える。中央コントローラは、複数の機器を統合制御する。ディスプレイ装置は、タッチパネル機能を有し、中央コントローラと通信を行い、GUIによって小型船舶の情報を表示する。機器ネットワークシステムは、第1船舶推進機3aと、第2船舶推進機3bと、第3船舶推進機3cと、ステアリング装置5と、リモコン装置6と、中央コントローラ7と、ディスプレイ装置8とを含む。また、小型船舶の機器ネットワークシステムは、第1付加機能システム9と、第2付加機能システム10とを含む。
(もっと読む)
21 - 30 / 3,045
[ Back to top ]