
オプテックス株式会社により出願された特許
11 - 20 / 116
通行監視装置
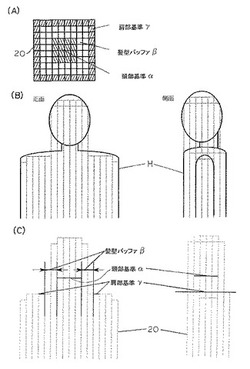
【課題】監視領域に存在する人体のような物体の数を、髪型や複数の頭部の接近状態の影響を受けることなく物体の形状を考慮して正確に判別できる通行監視装置を提供する。
【解決手段】監視領域に存在する物体Hに関する検知ブロックによる3次元の物体情報から得られたブロック投影画像に対し、頭部α、髪型バッファ部βおよび肩部γを含むブロック領域をテンプレート画像とした物体の形状のテンプレートブロック20によるテンプレートマッチングを行って、物体Hの数を判別する。
(もっと読む)
金属検出センサ

【課題】複数の金属検出センサのうちで信号の相互干渉が発生した場合に、他のセンサにその相互干渉の影響を及ぼすことなく、各共振周波数を自動的に選択して設定することができる金属検出センサを提供する。
【解決手段】周波数セット記憶手段8により検知用周波数と干渉確認用周波数を1セットとした複数の周波数セットを記憶し、相互干渉サーチ手段9により周波数セットのうちの干渉確認用周波数で順次干渉サーチを行い、相互干渉が発生しない場合に共振周波数設定手段10により車両Mの有無を検出するための電磁共振回路2の共振周波数を当該周波数セットのうちの検知用周波数とする。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
調光照明装置および調光照明システム
【課題】小型および低コストで、交通量に応じた適切な照明を可能とし、かつ高い省エネルギ効果が実現可能な調光照明装置および調光照明システムを提供する。
【解決手段】物体が通る動線上に設定されて当該動線方向に延びるライトエリアLAに向けて発光する発光手段3と、ライトエリアの一部でその動線方向と直交する方向のエリア幅分を少なくとも含むセンサエリアSA内の物体を検知して検知信号を出力する物体検知センサ1と、前記検知信号を受けて発光手段の発光を制御する制御手段5とを備え、制御手段5は、物体検知センサ1から検知信号が出力されると、その検知信号による物体検知数に応じて照度が設定される発光制御信号を生成し、この発光制御信号に基づいて発光手段3を当該照度で所定時間発光させるように制御する。
(もっと読む)
防犯照明用の調光システム
【課題】防犯目的の異なる複数の検知エリアを有する場合に、十分な防犯効果をもつとともに、小型化かつ低コスト化が実現可能な防犯照明用の調光システムを提供する。
【解決手段】照明による防犯目的を有する通常検知エリアAおよび威嚇による防犯目的を有する威嚇検知エリアBを含む複数の相異なる検知エリア内で、それぞれ人体を検知する検知センサ1、2と、通常検知エリアAに向けて発光する発光体3と、発光体3を点灯制御して複数の調光パターンに切り換える制御部5とを備え、制御部5は、通常検知エリアAに向けられた発光体3を点灯制御して、通常検知エリアA内で人体が検知されたときに通常照明用調光パターンに切り換え、威嚇検知エリアB内で人体が検知されたときに威嚇用調光パターンに切り換える。
(もっと読む)
自動ドアセンサ用の能動型物体検出装置
【課題】複数の検出エリアのうち装置から遠い位置の検出エリアであっても、検出エリアを正確に設定することができる自動ドアセンサ用の能動型物体検出装置を提供する。
【解決手段】プリズム体4P、9Pは水平な稜線Rで区画される複数のプリズム片PSを有して、検出エリアA1〜A5を遠くに拡大するように設定され、各プリズム片PSのプリズム面の鉛直面内における傾斜角度θは、水平方向の両端部で最小に、中央部に向かい次第に大きくなって中央部で当該傾斜角度が最大に設定されている。
(もっと読む)
11 - 20 / 116
[ Back to top ]