
トピー工業株式会社により出願された特許
111 - 120 / 255
車両用ホイール
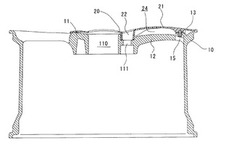
【課題】樹脂製の加飾部材を用いて、あたかもスポーク部の中間部に空間が形成されているような立体的な意匠を形成する。
【解決手段】ホイール本体1に樹脂製の加飾部材2を保持した車両用ホイールであって、加飾部材2のスポーク被覆部21とスポーク部12との間に、ホイール本体1の軸方向外側から視認可能な空間24を形成した。
あたかもスポーク部の中間部に空間が形成されているような立体的な意匠を、スポーク部を加工することなく実現することができる。
(もっと読む)
ドア開き用ロボットハンドおよびロボット

【課題】 簡単な構造でドアを開くことができるロボットハンドを提供する。
【解決手段】
ロボットハンド1は、ノブ101付きのドア100を開くために用いられる。このロボットハンド1は、ハンド本体と、ハンド本体に回転可能に支持され、外周面がノブ101の外周面に当てられる回転体20と、回転体20をノブ101に当てた状態で回転させることにより、ノブ101を、ドア100のラッチ状態を解除する方向に回転させるモータを備えている。さらにロボットハンド1は、回転体20の外周面から径方向、外方向に突出するようにしてハンド本体の先端に設けられた係止爪41を有している。この係止爪41は、回転体20が上記ノブ101に当たっている状態で、ノブ101とドア100との間に挿入され、ノブ101の裏面に係止される。上記ラッチ解除後に、係止爪41がノブ101に係止された状態でロボットハンド1を後退させることにより、ドア100を開くことができる。
(もっと読む)
軸力管理ナットアッセンブリ
【課題】 ボルト軸力管理の精度をあげることができる軸力管理ナットアッセンブリの提供。
【解決手段】座部材11と、締め付けナット12と、リングアッセンブリ13と、
を備え、リングアッセンブリ13は、弾性変形リング20と、適正軸力管理リング21と、過剰軸力管理リング22とを含み、過剰軸力管理リング22が弾性変形リング20と適正軸力管理リング21との間に配置されている、軸力管理ナットアッセンブリ10。適正軸力管理リング21が折り曲げ部21を有し、折り曲げ部21の、適正軸力管理リングの過剰軸力管理リングとの接触面からの高さH1は、過剰軸力管理リング22の高さH2より大である。過剰軸力管理リング22が周方向に1カ所切れ目のあるワイヤリングからなる。軸力管理ナットアッセンブリ10が連結部材14を有してもよい。
(もっと読む)
距離測定装置および走行体位置検出システム
【課題】 床下点検システム等に用いられるロボットの位置検出を正確に行えるようにする。
【解決手段】
ロボット10は、遠隔制御される走行体11と、走行体11に回動可能に搭載されたカメラアッセンブリ30を備えている。このカメラアッセンブリ30のカメラ34は水平方向と上下方向に回動できる。カメラ34には超音波距離計40が設けられており、カメラ34と一緒に回動できるようになっている。床下空間において、上記超音波距離計40が上下方向に回動され、上下回動範囲での計測距離の最大値が、布基礎壁面100aまでの実際の距離として決定される。さらに、超音波距離計40の水平回動に伴って求めた複数方向での布基礎壁面100aまでの実際の距離に基づき、ロボット10の現在位置を演算する。
(もっと読む)
圧縮成形体の製造方法および装置
【課題】 生産性を大幅に向上させることができる圧縮成形体の製造方法および装置を提供する。
【解決手段】
