
オプテックス株式会社により出願された特許
111 - 116 / 116
防犯センサ
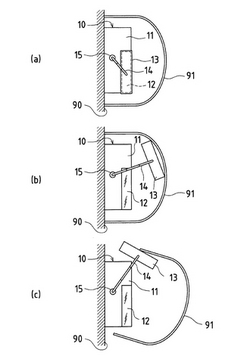
【課題】 非警戒動作時に受光窓などに対して直接的に妨害行為がなされてしまうことを防止するとともに、たとえ妨害行為がなされた場合であっても一定条件下ではその妨害行為の効果を排除して本来の機能を果たすことが可能な防犯センサを提供する。
【解決手段】 外部からの赤外線を本体11の内部の少なくとも1つの赤外線検出素子へと導く少なくとも1ヶ所の赤外線透過部12と、この赤外線透過部12を外側から覆う遮蔽位置とこの赤外線透過部を外部に露出させる非遮蔽位置との間で移動可能な少なくとも1つの遮蔽部材13と、この遮蔽部材13を遮蔽位置と非遮蔽位置の間で移動させる駆動系とを備える。
(もっと読む)
防犯用センサ装置

【課題】 外部環境の影響や設置場所の制限を受けずに、受光器の受光レベルを適正に維持できて失報や誤報を防止でき、かつ受光レベルの検出精度を向上できる防犯用センサ装置を提供する。
【解決手段】 受光レベルの時間変動に対応して受光レベルの適正範囲を変更し、受光レベルがその適正範囲から外れたときにその適正範囲に入るように投光器11からの投光量を調整するので、外部環境が変化してもこれに応じて変更させた適正範囲に受光レベルが入るようにすることから、外部環境の影響や設置場所の制限を受けることなく、装置の運転中常時、適正な受光レベルに維持でき、失報や誤報を防止できる。また、投光量の調整は、受光レベルのピーク値を下げるので、結果としてA/D変換器26のダイナミックレンジを拡大できることから、分解能が高くなって、受光レベルの検出精度を向上できる。
(もっと読む)
マイクロウエーブセンサ
【課題】 屋外設置時の近距離の草木などによる誤報を極力回避するとともに、侵入者が遠距離で監視対象領域を横切るように動いた場合などでも的確に検出することが可能なマイクロウエーブセンサを提供する。
【解決手段】 検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、この検知エリア内に存在する物体からの各マイクロ波の反射波に基づいて物体検知動作を行うマイクロウエーブセンサ1において、上記検知エリア内の物体までの「相対距離」を求める距離認識手段41と、上記検知エリア内の物体の「単位時間当たりの移動距離」を求める移動距離認識手段42と、距離認識手段41および移動距離認識手段42の出力を受け、上記検知エリア内の物体までの「相対距離」が長いほど、物体検知判定のための閾値である「単位時間当たりの移動距離値」を小さく設定して物体検知判定動作を行う物体判定手段43とを備えている。
(もっと読む)
センサ・カメラ連動型侵入検知装置
所定の設定エリア内に不法に侵入した物体Qを誤作動少なく確実に検知できるセンサ・カメラ連動型侵入検知装置を提供する。検知エリアA0〜Anからの検知線の受信量変化により物体Qを検知するセンサ部1と、カメラ2で撮影した特定エリアAC1からの映像信号MSの変化により物体Qを検知する画像処理部4と、カメラ2に接続されたモニタ画面6上で前記特定エリアAC1を設定するエリア設定部3と、前記センサ部1からの検知信号PDと画像処理部4からの検知信号MD1の両方を受けて物体検出信号DE1を発生する検出信号発生部5とを備えている。 (もっと読む)
電気機器の配線構造
【課題】 電気部品接続用のスナップ端子のリード線が引っ張られても、そのリード線の配線基板に半田付けされる基端部にストレスが掛からないように、作業性よく、かつ確実にリード線の途中部分を係止できる電気機器の配線構造を提供する。
【解決手段】 電気機器の配線基板9に設けた係止部15に、電気部品8を接続するためのスナップ端子10のリード線11の中間部が係止されるとともに、リード線11の基端部が半田付けで前記配線基板9に接続される配線構造において、前記係止部15を第1係止溝16A,16Bと第2係止溝17とで構成する。第1係止溝16A,16Bは、前記リード線11が挿通されて直交する2方向X,Yのうちの少なくとも一方向Xに沿ったリード線の移動を阻止する。第2係止溝17は、リード線11が挿通されて、少なくとも他方向Yに沿ったリード線11の移動を阻止する。
(もっと読む)
自動扉における障害物検知装置
111 - 116 / 116
[ Back to top ]