
株式会社小野測器により出願された特許
21 - 30 / 230
容積式流量計
【課題】 本発明は、1サイクルごとに一定量の流体を流し出す計量子を繰り返し動作させて流量を計測する容積式流量計に関し、流量計測誤差を小さく抑える。
【解決手段】 流路内で動作を循環的に繰り返し流入してきた流体を1サイクルの動作ごとに一定量だけ流出させる計量子と、その計量子に流入する流体とその計量子から流出する流体との差圧を検出する差圧検出器と、計量子の動作に応じた信号を出力する動作検出器と、計量子の動作を補助するモータと、動作検出器の出力信号に基づいて、差圧検出器の応答周波数を越える周波数成分を含む波形を生成する波形生成部と、差圧検出器で検出された差圧と波形生成部で生成された波形との双方に基づいて、計量子に流入する流体と計量子から流出する流体との差圧がゼロになるようにモータの動作を制御する動作制御部とを有する。
(もっと読む)
液体サンプル容器

【課題】細管ノズルから流出した液体の揮発を軽減する液体サンプル容器を提供すること。
【解決手段】液体サンプル容器10は、容器部510の入口に固定された筒状部501と、筒状部501の内側に固定され、液体が一方向に流れるように形成された当て板502とを備える。そして、細管ノズル201から流出した液体は、当て板502を一方向に流れ、当て板502の先から滴下し、筒状部501の下端5011と容器部510の底5101との間の所定の隙間から容器部510に溜まる。
(もっと読む)
流量計校正装置
【課題】小流量域での流量を測定する流量計を正確に校正することができる流量計校正装置を提供すること。
【解決手段】流量計校正装置10において、ダイバータ100は、管路505を流れた液体が流出するノズル200と、秤量容器300との間に設置され、円板状の面101に所定形状の開口部102を有し、ノズル200から流出したノズルからの流れ90と円板状の面101との角度が、所定の角度に設置されている。そして、制御部410は、アクチュエータ103を介して円板状の面101を回転させて開口部102を移動させ、秤量容器300へのノズルからの流れ90の流入を制御する。さらに、ノズル200の先に、流量が一定の値より小さい場合に連続で流れる層流95を形成する細管ノズル201を備え、円板状の面101に当たった液体が流れて開口部102から秤量容器300に流入しないように、開口部102に遮蔽板を備える。
(もっと読む)
揮発量測定装置及び方法
【課題】ノズルから流出して秤量容器に流入する、小流量域での液体の揮発量を精度よく測定する揮発量測定装置及び方法を提供すること。
【解決手段】揮発量測定装置10は、ノズル200の先に、流量が一定の値より小さい場合に連続で流れる層流95を形成する細管ノズル201と、細管ノズル201の先端と秤量容器300の底との相対的な距離を変更する移動装置301と、移動装置301によって距離の変更を制御する制御部410と、を備える。そして、揮発量測定装置10は、秤量容器300に流入する液体の重量を秤量計400によって測定した第1の測定による重量と、細管ノズル201の先端と秤量容器300の底との相対的な距離を変更した第2の測定による重量と、の差を算出する。
(もっと読む)
ダイバータ評価装置
【課題】小流量域でのダイバータタイミングエラーの評価を精度よく行うことができるダイバータ評価装置を提供すること。
【解決手段】ダイバータ評価装置10は、管路505を流れてきた液体が流出するノズル200の先に設置された、流量が一定の値より小さい場合に連続で流れる層流95を形成する細管ノズル201を備える。そして、ダイバータ評価装置10は、ダイバータの切り替えによって秤量容器300に流入した液体の重量を秤量計400によって測定し、測定した一定時間の液体の重量と、一定時間を所定の回数で分割して測定した各々の重量の総和とを比較して、ダイバータタイミングエラーを評価する。
