
セコム株式会社により出願された特許
81 - 90 / 596
画像監視センサ
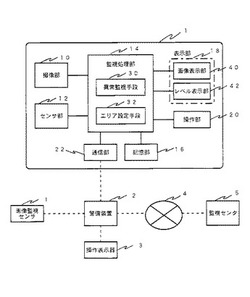
【課題】画像による撮影範囲の一部を検知範囲とする人体センサを備えた画像監視センサにおいて、画像上に対する人体センサの検知エリアの位置を精度良く特定する。
【解決手段】監視空間を撮影した画像を取得する画像取得部と、監視空間内の一部に設定された検知空間から得られる検知信号に応じて人体を検知する人体検知部とを有し、画像取得部による取得画像を表示する画像表示部と、人体の検知レベルを表示するレベル表示部と、設定者により操作され、表示画像上において所定の範囲を指定する操作部と、指定範囲を画像に対する検知エリアの位置として登録するエリア設定部と、を備えたことを特徴とする。
(もっと読む)
異常検知装置

【課題】拘束シーンのように複数人が密着して生じる異常を検知するのは困難だった。
【解決手段】互いに姿勢が異なる人物の形状を模した複数の姿勢別人物モデル211と、背景画像210とが予め記憶部21に記憶されている。撮像部20は監視空間を撮像して監視画像を出力し、変化領域抽出部220は背景画像210との比較により監視画像から変化領域を抽出し、姿勢判定部222は姿勢別人物モデル211のうち2以上を重ね合わせた複合形状を変化領域と形状比較して適合度を算出し、適合度が所定基準を超える姿勢の組み合わせを判定する。異常判定部223は姿勢判定部222により判定された姿勢の組み合わせが予め設定された異常な組み合わせと合致するときに異常信号を出力する。
(もっと読む)
警備装置および警備システム
【課題】遠隔から警備装置を警備セットモードに移行させる場合に、監視区域の内在者有無を確認できるようにして誤報可能性を低減する。
【解決手段】警備装置5の記憶部35は、少なくとも直近の過去所定時間内におけるセンサによる変化の検知の情報を記憶する。モード設定部33は、操作部37から警備セットモードの設定信号が入力されると、センサが現在異常を検知している状態でなければ警備状態を警備セットモードに設定する。また、モード設定部33は、通信部41を介して利用者端末9から警備セットモードの設定信号を受信した場合は、記憶部35に記憶された検知履歴情報に基づいて直近の過去所定時間内にセンサの検知がなければ警備状態を警備セットモードに設定する。
(もっと読む)
画像監視装置
【課題】現在表示している撮像画像上に監視部の監視範囲を再現することにより、監視者が監視場所の状況を迅速に把握しうることを目的とする。
【解決手段】撮像部と、監視部と、場所モデルと監視条件情報と撮像条件情報とを記憶した記憶部と、画像処理部と、表示部とを備えた画像監視装置であって、画像処理部は、監視条件情報と場所モデルとを用いて監視部の監視範囲を表す監視範囲モデルを生成し、監視範囲モデルと場所モデルと撮像条件情報とを用いて撮像部の視野に相当するレンダリング画像を生成し、撮像画像とレンダリング画像とを合成することにより監視部の監視範囲を表した合成画像を出力することを特徴とした。
(もっと読む)
画像監視装置
【課題】監視領域内の監視画像を処理し、監視領域内の異常状態の発生、特に強盗犯が従業員等の被害者を拘束する行為を検出する画像監視装置を提供する。
【解決手段】撮像部から順次取得された監視画像を処理して異常を判定する画像信号処理部と、画像信号処理部が異常を判定すると警報出力する警報部とを有する画像監視装置において、画像信号処理部は、背景画像と監視画像との差分2値化画像から変化領域を算出する変化領域検出手段と、変化領域として検出された差分2値化画像について床面軸に垂直方向に投影した投影ヒストグラムを求め、当該投影ヒストグラムが上に凸上の2つのピークを有する場合に異常と判定する判定手段を有する。
(もっと読む)
対象物画像判定装置
【課題】三次元空間での対象物の像の存在を判定する対象物画像判定装置において、撮像される画像毎に投影処理を行い設置物による非隠蔽部分を求めるのは処理負荷が大きい。
