
株式会社キトーにより出願された特許
1 - 10 / 101
チェーン連結用リンク
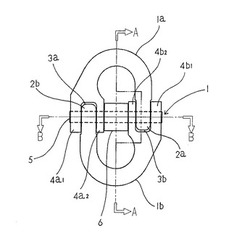
【課題】チェーン連結用リンクの連結用腕部の外周に磨耗や傷等による変形の発生を防止し、連結用リンクの連結用腕部の強度向上、特に疲労強度向上を実現できる連結リンクを提供する。
【解決手段】一対のU型リンク1a、1bからなり、U型リンクの一方の端部に連結用腕部2a、2bを、他方の端部に溝形状部3a、3bを有する連結用溝形腕部4a1,4a2、4b1,4b2を設け、一方のU型リンクの連結用腕部2aまたは2bを他方の連結用溝形腕部4a1,4a2または4b1,4b2に嵌装し、腕部2a、2b、4a1,4a2、4b1,4b2に設けた貫通孔に連結軸5を貫通して前記一対のU型リンクを連結するチェーン連結用リンクであって、前記連結用溝形腕部4a1,4a2、4b1,4b2の外径を前記連結用腕部2a、2bの外径より大きく設定し、前記連結用腕部2a、2bと障害物等との接触または衝突を防止するようにしたことを特徴とする。
(もっと読む)
可変速巻上機

【課題】電動機にプルロータ式のブレーキを備えた電動機を用い、該電動機に過電圧印加開始時の出力周波数を下げることなく、加速度時間が短い電気チェーンブロック等の可変速巻上機でも運転開始時にプルロータ式のブレーキを確実に開放できる電流を通電できる可変速巻上機を提供する。
【解決手段】プルロータ式のブレーキを備えた電動機と、インバータとを備えた、電動機の速度を緩起動制御する可変速巻上機において、インバータを所定の電圧−周波数(V−F)パターンで運転するように設定し、電動機を起動するときには、周波数がf1からf2に達するまでの加速度(出力周波数増加率)を、周波数がf2からf3に達するまでの加速度(出力周波数増加率)よりも小さくし、プルロータ式ブレーキを開放できる十分な電力を通電する。
(もっと読む)
負荷感応型磁気クラッチ装置
【課題】負荷感応型磁気クラッチにおいて、クラッチ部に加わる負荷の変動によりクラッチの負荷トルク伝達経路が高負荷伝達経路から低負荷伝達経路に切換わるクラッチ戻りの発生を防止できる負荷感応型磁気クラッチ装置を提供する。
【解決手段】負荷感応型磁気クラッチ装置の磁極14aの側方にクラッチ突起16を備え、出力回転手段17を形成する磁極回転体14と、磁極回転体14と磁気吸引力によりトルクを伝達する歯形磁性体12aを備え、低トルク入力手段11を形成する継鉄回転体12と、出力回転手段17に設けられたクラッチ突起16と係合するクラッチ係合部3を有する高トルク入力手段2の、クラッチ突起16は磁性体からなり、クラッチ係合部3はクラッチ突起16が磁力によって吸着するクラッチ保持磁性体を有し、クラッチ保持磁性体は吸着したクラッチ突起16をクラッチ係合部の深部に誘導するクラッチ突起誘導部を有した構成とした。
(もっと読む)
無励磁作動ブレーキを備えた巻上機
【課題】ボルト、支点軸等の操作手段の取着手段を設けず、極めて簡単な構成のブレーキ解放装置を提供する。
【解決手段】電磁ブレーキを包囲する電磁ブレーキカバー18のブレーキ板20の上部及び下部に対応する位置に、電磁ブレーキのアーマチュア22と受圧板21間に上下方向から差込まれる第1及び第2操作レバー26,27の差込口18a、18bをそれぞれ設け、前記第2操作レバー27は、前記差込口18bに下方から挿嵌され、アーマチュア22と受圧板21間に差込まれる差込部27aと、前記差込部27aから水平方向に折曲する操作部27bを有する無励磁作動電磁ブレーキを備えた巻上機。
(もっと読む)
電気チェーンブロックの荷重判別装置、及び荷重判別方法
【課題】電気チェーンブロックのトルク電流から、巻上運転開始後短時間で、且つ精度良く荷重の判別ができる電気チェーンブロックの荷重判別装置、及び荷重判別方法を提供すること。
【解決手段】巻上下電動機12、インバータ制御装置11を備え、巻上下電動機12によりシーブ15を回動させ、該シーブ15に係合するチェーン16を巻上下する電気チェーンブロックの荷重判別装置であって、インバータ制御装置11から巻上下電動機12に供給されるモータ電流を検出する電流検出素子21と、荷重判別部20を備え、該荷重判別部20で検出したモータ電流からトルク電流、トルク電流の変動周期、変動周期間の平均トルク電流値、移動平均トルク電流値を設定閾値と比較して荷重判定を行う。
(もっと読む)