(もっと読む)
液体加圧容器
【課題】加圧気体を溶け込ませず、かつ、液体内から発生する気泡を溜めない液体加圧容器を提供すること。
【解決手段】液体加圧容器10は、液体と気体の境界面に浮かぶフロート20を備え、フロートの周縁21と、容器11の内壁111との隙間12の範囲は、加圧部30の減圧によって液体に溶け込んだ気体から発生した気泡、又は外部から混入した気泡が抜ける隙間12以上であり、加圧部30の加圧によって気体が液体に溶け込む量が所定の量の隙間12以下である。さらに、フロート20の底面22は円錐形状である。
(もっと読む)
光学式ロータリエンコーダ
【課題】シャフトをディスクの片方側だけでベアリングによって支持する光学式ロータリエンコーダの、回転系の部材の非回転方向の剛性を確保する。
【解決手段】一端に回転スリットが形成されたディスク6が固定されたシャフト3を、ディスク6の片方側で軸支する二つのベアリング5を設ける。そして、シャフト3の直径をd、ディスク6の回転スリットの直径をD、二つのベアリング5の軸方向の中央位置からの回転スリットまでの距離をLとし、K1≦2.1、望ましくはK1≦1.85、として、L/d≦K1を満たし、K2≦3.0、望ましくはK2≦2.7として、D/d≦K2を満たすように光学式ロータリエンコーダを構成する。
(もっと読む)
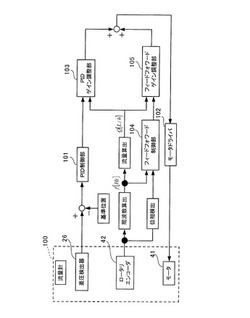
ダイナモメータ
【課題】ダイナモメータの出力トルクの制御特性を容易に設定可能とする。
【解決手段】減算器32は、目標トルクFtrg(N)と検出トルクFo(N)の差分ΔF(N)を算出し、PID制御器33は、差分ΔF(N)に基づいて、PID制御を行い、モータ23の出力トルクFo(N)の制御値、すなわち、モータ23に出力させるトルクを表す制御値であるトルク制御値Fcnt(N)を出力する。ダイナミックスケーリング部34は、モータ23の出力トルクFoをトルク制御値Fcnt(N)と等しい値とするための、電流指令値ACR(%)を、回転速度計29の出力する回転速度Rvと、モータ23とモータ23を電流指令値ACR(%)に従ってACR制御するインバータ20との組の出力特性が記述されているスケーリングマップ35を参照して算出し、インバータ20に出力する。
(もっと読む)
制御装置
【課題】 本発明は、例えばモータに自動車のエンジンの動作を模擬させたシステムにおけるモータの制御等、制御対象物の制御を行なう制御装置に関し、制御系の遅れ時間を高精度に補償した制御を行なう。
【解決手段】 制御対象物の動作速度を第1の角度に変換し、制御系の遅れ時間に相当する時間をその動作速度に応じた第2の角度に変換し、第1の角度と第2の角度とを加算して第3の角度を生成し、その第3の角度を、その制御対象物の制御対象要素を指令値通りに制御するための指令値に変換して、その指令値に基づいて制御対象物を制御する。
(もっと読む)
ダイナモメータの特性マップ作成方法及びダイナモメータ
【課題】ダイナモメータの出力特性を表す特性マップを、容易かつ適正に算出可能とする。
【解決手段】電流指令値ACR(%)とモータ出力トルクFoとモータ回転速度Rv の計測データ(a)から、電流指令値ACR(%)毎に、最小二乗法により、y=Fo、x=Rvとして、n次元近似曲線y=H(x)を算出する(b)。次に、予め定めた回転速度Rv複数のサンプルポイントRvjの各々について、n次元近似曲線上の代表点Pj=(Rvj、H(Rvj))を算出し(c)、代表点Pjを直線で結んだ曲線を求め(d)、求めた曲線を、当該電流指令値ACR(%)の特性曲線として、特性マップを作成する。
(もっと読む)
21 - 30 / 230
[ Back to top ]