
トーヨーコーケン株式会社により出願された特許
1 - 10 / 19
荷役作業支援装置
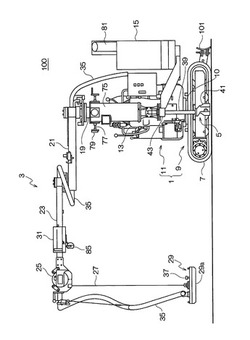
【課題】大きさが制限される空間内で作業員による荷役作業を機械化により支援し、作業員の負担を軽減するとともに作業時間の短縮化を図る荷役作業支援装置を提供すること。
【解決手段】走行台車9に支持された荷役作業補助手段3とアウトリガー5を備え、走行台車9は走行する台車9上に回転可能に支持された運転台11を備える。荷役作業補助手段3は運転台に鉛直に支持された支軸19の周りに回転自在に支持された第1のアーム21、該アームの先端部に支軸と平行な軸周りに回転自在に支持された第2のアーム23、第2のアームの先に取り付けられたホイスト25の巻取部からワイヤ27で吊り下げて荷物を吸着する吸着具29、ホイストの巻取部を回転させて荷物を任意高さに保持する制御手段を備える。アウトリガー5は鉛直方向に移動可能な軸部39が運転台の回転軸中心から走行台車の外側縁よりも外側に取り付けられる。
(もっと読む)
タンク

【課題】高さ規制を解決し、景観性にも優れたタンクを提供する。
【解決手段】貯留物を貯留するタンク本体と、該タンク本体の上部に設けられ、所定の開口が形成された屋根2Bと、上記開口からタンク本体内に垂直状態に設けられるポンプバレル3a〜3eと、該ポンプバレル3a〜3eの内部に収容され、タンク本体内の貯留物を汲み上げるポンプ4と、上記開口を介してポンプ4を吊具で吊り上げてポンプバレル3a〜3eから取り出すあるいは/及びポンプバレル3a〜3eに収容するためのクレーン5と、を備え、クレーン5は起伏角が可変自在な起伏式クレーンである。
(もっと読む)
荷役機械及び荷役機械の制御方法
【課題】低コストでバランスモード時の操作力を確実に軽減することができる荷役機械を提供する。
【解決手段】バランスモードに設定可能なエアー式の荷役機械1であって、上下方向及び水平方向に移動自在に構成され、所定の荷役物10を保持する把持機構8を有する昇降機構5と、昇降機構5をエアーの圧力によって上下方向に駆動するエアーシリンダ20と、エアー源21から供給されるエアーの圧力を所定の圧力に調整してエアーシリンダ20に供給する圧力比例制御弁22と、昇降機構5の上下方向の加速度を検出する加速度センサ11とを備える。バランスモードにおいて、加速度センサ11にて得られた荷役物10の加速度情報及びエアーシリンダ20内の圧力情報に基づいて、エアーシリンダ20に対する圧力比例制御弁22の出力エアー圧力を調整するように構成されている。
(もっと読む)
無線式巻上機及びその制御方法
【課題】無線操作ペンダントを使用した巻上機において、巻上機本体に異常が発生した場合、作業者に巻上機本体の状態を正確に知らしめ、適切かつ迅速な対応処置を取らせることを可能にする。
【解決手段】本発明の無線式巻上機1は、所定の荷を保持して巻き上げ、かつ、巻き降ろすための巻上機構50と、巻上機構50を駆動するモータ54と、モータ54の動作を制御する制御回路58と、巻上機本体5の動作状態を検出する状態検出手段とを有する巻上機本体5と、作業者による巻上機構50に対する動作指令を与えるための無線操作ペンダント2とを備える。巻上機本体5と無線操作ペンダント2に、無線データの送受信が可能な無線送受信回路61、31が設けられ、無線操作ペンダント2において、巻上機本体5の状態検出手段にて得られ無線操作ペンダント2に無線送信された巻上機本体5の状態を表示する。
(もっと読む)
荷役機械及びその制御方法
【課題】重量が未知である荷役物に対し無負荷バランス状態から負荷バランス状態への移行を短時間で且つ安定して行いうる荷役機械を提供する。
【解決手段】本発明の荷役機械は、クランプ機構8によって荷役物7を保持して昇降させるアーム4と、空気式シリンダ20と、エアー流量制御部23及び圧力比例制御部22とを有する。空気式シリンダ20の圧力を検出するエアー圧力センサ26と、クランプ機構8の動作加速度を検出する加速度センサ27と、エアー流量制御部23及び圧力比例制御部22の動作を制御する制御回路24とを備え、加速度センサ27にて得られた結果に基づき、エアー圧力センサ26によって空気式シリンダ20におけるエアーの圧力を検出する一方、エアー圧力センサ26にて得られた結果に基づき、圧力比例制御部22の空気式シリンダ20に対するエアーの圧力を負荷バランス圧として設定する。