【解決手段】時刻毎に画像から対象物像を抽出する動作に際し事前処理を行い、空間内での対象物の位置のうち画像において対象物が設置物により隠蔽される隠蔽位置を特定した隠蔽マップ42、カメラへの投影条件に基づいて設置物、及び空間内の各位置での対象物それぞれの立体モデルを投影した設置物モデル像44、対象物モデル像43を求め、記憶部4に格納する。隠蔽状態推定部54は、隠蔽マップ42を参照し、対象物の候補位置が隠蔽位置であれば当該候補位置に対応する対象物モデル像43から設置物モデル像44の領域を除いて対象物可視領域とする。尤度算出部55及び物体位置算出部56は、画像における対象物可視領域の画像特徴から対象物の像の存在を判定する。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、移動物体の現時刻での予測位置が監視空間内の障害物の領域に設定されると追跡精度が劣化する。
【解決手段】予測位置設定部は記憶部に記憶される過去の位置情報を用いて動き予測を行い、移動物体の現時刻における複数の予測位置を求める。その際、予測位置修正部53は、複数の予測位置のうちその移動元となる1時刻前の予測位置220との間に障害領域42aが存在する予測位置221を移動元位置から見て障害領域42aより手前の位置の予測位置241に修正する。物体位置算出部56は、修正された予測位置を含む複数の予測位置それぞれにて有する移動物体の画像特徴に基づいて、移動物体の現時刻における移動先位置を判定する。
(もっと読む)
侵入物体検出装置
【課題】監視画像上の、熱変化に基づいて侵入物体を検知する検知エリアを表す領域を高精度に特定して、侵入物体の検出精度を向上できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置1は、検知エリアからの熱線に応じた検知レベルを出力するセンサ部20と、監視画像を取得する撮像部10と、変化領域を抽出する変化領域抽出手段71と、検知レベルが所定値になったときの監視画像から抽出された変化領域の位置を人像位置として抽出する人像位置抽出手段73と、所定期間に抽出された複数の人像位置に基づいて、人の移動範囲の端部を監視画像上で検出し、その端部に基づいてセンサ領域を特定するエリア特定手段74と、変化領域がセンサ領域またはセンサ領域外のいずれに存在するかに応じて異なる異常判定処理を実行する異常監視手段75を有する。
(もっと読む)
複合型センサ
【課題】画像センサとその監視空間の一部を検知空間とする人体センサとを備え、両センサの検知結果を統合判定して侵入異常を検知する複合型センサにおいて、両センサの検知エリアの位置関係が正確でないと異常判定の精度が低下する。
【解決手段】監視空間内でのウォークテストを行い、画像内での人像の位置に対応した人体センサの検知信号レベルの特性150を測定する。当該特性150に基づいて、検知信号が人体検知の基準レベルZ1以上である人像位置を包含する検知位置分布範囲Roを抽出する。Z1より低い人体検知の許容レベルZ2を設定し、範囲Roの両側の距離Bの範囲に存在するZ2以上である人像位置を包含するように、範囲Roを拡張補正した補正分布範囲Reを求める。この範囲Reが中心となるように人体センサ及び画像センサの検知エリアの共通部分である複合検知エリアを設定し、画像の残りを画像センサ単独の検知エリアと定める。
(もっと読む)
画像監視センサ
【課題】画像による監視空間の一部を検知空間とする人体センサを備えた画像監視装置において、画像上に表示する人体センサの検知エリアを精度良く特定する。
【解決手段】監視空間内での作業員が移動してウォークテストを行い、測定タイミングにおける画像内での人像の位置とセンサ部の検知信号の信号レベルとを対応付けた測定データを取得する。測定データにより与えられる特性150において、ピーク値Pmaxに対応する測定データを代表点として選択し、その人像位置Xpを作業員の移動速度に応じて補正して補正ピーク位置Xpcを求める。この補正ピーク位置Xpcが中心となるように検知エリアを設定する。
(もっと読む)
81 - 90 / 596
[ Back to top ]