巻上機
【課題】簡単な構成で内蔵しているインバータが発する熱や回生制動用抵抗器が発する熱を効率良く外気に放熱でき、高頻度運転が可能な巻上機を提供すること。
【解決手段】荷昇降用電動機41、減速機構、回生制動用抵抗器70を具備し、荷昇降用電動機41を巻上機本体に内蔵するインバータ12で駆動すると共に、吊り荷の下降時荷昇降用電動機41で発電した電流を回生制動用抵抗器70に流し、回生制動をかける巻上機において、インバータ12を減速機構ケーシング15に面接触で密接させて取付け、該インバータ12で発生した熱を減速機構ケーシング15に放熱する。
(もっと読む)
荷役機械の操作制御装置
【課題】駆動モータにサーボモータ等の位置制御可能モータを使用し、荷の移動量や位置決めをパルス制御により高精度で行う荷役機械の操作制御装置を提供すること。
【解決手段】位置制御可能な駆動モータ(サーボモータSM)と、該駆動モータを駆動する駆動アンプ(サーボアンプ3)と、コントローラ(2)と、操作装置を備え、操作装置は手動パルス発生器(12)又はパルス発生器の発生パルス数を操作する手動操作部と、デマンドスイッチ(23)を備え、コントローラはデマンドスイッチがON状態にある間は手動パルス発生器又は手動操作部で操作されるパルス発生器からのパルス信号を有効として駆動アンプに入力し、駆動アンプは入力されたパルス信号数に比例した速度と移動量になるように駆動モータを駆動する。
(もっと読む)
昇降用ガイドレール装置
【課題】従来の昇降用ガイドレール装置は、構造が複雑で昇降体より可動ポストの長さが長いと、スライドレール下端を昇降ガイドレール下端まで上昇させるには、昇降体をその分さらに昇降させる必要があるという課題を有していた。
【解決手段】本発明は、クレーン等の昇降装置から垂設された固定レール7と、固定レール7に沿って昇降するスライドレール9と、スライドレール9にガイドされ昇降する昇降体4を備え、前記固定レール7には昇降体の昇降方向に、スライドレール9の昇降ガイド部に沿って固定カム8を配設し、前記昇降体4にはスライドレール9の昇降ガイド部に沿って昇降カム5を配設し、前記スライドレール9には前記昇降カム5と摺接及び係合保持される昇降カム摺接部11aと、前記固定カム8と摺接及び係合保持される固定カム摺接部11bを有するカム摺接リンク10を枢着し、前記昇降体4の昇降動作に連動してカム摺接リンク10を介してスライドレール9を昇降することを特徴とする。
(もっと読む)
電動巻上横行装置用電源装置
【課題】部品点数を増やすことなく、電源投入後蓄電デバイスへの初期充電待ち時間なしに直に昇降・横行運転ができ、昇降用電動機、横行用電動機の回生時には発電する回生電力を蓄電デバイスに蓄電でき、力行時にはこの蓄電した力を昇降用電動機、横行用電動機に供給できる省エネルギー型の電動巻上横行装置用電源装置を提供すること。
【解決手段】交流電源19の投入時、蓄電デバイス18の蓄電量がゼロ又は放電により少なくなっている場合横行制動用開閉素子17及び初期充電用抵抗器16を介して昇降用電動機M2及び横行用電動機M1の回生電力により初期充電を行い、横行制動用開閉素子17の満充電後は充放電用開閉接点32を閉じて力行・回生時に蓄電デバイス18の放電・充電を行い、更に蓄電デバイス18が過充電になるときは昇降制動用開閉素子27を介して回生電力電流を昇降制動用抵抗器29に通電し、発熱消費させる。
(もっと読む)
高強度、高靭性リンクチェーンとその製造方法
【課題】リンクチェーンの高強度化、特殊環境下或いは屋外環境下における突発的な破壊を防止するリンクチェーンの耐遅れ破壊向上、更に寒冷地などの低温環境下における脆性破壊を防止できる高強度、高靭性リンクチェーンとその製造方法を提供する。
【解決手段】質量%で、C:0.15〜0.8%,Si:0.2〜2.0%,Mn:0.6〜2.5%,Al:0〜0.005%,P:0.05%以下、S:0.05%以下,Cr:0.4〜2.0%,Mo:0.5%以下,B:0.0005〜0.005%を含み、残部Fe及び不可避的不純物からなり、鋼組織として鋼中に、体積率で、残留オーステナイトを5〜15%、ベイニティックフェライトとポリゴナルフェライトを10%以下、炭素濃化処理マルテンサイトを90%以上を含み、動的靭性値が80J/cm2以上、静的靭性値が120MPa−m1/2以上を有する高強度、高靭性リンクチェーン。
(もっと読む)
1 - 10 / 101
[ Back to top ]