(もっと読む)
ホイスト制御装置及び揚重設備
【課題】防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供する。
【解決手段】本発明は、二台のホイストの各減速機の出力軸に固定されその回転反力によってロープ繰出し方向へのみ回転動作する第1及び第2のトルクアームと、各トルクアームの回転力を伝達する第1及び第2の油圧機構と、ガイド棒24、25、34、35に沿って移動自在で第1及び第2の入力側シリンダ23A、23Bからの伝達力と所定のばね力に抗して移動する第1及び第2の駆動部材26、36と、各駆動部材26、36の動作でオン/オフが切換可能な第1〜第3のリミットスイッチ31〜33とを備え、各リミットスイッチ31〜33にて得られた結果に基づいて原動機の動作を制御する。
(もっと読む)
荷役機械
【課題】低コストで飛び跳ね動作の検出精度が高く、さらに種々の荷役機械に柔軟に取り付け可能な飛び跳ね対策技術を提供する。
【解決手段】本発明の荷役機械1は、上下方向に移動自在に構成され荷役物7をクランプ機構8によって保持して昇降させるアーム4を有する昇降機構5と、エアー源22から供給されるエアーの圧力によって昇降機構5を駆動するシリンダ20とを有し、シリンダ20に対して給排気するエアーの流量及び圧力を操作ボックス9からの命令に基づき圧力比例制御弁21を用いて制御する荷役機械である。アーム4先端部の動作加速度を検出するMEMS技術による加速度センサ30が設けられ、加速度センサ30にて得られた結果に基づき、電子制御回路25から圧力比例制御弁21への命令によってシリンダ20に対するエアーの流量及び圧力を制御する。
(もっと読む)
荷役装置
【課題】簡単なペアリング作業で、荷役装置本体と無線操作ペンダントを一対一に対応付ける。
【解決手段】ペアリング作業の際、無線操作ペンダントは、特別な押下ボタンデータを含む操作データ15を送信した後、受信モードに移行させ、他方、その操作データ15を受信した荷役装置本体のうち、有効なペアリング作業が行なわれた荷役装置本体には、操作データ15に含まれるペンダントID番号を有効に記憶させ、返信データ16を送信させる。この返信データ16を受信した無線操作ペンダントは、操作データ15中に含まれるペンダントID番号と、当該無線操作ペンダント固有のペンダントID番号を比較し、一致していた場合には、操作データ15中に含まれる荷役装置ID番号を記憶し、受信モードを解除する。
(もっと読む)
三次元空間搬送装置及び三次元空間搬送方法
【課題】少ない操作ボタンでオペレータに東西南北上下の6方向を意識させないで搬送装置を操作することができる三次元搬送装置を提供する。
【解決手段】本発明は、搬送対象物を保持して三次元空間において搬送する保持搬送部を有する装置本体部を備え、操作部からの命令に基づいて保持搬送部を三次元空間内において移動させる三次元空間搬送装置である。装置本体部に、保持搬送部をそれぞれ独立してX、Y、Z軸方向へ移動させるための三つのモータ21〜23が設けられるとともに、操作ペンダント9に、操作部本体の位置情報及び傾斜情報を検出するための3軸式の電子コンパスセンサー回路11と、装置本体部の三つのモータ21〜23を動作させるための少なくとも一つの操作スイッチとが設けられ、電子コンパスセンサー回路11にて検出された情報に基づいて三つのモータ21〜23を動作させるように構成されている。
(もっと読む)
荷役装置
【課題】簡易な操作でペアリング作業が可能な荷役装置を提供する。
【解決手段】本発明の荷役装置は荷役装置本体1と、無線操作ペンダント2、3とを有している。無線操作ペンダント2、3は押下ボタンデータと、記憶されたID番号とを一緒に操作データとして無線送信し、荷役装置本体1は電源が投入された後、最初に受信した操作データ中に、予め設定された二個のボタンが押下されたことを示す押下ボタンデータが含まれている場合に、当該最初に受信した操作データ中のID番号を、仮記憶領域に記憶するようになっている。
(もっと読む)
1 - 10 / 19
[ Back to top ]