本体10は、加工部11と段取り部12とを連設してなり、その連設方向に延びるガイド穴14aを有している。このガイド穴14aに型20がスライド可能に収容されている。型20は、加工部11と段取り部12の連設方向と直交する平面上において、互いに90°間隔で交差する4つの直線状の成形穴21〜24を有している。型20は、油圧シリンダ29により、加工部11に対応する加工位置と段取り部12に対応する段取り位置との間で直線的に移動される。加工位置にある型20の成形穴21〜24には、それぞれ押圧部材31〜34が挿入され、油圧シリンダ35により押圧部材31〜34の前進、後退動作を行うことにより、マグネシウム合金等の原料を微細化し、最終的に圧縮成形体を得る。上記加工により圧縮成形体を成形した後、型20は段取り位置まで移動され、圧縮成形体の排出が行われる。
(もっと読む)
車両用ホイール
【課題】ホイール本体を減肉することなく加飾部材を配置することで、強度を維持しつつ意匠の自由度を高める。
【解決手段】外側部材20と内側部材21とからなる樹脂製の加飾部材2をホイール本体1に固定し、外側部材20と内側部材21との間には、ホイール本体1の軸方向外側から視認可能な空間25を形成した。
スポーク部を減肉することなく強度を高く維持しつつ、立体感の大きな特有の意匠を発現することができる。
(もっと読む)
車両用ホイール
【課題】加飾部材の組付け工数を大幅に低減する。
【解決手段】第1係止部と、第1係止部の係止方向とは異なる方向で係止される第2係止部と、の少なくとも二つの係止部で加飾部材2をホイール本体に1に保持した。
ホイール本体の表面側を下方にひっくり返しても加飾部材2が抜け落ちないので、加飾部材2を手で保持しておく必要なく組付作業を行うことができる。
(もっと読む)
ロボット位置検出システム
【課題】 床下点検システム等に用いられるロボット位置検出システムにおいて、位置検出の演算速度を向上させる。
【解決手段】
位置検出システムのロボット10は、走行体11と、走行体11に回動可能に搭載されたカメラ12と、ロボットと水平方向に対峙する固定対象物までの距離を複数方向で測定する距離計13とを有している。遠隔制御装置20のディスプレイ22は、カメラ12からの映像を表示し、かつ固定対象物の位置情報を含むマップデータに基づいてマップを表示する。遠隔制御装置20のパソコン21は、ディスプレイ22に表示されたマップにおいて、探査エリアを指定するとともに、ロボットの現在位置が探査エリアにあるとの条件で、距離計13からの複数方向の測定距離情報と上記マップデータに基づき、現在のロボット位置を演算し、このロボット位置をディスプレイ22に表示させる。
(もっと読む)
ホイールのランフラット装置及びその押力維持機構
【課題】車両のホイールのランフラット用中子がクリープした場合でも中子への押力を確
実に維持できるようにする。
【解決手段】ホイールWにランフラット用の中子10を設け、これにバンド20を巻き付
ける。中子10には、押力維持機構13を収容しておく。押力維持機構13は、ホイール
Wの径方向に積層された複数の皿ばね41,41…からなる付勢手段40を含んでいる。
この付勢手段40が、中子10を半径内側方向へ付勢している。
(もっと読む)
ケーブルシステム
【課題】ケーブルのたるみを防止し、ケーブルの巻き取り、繰り出しを円滑に行うリール装置付きケーブルシステムを提供。
【解決手段】探査装置と基地装置とをケーブルで接続し、ケーブルのリール装置4とを装備し、リール装置4は、リール11と、リール11に連結されたモータ15と、リール11の回転方向と回転速度を検出する回転検出手段16と、モータ15のコイル電流を検出する電流検出手段17aと、モータ制御手段18と、加速度センサ19を備え、モータ制御手段18は、リール11が繰り出し時には第1制御モードを実行し、モータフリーにし、リール11が停止または巻取り時には第2制御モードを実行し、電流検出手段17aにより検出される電流が設定電流になるようにモータ15を制御し、これら制御モードを加速度センサ19からの加速度情報に基づいて補正する。
(もっと読む)
111 - 120 / 255
[ Back to top ]